Kinematics of Particles Todayocw.snu.ac.kr/sites/default/files/NOTE/4389.pdf · 2018-01-30 ·...
17
Kinematics of Particles Today • Motion of several particles: Dependent motion • Definition of curvilinear motion • Representation of curvilinear motion – Using rectangular components Ui t ti l d l t – Using tangential and normal components – Using radial and transverse components 11 - 1
Transcript of Kinematics of Particles Todayocw.snu.ac.kr/sites/default/files/NOTE/4389.pdf · 2018-01-30 ·...

Kinematics of ParticlesTodayy
• Motion of several particles: Dependent motion• Definition of curvilinear motion• Representation of curvilinear motion
– Using rectangular componentsU i t ti l d l t– Using tangential and normal components
– Using radial and transverse components
11 - 1

Kinematics of ParticlesMotion of Several Particles: Dependent Motionp
• Position of a particle may depend on position of one or more other particles.or more other particles.
• Position of block B depends on position of block A.
• Why? What’s the relation? Rope length is constant!• Why? What s the relation? Rope length is constant!
=+ BA xx 2 constant (one degree of freedom)
• Positions of three blocks are dependent.
=++ CBA xxx 22 constant (two degrees of freedom)
• For linearly related positions, similar relations hold between velocities and accelerations.
022or022 =++=++
CBA
CBACBA
dvdvdv
vvvdt
dxdt
dxdt
dx
11 - 2
022or022 =++=++ CBACBA aaa
dtdv
dtdv
dtdv

Kinematics of ParticlesSample Problem 11.5p
SOLUTION:
• Define origin at upper horizontal surface g ppwith positive displacement downward.
• Collar A has uniformly accelerated rectilinear motion. Solve for acceleration and time t to reach L.
P ll D h if tili tiPulley D is attached to a collar which is pulled down at 3 cm/s. At t = 0,
ll A i d f K
• Pulley D has uniform rectilinear motion. Calculate change of position at time t.
• Block B motion is dependent on motionscollar A starts moving down from Kwith constant acceleration and zero initial velocity. Knowing that velocity
• Block B motion is dependent on motions of collar A and pulley D. Write motion relationship and solve for change of block B iti t tiof collar A is 12 cm/s as it passes L,
determine the change in elevation, velocity, and acceleration of block B
B position at time t.
• Differentiate motion relation twice to develop equations for velocity and
11 - 3
y,when block A is at L.
develop equations for velocity and acceleration of block B.

Kinematics of ParticlesGraphical Solution of Rectilinear-Motion Problemsp
• Given the x-t curve, the v-t curve is equal to the x-t curve slope.
• Given the v-t curve, the a-t curve is equal to the v-t curve slope.
11 - 4

Kinematics of ParticlesGraphical Solution of Rectilinear-Motion Problemsp
Gi h h h i l i b d i• Given the a-t curve, the change in velocity between t1 and t2 is equal to the area under the a-t curve between t1 and t2.
• Given the v-t curve, the change in position between t1 and t2 is equal to the area under the v-t curve between t1 and t2.
11 - 5

Kinematics of ParticlesCurvilinear Motion: Position, Velocity & Acceleration, y
• Particle moving along a curve other than a straight line is in curvilinear motion.
• How is a Position vector of a particle at time t defined?a vector between origin O of a fixed reference frame gand the position occupied by particle.
• Consider particle which occupies position P defined p p pby at time t and P’ defined by at t + Δt, rr r ′r
=Δ
=rdrv limrr
r
=
Δ→Δ dttv
t 0lim
instantaneous velocity (vector)
=ΔΔ
=→Δ dt
dstsv
t 0lim
11 - 6
= instantaneous speed (scalar)
Kinematics of ParticlesCurvilinear Motion: Position, Velocity & Acceleration, y
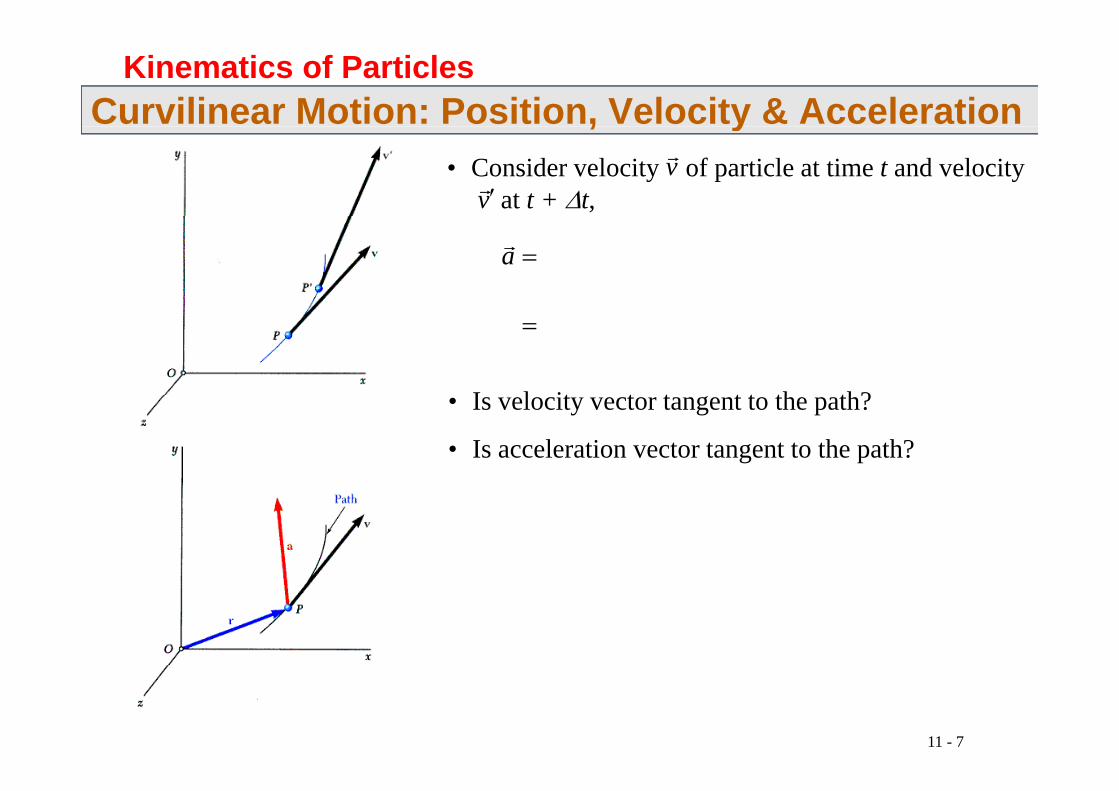
• Consider velocity of particle at time t and velocity at t + Δt,
vr
vr′
=ΔΔ
=→Δ dt
vdtva
t
rrr
0lim
= instantaneous acceleration (vector)
I l it t t t t th th?• Is velocity vector tangent to the path?
• Is acceleration vector tangent to the path?
11 - 7

Kinematics of ParticlesDerivatives of Vector Functions
( )uPr
• Let be a vector function of scalar variable u,( ) ( )uPuuPPPd −Δ+
=Δ
=rrrr
limlimuudu uu Δ
=Δ
=→Δ→Δ 00
limlim
• Derivative of vector sum,( )( )
duQd
duPd
duQPd
rrrr
+=+
( )duPdfP
dudf
duPfd
rr
r
+=
• Derivative of product of scalar and vector functions,
dududu
• Derivative of scalar product and vector product,( ) QdPdQPd
rrrr•( )
( ) QdPdQPd
duQdPQ
duPd
duQPd
rrrr
rr
×
•+•=•
11 - 8
( )duQdPQ
duPd
duQPd rr
×+×=×

Kinematics of ParticlesRectangular Components of Velocity & Accelerationg p y
• When position vector of particle P is given by its rectangular components,
kzjyixrrrrr ++=
• Velocity vector,
kzjyixkdtdzj
dtdyi
dtdxv
r&
r&
r&
rrrr ++=++=
kvjviv
jydt
jdtdt
zyxrrr
++=
• Acceleration vector,222
kzjyixkdt
zdjdt
ydidt
xda
r
r&&
r&&
r&&
rrrr ++=++= 2
2
2
2
2
2
11 - 9
kajaia zyxrrr
++=

Kinematics of ParticlesRectangular Components of Velocity & Accelerationg p y
• Rectangular components particularly effective when component accelerations can be integrated independently, e.g., motion of a projectile,
00 ==−==== zagyaxa zyx &&&&&&
i h i i i l di iwith initial conditions,( ) ( ) ( ) 0,,0 000000 ==== zyx vvvzyx
Integrating twice yields
( ) ( )( )
02
00 =−== vgtvvvv zyyxx
( ) ( ) 0221
00 =−== zgtyvytvx yx
• Motion in horizontal direction is uniform.
• Motion in vertical direction is uniformly accelerated.
• Motion of projectile could be replaced by two
11 - 10
• Motion of projectile could be replaced by two independent rectilinear motions.
Kinematics of ParticlesMotion Relative to a Frame in Translation
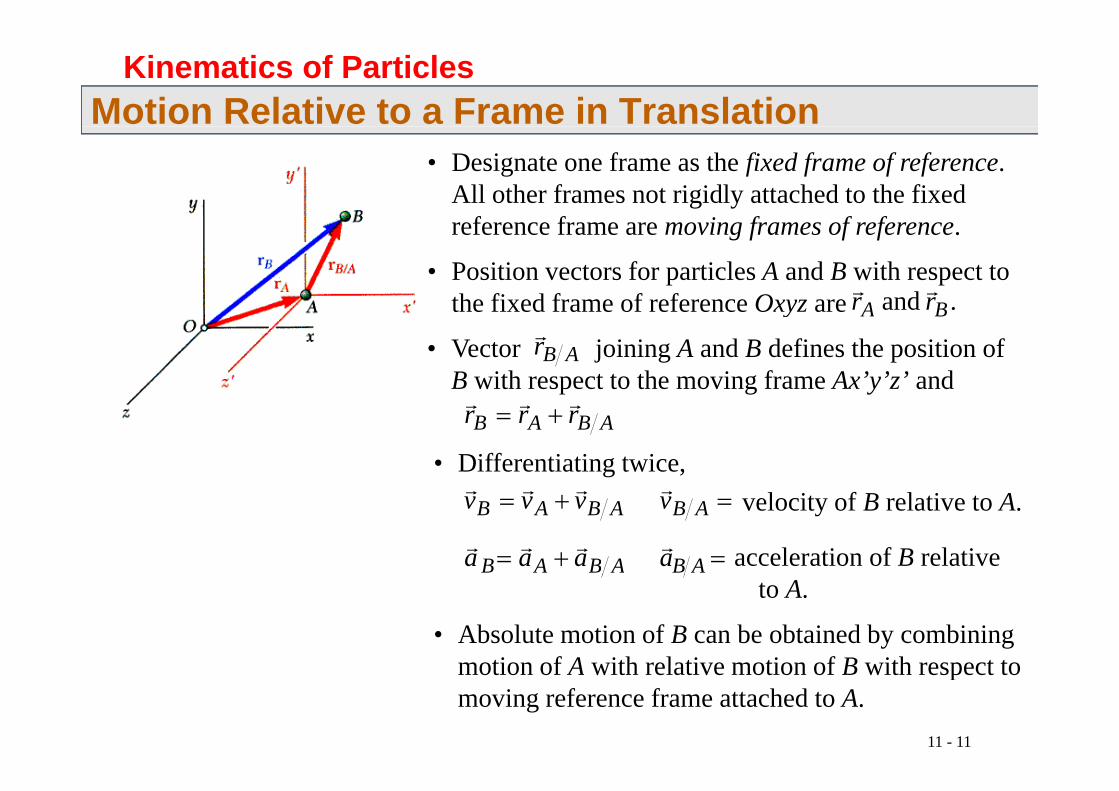
• Designate one frame as the fixed frame of reference. All other frames not rigidly attached to the fixed reference frame are moving frames of reference.
• Position vectors for particles A and B with respect to the fixed frame of reference Oxyz are and BA rr rrthe fixed frame of reference Oxyz are .and BA rr
• Vector joining A and B defines the position of B with respect to the moving frame Ax’y’z’ and
ABrr
ABAB rrr rrr +=
• Differentiating twice,=ABvr velocity of B relative to A.ABAB vvv rrr +=
=ABar acceleration of B relative ABAB aaa rrr +=to A.
• Absolute motion of B can be obtained by combining motion of A with relative motion of B with respect to
11 - 11
motion of A with relative motion of B with respect to moving reference frame attached to A.

Kinematics of ParticlesTangential and Normal Componentsg p
• Velocity vector of particle is tangent to path of particle. In general, acceleration vector is not.particle. In general, acceleration vector is not. Wish to express acceleration vector in terms of tangential and normal components. Why?
• are tangential unit vectors for the particle path at P and P’. When drawn with
t t th i i d
tt ee rr ′ and
rrr ′Δrespect to the same origin, andis the angle between them. Why ?
ttt eee rrr −′=ΔθΔ
( )θΔΔ 2i2
θΔ
( )
( )θθ
θ
θ
eee
e
nnt
t
rrr
=ΔΔ
=ΔΔ
Δ=Δ
22sinlimlim
2sin2
θ
θθ θθ
dede t
n
nn
rr =
ΔΔ →Δ→Δ 200
Direction of change of tangential term of theθdn
11 - 12
tangential term of the acceleration
Kinematics of ParticlesTangential and Normal Components
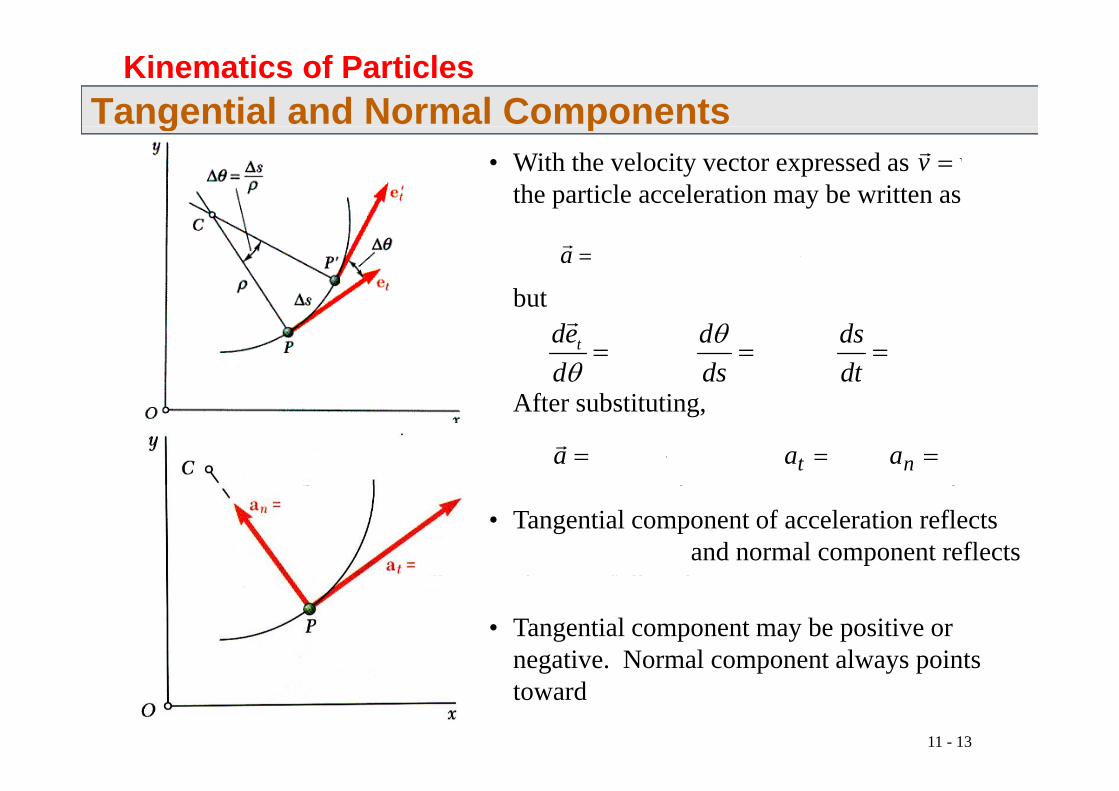
• With the velocity vector expressed asthe particle acceleration may be written as
g ptevv rr =
dtds
dsd
dedve
dtdv
dtedve
dtdv
dtvda t
tt
tθ
θ
rr
rr
rr
+=+==
butbut
vdtds
dsde
ded
nt ===
ρθ
θ1r
r
Af b i iAfter substituting,
ρρ
22 vadtdvaeve
dtdva ntnt ==+= rrr
ρρ
• Tangential component of acceleration reflects change of speed and normal component reflects h f di ichange of direction.
• Tangential component may be positive or negative Normal component always points
11 - 13
negative. Normal component always points toward center of path curvature.

Kinematics of ParticlesRadial and Transverse Componentsp
• When particle position is given in polar coordinates, it is convenient to express velocity and acceleration with components parallel and perpendicular to OP.
• The particle velocity vector is
( ) θθ e
dtdre
dtdr
dtedre
dtdrer
dtdv r
rrr
&
rrr
rrr +=+==
p y
dd rr
θθ erer rr&r
& +=
• Similarly, the particle acceleration vector isrerr rr =
rr e
dede
ded r
rr
r−==
θθθ
θ
dd
θθ e
dtdre
dtdr
dtda r
rrr
22
⎟⎠⎞
⎜⎝⎛ +=
dtde
dtd
ded
dted rr θθ
θ θr
rr==
ddeded θθθθrr ( ) ( )
θθθ
θθθ
θθθdted
dtdre
dtdre
dtd
dtdr
dted
dtdre
dtrd r
r
r&&&&r&&&
rrr
rr
22
2
2
2
2++++=
11 - 14
dtde
dtd
ded
dted
rθθ
θθθ r−== ( ) ( ) θθθθ errerr r
r&
r&& 22 ++−=

Kinematics of ParticlesRadial and Transverse Componentsp
• When particle position is given in cylindrical coordinates, it is convenient to express the velocity and acceleration vectors using the unit vectors . and ,, keeR
rrrθ
• Position vector,
kzeRr Rrrr +=
• Velocity vector,
kRRrd rr&r&r
r θ kzeReRdtrdv R &
rrr ++== θθ
• Acceleration vector• Acceleration vector,
( ) ( ) kzeRReRRdtvda R
r&&
r&&&&r&&&r
r +++−== θθθθ 22
11 - 15

Kinematics of ParticlesSample Problem 11.10p
• Calculate tangential and normal• Calculate tangential and normal components of acceleration.
( ) m752sm8866=
−=
Δ=
va
( )2
22
2
m10.3sm88s
75.2s 8
===
−==Δ
=
va
ta
n
t
A motorist is traveling on curved section of highway at 60 km/h. The motorist applies brakes causing a
2s10.3
m2500ρan
• Determine acceleration magnitude and di ti ith t t t t tmotorist applies brakes causing a
constant deceleration rate.
Knowing that after 8 s the speed has
direction with respect to tangent to curve.
( ) 2222 103752 +−=+= t aaag pbeen reduced to 66 m/s, determine the acceleration of the automobile immediately after the brakes are 752
10.3tantan 11 −− == naα
( ) 10.375.2 +=+= nt aaa
11 - 16
immediately after the brakes are applied.
75.2ta

Kinematics of ParticlesSample Problem 11.12p
Approach:
Wh t ki d f ti i thi ?What kind of motion is this?• Dependent motion• Curvilinear motion
Rotation of the arm about O is defined
• Rotation + rectilinear on the rotation
Rotation of the arm about O is defined by θ = 0.15t2 where θ is in radians and tin seconds. Collar B slides along the arm such that r = 0 9 - 0 12t2 where r is
• Motion of the arm M ti f th ll t t th
What are the knowns?
arm such that r = 0.9 - 0.12t where r is in meters.
After the arm has rotated through 30o,
• Motion of the collar w.r.t. to the arm
What do we want to know?g ,determine (a) the total velocity of the collar, (b) the total acceleration of the collar, and (c) the relative acceleration
• Absolute motion of the collar • Relative acceleration of the collar w.r.t
h
11 - 17
collar, and (c) the relative acceleration of the collar with respect to the arm. the arm