2. Kinematics of Particles - Hacettepeyunus.hacettepe.edu.tr/~etanik/MMU204/2. KINEMATICS OF...
24
10/12/2015 1 2. Kinematics of Particles 2.1 Introduction 2.2 Rectilinear Motion 2.3 Plane Curvilinear Motion 2.4 Rectangular Coordinates ( − ) 2.5 Normal and Tangential Coordinates − 2.6 Polar Coordinates ( − ) 2.7 Relative Motion (Translating Axes) 2.8 Constrained Motion of Connected Particles 1 2.1 Introduction Choice of Coordinates • The position of particle P at any time t can be described by specifying its rectangular coordinates , , , its cylindrical coordinates , , , or its spherical coordinates , , . The motion of P can also be described by measurements along the tangen t and normal n to the curve. 2
Transcript of 2. Kinematics of Particles - Hacettepeyunus.hacettepe.edu.tr/~etanik/MMU204/2. KINEMATICS OF...

10/12/2015
1
2. Kinematics of Particles
2.1 Introduction
2.2 Rectilinear Motion
2.3 Plane Curvilinear Motion
2.4 Rectangular Coordinates (𝑥 − 𝑦)
2.5 Normal and Tangential Coordinates 𝑛 − 𝑡
2.6 Polar Coordinates (𝑟 − 𝜃)
2.7 Relative Motion (Translating Axes)
2.8 Constrained Motion of Connected Particles 1
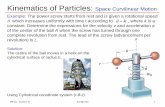
2.1 Introduction Choice of Coordinates
• The position of particle P at any time t can be described by specifying its rectangular coordinates 𝑥, 𝑦, 𝑧, its cylindrical coordinates 𝑟, 𝜃, 𝑧, or its spherical coordinates 𝑅, 𝜃, 𝜙. The motion of P can also be described by measurements along the tangen t and normal n to the curve.
2

10/12/2015
2
2.2 Rectilinear Motion
• Consider a particle 𝑃 moving along a straight line. The position of 𝑃 at any instant of time 𝑡 can be specified by its distance s measured from some convenient reference point O fixed on the line. At time 𝑡 + ∆𝑡 the particle has moved to 𝑃′ and its coordinate becomes 𝑠 + ∆𝑠. The change in the position coordinate during the interval ∆𝑡 is called the displacement ∆𝑠 of the particle. The displacement would be negative if the particle moved in the negative 𝑠-direction.
3
2.2 Rectilinear Motion Velocity and Acceleration
• The average velocity of the particle during the interval ∆𝑡 is the displacement divided by the time interval or 𝑣𝑎𝑣 = ∆𝑠/∆𝑡. As ∆𝑡 becomes smaller and approaches zero in the limit, the average velocity approaches the instantaneous velociy of the particle, which is
𝑣 = lim∆𝑡→0
∆𝑠
∆𝑡 or 𝑣 =
𝑑𝑠
𝑑𝑡= 𝑠
4

10/12/2015
3
2.2 Rectilinear Motion Velocity and Acceleration
• The average acceleration of the particle during the interval ∆𝑡 is the change in its velocity divided by the time interval or 𝑎𝑎𝑣= ∆𝑣/∆𝑡. As ∆𝑡 becomes smaller and approaches zero in the limit, the average acceleration approaches the instantaneous acceleration of the particle, which is
𝑎 = lim∆𝑡→0
∆𝑣
∆𝑡
𝑎 =𝑑𝑣
𝑑𝑡= 𝑣 or 𝑎 =
𝑑2𝑠
𝑑𝑡2= 𝑠
5
2.2 Rectilinear Motion Velocity and Acceleration (contd.)
By eliminating the time 𝑑𝑡 between the equations given below,
𝑣 =𝑑𝑠
𝑑𝑡= 𝑠
𝑎 =𝑑𝑣
𝑑𝑡= 𝑣
we obtain a differential equation relating displacement, velocity, and acceleration. This equation is
𝑣 𝑑𝑣 = 𝑎 𝑑𝑠 or 𝑠 𝑑𝑠 = 𝑠 𝑑𝑠
6

10/12/2015
4
2.2 Rectilinear Motion Analytical Integration
• When 𝑎 is constant , equations 𝑎 = 𝑑𝑣/𝑑𝑡 = 𝑣 and 𝑣 𝑑𝑣 = 𝑎 𝑑𝑠 can be integrated directly. For simplicity with 𝑠 = 𝑠0 , 𝑣 = 𝑣0 , and 𝑡 = 0 designated at the beginning of the interval, then for a time interval 𝑡 the integrated equations become
𝑑𝑣𝑣
𝑣0= 𝑎 𝑑𝑡
𝑡
0 or 𝑣 = 𝑣0 + 𝑎𝑡
𝑣 𝑑𝑣 =𝑣
𝑣0𝑎 𝑑𝑠
𝑠
𝑠0 or 𝑣2 = 𝑣0
2 + 2𝑎(𝑠 − 𝑠0)
CAUTION: The above equations have been integrated for constant acceleration only. A common mistake is to use these equations for problems involving variable acceleration, where they do not apply.
7
2.2 Rectilinear Motion Analytical Integration (contd.)
• Substitution of the integrated expression for 𝑣 into equation 𝑣 = 𝑑𝑠/𝑑𝑡 = 𝑠 and integration with respect to 𝑡 give
𝑑𝑠𝑠
𝑠0= 𝑣0 + 𝑎𝑡 𝑑𝑡
𝑡
0 or 𝑠 = 𝑠0 + 𝑣0𝑡 +
1
2𝑎𝑡2
CAUTION: The above equations have been integrated for constant acceleration only. A common mistake is to use these equations for problems involving variable acceleration, where they do not apply.
8

10/12/2015
5
2.2 Rectilinear Motion Sample Problem (1)
The position coordinate of a particle which is confined to move along a straight line is given by 𝑠 = 2𝑡3 − 24𝑡 + 6, where 𝑠 is measured in meters from a convenient origin and 𝑡 is in seconds. Determine
(a) The time required for the particle to reach a velocity of 72 m/s from its initial condition at 𝑡 = 0,
(b) The acceleration of the particle when 𝑣 = 30 m/s, and
(c) The net displacement of the particle during the interval from 𝑡 = 1 s to 𝑡 = 4 s.
9
Solution
10

10/12/2015
6
2.2 Rectilinear Motion Sample Problem (2)
When the effect of aerodynamic drag is included, the y-aacceleration of a baseball moving vertically upward is 𝑎𝑢 = −𝑔 −𝑘𝑣2, while the acceleration when the ball is moving downward is 𝑎𝑑 = −𝑔 + 𝑘𝑣2. If the ball is thrown upward at 30 m/s from essentially ground level, compute its maximum height ℎ and its speed 𝑣𝑓 upon impact with the ground. Take 𝑘 to be 0.006 m−1
and assume that 𝑔 is constant.
11
Solution
12

10/12/2015
7
2.3 Plane Curvilinear Motion • Consider now the continuous motion of a particle along a
plane curve as represented in Figure. At time t the particle is at position A, which is located by the position vector 𝐫 measured from some convenient fixed origin O. If both the magnitude and direction of r are known at time 𝑡, then the position of the particle is completely specified. At time 𝑡 + ∆𝑡, the particle is at A, located by the position vector 𝐫 + ∆𝐫.
13
2.3 Plane Curvilinear Motion (contd.) Velocity
• The instantaneous velocity 𝐯 of the particle is defined as the limiting value of the average velocity as the time interval approaches zero. Thus,
𝐯 = lim∆𝑡→0
∆𝐫
∆𝑡
• We observe that the direction of ∆𝐫 approaches that the tangent to the path as ∆𝑡 approaches zero and, thus, the velocity 𝐯 is always a vector tangent to the path.
14

10/12/2015
8
2.3 Plane Curvilinear Motion Velocity (contd.)
• We now extend the basic definition of the derivative of a scalar quantity to include a vector quantity and write
𝐯 =𝑑𝐫
𝑑𝑡= 𝐫
• The derivative of a vector is itself a vector having both magnitude and a direction. The magnitude of 𝐯 is called the speed and is the scalar
𝑣 = 𝐯 =𝑑𝑠
𝑑𝑡= 𝑠
15
2.3 Plane Curvilinear Motion Acceleration
• The average acceleration of the particle between 𝐴 and 𝐴′ is defined as ∆𝐯/∆𝑡, which is a vector whose direction is that of ∆𝐯 divided by ∆𝑡.
• The instantaneous acceleration 𝐚 of the particle is defined as the limiting value of the average acceleration as the time interval approaches zero. Thus,
𝐚 = lim∆𝑡→0
∆𝐯
∆𝑡
• By definition of the derivative, then, we write
𝐚 =𝑑𝐯
𝑑𝑡= 𝐯
16

10/12/2015
9
2.4 Rectangular Coordinates Vector Representation
• This system of coordinates is particularly useful for describing motions where the x- and y-components of acceleration are independently generated or determined.
𝐫 = 𝑥𝐢 + 𝑦𝐣
𝐯 = 𝐫 = 𝑥 𝐢 + 𝑦 𝐣
𝐚 = 𝐯 = 𝐫 = 𝑥 𝐢 + 𝑦 𝐣
17
2.4 Rectangular Coordinates Sample Problem (3)
18
A rocket has expended all its fuel when it reaches position 𝐴, where it has a velocity 𝐮 at an angle 𝜃 with respect to the horizontal. It then begins unpowered flight and attains a maximum added height ℎ at position 𝐵 after travelling a horizontal distance 𝑠 from 𝐴 to 𝐵. Determine the expressions for ℎ and 𝑠, the time 𝑡 of flight from 𝐴 to 𝐵, and the equation of the path. For the interval concerned, assume a flat earth with a constant gravitational acceleration 𝑔 and neglect atmospheric resistance.

10/12/2015
10
Solution
19
2.5 Normal and Tangential Coordinates (n-t)
• The n- and t-coordinates areconsidered to move along the path with the particle as seen in Figure where the particle advances from A to B to C.
20

10/12/2015
11
2.5 Normal and Tangential Coordinates (n-t) Velocity and Acceleration
• The magnitude of the velocity can be written 𝑣 = 𝑑𝑠/𝑑𝑡 = 𝜌 𝑑𝛽/ 𝑑𝑡, and we can write the velocity as the vector.
𝐯 = 𝑣𝐞𝐭 = 𝜌𝛽 𝐞𝐭
21
2.5 Normal and Tangential Coordinates (n-t) Velocity and Acceleration (contd.)
• The acceleration 𝐚 of the particle is defined as,
𝐚 =𝑑𝐯
𝑑𝑡=𝑑(𝑣𝐞𝐭)
𝑑𝑡= 𝑣𝐞𝐭 + 𝑣 𝐞𝐭
𝐞𝐭 = 𝛽 𝐞𝐧
𝐚 =𝑣2
𝜌𝐞𝐧 + 𝑣 𝐞𝐭
𝑎𝑛 =𝑣2
𝜌= 𝜌𝛽 2 = 𝑣𝛽
𝑎𝑡 = 𝑣 = 𝑠
𝑎 = 𝑎𝑛2 + 𝑎𝑡
2
22

10/12/2015
12
2.5 Normal and Tangential Coordinates (n-t) Geometric Interpretation
• It is especially important to observe that the normal component of acceleration 𝑎𝑛 is always directed toward the center of curvature C.
23
2.5 Normal and Tangential Coordinates (n-t) Circular Motion
𝑣 = 𝑟𝜃
𝑎𝑛 =𝑣2
𝑟= 𝑟𝜃 2 = 𝑣𝜃
𝑎𝑡 = 𝑣 = 𝑟𝜃
24

10/12/2015
13
2.5 Normal and Tangential Coordinates (n-t) Sample Problem (4)
To anticipate the dip and hump in the road, the driver of a car applies her brakes to produce a uniform deceleration. Her speed is 100 km/h at the bottom A of the dip and 50 km/h at the top C of the hump, which is 120 m along the road from A. If the passengers experience a total acceleration of 3 m/s2 at A and if the radius of curvature of the hump at C is 150 m, calculate
(a) the radius of curvature at A,
(b) the acceleration at the inflection point B, and
(c) the total acceleration at C.
25
Solution
26

10/12/2015
14
2.5 Normal and Tangential Coordinates (n-t) Sample Problem (5)
A football player releases a ball with the initial conditions shown in the figure. Determine the radius of curvature of the trajectory
(a) just after release and
(b) at the apex.
For each case, compute the time rate of change of the speed.
27
Solution
28

10/12/2015
15
2.6 Polar Coordinates (r-𝜃)
• The particle is located by the radial distance r from a fixed point and by an angular measurement 𝜃 to the radial line. Polar coordinates are particularly useful when a motion is constrained through the control of a radial distance and an angular position or when an unconstrained motion is observed by measurements of a radial distance and an angular position.
29
𝐫 = 𝑟𝐞𝐫
2.6 Polar Coordinates (r-𝜃) Time Derivatives of the Unit Vectors
Velocity
𝐯 = 𝐫 = 𝑟 𝐞𝐫 + 𝑟𝐞𝐫
𝐯 = 𝑟 𝐞𝐫 + 𝑟𝜃 𝐞𝛉
𝑣𝑟 = 𝑟
𝑣𝜃 = 𝑟𝜃
𝑣 = 𝑣𝑟2 + 𝑣𝜃
2
30

10/12/2015
16
2.6 Polar Coordinates (r-𝜃) Time Derivatives of the Unit Vectors (contd.)
Acceleration
𝐚 = 𝐯 = 𝑟 𝐞𝐫 + 𝑟 𝐞𝐫 + (𝑟 𝜃 𝐞𝛉 + 𝑟𝜃 𝐞𝛉 + 𝑟𝜃 𝐞𝛉 )
𝐚 = 𝑟 − 𝑟𝜃 2 𝐞𝐫 + (𝑟𝜃 + 2𝑟 𝜃 )𝐞𝛉
𝑎𝑟 = 𝑟 − 𝑟𝜃 2
𝑎𝜃 = 𝑟𝜃 + 2𝑟 𝜃
𝑎 = 𝑎𝑟2 + 𝑎𝜃
2
31
2.6 Polar Coordinates (r-𝜃) Circular Motion
• For motion in a circular path with r constant, the equations in polar coordinates become simply
Velocity 𝑣𝑟 = 0
𝑣𝜃 = 𝑟𝜃
Acceleration
𝑎𝑟 = −𝑟𝜃 2
𝑎𝜃 = 𝑟𝜃
32

10/12/2015
17
2.6 Polar Coordinates (r-𝜃) Sample Problem (6)
Rotation of the radially slotted arm is governed by 𝜃 = 0.2𝑡 +0.02𝑡3, where 𝜃 is in radians and 𝑡 is in seconds. Simultaneously, the power screw in the arm engages the slider B and controls its distance from O according to 𝑟 = 0.2 + 0.04𝑡2, where 𝑟 is in meters and 𝑡 is in seconds. Calculate the magnitudes of the velocity and acceleration of the slider for the instant when 𝑡 = 3 s.
33
Solution
34

10/12/2015
18
2.6 Polar Coordinates (r-𝜃) Sample Problem (7)
The piston of the hydraulic cylinder gives pin A a constant velocity 𝑣 = 1.5 m/s in the direction shown for an interval of its
motion. For the instant when 𝜃 = 60°, determine 𝑟, 𝑟 , 𝜃, and 𝜃 where 𝑟 = 𝑂𝐴.
35
Solution
36

10/12/2015
19
2.7 Relative Motion (Translating Axes)
• There are many engineering problems for which the analysis
of motion is simplified by using measurements made with respect to a moving reference system.
• The position vector of 𝐴 as measured relative to the frame 𝑥-𝑦 is 𝐫𝐴/𝐵 = 𝑥𝐢 + 𝑦𝐣 where the subscript notation 𝐴/𝐵 means 𝐴
relative to 𝐵 or 𝐴 with respect to 𝐵. The unit vectors along the 𝑥- and 𝑦-axes are 𝐢 and 𝐣, and 𝑥 and 𝑦 are the coordinates of 𝐴 measured in the 𝑥-𝑦 frame.
37
2.7 Relative Motion (Translating Axes) (contd.)
𝐫𝐴 = 𝐫𝐵 + 𝐫𝐴/𝐵
𝐫 𝐴 = 𝐫 𝐵 + 𝐫 𝐴/𝐵 𝐯𝐴 = 𝐯𝐵 + 𝐯𝐴/𝐵
𝐫 𝐴 = 𝐫 𝐵 + 𝐫 𝐴/𝐵 𝐚𝐴 = 𝐚𝐵 + 𝐚𝐴/𝐵
38

10/12/2015
20
2.7 Relative Motion (Translating Axes) Sample Problem (8)
Passengers in the jet transport A flying east at a speed of 800 km/h observe a second jet plane B that passes under the transport in horizontal flight. Although the nose of B is pointed in the 45 northeast direction, plane B appears to the passengers in A to be moving away from the transport at the 60° angle as shown. Determine the true velocity of B. 39
Solution
40

10/12/2015
21
2.7 Relative Motion (Translating Axes) Sample Problem (9)
Car A is accelerating in the direction of its motion at the rate of 1.2 m/s2 . Car B is rounding a curve of 150 m radius at a constant speed of 54 km/h . Determine the velocity and acceleration which car B appears to have to an observer in car A if car A has reached a speed of 72 km/h for the positions represented.
41
Solution
42

10/12/2015
22
2.8 Constrained Motion of Connected Particles
• Sometimes the motions of particles are interrelated because of the constraints imposed by interconnecting members. In such cases it is necessary to account for these constraints in order to determine the respective motions of the particles.
43
2.8 Constrained Motion of Connected Particles One Degree of Freedom
• The total length of the cable is
𝐿 = 𝑥 +𝜋𝑟22
+ 2𝑦 + 𝜋𝑟1 + 𝑏
Where 𝐿, 𝑟2, 𝑟1, and 𝑏 are constant, First and second time derivatives of all equation give:
0 = 𝑥 + 2𝑦 𝑜𝑟 0 = 𝑣𝐴 + 2𝑣𝐵
0 = 𝑥 + 2𝑦 𝑜𝑟 0 = 𝑎𝐴 + 2𝑎𝐵
44

10/12/2015
23
2.8 Constrained Motion of Connected Particles Sample Problem (10)
In the pulley configuration shown, cylinder A has a downward velocity of 0.3 m/s. Determine the velocity of B.
45
Solution
46

10/12/2015
24
2. Constrained Motion of Connected Particles Sample Problem (11)
For an interval of motion the drum of radius b turns clockwise at a constant rate 𝜔 in radians per second and causes the carriage P to move to the right as the unwound lenght of the connecting cable is shortened. Derive expressions for the velocity and acceleration of P in the horizontal guide in terms of the angle 𝜃.
47
Solution
48