1. Kinematics of Particles - Sejongdasan.sejong.ac.kr/~sjyoon/lecturenote/dong/Ch1.pdf · ·...
18
1-1 1. Kinematics of Particles 1.1 Introduction to Dynamics Dynamics - Kinematics: the study of the geometry of motion; relate displacement, velocity, acceleration, and time, without reference to the cause of the motion. - Kinetics: the study of the relation existing between the forces acting on a body, the mass of the body, and the motion of the body; predict the motion caused by given forces or determine the forces required to produce a given motion. 1.2 Position, Velocity, and Acceleration Rectilinear motion: motion along a straight line Position coordinate: x SI Units: m, sec Average velocity = Instantaneous velocity (m/s) = Speed: magnitude of v Average acceleration (m/s 2 ) = Instantaneous acceleration = or t x Δ Δ dt dx t x v t = Δ Δ = → Δ lim 0 t v Δ Δ 2 2 0 lim dt x d dt dv t v a t = = Δ Δ = → Δ dx dv v v dx dv dt dv a = = =
Transcript of 1. Kinematics of Particles - Sejongdasan.sejong.ac.kr/~sjyoon/lecturenote/dong/Ch1.pdf · ·...

1-1
1. Kinematics of Particles 1.1 Introduction to Dynamics
Dynamics
- Kinematics: the study of the geometry of motion; relate displacement, velocity, acceleration, and
time, without reference to the cause of the motion.
- Kinetics: the study of the relation existing between the forces acting on a body, the mass of the
body, and the motion of the body; predict the motion caused by given forces or determine the
forces required to produce a given motion.
1.2 Position, Velocity, and Acceleration Rectilinear motion: motion along a straight line
Position coordinate: x
SI Units: m, sec
Average velocity =
Instantaneous velocity (m/s) =
Speed: magnitude of v
Average acceleration (m/s2) =
Instantaneous acceleration =
or
tx
ΔΔ
dtdx
txv
t=
ΔΔ
=→Δ
lim0
tv
ΔΔ
2
2
0lim dt
xddtdv
tva
t==
ΔΔ
=→Δ
dxdvv
vdxdv
dtdva ===

1-2
1.3 Determination of the Motion of a Particle In general, the acceleration of a particle can be expressed as a function of one or more of variables x, v,
and t. Let us consider three common classes of motion:
( )tfa =
( )xfa =
( )vfa =
( )tfdtdva ==
( )( )
( )( )tvv
dttfvv
dttfdv
dttfdv
t
t
t
t
v
v
=
=−
=
=
∫
∫∫
0
00
0
( )( )∫=−
=t
tdttvxx
dttvdx
00
( )
( )( )
( )
( )xvv
dxxfvv
dxxfvdv
dxxfvdv
xfdxvdv
dtdva
x
x
x
x
v
v
=
=−
=
=
===
∫
∫∫
0
00
20
2
21
21
( )
( )∫=−
=
x
x xvdxtt
dtxv
dx
00
( )
( )
( )vfvdvdx
vfdvdt
vfdxvdv
dtdva
=
=
===

1-3
Example 1) The position of a particle which moves along a straight line is defined by the
relation , where x is expressed in meters and t in seconds. Determine (a)
the time at which the velocity will be zero, (b) the position and distance traveled by the particle at the
time, (c) the acceleration of the particle at that time, (d) the distance traveled by the particle from t = 4s to
t = 6s.
Ans) The equations of motion are
(1)
(2)
(3)
a) Time at which v = 0.
t = 5s
b) Position and Distance Traveled when v = 0.
Position at t = 5s:
Distance at t = 5s: 100m
c) Acceleration when v = 0.
d) Distance traveled from t = 4s to t = 6s.
The particle moves in the negative direction from t = 4s to t = 5s and in the positive direction from t = 5s
to t = 6s.
Example 2) A ball is tossed with a velocity of 10m/s directed vertically upward from a window located
20m above the ground. Knowing that the acceleration of the ball is constant and equal to 9.81m/s2
40156 23 +−−= tttx
40156 23 +−−= tttx
15123 2 −−== ttdtdxv
126 −== tdtdva
( )( ) 015542 =+−=−− tttt
)(6040515565 235 mx −=+×−×−=
)(400 mx =
100406005 −=−−=− xx
( )25 /181256 sma =−×=
( ) ( ) ( )mxxdisxxdiscedistotal 18108tan 5645 =+−=−+−=

1-4
downward, determine (a) the velocity v and elevation y of the ball above the ground at any time t, (b) the
highest elevation reached by the ball and the corresponding value of t, (c) the time when the ball will hit
the ground and the corresponding velocity.
Ans)
a) velocity and elevation
b) highest elevation
c) ball hits the ground
( )2/81.9, smggadtdv
=−==
( )smvgtvv 10, 00 =−=−
tv 81.910 −=
tdtdy 81.910 −=
( )2
02
0
905.41020
20,905.410
tty
myttyy
−+=
=−=−
( )myst
tdtdy
highest 1.25019.1905.4019.11020019.1
081.910
2 =×−×+=
=
=−=
( )smv
sorsttty
t 2.2228.381.910
28.3243.10905.41020
28.3
2
−=×−=
−=
=−+=
=

1-5
1.4 Uniform Rectilinear Motion When the velocity of a particle is constant,
1.5 Uniformly Accelerated Rectilinear Motion When the acceleration is constant,
or
1.6 Motion of Several Particles
Relative Motion of Two Particles
The relative position coordinate of B with respect to A is denoted by
The relative velocity of B with respect to A is denoted by
vtxx
dtvdx
tconsvdtdx
t
t
x
x
+=
=
==
∫∫0
00
tan
200
0
0
21
tan
00
attvxx
atvvdtdx
atvv
dtadv
tconsadtdv
t
t
v
v
++=
+==
+=
=
==
∫∫
( )02
02 2
tan
00
xxavv
dxavdv
tconsadxvdv
dtdv
x
x
v
v
−+=
=
===
∫∫
ABAB
ABAB
xxxor
xxx
+=
−=
ABAB
ABAB
vvvor
vvv
+=
−=

1-6
The relative acceleration of B with respect to A is denoted by
Dependent Motions
In the case of three blocks of Fig. 11.9,
then
Example 4)
A ball is thrown vertically from the 12-m level in an elevator shaft with an initial velocity of 18 m/s. At
the same instant an open-platform elevator passes the 5-m level, moving upward with a constant velocity
of 2m/s. Determine (a) when and where the ball will hit the elevator, (b) the relative velocity of the ball
with respect to the elevator when the ball hits the elevator.
Ans)
Motion of the Ball
: uniformly accelerated motion
Motion of the Elevator
: uniform motion
ABAB
ABAB
aaaor
aaa
+=
−=
variablesstate3
equationdependentlinearly1
2DOF:constant22 =++ CBA xxx
022022
=++=++
CBA
CBA
aaavvv
2200
0
905.4181221
81.918
ttattvyy
tatvv
B
B
−+=++=
−=+=
ttvyysmv
EE
E
252
0 +=+=+=

1-7
Ball Hits the Elevator
When the ball hits the elevator,
Example 5)
Collar A and block B are connected by a cable passing over
three pulleys C, D, and E as shown. Pulleys C and E are
fixed, while D is attached to a collar which is pulled
downward with a constant velocity of 75m/s. At t=0,
collar A starts moving downward form position K with a
constant acceleration and no initial velocity. Knowing that
the velocity of collar A is 300 mm/s as it passes through
point L,
( )myt
tttt
yy
E
BE
30.1265.32565.3
or39.0905.4181225 2
=×+==
−=
−+=+
=
( )sm
ttvvv EBEB
81.1965.381.916
81.916281.918
−=×−=
−=−−=−=

1-8
determine the change in elevation, the velocity, and the acceleration of block B when collar A passes
through L.
Ans)
Motion of Collar A
We place the origin O at the upper horizontal surface
and choose the positive direction downward.
At t = 0
When
Motion of Pulley D
At t = 1.333s
Motion of Block B
The total length of the cable is constant. Considering
the times t = 0 and t = 1.333s,
( )( )0
0 0
AA
A
xxv
=
=
LxA =
smmvA /300=( ) ( )[ ]
2
20
20
2
/225
20020300
2
smma
a
xxavv
A
A
AAAAA
=
×+=
−+=
( )
stt
tavv AAA
333.12250300
0
=+=
+=
smmva
D
D
/750
==
( ) ( ) txtvxx DDDD 7500 +=+=
( ) ( )mmxx DD 100333.1750 =×=−
( ) ( ) ( )( )[ ] ( )[ ] ( )[ ] 02
22
000
000
=−+−+−
++=++
BBDDAA
BDABDA
xxxxxxxxxxxx
( ) ( ) ( )( )[ ] ( )[ ] ( )[ ]
( )[ ]( ) mmxx
xxxxxxxx
xxxxxx
BB
BB
BBDDAA
BDABDA
40001002200
0222
0
0
000
000
−=−
=−+×+
=−+−+−
++=++

1-9
Homework 1
Problems 11.34, 11.41, 11.45, 11.47, 11.57
1.9 Position Vector, Velocity, and Acceleration
Curviliear motion: motion along a curve other than a straight
line
Position vector: position of the particle w.r.t. the reference
frame, r
Average velocity:
Instantaneous velocity:
Instantaneous acceleration:
1.10 Derivatives of Vector Functions Let P(u) and Q(u) be vector functions of the scalar variable u.
Then
Sum of two vector functions of the same scalar variable u:
Product of a scalar function f(u) and a vector function P(u):
2225
00222502
4500752300
02
smma
aaaa
smmvv
vvv
B
B
BDA
B
B
BDA
−=
=+×+=++
−==+×+
=++
( )tt
ΔΔr
( ) ( ) ( )dt
tdttt
t
rrv =Δ
Δ=
→Δlim
0
( ) ( ) ( )dt
tdttt
t
vva =Δ
Δ=
→Δlim
0
( )dud
dud
dud QPQP
+=+
( )dudf
dudf
dufd PPP
+=

1-10
Scalar product and vector product:
Rectangular components of the derivative of a vector function P(u):
where i, j, k are unit vectors corresponding to the x, y, z axes.
Rate of Change of a Vector:
The rate of change of a vector is the same with respect to a fixed frame and with respect to a frame
in translation.
1.11 Rectangular Components of Velocity and Acceleration The position vector r of a particle in rectangular axes can be written
where the coordinates x, y, z are functions of t. Differentiating twice, we obtain
1.12 Motion Relative to a Frame in Translation Fixed frame of Reference: the reference frame
attached to the earth
Moving Frames of Reference: the reference frame in
either translation or rotation
Any frame can be designated as “fixed; all other
frames not rigidly attached to this frame will be
described as “moving”.
( )dud
dud
dud QPQPQP
•+•=•
( )dud
dud
dud QPQPQP
×+×=×
kjiP ZYx PPP ++=
kjiPdudP
dudP
dudP
dud zyx ++=
kjiPdt
dPdt
dPdt
dPdtd zyx ++=
kjir zyx ++=
kjiva
kjirv
2
2
2
2
2
2
dtzd
dtyd
dtxd
dtd
dtdz
dtdy
dtdx
dtd
++==
++==

1-11
: The absolute motion of B can be obtained by combining the motion of A and the relative motion of B
with respect to the moving frame attached to A.
Example 1.8)
A projectile is fired with an initial velocity of 240m/s at a target B located 600m above the gun A and at a
horizontal distance of 3600m. Neglecting air resistance, determine the value of the firing angle α.
Ans)
Horizontal Motion
At x = 3600m
Vertical Motion
Projectile Hits Target
ABAB
ABAB
ABAB
aaa
vvv
rrr
+=
+=
+=
( )( )
α
αα
α
cos15
cos2403600cos240
cos240
0
0
=
=
==
=
t
tttvx
v
x
x
( )
( ) 220
20
90.4sin24021
81.9
sin240
ttattvy
sma
v
y
y
−=+=
−=
=
α
α
oo 6.69and9.29
69.2and574.0tan
600cos
1590.4sincos
152402
=
=
=⎟⎠⎞
⎜⎝⎛−=
α
αα
αα
y

1-12
Example1.9)
Automobile A is traveling east at the constant speed of
36km/h. As automobile A crosses the intersection shown,
automobile B starts from rest 35m north of the intersection
and moves south with a constant acceleration of 1.2m/s2.
Determine the position, velocity, and acceleration of B
relative to A 4s after A crosses the intersection.
Ans) We choose x and y axes with origin at the intersection
of the two streets and with positive senses directed
respectively east and north.
Motion of Automobile A
For any time t
For t = 5s
Motion of Automobile B
For any time t
For t = 5s
smvA 10=
( ) ttvxxsmv
a
AAA
A
A
100100
0 +=+===
( )mxsmv
a
A
A
A
50510100
=×===
( )
( ) ( ) 2200
0
2
2.121035
21
2.102.1
ttatvyy
ttavvsma
BBBB
BBB
B
××−+=++=
−=+=−=
( )
( )my
smvsma
B
B
B
2052.12135
0.652.12.1
2
2
=××−=
−=×−=−=

1-13
Motion of B Relative to A
We draw the triangle corresponding to the vector equation rB = rA+ rB/A and obtain the magnitude and
direction of the position vector of B relative to A.
rB/A= 53.9m α = 21.8°
vB/A = 11.66m/s β = 31.0°
Homework
Problems 11.97, 11.103, 11.120, 11.131

1-14
1.13 Tangential and Normal Components
Plane Motion of a Particle
See Fig. 11.21 and Fig. 11.22

1-15
Let us consider a particle which moves along a curve contained in the plane of the figure. Let P be the
position of the particle at a given instant. We attach at P a unit vector et tangent to the path of the
particle and pointing in the direction of motion. Let et / be the unit vector corresponding to the position
P/ of the particle at a later instant. Drawing both vectors from the same origin O/, we define the vector
Δet = et / - et . Since et / and et are of unit length, their tips lie on a circle of radius 1. Denoting by Δθ
the angle formed by et / and et , we find that the magnitude of Δet is 2sin(Δθ/2). Considering now the
vector Δet / Δθ, we note that as Δθ approaches zero, this vector becomes tangent to the unit circle,
perpendicular to et , and that its magnitude approaches
Denoting this vector by en , we wirte
Since the velocity v of the particle is tangent to the path, it can be expressed as the product of the scalar v
and the unit vector et :
But
where ρ is the radius of curvature of the path at P. Thus,
The scalar components of the acceleration are
( ) ( ) 12
2sin2sin2 limlim00
=Δ
Δ=
ΔΔ
→Δ→Δ θθ
θθ
θθ
θ
θθ
dd t
n
tn
ee
ee
=
ΔΔ
=→Δ
lim0
dtd
vdtdv
dtdv
tt
t
eeva
ev
+==
=
nnvv
dtds
dsd
dd
dtd
ee
ee tt
ρρ
θθ
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
=
1
nv
dtdv
dtd eeva t ρ
2
+==
ρ
2va
dtdva
n
t
=
=

1-16
1.14. Radial and transverse Components
See Fig. 11.25
In certain problems of motion, the position of the particle P is defined by its polar coordinates r and θ. It
is then convenient to resolve the velocity and acceleration of the particle into components parallel and
perpendicular, respectively, to the line OP. These components are called radial and transverse
components. A derivation similar to the one we used to determine the derivative of the unit vector et
leads to the relations
We express the time derivatives of the unit vectors as follows:
Using dots to indicate differentiation with respect to t,
The position vector r of P is expressed as rer. Thus,
Differentiating again wrt t,
rθ
θr
ee
ee
−=
=
θ
θ
dddd
dtd
dtd
dd
dtd
dtd
dtd
dd
dtd
θθθ
θθθ
rθθ
θrr
eee
eee
−==
==
rθ
θr
ee
ee
θ
θ&&
&&
−=
=
( )
θr
rrr
eev
eeev
θ&&
&&
rr
rrrdtd
+=
+==
( )θθθ
θr
eee
eeva
&&&&&&&&&&
&&
θθθ
θ
rrrerer
rrdtd
dtd
rr ++++=
+==

1-17
In the case of a particle moving along a circle of center O, we have r = constant:
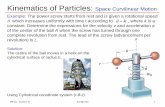
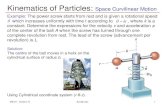
Extension to the Motion of a Particle in Space: Cylindrical Coordinates See fig. 11.26
The position of a particle P in space is sometimes defined by
its cylindrical coordinates R, θ, and z; unit vectors er, eθ, and k.
Then the position vector r of the particle P can be written as
Thus
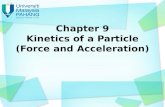
Example 1.10)
A motorist is traveling on a curved section of highway of
radius 2500ft at the speed of 60 mi/h. The motorist suddenly
applies the brakes, causing the automobile to slow down at a
constant rate. Knowing that after 8s the speed has been
reduced to 45mi/h, determine the acceleration of the
automobile immediately after the brakes have been applied.
Ans)
Tangential Component of Acceleration
( ) ( ) θr eea θθθ &&&&&&& rrrr 22 ++−=
θev θ&r=
θr eea θθ &&& rr +−= 2
ker R zR +=
( ) ( ) keeva
keerv
θR
θR
zRRRRdtd
zRRdtd
&&&&&&&&&
&&&
+++−==
++==
θθθ
θ
22
sfthmi
sftsfthmi
/66/45
/883600528060/60
=
=⎟⎠⎞
⎜⎝⎛×=
2/75.28
/88/66 sfts
sftsfttvat −=
−=
ΔΔ
=

1-18
Normal Component of Acceleration
Magnitude and Direction of Acceleration
Homework
Problems 11.141, 11.142, 11.169, 11.177, 11.C3
( ) 222
/10.32500
/88 sftftsftvan ===
ρ
2
2
2
/14.4sin
4.48/75.2/10.3tan
sfta
a
sftsft
aa
n
t
n
==
=
==
α
α
α
o