5 Dynamics of systems of particles II, Kinematics of...
23
5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5.1 In-class problem Consider N point masses m i at positions ~ r i . Show that the angular momentum ~ H O with respect to an arbitrary fixed origin O may be written as ~ H O = M ( ~ r CM × ˙ ~ r CM )+ ~ H CM . (5.1) ~ H CM is the angular momentum with respect to the center of mass ~ r CM = 1 M ∑ N i=1 m i ~ r i , and M = ∑ N i=1 m i is the total mass. In particular, this result applies to rigid bodies, where we have the additional requi- rement that | ~ r i - ~ r j | = const. . Remark: In the notation of Chapter IV.3 of the lecture notes, C := CM . Denoting the vector pointing from C to O by ~ r CO , i., e. ~ r CO = -~ r CM , and using ~ P = M ˙ ~ r CM , Eq. (5.1) can be rewritten as ~ H O = ~ H C + ~ P × ~ r CO . (5.2) This is the angular momentum transfer formula. Solution I. Geometry For i ∈{1, ..., N }, we introduce ~ ρ i = ~ r i - ~ r CM : II. Analyze ~ H CM , compute the system angular momentum ~ H O The definition of ~ H CM is: ~ H CM = N X i=1 ~ ρ i × ~ P i = N X i=1 m i ~ ρ i × ˙ ~ r i . (5.3) 5-1
Transcript of 5 Dynamics of systems of particles II, Kinematics of...

5 Dynamics of systems of particles II,Kinematics of planar rigid bodies
5.1 In-class problem Consider N point masses mi at positions ~ri. Show that theangular momentum ~HO with respect to an arbitrary fixed origin O may be written as
~HO = M(~rCM × ~̇rCM) + ~HCM . (5.1)
~HCM is the angular momentum with respect to the center of mass ~rCM = 1M
∑Ni=1mi~ri,
and M =∑N
i=1mi is the total mass.
In particular, this result applies to rigid bodies, where we have the additional requi-rement that |~ri − ~rj| = const. .
Remark: In the notation of Chapter IV.3 of the lecture notes, C := CM . Denotingthe vector pointing from C to O by ~rCO, i., e. ~rCO = −~rCM , and using ~P = M~̇rCM ,Eq. (5.1) can be rewritten as
~HO = ~HC + ~P × ~rCO. (5.2)
This is the angular momentum transfer formula.
Solution
I. Geometry
For i ∈ {1, ..., N}, we introduce ~ρi = ~ri − ~rCM :
II. Analyze ~HCM , compute the system angular momentum ~HO
The definition of ~HCM is:
~HCM =N∑i=1
~ρi × ~Pi =N∑i=1
mi~ρi × ~̇ri. (5.3)
5-1

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-2
Using ~ri = ~rCM + ~ρi,
~HCM =N∑i=1
mi~ρi × (~̇rCM + ~̇ρi) =
(N∑i=1
mi~ρi
)× ~̇rCM +
N∑i=1
mi~ρi × ~̇ρi. (5.4)
By considering the definition of the center of mass, we simplify: Recall that the center ofmass is ’the geometric point with respect to which the total mass moment of the systemis zero’ (cf. lecture notes, p. 29). This means:
N∑i=1
mi (~ri − ~rCM) =N∑i=1
mi~ρi = 0 (5.5)
Using this in (5.4), we see that for ~HCM it is enough to consider only
~HCM =N∑i=1
mi~ρi × ~̇ρi . (5.6)
We now compute ~HO:
~HO =N∑i=1
mi~ri × ~̇ri (5.7)
=N∑i=1
mi (~rCM + ~ρi)×(~̇rCM + ~̇ρi
)(5.8)
=N∑i=1
mi~rCM × ~̇rCM +N∑i=1
mi~rCM × ~̇ρi +N∑i=1
mi~ρi︸ ︷︷ ︸=0
×~̇rCM +N∑i=1
mi~ρi × ~̇ρi︸ ︷︷ ︸= ~HCM by (5.6)
(5.9)
=M ~rCM × ~̇rCM + ~rCM ×
(N∑i=1
mi~̇ρi
)+ ~HCM . (5.10)
The definition of the center of mass (5.5) immediately implies that
d
dt
N∑i=1
mi~ρi =N∑i=1
mi~̇ρi = 0 . (5.11)
Plugging this into (5.10), we obtain
~HO = M(~rCM × ~̇rCM) + ~HCM . (5.12)
We mention that the following terminology exists, although we are not going to use it: Thefirst term of (5.12), M(~rCM × ~̇rCM), is sometimes referred to as the ’angular momentumof the center of mass’ (which can be misleading since the center of mass is not a real pointmass), the second one is simply the angular momentum of the N point masses m1, ...,mN
with respect to the center of mass CM . Another version is to refer to M(~rCM × ~̇rCM) as
the ’orbital contribution’ to the system angular momentum ~HO, and to ~HCM as the ’spincontribution’ to the system angular momentum ~HO.

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-3
5.2 In-class problem We consider a dumbbell (dt. ”Hantel”) formed by two pointmasses m1, m2 at positions ~r1, ~r2, connected by a rigid massless rod of length l. At timet = 0, the dumbbell is thrown into the air:
• Initially, its center of mass ~rCM(t = 0) is at the origin O of an arbitrary fixedreference system.
• The initial velocity of the center of mass is ~v0.
• Introducing ~R = ~r1 − ~r2, let its initial orientation be such that ~R(t = 0) is alignedwith ~v0,
• The initial relative velocity is ~̇R(t = 0) = ~u0, with ~u0 perpendicular to ~v0.
Include gravity in the treatment, but neglect effects of atmospheric resistance. The goalof this exercise is to find the trajectories of the two point masses, ~r1(t) and ~r2(t).
(a ) Find the trajectory of the center of mass ~rCM(t).
Using the result of Ex. 5.1, we decompose the angular momentum ~HO with respect to thefixed origin O into
~HO = M(~rCM × ~̇rCM) + ~HCM , (5.13)
where M = m1 + m2, and ~HCM is the angular momentum with respect to the center ofmass.
(b ) Using the result from part (a), write down the solution for M(~rCM × ~̇rCM).
(c ) Find a concise expression for ~HCM in terms of ~R = ~r1 − ~r2.
(d ) Show that ~HCM = const. and infer what this implies geometrically.
(e ) Recalling Ex. 4.1, treat the problem in a frame that moves with m2, and use the
result of (d) together with |~R| = l = const. to find the trajectories ~r1(t) and ~r2(t).
(f ) Describe the trajectories of m1 and m2.
Solution
(a)
I. Geometry

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-4
We have |~R| = |~r1 − ~r2| = l = const. .
II. Free-body diagram
III. Apply the appropriate principles
Way 1, linear momentum principle for a system of particles:
~̇P =2∑i=1
~F exti . (5.14)
Using
~̇P = M~̈rCM , ~F exti = mi~g, (5.15)
we find
~̈rCM = ~g. (5.16)
Way 2, linear momentum principle for each particle:
~̇P1 =m1~g + ~K12 (5.17)
~̇P2 =m2~g + ~K21 (5.18)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-5
Using ~̇Pi = mi~̈ri for i = 1, 2, we find
~̈rCM =1
M
2∑i=1
mi~̈ri (5.19)
=1
m1 +m2
(m1~g + ~K12 +m2~g + ~K21
). (5.20)
By Newton’s third law, ~K21 = − ~K12, and therefore we arrive at the same result as inEq. (5.16),
~̈rCM = ~g. (5.21)
Way 2 was just an explicit calculation parallel to what had already been shown in thelecture on p. 30.
IV. Solve the equation of motion for the center of mass
Integrate (5.16) with initial conditions ~rCM(t = 0) = 0, ~̇rCM(t = 0) = ~v0:
~rCM(t) =1
2~g t2 + ~v0 t. (5.22)
(b)
From (5.22), we obtain
~̇rCM = ~g t+ ~v0, (5.23)
and therefore
M(~rCM × ~̇rCM) =M
(1
2~g t2 + ~v0 t
)× (~g t+ ~v0)
=1
2M(~v0 × ~g)t2. (5.24)
(c)
I. Geometry
We introduce ~ρ1 = ~r1 − ~rCM and ~ρ2 = ~r2 − ~rCM :

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-6
II. Compute the angular momentum
In order to evaluate ~HCM , we need expressions for ~ρ1 and ~ρ2:
~ρ1 =~r1 − ~rCM (5.25)
=~r1 −1
m1 +m2
(m1~r1 +m2~r2) (5.26)
=m2
m1 +m2
(~r1 − ~r2) (5.27)
=m2
M~R, (5.28)
and similarly,
~ρ2 = −m1
M~R. (5.29)
Now we compute ~HCM and use (5.28) and (5.29) to replace the occurrences of ~ρ1 and ~ρ2:
~HCM =2∑i=1
~ρi × ~Pi (5.30)
Ex. 1: (5.6)= m1~ρ1 × ~̇ρ1 +m2~ρ2 × ~̇ρ2 (5.31)
=m1m
22
M2~R× ~̇R +
m2m21
M2~R× ~̇R (5.32)
= µ ~R× ~̇R, (5.33)
In the last step we again identified the reduced mass
µ =m1m2
m1 +m2
, (5.34)
as known from Ex. 4.1. Altogether we get
~HO = ~HO(t) =1
2M(~v0 × ~g)t2 + µ ~R(t)× ~̇R(t), (5.35)
where ~R(t) is unknown at this point.

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-7
(d)
The goal is to show that ~HCM = const. i.e.,
d
dt~HCM =
d
dtµ~R× ~̇R = µ~R× ~̈R
(?)= 0. (5.36)
We therefore need to show that ~R and ~̈R are parallel: Going to a moving frame whoseorigin is always at m2, the motion of m1 is given by ~R(t). The equation of motion is:
~̈R= ~̈r1 − ~̈r2 (5.37)
=~g +~K12
m1
− ~g −~K21
m2
. (5.38)
This yields the result that was already obtained in Ex. 4.1:
~̈R =~K12
µ. (5.39)
We know that the constraint force ~K12 is parallel to ~R. Combining this with Eq. (5.39),
we conclude that ~R is indeed parallel to ~̈R, and thus, by Eq. (5.36), ~HCM = const. .
What is the geometric meaning of this? ~HCM = µ~R × ~̇R implies that, at any given
instant t, ~R(t), ~̇R(t) are in a plane that is normal to ~HCM(t). Since we have shown that
~HCM = const., we know that the orientation of this plane containing ~R(t), ~̇R(t) remains
the same throughout time. However, since ~R points from m2 to m1, the plane still has tomove with m2.
1
(e)
We would like to find ~R(t), and from that ~ρ1(t), ~ρ2(t), ~r1(t) and ~r2(t).
I. Geometry: Choose an appropriate moving reference frame to describe themotion of m1 relative to m2
We introduce a moving reference frame with origin Q in m2. Let it be spanned by (time-
independent) unit vectors ~I, ~J , ~K, and make the following choices:
• We pick ~I aligned with ~R(t = 0), i. e. with ~v0:
~I :=~v0|~v0|
. (5.40)
1This picture relies on ~̇R(0) being perpendicular to ~R(0), so that ~HCM = const. 6= ~0. What would
happen otherwise, if ~HCM = ~0 = const.? First of all, because of the constraint |~R(t)| = l, any ~̇R(t) that
has a component parallel to ~R(t) is not admissible. This immediately rules out all initial conditions where
~̇R(0) is parallel to ~R(0), and thus ~HCM = ~0. However, for ~̇R(0) = ~0, one does indeed get ~HCM = ~0. By
conservation of ~HCM = ~0 and |~R(t)| = l = const., the conclusion is then that for all time ~̇R(t) = ~0. This
means ~R(t) = ~R(0) = const., which is a trivial case.

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-8
• We pick ~J aligned with ~̇R(t = 0) = ~u0:
~J :=~u0|~u0|
. (5.41)
• Finally, we define:
~K := ~I × ~J. (5.42)
~K will therefore be aligned with ~HCM = const. .
This looks as follows:
II. Take the equation of motion and express it in the moving frame
The Q-frame moving with m2 is non-inertial, so there’s not the option to blindly draw afree-body diagram and use the linear momentum principle to get the equation of motion.Fortunately however, we have already obtained it above, it is Eq. (5.39):
~̈R =~K12
µ. (5.43)
The goal of this step is to express this equation of motion in the ~I, ~J , ~K-frame, i. e. we
need to find expressions for ~̈R and ~K12.
We start with ~̈R: Since ~R(t), ~̇R(t) are in the plane spanned by ~I and ~J , we may write~R(t) using polar coordinates %, θ that are defined as follows:
~R(t) = (%(t) cos θ(t)) ~I + (%(t) sin θ(t)) ~J. (5.44)
Using |~R(t)| = l = const. we can immediately simplify:
~R(t) = l cos θ(t)~I + l sin θ(t) ~J. (5.45)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-9
We also introduce the (time-dependent) unit vectors:
~e% = cos θ~I + sin θ ~J, (5.46)
~eθ =− sin θ~I + cos θ ~J. (5.47)
Their time derivatives have the following properties:
~̇e% =− sin(θ)θ̇~I + cos(θ)θ̇ ~J = θ̇~eθ, (5.48)
~̇eθ =− cos(θ)θ̇~I − sin(θ)θ̇ ~J = −θ̇~e%. (5.49)
Starting from (5.45), and using Eqs. (5.46) to (5.49), we get:
~R(t) = l ~e%(t) (5.50)
~̇R(t) = lθ̇ ~eθ(t) (5.51)
~̈R(t) = lθ̈~eθ(t)− lθ̇2~e%(t) (5.52)
Now we consider ~K12: Since ~K12 is always parallel to ~R, we can immediately give
~K12 = −| ~K12|~e%. (5.53)
Remark: A force that can be written in the general form F (ρ)~e% is called a central force(other examples: gravitational force, Coulomb force).
With Eqs. (5.52) and (5.53), we may write the equation of motion (5.43) as
lθ̈~eθ − lθ̇2~e% = −|~K12|µ
~e% (5.54)
If we look at the %-component of (5.54) by taking the scalar product with ~e% on bothsides, using ~e% · ~e% = 1, we get the scalar equation
−lθ̇2 = −|~K12|µ
. (5.55)
Repeating this for the θ-component of (5.54), we get:
lθ̈ = 0. (5.56)
III. Solve the equation of motion
We need to integrate Eqs. (5.55) and (5.56) that represent the equation of motion (5.43)from time 0 to time t. The needed initial conditions for θ and θ̇ are obtained from thegiven initial conditions for ~R and ~̇R as follows:
To get θ(0), we take the expression for ~R(t) in (5.45) with t = 0 and impose that itshould be equal to l ~v0|~v0| , since R(0) was supposed to be aligned with ~v0. Then, by definition
(5.40), ~v0 can be replaced again by l ~I:
~R(0) = l cos θ(0) ~I + l sin θ(0) ~J!
= l~v0|~v0|
(5.40)= l ~I . (5.57)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-10
This is satisfied by choosing θ(0) = 0.
To get θ̇(0), take the expression for ~̇R(t = 0), set it equal to ~u0, and then also use
the definition of ~J , Eq. (5.41):
~̇R(0) = −l θ̇(0) sin θ(0)~I + l θ̇(0) cos θ(0) ~J = l θ̇(0) ~J!
= ~u0(5.41)= |~u0| ~J . (5.58)
From this, we conclude θ̇(0) = |~u0|/l.
Integrating (5.56) then gives
θ̇(t)− θ̇(0) = 0, (5.59)
and therefore, introducing the constant angular velocity ω,
θ̇(t) =|~u0|l
=: ω = const. . (5.60)
Integrating this and using θ(0) = 0, we get
θ(t) =|~u0|lt = ωt . (5.61)
It is not necessary to determine | ~K12| (see also the second solution to Problem 2.4),but rearranging the yet unused Eq. (5.55), and plugging in (5.60) yields
| ~K12| = µ l θ̇(t)2 = µ|~u0|2
l. (5.62)
To summarize, the final result is
~R(t) = l cos(ωt)~I + l sin(ωt) ~J , ω =|~u0|l. (5.63)
IV. Transform the solution back to the center of mass frame, and fromthere back to the original inertial frame
Our solution for ~R(t) can now be transformed back to the center of mass frame by using(5.28) and (5.29):
~ρ1(t) =m2
Ml(
cos(ωt)~I + sin(ωt) ~J), (5.64)
~ρ2(t) =m1
Ml(− cos(ωt)~I − sin(ωt) ~J
). (5.65)
In order to write down the full solution with respect to the inertial frame, we need toinclude the center of mass motion, Eq. (5.22). Using their definitions (5.40), (5.41), we
also replace ~I, ~J in terms of the initial conditions. The result is:
~r1(t) =1
2~g t2 + ~v0 t+
m2
Ml
(cos(ωt)
~v0|~v0|
+ sin(ωt)~u0|~u0|
), (5.66)
~r2(t) =1
2~g t2 + ~v0 t+
m1
Ml
(− cos(ωt)
~v0|~v0|− sin(ωt)
~u0|~u0|
). (5.67)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-11
(f)
What do the different ways of displaying the solution (or parts of it) tell us?
• (5.63): From the view of mass m2, mass m1 rotates around it with constant frequencyω2π
at fixed distance l. By definition of ~I and ~J , the rotation of the rod is confinedto a plane that is parallel to both ~v0 and ~u0.
• (5.64), (5.65): From the view of the center of mass, m1 and m2 rotate on circlesof radii lm2
Mand lm1
M, respectively. The motion of the rod is confined to a circular
double cone with apex in the center of mass.
• The view of the person who throws the dumbbell, (5.66), (5.67): The center of massmoves like a single point mass thrown into the air. Relative to it, m1, m2 rotate oncircles.

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-12
5.3 Homework We consider a pendulum consi-sting of a mass, M , suspended by a rigid rod of lengthL. The pendulum is initially at rest and the mass ofthe rod can be neglected. A bullet of mass m velocity~vm impacts M and stays embedded in it. Determinethe angle θm reached by the pendulum. The angle thatthe velocity vector ~vm forms with the horizontal is α.
Solution
0. NotationNote that t− and t+ denote the times just before and after the impact, respectively. Wedenote the velocity of the bullet with ~vm, the velocity of the pendulum with ~vM and thevelocity of the system with ~vm+M .
I. Choose the reference systemSet the reference system as shown on the figure of the assignment.
II. Draw the free-body diagram
III. Apply angular momentum principleThe external forces acting on the two particles are gravity and the reaction from the rod.It turns out that gravity is not an impulsive force and therefore its effect on the totalangular impulse, over a very short time interval, can be safely neglected. On the otherhand, we can expect the reaction from the rod to be large, but the line of action of thenormal reaction ~N always intersects the z axis. Thus, it produces no torque about thez-axis. As a result, the corresponding time rate of change of angular momentum is zero.This means the z-component of the angular momentum of the system with respect to anarbitrary fixed reference point on the z-axis is conserved during the impact.
(HO)z(t−) = (HO)z(t+) (5.68)
Now we consider the angular momentum about point O of the particles m and M justbefore and after the impact.The angular momentum before impact is
(HO)z(t−) = L cosαm|~vm(t−)|+ LM |~vM(t−)| . (5.69)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-13
Note that |~vM(t−)| = 0.Just after the impact, the velocity ~vm+M has to be horizontal. Thus, the angular momen-tum after impact is
(HO)z(t+) = L(M +m)|~vm+M(t+)| . (5.70)
Substituting (5.69) and (5.70) into (5.68), we get
|~vm+M(t+)| = m
m+M|~vm(t−)| cosα . (5.71)
Just after the impact, the system is conservative, because all forces are either potential(m~g) or do no work ( ~N). So the maximum angle can be obtained from the conservationof energy,
T (t+) + V (t+) = T (tm) + V (tm) ,
1
2(m+M)|vm+M(t+)|2 − (m+M)|~g|L = −(m+M)|~g|L cos θm ,
1
2(m+M)|vm+M(t+)|2 = (m+M)|~g|L(1− cos θm) . (5.72)
Substituting (5.71) into (5.72) and solving for θm, we get
θm = arccos
[1−
(m
M +m
)2 |vm(t−)|2 cos2 α
2|~g|L
]. (5.73)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-14
5.4 Homework Consider the equation ~vB = ~vA+~vB/A (veloci-ty transfer formula), which describes the relative velocities of twopoints A and B in plane motion in terms of non-rotating referenceaxes. Determine the relative-acceleration equation by differentia-ting the equation with respect to time. Simplify the final formula.
Solution
I. Choose the reference systemSet the reference system as shown on the figure of the assignment.
II. Differentiation of the velocity transfer formula with respect to time
We know that1
~̇rAB = ~ω × ~rAB , (5.74)
and the velocity transfer formula (or relative velocity formula) is given by:
~vB = ~vA + ~vB/A = ~vA + ~ω × ~rAB . (5.75)
The acceleration of point B with respect to point A can be expressed as the time derivativeof (5.75)
~aB = ~aA + ~aB/A = ~aA + ~̇ω × ~rAB + ~ω × ~̇rAB . (5.76)
Naming the angular acceleration ~ε = ~̇ω and using (5.74) and (5.76), yields
~aB = ~aA + ~ε× ~rAB + ~ω × (~ω × ~rAB) . (5.77)
Using triple product expansion 2 for the third term, we get
~aB = ~aA + ~ε× ~rAB + ~ω · (~ω · ~rAB)− ~rAB · (~ω · ~ω) . (5.78)
Since we are dealing with planar motion, ~ω is always perpendicular to ~rAB, therefore
~ω · (~ω · ~rAB) = 0 . (5.79)
Substituting ~ω · ~ω = |~ω|2 and (5.79) into (5.78), yields
~aB = ~aA + ~ε× ~rAB − |~ω|2~rAB . (5.80)
It is easy to realize it geometrically (try!).From (5.80), the relative acceleration is
~aB/A = ~ε× ~rAB − |~ω|2~rAB . (5.81)
1Please make sure you re-read page 42 and 44 in the lecture notes.2http://en.wikipedia.org/wiki/Triple_product

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-15
It is important to observe that the ~ε×~rAB term is the tangential acceleration componentof B with respect to A, since its direction is always perpendicular to ~rAB. And −|~ω|2~rABis the corresponding normal component, since its direction goes always from B towardsA. Therefore we can also write that
~aB = ~aA + (~aB/A)t + (~aB/A)n , (5.82)
where (~aB/A)t = ~ε× ~rAB and (~aB/A)n = −|~ω|2~rAB(For better understanding, examine the next figure).
It is also worthy to observe that if A is a fix point, we get the absolute acceleration of Bby using relative acceleration formula.

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-16
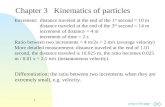
5.5 Homework Crank CB oscillatesabout C through a limited arc, causingcrank OA to oscillate about O. When thelinkage passes the position shown with CBhorizontal and OA vertical, the angular ve-locity ωCB = 2 rad/s counterclockwise. Forthis instant, determine the angular velocityand acceleration 1 of links of OA and BA.
Solution
0. NotationWe use the following notations for vectors:
~rOA =
(~rOA)x(~rOA)y(~rOA)z
= (~rOA)x~i+ (~rOA)y~j + (~rOA)z~k
If only one vector’s component different from 0, we use the following notation:
~rOA =
0(~rOA)y
0
= (~rOA)y~j = rOA~j
I. Choose the reference systemSet the reference system as shown the figure of the assignment. 2
II. Velocity transfer formulaThe velocity transfer formula is rewritten as
~ωOA × ~rOA = ~ωCB × ~rCB + ~ωBA × ~rBA . (5.83)
Remember we are asked to consider only a particular snapshot of the system.Using unit vectors to express the variables, we get~rOA = rOA~j,~rCB = rCB~i,~rBA = (~rBA)x~i+ (~rBA)y~j,
~ωOA = ωOA~k,~ωCB = ωCB~k = 2~k,~ωBA = ωBA~k.
From the geometry we know that
~rOA =
(0
100
)~rCB =
(−75
0
), ~rBA =
(−175
50
).
1You may need to be familiar with the solution of problem 5.4.2The coordinate system is always right-handed.

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-17
Substituting the unit vector expressions into (5.83) gives
ωOA~k × rOA~j = ωCB~k × rCB~i+ ωBA~k × ((~rBA)x~i+ (~rBA))y~j) ,
−ωOArOA~i = ωCBrCB~j + ωBA(~rBA)x~j − ωBA(~rBA)y~i . (5.84)
Matching coefficients of the respective ~i and ~j terms gives
ωBA(~rBA)y~i− ωOArOA~i = 0 and ωCBrCB~j + ωBA(~rBA)x~j = 0 . (5.85)
Substituting the known values and solving (5.85), we getωOA = −3/7 rad/s and ωBA = −6/7 rad/s.
The minus signs indicate that the vectors ωBA and ωOA are in the negative z-direction.Hence, the angular velocities are clockwise.
III. Angular accelerationsThe acceleration of point A with respect to point O and point B with respect to point Ccan be written as
~aA = ~aO + ~εOA × ~rOA − ω2OA~rOA , (5.86)
~aB = ~aC + ~εCB × ~rCB − ω2CB~rCB . (5.87)
Since O and C are fix points, ~aO = ~0 and ~aC = ~0. We also know that ωCB is constant,therefore ~εCB = ~0. Substituting these quantities and rewriting (5.86) and (5.87) with unitvectors, we get
~aA = −εOArOA~i− ω2OArOA~j , (5.88)
~aB = −ω2CBrCB~i . (5.89)
The acceleration of point A with respect to point B is
~aA = ~aB + ~εBA × ~rBA − ω2BA~rBA . (5.90)
Substituting (5.89) into (5.90) and rewriting (5.90) with unit vectors, yields
~aA = −ω2CBrCB~i+ εBA~k× ((~rBA)x~i) + εBA~k× ((~rBA)y~j)−ω2
BA(~rBA)x~i−ω2BA(~rBA)y~j .
(5.91)
Substituting (5.88) into (5.91) and equating separately the coefficients of the~i-componentsand the coefficients of the ~j-components, yields
−εOArOA~i = −ω2CBrCB~i− εBA(~rBA)y~i+ ω2
BA(~rBA)x~i , (5.92)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-18
−ω2OArOA~j = εBA(~rBA)x~j − ω2
BA(~rBA)y~j . (5.93)
Plugging in the known quantities in (5.93), we get
εBA = −0.105 rad/s2 ,
~εBA = εBA~k = −0.105~k rad/s2 . (5.94)
Substituting the known quantities and (5.94) into (5.92), we get
εOA = −4.34 rad/s2 ,
~εOA = εOA~k = −4.34~k rad/s2 . (5.95)
Since the unit vector ~k points out from the paper in the positive z-direction, we see thatthe angular accelerations of BA and OA are both clockwise (negative).

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-19
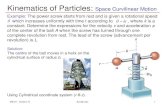
5.6 Homework The planetary gear system is usedin an automatic transmission for an automobile. Bylocking or releasing certain gears, it has the advantageof operating the car at different speeds. Consider thecase where the ring gear R is held fixed, ωR=0, andthe sun gear S is rotating at ωS = 5 rad/s. Determinethe angular velocity of each of the planet gears P andshaft A.
Solution
0. NotationIf only one vector component is different from 0, we use the following notation:
~rOA =
0(~rOA)y
0
= (~rOA)y~j = rOA~j
I. Choose the reference systemSet the right-handed reference system as shown on the next figure.
II. Velocity transfer formulaThe velocity transfer formula for point B with respect to point D is
~vB = ~vD + ~ωP × ~rDB . (5.96)
The velocity of point D is given by
~vD = ~ωS × ~rFD . (5.97)
and we know also that ~vB = ~0.Now (5.96) became
0 = ~ωS × ~rFD + ~ωP × ~rDB . (5.98)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-20
Rewriting it by unit vectors, we get
0 = ωS~k × rFD~j + ωP~k × rDB~j ,
0 = −ωSrFD~i− ωP rDB~i . (5.99)
Solving (5.99) for ωP
ωP = −ωS · rFDrDB
= −5 rad/s (in the ~k direction) . (5.100)
The velocity transfer formula for point C with respect to point B is
~vC = 0 + ~ωP × ~rBC . (5.101)
We also know that the velocity of C has to be
~vC = ~ωA × ~rAP , (5.102)
where ~rAP is the position vector in the x − y plane which points from the center of theupper planet gear P to the center of the shaft A (equivalently ~rFC).
Equating (5.101) and (5.102) and solving for ωA, we get
ωA =ωP rBCrAP
= 1.67 rad/s (in the ~k direction) . (5.103)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-21
5.7 Homework If the slider block A is moving tothe right at vA = 8 m/s, determine the velocity ofblocks B and C at the instant shown. Member CD ispin connected to member ADB.
Solution
0. NotationWe use the following notations for vectors:
~rOA =
(~rOA)x(~rOA)y(~rOA)z
= (~rOA)x~i+ (~rOA)y~j + (~rOA)z~k
If only one vector component is different from 0, we use the following notation:
~rOA =
0(~rOA)y
0
= (~rOA)y~j = rOA~j
I. Choose the reference systemSet the right-handed reference system as shown on the next figure.
II. Express the variables with respect to the chosen reference system
Position vectors~rAB = (~rAB)x~i+ (~rAB)y~j,
~rAD = (~rAD)x~i+ (~rAD)y~j,
~rCD = (~rCD)x~i+ (~rCD)y~j.

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-22
Velocities~vA = vA~i,~vB = vB~j,~vC = vC~j,~vD = (~vD)x~i+ (~vD)y~j.
Angular velocities
~ωADB = ωADB~k,~ωCD = ωCD~k.Those are the angular velocities of the 2 members ADB and CD.
III. Velocity transfer formulaThe velocity transfer formula for point B with respect to point A is
~vB = ~vA + ~ωADB × ~rAB , (5.104)
vB~j = vA~i+ ωADB~k × ((~rAB)x~i+ (~rAB)y~j) , (5.105)
vB~j = vA~i+ ωADB(~rAB)x~j − ωADB(~rAB)y~i . (5.106)
Equating ~i components and substituting the known values, we get
ωADB = 2.828 rad/s
Equating ~j components and substituting the known quantities, yields
vB = 8 m/s
Now we can write the velocity transfer formula for point D with respect to point A.
~vD = ~vA + ~ωADB × ~rAD (5.107)
(~vD)x~i+ (~vD)y~j = vA~i+ ωADB~k × ((~rAD)x~i+ (~rAD)y~j) (5.108)
(~vD)x~i+ (~vD)y~j = vA~i+ ωADB(~rAD)x~j − ωADB(~rAD)y~i (5.109)
Equating ~i and ~j components and substituting the known quantities, yields
(~vD)x = 4 m/s and (~vD)y = 4 m/s.
In order to get velocity of C, we use velocity transfer formula for point C with respect topoint D.
~vC = ~vD + ~ωCD × ~rCD (5.110)

5 Dynamics of systems of particles II, Kinematics of planar rigid bodies 5-23
vC~j = (~vD)x~i+ (~vD)y~j + ωCD(~rCD)x~j − ωCD(~rCD)y~i (5.111)
Equating ~i components and substituting the known quantities, we get
ωCD = 4.00 rad/s.
Equating ~j components and substituting the known quantities, yields
vC = −2.93 m/s.