1-Kinematics of Particles 0
46
-
Upload
rabiatul-adawiah -
Category
Documents
-
view
452 -
download
26
Transcript of 1-Kinematics of Particles 0

Chapter Outline: Kinematics of Particles
1) Introduction2) Rectilinear Kinematics: Continuous Motion3) Rectilinear Kinematics: Erratic Motion4) Curvilinear Motion: Rectangular Components5) Motion of a Projectile6) Curvilinear Motion: Normal and Tangential
Components7) Curvilinear Motion: Cylindrical Components8) Constrained Coordinates and Cylindrical
Coordinates

1) Introduction
•Mechanics – the state of rest of motion of bodies subjected to the action of forces
•Static – equilibrium of a body that is either at rest or moves with constant velocity
•Dynamics – deals with accelerated motion of a body
1)Kinematics – treats with geometric aspects of the motion
2)Kinetics – analysis of the forces causing the motion

2) Rectilinear Kinematics: Continuous Motion
• Rectilinear Kinematics – specifying at any instant, the particle’s position, velocity, and acceleration
• Position1)Single coordinate axis, s2)Origin, O3)Position vector, r – specific location of particle P at
any instant4)Algebraic Scalar s in metres
Note : - Magnitude of s = Dist from O to P- The sense (arrowhead dir of r) is defined byalgebraic sign on s=> +ve = right of origin, -ve = left of origin

• Displacement – change in its position, vector quantity
• If particle moves from P to P’∆r = r’-r∆s = s’-s
• Velocity Average velocity,
Instantaneous velocity is defined as, speed
2) Rectilinear Kinematics: Continuous Motion
t
rvavg
)/(lim0
trvt
ins dt
drvins )/( sm
dt
dsv

• Average speed is defined as total distance traveled by a particle, sT, divided by the elapsed time ∆t.
• The particle travels along the path of length sT in time
2) Rectilinear Kinematics: Continuous Motion
t
sv T
avgsp )(
t
svavg

• Acceleration – velocity of particle is known at points P and P’ during time interval Δt, average acceleration is
• Instantaneous acceleration at time t is found by taking smaller and smaller values of Δt and corresponding smaller and smaller values of Δv,
t
vaavg
2) Rectilinear Kinematics: Continuous Motion
)/( 2smdt
dva
)/( 22
2
smdt
vda
a ds = v dv
• Particle is slowing down, its speed is decreasing => decelerating =>will be negative.• Consequently, a will also be negative, therefore it will act to the left, in the opposite sense to v• If velocity is constant, acceleration is zero

• Velocity as a Function of TimeIntegrate ac = dv/dt, assuming that initially v= v0 when t = 0.
Constant acceleration
2) Rectilinear Kinematics: Continuous Motion
dtadvv t
c 0 0
tavv c 0
• Position as a Function of Time
Integratev = ds/dt = v0 +
act, assuming that initially s = s0 when t = 0
Constant acceleration
dttavdss t
c )(0 0
0
200 2
1tatvss c
• Velocity as a Function of Position
Integratev dv = ac ds,
assuming that initially v = v0 at
s = s0
Constant acceleration
dsavdvv
v
s
s
c 0 0
)(2 020
2 ssavv c

The car moves in a straight line such that for a short time its velocity is defined by v = (0.9t2 + 0.6t) m/s where t is in sec. Determine it position and acceleration when t = 3s. When t = 0, s = 0.
Ans: s=10.8 m, a=6m/s2
Example 1:

Example 2:A small projectile is forced downward into a fluid medium with an initial
velocity of 60m/s. Due to the resistance of the fluid the projectile experiences a deceleration equal to a = (-0.4v2)m/s2, where v is in m/s2. Determine the projectile’s velocity and position 4s after it is fired.
34.0 vdt
dva
smtv
tv
dtv
dtv
dv
tv
v
sm
t
/8.0)60(
1
)60(
11
8.0
1
1
2
1
4.0
1
4.0
2
2
22
060
/60 03
2
When t=4s, v=0.599 m/s
mts
ts
dttds
tdt
dsv
t
s t
60
18.0
)60(
1
4.0
1
8.0)60(
1
8.0
2
8.0)60(
1
8.0)60(
1
2/1
2
0
2/1
2
2/1
0 02
2/1
2
When t=4s, s=4.43 m/s

Example 3:A rocket travel upward at 75 m/s. When it is 40m from the ground,
the engine fails. Determine max height sB reached by the rocket and its speed just before it hits the ground.
Solution: Rocket traveling upward, vA = +75m/s when t = 0. s = sB when vB = 0 at max ht. For entire motion, acceleration aC = -9.81m/s2 (negative since it act opposite sense to positive velocity or positive displacement)
ms
mssmsm
ssavv
B
B
ABCAB
327
)40)(/81.9(2)/75(0
)(222
22
sms
msm
ssavv
B
BCCBC
/1.80
)3270)(/81.9(20
)(22
22

• When particle’s motion is erratic, it is best described graphically using a series of curves that can be generated experimentally from computer output.
• a graph can be established describing the relationship with any two of the variables, a, v, s, t
• using the kinematics equations a = dv/dt, v = ds/dt, a ds = v dv
3) Rectilinear Kinematics: Erratic Motion

Given the s-t Graph, construct the v-t Graph•The s-t graph can be plotted if the position of the particle can be determined experimentally during a period of time t.•To determine the particle’s velocity as a function of time, the v-t Graph, use v = ds/dt•Velocity as any instant is determined by measuring the slope of the s-t graph
3) Rectilinear Kinematics: Erratic Motion
vdt
ds
Slope of s-t graph=velocity

3) Rectilinear Kinematics: Erratic Motion
Example 4:A bicycle moves along a straight road such that it position is described by the graph as shown. Construct the v-t and a-t graphs for 0 ≤ t ≤ 30s.v-t Graph. The v-t graph can be determined bydifferentiating the eqns defining the s-t graph
a-t Graph. The a-t graph can be determined bydifferentiating the eqns defining the lines of thev-t graph.

3) Rectilinear Kinematics: Erratic Motion
Given the a-t Graph, construct the v-t Graph• When the a-t graph is known, the v-t graph may be constructed using a = dv/dt
• Knowing particle’s initial velocity v0, and add to this small increments of area (Δv)• Successive points v1 = v0 + Δv, for the v-t graph• Each eqn for each segment of the a-t graph may be integrated to yield eqns for corresponding segments of the v-t graph

Example 5:
3) Rectilinear Kinematics: Erratic Motion
v-t Graph. The v-t graph can be determined byintegrating the straight-line segments of the a-t graph. Using initial condition v = 0 when t = 0,
A test car starts from rest and travels along a straight track such that it accelerates at a constant rate for 10 s and then decelerates at a constant rate. Draw the v-t and s-t graphs and determine the time t’ needed to stop the car. How far has the car traveled?
When t = 10s, v = 100m/s, using this as initial condition for the next time period, we have
When t = t’ we require v = 0. This yield t’ = 60 s

s-t Graph. Integrating the eqns of the v-t graph yields the corresponding eqns of the s-t graph. Using the initial conditions s = 0 when t = 0,
3) Rectilinear Kinematics: Erratic Motion
When t = 10s, s = 500m. Using this initial condition,
When t’ = 60s, the position is s = 3000m

3) Rectilinear Kinematics: Erratic Motion
Given the a-s Graph, construct the v-s Graph• v-s graph can be determined by using v dv = a ds, integrating this eqn between the limit v = v0 at s = s0 and v = v1 at s = s1
• determine the eqns which define the segments of the a-s graph• corresponding eqns defining the segments of the v-s graph can be obtained from integration, using v dv = a ds

Given the v-s Graph, construct the a-s Graph• v-s graph is known, the acceleration a at any position s can be determined using a ds = v dv
3) Rectilinear Kinematics: Erratic Motion
• At any point (s,v), the slope dv/ds of the v-s graph is measured• Since v and dv/ds are known, the value of a can be calculated

Example 6:
3) Rectilinear Kinematics: Erratic Motion
The v-s graph describing the motion of a motorcycle is shown in Fig 12-15a. Construct the a-s graph of the motion and determine the time needed for the motorcycle to reach the position s = 120 m.
Ans: At s=60m, t=8.05 s
Ans: At s=120m, t=12.0 s

• Curvilinear motion occurs when the particle moves along a curved path.
• Occasionally the motion of particle represent using a fixed x, y, z frame of reference.
4) Curvilinear Motion: Rectangular Components
Position. Position vector is defined by
The magnitude of r is always positive and defined as
The direction of r is specified by the components of the unit vector ur = r/r

4) Curvilinear Motion: Rectangular Components
The velocity has a magnitude defined as the positive value of
Velocity.
where
and a direction that is specified by the components of the unit vector uv=v/v and is always tangent to the path.

Acceleration.
where
4) Curvilinear Motion: Rectangular Components
The acceleration has a magnitude defined as the positive value of
• The acceleration has a direction specified by the components of the unit vector ua = a/a.• Since a represents the time rate of change in velocity, a will not be tangent to the path.

Example 7:
4) Curvilinear Motion: Rectangular Components
At any instant the horizontal position of the weather balloon is defined by x = (9t) m, where t is in second. If the equation of the path is y = x2/30, determine the distance of the balloon from the station at A, the magnitude and direction of the both the velocity and acceleration when t = 2 s.SolutionPositionWhen t = 2 x = 9(2)= 18 m, y = (18)2/30 = 10.8m The straight-line distance from A to B is
VelocityWe have
smxdt
dyv
smtdt
dxv
y
x
/8.1030/
/99
2

4) Curvilinear Motion: Rectangular Components
SolutionVelocityWhen t = 2 s, the magnitude of velocity is
The x is tangent to the path is
AccelerationWe have thus,
smv /1.148.109 22
2/4.5 and 0 smvava yyxx
222 /4.54.50 sma
900
4.5tan 1
a

5) Motion of Projectile
Horizontal component of velocity remain constant during the motion
Horizontal Motion Since ax = 0,
• Projectile’s acceleration always act vertically
• Projectile launched at (x0, y0) and path is defined in the x-y plane
• Air resistance is neglected• Only force is its
weight downwards• ac = g = 9.81 m/s2

Vertical. Positive y axis is directed upward, then ay = - g
5) Motion of Projectile
• Problems involving the motion of a projectile have at most three unknowns since only three independent equations can be written:- one in the horizontal direction- two in the vertical direction• Velocity in the horizontal and vertical direction are used to obtain the resultant velocity• Resultant velocity is always tangent to the path

Example 8:5) Motion of Projectile
A sack slides off the ramp with a horizontal velocity of 12 m/s. If the height of the ramp is 6 m from the floor, determine the time needed for the sack to strike the floor and the range R where the sacks begin to pile up.
Coordinate System. Origin of the coordinates is established at the beginning of the path, point A. Initial velocity of a sack has components (vA)x = 12 m/s and (vA)y = 0Acceleration between point A and B ay = -9.81 m/s2 Since (vB)x = (vA)x = 12 m/s, the three unknown are (vB)y, R and the time of flight tABVertical Motion. Vertical distance from A to B is known
Horizontal Motion.

Example 9:5) Motion of Projectile
The track for this racing event was designed so that the riders jump off the slope at 30°, from a height of 1m. During the race, it was observed that the rider remained in mid air for 1.5 s.Determine the speed at which he was traveling off the slope, the horizontal distance he travels before striking the ground, and the maximum height he attains. Neglect the size of the bike and rider.
SolutionCoordinate SystemOrigin is at point A. 3 unknown are vA, R and vB.
Vertical MotionSince time of flight and the vertical distance between the ends of the paths are known,
smvtatvyy AABCAByAAB /4.132
1)( 2

SolutionHorizontal MotionThe range R can be determined as
We can determine h directly without considering tAC
5) Motion of Projectile
4.17)5.1(30cos38.130
)(
mR
tvxx ABxAAB
mhh
yyavv ACcAc yy
28.3]0)1)[(81.9(2)30sin38.13()0(
][2)()(
22
22

6) Curvilinear Motion: Normal and Tangential Components• Path of motion of a particle is describe using n
and t coordinates which act normal and tangent to the path
• At the instant considered have their origin located at the particle
Planar Motion• Origin happen to coincide
with the location of the particle

6) Curvilinear Motion: Normal and Tangential Components
Planar Motion• Curve can be constructed from a series of
differential arc segments ds• Plane contains n and t axes is referred to as
osculating plane and is fixed in the plane of motion

Velocity.• Since the particle is moving, s is a function of time• Particle’s velocity v has direction that is always tangent
to the path and a magnitude that is determined by taking the time derivative of the path function s = s(t)
6) Curvilinear Motion: Normal and Tangential Components
tvv u where
Acceleration• Acceleration of the particle is the time rate of change of velocity

6) Curvilinear Motion: Normal and Tangential Components• As the particle moves along the arc ds in time dt, ut preserves its magnitude of unity• When particle changes direction, it becomes ut’
• d ut stretches between the arrowhead of ut and ut’, which lie on an infinitesimal arc of radius ut = 1
where
• Magnitude of acceleration is the positive value of

When the skier reaches the point A along the parabolic path, he has a speed of 6m/s which is increasing at 2m/s2. Determine the direction of his velocity and the direction and magnitude of this acceleration at this instant. Neglect the size of the skier in the calculation.
Example 10:
6) Curvilinear Motion: Normal and Tangential Components
Coordinate System. Establish the origin of the n, t axes at the fixed point A on the path and determine the components of v and a along these axes.
Velocity. The velocity is directed tangent to the path.
v make an angle of θ = tan-1 = 45° with the x axis

Acceleration. Determined from
6) Curvilinear Motion: Normal and Tangential Components
The acceleration becomes

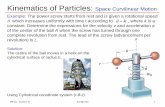
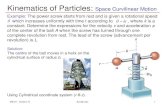
7)Curvilinear Motion: Cylindrical Components
Polar Coordinates• Location of P use both the radial
coordinate r and a traverse coordinate θ which is counterclockwise angle
• Angle measured in deg or rad where 1 rad = 180°
Position• At any instant, position
defined by position vector

7)Curvilinear Motion: Cylindrical Components
Acceleration• For small angles, ∆uθ= - ∆θur• We write the acceleration in component
form as
• Since ar and aθ are always perpendicular
• Acceleration is not tangent to the path
2 , , 2r r ra a u a u a r r a r r
222 2 rrrra

7)Curvilinear Motion: Cylindrical Components
Cylindrical Coordinates • When P moves along a space, location is
specified by the three cylindrical coordinates r, θ, z
• Position, velocity, acceleration of the particle is written as
zr
zr
zrp
uzurrurra
uzururv
uzurr
)2()( 2

7)Curvilinear Motion: Cylindrical Components
Time Derivatives2 common problems:a. When coordinates are specified as r = r(t)
and θ = θ(t), time derivative can be formed directly
b. When time parametric equations are not given, need to specify r = f(θ) and relationship between the time derivatives using the chain rule of calculus

The rob OA is rotating in the horizontal plane suchthat θ = (t3) rad. At the same time, the collar B issliding outwards along OA so that r = (100t2)mm. Ifin both cases, t is in seconds, determine thevelocity and acceleration of the collar when t = 1s.
7)Curvilinear Motion: Cylindrical Components
Example 11:

7)Curvilinear Motion: Cylindrical Components
Cont. Example 11:

• Degrees of freedom? Degrees of freedom are translations and/or rotations that
specify the position and/or orientation of a system• Constrains?Constraints are restrictions on translations and/or rotations
that limit the position and/or orientation of a system
8)Constrained Motion of Connected Particles

• One Degree of FreedomSimple system of two
interconnected particlesWith L, r2,r1, and bare constantHorizontal motion (x) of A is
twice the vertical motion (y) of BOnly one variable (x or y) is
needed to specify the positions of all parts of the system
8)Constrained Motion of Connected Particles

In the pulley configuration below, cylinder A has a downward velocity of 0.3 m/s. Determine the velocity of B. Solve in two ways.
8)Constrained Motion of Connected Particles
Example 12:

• Two Degree of FreedomPosition of lower cylinder
depends on two variables (yA and yB)
8)Constrained Motion of Connected Particles