Standardized pseudospectral formulation of the inviscid...
28
Standardized pseudospectral formulation of the inviscid supsersonic blunt body problem q Gregory P. Brooks a,1 , Joseph M. Powers b, * ,2 a Air Force Research Laboratory, Wright-Patterson AFB, OH 45433, USA b Department of Aerospace and Mechanical Engineering, University of Notre Dame, 372 Fitzpatrick Hall of Engineering, Notre Dame, IN 46556-5637, USA Received 21 February 2003; received in revised form 24 November 2003; accepted 25 November 2003 Available online 23 December 2003 Abstract A highly accurate pseudospectral numerical approximation to the generalized coordinate, nonconservative form of the Euler equations is implemented for supersonic flow over an axisymmetric blunt body geometry; shock fitting is employed to maintain global accuracy and minimize the corrupting influence of numerical viscosity. The variables in the Euler equations as well as the physical grid coordinates are collocated via Lagrange interpolating polynomials and the problem is then cast in the standard form of a large system of ordinary differential equations, dx=ds ¼ qðxÞ, which can be solved using standard solution techniques that do not require an explicit criteria for the minimum time step. Code verification is performed by demonstrating through a series of grid refinement tests that the error in the ap- proximation to a Taylor–Maccoll solution converges to 10 12 . Grid refinement tests for flow over a blunt body show convergence of the numerical error also to 10 12 . The code is validated for supersonic flow over a blunt body by comparison with the modified Newtonian approximation for the surface pressure distribution and empirical predictions for the shock shape. The ability of the method to capture unsteady flow phenomena is demonstrated on the problem of a planar acoustic wave interacting with an attached shock. Ó 2003 Elsevier Inc. All rights reserved. Keywords: Shock fitting; Supersonic blunt body; Euler equations; Pseudospectral method; System of ordinary differential equations Journal of Computational Physics 197 (2004) 58–85 www.elsevier.com/locate/jcp q This study has received primary support from the United States Air Force Palace Knight Program and additional support from Los Alamos National Laboratory. * Corresponding author. Tel.: +574-631-5978; fax: +574-631-8341. E-mail addresses: [email protected] (G.P. Brooks), [email protected] (J.M. Powers). 1 Research Aerospace Engineer. 2 Associate Professor. 0021-9991/$ - see front matter Ó 2003 Elsevier Inc. All rights reserved. doi:10.1016/j.jcp.2003.11.017
Transcript of Standardized pseudospectral formulation of the inviscid...
-
Journal of Computational Physics 197 (2004) 58–85
www.elsevier.com/locate/jcp
Standardized pseudospectral formulation of the inviscidsupsersonic blunt body problem q
Gregory P. Brooks a,1, Joseph M. Powers b,*,2
a Air Force Research Laboratory, Wright-Patterson AFB, OH 45433, USAb Department of Aerospace and Mechanical Engineering, University of Notre Dame, 372 Fitzpatrick Hall of Engineering,
Notre Dame, IN 46556-5637, USA
Received 21 February 2003; received in revised form 24 November 2003; accepted 25 November 2003
Available online 23 December 2003
Abstract
A highly accurate pseudospectral numerical approximation to the generalized coordinate, nonconservative form of
the Euler equations is implemented for supersonic flow over an axisymmetric blunt body geometry; shock fitting is
employed to maintain global accuracy and minimize the corrupting influence of numerical viscosity. The variables in
the Euler equations as well as the physical grid coordinates are collocated via Lagrange interpolating polynomials and
the problem is then cast in the standard form of a large system of ordinary differential equations, dx=ds ¼ qðxÞ, whichcan be solved using standard solution techniques that do not require an explicit criteria for the minimum time step.
Code verification is performed by demonstrating through a series of grid refinement tests that the error in the ap-
proximation to a Taylor–Maccoll solution converges to 10�12. Grid refinement tests for flow over a blunt body show
convergence of the numerical error also to 10�12. The code is validated for supersonic flow over a blunt body by
comparison with the modified Newtonian approximation for the surface pressure distribution and empirical predictions
for the shock shape. The ability of the method to capture unsteady flow phenomena is demonstrated on the problem of
a planar acoustic wave interacting with an attached shock.
� 2003 Elsevier Inc. All rights reserved.
Keywords: Shock fitting; Supersonic blunt body; Euler equations; Pseudospectral method; System of ordinary differential equations
qThis study has received primary support from the United States Air Force Palace Knight Program and additional support from Los
Alamos National Laboratory.*Corresponding author. Tel.: +574-631-5978; fax: +574-631-8341.
E-mail addresses: [email protected] (G.P. Brooks), [email protected] (J.M. Powers).1 Research Aerospace Engineer.2 Associate Professor.
0021-9991/$ - see front matter � 2003 Elsevier Inc. All rights reserved.doi:10.1016/j.jcp.2003.11.017
mail to: [email protected]
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 59
1. Introduction
As a prerequisite for developing a new technique for shape optimization of bodies in supersonic flow[1], we require a highly accurate flow solution technique. Consequently, in this work, we present a
pseudospectral numerical approximation to the solution for the supersonic, inviscid flow of a calorically
perfect ideal gas over an axisymmetric blunt body in standardized form. The shock is fitted since ap-
proximation of discontinuous solutions with high order polynomials exhibits the Gibbs phenomenon in
the form of global oscillations in the solution [2]. These oscillations can cause the numerical scheme to
become unstable, and attempts to remove the oscillations by spectral filtering or by addition of artificial
viscosity significantly reduces the accuracy of the numerical method. The more common alternative of
shock capturing, while generally stable and nonoscillatory, yields only first order accuracy [3].While the main motivation of our work is to have high accuracy steady state solutions available for use
in a shape optimization procedure, we note there are outstanding questions regarding numerical and
physical instabilities in multi-dimensional shock dynamics for which a standard formulation of
dx=ds ¼ qðxÞ has value. As stated in [4–11], the issues of shock stability are controversial since it is not clearwhat effects are real and which ones are purely numerical artifacts. Although shock stability will not be
investigated in the current work, the shock fitting method used here is the most appropriate for addressing
fundamental stability questions for inviscid flows due to the significantly low level of numerical viscosity
inherent in the method. Furthermore, should a physical instability exist, one would like to have a numericalmethod with sufficient robustness to automatically select the time step so as to resolve the dynamics, and
because of the additional dynamic equations which arise from the unsteady shock wave, a simple CFL
criterion is insufficient in the general case. Fortunately, the casting of the discretized governing equations
into the form dx=ds ¼ qðxÞ allows the use of standard software packages which have automatic time stepselection, precluding the necessity of an explicit condition for numerical stability. As such, we place em-
phasis here on obtaining this standard form.
We briefly review the literature on solutions to the supersonic flow over blunt body geometries.
Rusanov [12] and Hayes and Probstein [13] have given thorough reviews of early contributions, ofwhich a few will be mentioned. Two methodologies for calculating solutions to the supersonic flow
about a blunt body are the direct and inverse methods. In the direct method the body shape is
specified, and then the shock shape and flow field are calculated. In the inverse method the shock shape
is specified, and the body shape which would support that shock shape is calculated. At first, studies
concerning the inverse problem were based on series expansion of the governing equations in the vi-
cinity of the shock wave [14]. Later, numerical solutions to the inverse, supersonic blunt body problem
were performed by Garabedian and Lieberstein [15] and Van Dyke [16]. Evans and Harlow [17] were
the first to generate numerical solutions to the direct problem by integrating the unsteady Eulerequations to a relaxed steady state solution. Moretti and Abbett [18] used finite differences and fitting
of the shock to generate accurate solutions of the Euler equations about a blunt body; this laid the
foundation for subsequent shock fitting numerical schemes. Pseudospectral approximations to the Euler
equations employing shock fitting with spectral filtering were first performed by Hussaini et al. [19] and
without spectral filtering by Kopriva [20]. The numerical technique employed in the current paper
builds on the work by Kopriva [20,21], and Brooks and Powers [22].
We briefly review the pseudospectral methods. An early unified mathematical description of the theory
of spectral and pseudospectral methods was given by Gottlieb and Orszag [2]. Significant advances oc-curred in the late 1970s and early 1980s and are well documented by Canuto et al. [23], with particular
application to fluid dynamics. For a more recent review, see [24].
There does not appear to be complete consensus in the literature for the definition of pseudospectral; a
definition is adopted here which we believe useful and consistent with that of Fornberg [25]. We define a
pseudospectral method to be a collocation type of method of weighted residuals, as defined by Finlayson
-
60 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
[26], in which the error in the solution to the governing equations is driven to zero at collocation points; the
flow quantities are represented in terms of global Lagrange interpolating polynomials defined at the col-
location points. The spatial derivatives of the flow quantities are then calculated by differentiating theLagrange interpolating polynomials. Efficient algorithms for calculating derivatives of Lagrange interpo-
lating polynomials on arbitrary grids can be found in [25]; these algorithms were used in the current work.
A property of the pseudospectral method is that approximations to derivatives have global support, making
it equivalent to a finite difference scheme with a stencil that extends over the entire domain. As the number
of points is increased, the size of the stencil grows, leading to a higher order accurate solution.
2. Supersonic blunt body flow and pseudospectral solver
2.1. Standard formulation
Before presenting the geometry, governing equations, boundary and initial conditions for the blunt body
problem, we will briefly outline the procedure for formulating this problem as a system of ordinary dif-
ferential equations (ODEs). The Euler equations, physical grid evolution equations, shock velocity equa-
tion, and boundary conditions defined over the computational domain
X : n 2 ½0; 1�; g 2 ½0; 1�f g; ð1Þ
and bounded by S, can be written in the form of the following coupled system of time-dependent partialdifferential and algebraic equations
oy
osþ f y; oy
on;oy
og
� �¼ 0; ð2Þ
g y;oy
on;oy
og
� �¼ 0; ð3Þ
along with the initial conditions
y n; g; 0ð Þ ¼ y0 n; gð Þ; ð4Þ
where n and g are independent spatial variables in the computational space, and f and g are nonlinearfunctions of the dependent variables yðn; g; sÞ and its spatial derivatives. All of the algebraic constraints,Eq. (3), are boundary conditions and thus apply only on S.
Approximating yðn; g; sÞ and its spatial derivatives via global Lagrange interpolating polynomials, thesystem of partial differential and algebraic equations in Eqs. (2) and (3) reduce to the following system of P2differential algebraic equations:
dypðsÞds
¼ fp y1; . . . ; yP2ð Þ; p ¼ 1; . . . ; P1; ð5Þ
0 ¼ gp0 y1; . . . ; yP2ð Þ; p0 ¼ P1 þ 1; . . . ; P2; ð6Þ
with initial conditions from Eq. (4)
ypð0Þ ¼ y0p; p ¼ 1; . . . ; P1: ð7Þ
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 61
Here y1ðsÞ; . . . ; yP2ðsÞ are the flow quantities, physical grid coordinates, and shock velocity evaluated atnodal points on an ðN þ 1Þ � ðM þ 1Þ mesh. Solving for the yp0 ðsÞ, p0 ¼ P1 þ 1; . . . ; P2, as explicit functionsof the yp, p ¼ 1; . . . ; P1, i.e.
yp0 ðsÞ ¼ bgp0 y1; . . . ; yP1ð Þ; p0 ¼ P1 þ 1; . . . ; P2: ð8ÞEqs. (5) and (6) are converted into the following system of P1 ODEs:
dxpðsÞds
¼ qp x1; . . . ; xP1ð Þ; p ¼ 1; . . . ; P1; ð9Þ
where
qp x1; . . . ; xP1ð Þ � fp y1; . . . ; yP1 ; bgp0 y1; . . . ; yP1ð Þ� �; p ¼ 1; . . . ; P1; p0 ¼ P1 þ 1; . . . ; P2; ð10Þand
xpðsÞ ¼ ypðsÞ; p ¼ 1; . . . ; P1: ð11Þ
The accompanying initial conditions are
xpð0Þ ¼ x0p; p ¼ 1; . . . ; P1: ð12Þ
In compact vector notation, Eq. (9) is
dx
ds¼ qðxÞ; ð13Þ
with accompanying initial conditions
xð0Þ ¼ x0 ð14Þ
from Eq. (12).
2.2. Governing equations
The two-dimensional, axisymmetric Euler equations for a calorically perfect ideal gas are in dimen-
sionless form:
oqot
þ u oqor
þ w oqoz
þ q ouor
�þ ow
ozþ u
r
�¼ 0; ð15Þ
ouot
þ u ouor
þ w ouoz
þ 1qopor
¼ 0; ð16Þ
owot
þ u owor
þ w owoz
þ 1qopoz
¼ 0; ð17Þ
opot
þ u opor
þ w opoz
þ cp ouor
�þ ow
ozþ u
r
�¼ 0; ð18Þ
-
62 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
where q is density, p is pressure, u and w are the velocities in the radial and axial directions, respectively, r isthe radial coordinate, z is the axial coordinate, t is time, and c is the ratio of specific heats. The dimensionalform for pressure, p�, density, q�, and r� and z� components of velocity, u� and w�, respectively, are re-covered by the following equations:
p� ¼ pp�1; ð19Þ
q� ¼ qq�1; ð20Þ
u� ¼ uffiffiffiffiffiffiffiffiffiffiffiffiffiffiffip�1=q
�1
q; w� ¼ w
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffip�1=q
�1
q; ð21Þ
where dimensional quantities are denoted by a �, and freestream quantities are denoted by 1. The di-mensional space and time variables are
z� ¼ zL; r� ¼ rL; ð22Þ
t� ¼ tL=ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffip�1=q
�1
q; ð23Þ
where L is the length of the body. The freestream flow is at zero angle of attack so that the component offreestream velocity in the r direction, u1 ¼ 0.
Defining the entropy to be s, we have, for a calorically perfect ideal gas with zero freestream entropy,
s ¼ ln pqc
� �; ð24Þ
where the entropy is nondimensionalized by the the specific heat at constant volume, c�v,
s� ¼ sc�v: ð25Þ
To facilitate the solution to the Euler equations for time-varying geometry, Eqs. (15)–(18) are rewritten
in terms of a general body-fitted coordinate system, nðz; r; tÞ, gðz; r; tÞ and sðz; r; tÞ. Employing the chain ruleof differentiation
o
oz¼ on
ozo
onþ og
ozo
ogþ os
ozo
os;
o
or¼ on
oro
onþ og
oro
ogþ os
oro
os;
o
ot¼ on
oto
onþ og
oto
ogþ os
oto
os;
ð26Þ
and taking sðz; r; tÞ ¼ t, the nondimensional form of Eqs. (15)–(18) in generalized coordinates is
oqos
þ bu oqon
þ bw oqog
þ q onor
ouon
�þ on
ozowon
þ ogor
ouog
þ ogoz
owog
�þ qu
r¼ 0; ð27Þ
ouos
þ bu ouon
þ bw ouog
þ 1q
onor
opon
�þ og
oropog
�¼ 0; ð28Þ
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 63
owos
þ bu owon
þ bw owog
þ 1q
onoz
opon
�þ og
ozopog
�¼ 0; ð29Þ
opos
þ bu opon
þ bw opog
þ cp onor
ouon
�þ on
ozowon
þ ogor
ouog
þ ogoz
owog
�þ cpu
r¼ 0; ð30Þ
where the contravariant velocity components bu and bw arebu ¼ on
otþ u on
orþ w on
oz; ð31Þ
bw ¼ ogot
þ u ogor
þ w ogoz
: ð32Þ
The following standard relations between the metrics and inverse metrics will be necessary
onoz
¼ 1Jorog
;ogoz
¼ � 1Joron
;
onor
¼ � 1Jozog
;ogor
¼ 1Jozon
;
onot
¼oros
ozog � orog ozos
� �J
;ogot
¼oron
ozos � oros ozon
� �J
;
J ¼ orog
ozon
� oron
ozog
;
ð33Þ
where J is the determinant of the metric Jacobian matrix.
−0.4 −0.2 0.2 0.4 0.6 0.8 1
0.6
0.8
1
1.2
0.2
0.4
z
r
η
ξ Shock
v∞
h(ξ,τ)
Body (R=Z b)
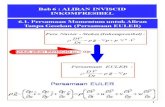
Fig. 1. Schematic of shock-fitted high Mach number flow over an axisymmetric blunt body including computational ðn; gÞ andphysical ðr; zÞ coordinates.
-
64 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
2.3. Computational and physical coordinates
The physical domain of the blunt body problem, Fig. 1, is mapped to the computational domain,n 2 ½0; 1�, g 2 ½0; 1�, in such a way that the body surface lies along the computational boundary n; 0ð Þ, theshock lies along the boundary ðn; 1Þ, the symmetry axis is a third boundary at ð0; gÞ, and the fourthboundary at ð1; gÞ is a supersonic outflow. The transformation between the physical coordinates ðr; zÞ andcomputational coordinates n; gð Þ is taken to be
r n; g; sð Þ ¼ RðnÞ þg dZðnÞ
dn h n; sð ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffidRðnÞdn
� �2þ dZðnÞ
dn
� �2r ; ð34Þ
z n; g; sð Þ ¼ ZðnÞ �g dRðnÞ
dn h n; sð ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffidRðnÞdn
� �2þ dZðnÞ
dn
� �2r ; ð35Þ
where the nonlinear function hðn; sÞ must be specified to completely determine the mapping, and RðnÞ andZðnÞ are known functions. After manipulation, the transformations in Eqs. (34) and (35) yield the followingidentity:
h n; sð Þ ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiz n; 1; sð Þ � z n; 0; sð Þð Þ2 þ r n; 1; sð Þ � r n; 0; sð Þð Þ2
q; ð36Þ
from which it is seen that the function hðn; sÞ is the distance in r–z space between the body surface, g ¼ 0,and the shock, g ¼ 1, along lines of constant n. The function hðn; sÞ is subsequently referred to as the shockdistance function. We see that Eqs. (34) and (35) form an implicit algebraic equation for the coordinate
transformation. It is apparent from Eqs. (34) and (35) that the functions RðnÞ and ZðnÞ parameterize theblunt body surface, g ¼ 0, i.e.
r n; 0; sð Þ ¼ RðnÞ;z n; 0; sð Þ ¼ ZðnÞ;
ð37Þ
and that the body surface is not a function of time. The transformations in Eqs. (34) and (35) have been
constructed so that lines of constant n are normal to the body surface and have no curvature in r–z space.The time evolution equations for the physical grid rðn; g; sÞ, and zðn; g; sÞ can be found by differentiating
Eqs. (34) and (35) with respect to time as follows:
o
osr n; g; sð Þ ¼
g dZðnÞdn v n; sð Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
dRðnÞdn
� �2þ dZ nð Þ
dn
� �2r ; ð38Þ
o
osz n; g; sð Þ ¼ �
g dRðnÞdn v n; sð Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
dRðnÞdn
� �2þ dZ nð Þ
dn
� �2r ; ð39Þwhere the shock velocity function v n; sð Þ is
v n; sð Þ ¼ oos
h n; sð Þ: ð40Þ
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 65
2.4. Boundary conditions
The kinematic boundary condition of no mass flux at the body surface requires that the velocity com-
ponent normal to the body surface, vBNðn; sÞ, be equal to zero, i.e.
vBN n; sð Þ ¼ bw n; 0; sð Þ ¼ 0: ð41ÞIn order to formulate a numerical boundary condition at the body for q, u, w, and p, Eqs. (27)–(30) are
written in the following form:
oz
osþ A oz
onþ B oz
ogþ s ¼ 0; ð42Þ
where
z ¼
quwp
26643775; s ¼
qu=r0
0
cpu=r
26643775; ð43Þ
A ¼
bu q onor q
onoz 0
0 bu 0 1q onor0 0 bu 1q onoz0 cp on
or cponoz bu
2666664
3777775; B ¼bw q og
or qogoz 0
0 bw 0 1q ogor0 0 bw 1q ogoz0 cp og
or cpogoz bw
2666664
3777775: ð44Þ
The flux Jacobian matrix B is then decomposed as
B ¼ P�1KgP; ð45Þ
where the square matrix P contains the left eigenvectors of B in its rows; the diagonal matrix Kg containsthe eigenvalues of B in its diagonal; and P�1 is the inverse of P. Substituting Eq. (45) into Eq. (42) and
premultiplying by P yields the following characteristic formulation [27,28] of the governing equations:
Poz
osþ PA oz
onþ KgP
oz
ogþ Ps ¼ 0: ð46Þ
The diagonal eigenvalue matrix Kg and the left eigenvector matrix P are
Kg ¼
bw 0 0 00 bw 0 00 0 bw � c ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiog
oz
� �2 þ ogor
� �2q0
0 0 0 bw þ c ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogoz
� �2 þ ogor
� �2q
26666664
37777775; ð47Þ
-
66 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
P ¼
0 �ogozogor
ogozð Þ
2þ og
orð Þ2
ogozð Þ
2
ogozð Þ
2þ og
orð Þ2 0
1 0 0 � 1c20 � qc
ogoz
2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogozð Þ
2þ og
orð Þ2
q � qcogor2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogozð Þ
2þ og
orð Þ2
q 12
0qcog
oz
2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogozð Þ
2þ og
orð Þ2
q qcogor2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogozð Þ
2þ og
orð Þ2
q 12
266666666664
377777777775; ð48Þ
where c ¼ffiffiffiffiffiffiffiffiffifficp=q
pis the dimensionless acoustic speed. Since bw is everywhere negative and since
kbwk < kc ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðog=ozÞ2 þ ðog=orÞ2q k at g ¼ 0, only the first three of the equations in Eq. (46) can be used informulating numerical boundary conditions since they are associated with negative eigenvalues, Kg. Thefourth equation in Eq. (46) is associated with a positive eigenvalue and thus describes information prop-
agation from inside the body which must therefore be discarded as nonphysical; in its place the physical
boundary condition, Eq. (41), is employed. Making use of the fact that bwðn; 0; sÞ ¼ obwos jðn;0;sÞ ¼ 0, the three
differential equations from Eq. (46) to be solved at the body surface, g ¼ 0, are cast in the following form,which is consistent with Eq. (2)
oqos
�¼ 1
c2opos
� bu oqon
�� 1c2
opon
�
n;0;sð Þ
; ð49Þ
o
osvBT n; sð Þ ¼
bu ogor
owon �
ogoz
ouon
� �þ 1q
ogor
onoz �
ogoz
onor
� �opon
� �ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogoz
� �2 þ ogor
� �2q
n;0;sð Þ
; ð50Þ
opos
264 ¼ qcbu ogor ouon þ ogoz owon� �
þ c ogor
onor þ
ogoz
onoz
� �oponffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ogoz
� �2 þ ogor
� �2q � qc2 onor ouon�
þ onoz
owon
þ ogor
ouog
þ ogoz
owog
�
þ c
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogoz
� �2þ og
or
� �2sopog
� bu opon
� qc2ur
375
n;0;sð Þ
: ð51Þ
The velocity components uðn; 0; sÞ and wðn; 0; sÞ are specified as following functions of vBT:
u n; 0; sð Þ ¼oron vBT n; sð Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffioron
� �2þ oz
on
� �2r
n;0;sð Þ
; w n; 0; sð Þ ¼ozon vBT n; sð Þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffioron
� �2þ oz
on
� �2r
n;0;sð Þ
: ð52Þ
At the shock boundary, the Rankine–Hugoniot relations are solved along with a compatibility equation.
Specifically, the Rankine–Hugoniot relations are
v1 � eSTj n;1;sð Þ ¼ v � eSTj n;1;sð Þ; ð53Þ
dS n; sð Þ ¼c� 1cþ 1 d1 n; sð Þ þ
2cp1cþ 1ð Þq1d1 n; sð Þ
; ð54Þ
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 67
p n; 1; sð Þ ¼ 2q1cþ 1 d
21 n; sð Þ �
c� 1cþ 1 p1; ð55Þ
q n; 1; sð Þ ¼ d1 n; sð ÞdS n; sð Þ
q1; ð56Þ
where dS and d1 are the component of fluid velocity normal to the shock in the shock-attached referenceframe on the downstream and freestream sides of the shock, respectively, i.e.
dS n; sð Þ ¼v � eSNj n;1;sð Þ � vSN n; sð Þ;v � eSNj n;1;sð Þ � eg � eSN
� �v n; sð Þ;
�ð57Þ
d1 n; sð Þ ¼ v1 � eSNj n;1;sð Þ � eg � eSN� �
v n; sð Þ; ð58Þ
and vðn; g; sÞ is the nondimensional velocity vector. The nondimensional freestream velocity vector v1 is
v1 ¼ffiffiffiffiffiffiffifficp1q1
rM1ez: ð59Þ
In Eqs. (53)–(57), eST is a unit vector in the direction tangent to the shock wave, eSN is a unit vector in thedirection normal to the shock wave, and vSNðn; sÞ and vðn; sÞ are the velocities of the shock in the eSN and egdirections, respectively. Quantities denoted with a subscript of 1 are freestream quantities, and those withno subscripts are post-shock quantities. The unit vectors eST and eSN are in terms of the inverse metrics
eST ¼� og
oz er þogor ezffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ogoz
� �2 þ ogor
� �2q
n;1;sð Þ
; ð60Þ
eSN ¼ogor er þ
ogoz ezffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ogoz
� �2 þ ogor
� �2q
n;1;sð Þ
: ð61Þ
In order to solve the Rankine–Hugoniot equations, an expression for the shock velocity, vðn; sÞ, isneeded. Differentiating Eqs. (54) and (55) with respect to time yields
o
osdS n; sð Þ ¼ A1 n; sð Þ
o
osd1 n; sð Þ; ð62Þ
o
osp n; 1; sð Þ ¼ A2 n; sð Þ
o
osd1 n; sð Þ; ð63Þ
where
A1 n; sð Þ ¼c� 1cþ 1�
2c
cþ 1ð Þd21 n; sð Þ; A2 n; sð Þ ¼
4d1 n; sð Þcþ 1 : ð64Þ
The terms ðo=osÞdSðn; sÞ and ðo=osÞd1ðn; sÞ in Eqs. (62) and (63) are found by differentiating Eqs. (57) and(58), respectively, to yield the following:
-
68 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
o
osdS n; sð Þ ¼
ov
os� eSN
�þ v � oeSN
os� eg � eSN� � ov
os� veg �
oeSN
os
n;1;sð Þ
; ð65Þ
o
osd1 n; sð Þ ¼
ov1
os� eSN
�þ v1 �
oeSN
os� eg � eSN� � ov
os� veg �
oeSN
os
n;1;sð Þ
: ð66Þ
Multiplying Eq. (62) by qc and adding it to Eq. (63), and replacing the term ðo=osÞdSðn; sÞ by Eq. (65)and the term ðo=osÞd1ðn; sÞ by (66), we arrive at the following equation for the shock accelerationðo=osÞvðn; sÞ,
o
osv n; sð Þ ¼
A2 þ qcA1ð Þ v1 � veg� �
� qc v� veg� ��
� oeSNos � qc ovos � eSN �
opos
eg � eSN� �
A2 þ qc A1 � 1ð Þ½ �
n;1;sð Þ
: ð67Þ
The terms op=os and qcðov=osÞ � eSN must be specified by a compatibility equation which is the charac-teristic equation associated with the wave propagating from the body to the shock along the normal di-
rection. This compatibility equation is in the same form as the fourth compatibility equation in Eq. (46)
only written in shock coordinates instead of the body coordinate system ðn; g; sÞ. After some simplification,the following shock acceleration equation is obtained:
o
osv n; sð Þ ¼
A2 þ qcA1ð Þ v1 � veg� �
� oeSNos � qc v� veg
� �� oeSN
os þ A3eg � eSN� �
A2 þ qc A1 � 1ð Þ½ �
n;1;sð Þ
; ð68Þ
where
A3 ¼ bu opon
þ bw opog
þ cp onoz
owon
�þ og
ozowog
þ onor
ouon
þ ogor
ouog
�
þ qcozonffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ozon
� �2þ or
on
� �2r bu ouron�2664 þ bw ouogþ 1q onor opon
�þ og
oropog
��
�oronffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ozon
� �2þ or
on
� �2r bu owon�
þ bw owog
þ 1q
onoz
opon
�þ og
ozopog
��3775þ cpur : ð69Þ
The time derivative of the normal unit vector, oeSN=os, is found by taking the time derivative of Eq. (61)with the metrics from Eq. (33) in place of the inverse metrics to yield
oeSN
os¼
oron
o2zos on � ozon o
2ros on
� �ozon ez þ oron er
� �ozon
� �2þ or
on
� �2� �3=2 : ð70ÞSince there is a geometric singularity in Eq. (69) at r ¼ 0, the following alternate expression for vð0; sÞ isemployed
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 69
o
onv 0; sð Þ ¼ 0: ð71Þ
We impose the following appropriate boundary conditions on the centerline, n ¼ 0, in computationalcoordinates
owon
0;g;sð Þ
¼ 0; ð72Þ
opon
0;g;sð Þ
¼ 0; ð73Þ
u 0; g; sð Þ ¼ 0; ð74Þ
q 0; g; sð Þ ¼ q 0; 1; sð Þ p 0; g; sð Þp 0; 1; sð Þ
� �1=c: ð75Þ
The boundary condition in Eq. (75) comes from casting the energy equation, Eq. (18), in terms of the
nondimensional entropy, s,
osot
þ u osor
þ w osoz
¼ 0: ð76Þ
Enforcing steady state, os=ot ¼ 0, and zero velocity in the r direction, uð0; g; sÞ ¼ 0, Eq. (76) reduces toosoz jð0;g;sÞ ¼ 0. Thus sð0; g; sÞ is constant and equal to sð0; 1; sÞ, the nondimensional value of the entropydownstream of the shock. Substituting sð0; g; sÞ ¼ lnðpð0; 1; sÞ=qð0; 1; sÞcÞ into the equation for entropy, Eq.(24), and simplifying gives the boundary condition in Eq. (75). We note that the enforcement of steady statefor entropy is artificial and potentially precludes some classes of unsteady behavior.
At the supersonic outflow boundary, n ¼ 1, no physical boundary conditions are required as all wavesare exiting the domain. Here the governing equations are solved in exactly the same manner as in the
interior.
2.5. Summary of governing equations and boundary conditions
The governing equations and boundary conditions can be written in terms of the system of time-de-pendent partial differential and algebraic equations in Eqs. (2)–(4) in the two space dimensions, n and g,where
y n; g; sð Þ ¼
q n; g; sð Þu n; g; sð Þw n; g; sð Þp n; g; sð Þr n; g; sð Þz n; g; sð ÞvBT n; sð Þq n; 0; sð Þp n; 0; sð Þv n; sð Þ
2666666666666664
3777777777777775; ð77Þ
-
70 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
f ¼
�bu oqon
� bw oqog
� q onor
ouon
þ onoz
owon
þ ogor
ouog
þ ogoz
owog
� �� qu
rEq:ð27Þ
�bu ouon
� bw ouog
� 1q
onor
opon
þ ogor
opog
� �Eq:ð28Þ
�bu owon
� bw owog
� 1q
onoz
opon
þ ogoz
opog
� �Eq:ð29Þ
�bu opon
� bw opog
� cp onor
ouon
þ onoz
owon
þ ogor
ouog
þ ogoz
owog
� �� cpu
rEq:ð30Þ
goZ nð Þon
v n; sð ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffioR nð Þon
� �2þ oZ nð Þ
on
� �2s Eq:ð38Þ
�goRðnÞon
v n; sð ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffioR nð Þon
� �2þ
oZ nð Þon
� �2s Eq:ð39Þ
�bu og
orowon
� ogoz
ouon
� �þ 1q
ogor
onoz
� ogoz
onor
� �opon
� ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogoz
� �2þ
ogor
� �2s
n;0;sð Þ
Eq:ð50Þ
� 1c2opos
þ bu oqon
� 1c2
opon
� ��
n;0;sð Þ
Eq:ð49Þ
�qcbu og
orouon
þ ogoz
owon
� �þ c og
oronor
þ ogoz
onoz
� �oponffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ogoz
� �2þ og
or
� �2s266664
�qc2 onor
ouon
þ onoz
owon
þ ogor
ouog
þ ogoz
owog
� �
þc
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogoz
� �2þ og
or
� �2sopog
� bu opon
� qc2ur
#
n;0;sð Þ
Eq:ð51Þ
A2 þ qcA1ð Þ v1 � veg� �
� oeSNos
� qc v� veg� �
� oeSNos
þ A3eg � eSN� �
A2 þ qc A1 � 1ð Þ½ �
264375
n;1;sð Þ
Eq:ð68Þ
26666666666666666666666666666666666666666666666666666666666666666666666666666666666666666664
37777777777777777777777777777777777777777777777777777777777777777777777777777777777777777775
; ð78Þ
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 71
g ¼
u�vBT oronffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
oron
� �2þ oz
on
� �2s266664
377775
n;0;sð Þ
w�vBT ozonffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
oron
� �2þ oz
on
� �2s266664
377775
n;0;sð Þ
9>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>;
Eq:ð52Þ
q n; 1; sð Þ � d1 n; sð ÞdS n; sð Þ
Eq:ð56Þ
v1 � eST � v � eST½ �j n;1;sð Þ Eq:ð53Þ
dS n; sð Þ �c� 1cþ 1 d1 n; sð Þ þ
2cp1cþ 1ð Þq1d1 n; sð Þ
Eq:ð54Þ
p n; 1; sð Þ � 2q1cþ 1 d
21 n; sð Þ �
c� 1cþ 1 p1 Eq:ð55Þ
q 0; g; sð Þ � q 0; 1; sð Þ p 0; g; sð Þp 0; 1; sð Þ
� �1=cEq:ð75Þ
u 0; g; sð Þ Eq:ð74Þowon
0;g;sð Þ
Eq:ð72Þ
opon
0;g;sð Þ
Eq:ð73Þ
ovon
0;sð Þ
Eq:ð71Þ
266666666666666666666666666666666666666666666666666664
377777777777777777777777777777777777777777777777777775
: ð79Þ
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
ξ
η
Body
Outflow
Shock
Centerline
Fig. 2. Gauss–Lobatto Chebyshev computational grid for the shock-fitted blunt body.
-
72 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
In Eqs. (77)–(79) yðn; g; sÞ : R3 ! R10 and f : R3 ! R10 while g : R3 ! R11. The functions yðn; g; sÞ and fcontain six components which are time-dependent functions over the domain X with the remaining fourcomponents time-dependent functions defined for on S only. The equation ðoy=osÞ þ f ¼ 0 represents 10partial differential equations with 10 unknowns and g ¼ 0 represents appropriate boundary conditions.
2.6. Numerical solution technique
In order to convert the system of partial differential and algebraic equations to a system of ODEs, it is
necessary to approximate the spatial derivatives oy=on and oy=og at grid points ðni; gjÞ, i ¼ 0; . . . ;N ,j ¼ 0; . . . ;M . We choose to specify the grid in the computational domain, Fig. 2, according to the followingGauss–Lobatto Chebyshev distribution:
ni ¼1
2
h1:� cos p
Ni
� �i; i ¼ 0; . . . ;N ;
gj ¼1
2
h1:� cos p
Mj
� �i; j ¼ 0; . . . ;M :
ð80Þ
This choice of nodes is not unique and is made because global Lagrange polynomial approximations of
general nonperiodic functions defined on this grid were found in [29] to yield a more uniform and overall
lower error than a uniform grid. The functions yðn; g; sÞ are approximated in terms of a double Lagrangeglobal interpolating polynomial defined on the mesh nn, n ¼ 0; . . . ;N , gm, m ¼ 0; . . . ;M , i.e.
yðn; g; sÞ �XNn¼0
XMm¼0
yðnn; gm; sÞLðNÞn ðnÞLðMÞm ðgÞ: ð81Þ
The Lagrange interpolating polynomials are
LðNÞn ðnÞ ¼QN
l¼0; l 6¼n n� nlð ÞQNl¼0; l 6¼n nn � nlð Þ
; n ¼ 0; . . . ;N ;
LðMÞm ðgÞ ¼QM
l¼0; l 6¼m g� glð ÞQMl¼0; l 6¼m gm � glð Þ
; m ¼ 0; . . . ;M :
ð82Þ
It is easily shown that the Lagrange interpolating polynomials, LðNÞn ðnÞ and LðMÞm ðgÞ, have the values of unityat n ¼ nn and g ¼ gm and zero at the other collocation points, i.e.
LðNÞn ðniÞ ¼ dni ¼0 if n 6¼ i;1 if n ¼ i;
�LðMÞm ðgjÞ ¼ dmj ¼
0 if m 6¼ j;1 if m ¼ j:
�ð83Þ
Derivatives of yðn; g; s; bÞ are evaluated by differentiating Eq. (81). Evaluating these derivatives on the grid,ðni; gjÞ, chosen to be the same grid as that used to define the interpolating polynomial, i.e. ðni; gjÞ � ðnn; gmÞ,and making use of Eq. (83) yields
oy
on
ni ;gjð Þ
�XNn¼0
yðnn; gj; sÞdLndn
ðniÞ;
oy
og
ni ;gjð Þ
�XMm¼0
yðni; gm; sÞdLmdg
ðgjÞ:
ð84Þ
The terms ðdLn=dnÞðniÞ and ðdLm=dgÞðgjÞ in Eq. (84) are evaluated efficiently for an arbitrary grid using analgorithm developed by Fornberg [25]. The operation count for approximating the derivatives via Eq. (84)
on an N �M grid is ðNMÞ2 operations for direct matrix multiplication used here. The points which both
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 73
define the Lagrange interpolating polynomials and at which derivatives are evaluated are chosen according
to Eq. (80). The metrics o2z=ðos onÞ and o2r=ðos onÞ in Eq. (70) are specified by differentiating Eq. (84) withrespect to time, i.e.
o2zðni; gj; sÞos on
¼XNn¼0
o
oszðnn; gj; sÞ
dLndn
ðniÞ;
o2rðni; gj; sÞos on
¼XNn¼0
o
osrðnn; gj; sÞ
dLndn
ðniÞ:
ð85Þ
After spatial discretization of Eqs. (77)–(79) on an ðN þ 1Þ � ðM þ 1Þ grid, the equations become a systemof differential algebraic equations of the form in Eqs. (5) and (6) consisting of P2 ¼ 6ðNM þ N þMÞ þ 5total equations and equal number of unknowns. The system is composed of P1 ¼ 6NM þ 2M ODEs and6N þ 4M þ 5 algebraic equations, where the primary variables, ypðsÞ, p ¼ 1; . . . ; P1, taken to be those whosetime derivative explicitly appears in Eq. (5) are
yp sð Þ ¼
q ni; gj; s� �
u ni; gj; s� �
w ni; gj; s� �
p ni; gj; s� �
9>>>>>=>>>>>;i ¼ 1; . . . ;N ; j ¼ 1; . . . ;M � 1;
r ni; gj; s� �z ni; gj; s� �) i ¼ 0; . . . ;N ; j ¼ 1; . . . ;M ;vBT ni; sð Þ
qðni; 0; sÞ
pðni; 0; sÞ
vðni; sÞ
9>>>>>=>>>>>;i ¼ 1; . . . ;N ;
26666666666666666666666664
37777777777777777777777775
; p ¼ 1; . . . ; P1; ð86Þ
and the secondary variables yp0 ðsÞ, p0 ¼ P1 þ 1; . . . ; P2; are
yp0 ðsÞ ¼
u ni; 0; sð Þw ni; 0; sð Þq ni; 1; sð Þu ni; 1; sð Þw ni; 1; sð Þp ni; 1; sð Þ
9>>>>>>>>>>=>>>>>>>>>>;i ¼ 1; . . . ;N ;
qð0; gj; sÞuð0; gj; sÞwð0; gj; sÞpð0; gj; sÞ
9>>>>=>>>>; j ¼ 0; . . . ;M ;v 0; sð Þ
26666666666666666666666664
37777777777777777777777775
; p0 ¼ P1 þ 1; . . . ; P2: ð87Þ
-
74 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
The functions fpðy1; . . . ; yP2Þ, p ¼ 1; . . . ; P1, are
fp ¼
�bu oqon
� bw oqog
�q onor
ouon
þonoz
owon
þogor
ouog
þogoz
owog
� ��qu
r
�
ni ;gj ;sð Þ
�bu ouon
� bw ouog
� 1q
onor
opon
þogor
opog
� ��
ni ;gj ;sð Þ
�buowon
� bw owog
� 1q
onoz
opon
þogoz
opog
� ��
ni ;gj;sð Þ
�buopon
� bw opog
� cp onor
ouon
þonoz
owon
þogor
ouog
þogoz
owog
� �� cpu
r
�
ni ;gj;sð Þ
9>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>;
i¼ 1; . . . ;N ; j¼ 1; . . . ;M�1;
gdZðnÞdn
v n;sð ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffidRðnÞdn
� �2þ dZðnÞ
dn
� �2s
ni ;gj ;sð Þ
�gdRðnÞdn
v n;sð ÞffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffidRðnÞdn
� �2þ dZðnÞ
dn
� �2s
ni ;gj ;sð Þ
9>>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>>;
i¼ 0; . . . ;N ; j¼ 1; . . . ;M ;
�bu og
orowon
�ogoz
ouon
� �þ 1q
ogor
onoz
�ogoz
onor
� �opon
� ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogoz
� �2þ
ogor
� �2s
ni ;0;sð Þ
� 1c2
opos
þbu oqon
� 1c2
opon
� ��
ni ;0;sð Þ
�qcbu og
orouon
þogoz
owon
� �þc og
oronor
þogoz
onoz
� �oponffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ogoz
� �2þ og
or
� �2s266664
�qc2 onor
ouon
þonoz
owon
þogor
ouog
þogoz
owog
� �
þc
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiogoz
� �2þ og
or
� �2sopog
�bu opon
�qc2ur
#
ni ;0;sð Þ
�A2þqcA1ð Þ v1� veg
� ��oeSNos
�qc v� veg� �
�oeSNos
þA3eg � eN� �
A2þqc A1�1ð Þ½ �
264375
ni ;1;sð Þ
9>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>;
i¼ 1; . . . ;N ;
26666666666666666666666666666666666666666666666666666666666666666666666666666666666666666664
37777777777777777777777777777777777777777777777777777777777777777777777777777777777777777775ð88Þ
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 75
and the functions gp0 ðy1; . . . ; yP2Þ, p0 ¼ P1 þ 1; . . . ; P2, are
gp0 ¼
u�vBT
oronffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
oron
� �2þ
ozon
� �2s266664
377775
ni;0;sð Þ
w�vBT
ozonffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
oron
� �2þ oz
on
� �2s266664
377775
ni;0;sð Þ
q ni; 1; sð Þ �d1 ni; sð ÞdS ni; sð Þ
q1
v1 � eST � v � eST½ �j ni ;1;sð Þ
dS ni; sð Þ �c� 1cþ 1 d1 ni; sð Þ þ
2cp1cþ 1ð Þq1d1 ni; sð Þ
p ni; 1; sð Þ �2q1cþ 1 d
21 ni; sð Þ �
c� 1cþ 1 p1
9>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>;
i ¼ 1; . . . ;N ;
q 0; gj; s� �
� q 0; 1; sð Þp 0; gj; s� �p 0; 1; sð Þ
� �1=cu 0; gj; s� �owon
0;gj;sð Þ
opon
0;gj;sð Þ
9>>>>>>>>>>>>>=>>>>>>>>>>>>>;j ¼ 0; . . . ;M ;
o
onv 0; sð Þ
26666666666666666666666666666666666666666666666666666666666664
37777777777777777777777777777777777777777777777777777777777775
: ð89Þ
There are no equations for the grid points on the body since these are fixed in time, nor is there an equation
for the tangential velocity on the body at the centerline since this quantity is redundant, the velocity
components, uð0; gj; sÞ, wð0; gj; sÞ, already being specified by Eqs. (72) and (74).Finally, the secondary variables yp0 , p0 ¼ P1 þ 1; . . . ; P2, in Eq. (89) are solved for explicitly in terms
of the primary variables yp, p ¼ 1; . . . ; P1. Making use of Eq. (84) yields the following expression forwð0; gj; sÞ,
w 0; gj; s� �
¼PN
n¼1 wðnn; gj; sÞ dLndn ð0ÞdL0dn ð0Þ
; ð90Þ
similar expressions are found for pð0; gj; sÞ, and vð0; sÞ. Eqs. (53) and (54) are reformulated into the fol-lowing two equations for the quantities uðni; 1; sÞ and wðni; 1; sÞ, i ¼ 1; . . . ;N ,
-
76 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
u ni; 1; sð Þ ¼ozon
oron
ffiffiffic
pM1
ozon
� �2þ or
on
� �2264 þ ozon dþ eg � eSN� �v� ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ozon
� �2þ or
on
� �2r3775
ni ;1;sð Þ
;
w ni; 1; sð Þ ¼ozon
� �2 ffiffiffic
pM1
ozon
� �2þ or
on
� �2264 � oron dþ eg � eSN� �v� ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ozon
� �2þ or
on
� �2r3775
ni;1;sð Þ
:
ð91Þ
Once the quantities wð0; gj; sÞ, pð0; gj; sÞ, zð0; gj; sÞ, and vð0; sÞ are found from Eq. (90) and uðni; 1; sÞ andwðni; 1; sÞ are found from Eq. (91), the algebraic equations, gp0 ðy1; . . . ; yP2Þ, Eq. (89), are written in the formof Eq. (8) where
bgp0 ¼
vBToronffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
oron
� �2þ oz
on
� �2s266664
377775
ni ;0;sð Þ
vBTozonffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
oron
� �2þ oz
on
� �2s266664
377775
ni ;0;sð Þ
d1 ni; sð ÞdS ni; sð Þ
q1
ozon
oron
ffiffiffic
pM1
ozon
� �2þ or
on
� �2 þozon
dS þ eg � eSN� �
v� ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiozon
� �2þ or
on
� �2s266664
377775
ni ;1;sð Þ
ozon
� �2 ffiffiffic
pM1
ozon
� �2þ
oron
� �2 �oron
dS þ eg � eSN� �
v� ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiozon
� �2þ
oron
� �2s266664
377775
ni ;1;sð Þ
2q1cþ 1 d
21 ni; sð Þ þ
c� 1cþ 1 p1
9>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>;
i ¼ 1; . . . ;N ;
q 0; 1; sð Þ
PNn¼1 pðnn; gj; sÞ
dLndn
ð0Þ
p 0; 1; sð Þ dL0dn
ð0Þ
0BB@1CCA
1=c26643775
0;gj ;sð Þ0PN
n¼1 wðnn; gj; sÞdLndn
ð0Þ
dL0dn
ð0ÞXNn¼1
pðnn; gj; sÞdLndn
ð0Þ
dL0dn
ð0Þ
9>>>>>>>>>>>>>>>>>>>>>=>>>>>>>>>>>>>>>>>>>>>;
j ¼ 0; . . . ;M ;
PNn¼1
vðnn; sÞdLndn
ð0ÞdL0dn
ð0Þ
2666666666666666666666666666666666666666666666666666666666666666666666666666664
3777777777777777777777777777777777777777777777777777777777777777777777777777775
; ð92Þ
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 77
and dSðni; sÞ ¼ ððc� 1Þ=ðcþ 1ÞÞd1ðni; sÞ � 2cp1=ððcþ 1Þq1d1ðni; sÞÞ.The initial conditions for the shock distance, hðni; sÞ, are taken to be constant, i.e., hðni; sÞ ¼
hð0; sÞ ¼ 0:25, i ¼ 1; . . . ;N , which is sufficient to set initial conditions for the remainder of the physical gridcoordinates, rðni; gj; sÞ, zðni; gj; sÞ, i ¼ 0; . . . ;N , j ¼ 0; . . . ;M , by making use of Eqs. (34) and (35). Theshock velocity, vðni; sÞ, i ¼ 0; . . . ;N , is initially set to zero. The initial values for the variables, qðni; gj; sÞ,uðni; gj; sÞ, wðni; gj; sÞ, pðni; gj; sÞ, i ¼ 1; . . . ;N , j ¼ 1; . . . ;M , qðni; 0; sÞ, uðni; 0; sÞ, and pðni; 0; sÞ,i ¼ 1; . . . ;N , are set equal to the value behind the shock at ðg ¼ 1Þ for the corresponding n coordinate line,e.g. qðni; gj; 0Þ ¼ qðni; 1; 0Þ. The initial values for uðni; 0; sÞ, i ¼ 1; . . . ;N , are chosen so that the boundarycondition at g ¼ 0, Eq. (41) is satisfied exactly, and the initial values for qð0; gj; sÞ, uð0; gj; sÞ, wð0; gj; sÞ,pð0; gj; sÞ, j ¼ 0; . . . ;M , are chosen so that the boundary conditions at n ¼ 0, Eqs. (72)–(75) are satisfiedexactly. The initial values for the variables vBTðni; sÞ, i ¼ 1; . . . ;N , are prescribed once the values forrðni; 0; sÞ, zðni; 0; sÞ, uðni; 0; sÞ and wðni; 0; sÞ have been specified.
Solutions have been obtained for the system of ODEs, Eqs. (9), with the standard ODE solver LSODA,
[30,31], which automatically adjusts the time step to achieve a specified level of accuracy. It also auto-
matically switches between an explicit method and implicit method depending on the stiffness of the
problem. A typical steady state calculation on a 17� 9 grid took 106 s CPU time on a single 800 MHzprocessor with 512 MB of RAM. For the steady state problems, the criteria for stopping the integration is
when the L1½X� error in qðn; g; s ! 1Þ does not change appreciably. Finally, since LSODA automaticallyswitches between an explicit method and implicit method depending, it may be of interest to note that earlyin the calculation, less than 10% of LSODA�s time steps were implicit whereas about 50% of the time stepswere run in implicit mode as the calculations neared steady state. Apparently as the level of error ap-
proached the level of the discretization error, the problem became increasingly stiff causing LSODA to
switch to implicit mode.
2.7. Pseudospectral flow solver verification and validation
2.7.1. Taylor–Maccoll solution
The solution to supersonic flow over a cone, also known as the Taylor–Maccoll solution [32], will be
used to verify the code described in the previous section. We first use a highly accurate ODE solver to
calculate the Taylor–Maccoll solution, which we will subsequently refer to as the exact solution. The only
modification to the blunt body problem formulation to generate numerical approximations to the Taylor–
Maccoll flow is to replace the centerline boundary condition at n ¼ 0 with a Dirichlet boundary conditioncontaining the values of q, u, w, p, r, and z taken from the exact solution. A schematic of a 40� cone in-cluding the physical and computational coordinates is shown in Fig. 3 for a 5� 5 grid for M1 ¼ 3:5,q1 ¼ p1 ¼ 1. A value of r0 ¼ 0:1 was chosen for the results presented in this section. The initial conditionsfor q, u, w, p, r, and z are taken from the exact solution, and a sinusoidal distribution is chosen for the initialshock velocity, i.e. vðn; 0Þ ¼ 0:1 sinð2pnÞ. In Fig. 4, we show the time history of the L1½X� error in qðn; gÞover the domain, X, for the pseudospectral prediction measured against the exact solution for a M1 ¼ 3:5flow over a 40� cone solved on a 5� 17 grid. The figure demonstrates a rapid relaxation to the exactsolution.
A grid convergence test for the pseudospectral prediction of the Taylor–Maccoll flow is conducted by
refining the grid in the g-direction for a fixed number of 5 nodes in the n-direction. The accuracy of themethod is unaffected by grid refinement in the n-direction since all derivatives are zero in that direction. Aswe can see from Fig. 5, there is a rapid decrease in the error until about 10�12 when the error flattens
probably due to roundoff error. Note the spectral nature of the grid convergence, that is the slope of the
error curve continues to steepen with increasing number of nodes, at least until the roundoff limit is
reached, and does not reach a constant value for the slope as would be the case for a method with a fixed
order of accuracy.
-
Fig. 3. Schematic of the physical ðr; zÞ and computational ðn; gÞ grids for the Taylor–Maccoll problem.
2 4 6 8 1010
15
1010
105
100
τ
L ∞[Ω
] err
or in
ρ
Fig. 4. Single 5� 17 grid L1½X� residual error in qðn; gÞ measured against Taylor–Maccoll similarity solution as a function of time, s,for a 40� cone at M1 ¼ 3:5.
78 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
2.7.2. Steady state blunt body results
The following functions have been chosen to parameterize the blunt body surface
RðnÞ ¼ n; ð93Þ
ZðnÞ ¼ n1=b; ð94Þ
where the domain for the geometric parameter b is restricted to b 2 ð0; 1Þ. Eliminating the parameter n, wesee that the body surface is described by R ¼ Zb. For b ¼ 0:5, M1 ¼ 3:5, q1 ¼ p1 ¼ 1, contour plots ofMach number and pressure are shown in Figs. 6 and 7. The sonic line, M ¼ 1, is predicted in Fig. 6 as wellas the fact that the outflow velocity is indeed supersonic as required in the derivation of the outflow
-
100
101
102
103
1015
1010
105
100
ηnumber of nodes in direction
L ∞[Ω
] err
or in
ρ
Fig. 5. L1½X� error in qðn; gÞ measured against a Taylor–Maccoll similarity solution for a 40� cone in M1 ¼ 3:5 flow as grid is refinedin the g direction.
0.2 0 0.2 0.4 0.6 0.80
0.5
1
1.5
z
r
0.2
0.4
0.6
0.8
1
1.2
1.4
1.4
1.6
1.6
1.81.8
Fig. 6. Contours of Mach number for flow over the blunt body for b ¼ 0:5, M1 ¼ 3:5, 17� 9 grid.
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 79
boundary condition. In Fig. 7, the pressure at the stagnation point is seen to be more than 16 times the
freestream pressure at M1 ¼ 3:5, and the jump in pressure across the normal shock at the centerline is over13 times the freestream pressure.
As a means of code validation, a comparison is made between the numerical results for the pressure
distribution on the body with that of the modified Newtonian [33] sine squared law
Cp ¼ Cp0 sin2 /; ð95Þ
where Cp0 is the pressure coefficient at the body stagnation point and / is the local surface inclination anglemeasured with respect to the z axis. The pressure coefficient, Cp, is defined as
-
0.2 0 0.2 0.4 0.6 0.80
0.5
1
1.5
z
r
5.5
6.5
7.5
8.5
10
11.5
13.5
1516
Fig. 7. Contours of pressure for flow over the blunt body for b ¼ 0:5, M1 ¼ 3:5, 17� 9 grid.
80 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
Cp ¼p� � p�112q�1w�21
¼ p n; 0; sð Þ � 112cM21
: ð96Þ
The modified Newtonian approximation is a semi-analytical model for the surface pressure distribution
over blunt bodies. Anderson [34] reports that for a power law body with b ¼ 0:5 and aspect ratio near unity,the modified Newtonian approximation does well in predicting the pressure distribution on the surface of
the body. As can be seen from Fig. 8, the pseudospectral code also predicts close agreement for the pressure
0 0.2 0.4 0.6 0.8 10.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
r
Cp
Pseudospectral predictionModified Newtonian theory
Fig. 8. Blunt body surface Cp distribution predictions at M1 ¼ 3:5 from modified Newtonian theory and from the pseudospectralmethod, where b ¼ 0:5; 17� 9 grid.
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 81
distribution on the surface of the body defined by r ¼ffiffiz
p. As a further check on the validity of the
pseudospectral code in Fig. 9 a comparison is made of the pseudospectral prediction for the shock shape for
M1 ¼ 3:5 flow over a sphere with that of an empirical formula by Billig [35] developed for flow overspherically blunted cones based on experiment.
A grid convergence study is performed for the blunt body with the L1½X� error over the domain, X inqðn; gÞ shown in Fig. 10, at M1 ¼ 3:5 and b ¼ 0:5, where the error is measured against a 65� 33 or 2145node numerical solution. For 861 nodes, the L1½X� error over the domain, X in qðn; gÞ, has been reduced tothe order of 10�12 and subsequently flattens due to roundoff error. Like grid convergence plots for the
Taylor–Maccoll solution, the convergence of the error for the blunt body problem shows a spectral con-
vergence rate as expected of the pseudospectral numerical technique.
0.6 0.4 0.2 0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
1.2
1.4
z
r
Body surfacePseudospectral predictionBillig
Fig. 9. Shock shape prediction of the pseudospectral code for a sphere M1 ¼ 3:5 compared with an empirical formula by Billig [35]derived from experiments; 17� 9 grid.
101
102
103
1010
105
number of nodes
L ∞[Ω
] err
or in
ρ
Fig. 10. Grid convergence L1½X� error in qðn; gÞ measured against a baseline, 65� 33 grid, solution for a b ¼ 0:5, M1 ¼ 3:5 bluntbody.
-
82 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
2.7.3. Unsteady acoustic wave interaction with attached shock
Now we turn to a fundamentally unsteady problem: the interaction of an unsteady, planar acoustic wave
with an attached shock, for which the automatic time step selection in LSODA enables us to have tightcontrol over the error in the solution. A schematic of the grid is shown in Fig. 3, where r0 ¼ 0:01 is chosenfor this problem. The values of the freestream flow quantities q1, u1, w1, p1 at the shock are taken to be
q1 ¼ �1
2ffiffiffic
p F n; sð Þð � G n; sð ÞÞ; ð97Þ
u1 ¼ 0; ð98Þ
w1 ¼1
2F n; sð Þð þ G n; sð ÞÞ; ð99Þ
p1 ¼ 1þ c q1ð � 1Þ; ð100Þwhere
F n; sð Þ ¼ ffiffifficp ðM1 � 1Þ; ð101Þ
G n; sð Þ ¼ ffiffifficp ðM1 þ 1Þð1þ � sin jðzðn; 1; sÞ � ffiffifficp ðM1 þ 1ÞsÞÞ: ð102Þ
Choosing � ¼ 0:01, j ¼ 6p, M1 ¼ 3:5, and c ¼ 1:4 in Eqs. (101) and (102), the system of ODEs in Eq. (9)are integrated in time for s 2 ½0; 2� on a 33� 17 grid using the ODE solver LSODA. The CPU time for thecalculation on a single 800 MHz processor was 7.5 h. The initial conditions were set to the Taylor–Maccoll
solution of the unperturbed freestream flow conditions, i.e. q1 ¼ 1, u1 ¼ 0, w1 ¼ffiffiffic
pM1, p1 ¼ 1. The
relative and absolute error tolerances for the time integration were set to 10�10 and 10�12, respectively, in
LSODA. As an estimate for the spatial accuracy, we recall that the L1½X� error in qðn; gÞ on a 33� 17 gridfor the steady state calculations was 10�12 and 10�9 for the Taylor–Maccoll and blunt body flows,
respectively.
Let us analyze the motion of a single point on the shock located at n ¼ g ¼ 1. The power spectrum, Pðf Þ,as a function of reduced frequency for the perturbation in freestream density, Dq1 ¼ q1 � 1, and shockdistance function, Dh ¼ hð1; tÞ � h1ð1Þ, at the point n ¼ g ¼ 1 are presented in Fig. 11 as well as Dq1jz¼�1,which is well upstream of the shock. Initial transients in the solution are neglected in the estimation of the
power spectrum by considering only s 2 ½1:001; 2�, so that the time interval is T ¼ 0:999. The powerspectrum is defined at K=2þ 1 frequencies as
P ðf0Þ ¼1
K2jC0j2;
P ðfkÞ ¼1
K2jCkj2h
þ jCK�kj2i; k ¼ 1; . . . ; K
2
�� 1
�;
P ðfK=2Þ ¼1
K2jCK=2j2;
ð103Þ
where fk is defined only for the zero and positive frequencies
fk ¼kKD
; k ¼ 0; . . . ; K2
� �; ð104Þ
where D ¼ 0:001 is the chosen sampling interval, K ¼ T=Dþ 1 ¼ 1000 is the number of sampled points, andthe Ck are the discrete Fourier coefficients. The power spectrum, Fig. 11, clearly shows a large peak in the
-
0 20 40 60 80 10010
12
1010
108
106
104
102
100
reduced frequency (fk)
P(f
k)
∆ ρ∞|z= 1∆ ρ∞∆ h
Fig. 11. Frequency spectrum at a single point on the shock ðn ¼ 1Þ of the fluctuations in freestream density, Dq1 ¼ q1 � 1, and theresponse of the shock, Dh ¼ hð1; tÞ � h1ð1Þ. M1 ¼ 3:5; 33� 17 grid.
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 83
power spectrum for Dq1jz¼�1 at a reduced frequency of f16 ¼ ðj=2pÞffiffiffic
p ðM1 þ 1Þ ¼ 16:0, according to Eq.(9). Peaks in the power spectrum of Dh, and Dq1 also appear at f16 ¼ 16:0 in response to the frequency ofoscillation of Dq1jz¼�1. In addition, higher harmonics at integer multiples of the f16 ¼ 16:0 �forcing� fre-quency are present in the power spectrum of Dh and Dq1.
The time history of the density fluctuations and perturbation in shock distance function both measured
at the point n ¼ g ¼ 1 are shown in Fig. 12 for s 2 ½1:75; 2:0�. It is evident from Fig. 12 that the freestreamdensity fluctuations are nearly 180� out of phase with the shock distance perturbations, and that the am-plitude of the density fluctuations are 20% of the mean flow, while the shock response is two orders of
magnitude below the perturbations in freestream density. The high accuracy of the current method is
critical in capturing the correct shock dynamics for such small amplitude fluctuations, and in predicting the
higher harmonics of the shock fluctuations in Fig. 11, where the amplitude of the power spectrum drops
1.7 1.75 1.8 1.85 1.9 1.95 2-0.3
-0.2
-0.1
0
0.1
0.2
0.3
∆ρ∞
1.7 1.75 1.8 1.85 1.9 1.95 2-6
-4
-2
0
2
4
6 x 10-3
∆h∞
τ
∆ ρ∞
∆ h
Fig. 12. Time history at a single point on the shock ðn ¼ 1Þ of the fluctuations in freestream density, Dq1 ¼ q1 � 1, and the responseof the shock, Dh ¼ hð1; tÞ � h1ð1Þ. M1 ¼ 3:5; 33� 17 grid.
-
84 G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85
several orders of magnitude with each successively increasing harmonic. The current method is able to
resolve up to the fourth harmonic of Dh, whose amplitude in the power spectrum is on the order of 10�10.
3. Conclusion
In this study, we have described a pseudospectral numerical approximation technique for the inviscid
supersonic flow over a blunt body geometry in which the discretized form of the governing equations and
boundary conditions are formulated in terms of a system of ODE�s which can be solved using a standardODE solver. This formulation leverages the strengths of widely available ODE solvers to generate time
accurate solutions within prescribed error tolerances through automatic time step selection and explicit/implicit switching. Additionally, fitting of the shock and the use of global polynomials in the solution
approximation permit high accuracy steady state approximations with 10�5 error in as little as 106 s on a
single 800 MHz processor. Even higher accuracy has been achieved for a time-dependent problem. This
standard formulation has important potential applications such as approximating unsteady shock phe-
nomena with sufficient accuracy to discern between physical versus numerical instabilities.
References
[1] G.P. Brooks, J.M. Powers, A Karhunen-Lo�eve least-squares technique for optimization of geometry of a blunt body in supersonic
flow, J. Comput. Phys. (2004), in press.
[2] D. Gottlieb, S. Orszag, Numerical Analysis of Spectral Methods: Theory and Applications, SIAM-CBMS, Philadelphia, 1977.
[3] N.K Yamaleev, M.H. Carpenter, On accuracy of adaptive grid methods for captured shocks, J. Comput. Phys. 181 (2002) 280–
316.
[4] S.P. D�yakov, On the stability of shock waves, ZETF 27 (1954) 288–295.[5] V.M. Kontorovich, Concerning the stability of shock waves, Sov. Phys. JETP 6 (1957) 1179–1180.
[6] J.W. Bates, D.C. Montgomery, The D�yakov instability of shock waves in real gases, Phys. Rev. Lett. 84 (6) (2000) 1180–1183.[7] K.M. Peery, S.T. Imlay, Blunt body flow simulations, AIAA Paper 88-2924, 1988.
[8] J.-Ch. Robinet, J. Gressier, G. Casalis, J.-M. Moschetta, Shock wave instability and the carbuncle phenomenon: same intrinsic
origin?, J. Fluid Mech. 417 (2000) 237–263.
[9] J.J. Quirk, A contribution to the great Riemann solver debate, Int. J. Numer. Meth. Fluids 18 (1994) 555.
[10] J. Gressier, J.-M. Moschetta, Robustness versus accuracy in shock-wave computations, Int. J. Numer. Meth. Fluids 33 (2000)
313–332.
[11] J.-F. Coulombel, S. Benzoni-Gavage, D. Serre, Note on a Paper by Robinet, Gressier, Casalis and Moschetta, J. Fluid Mech. 469
(2002) 401–405.
[12] V.V. Rusanov, A blunt body in a supersonic stream, Annu. Rev. Fluid Mech. 8 (1976) 377–404.
[13] W.D. Hayes, R.F. Probstein, Hypersonic flow theory, Inviscid Flows, vol. 1, Academic Press, New York, 1966.
[14] C.C. Lin, S.I. Rubinov, On the flow behind curved shocks, J. Math. Phys. 27 (1948) 105–129.
[15] P.R. Garabedian, H.M. Lieberstein, On the numerical calculation of detached bow shock waves in hypersonic flow, J. Aero Sci. 25
(1) (1958) 109–118.
[16] M.D. Van Dyke, The supersonic blunt-body problem – review and extension, J. Aero/Space Sci. 25 (4) (1958) 485–496.
[17] M.W. Evans, F.H. Harlow, Calculation of supersonic flow past an axially symmetric cylinder, J. Aero Sci. 25 (1) (1958) 269.
[18] G. Moretti, M. Abbett, A time-dependent computational method for blunt body flows, AIAA J. 4 (12) (1966) 2136–2141.
[19] M.Y. Hussaini, D.A. Kopriva, M.D. Salas, T.A. Zang, Spectral methods for the Euler equations: Part 2. Chebyshev methods and
shock-fitting, AIAA J. 23 (2) (1985) 234–240.
[20] D.A. Kopriva, T.A. Zang, M.Y. Hussaini, Spectral methods for the Euler equations: the blunt body problem revisited, AIAA J. 29
(9) (1991) 1458–1462.
[21] D.A. Kopriva, Shock-fitted multidomain solution of supersonic flows, Comput. Meth. Appl. Mech. Eng. 175 (1999) 383–394.
[22] G.P. Brooks, J.M. Powers, A Karhunen–Lo�eve Galerkin technique with shock-fitting for optimization of a blunt body geometry,
AIAA Paper 2002-3861, 2002.
[23] C. Canuto, M.Y. Hussaini, A. Quarteroni, T.A. Zang, Spectral Methods in Fluid Dynamics, Springer, New York, 1988.
[24] D. Gottlieb, J.S. Hesthaven, Spectral methods for hyperbolic problems, J. Comput. Appl. Math. 128 (2001) 83–131.
[25] B. Fornberg, A Practical Guide to Psuedospectral Methods, Cambridge University Press, Cambridge, 1998.
-
G.P. Brooks, J.M. Powers / Journal of Computational Physics 197 (2004) 58–85 85
[26] B.A. Finlayson, The Method of Weighted Residuals and Variational Principles, Academic Press, New York, 1972.
[27] K.W. Thompson, Time dependent boundary conditions for hyperbolic systems, J. Comput. Phys. 68 (1987) 1–24.
[28] K.W. Thompson, Time dependent boundary conditions for hyperbolic systems, II, J. Comput. Phys. 89 (1990) 439–461.
[29] G.P. Brooks, A Karhunen–Lo�eve least-squares technique for Optimization of Geometry of a Blunt Body in Supersonic Flow,
Ph.D. Dissertation, University of Notre Dame, Notre Dame, IN, 2003.
[30] A.C. Hindmarsh, ODEpack, A systematized collection of ODE solvers, in: R.S. Stepleman et al. (Eds.), Scientific Computing,
North-Holland, Amsterdam, 1983, p. 55.
[31] L.R. Petzold, Automatic selection of methods for solving stiff and nonstiff systems of ordinary differential equations, SIAM J. Sci.
Comput. 4 (1983) 136.
[32] G.I. Taylor, J.W. Maccoll, The air pressure on a cone moving at high speeds, Proc. R. Soc. A 139 (1933) 278–311.
[33] L. Lees, Hypersonic flow, in: Proceedings of the Fifth International Aeronautical Conference, Los Angeles, Institute of the
Aeronautical Sciences, New York, 1955, pp. 241–276.
[34] J.D. Anderson, Hypersonic and High Temperature Gas Dynamics, McGraw-Hill, New York, 1989.
[35] F.S. Billig, Shock-wave shapes around spherical and cylinder-nosed bodies, J. Spacecraft Rockets 4 (6) (1967) 822–823.
Standardized pseudospectral formulation of the inviscid supsersonic blunt body problemIntroductionSupersonic blunt body flow and pseudospectral solverStandard formulationGoverning equationsComputational and physical coordinatesBoundary conditionsSummary of governing equations and boundary conditionsNumerical solution techniquePseudospectral flow solver verification and validationTaylor-Maccoll solutionSteady state blunt body resultsUnsteady acoustic wave interaction with attached shock
ConclusionReferences