
Operating Instructions VLT AutomationDrive FC … Basic Programming 24 ... A power drive system...
80
MAKING MODERN LIVING POSSIBLE Operating Instructions VLT ® AutomationDrive FC 301/302 0.25-75 kW www.danfoss.com/drives
Transcript of Operating Instructions VLT AutomationDrive FC … Basic Programming 24 ... A power drive system...

MAKING MODERN LIVING POSSIBLE
Operating InstructionsVLT® AutomationDrive FC 301/3020.25-75 kW
www.danfoss.com/drives


Contents
1 Introduction 3
1.1 Purpose of the Manual 3
1.2 Additional Resources 3
1.3 Document and Software Version 3
1.4 Product Overview 3
1.5 Approvals and Certifications 6
1.6 Disposal 6
2 Safety 7
2.1 Safety Symbols 7
2.2 Qualified Personnel 7
2.3 Safety Precautions 7
3 Mechanical Installation 9
3.1 Unpacking 9
3.2 Installation Environments 9
3.3 Mounting 9
4 Electrical Installation 11
4.1 Safety Instructions 11
4.2 EMC-compliant Installation 11
4.3 Grounding 11
4.4 Wiring Schematic 12
4.5 Access 14
4.6 Motor Connection 14
4.7 AC Mains Connection 15
4.8 Control Wiring 15
4.8.1 Control Terminal Types 16
4.8.2 Wiring to Control Terminals 17
4.8.3 Enabling Motor Operation (Terminal 27) 17
4.8.4 Voltage/Current Input Selection (Switches) 18
4.8.5 Safe Torque Off (STO) 18
4.8.6 Mechanical Brake Control 18
4.8.7 RS-485 Serial Communication 19
4.9 Installation Check List 20
5 Commissioning 21
5.1 Safety Instructions 21
5.2 Applying Power 21
5.3 Local Control Panel Operation 22
Contents VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 1

5.4 Basic Programming 24
5.4.1 Commissioning with SmartStart 24
5.4.2 Commissioning via [Main Menu] 25
5.4.3 Asynchronous Motor Setup 25
5.4.4 PM Motor Setup in VVCplus 25
5.4.5 Automatic Motor Adaptation (AMA) 26
5.5 Checking Motor Rotation 27
5.6 Checking Encoder Rotation 27
5.7 Local-control Test 27
5.8 System Start-up 28
6 Application Set-up Examples 29
7 Maintenance, Diagnostics and Troubleshooting 35
7.1 Maintenance and Service 35
7.2 Status Messages 35
7.3 Warning and Alarm Types 37
7.4 List of Warnings and Alarms 38
7.5 Troubleshooting 45
8 Specifications 47
8.1 Electrical Data 47
8.1.1 Mains Supply 3x200-240 V AC 47
8.1.2 Mains Supply 3x380-500 V AC 49
8.1.3 Mains Supply 3x525-600 V AC (FC 302 only) 52
8.1.4 Mains Supply 3x525-690 V AC (FC 302 only) 55
8.2 Mains Supply 57
8.3 Motor Output and Motor Data 57
8.4 Ambient Conditions 58
8.5 Cable Specifications 58
8.6 Control Input/Output and Control Data 58
8.7 Fuses and Circuit Breakers 62
8.8 Connection Tightening Torques 68
8.9 Power Ratings, Weight and Dimensions 69
9 Appendix 70
9.1 Symbols, Abbreviations and Conventions 70
9.2 Parameter Menu Structure 70
Index 75
Contents VLT® AutomationDrive FC 301/302 Operating Instructions
2 MG33AO02 - Rev. 2013-11-07
1 Introduction
1.1 Purpose of the Manual
These operating instructions provide information for safeinstallation and commissioning of the frequency converter.
The operating instructions are intended for use byqualified personnel.Read and follow the operating instructions to use thefrequency converter safely and professionally, and payparticular attention to the safety instructions and generalwarnings. Keep these operating instructions available withthe frequency converter at all times.
1.2 Additional Resources
Other resources are available to understand advancedfrequency converter functions and programming.
• The VLT® Programming Guide provides greaterdetail on working with parameters and manyapplication examples.
• The VLT® Design Guide provides detailedinformation about capabilities and functionality todesign motor control systems.
• Instructions for operation with optionalequipment.
Supplementary publications and manuals are availablefrom Danfoss. See www.danfoss.com/BusinessAreas/DrivesSo-lutions/Documentations/VLT+Technical+Documentation.htmfor listings.
Disclosure, duplication and sale of this document, as wellas communication of its content, are prohibited unlessexplicitly permitted. Infringement of this prohibition incursliability for damages. All rights reserved with regard topatents, utility patents and registered designs. VLT® is aregistered trademark.
1.3 Document and Software Version
This manual is regularly reviewed and updated. Allsuggestions for improvement are welcome. Table 1.1 showsthe document version and the corresponding softwareversion.
Edition Remarks Software version
MG33AOxx Replaces MG33ANxx 6.72
Table 1.1 Document and Software Version
1.4 Product Overview
1.4.1 Intended Use
The frequency converter is an electronic motor controllerintended for
• regulation of motor speed in response to systemfeedback or to remote commands from externalcontrollers. A power drive system consists of thefrequency converter, the motor and equipmentdriven by the motor.
• system and motor status surveillance.
The frequency converter can also be used for motorprotection.
Depending on configuration, the frequency converter canbe used in standalone applications or form part of a largerappliance or installation.
The frequency converter is allowed for use in residential,industrial and commercial environments in accordancewith local laws and standards.
NOTICEIn a residential environment this product can cause radiointerference, in which case supplementary mitigationmeasures can be required.
Foreseeable misuseDo not use the frequency converter in applications whichare non-compliant with specified operating conditions andenvironments. Ensure compliance with the conditionsspecified in 8 Specifications.
Introduction VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 3
1 1

1.4.2 Exploded Views
1
2
3
4
5
6
7
8
9
10
11
12 13
1617
1819
1415
FAN MOUNTING
QDF-30
DC- DC+
Remove jumper to activate Safe StopMax. 24 Volt !
12 13 18 19 27 29 32 33 20
61 6839 42 50 53 54
0605
0403
0201
130B
B493
.10
1 Local control panel (LCP) 11 Relay 2 (04, 05, 06)
2 Cover 12 Lifting ring
3 RS-485 serial bus connector 13 Mounting slot
4 Digital I/O and 24 V power supply 14 Grounding clamp (PE)
5 Analog I/O connector 15 Cable screen connector
6 Cable screen connector 16 Brake terminal (-81, +82)
7 USB connector 17 Load sharing terminal (DC bus) (-88, +89)
8 Serial bus terminal switch 18 Motor output terminals 96 (U), 97 (V), 98 (W)
9 Analog switches (A53), (A54) 19 Mains input terminals 91 (L1), 92 (L2), 93 (L3)
10 Relay 1 (01, 02, 03)
Illustration 1.1 Exploded View Enclosure Types B and C, IP55 and IP66
Introduction VLT® AutomationDrive FC 301/302 Operating Instructions
4 MG33AO02 - Rev. 2013-11-07
11
1
23
4
5
6
7
8
9
10
11
1213
14
8
15
16
17
18
130B
B492
.10
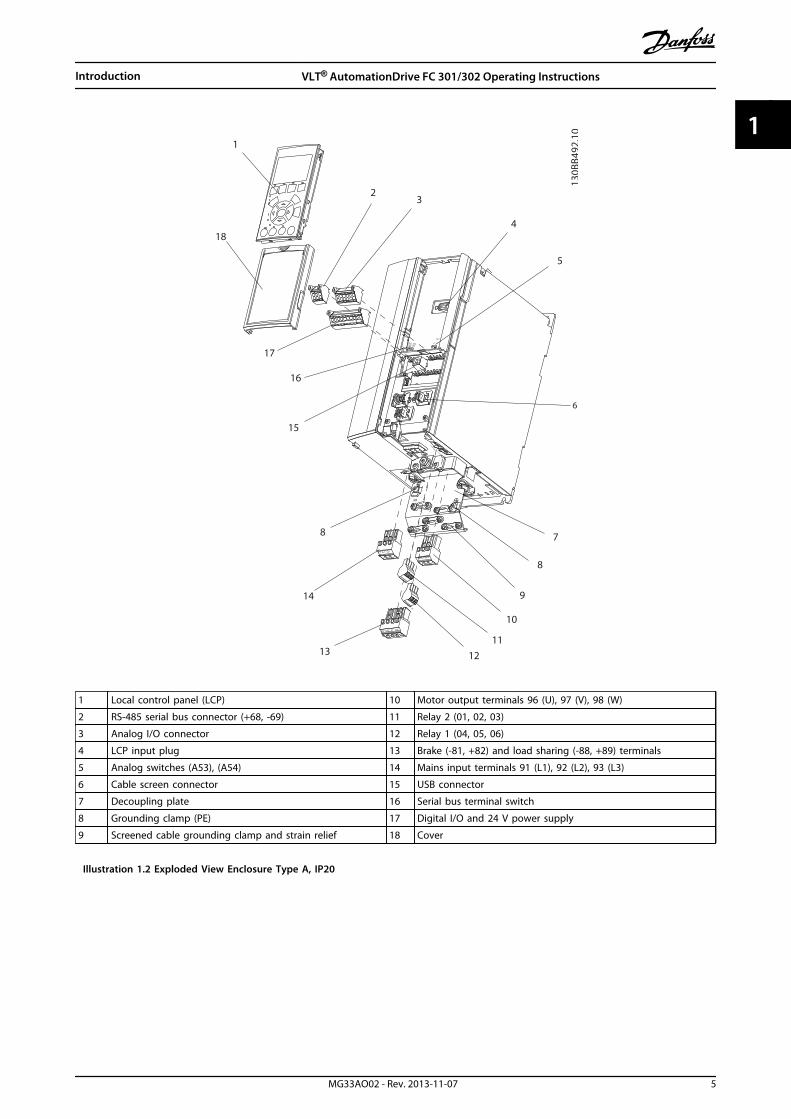
1 Local control panel (LCP) 10 Motor output terminals 96 (U), 97 (V), 98 (W)
2 RS-485 serial bus connector (+68, -69) 11 Relay 2 (01, 02, 03)
3 Analog I/O connector 12 Relay 1 (04, 05, 06)
4 LCP input plug 13 Brake (-81, +82) and load sharing (-88, +89) terminals
5 Analog switches (A53), (A54) 14 Mains input terminals 91 (L1), 92 (L2), 93 (L3)
6 Cable screen connector 15 USB connector
7 Decoupling plate 16 Serial bus terminal switch
8 Grounding clamp (PE) 17 Digital I/O and 24 V power supply
9 Screened cable grounding clamp and strain relief 18 Cover
Illustration 1.2 Exploded View Enclosure Type A, IP20
Introduction VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 5
1 1

1.4.3 Block Diagram of the FrequencyConverter
Illustration 1.3 is a block diagram of the frequencyconverter's internal components. See Table 1.4 for theirfunctions.
Illustration 1.3 Frequency Converter Block Diagram
Area Title Functions
1 Mains input
• 3-phase AC mains powersupply to the frequencyconverter
2 Rectifier
• The rectifier bridge convertsthe AC input to DC current tosupply inverter power
3 DC bus• Intermediate DC-bus circuit
handles the DC current
4 DC reactors
• Filter the intermediate DCcircuit voltage
• Prove line transient protection
• Reduce RMS current
• Raise the power factorreflected back to the line
• Reduce harmonics on the ACinput
5 Capacitor bank
• Stores the DC power
• Provides ride-throughprotection for short powerlosses
6 Inverter
• Converts the DC into acontrolled PWM AC waveformfor a controlled variableoutput to the motor
7 Output to motor• Regulated 3-phase output
power to the motor
Area Title Functions
8 Control circuitry
• Input power, internalprocessing, output, and motorcurrent are monitored toprovide efficient operationand control
• User interface and externalcommands are monitored andperformed
• Status output and control canbe provided
Table 1.2 Legend to Illustration 1.3
1.4.4 Enclosure Types and Power Ratings
For enclosure types and power ratings of the frequencyconverters, refer to 8.9 Power Ratings, Weight andDimensions.
1.5 Approvals and Certifications
Table 1.3 Approvals and Certifications
More approvals and certifications are available. Contactlocal Danfoss partner. Frequency converters of enclosuretype T7 (525-690 V) are not certified for UL.
The frequency converter complies with UL508C thermalmemory retention requirements. For more information,refer to the section Motor Thermal Protection in the DesignGuide.
For compliance with the European Agreement concerningInternational Carriage of Dangerous Goods by InlandWaterways (ADN), refer to ADN-compliant Installation in theDesign Guide.
1.6 Disposal
Do not dispose of equipment containingelectrical components together withdomestic waste.Collect it separately in accordance withlocal and currently valid legislation.
Table 1.4 Disposal Instruction
Introduction VLT® AutomationDrive FC 301/302 Operating Instructions
6 MG33AO02 - Rev. 2013-11-07
11

2 Safety
2.1 Safety Symbols
The following symbols are used in this document:
WARNINGIndicates a potentially hazardous situation which couldresult in death or serious injury.
CAUTIONIndicates a potentially hazardous situation which couldresult in minor or moderate injury. It may also be usedto alert against unsafe practices.
NOTICEIndicates important information, including situations thatmay result in damage to equipment or property.
2.2 Qualified Personnel
Correct and reliable transport, storage, installation,operation and maintenance are required for the trouble-free and safe operation of the frequency converter. Onlyqualified personnel is allowed to install or operate thisequipment.
Qualified personnel is defined as trained staff, who areauthorised to install, commission, and maintain equipment,systems and circuits in accordance with pertinent laws andregulations. Additionally, the personnel must be familiarwith the instructions and safety measures described in thisdocument.
2.3 Safety Precautions
WARNINGHIGH VOLTAGEFrequency converters contain high voltage whenconnected to AC mains input power. Failure to performinstallation, start-up, and maintenance by qualifiedpersonnel could result in death or serious injury.
• Installation, start-up, and maintenance must beperformed by qualified personnel only.
WARNINGUNINTENDED STARTWhen the frequency converter is connected to AC mains,the motor may start at any time, causing risk of death,serious injury, equipment, or property damage. Themotor can start by means of an external switch, a serialbus command, an input reference signal from the LCP orLOP, or after a cleared fault condition.
1. Disconnect the frequency converter from mainswhenever personal safety considerations makeit necessary to avoid unintended motor start.
2. Press [Off] on the LCP, before programmingparameters.
3. The frequency converter, motor, and any drivenequipment must be in operational readinesswhen the frequency converter is connected toAC mains.
WARNINGDISCHARGE TIMEThe frequency converter contains DC-link capacitors,which can remain charged even when the frequencyconverter is not powered. Failure to wait the specifiedtime after power has been removed before performingservice or repair work, could result in death or seriousinjury.
1. Stop motor.
2. Disconnect AC mains, permanent magnet typemotors, and remote DC-link power supplies,including battery back-ups, UPS, and DC-linkconnections to other frequency converters.
3. Wait for the capacitors to discharge fully, beforeperforming any service or repair work. Theduration of waiting time is specified inTable 2.1.
Voltage [V] Minimum waiting time [minutes]
4 7 15
200-240 0.25-3.7 kW 5.5-37 kW
380-500 0.25-7.5 kW 11-75 kW
525-600 0.75-7.5 kW 11-75 kW
525-690 1.5-7.5 kW 11-75 kW
High voltage may be present even when the warning LEDindicator lights are off.
Table 2.1 Discharge Time
Safety VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 7
2 2

WARNINGLEAKAGE CURRENT HAZARDLeakage currents exceed 3.5 mA. Failure to ground thefrequency converter properly could result in death orserious injury.
• Ensure correct grounding of the equipment bya certified electrical installer.
WARNINGEQUIPMENT HAZARDContact with rotating shafts and electrical equipmentcan result in death or serious injury.
• Ensure only trained and qualified personnelperform installation, start up, and maintenance.
• Ensure that electrical work conforms to nationaland local electrical codes.
• Follow the procedures in this manual.
CAUTIONWINDMILLINGUnintended rotation of permanent magnet motorscauses risk of personal injury and equipment damage.
• Ensure that permanent magnet motors areblocked to prevent unintended rotation.
CAUTIONPOTENTIAL HAZARD IN THE EVENT OF INTERNALFAILURERisk of personal injury when the frequency converter isnot properly closed.
• Before applying power, ensure all safety coversare in place and securely fastened.
Safety VLT® AutomationDrive FC 301/302 Operating Instructions
8 MG33AO02 - Rev. 2013-11-07
22

3 Mechanical Installation
3.1 Unpacking
3.1.1 Items Supplied
Items supplied may vary according to product configu-ration.
• Make sure the items supplied and theinformation on the nameplate correspond to theorder confirmation.
• Check the packaging and the frequency convertervisually for damage caused by inappropriatehandling during shipment. File any claim fordamage with the carrier. Retain damaged partsfor clarification.
130B
D60
0.10
CHASSIS/ IP20 Tamb.50 C/122 F
VLT
MADE IN DENMARK
R
P/N: 131X3537 S/N: 010122G430
0.37kW/ 0.50HP
IN: 3x200-240V 50/60Hz 2.2A
OUT: 3x0-Vin 0-1000Hz 2.4Ao
CAUTION:See manual for special condition/mains fusevoir manual de conditions speclales/fusibles
WARNING:Stored charge, wait 4 min.Charge residuelle, attendez 4 min.
* 1 3 1 X 3 5 3 7 0 1 0 1 2 2 G 4 3 0 *
`
Automation Drivewww.danfoss.com
T/C: FC-302PK37T2E20H1BGXXXXSXXXXA6BKC4XXXD0
Listed 76X1 E134261 Ind. Contr. Eq.
o
`
12
4
5
6
7 8
9
10
3
1 Type code
2 Order number
3 Serial number
4 Power rating
5Input voltage, frequency and current (at low/highvoltages)
6Output voltage, frequency and current (at low/highvoltages)
7 Enclosure type and IP rating
8 Maximum ambient temperature
9 Certifications
10 Discharge time (Warning)
Illustration 3.1 Product Nameplate (Example)
NOTICEDo not remove the nameplate from the frequencyconverter (loss of warranty).
3.1.2 Storage
Ensure that requirements for storage are fulfilled. Refer to 8.4 Ambient Conditions for further details.
3.2 Installation Environments
NOTICEIn environments with airborne liquids, particles, orcorrosive gases, ensure that the IP/Type rating of theequipment matches the installation environment. Failureto meet requirements for ambient conditions can reducelifetime of the frequency converter. Ensure thatrequirements for air humidity, temperature and altitudeare met.
Vibration and ShockThe frequency converter complies with requirements forunits mounted on the walls and floors of productionpremises, as well as in panels bolted to walls or floors.
For detailed ambient conditions specifications, refer to 8.4 Ambient Conditions.
3.3 Mounting
NOTICEImproper mounting can result in overheating andreduced performance.
Cooling
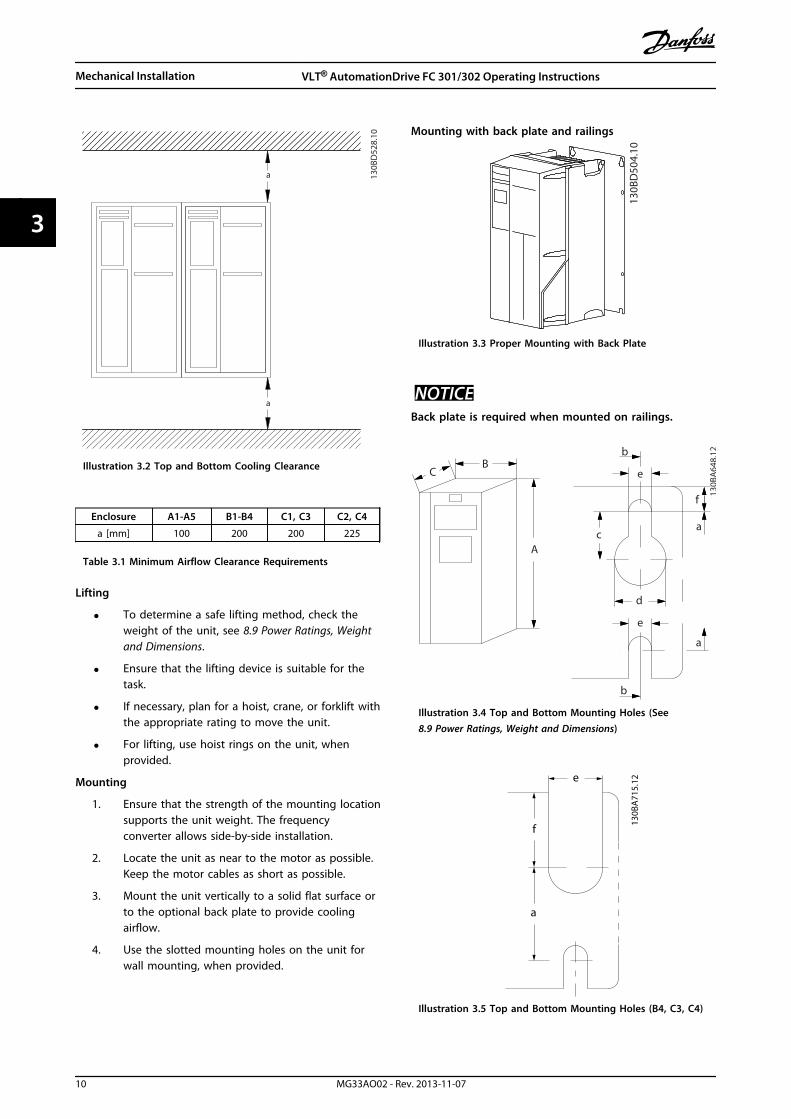
• Ensure that top and bottom clearance for aircooling is provided. See Illustration 3.2 forclearance requirements.
Mechanical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 9
3 3
a
a
130B
D52
8.10
Illustration 3.2 Top and Bottom Cooling Clearance
Enclosure A1-A5 B1-B4 C1, C3 C2, C4
a [mm] 100 200 200 225
Table 3.1 Minimum Airflow Clearance Requirements
Lifting
• To determine a safe lifting method, check theweight of the unit, see 8.9 Power Ratings, Weightand Dimensions.
• Ensure that the lifting device is suitable for thetask.
• If necessary, plan for a hoist, crane, or forklift withthe appropriate rating to move the unit.
• For lifting, use hoist rings on the unit, whenprovided.
Mounting
1. Ensure that the strength of the mounting locationsupports the unit weight. The frequencyconverter allows side-by-side installation.
2. Locate the unit as near to the motor as possible.Keep the motor cables as short as possible.
3. Mount the unit vertically to a solid flat surface orto the optional back plate to provide coolingairflow.
4. Use the slotted mounting holes on the unit forwall mounting, when provided.
Mounting with back plate and railings
130B
D50
4.10
Illustration 3.3 Proper Mounting with Back Plate
NOTICEBack plate is required when mounted on railings.
C
a
b
130B
A64
8.12
f
e
B
A
a
d
e
b
c
Illustration 3.4 Top and Bottom Mounting Holes (See 8.9 Power Ratings, Weight and Dimensions)
a
e
f
130B
A71
5.12
Illustration 3.5 Top and Bottom Mounting Holes (B4, C3, C4)
Mechanical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
10 MG33AO02 - Rev. 2013-11-07
33

4 Electrical Installation
4.1 Safety Instructions
See 2 Safety for general safety instructions.
WARNINGINDUCED VOLTAGEInduced voltage from output motor cables that runtogether can charge equipment capacitors even with theequipment turned off and locked out. Failure to runoutput motor cables separately or use screened cablescould result in death or serious injury.
• run output motor cables separately, or
• use screened cables
CAUTIONSHOCK HAZARDThe frequency converter can cause a DC current in thePE conductor. Failure to follow the recommendationbelow means the RCD may not provide the intendedprotection.
• When a residual current-operated protectivedevice (RCD) is used for protection againstelectrical shock, only an RCD of Type B ispermitted on the supply side.
Over-current Protection
• Additional protective equipment such as short-circuit protection or motor thermal protectionbetween frequency converter and motor isrequired for applications with multiple motors.
• Input fusing is required to provide short-circuitand over-current protection. If not factory-supplied, fuses must be provided by the installer.See maximum fuse ratings in 8.7 Fuses and CircuitBreakers.
Wire Type and Ratings
• All wiring must comply with local and nationalregulations regarding cross-section and ambienttemperature requirements.
• Power connection wire recommendation:minimum 75 °C rated copper wire.
See 8.1 Electrical Data and 8.5 Cable Specifications forrecommended wire sizes and types.
4.2 EMC-compliant Installation
To obtain an EMC-compliant installation, follow theinstructions provided in 4.3 Grounding, 4.4 WiringSchematic, 4.6 Motor Connection, and 4.8 Control Wiring.
4.3 Grounding
WARNINGLEAKAGE CURRENT HAZARDLeakage currents exceed 3.5 mA. Failure to ground thefrequency converter properly could result in death orserious injury.
• Ensure correct grounding of the equipment bya certified electrical installer.
For electrical safety
• Ground the frequency converter in accordancewith applicable standards and directives.
• Use a dedicated ground wire for input power,motor power and control wiring.
• Do not ground one frequency converter toanother in a “daisy chain” fashion.
• Keep the ground wire connections as short aspossible.
• Follow motor manufacturer wiring requirements.
• Minimum cable cross-section: 10 mm2 (or 2 ratedground wires terminated separately).
For EMC-compliant installation
• Establish electrical contact between cable screenand frequency converter enclosure by usingmetal cable glands or by using the clampsprovided on the equipment (see Illustration 4.5and Illustration 4.6).
• Use high-strand wire to reduce electricalinterference.
• Do not use pigtails.
NOTICEPOTENTIAL EQUALISATIONRisk of electrical interference, when the ground potentialbetween the frequency converter and the system isdifferent. Install equalising cables between the systemcomponents. Recommended cable cross-section: 16 mm2.
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 11
4 4
4.4 Wiring Schematic
130B
D59
9.10
3-phasepowerinput
DC bus Switch ModePower Supply
Motor
Analog Output
Interface
relay1
relay2
ON=TerminatedOFF=Open
Brakeresistor
91 (L1)92 (L2)93 (L3)
PE
88 (-)89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC15 mA 130/200 mA
+ - + -
(U) 96(V) 97(W) 98(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0 V
5V
S801
0/4-20 mA
RS-485RS-485
03
+10 V DC0/-10 V DC -
+10 V DC
+10 V DC0/4-20 mA
0/-10 V DC-
240 V AC, 2 A
24 V DC
02
01
05
04
06
24 V (NPN) 0 V (PNP)
0 V (PNP)24 V (NPN)
19 (D IN)
24 V (NPN) 0 V (PNP)27
24 V
0 V
(D IN/OUT)
0 V (PNP)24 V (NPN)
(D IN/OUT)
0 V
24 V29
24 V (NPN) 0 V (PNP)
0 V (PNP)24 V (NPN)
33 (D IN)
32 (D IN)
12
ON
S201
ON2
1S202ON=0/4-20 mAOFF=0/-10 V DC - +10 V DC
95
P 5-00
21 O
N
S801
(R+) 82
(R-) 81
: Chassis
: Ground
**
240 V AC, 2 A
400 V AC, 2 A
*
*
*
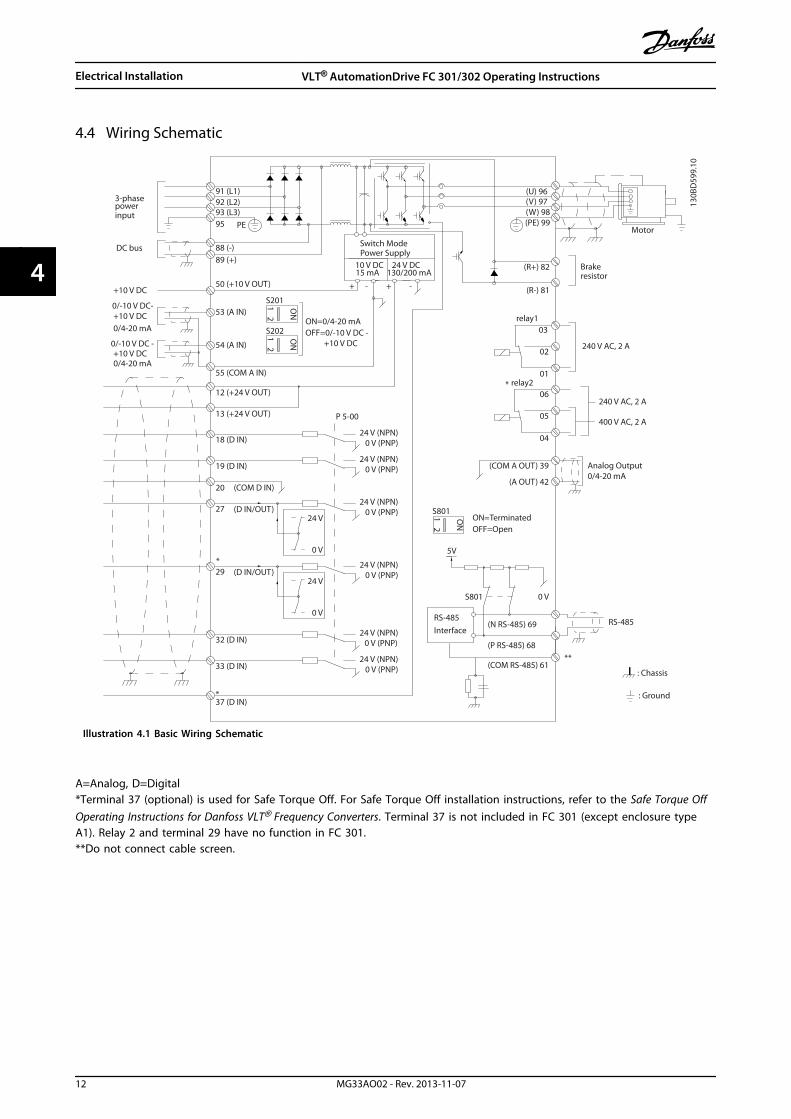
Illustration 4.1 Basic Wiring Schematic
A=Analog, D=Digital*Terminal 37 (optional) is used for Safe Torque Off. For Safe Torque Off installation instructions, refer to the Safe Torque OffOperating Instructions for Danfoss VLT® Frequency Converters. Terminal 37 is not included in FC 301 (except enclosure typeA1). Relay 2 and terminal 29 have no function in FC 301.**Do not connect cable screen.
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
12 MG33AO02 - Rev. 2013-11-07
44

130B
D52
9.10
1
2
3
4
5
6
78
PE
UVW
9
L1L2L3PE
10
Illustration 4.2 EMC-compliant Electrical Connection
1 PLC 6 Cable gland
2 Frequency converter 7 Motor, 3-phase and PE (screened)
3 Output contactor 8 Mains, 3-phase and reinforced PE (not screened)
4 Cable clamp 9 Control wiring (screened)
5 Cable insulation (stripped) 10 Potential equalisation min. 16 mm2 (0.025 in)
Table 4.1 Legend to Illustration 4.2
NOTICEEMC INTERFERENCE!Use screened cables for motor and control wiring, and separate cables for input power, motor wiring and controlwiring. Failure to isolate power, motor and control cables can result in unintended behaviour or reduced performance.Minimum 200 mm (7.9 in) clearance between power, motor and control cables is required.
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 13
4 4

4.5 Access
• Remove cover with a screw driver (SeeIllustration 4.3) or by loosening attaching screws(See Illustration 4.4).
130B
T248
.10
Illustration 4.3 Access to Wiring for IP20 and IP21 Enclosures
130B
T334
.10
Illustration 4.4 Access to Wiring for IP55 and IP66 Enclosures
See Table 4.2 before tightening covers.
Enclosure IP55 IP66
A4/A5 2 2
B1/B2 2.2 2.2
C1/C2 2.2 2.2
No screws to tighten for A1/A2/A3/B3/B4/C3/C4.
Table 4.2 Tightening Torques for Covers [Nm]
4.6 Motor Connection
WARNINGINDUCED VOLTAGEInduced voltage from output motor cables that runtogether can charge equipment capacitors even with theequipment turned off and locked out. Failure to runoutput motor cables separately or use screened cablescould result in death or serious injury.
• run output motor cables separately, or
• use screened cables
• Comply with local and national electrical codesfor cable sizes. For maximum wire sizes see8.1 Electrical Data.
• Follow motor manufacturer wiring requirements.
• Motor wiring knockouts or access panels areprovided at the base of IP21 (NEMA1/12) andhigher units.
• Do not wire a starting or pole-changing device(e.g. Dahlander motor or slip ring inductionmotor) between the frequency converter and themotor.
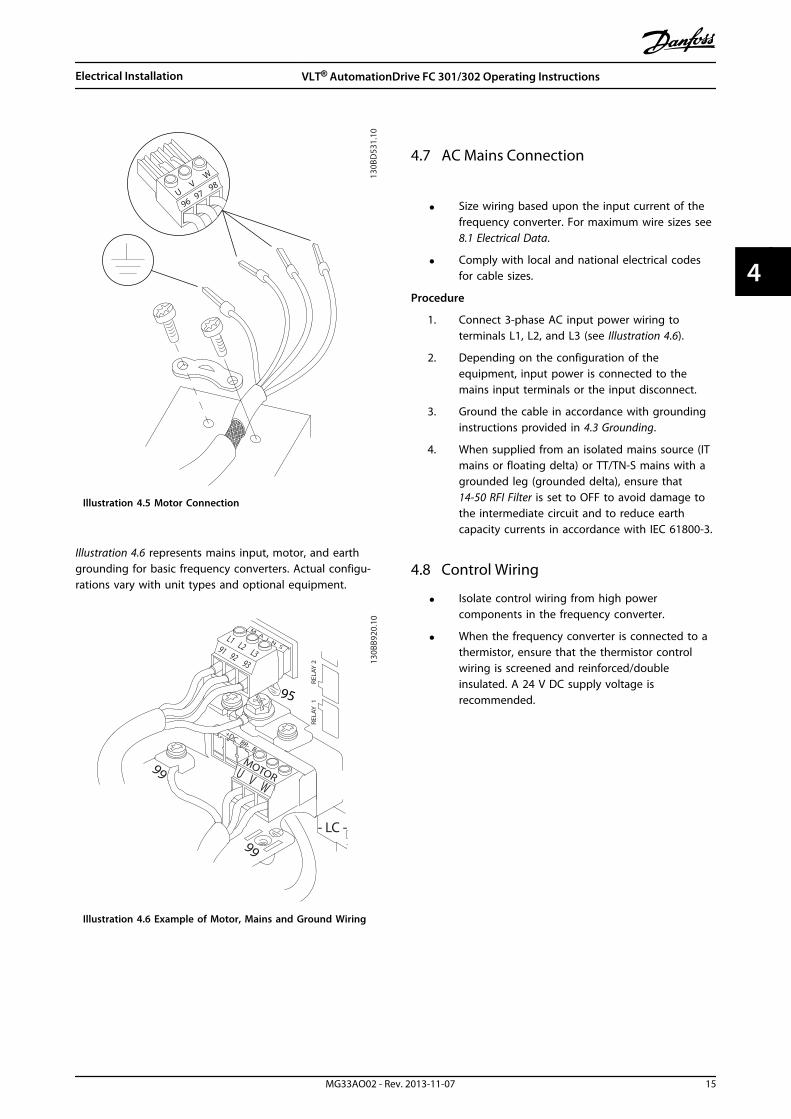
Procedure
1. Strip a section of the outer cable insulation.
2. Position the stripped wire under the cable clampto establish mechanical fixation and electricalcontact between cable screen and ground.
3. Connect ground wire to the nearest groundingterminal in accordance with groundinginstructions provided in 4.3 Grounding, seeIllustration 4.5.
4. Connect the 3-phase motor wiring to terminals96 (U), 97 (V), and 98 (W), see Illustration 4.5.
5. Tighten terminals in accordance with theinformation provided in 8.8 Connection TighteningTorques.
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
14 MG33AO02 - Rev. 2013-11-07
44
130B
D53
1.10
UV
W
9697
98
Illustration 4.5 Motor Connection
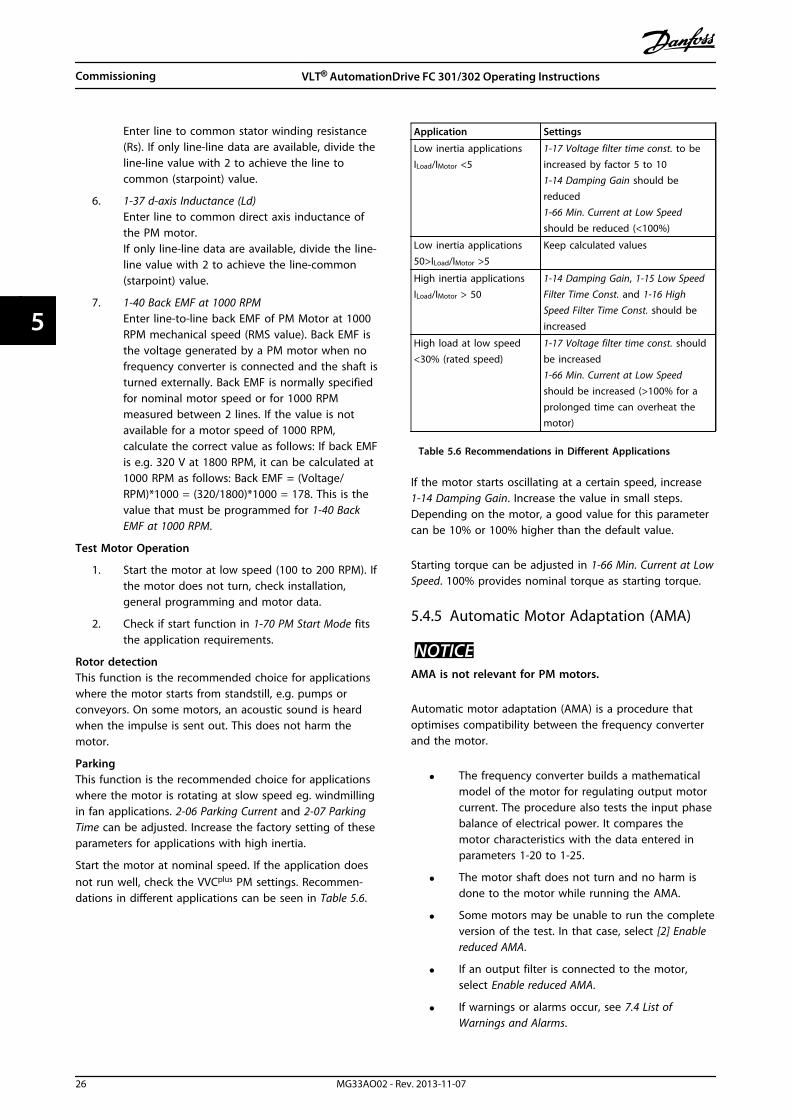
Illustration 4.6 represents mains input, motor, and earthgrounding for basic frequency converters. Actual configu-rations vary with unit types and optional equipment.
95
130B
B920
.10
+DC BR- B
MA
IN
S
L1 L2 L391 92 93
REL
AY
1
REL
AY
2
99
- LC -
U V W
MOTOR
99
Illustration 4.6 Example of Motor, Mains and Ground Wiring
4.7 AC Mains Connection
• Size wiring based upon the input current of thefrequency converter. For maximum wire sizes see8.1 Electrical Data.
• Comply with local and national electrical codesfor cable sizes.
Procedure
1. Connect 3-phase AC input power wiring toterminals L1, L2, and L3 (see Illustration 4.6).
2. Depending on the configuration of theequipment, input power is connected to themains input terminals or the input disconnect.
3. Ground the cable in accordance with groundinginstructions provided in 4.3 Grounding.
4. When supplied from an isolated mains source (ITmains or floating delta) or TT/TN-S mains with agrounded leg (grounded delta), ensure that14-50 RFI Filter is set to OFF to avoid damage tothe intermediate circuit and to reduce earthcapacity currents in accordance with IEC 61800-3.
4.8 Control Wiring
• Isolate control wiring from high powercomponents in the frequency converter.
• When the frequency converter is connected to athermistor, ensure that the thermistor controlwiring is screened and reinforced/doubleinsulated. A 24 V DC supply voltage isrecommended.
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 15
4 4

4.8.1 Control Terminal Types
Illustration 4.7 and Illustration 4.8 show the removablefrequency converter connectors. Terminal functions anddefault settings are summarised in Table 4.3 and Table 4.4.
23
4
113
0BB9
21.11
Illustration 4.7 Control Terminal Locations
12 13 18 19 27 29 32 33 20 37
39 42 50 53 54 5561 68 69
130B
B931
.101
2 3
Illustration 4.8 Terminal Numbers
• Connector 1 provides 4 programmable digitalinputs terminals, 2 additional digital terminalsprogrammable as either input or output, a 24 VDC terminal supply voltage, and a common foroptional customer supplied 24 V DC voltage. FC302 and FC 301 (optional in A1 enclosure) alsoprovide a digital input for STO (Safe Torque Off)function.
• Connector 2 terminals (+)68 and (-)69 for RS-485serial communication connection
• Connector 3 provides 2 analog inputs, 1 analogoutput, 10 V DC supply voltage, and commonsfor the inputs and output
• Connector 4 is a USB port available for use withthe MCT 10 Set-up Software
Terminal description
Terminal ParameterDefaultsetting Description
Digital inputs/outputs
12, 13 - +24 V DC 24 V DC supplyvoltage for digitalinputs and externaltransducers. Maximumoutput current 200mA (130 mA for FC301) for all 24 V loads.
18 5-10 [8] Start
Digital inputs.
19 5-11 [10] Reversing
32 5-14 [0] Nooperation
33 5-15 [0] Nooperation
27 5-12 [2] Coastinverse
For digital input oroutput. Default settingis input.29 5-13 [14] JOG
20 - Common for digitalinputs and 0 Vpotential for 24 Vsupply.
37 - Safe TorqueOff (STO)
Safe input. Used forSTO.
Analog inputs/outputs
39 -
Common for analogoutput
42 6-50 [0] Nooperation
Programmable analogoutput. 0-20 mA or4-20 mA at a
maximum of 500 Ω50 - +10 V DC 10 V DC analog
supply voltage forpotentiometer orthermistor. 15 mAmaximum
53 6-1* Reference Analog input. Forvoltage or current.Switches A53 and A54select mA or V.
54 6-2* Feedback
55 -
Common for analoginput
Table 4.3 Terminal Description Digital Inputs/Outputs,Analog Inputs/Outputs
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
16 MG33AO02 - Rev. 2013-11-07
44

Terminal description
Terminal ParameterDefaultsetting Description
Serial communication
61 -
Integrated RC-Filterfor cable screen. ONLYfor connecting thescreen in the event ofEMC problems.
68 (+) 8-3* RS-485 Interface. Acontrol card switch isprovided fortermination resistance.
69 (-) 8-3*
Relays
01, 02, 03 5-40 [0][0] Nooperation
Form C relay output.For AC or DC voltageand resistive orinductive loads.
04, 05, 06 5-40 [1] [0] Nooperation
Table 4.4 Terminal Description Serial Communication
Additional terminals:
• 2 form C relay outputs. Location of the outputsdepends on frequency converter configuration.
• Terminals located on built-in optional equipment.See the manual provided with the equipmentoption.
4.8.2 Wiring to Control Terminals
Control terminal connectors can be unplugged from thefrequency converter for ease of installation, as shown inIllustration 4.7.
NOTICEKeep control wires as short as possible and separatefrom high power cables to minimise interference.
1. Open the contact by inserting a small screwdriver into the slot above the contact and pushthe screw driver slightly upwards.
130B
D54
6.10
2
1
10 m
m
2927 32191813 12
33
Illustration 4.9 Connecting Control Wires
2. Insert the bared control wire into the contact.
3. Remove the screw driver to fasten the controlwire into the contact.
4. Ensure the contact is firmly established and notloose. Loose control wiring can be the source ofequipment faults or less than optimal operation.
See 8.5 Cable Specifications for control terminal wiring sizesand 6 Application Set-up Examples for typical control wiringconnections.
4.8.3 Enabling Motor Operation (Terminal27)
A jumper wire may be required between terminal 12 (or13) and terminal 27 for the frequency converter to operatewhen using factory default programming values.
• Digital input terminal 27 is designed to receive an24 V DC external interlock command. In manyapplications, the user wires an external interlockdevice to terminal 27.
• When no interlock device is used, wire a jumperbetween control terminal 12 (recommended) or13 to terminal 27. This provides an internal 24 Vsignal on terminal 27.
• When the status line at the bottom of the LCPreads AUTO REMOTE COAST, this indicates thatthe unit is ready to operate but is missing aninput signal on terminal 27.
• When factory installed optional equipment iswired to terminal 27, do not remove that wiring.
NOTICEThe frequency converter cannot operate without a signalon terminal 27 unless terminal 27 is re-programmed.
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 17
4 4

4.8.4 Voltage/Current Input Selection(Switches)
The analog input terminals 53 and 54 allow setting ofinput signal to voltage (0-10 V) or current (0/4-20 mA).
Default parameter settings:• Terminal 53: speed reference signal in open loop
(see 16-61 Terminal 53 Switch Setting).
• Terminal 54: feedback signal in closed loop (see16-63 Terminal 54 Switch Setting).
NOTICEDisconnect power to the frequency converter beforechanging switch positions.
1. Remove the local control panel (seeIllustration 4.10).
2. Remove any optional equipment covering theswitches.
3. Set switches A53 and A54 to select the signaltype. U selects voltage, I selects current.
130B
D53
0.10
12
N
O
VLT
BUSTER.OFF-ONA53 A54U- I U- I
Illustration 4.10 Location of Terminals 53 and 54 Switches
4.8.5 Safe Torque Off (STO)
To run Safe Torque Off, additional wiring for the frequencyconverter is required, refer to Safe Torque Off OperatingInstructions for Danfoss VLT® Frequency Converters forfurther information.
4.8.6 Mechanical Brake Control
In hoisting/lowering applications, it is necessary tocontrol an electro-mechanical brake:
• Control the brake using any relay output ordigital output (terminal 27 or 29).
• Keep the output closed (voltage-free) as long asthe frequency converter is unable to keep themotor at standstill, for example due to the loadbeing too heavy.
• Select [32] Mechanical brake control in parametergroup 5-4* Relays for applications with an electro-mechanical brake.
• The brake is released when the motor currentexceeds the preset value in 2-20 Release BrakeCurrent.
• The brake is engaged when the output frequencyis less than the frequency set in 2-21 ActivateBrake Speed [RPM] or 2-22 Activate Brake Speed[Hz], and only if the frequency converter carriesout a stop command.
If the frequency converter is in alarm mode or in an over-voltage situation, the mechanical brake immediately closes.
The frequency converter is not a safety device. It is theresponsibility of the system designer to integrate safetydevices according to relevant national crane/liftregulations.
L1 L2 L3
U V W
02 01
A1
A2
130B
A90
2.10
DriveOutput
relay
Command Circuit220Vac
MechanicalBrake
ShaftMotor
Frewheelingdiode
Brake380Vac
OutputContactorInput
Power Circuit
Illustration 4.11 Connecting the Mechanical Brake to theFrequency Converter
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
18 MG33AO02 - Rev. 2013-11-07
44

4.8.7 RS-485 Serial Communication
Connect RS-485 serial communication wiring to terminals(+)68 and (-)69.
• Use screened serial communication cable(recommended).
• See 4.3 Grounding for proper grounding.
61
68
69
+13
0BB4
89.1
0
RS-485
Illustration 4.12 Serial Communication Wiring Diagram
For basic serial communication set-up, select the following:
1. Protocol type in 8-30 Protocol.
2. Frequency converter address in 8-31 Address.
3. Baud rate in 8-32 Baud Rate.
• 2 communication protocols are internal to thefrequency converter.
Danfoss FC
Modbus RTU
• Functions can be programmed remotely usingthe protocol software and RS-485 connection orin parameter group 8-** Communications andOptions
• Selecting a specific communication protocolchanges various default parameter settings tomatch that protocol’s specifications along withmaking additional protocol-specific parametersavailable
• Option cards which install into the frequencyconverter are available to provide additionalcommunication protocols. See the option-carddocumentation for installation and operationinstructions
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 19
4 4

4.9 Installation Check List
Before completing installation of the unit, inspect the entire installation as detailed in Table 4.5. Check and mark the itemswhen completed.
Inspect for Description Auxiliary equipment • Look for auxiliary equipment, switches, disconnects, or input fuses/circuit breakers that may reside on the
input power side of the frequency converter or output side to the motor. Ensure that they are ready forfull-speed operation
• Check function and installation of any sensors used for feedback to the frequency converter
• Remove any power factor correction caps on motor(s)
• Adjust any power factor correction caps on the mains side and ensure that they are dampened
Cable routing • Ensure that motor wiring and control wiring are separated or screened or in 3 separate metallic conduitsfor high-frequency interference isolation
Control wiring • Check for broken or damaged wires and loose connections
• Check that control wiring is isolated from power and motor wiring for noise immunity
• Check the voltage source of the signals, if necessary
• The use of screened cable or twisted pair is recommended. Ensure that the shield is terminated correctly
Cooling clearance • Measure that top and bottom clearance is adequate to ensure proper air flow for cooling, see 3.3 Mounting
Ambient conditions • Check that requirements for ambient conditions are met
Fusing and circuitbreakers
• Check for proper fusing or circuit breakers
• Check that all fuses are inserted firmly and are in operational condition and that all circuit breakers are inthe open position
Grounding • Check for sufficient ground connections that are tight and free of oxidation
• Grounding to conduit, or mounting the back panel to a metal surface, is not a suitable grounding
Input and outputpower wiring
• Check for loose connections
• Check that motor and mains are in separate conduit or separated screened cables
Panel interior • Inspect that the unit interior is free of dirt, metal chips, moisture, and corrosion
• Check that the unit is mounted on an unpainted, metal surface
Switches • Ensure that all switch and disconnect settings are in the proper positions
Vibration • Check that the unit is mounted solidly, or that shock mounts are used, as necessary
• Check for an unusual amount of vibration
Table 4.5 Installation Check List
CAUTIONPOTENTIAL HAZARD IN THE EVENT OF INTERNAL FAILURERisk of personal injury when the frequency converter is not properly closed.
• Before applying power, ensure all safety covers are in place and securely fastened.
Electrical Installation VLT® AutomationDrive FC 301/302 Operating Instructions
20 MG33AO02 - Rev. 2013-11-07
44

5 Commissioning
5.1 Safety Instructions
See 2 Safety for general safety instructions.
WARNINGHIGH VOLTAGEFrequency converters contain high voltage whenconnected to AC mains input power. Failure to performinstallation, start-up, and maintenance by qualifiedpersonnel could result in death or serious injury.
• Installation, start-up, and maintenance must beperformed by qualified personnel only.
Before applying power:1. Close cover properly.
2. Check that all cable glands are firmly tightened.
3. Ensure that input power to the unit is OFF andlocked out. Do not rely on the frequencyconverter disconnect switches for input powerisolation.
4. Verify that there is no voltage on input terminalsL1 (91), L2 (92), and L3 (93), phase-to-phase andphase-to-ground.
5. Verify that there is no voltage on outputterminals 96 (U), 97 (V), and 98 (W), phase-to-phase and phase-to-ground.
6. Confirm continuity of the motor by measuringohm values on U-V (96-97), V-W (97-98), and W-U(98-96).
7. Check for proper grounding of the frequencyconverter as well as the motor.
8. Inspect the frequency converter for looseconnections on terminals.
9. Confirm that the supply voltage matches voltageof frequency converter and motor.
5.2 Applying Power
WARNINGUNINTENDED STARTWhen the frequency converter is connected to AC mains,the motor may start at any time, causing risk of death,serious injury, equipment, or property damage. Examples: start by means of an external switch; via aserial bus command; via an input reference signal fromthe LCP or LOP; or after a cleared fault condition.
1. Disconnect the frequency converter from mainswhenever personal safey considerations make itnecessary to avoid unintended motor start.
2. Press [Off] on the LCP, before programmingparameters.
3. The frequency converter, motor, and any drivenequipment must be in operational readinesswhen the frequency converter is connected toAC mains.
1. Confirm that the input voltage is balanced within3%. If not, correct input voltage imbalance beforeproceeding. Repeat this procedure after thevoltage correction.
2. Ensure that optional equipment wiring, if present,matches the installation application.
3. Ensure that all operator devices are in the OFFposition. Panel doors must be closed or covermounted.
4. Apply power to the unit. DO NOT start thefrequency converter at this time. For units with adisconnect switch, turn to the ON position toapply power to the frequency converter.
NOTICEWhen the status line at the bottom of the LCP readsAUTO REMOTE COASTING or Alarm 60 External Interlockis displayed, this indicates that the unit is ready tooperate but is missing an input signal on terminal 27.See 4.8.3 Enabling Motor Operation (Terminal 27) fordetails.
Commissioning VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 21
5 5

5.3 Local Control Panel Operation
5.3.1 Local Control Panel
The local control panel (LCP) is the combined display andkeypad on the front of the unit.
The LCP has several user functions:
• Start, stop, and control speed when in localcontrol
• Display operational data, status, warnings andcautions
• Programming frequency converter functions
• Manually reset the frequency converter after afault when auto-reset is inactive
An optional numeric LCP (NLCP) is also available. The NLCPoperates in a manner similar to the LCP. See theProgramming Guide for details on use of the NLCP.
NOTICEFor commissioning via PC, install MCT 10 Set-upSoftware. The software is available for download (basicversion) or for ordering (advanced version, order number130B1000). For more information and downloads, seewww.danfoss.com/BusinessAreas/DrivesSolutions/Software+MCT10/MCT10+Downloads.htm.
NOTICEDuring start-up the LCP displays the messageINITIALISING. When this message is no longer displayed,then the frequency converter is ready for operation.Adding or removing options can extend the duration ofstart-up.
5.3.2 LCP Layout
The LCP is divided into 4 functional groups (seeIllustration 5.1).
A. Display area
B. Display menu keys
C. Navigation keys and indicator lights (LEDs)
D. Operation keys and reset
130B
D59
8.10
Autoon
ResetHandon
O
Status QuickMenu
MainMenu
AlarmLog
Back
CancelInfoOK
Status 1(1)36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
78
9
10
11
12
13
14
15
16
17
18 19 20 21
Illustration 5.1 Local Control Panel (LCP)
A. Display areaThe display area is activated when the frequency converterreceives power from mains voltage, a DC bus terminal, oran external 24 V DC supply.
The information displayed on the LCP can be customisedfor user application. Select options in the Quick MenuQ3-13 Display Settings.
Display Parameter number Default setting
1 0-20 Speed [RPM]
2 0-21 Motor Current
3 0-22 Power [kW]
4 0-23 Frequency
5 0-24 Reference [%]
Table 5.1 Legend to Illustration 5.1, Display Area
B. Display menu keysMenu keys are used for menu access for parameter set-up,toggling through status display modes during normaloperation, and viewing fault log data.
Key Function6 Status Shows operational information.
7 Quick Menu Allows access to programming parametersfor initial set-up instructions and manydetailed application instructions.
Commissioning VLT® AutomationDrive FC 301/302 Operating Instructions
22 MG33AO02 - Rev. 2013-11-07
55

Key Function8 Main Menu Allows access to all programming
parameters.
9 Alarm Log Displays a list of current warnings, the last10 alarms, and the maintenance log.
Table 5.2 Legend to Illustration 5.1, Display Menu Keys
C. Navigation keys and indicator lights (LEDs)Navigation keys are used for programming functions andmoving the display cursor. The navigation keys alsoprovide speed control in local operation. There are also 3frequency converter status indicator lights in this area.
Key Function
10 Back Reverts to the previous step or list in themenu structure.
11 Cancel Cancels the last change or command as longas the display mode has not changed.
12 Info Press for a definition of the function beingdisplayed.
13 NavigationKeys
Use the 4 navigation keys to move betweenitems in the menu.
14 OK Use to access parameter groups or to enablea choice.
Table 5.3 Legend to Illustration 5.1, Navigation Keys
Indicator Light Function
15 On Green The ON light activates when thefrequency converter receivespower from mains voltage, a DCbus terminal, or an external 24 Vsupply.
16 Warn Yellow When warning conditions are met,the yellow WARN light comes onand text appears in the displayarea identifying the problem.
17 Alarm Red A fault condition causes the redalarm light to flash and an alarmtext is displayed.
Table 5.4 Legend to Illustration 5.1, Indicator Lights (LEDs)
D. Operation keys and resetOperation keys are located at the bottom of the LCP.
Key Function
18 Hand On Starts the frequency converter in localcontrol.
• An external stop signal by control inputor serial communication overrides thelocal hand on
19 Off Stops the motor but does not removepower to the frequency converter.
20 Auto On Puts the system in remote operationalmode.
• Responds to an external start commandby control terminals or serial communi-cation
21 Reset Resets the frequency converter manuallyafter a fault has been cleared.
Table 5.5 Legend to Illustration 5.1, Operation Keys and Reset
NOTICEThe display contrast can be adjusted by pressing [Status]and []/[] keys.
5.3.3 Parameter Settings
Establishing the correct programming for applicationsoften requires setting functions in several relatedparameters. Details for parameters are provided in 9.2 Parameter Menu Structure.
Programming data are stored internally in the frequencyconverter.
• For back-up, upload data into the LCP memory
• To download data to another frequencyconverter, connect the LCP to that unit anddownload the stored settings
• Restoring factory default settings does notchange data stored in the LCP memory
5.3.4 Uploading/Downloading Data to/fromthe LCP
1. Press [Off] to stop the motor before uploading ordownloading data.
2. Go to [Main Menu] 0-50 LCP Copy and Press [OK].
3. Select [1] All to LCP to upload data to LCP orselect [2] All from LCP to download data from theLCP.
4. Press [OK]. A progress bar shows the uploadingor downloading process.
5. Press [Hand On] or [Auto On] to return to normaloperation.
Commissioning VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 23
5 5

5.3.5 Changing Parameter Settings
View changesQuick Menu Q5 - Changes Made lists all parameterschanged from default settings.
• The list shows only parameters which have beenchanged in the current edit-setup.
• Parameters which have been reset to defaultvalues are not listed.
• The message Empty indicates that no parametershave been changed.
Changing settingsParameter settings can be accessed and changed from the[Quick Menu] or from the [Main Menu]. The [Quick Menu]only gives access to a limited number of parameters.
1. Press [Quick Menu] or [Main Menu] on the LCP.
2. Press [] [] to browse through the parametergroups, press [OK] to select a parameter group.
3. Press [] [] to browse through the parameters,press [OK] to select a parameter.
4. Press [] [] to change the value of a parametersetting.
5. Press [] [] to shift digit when a decimalparameter is in the editing state.
6. Press [OK] to accept the change.
7. Press either [Back] twice to enter “Status”, orpress [Main Menu] once to enter “Main Menu”.
5.3.6 Restoring Default Settings
NOTICERisk of loosing programming, motor data, localisation,and monitoring records by restoration of defaultsettings. To provide a back-up, upload data to the LCPbefore initialisation.
Restoring the default parameter settings is done by initiali-sation of the frequency converter. Initialisation is carriedout through 14-22 Operation Mode (recommended) ormanually.
• Initialisation using 14-22 Operation Mode does notreset frequency converter settings such asoperating hours, serial communication selections,personal menu settings, fault log, alarm log, andother monitoring functions.
• Manual initialisation erases all motor,programming, localisation, and monitoring dataand restores factory default settings.
Recommended initialisation procedure, via14-22 Operation Mode
1. Press [Main Menu] twice to access parameters.
2. Scroll to 14-22 Operation Mode and press [OK].
3. Scroll to Initialisation and press [OK].
4. Remove power to the unit and wait for thedisplay to turn off.
5. Apply power to the unit.
Default parameter settings are restored during start-up.This may take slightly longer than normal.
6. Alarm 80 is displayed.
7. Press [Reset] to return to operation mode.
Manual initialisation procedure
1. Remove power to the unit and wait for thedisplay to turn off.
2. Press and hold [Status], [Main Menu], and [OK] atthe same time while applying power to the unit(approximately 5 s or until audible click and fanstarts).
Factory default parameter settings are restored duringstart-up. This may take slightly longer than normal.
Manual initialisation does not reset the following frequencyconverter information:
• 15-00 Operating hours
• 15-03 Power Up's
• 15-04 Over Temp's
• 15-05 Over Volt's
5.4 Basic Programming
5.4.1 Commissioning with SmartStart
The SmartStart wizard enables fast configuration of basicmotor and application parameters.
• At first power up or after initialisation of thefrequency converter, SmartStart starts by itself.
• Follow on-screen instructions to completecommissioning of the frequency converter.Always reactivate SmartStart by selecting QuickMenu Q4 - SmartStart.
• For commissioning without use of the SmartStartwizard, refer to 5.4.2 Commissioning via [MainMenu] or the Programming Guide.
NOTICEMotor data are required for the SmartStart set-up. Therequired data are normally available on the motornameplate.
Commissioning VLT® AutomationDrive FC 301/302 Operating Instructions
24 MG33AO02 - Rev. 2013-11-07
55

5.4.2 Commissioning via [Main Menu]
Recommended parameter settings are intended for start-up and checkout purposes. Application settings may vary.
Enter data with power ON, but before operating thefrequency converter.
1. Press [Main Menu] on the LCP.
2. Press the navigation keys to scroll to parametergroup 0-** Operation/Display and press [OK].
130B
P066
.10
1107 RPM
0 - ** Operation/Display
1 - ** Load/Motor
2 - ** Brakes
3 - ** Reference / Ramps
3.84 A 1 (1)
Main menu
Illustration 5.2 Main Menu
3. Press navigation keys to scroll to parametergroup 0-0* Basic Settings and press [OK].
0-**Operation / Display0.0%
0-0* Basic Settings0-1* Set-up Operations0-2* LCP Display0-3* LCP Custom Readout
0.00A 1(1)
130B
P087
.10
Illustration 5.3 Operation/Display
4. Press navigation keys to scroll to 0-03 RegionalSettings and press [OK].
0-0*Basic Settings0.0%
0-03 Regional Settings
[0] International
0.00A 1(1)
130B
P088
.10
Illustration 5.4 Basic Settings
5. Press navigation keys to select [0] International or[1] North America as appropriate and press [OK].(This changes the default settings for a numberof basic parameters).
6. Press [Main Menu] on the LCP.
7. Press the navigation keys to scroll to0-01 Language.
8. Select language and press [OK].
9. If a jumper wire is in place between controlterminals 12 and 27, leave 5-12 Terminal 27 DigitalInput at factory default. Otherwise, select NoOperation in 5-12 Terminal 27 Digital Input. Forfrequency converters with an optional bypass, nojumper wire is required between controlterminals 12 and 27.
10. 3-02 Minimum Reference
11. 3-03 Maximum Reference
12. 3-41 Ramp 1 Ramp Up Time
13. 3-42 Ramp 1 Ramp Down Time
14. 3-13 Reference Site. Linked to Hand/Auto LocalRemote.
5.4.3 Asynchronous Motor Setup
Enter the motor data in parameter 1-20 Motor Power [kW]or 1-21 Motor Power [HP] to 1-25 Motor Nominal Speed. Theinformation can be found on the motor nameplate.
1. 1-20 Motor Power [kW] or 1-21 Motor Power [HP]
2. 1-22 Motor Voltage
3. 1-23 Motor Frequency
4. 1-24 Motor Current
5. 1-25 Motor Nominal Speed
5.4.4 PM Motor Setup in VVCplus
Initial Programming Steps
1. Activate PM motor operation 1-10 MotorConstruction, select (1) PM, non salient SPM
2. Set 0-02 Motor Speed Unit to [0] RPM
Programming motor dataAfter selecting PM motor in 1-10 Motor Construction, thePM motor-related parameters in parameter groups 1-2*,1-3* and 1-4* are active.The necessary data can be found on the motor nameplateand in the motor data sheet.Program the following parameters in the listed order
1. 1-24 Motor Current
2. 1-26 Motor Cont. Rated Torque
3. 1-25 Motor Nominal Speed
4. 1-39 Motor Poles
5. 1-30 Stator Resistance (Rs)
Commissioning VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 25
5 5
Enter line to common stator winding resistance(Rs). If only line-line data are available, divide theline-line value with 2 to achieve the line tocommon (starpoint) value.
6. 1-37 d-axis Inductance (Ld)Enter line to common direct axis inductance ofthe PM motor.If only line-line data are available, divide the line-line value with 2 to achieve the line-common(starpoint) value.
7. 1-40 Back EMF at 1000 RPMEnter line-to-line back EMF of PM Motor at 1000RPM mechanical speed (RMS value). Back EMF isthe voltage generated by a PM motor when nofrequency converter is connected and the shaft isturned externally. Back EMF is normally specifiedfor nominal motor speed or for 1000 RPMmeasured between 2 lines. If the value is notavailable for a motor speed of 1000 RPM,calculate the correct value as follows: If back EMFis e.g. 320 V at 1800 RPM, it can be calculated at1000 RPM as follows: Back EMF = (Voltage/RPM)*1000 = (320/1800)*1000 = 178. This is thevalue that must be programmed for 1-40 BackEMF at 1000 RPM.
Test Motor Operation
1. Start the motor at low speed (100 to 200 RPM). Ifthe motor does not turn, check installation,general programming and motor data.
2. Check if start function in 1-70 PM Start Mode fitsthe application requirements.
Rotor detectionThis function is the recommended choice for applicationswhere the motor starts from standstill, e.g. pumps orconveyors. On some motors, an acoustic sound is heardwhen the impulse is sent out. This does not harm themotor.
ParkingThis function is the recommended choice for applicationswhere the motor is rotating at slow speed eg. windmillingin fan applications. 2-06 Parking Current and 2-07 ParkingTime can be adjusted. Increase the factory setting of theseparameters for applications with high inertia.
Start the motor at nominal speed. If the application doesnot run well, check the VVCplus PM settings. Recommen-dations in different applications can be seen in Table 5.6.
Application Settings
Low inertia applicationsILoad/IMotor <5
1-17 Voltage filter time const. to beincreased by factor 5 to 101-14 Damping Gain should bereduced1-66 Min. Current at Low Speedshould be reduced (<100%)
Low inertia applications50>ILoad/IMotor >5
Keep calculated values
High inertia applicationsILoad/IMotor > 50
1-14 Damping Gain, 1-15 Low SpeedFilter Time Const. and 1-16 HighSpeed Filter Time Const. should beincreased
High load at low speed<30% (rated speed)
1-17 Voltage filter time const. shouldbe increased1-66 Min. Current at Low Speedshould be increased (>100% for aprolonged time can overheat themotor)
Table 5.6 Recommendations in Different Applications
If the motor starts oscillating at a certain speed, increase1-14 Damping Gain. Increase the value in small steps.Depending on the motor, a good value for this parametercan be 10% or 100% higher than the default value.
Starting torque can be adjusted in 1-66 Min. Current at LowSpeed. 100% provides nominal torque as starting torque.
5.4.5 Automatic Motor Adaptation (AMA)
NOTICEAMA is not relevant for PM motors.
Automatic motor adaptation (AMA) is a procedure thatoptimises compatibility between the frequency converterand the motor.
• The frequency converter builds a mathematicalmodel of the motor for regulating output motorcurrent. The procedure also tests the input phasebalance of electrical power. It compares themotor characteristics with the data entered inparameters 1-20 to 1-25.
• The motor shaft does not turn and no harm isdone to the motor while running the AMA.
• Some motors may be unable to run the completeversion of the test. In that case, select [2] Enablereduced AMA.
• If an output filter is connected to the motor,select Enable reduced AMA.
• If warnings or alarms occur, see 7.4 List ofWarnings and Alarms.
Commissioning VLT® AutomationDrive FC 301/302 Operating Instructions
26 MG33AO02 - Rev. 2013-11-07
55

• Run this procedure on a cold motor for bestresults.
To run AMA1. Press [Main Menu] to access parameters.
2. Scroll to parameter group 1-** Load and Motorand press [OK].
3. Scroll to parameter group 1-2* Motor Data andpress [OK].
4. Scroll to 1-29 Automatic Motor Adaptation (AMA)and press [OK].
5. Select [1] Enable complete AMA and press [OK].
6. Follow on-screen instructions.
7. The test runs automatically and indicate when itis complete.
5.5 Checking Motor Rotation
Before running the frequency converter, check the motorrotation.
1. Press [Hand On].
2. Press [] for positive speed reference.
3. Check that the speed displayed is positive.
When 1-06 Clockwise Direction is set to [0] Normal (defaultclockwise):
4a. Verify that the motor turns clockwise.
5a. Verify that the LCP direction arrow isclockwise.
When 1-06 Clockwise Direction is set to [1] Inverse (counter-clockwise):
4b. Verify that the motor turns counter-clockwise.
5b. Verify that the LCP direction arrow is counter-clockwise.
5.6 Checking Encoder Rotation
NOTICEWhen using an encoder option, refer to the optionmanual.
Check encoder rotation only if encoder feedback is used.Check encoder rotation in default open loop control.
1. Verify that the encoder connection is accordingto Illustration 5.5:
130B
A09
0.11
+24V
DC
A B GN
D
1312 18 37322719 29 33 20
24V or 10-30V encoder
Illustration 5.5 Wiring Diagram
2. Enter the Speed PID feed-back source in7-00 Speed PID Feedback Source.
3. Press [Hand On].
4. Press [] for positive speed reference(1-06 Clockwise Direction at [0] Normal).
5. Check in 16-57 Feedback [RPM] that the feed-backis positive.
NOTICEIf the feedback is negative, the encoder connection iswrong!
5.7 Local-control Test
WARNINGMOTOR STARTFailure to ensure that the motor, system, and anyattached equipment are ready for start can result inpersonal injury or equipment damage. Before start,
• Ensure equipment is safe to operate under anycondition.
• Ensure that the motor, system, and anyattached equipment are ready for start.
1. Press [Hand On] to provide a local start commandto the frequency converter.
2. Accelerate the frequency converter by pressing[] to full speed. Moving the cursor left of thedecimal point provides quicker input changes.
3. Note any acceleration problems.
4. Press [Off]. Note any deceleration problems.
Commissioning VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 27
5 5

In the event of acceleration or deceleration problems, see 7.5 Troubleshooting. See 7.4 List of Warnings and Alarms forresetting the frequency converter after a trip.
5.8 System Start-up
The procedure in this section requires user-wiring andapplication programming to be completed. The followingprocedure is recommended after application set-up iscompleted.
WARNINGMOTOR STARTFailure to ensure that the motor, system, and anyattached equipment are ready for start can result inpersonal injury or equipment damage. Before start,
• Ensure equipment is safe to operate under anycondition.
• Ensure that the motor, system, and anyattached equipment are ready for start.
1. Press [Auto On].
2. Apply an external run command.
3. Adjust the speed reference throughout the speedrange.
4. Remove the external run command.
5. Check sound and vibration level of the motor toensure that the system is working as intended.
If warnings or alarms occur, see 7.4 List of Warnings andAlarms.
Commissioning VLT® AutomationDrive FC 301/302 Operating Instructions
28 MG33AO02 - Rev. 2013-11-07
55
6 Application Set-up Examples
The examples in this section are intended as a quickreference for common applications.
• Parameter settings are the regional default valuesunless otherwise indicated (selected in0-03 Regional Settings).
• Parameters associated with the terminals andtheir settings are shown next to the drawings.
• Where switch settings for analog terminals A53 orA54 are required, these are also shown.
NOTICEWhen the optional Safe Torque Off feature is used, ajumper wire may be required between terminal 12 (or13) and terminal 37 for the frequency converter tooperate when using factory default programming values.
6.1 Application Examples
6.1.1 AMA
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B929
.10 Function Setting
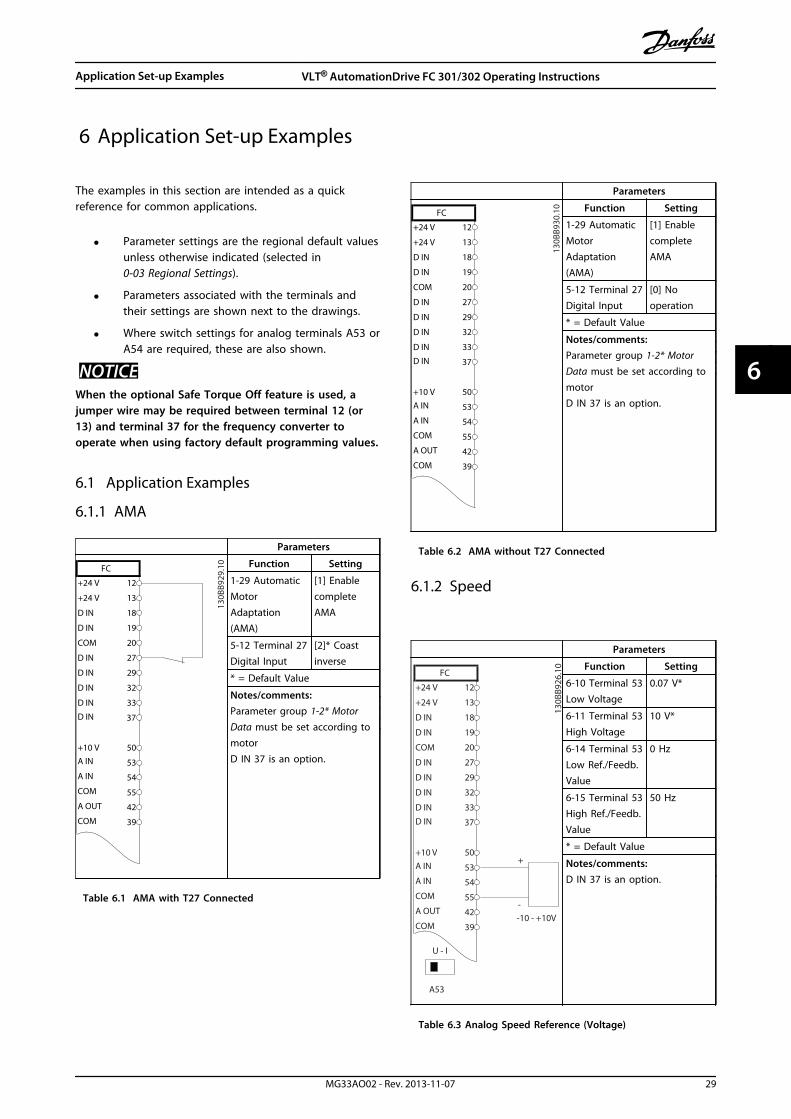
1-29 AutomaticMotorAdaptation(AMA)
[1] EnablecompleteAMA
5-12 Terminal 27Digital Input
[2]* Coastinverse
* = Default Value
Notes/comments:Parameter group 1-2* MotorData must be set according tomotorD IN 37 is an option.
Table 6.1 AMA with T27 Connected
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B930
.10 Function Setting
1-29 AutomaticMotorAdaptation(AMA)
[1] EnablecompleteAMA
5-12 Terminal 27Digital Input
[0] Nooperation
* = Default Value
Notes/comments:Parameter group 1-2* MotorData must be set according tomotorD IN 37 is an option.
Table 6.2 AMA without T27 Connected
6.1.2 Speed
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
-10 - +10V
+
-
130B
B926
.10 Function Setting
6-10 Terminal 53Low Voltage
0.07 V*
6-11 Terminal 53High Voltage
10 V*
6-14 Terminal 53Low Ref./Feedb.Value
0 Hz
6-15 Terminal 53High Ref./Feedb.Value
50 Hz
* = Default Value
Notes/comments:D IN 37 is an option.
Table 6.3 Analog Speed Reference (Voltage)
Application Set-up Examples VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 29
6 6

Parameters
130B
B927
.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
4 - 20mA
+
-
Function Setting
6-12 Terminal 53Low Current
4 mA*
6-13 Terminal 53High Current
20 mA*
6-14 Terminal 53Low Ref./Feedb.Value
0 Hz
6-15 Terminal 53High Ref./Feedb.Value
50 Hz
* = Default Value
Notes/comments:D IN 37 is an option.
Table 6.4 Analog Speed Reference (Current)
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
≈ 5kΩ
130B
B683
.10 Function Setting
6-10 Terminal 53Low Voltage
0.07 V*
6-11 Terminal 53High Voltage
10 V*
6-14 Terminal 53Low Ref./Feedb.Value
0 Hz
6-15 Terminal 53High Ref./Feedb.Value
1500 Hz
* = Default Value
Notes/comments:D IN 37 is an option.
Table 6.5 Speed Reference (Using a Manual Potentiometer)
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B804
.10 Function Setting
5-10 Terminal 18Digital Input
[8] Start*
5-12 Terminal 27Digital Input
[19] FreezeReference
5-13 Terminal 29Digital Input
[21] SpeedUp
5-14 Terminal 32Digital Input
[22] SpeedDown
* = Default Value
Notes/comments:D IN 37 is an option.
Table 6.6 Speed Up/Down
S t a r t ( 1 8 )
F r e e z e r e f ( 2 7 )
S p e e d u p ( 2 9 )
S p e e d d o w n ( 3 2 )
S p e e d
R e f e r e n c e
130B
B840
.10
Illustration 6.1 Speed Up/Down
Application Set-up Examples VLT® AutomationDrive FC 301/302 Operating Instructions
30 MG33AO02 - Rev. 2013-11-07
66
6.1.3 Start/Stop
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B802
.10 Function Setting
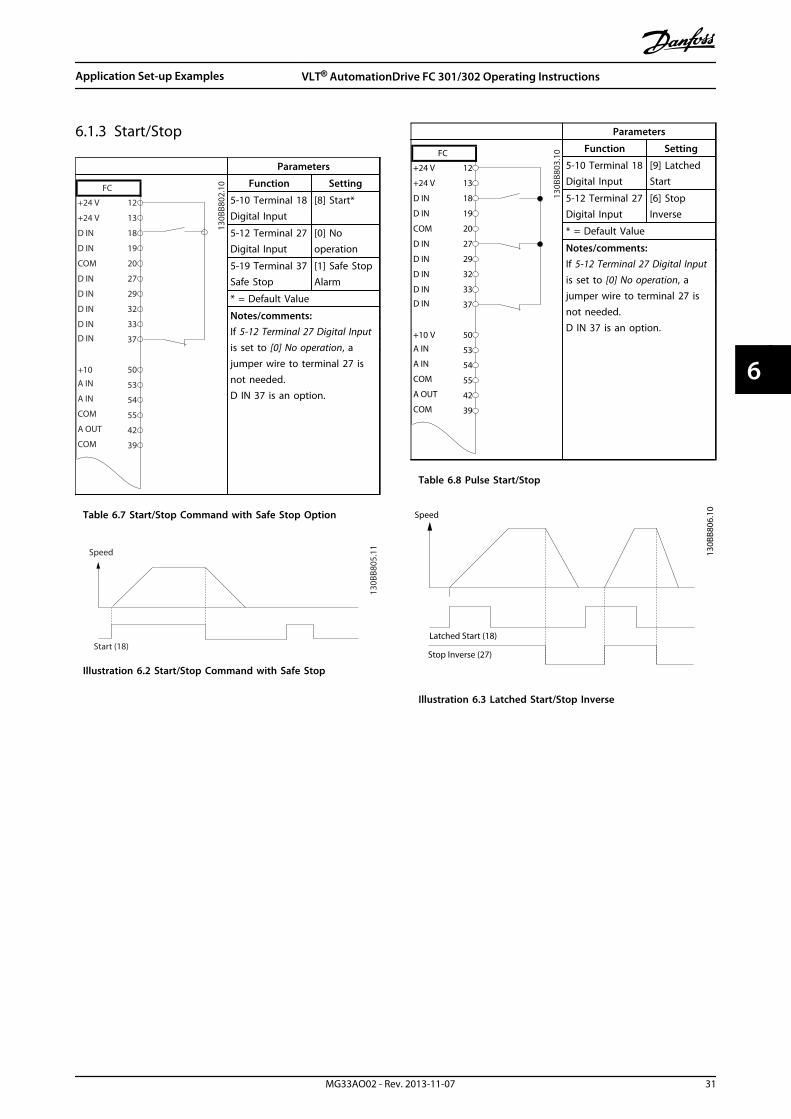
5-10 Terminal 18Digital Input
[8] Start*
5-12 Terminal 27Digital Input
[0] Nooperation
5-19 Terminal 37Safe Stop
[1] Safe StopAlarm
* = Default Value
Notes/comments:If 5-12 Terminal 27 Digital Inputis set to [0] No operation, ajumper wire to terminal 27 isnot needed.D IN 37 is an option.
Table 6.7 Start/Stop Command with Safe Stop Option
130B
B805
.11
Speed
Start (18)
Illustration 6.2 Start/Stop Command with Safe Stop
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B803
.10 Function Setting
5-10 Terminal 18Digital Input
[9] LatchedStart
5-12 Terminal 27Digital Input
[6] StopInverse
* = Default Value
Notes/comments:If 5-12 Terminal 27 Digital Inputis set to [0] No operation, ajumper wire to terminal 27 isnot needed.D IN 37 is an option.
Table 6.8 Pulse Start/Stop
Speed
130B
B806
.10
Latched Start (18)
Stop Inverse (27)
Illustration 6.3 Latched Start/Stop Inverse
Application Set-up Examples VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 31
6 6

Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B934
.10 Function Setting
5-10 Terminal 18Digital Input
[8] Start
5-11 Terminal 19Digital Input
[10]Reversing*
5-12 Terminal 27Digital Input
[0] Nooperation
5-14 Terminal 32Digital Input
[16] Presetref bit 0
5-15 Terminal 33Digital Input
[17] Presetref bit 1
3-10 PresetReference
Preset ref. 0Preset ref. 1Preset ref. 2Preset ref. 3
25%50%75%100%
* = Default Value
Notes/comments:D IN 37 is an option.
Table 6.9 Start/Stop with Reversing and 4 Preset Speeds
6.1.4 External Alarm Reset
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130B
B928
.10 Function Setting
5-11 Terminal 19Digital Input
[1] Reset
* = Default Value
Notes/comments:D IN 37 is an option.
Table 6.10 External Alarm Reset
6.1.5 RS-485
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
616869
RS-485
+
130B
B685
.10 Function Setting
8-30 Protocol FC*
8-31 Address 1*
8-32 Baud Rate 9600*
* = Default Value
Notes/comments:Select protocol, address andbaud rate in the abovementioned parameters.D IN 37 is an option.
Table 6.11 RS-485 Network Connection
Application Set-up Examples VLT® AutomationDrive FC 301/302 Operating Instructions
32 MG33AO02 - Rev. 2013-11-07
66

6.1.6 Motor Thermistor
CAUTIONTHERMISTOR INSULATIONRisk of equipment damage exists.
• Use only thermistors with reinforced or doubleinsulation to meet PELV insulationrequirements.
Parameters
130B
B686
.12
VLT
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
+10 VA IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
50
53
54
55
42
39
A53
U - I
D IN 37
Function Setting
1-90 MotorThermalProtection
[2]Thermistortrip
1-93 ThermistorSource
[1] Analoginput 53
* = Default Value
Notes/comments:If only a warning is desired,1-90 Motor Thermal Protectionshould be set to [1] Thermistorwarning.D IN 37 is an option.
Table 6.12 Motor Thermistor
6.1.7 SLC
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
0613
0BB8
39.1
0 Function Setting
4-30 MotorFeedback LossFunction
[1] Warning
4-31 MotorFeedback SpeedError
100 RPM
4-32 MotorFeedback LossTimeout
5 s
7-00 Speed PIDFeedback Source
[2] MCB 102
17-11 Resolution(PPR)
1024*
13-00 SLController Mode
[1] On
13-01 Start Event [19] Warning
13-02 Stop Event [44] Resetkey
13-10 ComparatorOperand
[21] Warningno.
13-11 ComparatorOperator
[1] ≈*
13-12 ComparatorValue
90
13-51 SLController Event
[22]Comparator0
13-52 SLController Action
[32] Setdigital out Alow
5-40 FunctionRelay
[80] SLdigitaloutput A
*=Default Value
Notes/comments:If the limit in the feedbackmonitor is exceeded, Warning90 is issued. The SLC monitorsWarning 90 and in the case thatWarning 90 becomes TRUE thenRelay 1 is triggered.External equipment may thenindicate that service may berequired. If the feedback errorgoes below the limit againwithin 5 s, the frequencyconverter continues and thewarning disappears. But Relay 1is still triggered until [Reset] onthe LCP.
Table 6.13 Using SLC to Set a Relay
Application Set-up Examples VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 33
6 6
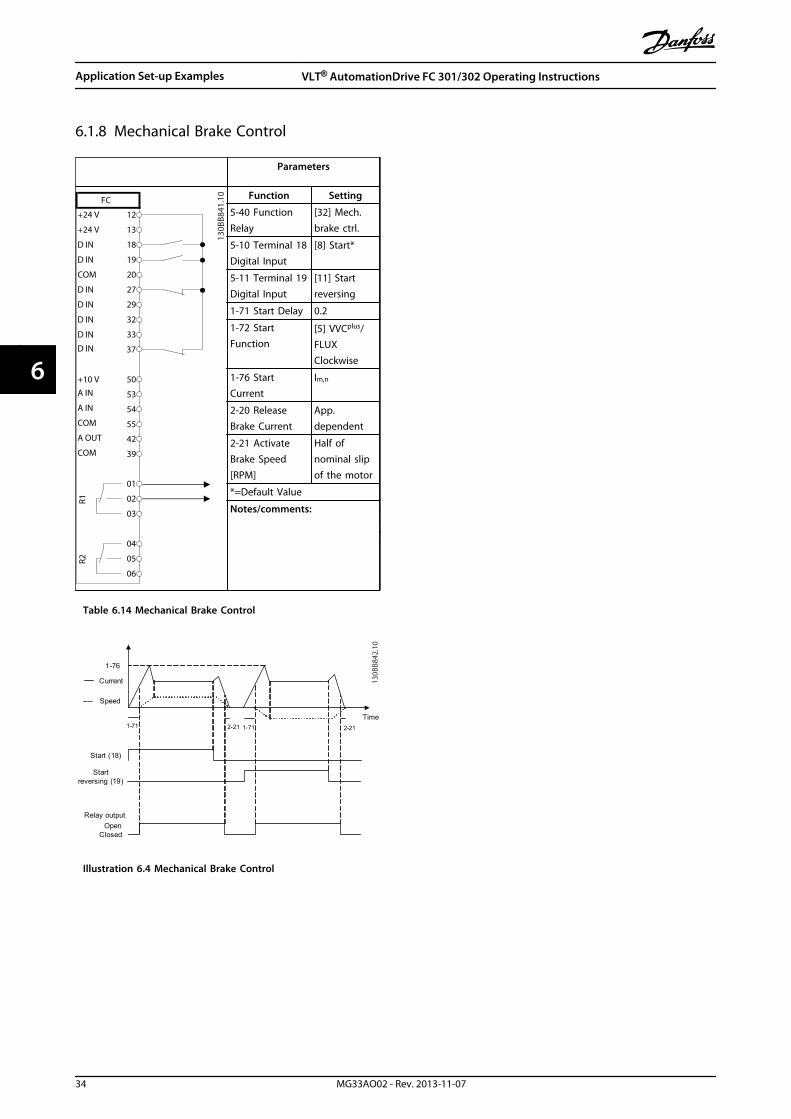
6.1.8 Mechanical Brake Control
Parameters
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130B
B841
.10 Function Setting
5-40 FunctionRelay
[32] Mech.brake ctrl.
5-10 Terminal 18Digital Input
[8] Start*
5-11 Terminal 19Digital Input
[11] Startreversing
1-71 Start Delay 0.2
1-72 StartFunction
[5] VVCplus/FLUXClockwise
1-76 StartCurrent
Im,n
2-20 ReleaseBrake Current
App.dependent
2-21 ActivateBrake Speed[RPM]
Half ofnominal slipof the motor
*=Default Value
Notes/comments:
Table 6.14 Mechanical Brake Control
Start (18)
Start reversing (19)
Relay output
Speed
Time
Current
1-71 1-712-21 2-21
1-76
OpenClosed
130B
B842
.10
Illustration 6.4 Mechanical Brake Control
Application Set-up Examples VLT® AutomationDrive FC 301/302 Operating Instructions
34 MG33AO02 - Rev. 2013-11-07
66

7 Maintenance, Diagnostics and Troubleshooting
This chapter includes maintenance and service guidelines,status messages, warnings and alarms and basic trouble-shooting.
7.1 Maintenance and Service
Under normal operating conditions and load profiles, thefrequency converter is maintenance-free throughout itsdesigned lifetime. To prevent breakdown, danger, anddamage, examine the frequency converter at regularintervals depending on the operating conditions. Replaceworn or damaged parts with original spare parts orstandard parts. For service and support, refer towww.danfoss.com/contact/sales_and_services/.
WARNINGHIGH VOLTAGEFrequency converters contain high voltage whenconnected to AC mains input power. Failure to performinstallation, start-up, and maintenance by qualifiedpersonnel could result in death or serious injury.
• Installation, start-up, and maintenance must beperformed by qualified personnel only.
7.2 Status Messages
When the frequency converter is in status mode, statusmessages are generated automatically and appear in thebottom line of the display (see Illustration 7.1).
Status799RPM 7.83A 36.4kW
0.000
53.2%
1(1)
AutoHandO
RemoteLocal
RampingStopRunningJogging...Stand by
130B
B037
.11
1 2 3
1 Operation mode (see Table 7.2)
2 Reference site (see Table 7.3)
3 Operation status (see Table 7.4)
Illustration 7.1 Status Display
Table 7.2 to Table 7.4 describe the displayed statusmessages.
Off The frequency converter does not react to anycontrol signal until [Auto On] or [Hand On] ispressed.
Auto On The frequency converter is controlled from thecontrol terminals and/or the serial communi-cation.
Hand On The frequency converter is controlled by thenavigation keys on the LCP. Stop commands,reset, reversing, DC brake, and other signalsapplied to the control terminals override localcontrol.
Table 7.1 Operation Mode
Remote The speed reference is given from externalsignals, serial communication, or internalpreset references.
Local The frequency converter uses [Hand On]control or reference values from the LCP.
Table 7.2 Reference Site
AC Brake AC Brake was selected in 2-10 Brake Function.The AC brake over-magnetises the motor toachieve a controlled slow-down.
AMA finish OK Automatic motor adaptation (AMA) wascarried out successfully.
AMA ready AMA is ready to start. Press [Hand On] to start.
AMA running AMA process is in progress.
Braking The brake chopper is in operation. Generativeenergy is absorbed by the brake resistor.
Braking max. The brake chopper is in operation. The powerlimit for the brake resistor defined in2-12 Brake Power Limit (kW) has been reached.
Coast • Coast inverse was selected as a functionfor a digital input (parameter group 5-1*Digital Inputs). The corresponding terminalis not connected.
• Coast activated by serial communication
Ctrl. Ramp-down Control Ramp-down was selected in14-10 Mains Failure.
• The mains voltage is below the value setin 14-11 Mains Voltage at Mains Fault atmains fault
• The frequency converter ramps down themotor using a controlled ramp down
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 35
7 7

Current High The frequency converter output current isabove the limit set in 4-51 Warning CurrentHigh.
Current Low The frequency converter output current isbelow the limit set in 4-52 Warning Speed Low
DC Hold DC hold is selected in 1-80 Function at Stopand a stop command is active. The motor isheld by a DC current set in 2-00 DC Hold/Preheat Current.
DC Stop The motor is held with a DC current (2-01 DCBrake Current) for a specified time (2-02 DCBraking Time).
• DC Brake is activated in 2-03 DC Brake CutIn Speed [RPM] and a stop command isactive.
• DC Brake (inverse) is selected as a functionfor a digital input (parameter group 5-1*Digital Inputs). The corresponding terminalis not active.
• The DC Brake is activated via serialcommunication.
Feedback high The sum of all active feedbacks is above thefeedback limit set in 4-57 Warning FeedbackHigh.
Feedback low The sum of all active feedbacks is below thefeedback limit set in 4-56 Warning FeedbackLow.
Freeze output The remote reference is active, which holdsthe present speed.
• Freeze output was selected as a functionfor a digital input (parameter group 5-1*Digital Inputs). The corresponding terminalis active. Speed control is only possible viathe terminal functions Speed Up andSpeed Down.
• Hold ramp is activated via serial communi-cation.
Freeze outputrequest
A freeze output command was given, but themotor remains stopped until a run permissivesignal is received.
Freeze ref. Freeze Reference was selected as a function fora digital input (parameter group 5-1* DigitalInputs). The corresponding terminal is active.The frequency converter saves the actualreference. Changing the reference is now onlypossible via terminal functions Speed Up andSpeed Down.
Jog request A jog command was given, but the motorremains stopped until a run permissive signalis received via a digital input.
Jogging The motor is running as programmed in3-19 Jog Speed [RPM].
• Jog was selected as function for a digitalinput (parameter group 5-1* Digital Inputs).The corresponding terminal (e.g. Terminal29) is active.
• The Jog function is activated via the serialcommunication.
• The Jog function was selected as areaction for a monitoring function (e.g. Nosignal). The monitoring function is active.
Motor check In 1-80 Function at Stop, Motor Check wasselected. A stop command is active. To ensurethat a motor is connected to the frequencyconverter, a permanent test current is appliedto the motor.
OVC control Overvoltage control was activated in 2-17 Over-voltage Control, [2] Enabled. The connectedmotor supplies the frequency converter withgenerative energy. The overvoltage controladjusts the V/Hz ratio to run the motor incontrolled mode and to prevent the frequencyconverter from tripping.
PowerUnit Off (Only frequency converters with an external24 V power supply installed).Mains supply to the frequency converter wasremoved, and the control card is supplied bythe external 24 V.
Protection md Protection mode is active. The unit hasdetected a critical status (overcurrent orovervoltage).
• To avoid tripping, switching frequency isreduced to 4 kHz.
• If possible, protection mode ends afterapproximately 10 s.
• Protection mode can be restricted in14-26 Trip Delay at Inverter Fault.
QStop The motor is decelerating using 3-81 QuickStop Ramp Time.
• Quick stop inverse was selected as afunction for a digital input (parametergroup 5-1* Digital Inputs). Thecorresponding terminal is not active.
• The quick stop function was activated viaserial communication.
Ramping The motor is accelerating/decelerating usingthe active Ramp Up/Down. The reference, alimit value, or a standstill is not yet reached.
Ref. high The sum of all active references is above thereference limit set in 4-55 Warning ReferenceHigh.
Ref. low The sum of all active references is below thereference limit set in 4-54 Warning ReferenceLow.
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
36 MG33AO02 - Rev. 2013-11-07
77

Run on ref. The frequency converter is running in thereference range. The feedback value matchesthe setpoint value.
Run request A start command was given, but the motorremains stopped until a run permissive signalis received via digital input.
Running The motor is driven by the frequencyconverter.
Sleep Mode The energy-saving function is enabled. Themotor has stopped, but restarts automaticallywhen required.
Speed high Motor speed is above the value set in4-53 Warning Speed High.
Speed low Motor speed is below the value set in4-52 Warning Speed Low.
Standby In Auto On mode, the frequency converterstarts the motor with a start signal from adigital input or serial communication.
Start delay In 1-71 Start Delay, a delay starting time wasset. A start command is activated and themotor starts after the start delay time expires.
Start fwd/rev Start forward and start reverse were selectedas functions for 2 different digital inputs(parameter group 5-1* Digital Inputs). Themotor starts in forward or reverse dependingon which corresponding terminal is activated.
Stop The frequency converter has received a stopcommand from the LCP, digital input, or serialcommunication.
Trip An alarm occurred and the motor is stopped.Once the cause of the alarm is cleared, thefrequency converter can be reset manually bypressing [Reset] or remotely by controlterminals or serial communication.
Trip lock An alarm occurred and the motor is stopped.Once the cause of the alarm is cleared, powermust be cycled to the frequency converter.The frequency converter can then be resetmanually by pressing [Reset] or remotely bycontrol terminals or serial communication.
Table 7.3 Operation Status
NOTICEIn auto/remote mode, the frequency converter requiresexternal commands to execute functions.
7.3 Warning and Alarm Types
WarningsA warning is issued when an alarm condition is impendingor when an abnormal operating condition is present andmay result in the frequency converter issuing an alarm. Awarning clears by itself when the abnormal condition isremoved.
AlarmsTripAn alarm is issued when the frequency converter istripped, which means that the frequency convertersuspends operation to prevent frequency converter orsystem damage. The motor coasts to a stop. The frequencyconverter logic continues to operate and monitor thefrequency converter status. After the fault condition isremedied, the frequency converter can be reset. It is thenready to start operation again.
Resetting the frequency converter after trip/trip lockA trip can be reset in any of 4 ways:
• Press [Reset] on the LCP
• Digital reset input command
• Serial communication reset input command
• Auto reset
Trip lockInput power is cycled. The motor coasts to a stop. Thefrequency converter continues to monitor the frequencyconverter status. Remove input power to the frequencyconverter, correct the cause of the fault, and reset thefrequency converter.
Warning and Alarm Displays
• A warning is displayed in the LCP along with thewarning number.
• An alarm flashes along with the alarm number.
130B
P086
.11
Status0.0Hz 0.000kW 0.00A
0.0Hz0
Earth Fault [A14]Auto Remote Trip
1(1)
Illustration 7.2 Alarm Display Example
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 37
7 7
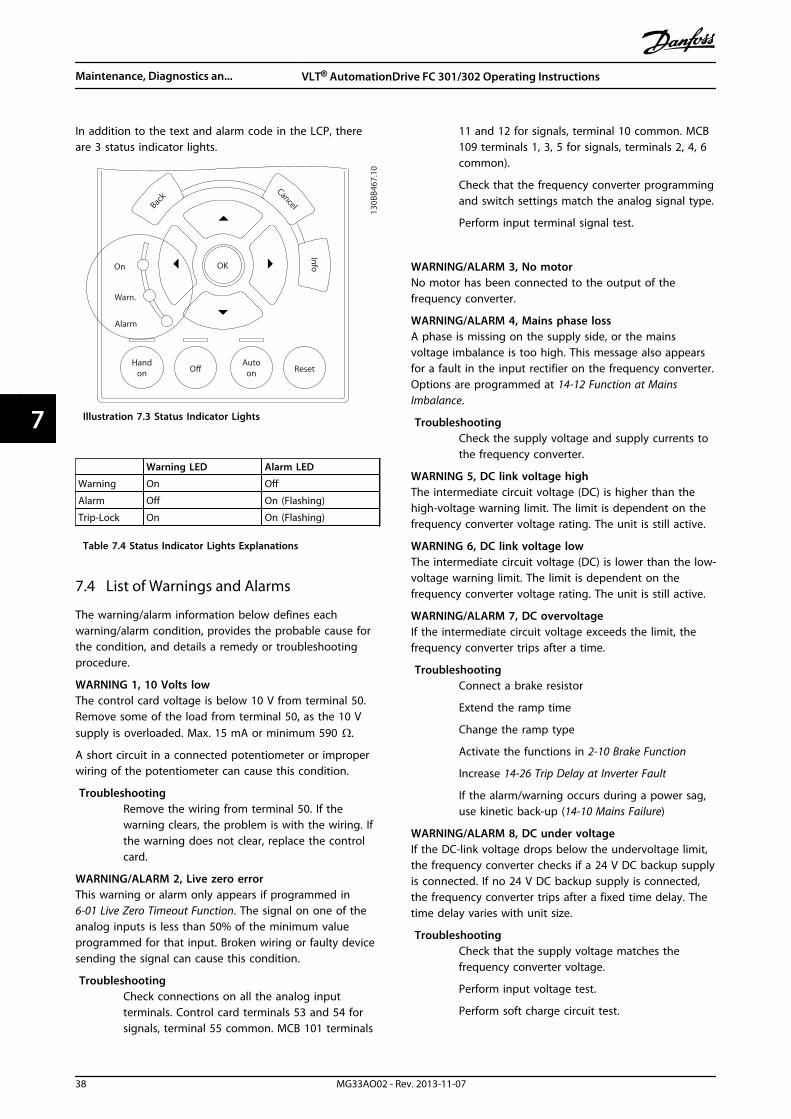
In addition to the text and alarm code in the LCP, thereare 3 status indicator lights.
Autoon Reset
Handon Off
Back
Cancel
InfoOKOn
Alarm
Warn.
130B
B467
.10
Illustration 7.3 Status Indicator Lights
Warning LED Alarm LED
Warning On Off
Alarm Off On (Flashing)
Trip-Lock On On (Flashing)
Table 7.4 Status Indicator Lights Explanations
7.4 List of Warnings and Alarms
The warning/alarm information below defines eachwarning/alarm condition, provides the probable cause forthe condition, and details a remedy or troubleshootingprocedure.
WARNING 1, 10 Volts lowThe control card voltage is below 10 V from terminal 50.Remove some of the load from terminal 50, as the 10 Vsupply is overloaded. Max. 15 mA or minimum 590 Ω.
A short circuit in a connected potentiometer or improperwiring of the potentiometer can cause this condition.
TroubleshootingRemove the wiring from terminal 50. If thewarning clears, the problem is with the wiring. Ifthe warning does not clear, replace the controlcard.
WARNING/ALARM 2, Live zero errorThis warning or alarm only appears if programmed in6-01 Live Zero Timeout Function. The signal on one of theanalog inputs is less than 50% of the minimum valueprogrammed for that input. Broken wiring or faulty devicesending the signal can cause this condition.
TroubleshootingCheck connections on all the analog inputterminals. Control card terminals 53 and 54 forsignals, terminal 55 common. MCB 101 terminals
11 and 12 for signals, terminal 10 common. MCB109 terminals 1, 3, 5 for signals, terminals 2, 4, 6common).
Check that the frequency converter programmingand switch settings match the analog signal type.
Perform input terminal signal test.
WARNING/ALARM 3, No motorNo motor has been connected to the output of thefrequency converter.
WARNING/ALARM 4, Mains phase lossA phase is missing on the supply side, or the mainsvoltage imbalance is too high. This message also appearsfor a fault in the input rectifier on the frequency converter.Options are programmed at 14-12 Function at MainsImbalance.
TroubleshootingCheck the supply voltage and supply currents tothe frequency converter.
WARNING 5, DC link voltage highThe intermediate circuit voltage (DC) is higher than thehigh-voltage warning limit. The limit is dependent on thefrequency converter voltage rating. The unit is still active.
WARNING 6, DC link voltage lowThe intermediate circuit voltage (DC) is lower than the low-voltage warning limit. The limit is dependent on thefrequency converter voltage rating. The unit is still active.
WARNING/ALARM 7, DC overvoltageIf the intermediate circuit voltage exceeds the limit, thefrequency converter trips after a time.
TroubleshootingConnect a brake resistor
Extend the ramp time
Change the ramp type
Activate the functions in 2-10 Brake Function
Increase 14-26 Trip Delay at Inverter Fault
If the alarm/warning occurs during a power sag,use kinetic back-up (14-10 Mains Failure)
WARNING/ALARM 8, DC under voltageIf the DC-link voltage drops below the undervoltage limit,the frequency converter checks if a 24 V DC backup supplyis connected. If no 24 V DC backup supply is connected,the frequency converter trips after a fixed time delay. Thetime delay varies with unit size.
TroubleshootingCheck that the supply voltage matches thefrequency converter voltage.
Perform input voltage test.
Perform soft charge circuit test.
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
38 MG33AO02 - Rev. 2013-11-07
77

WARNING/ALARM 9, Inverter overloadThe frequency converter is about to cut out because of anoverload (too high current for too long). The counter forelectronic, thermal inverter protection issues a warning at98% and trips at 100%, while giving an alarm. Thefrequency converter cannot be reset until the counter isbelow 90%. The fault is that the frequency converter has run withmore than 100% overload for too long.
TroubleshootingCompare the output current shown on the LCPwith the frequency converter rated current.
Compare the output current shown on the LCPwith measured motor current.
Display the thermal drive load on the LCP andmonitor the value. When running above thefrequency converter continuous current rating,the counter increases. When running below thefrequency converter continuous current rating,the counter decreases.
WARNING/ALARM 10, Motor overload temperatureAccording to the electronic thermal protection (ETR), themotor is too hot. Select whether the frequency converterissues a warning or an alarm when the counter reaches100% in 1-90 Motor Thermal Protection. The fault occurswhen the motor runs with more than 100% overload fortoo long.
TroubleshootingCheck for motor overheating.
Check if the motor is mechanically overloaded
Check that the motor current set in 1-24 MotorCurrent is correct.
Ensure that Motor data in parameters 1-20 to1-25 are set correctly.
If an external fan is in use, check in 1-91 MotorExternal Fan that it is selected.
Running AMA in 1-29 Automatic Motor Adaptation(AMA) tunes the frequency converter to themotor more accurately and reduces thermalloading.
WARNING/ALARM 11, Motor thermistor over tempCheck whether the thermistor is disconnected. Selectwhether the frequency converter issues a warning or analarm in 1-90 Motor Thermal Protection.
TroubleshootingCheck for motor overheating.
Check if the motor is mechanically overloaded.
When using terminal 53 or 54, check that thethermistor is connected correctly between eitherterminal 53 or 54 (analog voltage input) andterminal 50 (+10 V supply). Also check that the
terminal switch for 53 or 54 is set for voltage.Check 1-93 Thermistor Source selects terminal 53or 54.
When using digital inputs 18 or 19, check thatthe thermistor is connected correctly betweeneither terminal 18 or 19 (digital input PNP only)and terminal 50. Check 1-93 Thermistor Sourceselects terminal 18 or 19.
WARNING/ALARM 12, Torque limitThe torque has exceeded the value in 4-16 Torque LimitMotor Mode or the value in 4-17 Torque Limit GeneratorMode. 14-25 Trip Delay at Torque Limit can change thiswarning from a warning-only condition to a warningfollowed by an alarm.
TroubleshootingIf the motor torque limit is exceeded during rampup, extend the ramp up time.
If the generator torque limit is exceeded duringramp down, extend the ramp down time.
If torque limit occurs while running, possiblyincrease the torque limit. Make sure that thesystem can operate safely at a higher torque.
Check the application for excessive current drawon the motor.
WARNING/ALARM 13, Over currentThe inverter peak current limit (approximately 200% of therated current) is exceeded. The warning lasts about 1.5 s,then the frequency converter trips and issues an alarm.Shock loading or quick acceleration with high inertia loadscan cause this fault. If the acceleration during ramp up isquick, the fault can also appear after kinetic back-up. Ifextended mechanical brake control is selected, trip can bereset externally.
TroubleshootingRemove power and check if the motor shaft canbe turned.
Check that the motor size matches the frequencyconverter.
Check parameters 1-20 to 1-25 for correct motordata.
ALARM 14, Earth (ground) faultThere is current from the output phases to ground, eitherin the cable between the frequency converter and themotor or in the motor itself.
TroubleshootingRemove power to the frequency converter andrepair the earth fault.
Check for earth faults in the motor by measuringthe resistance to ground of the motor leads andthe motor with a megohmmeter.
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 39
7 7

ALARM 15, Hardware mismatchA fitted option is not operational with the present controlboard hardware or software.
Record the value of the following parameters and contactDanfoss:
15-40 FC Type
15-41 Power Section
15-42 Voltage
15-43 Software Version
15-45 Actual Typecode String
15-49 SW ID Control Card
15-50 SW ID Power Card
15-60 Option Mounted
15-61 Option SW Version (for each option slot)
ALARM 16, Short circuitThere is short-circuiting in the motor or motor wiring.
Remove power to the frequency converter and repair theshort circuit.
WARNING/ALARM 17, Control word timeoutThere is no communication to the frequency converter.The warning is only active when 8-04 Control Word TimeoutFunction is NOT set to [0] Off.If 8-04 Control Word Timeout Function is set to [5] Stop andTrip, a warning appears and the frequency converter rampsdown until it stops then displays an alarm.
TroubleshootingCheck connections on the serial communicationcable.
Increase 8-03 Control Word Timeout Time
Check the operation of the communicationequipment.
Verify a proper installation based on EMCrequirements.
WARNING/ALARM 20, Temp. input errorThe temperature sensor is not connected.
WARNING/ALARM 21, Parameter errorThe parameter is out of range. The parameter number isreported in the LCP. The affected parameter must be set toa valid value.
WARNING/ALARM 22, Hoist mechanical brakeReport value shows what kind it is.0 = The torque ref. was not reached before time out(Parameter 2-27).1 = Expected brake feedback not received before time out(Parameters 2-23, 2-25).
WARNING 23, Internal fan faultThe fan warning function is an extra protective functionthat checks if the fan is running/mounted. The fan warningcan be disabled in 14-53 Fan Monitor ([0] Disabled).
For the D, E, and F Frame filters, the regulated voltage tothe fans is monitored.
TroubleshootingCheck for proper fan operation.
Cycle power to the frequency converter andcheck that the fan operates briefly at start-up.
Check the sensors on the heat sink and controlcard.
WARNING 24, External fan faultThe fan warning function is an extra protective functionthat checks if the fan is running/mounted. The fan warningcan be disabled in 14-53 Fan Monitor ([0] Disabled).
TroubleshootingCheck for proper fan operation.
Cycle power to the frequency converter andcheck that the fan operates briefly at start-up.
Check the sensors on the heat sink and controlcard.
WARNING 25, Brake resistor short circuitThe brake resistor is monitored during operation. If a shortcircuit occurs, the brake function is disabled and thewarning appears. The frequency converter is stilloperational, but without the brake function. Removepower to the frequency converter and replace the brakeresistor (see 2-15 Brake Check).
WARNING/ALARM 26, Brake resistor power limitThe power transmitted to the brake resistor is calculated asa mean value over the last 120 s of run time. Thecalculation is based on the intermediate circuit voltage andthe brake resistance value set in 2-16 AC brake Max.Current. The warning is active when the dissipated brakingpower is higher than 90% of the brake resistance power. If[2] Trip is selected in 2-13 Brake Power Monitoring, thefrequency converter trips when the dissipated brakingpower reaches 100%.
WARNING/ALARM 27, Brake chopper faultThe brake transistor is monitored during operation and if ashort circuit occurs, the brake function is disabled and awarning is issued. The frequency converter is stilloperational but, since the brake transistor has short-circuited, substantial power is transmitted to the brakeresistor, even if it is inactive.Remove power to the frequency converter and remove thebrake resistor.
WARNING/ALARM 28, Brake check failedThe brake resistor is not connected or not working.Check 2-15 Brake Check.
ALARM 29, Heat Sink tempThe maximum temperature of the heat sink has beenexceeded. The temperature fault does not reset until thetemperature falls below a defined heatsink temperature.The trip and reset points are different based on thefrequency converter power size.
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
40 MG33AO02 - Rev. 2013-11-07
77

TroubleshootingCheck for the following conditions.
Ambient temperature too high.
Motor cable too long.
Incorrect airflow clearance above and below thefrequency converter.
Blocked airflow around the frequency converter.
Damaged heatsink fan.
Dirty heat sink.
ALARM 30, Motor phase U missingMotor phase U between the frequency converter and themotor is missing.
Remove power from the frequency converter and checkmotor phase U.
ALARM 31, Motor phase V missingMotor phase V between the frequency converter and themotor is missing.
Remove power from the frequency converter and checkmotor phase V.
ALARM 32, Motor phase W missingMotor phase W between the frequency converter and themotor is missing.
Remove power from the frequency converter and checkmotor phase W.
ALARM 33, Inrush faultToo many power-ups have occurred within a short timeperiod. Let the unit cool to operating temperature.
WARNING/ALARM 34, Fieldbus communication faultThe fieldbus on the communication option card is notworking.
WARNING/ALARM 35, Option faultAn option alarm is received. The alarm is option-specific.The most likely cause is a power-up or a communicationfault.
WARNING/ALARM 36, Mains failureThis warning/alarm is only active if the supply voltage tothe frequency converter is lost and 14-10 Mains Failure isnot set to [0] No Function. Check the fuses to thefrequency converter and mains supply to the unit.
ALARM 37, Phase imbalanceThere is a current imbalance between the power units
ALARM 38, Internal faultWhen an internal fault occurs, a code number defined inTable 7.6 is displayed.
TroubleshootingCycle power
Check that the option is properly installed
Check for loose or missing wiring
It may be necessary to contact your Danfoss supplier orservice department. Note the code number for furthertroubleshooting directions.
No. Text0 Serial port cannot be initialised. Contact your
Danfoss supplier or Danfoss Service Department.
256-258 Power EEPROM data is defective or too old.Replace power card.
512-519 Internal fault. Contact your Danfoss supplier orDanfoss Service Department.
783 Parameter value outside of min/max limits
1024-1284 Internal fault. Contact your Danfoss supplier or theDanfoss Service Department.
1299 Option SW in slot A is too old
1300 Option SW in slot B is too old
1302 Option SW in slot C1 is too old
1315 Option SW in slot A is not supported (not allowed)
1316 Option SW in slot B is not supported (not allowed)
1318 Option SW in slot C1 is not supported (notallowed)
1379-2819 Internal fault. Contact your Danfoss supplier orDanfoss Service Department.
1792 HW reset of DSP
1793 Motor derived parameters not transferred correctlyto DSP
1794 Power data not transferred correctly at power upto DSP
1795 The DSP has received too many unknown SPItelegrams
1796 RAM copy error
2561 Replace control card
2820 LCP stack overflow
2821 Serial port overflow
2822 USB port overflow
3072-5122 Parameter value is outside its limits
5123 Option in slot A: Hardware incompatible withcontrol board hardware
5124 Option in slot B: Hardware incompatible withcontrol board hardware
5125 Option in slot C0: Hardware incompatible withcontrol board hardware
5126 Option in slot C1: Hardware incompatible withcontrol board hardware
5376-6231 Internal fault. Contact your Danfoss supplier orDanfoss Service Department.
Table 7.5 Internal Fault Codes
ALARM 39, Heat Sink sensorNo feedback from the heat sink temperature sensor.
The signal from the IGBT thermal sensor is not available onthe power card. The problem could be on the power card,on the gate drive card, or the ribbon cable between thepower card and gate drive card.
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 41
7 7

WARNING 40, Overload of digital output terminal 27Check the load connected to terminal 27 or remove short-circuit connection. Check 5-00 Digital I/O Mode and5-01 Terminal 27 Mode.
WARNING 41, Overload of digital output terminal 29Check the load connected to terminal 29 or remove short-circuit connection. Check 5-00 Digital I/O Mode and5-02 Terminal 29 Mode.
WARNING 42, Overload of digital output on X30/6 oroverload of digital output on X30/7For X30/6, check the load connected to X30/6 or removethe short-circuit connection. Check 5-32 Term X30/6 DigiOut (MCB 101).
For X30/7, check the load connected to X30/7 or removethe short-circuit connection. Check 5-33 Term X30/7 DigiOut (MCB 101).
ALARM 43, Ext. supplyMCB 113 Ext. Relay Option is mounted without ext. 24 VDC. Either connect an ext. 24 V DC supply or specify thatno external supply is used via 14-80 Option Supplied byExternal 24VDC [0]. A change in 14-80 Option Supplied byExternal 24VDC requires a power cycle.
ALARM 45, Earth fault 2Ground fault.
TroubleshootingCheck for proper grounding and looseconnections.
Check for proper wire size.
Check motor cables for short-circuits or leakagecurrents.
ALARM 46, Power card supplyThe supply on the power card is out of range.
There are 3 power supplies generated by the switch modepower supply (SMPS) on the power card: 24 V, 5 V, ±18 V.When powered with 24 V DC with the MCB 107 option,only the 24 V and 5 V supplies are monitored. Whenpowered with 3-phase mains voltage, all 3 supplies aremonitored.
TroubleshootingCheck for a defective power card.
Check for a defective control card.
Check for a defective option card.
If a 24 V DC power supply is used, verify propersupply power.
WARNING 47, 24 V supply lowThe 24 V DC is measured on the control card. The external24 V DC back-up power supply may be overloaded,otherwise contact the Danfoss supplier.
WARNING 48, 1.8 V supply lowThe 1.8 V DC supply used on the control card is outside ofallowable limits. The power supply is measured on thecontrol card. Check for a defective control card. If anoption card is present, check for an overvoltage condition.
WARNING 49, Speed limitWhen the speed is not within the specified range in4-11 Motor Speed Low Limit [RPM] and 4-13 Motor SpeedHigh Limit [RPM], the frequency converter shows a warning.When the speed is below the specified limit in 1-86 TripSpeed Low [RPM] (except when starting or stopping), thefrequency converter trips.
ALARM 50, AMA calibration failedContact Danfoss supplier or Danfoss service department.
ALARM 51, AMA check Unom and Inom
The settings for motor voltage, motor current and motorpower are wrong. Check the settings in parameters 1-20 to1-25.
ALARM 52, AMA low Inom
The motor current is too low. Check the settings.
ALARM 53, AMA motor too bigThe motor is too big for the AMA to operate.
ALARM 54, AMA motor too smallThe motor is too small for the AMA to operate.
ALARM 55, AMA parameter out of rangeThe parameter values of the motor are outside of theacceptable range. AMA cannot run.
ALARM 56, AMA interrupted by userThe user has interrupted the AMA.
ALARM 57, AMA internal faultTry to restart AMA again. Repeated restarts can over heatthe motor.
ALARM 58, AMA Internal faultContact the Danfoss supplier.
WARNING 59, Current limitThe current is higher than the value in 4-18 Current Limit.Ensure that motor data in parameters 1–20 to 1–25 are setcorrectly. Possibly increase the current limit. Be sure thatthe system can operate safely at a higher limit.
WARNING 60, External interlockA digital input signal is indicating a fault condition externalto the frequency converter. An external interlock hascommanded the frequency converter to trip. Clear theexternal fault condition. To resume normal operation,apply 24 V DC to the terminal programmed for externalinterlock. Reset the frequency converter.
WARNING/ALARM 61, Feedback errorAn error between calculated speed and speedmeasurement from feedback device. The function Warning/Alarm/Disabling setting is in 4-30 Motor Feedback LossFunction. Accepted error setting in 4-31 Motor FeedbackSpeed Error and the allowed time the error occur setting in
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
42 MG33AO02 - Rev. 2013-11-07
77

4-32 Motor Feedback Loss Timeout. During a commissioningprocedure the function may be effective.
WARNING 62, Output frequency at maximum limitThe output frequency has reached the value set in4-19 Max Output Frequency. Check the application todetermine the cause. Possibly increase the outputfrequency limit. Be sure the system can operate safely at ahigher output frequency. The warning clears when theoutput drops below the maximum limit.
ALARM 63, Mechanical brake lowThe actual motor current has not exceeded the “releasebrake” current within the “start delay” time window.
ALARM 64, Voltage LimitThe load and speed combination demands a motorvoltage higher than the actual DC-link voltage.
WARNING/ALARM 65, Control card over temperatureThe cut-out temperature of the control card is 80 °C.
Troubleshooting• Check that the ambient operating temperature is
within limits
• Check for clogged filters
• Check fan operation
• Check the control card
WARNING 66, Heat sink temperature lowThe frequency converter is too cold to operate. Thiswarning is based on the temperature sensor in the IGBTmodule.Increase the ambient temperature of the unit. Also, atrickle amount of current can be supplied to the frequencyconverter whenever the motor is stopped by setting2-00 DC Hold/Preheat Current at 5% and 1-80 Function atStop
ALARM 67, Option module configuration has changedOne or more options have either been added or removedsince the last power-down. Check that the configurationchange is intentional and reset the unit.
ALARM 68, Safe Stop activatedSafe Torque Off has been activated. To resume normaloperation, apply 24 V DC to terminal 37, then send a resetsignal (via bus, digital I/O, or by pressing [Reset]).
ALARM 69, Power card temperatureThe temperature sensor on the power card is either toohot or too cold.
TroubleshootingCheck that the ambient operating temperature iswithin limits.
Check for clogged filters.
Check fan operation.
Check the power card.
ALARM 70, Illegal FC configurationThe control card and power card are incompatible. Tocheck compatibility, contact the Danfoss supplier with thetype code of the unit from the nameplate and the partnumbers of the cards.
ALARM 71, PTC 1 safe stopSafe Torque Off has been activated from the PTCThermistor Card MCB 112 (motor too warm). Normaloperation can be resumed when the MCB 112 applies 24 VDC to Terminal 37 again (when the motor temperaturereaches an acceptable level) and when the Digital Inputfrom the MCB 112 is deactivated. When that happens, areset signal must be is be sent (via Bus, Digital I/O, or bypressing [Reset]).
ALARM 72, Dangerous failureSafe Torque Off with trip lock. An unexpected combinationof Safe Torque Off commands has occurred:
• MCB 112 VLT PTC Thermistor Card enablesX44/10, but safe stop is not enabled.
• MCB 112 is the only device using Safe Torque Off(specified through selection [4] or [5] in5-19 Terminal 37 Safe Stop), Safe Torque Off isactivated, and X44/10 is not activated.
WARNING 73, Safe Stop auto restartSafe stopped. With automatic restart enabled, the motorcould start when the fault is cleared.
ALARM 74, PTC ThermistorAlarm related to the ATEX option. The PTC is not working.
ALARM 75, Illegal profile sel.Parameter value must not be written while motor isrunning. Stop motor before writing MCO profile to8-10 Control Word Profile for instance.
WARNING 76, Power unit setupThe required number of power units does not match thedetected number of active power units.
WARNING 77, Reduced power modeThe frequency converter is operating in reduced powermode (less than the allowed number of inverter sections).This warning is generated on power cycle when thefrequency converter is set to run with fewer inverters, andremains on.
ALARM 78, Tracking errorThe difference between set point value and actual valuehas exceeded the value in 4-35 Tracking Error. Disable thefunction by 4-34 Tracking Error Function or select an alarm/warning also in 4-34 Tracking Error Function. Investigate themechanics around the load and motor, check feedbackconnections from motor – encoder – to frequencyconverter. Select motor feedback function in 4-30 MotorFeedback Loss Function. Adjust tracking error band in4-35 Tracking Error and 4-37 Tracking Error Ramping.
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 43
7 7

ALARM 79, Illegal power section configurationThe scaling card has an incorrect part number or is notinstalled. The MK102 connector on the power card couldnot be installed.
ALARM 80, Drive initialised to default valueParameter settings are initialised to default settings after amanual reset. To clear the alarm, reset the unit.
ALARM 81, CSIV corruptCSIV file has syntax errors.
ALARM 82, CSIV parameter errorCSIV failed to init a parameter.
ALARM 83, Illegal option combinationThe mounted options are incompatible.
ALARM 84, No safety optionThe safety option was removed without applying a generalreset. Reconnect the safety option.
ALARM 88, Option detectionA change in the option layout was detected. 14-89 OptionDetection is set to [0] Frozen configuration and the optionlayout has been changed.
• To apply the change, enable option layoutchanges in 14-89 Option Detection.
• Alternatively, restore the correct option configu-ration.
WARNING 89, Mechanical brake slidingThe hoist brake monitor has detected a motor speed > 10RPM.
ALARM 90, Feedback monitorCheck the connection to encoder/resolver option andeventually replace the MCB 102 or MCB 103.
ALARM 91, Analog input 54 wrong settingsSwitch S202 has to be set in position OFF (voltage input)when a KTY sensor is connected to analog input terminal54.
ALARM 99, Locked rotorRotor is blocked.
WARNING/ALARM 104, Mixing fan faultThe fan is not operating. The fan monitor checks that thefan is spinning at power-up or whenever the mixing fan isturned on. The mixing-fan fault can be configured as awarning or an alarm trip by 14-53 Fan Monitor.
TroubleshootingCycle power to the frequency converter todetermine if the warning/alarm returns.
WARNING/ALARM 122, Mot. rotat. unexp.Frequency converter is performing a function that requiresthe motor to be at standstill, e.g. DC hold for PM motors.
WARNING 163, ATEX ETR cur.lim.warningThe frequency converter has run above the characteristiccurve for more than 50 s. The warning is activated at 83%and de-activated at 65% of the permitted thermaloverload.
ALARM 164, ATEX ETR cur.lim.alarmOperating above the characteristic curve for more than 60s within a period of 600 s activates the alarm and thefrequency converter trips.
WARNING 165, ATEX ETR freq.lim.warningThe frequency converter is running more than 50 s belowthe permitted minimum frequency (1-98 ATEX ETR interpol.points freq. [0]).
ALARM 166, ATEX ETR freq.lim.alarmThe frequency converter has operated more than 60 s (in aperiod of 600 s) below the permitted minimum frequency(1-98 ATEX ETR interpol. points freq. [0]).
ALARM 246, Power card supplyThis alarm is only for F Frame frequency converters. It isequivalent to Alarm 46. The report value in the alarm logindicates which power module generated the alarm:
1 = left most inverter module.
2 = middle inverter module in F2 or F4 frequencyconverter.
2 = right inverter module in F1 or F3 frequencyconverter.
3 = right inverter module in F2 or F4 frequencyconverter.
5 = rectifier module.
WARNING 250, New spare partA component in the frequency converter has beenreplaced. Reset the frequency converter for normaloperation.
WARNING 251, New typecodeThe power card or other components have been replacedand the typecode changed. Reset to remove the warningand resume normal operation.
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
44 MG33AO02 - Rev. 2013-11-07
77

7.5 Troubleshooting
Symptom Possible Cause Test Solution
Displaydark/Nofunction
Missing input power See Table 4.5. Check the input power source.
Missing or open fuses or circuitbreaker tripped
See open fuses and tripped circuit breaker inthis table for possible causes.
Follow the recommendations provided.
No power to the LCP Check the LCP cable for proper connection ordamage.
Replace the faulty LCP or connectioncable.
Shortcut on control voltage(terminal 12 or 50) or atcontrol terminals
Check the 24 V control voltage supply forterminal 12/13 to 20-39 or 10 V supply forterminal 50 to 55.
Wire the terminals properly.
Incompatible LCP (LCP from
VLT® 2800 or 5000/6000/8000/FCD or FCM)
Use only LCP 101 (P/N 130B1124) or LCP102 (P/N. 130B1107).
Wrong contrast setting Press [Status] + []/[] to adjust the
contrast.
Display (LCP) is defective Test using a different LCP.Replace the faulty LCP or connectioncable.
Internal voltage supply fault orSMPS is defective
Contact supplier.
Intermittentdisplay
Overloaded power supply(SMPS) due to improper controlwiring or a fault within thefrequency converter
To rule out a problem in the control wiring,disconnect all control wiring by removing theterminal blocks.
If the display stays lit, then the problem isin the control wiring. Check the wiring forshorts or incorrect connections. If thedisplay continues to cut out, follow theprocedure for display dark.
Motor notrunning
Service switch open or missingmotor connection
Check if the motor is connected and theconnection is not interrupted (by a serviceswitch or other devise).
Connect the motor and check the serviceswitch.
No mains power with 24 V DCoption card
If the display is functioning but no output,check that mains power is applied to thefrequency converter.
Apply mains power to run the unit.
LCP Stop Check if [Off] has been pressed.Press [Auto On] or [Hand On] (dependingon your operation mode) to run themotor.
Missing start signal (Standby)Check 5-10 Terminal 18 Digital Input forcorrect setting for terminal 18 (use defaultsetting).
Apply a valid start signal to start themotor.
Motor coast signal active(Coasting)
Check 5-12 Terminal 27 Digital Input forcorrect setting for terminal 27 (use defaultsetting).
Apply 24 V on terminal 27 or programmthis terminal to No operation.
Wrong reference signal source
Check reference signal: Local, remote or busreference? Preset reference active? Terminalconnection correct? Scaling of terminalscorrect? Reference signal available?
Program correct settings Check3-13 Reference Site Set preset referenceactive in parameter group 3-1* References.Check for correct wiring. Check scaling ofterminals. Check reference signal.
Motorrunning inwrongdirection
Motor rotation limitCheck that 4-10 Motor Speed Direction isprogrammed correctly.
Program correct settings.
Active reversing signalCheck if a reversing command isprogrammed for the terminal in parametergroup 5-1* Digital inputs.
Deactivate reversing signal.
Wrong motor phase connection See 5.5 Checking Motor Rotation in thismanual.
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 45
7 7

Symptom Possible Cause Test Solution
Motor is notreachingmaximumspeed
Frequency limits set wrongCheck output limits in4-13 Motor Speed HighLimit [RPM], 4-14 Motor Speed High Limit [Hz],and 4-19 Max Output Frequency
Program correct limits.
Reference input signal notscaled correctly
Check reference input signal scaling inparameter group 6-0* Analog I/O mode andparameter group 3-1* References.
Program correct settings.
Motor speedunstable
Possible incorrect parametersettings
Check the settings of all motor parameters,including all motor compensation settings.For closed loop operation, check PID settings.
Check settings in parameter group 1-6*Load Depen. Setting. For closed loopoperation check settings in parametergroup 20-0* Feedback.
Motor runsrough
Possible over-magnetisationCheck for incorrect motor settings in allmotor parameters.
Check motor settings in parametergroups 1-2* Motor data 1-3* Adv MotorData, and 1-5* Load Indep. Setting.
Motor willnot brake
Possible incorrect settings inthe brake parameters. Possibletoo short ramp down times.
Check brake parameters. Check ramp timesettings.
Check parameter group 2-0* DC Brake and3-0* Reference Limits.
Open powerfuses orcircuitbreaker trip
Phase to phase shortMotor or panel has a short phase to phase.Check motor and panel phase to for shorts.
Eliminate any shorts detected.
Motor overload Motor is overloaded for the application.
Perform startup test and verify motorcurrent is within specifications. If motorcurrent is exceeding nameplate full loadcurrent, motor may run only with reducedload. Review the specifications for theapplication.
Loose connections Perform pre-startup check for looseconnections.
Tighten loose connections.
Mains currentimbalancegreater than3%
Problem with mains power(See Alarm 4 Mains phase lossdescription)
Rotate input power leads into the drive oneposition: A to B, B to C, C to A.
If imbalanced leg follows the wire, it is apower problem. Check mains powersupply.
Problem with the frequencyconverter unit
Rotate input power leads into the frequencyconverter one position: A to B, B to C, C to A.
If imbalance leg stays on same inputterminal, it is a problem with the unit.Contact supplier.
Motor currentimbalancegreater than3%
Problem with motor or motorwiring
Rotate output motor leads one position: U toV, V to W, W to U.
If imbalanced leg follows the wire, theproblem is in the motor or motor wiring.Check motor and motor wiring.
Problem with frequencyconverter unit
Rotate output motor leads one position: U toV, V to W, W to U.
If imbalance leg stays on same outputterminal, it is a problem with the unit.Contact supplier.
Frequencyconverteraccelerationproblems
Motor data are enteredincorrectly
If warnings or alarms occur, see Check that motor data are entered correctly.
Increase the ramp-up time in 3-41 Ramp 1Ramp Up Time. Increase current limit in4-18 Current Limit. Increase torque limit in4-16 Torque Limit Motor Mode.
Frequencyconverterdecelerationproblems
Motor data are enteredincorrectly
If warnings or alarms occur, see Check that motor data are entered correctly.
Increase the ramp-down time in3-42 Ramp 1 Ramp Down Time. Enableovervoltage control in 2-17 Over-voltageControl.
Table 7.6 Troubleshooting
Maintenance, Diagnostics an... VLT® AutomationDrive FC 301/302 Operating Instructions
46 MG33AO02 - Rev. 2013-11-07
77

8 Specifications
8.1 Electrical Data
8.1.1 Mains Supply 3x200-240 V AC
Type Designation PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
Typical Shaft Output [kW] 0.25 0.37 0.55 0,75 1.1 1.5 2.2 3.0 3.7
Enclosure IP20 (FC 301 only) A1 A1 A1 A1 A1 A1 - - -
Enclosure IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A3 A3
Enclosure IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Output current
Continuous (3x200-240 V) [A] 1.8 2.4 3.5 4.6 6.6 7.5 10.6 12.5 16.7
Intermittent (3x200-240 V) [A] 2.9 3.8 5.6 7.4 10.6 12.0 17.0 20.0 26.7
Continuous kVA (208 V AC) [kVA] 0.65 0.86 1.26 1.66 2.38 2.70 3.82 4.50 6.00
Max. input current
Continuous (3x200-240 V) [A] 1.6 2.2 3.2 4.1 5.9 6.8 9.5 11.3 15.0
Intermittent (3x200-240 V) [A] 2.6 3.5 5.1 6.6 9.4 10.9 15.2 18.1 24.0
Additional Specifications
Max. cable cross section 4) for mains, motor,
brake and load sharing [mm2] ([AWG])
4,4,4 (12,12,12)(min. 0.2 (24))
Max. cable cross section 4) for disconnect
[mm2] ([AWG])6,4,4 (10,12,12)
Estimated power loss at rated max. load [W] 3) 21 29 42 54 63 82 116 155 185
Efficiency 2) 0.94 0.94 0.95 0.95 0.96 0.96 0.96 0.96 0.96
Table 8.1 Mains Supply 3x200-240 V AC, PK25-P3K7
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 47
8 8

Type Designation P5K5 P7K5 P11K
High/Normal Overload1) HO NO HO NO HO NO
Typical Shaft Output [kW] 5.5 7.5 7.5 11 11 15
Enclosure IP20 B3 B3 B4
Enclosure IP21, IP55, IP66 B1 B1 B2
Output current
Continuous (3x200-240 V) [A] 24.2 30.8 30.8 46.2 46.2 59.4
Intermittent (60 s overload) (3x200-240 V) [A] 38.7 33.9 49.3 50.8 73.9 65.3
Continuous kVA (208 V AC) [kVA] 8.7 11.1 11.1 16.6 16.6 21.4
Max. input current
Continuous (3x200-240 V) [A] 22.0 28.0 28.0 42.0 42.0 54.0
Intermittent (60 s overload) (3x200-240 V) [A] 35.2 30.8 44.8 46.2 67.2 59.4
Additional Specifications
IP20 max. cable cross-section 4) for mains, brake, motor and load
sharing [mm2] ([AWG])10,10,- (8,8,-) 10,10,- (8,8,-) 35,-,- (2,-,-)
IP21 max. cable cross-section 4) for mains, brake and load sharing
[mm2] ([AWG])16,10,16 (6,8,6) 16,10,16 (6,8,6) 35,-,- (2,-,-)
IP21 max. cable cross-section 4) for motor [mm2] ([AWG]) 10,10,- (8,8,-) 10,10,- (8,8,-) 35,25,25 (2,4,4)
Max. cable cross-section 4) for Disconnect [mm2] ([AWG]) 16,10,10 (6,8,8)
Estimated power loss at rated max. load [W] 3) 239 310 371 514 463 602
Efficiency 2) 0.96 0.96 0.96
Table 8.2 Mains Supply 3x200-240 V AC, P5K5-P11K
Type Designation P15K P18K P22K P30K P37K
High/Normal Overload1) HO NO HO NO HO NO HO NO HO NO
Typical Shaft Output [kW] 15 18.5 18.5 22 22 30 30 37 37 45
Enclosure IP20 B4 C3 C3 C4 C4
Enclosure IP21, IP55, IP66 C1 C1 C1 C2 C2
Output current
Continuous (3x200-240 V) [A] 59.4 74.8 74.8 88.0 88.0 115 115 143 143 170
Intermittent (60 s overload) (3x200-240 V) [A] 89.1 82.3 112 96.8 132 127 173 157 215 187
Continuous kVA (208 V AC) [kVA] 21.4 26.9 26.9 31.7 31.7 41.4 41.4 51.5 51.5 61.2
Max. input current
Continuous (3x200-240 V) [A] 54.0 68.0 68.0 80.0 80.0 104 104 130 130 154
Intermittent (60 s overload) (3x200-240 V) [A] 81.0 74.8 102 88.0 120 114 156 143 195 169
Additional Specifications
IP20 max. cable cross-section for mains, brake,
motor and load sharing [mm2] ([AWG])35 (2) 50 (1) 50 (1) 150 (300MCM) 150 (300MCM)
IP21, IP55, IP66 max. cable cross-section for
mains and motor [mm2] ([AWG])50 (1) 50 (1) 50 (1) 150 (300MCM) 150 (300MCM)
IP21, IP55, IP66 max. cable cross-section for
brake and load sharing [mm2] ([AWG])50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
Max. cable cross-section 4) for Disconnect [mm2]([AWG])
50, 35, 35 (1, 2, 2)95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120(350MCM,300MCM, 4/0)
Estimated power loss at rated max. load [W] 3) 624 737 740 845 874 1140 1143 1353 1400 1636
Efficiency 2) 0.96 0.97 0.97 0.97 0.97
Table 8.3 Mains Supply 3x200-240 V AC, P15K-P37K
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
48 MG33AO02 - Rev. 2013-11-07
88

8.1.2 Mains Supply 3x380-500 V AC
Type Designation PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Typical Shaft Output [kW] 0.37 0.55 0,75 1.1 1.5 2.2 3.0 4.0 5.5 7.5
Enclosure IP20 (FC 301 only) A1 A1 A1 A1 A1 - - - - -
Enclosure IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
Enclosure IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Output current High overload 160% for 1 min
Shaft output [kW] 0.37 0.55 0.75 1.1 1.5 2.2 3 4 5.5 7.5
Continuous (3x380-440 V) [A] 1.3 1.8 2.4 3.0 4.1 5.6 7.2 10 13 16
Intermittent (3x380-440 V) [A] 2.1 2.9 3.8 4.8 6.6 9.0 11.5 16 20.8 25.6
Continuous (3x441-500 V) [A] 1.2 1.6 2.1 2.7 3.4 4.8 6.3 8.2 11 14.5
Intermittent (3x441-500 V) [A] 1.9 2.6 3.4 4.3 5.4 7.7 10.1 13.1 17.6 23.2
Continuous kVA (400 V AC) [kVA] 0.9 1.3 1.7 2.1 2.8 3.9 5.0 6.9 9.0 11
Continuous kVA (460 V AC) [kVA] 0.9 1.3 1.7 2.4 2.7 3.8 5.0 6.5 8.8 11.6
Max. input current
Continuous (3x380-440 V) [A] 1.2 1.6 2.2 2.7 3.7 5.0 6.5 9.0 11.7 14.4
Intermittent (3x380-440 V) [A] 1.9 2.6 3.5 4.3 5.9 8.0 10.4 14.4 18.7 23
Continuous (3x441-500 V) [A] 1.0 1.4 1.9 2.7 3.1 4.3 5.7 7.4 9.9 13
Intermittent (3x441-500 V) [A] 1.6 2.2 3.0 4.3 5.0 6.9 9.1 11.8 15.8 20.8
Additional Specifications
IP20, IP21 max. cable cross-section 4) for mains,
motor, brake and load sharing [mm2] ([AWG])
4,4,4 (12,12,12)(min. 0.2(24))
IP55, IP66 max. cable cross-section 4) for mains,
motor, brake and load sharing [mm2] ([AWG])4,4,4 (12,12,12)
Max. cable cross-section 4) for disconnect
[mm2] ([AWG])6,4,4 (10,12,12)
Estimated power loss at rated max. load [W] 3) 35 42 46 58 62 88 116 124 187 255
Efficiency 2) 0.93 0.95 0.96 0.96 0.97 0.97 0.97 0.97 0.97 0.97
Table 8.4 Mains Supply 3x380-500 V AC (FC 302), 3x380-480 V AC (FC 301), PK37-P7K5
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 49
8 8

Type Designation P11K P15K P18K P22K
High/Normal Overload1) HO NO HO NO HO NO HO NO
Typical Shaft output [kW] 11 15 15 18.5 18.5 22.0 22.0 30.0
Enclosure IP20 B3 B3 B4 B4
Enclosure IP21 B1 B1 B2 B2
Enclosure IP55, IP66 B1 B1 B2 B2
Output current
Continuous (3x380-440 V) [A] 24 32 32 37.5 37.5 44 44 61
Intermittent (60 s overload) (3x380-440 V) [A] 38.4 35.2 51.2 41.3 60 48.4 70.4 67.1
Continuous (3x441-500 V) [A] 21 27 27 34 34 40 40 52
Intermittent (60 s overload)(3x441-500 V) [A]
33.6 29.7 43.2 37.4 54.4 44 64 57.2
Continuous kVA (400 V AC) [kVA] 16.6 22.2 22.2 26 26 30.5 30.5 42.3
Continuous kVA (460 V AC) [kVA] 21.5 27.1 31.9 41.4
Max. input current
Continuous (3x380-440 V) [A] 22 29 29 34 34 40 40 55
Intermittent (60 s overload)(3x380-440 V) [A]
35.2 31.9 46.4 37.4 54.4 44 64 60.5
Continuous (3x441-500 V) [A] 19 25 25 31 31 36 36 47
Intermittent (60 s overload)(3x441-500 V) [A]
30.4 27.5 40 34.1 49.6 39.6 57.6 51.7
Additional specifications
IP21, IP55, IP66 max. cable cross-section 4) for
mains, brake and load sharing [mm2] ([AWG])16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
IP21, IP55, IP66 max. cable cross-section 4) for
motor [mm2] ([AWG])10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
IP20 max. cable cross-section 4) for mains,
brake, motor and load sharing [mm2] ([AWG])10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
Max. cable cross-section 4) for Disconnect
[mm2] ([AWG])16, 10, 10 (6, 8, 8)
Estimated power loss at rated max. load [W] 3) 291 392 379 465 444 525 547 739
Efficiency 2) 0.98 0.98 0.98 0.98
Table 8.5 Mains Supply 3x380-500 V AC (FC 302), 3x380-480 V AC (FC 301), P11K-P22K
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
50 MG33AO02 - Rev. 2013-11-07
88

Type Designation P30K P37K P45K P55K P75K
High/Normal Overload1) HO NO HO NO HO NO HO NO HO NO
Typical Shaft output [kW] 30 37 37 45 45 55 55 75 75 90
Enclosure IP21 C1 C1 C1 C2 C2
Enclosure IP20 B4 C3 C3 C4 C4
Enclosure IP55, IP66 C1 C1 C1 C2 C2
Output current
Continuous (3x380-440 V) [A] 61 73 73 90 90 106 106 147 147 177
Intermittent (60 s overload)(3x380-440 V) [A]
91.5 80.3 110 99 135 117 159 162 221 195
Continuous (3x441-500 V) [A] 52 65 65 80 80 105 105 130 130 160
Intermittent (60 s overload)(3x441-500 V) [A]
78 71.5 97.5 88 120 116 158 143 195 176
Continuous kVA (400 V AC) [kVA] 42.3 50.6 50.6 62.4 62.4 73.4 73.4 102 102 123
Continuous kVA (460 V AC) [kVA] 51.8 63.7 83.7 104 128
Max. input current
Continuous (3x380-440 V) [A] 55 66 66 82 82 96 96 133 133 161
Intermittent (60 s overload)(3x380-440 V) [A]
82.5 72.6 99 90.2 123 106 144 146 200 177
Continuous (3x441-500 V) [A] 47 59 59 73 73 95 95 118 118 145
Intermittent (60 s overload)(3x441-500 V) [A]
70.5 64.9 88.5 80.3 110 105 143 130 177 160
Additional specifications
IP20 max. cable cross-section for
mains and motor [mm2] ([AWG])35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
IP20 max. cable cross-section for
brake and load sharing [mm2]([AWG])
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
IP21, IP55, IP66 max. cable cross-
section for mains and motor [mm2]([AWG])
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300MCM)
IP21, IP55, IP66 max. cable cross-section for brake and load sharing
[mm2] ([AWG])
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
Max cable cross-section 4) for
mains disconnect [mm2] ([AWG])50, 35, 35
(1, 2, 2)95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120(350 MCM, 300
MCM, 4/0)
Estimated power loss
at rated max. load [W] 3)570 698 697 843 891 1083 1022 1384 1232 1474
Efficiency 2) 0.98 0.98 0.98 0.98 0.99
Table 8.6 Mains Supply 3x380-500 V AC (FC 302), 3x380-480 V AC (FC 301), P30K-P75K
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 51
8 8

8.1.3 Mains Supply 3x525-600 V AC (FC 302 only)
Type Designation PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Typical Shaft Output [kW] 0.75 1.1 1.5 2.2 3 4 5.5 7.5
Enclosure IP20, IP21 A3 A3 A3 A3 A3 A3 A3 A3
Enclosure IP55 A5 A5 A5 A5 A5 A5 A5 A5
Output current
Continuous (3x525-550 V) [A] 1.8 2.6 2.9 4.1 5.2 6.4 9.5 11.5
Intermittent (3x525-550 V) [A] 2.9 4.2 4.6 6.6 8.3 10.2 15.2 18.4
Continuous (3x551-600 V) [A] 1.7 2.4 2.7 3.9 4.9 6.1 9.0 11.0
Intermittent (3x551-600 V) [A] 2.7 3.8 4.3 6.2 7.8 9.8 14.4 17.6
Continuous kVA (525 V AC) [kVA] 1.7 2.5 2.8 3.9 5.0 6.1 9.0 11.0
Continuous kVA (575 V AC) [kVA] 1.7 2.4 2.7 3.9 4.9 6.1 9.0 11.0
Max. input current
Continuous (3x525-600 V) [A] 1.7 2.4 2.7 4.1 5.2 5.8 8.6 10.4
Intermittent (3x525-600 V) [A] 2.7 3.8 4.3 6.6 8.3 9.3 13.8 16.6
Additional specifications
Max. cable cross-section 4) for mains, motor,
brake and load sharing [mm2] ([AWG])
4,4,4 (12,12,12)(min. 0.2 (24))
Max. cable cross-section 4) for disconnect [mm2]([AWG])
6,4,4 (10,12,12)
Estimated power loss at rated max. load [W] 3) 35 50 65 92 122 145 195 261
Efficiency 2) 0.97 0.97 0.97 0.97 0.97 0.97 0.97 0.97
Table 8.7 Mains Supply 3x525-600 V AC (FC 302 only), PK75-P7K5
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
52 MG33AO02 - Rev. 2013-11-07
88

Type Designation P11K P15K P18K P22K P30K
High/Normal Overload1) HO NO HO NO HO NO HO NO HO NO
Typical Shaft Output [kW] 11 15 15 18.5 18.5 22 22 30 30 37
Enclosure IP20 B3 B3 B4 B4 B4
Enclosure IP21, IP55, IP66 B1 B1 B2 B2 C1
Output current
Continuous (3x525-550 V) [A] 19 23 23 28 28 36 36 43 43 54
Intermittent (3x525-550 V) [A] 30 25 37 31 45 40 58 47 65 59
Continuous (3x551-600 V) [A] 18 22 22 27 27 34 34 41 41 52
Intermittent (3x551-600 V) [A] 29 24 35 30 43 37 54 45 62 57
Continuous kVA (550 V AC) [kVA] 18.1 21.9 21.9 26.7 26.7 34.3 34.3 41.0 41.0 51.4
Continuous kVA (575 V AC) [kVA] 17.9 21.9 21.9 26.9 26.9 33.9 33.9 40.8 40.8 51.8
Max. input current
Continuous at 550 V [A] 17.2 20.9 20.9 25.4 25.4 32.7 32.7 39 39 49
Intermittent at 550 V [A] 28 23 33 28 41 36 52 43 59 54
Continuous at 575 V [A] 16 20 20 24 24 31 31 37 37 47
Intermittent at 575 V [A] 26 22 32 27 39 34 50 41 56 52
Additional specifications
IP20 max. cable cross-section 4) formains, brake, motor and load
sharing [mm2] ([AWG])
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
IP21, IP55, IP66 max. cable cross-
section 4) for mains, brake and load
sharing [mm2] ([AWG])
16, 10, 10 (6, 8, 8) 16, 10, 10 (6, 8, 8) 35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
IP21, IP55, IP66 max. cable cross-
section 4) for motor [mm2] ([AWG])10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4) 50,-,- (1,-,-)
Max. cable cross-section 4) for
Disconnect [mm2] ([AWG])
16, 10, 10(6, 8, 8)
50, 35, 35(1, 2, 2)
Estimated power loss
at rated max. load [W] 3)220 300 300 370 370 440 440 600 600 740
Efficiency 2) 0.98 0.98 0.98 0.98 0.98
Table 8.8 Mains Supply 3x525-600 V AC (FC 302 only), P11K-P30K
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 53
8 8
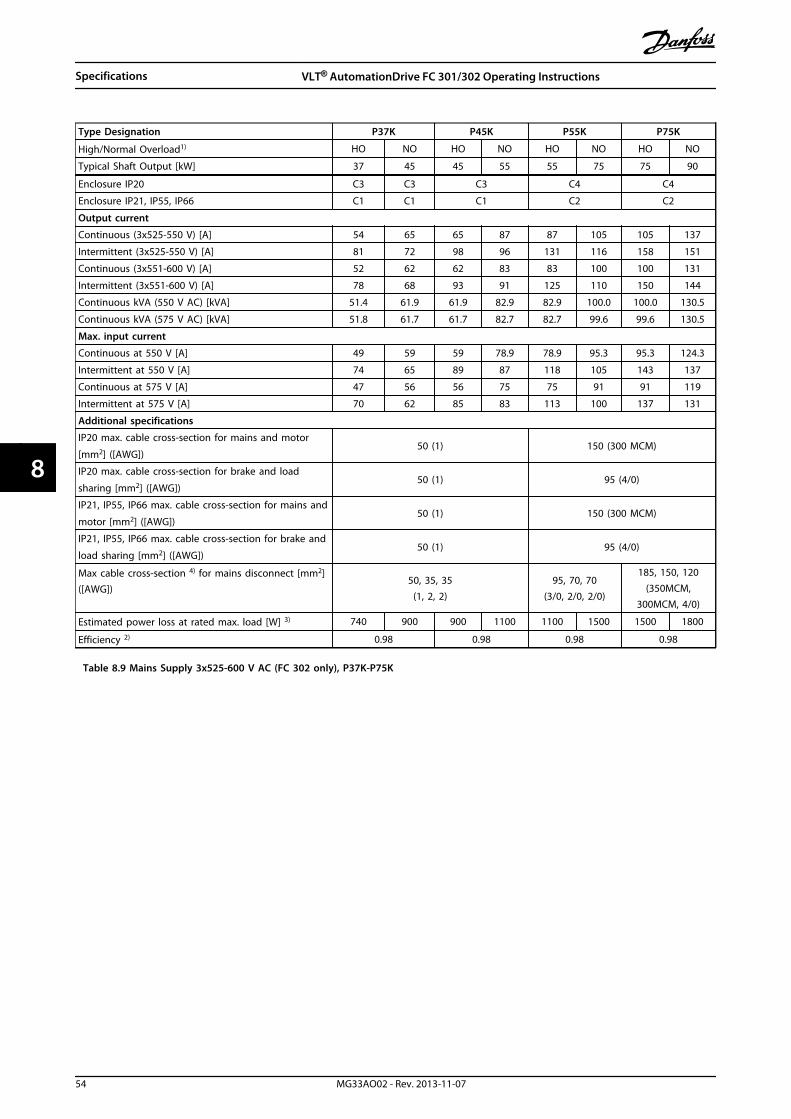
Type Designation P37K P45K P55K P75K
High/Normal Overload1) HO NO HO NO HO NO HO NO
Typical Shaft Output [kW] 37 45 45 55 55 75 75 90
Enclosure IP20 C3 C3 C3 C4 C4
Enclosure IP21, IP55, IP66 C1 C1 C1 C2 C2
Output current
Continuous (3x525-550 V) [A] 54 65 65 87 87 105 105 137
Intermittent (3x525-550 V) [A] 81 72 98 96 131 116 158 151
Continuous (3x551-600 V) [A] 52 62 62 83 83 100 100 131
Intermittent (3x551-600 V) [A] 78 68 93 91 125 110 150 144
Continuous kVA (550 V AC) [kVA] 51.4 61.9 61.9 82.9 82.9 100.0 100.0 130.5
Continuous kVA (575 V AC) [kVA] 51.8 61.7 61.7 82.7 82.7 99.6 99.6 130.5
Max. input current
Continuous at 550 V [A] 49 59 59 78.9 78.9 95.3 95.3 124.3
Intermittent at 550 V [A] 74 65 89 87 118 105 143 137
Continuous at 575 V [A] 47 56 56 75 75 91 91 119
Intermittent at 575 V [A] 70 62 85 83 113 100 137 131
Additional specifications
IP20 max. cable cross-section for mains and motor
[mm2] ([AWG])50 (1) 150 (300 MCM)
IP20 max. cable cross-section for brake and load
sharing [mm2] ([AWG])50 (1) 95 (4/0)
IP21, IP55, IP66 max. cable cross-section for mains and
motor [mm2] ([AWG])50 (1) 150 (300 MCM)
IP21, IP55, IP66 max. cable cross-section for brake and
load sharing [mm2] ([AWG])50 (1) 95 (4/0)
Max cable cross-section 4) for mains disconnect [mm2]([AWG])
50, 35, 35(1, 2, 2)
95, 70, 70(3/0, 2/0, 2/0)
185, 150, 120(350MCM,
300MCM, 4/0)
Estimated power loss at rated max. load [W] 3) 740 900 900 1100 1100 1500 1500 1800
Efficiency 2) 0.98 0.98 0.98 0.98
Table 8.9 Mains Supply 3x525-600 V AC (FC 302 only), P37K-P75K
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
54 MG33AO02 - Rev. 2013-11-07
88

8.1.4 Mains Supply 3x525-690 V AC (FC 302 only)
Type Designation P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
High/Normal Overload1) HO/NO HO/NO HO/NO HO/NO HO/NO HO/NO HO/NO
Typical Shaft output (kW) 1.1 1.5 2.2 3.0 4.0 5.5 7.5
Enclosure IP20 A3 A3 A3 A3 A3 A3 A3
Output current
Continuous (3x525-550V) [A] 2.1 2.7 3.9 4.9 6.1 9.0 11.0
Intermittent (3x525-550V) [A] 3.4 4.3 6.2 7.8 9.8 14.4 17.6
Continuous (3x551-690V) [A] 1.6 2.2 3.2 4.5 5.5 7.5 10.0
Intermittent (3x551-690V) [A] 2.6 3.5 5.1 7.2 8.8 12.0 16.0
Continuous KVA 525 V AC 1.9 2.5 3.5 4.5 5.5 8.2 10.0
Continuous KVA 690 V AC 1.9 2.6 3.8 5.4 6.6 9.0 12.0
Max. input current
Continuous (3x525-550V) [A] 1.9 2.4 3.5 4.4 5.5 8.1 9.9
Intermittent (3x525-550V) [A] 3.0 3.9 5.6 7.0 8.8 12.9 15.8
Continuous (3x551-690V) [A] 1.4 2.0 2.9 4.0 4.9 6.7 9.0
Intermittent (3x551-690V) [A] 2.3 3.2 4.6 6.5 7.9 10.8 14.4
Additional specifications
Max. cable cross-section 4) for mains, motor, brake and
load sharing [mm2] ([AWG])4, 4, 4 (12, 12, 12) (min. 0.2 (24)
Max. Cable cross-section 4) for disconnect [mm2]([AWG])
6, 4, 4 (10, 12, 12)
Estimated power loss at rated max. load (W) 3) 44 60 88 120 160 220 300
Efficiency 2) 0.96 0.96 0.96 0.96 0.96 0.96 0.96
Table 8.10 A3 Enclosure, Mains Supply 3x525-690 V AC IP20/Protected Chassis, P1K1-P7K5
Type Designation P11K P15K P18K P22K
High/Normal Overload1) HO NO HO NO HO NO HO NO
Typical Shaft output at 550 V [kW] 7.5 11 11 15 15 18.5 18.5 22
Typical Shaft output at 690 V [kW] 11 15 15 18.5 18.5 22 22 30
Enclosure IP20 B4 B4 B4 B4
Enclosure IP21, IP55 B2 B2 B2 B2
Output current
Continuous (3x525-550V) [A] 14.0 19.0 19.0 23.0 23.0 28.0 28.0 36.0
Intermittent (60 s overload) (3x525-550V) [A] 22.4 20.9 30.4 25.3 36.8 30.8 44.8 39.6
Continuous (3x551-690V) [A] 13.0 18.0 18.0 22.0 22.0 27.0 27.0 34.0
Intermittent (60 s overload) (3x551-690V) [A] 20.8 19.8 28.8 24.2 35.2 29.7 43.2 37.4
continuous KVA (at 550 V) [KVA] 13.3 18.1 18.1 21.9 21.9 26.7 26.7 34.3
continuous KVA (at 690 V AC) [KVA] 15.5 21.5 21.5 26.3 26.3 32.3 32.3 40.6
Max. input current
Continuous (at 550 V) (A) 15.0 19.5 19.5 24.0 24.0 29.0 29.0 36.0
Intermittent (60 s overload) (at 550 V) (A) 23.2 21.5 31.2 26.4 38.4 31.9 46.4 39.6
Continuous (at 690 V) (A) 14.5 19.5 19.5 24.0 24.0 29.0 29.0 36.0
Intermittent (60 s overload) (at 690 V) (A) 23.2 21.5 31.2 26.4 38.4 31.9 46.4 39.6
Additional specifications
Max. cable cross-section 4) for mains/motor, load
share and brake [mm2] ([AWG])35, 25, 25 (2, 4, 4)
Max cable cross-section 4) for mains disconnect
[mm2] ([AWG])16,10,10 (6, 8, 8)
Estimated power loss at rated max. load (W) 3) 150 220 220 300 300 370 370 440
Efficiency 2) 0.98 0.98 0.98 0.98
Table 8.11 B2/B4 Enclosure, Mains Supply 3x525-690 V AC IP20/IP21/IP55 - Chassis/NEMA 1/NEMA 12 (FC 302 only), P11K-P22K
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 55
8 8

Type Designation P30K P37K P45K P55K P75K
High/Normal Overload1) HO NO HO NO HO NO HO NO HO NO
Typical Shaft output at 550 V (kW) 22 30 30 37 37 45 45 55 50 75
Typical Shaft output at 690 V [kW] 30 37 37 45 45 55 55 75 75 90
Enclosure IP20 B4 C3 C3 D3h D3h
Enclosure IP21, IP55 C2 C2 C2 C2 C2
Output current
Continuous (3x525-550V) [A] 36.0 43.0 43.0 54.0 54.0 65.0 65.0 87.0 87.0 105
Intermittent (60 s overload) (3x525-550V)[A] 54.0 47.3 64.5 59.4 81.0 71.5 97.5 95.7 130.5 115.5
Continuous (3x551-690V) [A] 34.0 41.0 41.0 52.0 52.0 62.0 62.0 83.0 83.0 100
Intermittent (60 s overload) (3x551-690V)[A] 51.0 45.1 61.5 57.2 78.0 68.2 93.0 91.3 124.5 110
continuous KVA (at 550 V AC) [KVA] 34.3 41.0 41.0 51.4 51.4 61.9 61.9 82.9 82.9 100
continuous KVA (at 690 V AC) [KVA] 40.6 49.0 49.0 62.1 62.1 74.1 74.1 99.2 99.2 119.5
Max. input current
Continuous (at 550 V) [A] 36.0 49.0 49.0 59.0 59.0 71.0 71.0 87.0 87.0 99.0
Intermittent (60 s overload) (at 550 V) [A] 54.0 53.9 72.0 64.9 87.0 78.1 105.0 95.7 129 108.9
Continuous (at 690 V) [A] 36.0 48.0 48.0 58.0 58.0 70.0 70.0 86.0 - -
Intermittent (60 s overload) (at 690 V) [A] 54.0 52.8 72.0 63.8 87.0 77.0 105 94.6 - -
Additional specifications
Max. cable-cross section for mains and
motor [mm2] ([AWG])150 (300 MCM)
Max. cable cross-section for load share and
brake [mm2] ([AWG])95 (3/0)
Max cable cross-section 4) for mains
disconnect [mm2] ([AWG])
95, 70, 70(3/0, 2/0, 2/0)
185, 150, 120(350 MCM, 300
MCM, 4/0)-
Estimated power loss
at rated max. load [W] 3)600 740 740 900 900 1100 1100 1500 1500 1800
Efficiency 2) 0,98 0,98 0,98 0,98 0,98
Table 8.12 B4, C2, C3 Enclosure, Mains Supply 3x525-690 V AC IP20/IP21/IP55 - Chassis/NEMA1/NEMA 12 (FC 302 only), P30K-P75K
For fuse ratings, see 8.7 Fuses and Circuit Breakers.
1) High overload=150% or 160% torque during 60 s. Normal overload=110% torque during 60 s.
2) Measured using 5 m screened motor cables at rated load and rated frequency.
3) The typical power loss is at nominal load conditions and expected to be within ±15% (tolerance relates to variety in voltage andcable conditions).Values are based on a typical motor efficiency (eff2/eff3 border line). Motors with lower efficiency will also add to the power loss in thefrequency converter and opposite.If the switching frequency is increased compared to the default setting, the power losses may rise significantly.LCP and typical control card power consumptions are included. Further options and customer load may add up to 30 W to the losses.(Though typical only 4 W extra for a fully loaded control card, or options for slot A or slot B, each).
Although measurements are made with state of the art equipment, some measurement inaccuracy must be allowed for (± 5%).
4) The three values for the max. cable cross section are for single core, flexible wire and flexible wire with sleeve, respectively.
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
56 MG33AO02 - Rev. 2013-11-07
88
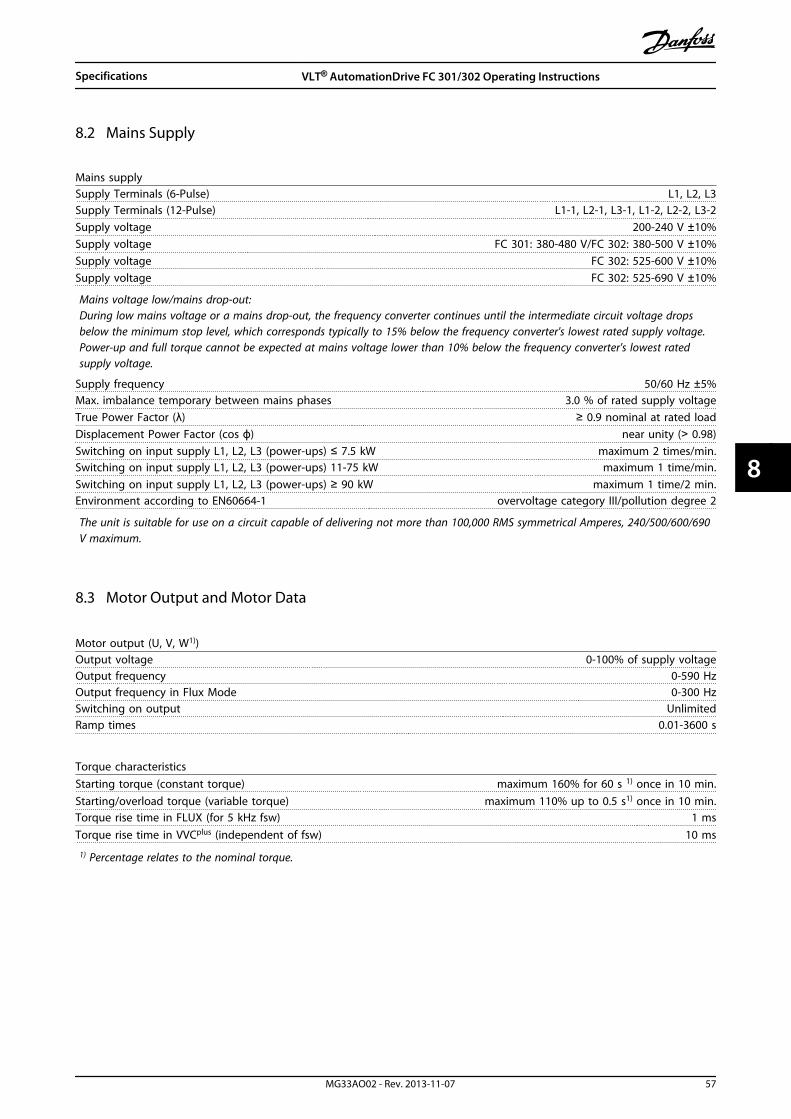
8.2 Mains Supply
Mains supplySupply Terminals (6-Pulse) L1, L2, L3Supply Terminals (12-Pulse) L1-1, L2-1, L3-1, L1-2, L2-2, L3-2Supply voltage 200-240 V ±10%Supply voltage FC 301: 380-480 V/FC 302: 380-500 V ±10%Supply voltage FC 302: 525-600 V ±10%Supply voltage FC 302: 525-690 V ±10%
Mains voltage low/mains drop-out:During low mains voltage or a mains drop-out, the frequency converter continues until the intermediate circuit voltage dropsbelow the minimum stop level, which corresponds typically to 15% below the frequency converter's lowest rated supply voltage.Power-up and full torque cannot be expected at mains voltage lower than 10% below the frequency converter's lowest ratedsupply voltage.
Supply frequency 50/60 Hz ±5%Max. imbalance temporary between mains phases 3.0 % of rated supply voltageTrue Power Factor (λ) ≥ 0.9 nominal at rated loadDisplacement Power Factor (cos ϕ) near unity (> 0.98)Switching on input supply L1, L2, L3 (power-ups) ≤ 7.5 kW maximum 2 times/min.Switching on input supply L1, L2, L3 (power-ups) 11-75 kW maximum 1 time/min.Switching on input supply L1, L2, L3 (power-ups) ≥ 90 kW maximum 1 time/2 min.Environment according to EN60664-1 overvoltage category III/pollution degree 2
The unit is suitable for use on a circuit capable of delivering not more than 100,000 RMS symmetrical Amperes, 240/500/600/690V maximum.
8.3 Motor Output and Motor Data
Motor output (U, V, W1))Output voltage 0-100% of supply voltageOutput frequency 0-590 HzOutput frequency in Flux Mode 0-300 HzSwitching on output UnlimitedRamp times 0.01-3600 s
Torque characteristicsStarting torque (constant torque) maximum 160% for 60 s 1) once in 10 min.Starting/overload torque (variable torque) maximum 110% up to 0.5 s1) once in 10 min.Torque rise time in FLUX (for 5 kHz fsw) 1 msTorque rise time in VVCplus (independent of fsw) 10 ms
1) Percentage relates to the nominal torque.
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 57
8 8
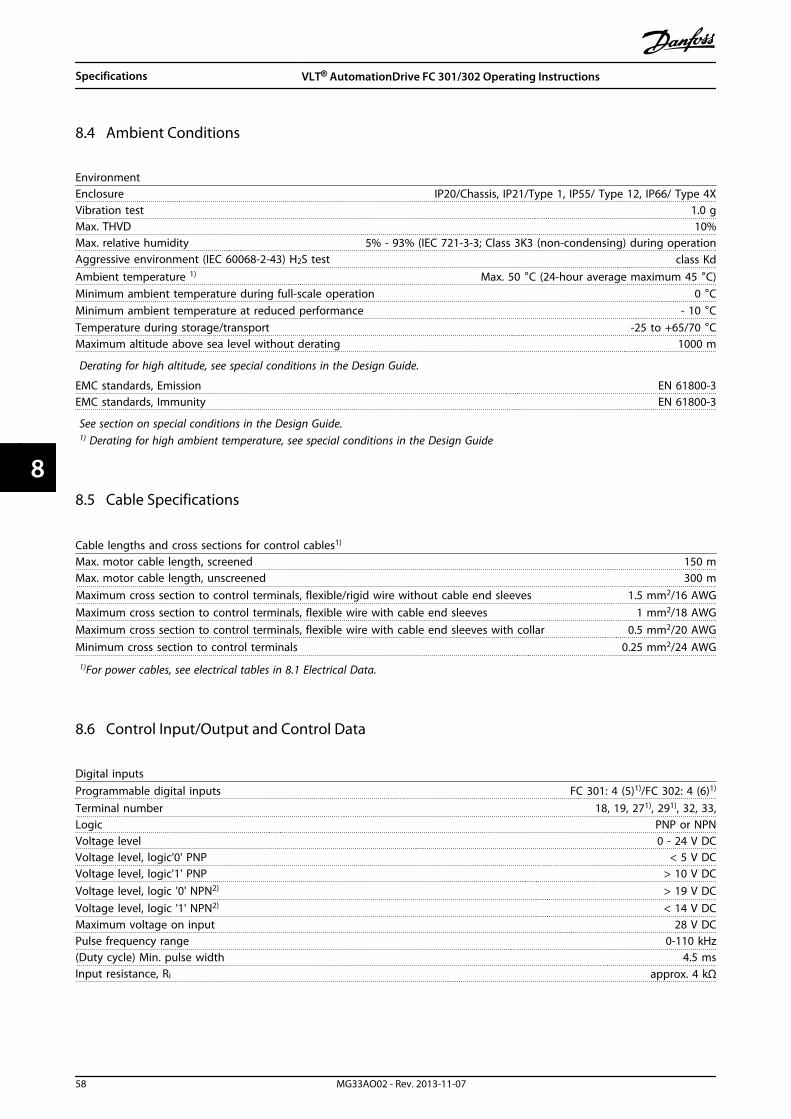
8.4 Ambient Conditions
EnvironmentEnclosure IP20/Chassis, IP21/Type 1, IP55/ Type 12, IP66/ Type 4XVibration test 1.0 gMax. THVD 10%Max. relative humidity 5% - 93% (IEC 721-3-3; Class 3K3 (non-condensing) during operationAggressive environment (IEC 60068-2-43) H2S test class KdAmbient temperature 1) Max. 50 °C (24-hour average maximum 45 °C)Minimum ambient temperature during full-scale operation 0 °CMinimum ambient temperature at reduced performance - 10 °CTemperature during storage/transport -25 to +65/70 °CMaximum altitude above sea level without derating 1000 m
Derating for high altitude, see special conditions in the Design Guide.
EMC standards, Emission EN 61800-3EMC standards, Immunity EN 61800-3
See section on special conditions in the Design Guide.1) Derating for high ambient temperature, see special conditions in the Design Guide
8.5 Cable Specifications
Cable lengths and cross sections for control cables1)
Max. motor cable length, screened 150 mMax. motor cable length, unscreened 300 mMaximum cross section to control terminals, flexible/rigid wire without cable end sleeves 1.5 mm2/16 AWGMaximum cross section to control terminals, flexible wire with cable end sleeves 1 mm2/18 AWGMaximum cross section to control terminals, flexible wire with cable end sleeves with collar 0.5 mm2/20 AWGMinimum cross section to control terminals 0.25 mm2/24 AWG
1)For power cables, see electrical tables in 8.1 Electrical Data.
8.6 Control Input/Output and Control Data
Digital inputsProgrammable digital inputs FC 301: 4 (5)1)/FC 302: 4 (6)1)
Terminal number 18, 19, 271), 291), 32, 33,Logic PNP or NPNVoltage level 0 - 24 V DCVoltage level, logic'0' PNP < 5 V DCVoltage level, logic'1' PNP > 10 V DCVoltage level, logic '0' NPN2) > 19 V DCVoltage level, logic '1' NPN2) < 14 V DCMaximum voltage on input 28 V DCPulse frequency range 0-110 kHz(Duty cycle) Min. pulse width 4.5 msInput resistance, Ri approx. 4 kΩ
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
58 MG33AO02 - Rev. 2013-11-07
88

Safe stop Terminal 373, 4) (Terminal 37 is fixed PNP logic)Voltage level 0-24 V DCVoltage level, logic'0' PNP <4 V DCVoltage level, logic'1' PNP >20 V DCMaximum voltage on input 28 V DCTypical input current at 24 V 50 mA rmsTypical input current at 20 V 60 mA rmsInput capacitance 400 nF
All digital inputs are galvanically isolated from the supply voltage (PELV) and other high-voltage terminals.1) Terminals 27 and 29 can also be programmed as output.2) Except Safe Torque Off input Terminal 37.3) See 4.8.5 Safe Torque Off (STO) for further information about terminal 37 and Safe Torque Off.4) When using a contactor with a DC coil inside in combination with Safe Torque Off, it is important to make a return way forthe current from the coil when turning it off. This can be done by using a freewheel diode (or, alternatively, a 30 or 50 V MOV forquicker response time) across the coil. Typical contactors can be bought with this diode.
Analog inputsNumber of analog inputs 2Terminal number 53, 54Modes Voltage or currentMode select Switch S201 and switch S202Voltage mode Switch S201/switch S202 = OFF (U)Voltage level -10 to +10 V (scaleable)Input resistance, Ri approx. 10 kΩMax. voltage ±20 VCurrent mode Switch S201/switch S202 = ON (I)Current level 0/4 to 20 mA (scaleable)Input resistance, Ri approx. 200 ΩMax. current 30 mAResolution for analog inputs 10 bit (+ sign)Accuracy of analog inputs Max. error 0.5% of full scaleBandwidth 100 Hz
The analog inputs are galvanically isolated from the supply voltage (PELV) and other high-voltage terminals.
Mains
Functionalisolation
PELV isolation
Motor
DC-Bus
Highvoltage
Control+24V
RS485
18
37
130B
A11
7.10
Illustration 8.1 PELV Isolation
Pulse/encoder inputsProgrammable pulse/encoder inputs 2/1Terminal number pulse/encoder 291), 332) / 323), 333)
Max. frequency at terminal 29, 32, 33 110 kHz (Push-pull driven)Max. frequency at terminal 29, 32, 33 5 kHz (open collector)Min. frequency at terminal 29, 32, 33 4 HzVoltage level see section on Digital inputMaximum voltage on input 28 V DC
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 59
8 8

Input resistance, Ri approx. 4 kΩPulse input accuracy (0.1-1 kHz) Max. error: 0.1% of full scaleEncoder input accuracy (1-11 kHz) Max. error: 0.05 % of full scale
The pulse and encoder inputs (terminals 29, 32, 33) are galvanically isolated from the supply voltage (PELV) and other high-voltage terminals.1) FC 302 only2) Pulse inputs are 29 and 333) Encoder inputs: 32 = A, and 33 = B
Digital outputProgrammable digital/pulse outputs 2Terminal number 27, 29 1)
Voltage level at digital/frequency output 0-24 VMax. output current (sink or source) 40 mAMax. load at frequency output 1 kΩMax. capacitive load at frequency output 10 nFMinimum output frequency at frequency output 0 HzMaximum output frequency at frequency output 32 kHzAccuracy of frequency output Max. error: 0.1 % of full scaleResolution of frequency outputs 12 bit
1) Terminal 27 and 29 can also be programmed as input.
The digital output is galvanically isolated from the supply voltage (PELV) and other high-voltage terminals.
Analog outputNumber of programmable analog outputs 1Terminal number 42Current range at analog output 0/4 to 20 mAMax. load GND - analog output less than 500 ΩAccuracy on analog output Max. error: 0.5% of full scaleResolution on analog output 12 bit
The analog output is galvanically isolated from the supply voltage (PELV) and other high-voltage terminals.
Control card, 24 V DC outputTerminal number 12, 13Output voltage 24 V +1, -3 VMax. load 200 mA
The 24 V DC supply is galvanically isolated from the supply voltage (PELV), but has the same potential as the analog and digitalinputs and outputs.
Control card, 10 V DC outputTerminal number ±50Output voltage 10.5 V ±0.5 VMax. load 15 mA
The 10 V DC supply is galvanically isolated from the supply voltage (PELV) and other high-voltage terminals.
Control card, RS-485 serial communicationTerminal number 68 (P,TX+, RX+), 69 (N,TX-, RX-)Terminal number 61 Common for terminals 68 and 69
The RS-485 serial communication circuit is functionally separated from other central circuits and galvanically isolated from thesupply voltage (PELV).
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
60 MG33AO02 - Rev. 2013-11-07
88

Control card, USB serial communication USB standard 1.1 (Full speed)USB plug USB type B “device” plug
Connection to PC is carried out via a standard host/device USB cable.The USB connection is galvanically isolated from the supply voltage (PELV) and other high-voltage terminals.The USB ground connection is not galvanically isolated from protection earth. Use only an isolated laptop as PC connection tothe USB connector on the frequency converter.
Relay outputsProgrammable relay outputs FC 301 all kW: 1/FC 302 all kW: 2Relay 01 Terminal number 1-3 (break), 1-2 (make)Max. terminal load (AC-1)1) on 1-3 (NC), 1-2 (NO) (Resistive load) 240 V AC, 2 AMax. terminal load (AC-15)1) (Inductive load @ cosφ 0.4) 240 V AC, 0.2 AMax. terminal load (DC-1)1) on 1-2 (NO), 1-3 (NC) (Resistive load) 60 V DC, 1 AMax. terminal load (DC-13)1) (Inductive load) 24 V DC, 0.1 ARelay 02 (FC 302 only) Terminal number 4-6 (break), 4-5 (make)Max. terminal load (AC-1)1) on 4-5 (NO) (Resistive load)2)3) Overvoltage cat. II 400 V AC, 2 AMax. terminal load (AC-15)1) on 4-5 (NO) (Inductive load @ cosφ 0.4) 240 V AC, 0.2 AMax. terminal load (DC-1)1) on 4-5 (NO) (Resistive load) 80 V DC, 2 AMax. terminal load (DC-13)1) on 4-5 (NO) (Inductive load) 24 V DC, 0.1 AMax. terminal load (AC-1)1) on 4-6 (NC) (Resistive load) 240 V AC, 2 AMax. terminal load (AC-15)1) on 4-6 (NC) (Inductive load @ cosφ 0.4) 240 V AC, 0.2 AMax. terminal load (DC-1)1) on 4-6 (NC) (Resistive load) 50 V DC, 2 AMax. terminal load (DC-13)1) on 4-6 (NC) (Inductive load) 24 V DC, 0.1 AMin. terminal load on 1-3 (NC), 1-2 (NO), 4-6 (NC), 4-5 (NO) 24 V DC 10 mA, 24 V AC 20 mAEnvironment according to EN 60664-1 overvoltage category III/pollution degree 2
1) IEC 60947 part 4 and 5The relay contacts are galvanically isolated from the rest of the circuit by reinforced isolation (PELV).2) Overvoltage Category II3) UL applications 300 V AC2A
Control card performanceScan interval 1 ms
Control characteristicsResolution of output frequency at 0-590 Hz ±0.003 HzRepeat accuracy of Precise start/stop (terminals 18, 19) ≤±0.1 msSystem response time (terminals 18, 19, 27, 29, 32, 33) ≤ 2 msSpeed control range (open loop) 1:100 of synchronous speedSpeed control range (closed loop) 1:1000 of synchronous speedSpeed accuracy (open loop) 30-4000 RPM: error ±8 RPMSpeed accuracy (closed loop), depending on resolution of feedback device 0-6000 RPM: error ±0.15 RPMTorque control accuracy (speed feedback) max. error ±5% of rated torque
All control characteristics are based on a 4-pole asynchronous motor
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 61
8 8
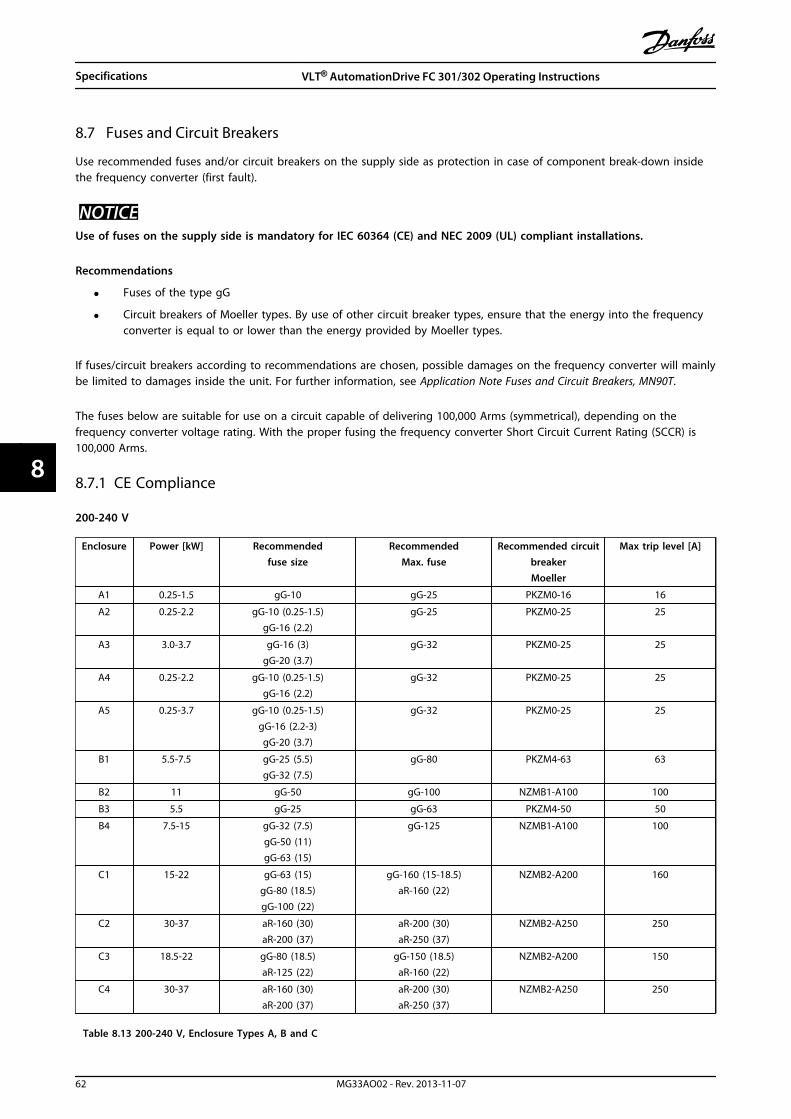
8.7 Fuses and Circuit Breakers
Use recommended fuses and/or circuit breakers on the supply side as protection in case of component break-down insidethe frequency converter (first fault).
NOTICEUse of fuses on the supply side is mandatory for IEC 60364 (CE) and NEC 2009 (UL) compliant installations.
Recommendations
• Fuses of the type gG
• Circuit breakers of Moeller types. By use of other circuit breaker types, ensure that the energy into the frequencyconverter is equal to or lower than the energy provided by Moeller types.
If fuses/circuit breakers according to recommendations are chosen, possible damages on the frequency converter will mainlybe limited to damages inside the unit. For further information, see Application Note Fuses and Circuit Breakers, MN90T.
The fuses below are suitable for use on a circuit capable of delivering 100,000 Arms (symmetrical), depending on thefrequency converter voltage rating. With the proper fusing the frequency converter Short Circuit Current Rating (SCCR) is100,000 Arms.
8.7.1 CE Compliance
200-240 V
Enclosure Power [kW] Recommendedfuse size
RecommendedMax. fuse
Recommended circuitbreakerMoeller
Max trip level [A]
A1 0.25-1.5 gG-10 gG-25 PKZM0-16 16
A2 0.25-2.2 gG-10 (0.25-1.5)gG-16 (2.2)
gG-25 PKZM0-25 25
A3 3.0-3.7 gG-16 (3)gG-20 (3.7)
gG-32 PKZM0-25 25
A4 0.25-2.2 gG-10 (0.25-1.5)gG-16 (2.2)
gG-32 PKZM0-25 25
A5 0.25-3.7 gG-10 (0.25-1.5)gG-16 (2.2-3)gG-20 (3.7)
gG-32 PKZM0-25 25
B1 5.5-7.5 gG-25 (5.5)gG-32 (7.5)
gG-80 PKZM4-63 63
B2 11 gG-50 gG-100 NZMB1-A100 100
B3 5.5 gG-25 gG-63 PKZM4-50 50
B4 7.5-15 gG-32 (7.5)gG-50 (11)gG-63 (15)
gG-125 NZMB1-A100 100
C1 15-22 gG-63 (15)gG-80 (18.5)gG-100 (22)
gG-160 (15-18.5)aR-160 (22)
NZMB2-A200 160
C2 30-37 aR-160 (30)aR-200 (37)
aR-200 (30)aR-250 (37)
NZMB2-A250 250
C3 18.5-22 gG-80 (18.5)aR-125 (22)
gG-150 (18.5)aR-160 (22)
NZMB2-A200 150
C4 30-37 aR-160 (30)aR-200 (37)
aR-200 (30)aR-250 (37)
NZMB2-A250 250
Table 8.13 200-240 V, Enclosure Types A, B and C
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
62 MG33AO02 - Rev. 2013-11-07
88
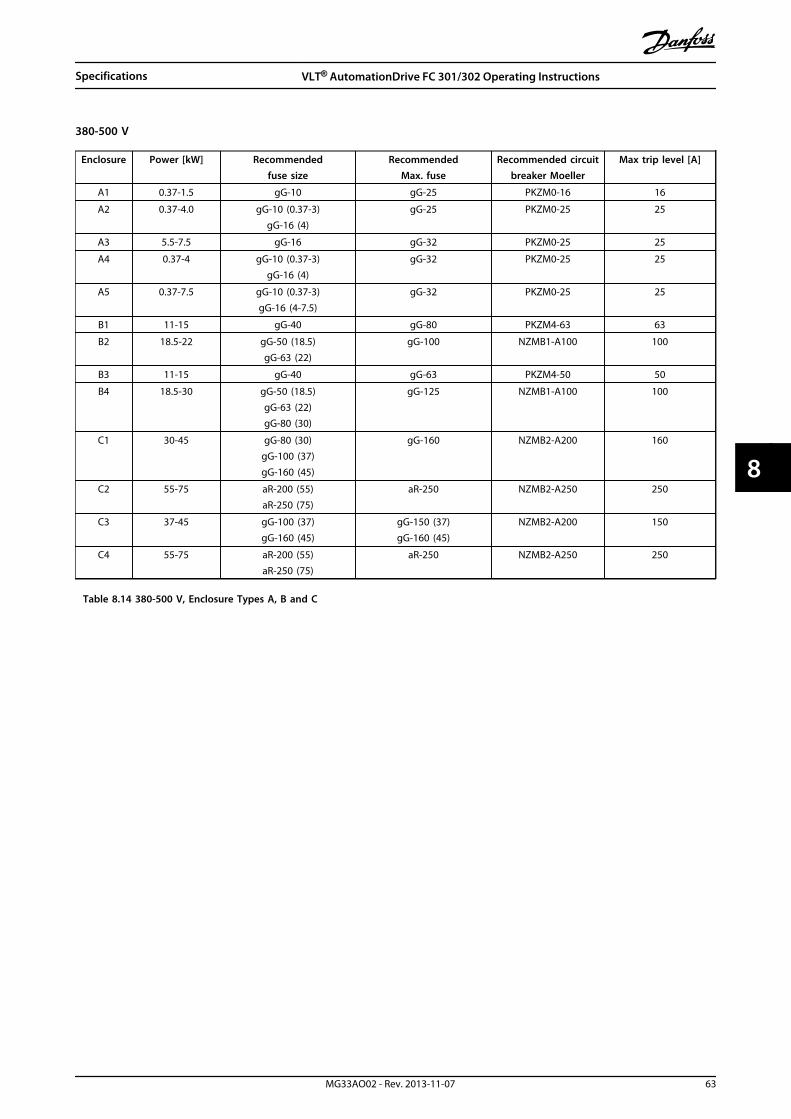
380-500 V
Enclosure Power [kW] Recommendedfuse size
RecommendedMax. fuse
Recommended circuitbreaker Moeller
Max trip level [A]
A1 0.37-1.5 gG-10 gG-25 PKZM0-16 16
A2 0.37-4.0 gG-10 (0.37-3)gG-16 (4)
gG-25 PKZM0-25 25
A3 5.5-7.5 gG-16 gG-32 PKZM0-25 25
A4 0.37-4 gG-10 (0.37-3)gG-16 (4)
gG-32 PKZM0-25 25
A5 0.37-7.5 gG-10 (0.37-3)gG-16 (4-7.5)
gG-32 PKZM0-25 25
B1 11-15 gG-40 gG-80 PKZM4-63 63
B2 18.5-22 gG-50 (18.5)gG-63 (22)
gG-100 NZMB1-A100 100
B3 11-15 gG-40 gG-63 PKZM4-50 50
B4 18.5-30 gG-50 (18.5)gG-63 (22)gG-80 (30)
gG-125 NZMB1-A100 100
C1 30-45 gG-80 (30)gG-100 (37)gG-160 (45)
gG-160 NZMB2-A200 160
C2 55-75 aR-200 (55)aR-250 (75)
aR-250 NZMB2-A250 250
C3 37-45 gG-100 (37)gG-160 (45)
gG-150 (37)gG-160 (45)
NZMB2-A200 150
C4 55-75 aR-200 (55)aR-250 (75)
aR-250 NZMB2-A250 250
Table 8.14 380-500 V, Enclosure Types A, B and C
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 63
8 8

525-600 V
Enclosure Power [kW] Recommendedfuse size
RecommendedMax. fuse
Recommended circuitbreakerMoeller
Max trip level [A]
A2 0-75-4.0 gG-10 gG-25 PKZM0-25 25
A3 5.5-7.5 gG-10 (5.5)gG-16 (7.5)
gG-32 PKZM0-25 25
A5 0.75-7.5 gG-10 (0.75-5.5)gG-16 (7.5)
gG-32 PKZM0-25 25
B1 11-18 gG-25 (11)gG-32 (15)
gG-40 (18.5)
gG-80 PKZM4-63 63
B2 22-30 gG-50 (22)gG-63 (30)
gG-100 NZMB1-A100 100
B3 11-15 gG-25 (11)gG-32 (15)
gG-63 PKZM4-50 50
B4 18.5-30 gG-40 (18.5)gG-50 (22)gG-63 (30)
gG-125 NZMB1-A100 100
C1 37-55 gG-63 (37)gG-100 (45)aR-160 (55)
gG-160 (37-45)aR-250 (55)
NZMB2-A200 160
C2 75 aR-200 (75) aR-250 NZMB2-A250 250
C3 37-45 gG-63 (37)gG-100 (45)
gG-150 NZMB2-A200 150
C4 55-75 aR-160 (55)aR-200 (75)
aR-250 NZMB2-A250 250
Table 8.15 525-600 V, Enclosure Types A, B and C
525-690 V
Enclosure Power [kW] Recommendedfuse size
RecommendedMax. fuse
Recommended circuitbreakerMoeller
Max trip level [A]
A3 1.11.52.234
5.57.5
gG-6gG-6gG-6
gG-10gG-10gG-16gG-16
gG-25gG-25gG-25gG-25gG-25gG-25gG-25
PKZM0-16 16
B2/B4 11151822
gG-25 (11)gG-32 (15)gG-32 (18)gG-40 (22)
gG-63
- -
B4/C2 30 gG-63 (30) gG-80 (30) - -
C2/C3 3745
gG-63 (37)gG-80 (45)
gG-100 (37)gG-125 (45)
- -
C2 5575
gG-100 (55)gG-125 (75)
gG-160 (55-75)- -
Table 8.16 525-690 V, Enclosure Types A, B and C
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
64 MG33AO02 - Rev. 2013-11-07
88
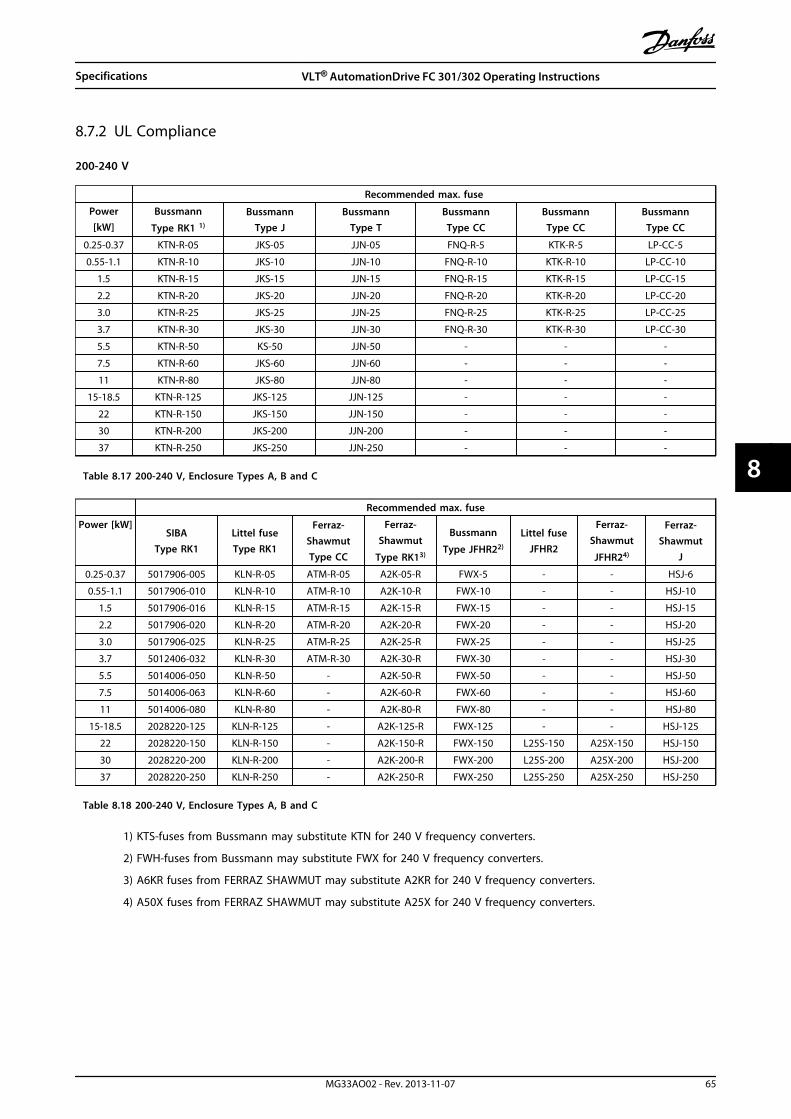
8.7.2 UL Compliance
200-240 V
Recommended max. fuse
Power[kW]
Bussmann
Type RK1 1)
BussmannType J
BussmannType T
BussmannType CC
BussmannType CC
BussmannType CC
0.25-0.37 KTN-R-05 JKS-05 JJN-05 FNQ-R-5 KTK-R-5 LP-CC-5
0.55-1.1 KTN-R-10 JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10
1.5 KTN-R-15 JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15
2.2 KTN-R-20 JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20
3.0 KTN-R-25 JKS-25 JJN-25 FNQ-R-25 KTK-R-25 LP-CC-25
3.7 KTN-R-30 JKS-30 JJN-30 FNQ-R-30 KTK-R-30 LP-CC-30
5.5 KTN-R-50 KS-50 JJN-50 - - -
7.5 KTN-R-60 JKS-60 JJN-60 - - -
11 KTN-R-80 JKS-80 JJN-80 - - -
15-18.5 KTN-R-125 JKS-125 JJN-125 - - -
22 KTN-R-150 JKS-150 JJN-150 - - -
30 KTN-R-200 JKS-200 JJN-200 - - -
37 KTN-R-250 JKS-250 JJN-250 - - -
Table 8.17 200-240 V, Enclosure Types A, B and C
Recommended max. fuse
Power [kW]SIBA
Type RK1Littel fuseType RK1
Ferraz-ShawmutType CC
Ferraz-Shawmut
Type RK13)
Bussmann
Type JFHR22)
Littel fuseJFHR2
Ferraz-Shawmut
JFHR24)
Ferraz-Shawmut
J
0.25-0.37 5017906-005 KLN-R-05 ATM-R-05 A2K-05-R FWX-5 - - HSJ-6
0.55-1.1 5017906-010 KLN-R-10 ATM-R-10 A2K-10-R FWX-10 - - HSJ-10
1.5 5017906-016 KLN-R-15 ATM-R-15 A2K-15-R FWX-15 - - HSJ-15
2.2 5017906-020 KLN-R-20 ATM-R-20 A2K-20-R FWX-20 - - HSJ-20
3.0 5017906-025 KLN-R-25 ATM-R-25 A2K-25-R FWX-25 - - HSJ-25
3.7 5012406-032 KLN-R-30 ATM-R-30 A2K-30-R FWX-30 - - HSJ-30
5.5 5014006-050 KLN-R-50 - A2K-50-R FWX-50 - - HSJ-50
7.5 5014006-063 KLN-R-60 - A2K-60-R FWX-60 - - HSJ-60
11 5014006-080 KLN-R-80 - A2K-80-R FWX-80 - - HSJ-80
15-18.5 2028220-125 KLN-R-125 - A2K-125-R FWX-125 - - HSJ-125
22 2028220-150 KLN-R-150 - A2K-150-R FWX-150 L25S-150 A25X-150 HSJ-150
30 2028220-200 KLN-R-200 - A2K-200-R FWX-200 L25S-200 A25X-200 HSJ-200
37 2028220-250 KLN-R-250 - A2K-250-R FWX-250 L25S-250 A25X-250 HSJ-250
Table 8.18 200-240 V, Enclosure Types A, B and C
1) KTS-fuses from Bussmann may substitute KTN for 240 V frequency converters.
2) FWH-fuses from Bussmann may substitute FWX for 240 V frequency converters.
3) A6KR fuses from FERRAZ SHAWMUT may substitute A2KR for 240 V frequency converters.
4) A50X fuses from FERRAZ SHAWMUT may substitute A25X for 240 V frequency converters.
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 65
8 8

380-500 V
Recommended max. fuse
Power[kW]
BussmannType RK1
BussmannType J
BussmannType T
BussmannType CC
BussmannType CC
BussmannType CC
0.37-1.1 KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6
1.5-2.2 KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10
3 KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15
4 KTS-R-20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20
5.5 KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25
7.5 KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30
11 KTS-R-40 JKS-40 JJS-40 - - -
15 KTS-R-50 JKS-50 JJS-50 - - -
18 KTS-R-60 JKS-60 JJS-60 - - -
22 KTS-R-80 JKS-80 JJS-80 - - -
30 KTS-R-100 JKS-100 JJS-100 - - -
37 KTS-R-125 JKS-125 JJS-125 - - -
45 KTS-R-150 JKS-150 JJS-150 - - -
55 KTS-R-200 JKS-200 JJS-200 - - -
75 KTS-R-250 JKS-250 JJS-250 - - -
Table 8.19 380-500 V, Enclosure Types A, B and C
Recommended max. fuse
Power [kW]SIBA
Type RK1Littel fuseType RK1
Ferraz-ShawmutType CC
Ferraz-ShawmutType RK1
BussmannJFHR2
Ferraz-Shawmut
J
Ferraz-Shawmut
JFHR21)
Littel fuseJFHR2
0.37-1.1 5017906-006 KLS-R-6 ATM-R-6 A6K-6-R FWH-6 HSJ-6 - -
1.5-2.2 5017906-010 KLS-R-10 ATM-R-10 A6K-10-R FWH-10 HSJ-10 - -
3 5017906-016 KLS-R-15 ATM-R-15 A6K-15-R FWH-15 HSJ-15 - -
4 5017906-020 KLS-R-20 ATM-R-20 A6K-20-R FWH-20 HSJ-20 - -
5.5 5017906-025 KLS-R-25 ATM-R-25 A6K-25-R FWH-25 HSJ-25 - -
7.5 5012406-032 KLS-R-30 ATM-R-30 A6K-30-R FWH-30 HSJ-30 - -
11 5014006-040 KLS-R-40 - A6K-40-R FWH-40 HSJ-40 - -
15 5014006-050 KLS-R-50 - A6K-50-R FWH-50 HSJ-50 - -
18 5014006-063 KLS-R-60 - A6K-60-R FWH-60 HSJ-60 - -
22 2028220-100 KLS-R-80 - A6K-80-R FWH-80 HSJ-80 - -
30 2028220-125 KLS-R-100 - A6K-100-R FWH-100 HSJ-100 - -
37 2028220-125 KLS-R-125 - A6K-125-R FWH-125 HSJ-125 - -
45 2028220-160 KLS-R-150 - A6K-150-R FWH-150 HSJ-150 - -
55 2028220-200 KLS-R-200 - A6K-200-R FWH-200 HSJ-200 A50-P-225 L50-S-225
75 2028220-250 KLS-R-250 - A6K-250-R FWH-250 HSJ-250 A50-P-250 L50-S-250
Table 8.20 380-500 V, Enclosure Types A, B and C
1) Ferraz-Shawmut A50QS fuses may substitute for A50P fuses.
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
66 MG33AO02 - Rev. 2013-11-07
88

525-600 V
Recommended max. fuse
Power[kW]
Bussmann
Type RK1
BussmannType J
BussmannType T
BussmannType CC
Bussmann
Type CC
BussmannType CC
SIBAType RK1
Littel fuseType RK1
Ferraz-ShawmutType RK1
Ferraz-Shawmut
J
0.75-1.1 KTS-R-5 JKS-5 JJS-6 FNQ-R-5 KTK-R-5 LP-CC-5 5017906-005 KLS-R-005 A6K-5-R HSJ-6
1.5-2.2 KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 5017906-010 KLS-R-010 A6K-10-R HSJ-10
3 KTS-R15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 5017906-016 KLS-R-015 A6K-15-R HSJ-15
4 KTS-R20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20 5017906-020 KLS-R-020 A6K-20-R HSJ-20
5.5 KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 5017906-025 KLS-R-025 A6K-25-R HSJ-25
7.5 KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30 5017906-030 KLS-R-030 A6K-30-R HSJ-30
11 KTS-R-35 JKS-35 JJS-35 - - - 5014006-040 KLS-R-035 A6K-35-R HSJ-35
15 KTS-R-45 JKS-45 JJS-45 - - - 5014006-050 KLS-R-045 A6K-45-R HSJ-45
18 KTS-R-50 JKS-50 JJS-50 - - - 5014006-050 KLS-R-050 A6K-50-R HSJ-50
22 KTS-R-60 JKS-60 JJS-60 - - - 5014006-063 KLS-R-060 A6K-60-R HSJ-60
30 KTS-R-80 JKS-80 JJS-80 - - - 5014006-080 KLS-R-075 A6K-80-R HSJ-80
37 KTS-R-100 JKS-100 JJS-100 - - - 5014006-100 KLS-R-100 A6K-100-R HSJ-100
45 KTS-R-125 JKS-125 JJS-125 - - - 2028220-125 KLS-R-125 A6K-125-R HSJ-125
55 KTS-R-150 JKS-150 JJS-150 - - - 2028220-150 KLS-R-150 A6K-150-R HSJ-150
75 KTS-R-175 JKS-175 JJS-175 - - - 2028220-200 KLS-R-175 A6K-175-R HSJ-175
Table 8.21 525-600 V, Enclosure Types A, B and C
525-690 V
Recommended max. fuse
Power[kW]
BussmannType RK1
BussmannType J
BussmannType T
BussmannType CC
BussmannType CC
BussmannType CC
[kW]
1.1 KTS-R-5 JKS-5 JJS-6 FNQ-R-5 KTK-R-5 LP-CC-5
1.5-2.2 KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10
3 KTS-R15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15
4 KTS-R20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20
5.5 KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25
7.5 KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30
11 KTS-R-35 JKS-35 JJS-35 - - -
15 KTS-R-45 JKS-45 JJS-45 - - -
18 KTS-R-50 JKS-50 JJS-50 - - -
22 KTS-R-60 JKS-60 JJS-60 - - -
30 KTS-R-80 JKS-80 JJS-80 - - -
37 KTS-R-100 JKS-100 JJS-100 - - -
45 KTS-R-125 JKS-125 JJS-125 - - -
55 KTS-R-150 JKS-150 JJS-150 - - -
75 KTS-R-175 JKS-175 JJS-175 - - -
Table 8.22 525-690 V, Enclosure Types A, B and C
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 67
8 8

Recommended max. fuse
Power [kW]Max.
prefuse
BussmannE52273
RK1/JDDZ
BussmannE4273J/JDDZ
BussmannE4273
T/JDDZ
SIBAE180276
RK1/JDDZ
LittelFuseE81895
RK1/JDDZ
Ferraz-Shawmut
E163267/E2137RK1/JDDZ
Ferraz-Shawmut
E2137J/HSJ
11 30 A KTS-R-30 JKS-30 JKJS-30 5017906-030 KLS-R-030 A6K-30-R HST-30
15-18.5 45 A KTS-R-45 JKS-45 JJS-45 5014006-050 KLS-R-045 A6K-45-R HST-45
22 60 A KTS-R-60 JKS-60 JJS-60 5014006-063 KLS-R-060 A6K-60-R HST-60
30 80 A KTS-R-80 JKS-80 JJS-80 5014006-080 KLS-R-075 A6K-80-R HST-80
37 90 A KTS-R-90 JKS-90 JJS-90 5014006-100 KLS-R-090 A6K-90-R HST-90
45 100 A KTS-R-100 JKS-100 JJS-100 5014006-100 KLS-R-100 A6K-100-R HST-100
55 125 A KTS-R-125 JKS-125 JJS-125 2028220-125 KLS-150 A6K-125-R HST-125
75 150 A KTS-R-150 JKS-150 JJS-150 2028220-150 KLS-175 A6K-150-R HST-150
Table 8.23 525-690 V, Enclosure Types B and C
8.8 Connection Tightening Torques
Torque [Nm]
Enclosure Mains MotorDC
connectionBrake Ground Relay
A2 1.8 1.8 1.8 1.8 3 0.6
A3 1.8 1.8 1.8 1.8 3 0.6
A4 1.8 1.8 1.8 1.8 3 0.6
A5 1.8 1.8 1.8 1.8 3 0.6
B1 1.8 1.8 1.5 1.5 3 0.6
B2 4.5 4.5 3.7 3.7 3 0.6
B3 1.8 1.8 1.8 1.8 3 0.6
B4 4.5 4.5 4.5 4.5 3 0.6
C1 10 10 10 10 3 0.6
C2 14/241) 14/241) 14 14 3 0.6
C3 10 10 10 10 3 0.6
C4 14/24 1) 14/24 1) 14 14 3 0.6
Table 8.24 Tightening Terminals
1) For different cable dimensions x/y, where x ≤ 95 mm2 and y ≥ 95 mm2.
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
68 MG33AO02 - Rev. 2013-11-07
88

8.9 Power Ratings, Weight and Dimensions
Encl
osur
e Ty
peA
1A
2A
3A
4A
5B1
B2B3
B4C1
C2C3
C4D
3h
Rate
dPo
wer
[kW
]
200-
240
V0.
25–1
.50.
25-2
.23-
3.7
0.25
-2.2
0.25
-3.7
5.5-
7.5
115.
5-7.
511
-15
15-2
230
-37
18.5
-22
30-3
7-
380-
480/
500
V0.
37-1
.50.
37-4
.05.
5-7.
50.
37-4
0.37
-7.5
11-1
518
.5-2
211
-15
18.5
-30
30-4
555
-75
37-4
555
-75
-
525-
600
V-
-0.
75-7
.5-
0.75
-7.5
11-1
518
.5-2
211
-15
18.5
-30
30-4
555
-90
37-4
555
-90
-
525-
690
V-
-1.
1-7.
5-
--
11-2
2-
11-3
0-
30-7
537
-45
37-4
555
-75
IP NEM
A20
Chas
sis
20Ch
assi
s21
Type
120
Chas
sis
21Ty
pe 1
55/6
6Ty
pe12
/4X
55/6
6Ty
pe12
/4X
21/5
5/66
Type
1/12
/4X
21/5
5/66
Type
1/12
/4X
20Ch
assi
s20
Chas
sis
21/5
5/66
Type
1/12
/4X
21/5
5/66
Type
1/12
/4X
20Ch
assi
s20
Chas
sis
20Ch
assi
s
Hei
ght
[mm
]
Hei
ght
of b
ack
plat
eA
*20
026
837
526
837
539
042
048
065
039
952
068
077
055
066
090
9
Hei
ght
with
de-
coup
ling
plat
e fo
r Fi
eldb
us c
able
sA
316
374
-37
4-
--
--
420
595
--
630
800
-
Dis
tanc
e be
twee
nm
ount
ing
hol
esa
190
257
350
257
350
401
402
454
624
380
495
648
739
521
631
-
Wid
th [m
m]
Wid
th o
f ba
ck p
late
B75
9090
130
130
200
242
242
242
165
230
308
370
308
370
250
Wid
th o
f ba
ck p
late
with
one
C o
ptio
nB
-13
013
017
017
0-
242
242
242
205
230
308
370
308
370
-
Wid
th o
f ba
ck p
late
with
two
C o
ptio
ns [m
m]
B-
150
150
190
190
-24
224
224
222
523
030
837
030
837
0-
Dis
tanc
e be
twee
nm
ount
ing
hol
esb
6070
7011
011
017
121
521
021
014
020
027
233
427
033
0-
Dep
th [m
m]
Dep
th w
ithou
t op
tion
A/B
C20
720
520
720
520
717
520
026
026
024
924
231
033
533
333
337
5
With
opt
ion
A/B
C22
222
022
222
022
217
520
026
026
026
224
231
033
533
333
337
5
Scre
w h
oles
[mm
]
c6.
08.
08.
08.
08.
08.
258.
2512
128
-12
.512
.5-
--
dø8
ø11
ø11
ø11
ø11
ø12
ø12
ø19
ø19
12-
ø19
ø19
--
-
eø5
ø5.5
ø5.5
ø5.5
ø5.5
ø6.5
ø6.5
ø9ø9
6.8
8.5
ø9ø9
8.5
8.5
-
f5
99
6.5
6.5
69
99
7.9
159.
89.
817
17
Max
wei
ght
[kg]
2.7
4.9
5.3
6.6
7.0
9.7
13.5
/14.
223
2712
23.5
4565
3550
62
Fron
t co
ver
tight
enin
g t
orqu
e [N
m]
Plas
tic c
over
(low
IP)
Clic
kCl
ick
Clic
k-
-Cl
ick
Clic
kCl
ick
Clic
kCl
ick
Clic
k2.
02.
0-
Met
al c
over
(IP5
5/66
)-
--
1.5
1.5
2.2
2.2
--
2.2
2.2
2.0
2.0
-
* Se
e Ill
ustr
atio
n 3.
4 an
d Il
lust
ratio
n 3.
5 fo
r to
p a
nd b
otto
m m
ount
ing
hol
es.
Tabl
e 8.
25 P
ower
Rat
ings
, Wei
ght
and
Dim
ensi
ons
Specifications VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 69
8 8

9 Appendix
9.1 Symbols, Abbreviations and Conventions
9.1.1 Symbols, Abbreviations and Conventions
AC Alternating Current
AEO Automatic Energy Optimization
AWG American Wire Gauge
AMA Automatic Motor Adaptation
°C Degrees Celsius
DC Direct Current
EMC Electro Magnetic Compatibility
ETR Electronic Thermal Relay
FC Frequency Converter
LCP Local Control Panel
MCT Motion Control Tool
IP Ingress Protection
IM,N Nominal Motor Current
fM,N Nominal Motor Frequency
PM,N Nominal Motor Power
UM,N Nominal Motor Voltage
PM Motor Permanent Magnet Motor
PELV Protective Extra Low Voltage
PCB Printed Circuit Board
PWM Pulse Width Modulated
ILIM Current Limit
IINV Rated Inverter Output Current
RPM Revolutions Per Minute
Regen Regenerative Terminals
ns Synchronous Motor Speed
TLIM Torque Limit
IVLT,MAX The Maximum Output Current
IVLT,N The Rated Output Current Supplied by the Frequency Converter
Table 9.1 Symbols and Abbreviations
ConventionsNumbered lists indicate procedures.Bullet lists indicate other information and description of illustrations.Italicised text indicates
• cross reference
• link
• parameter name
9.2 Parameter Menu Structure
Appendix VLT® AutomationDrive FC 301/302 Operating Instructions
70 MG33AO02 - Rev. 2013-11-07
99

0-**
Ope
ratio
n /
Dis
play
0-0*
Basi
c Se
ttin
gs0-
01La
ngua
ge0-
02M
otor
Spe
ed U
nit
0-03
Regi
onal
Set
tings
0-04
Ope
ratin
g S
tate
at
Pow
er-u
p (H
and)
0-09
Perf
orm
ance
Mon
itor
0-1*
Set-
up O
pera
tions
0-10
Act
ive
Set-
up0-
11Ed
it S
et-u
p0-
12Th
is S
et-u
p L
inke
d t
o0-
13Re
adou
t: L
inke
d S
et-u
ps0-
14Re
adou
t: E
dit
Set-
ups
/ Ch
anne
l0-
15Re
adou
t: a
ctua
l set
up0-
2*LC
P D
ispl
ay0-
20D
ispl
ay L
ine
1.1
Smal
l0-
21D
ispl
ay L
ine
1.2
Smal
l0-
22D
ispl
ay L
ine
1.3
Smal
l0-
23D
ispl
ay L
ine
2 La
rge
0-24
Dis
play
Lin
e 3
Larg
e0-
25M
y Pe
rson
al M
enu
0-3*
LCP
Cus
tom
Rea
dout
0-30
Uni
t fo
r U
ser-
defin
ed R
eado
ut0-
31M
in V
alue
of
Use
r-de
fined
Rea
dout
0-32
Max
Val
ue o
f U
ser-
defin
ed R
eado
ut0-
37D
ispl
ay T
ext
10-
38D
ispl
ay T
ext
20-
39D
ispl
ay T
ext
30-
4*LC
P K
eypa
d0-
40[H
and
on]
Key
on
LCP
0-41
[Off]
Key
on
LCP
0-42
[Aut
o o
n] K
ey o
n L
CP0-
43[R
eset
] Ke
y on
LCP
0-44
[Off/
Rese
t] K
ey o
n L
CP0-
45[D
rive
Bypa
ss]
Key
on L
CP0-
5*Co
py/S
ave
0-50
LCP
Cop
y0-
51Se
t-up
Cop
y0-
6*Pa
ssw
ord
0-60
Mai
n M
enu
Pas
swor
d0-
61A
cces
s to
Mai
n M
enu
w/o
Pas
swor
d0-
65Q
uick
Men
u P
assw
ord
0-66
Acc
ess
to Q
uick
Men
u w
/o P
assw
ord
0-67
Bus
Pass
wor
d A
cces
s0-
68Sa
fety
Par
amet
ers
Pass
wor
d0-
69Pa
ssw
ord
Pro
tect
ion
of
Safe
tyPa
ram
eter
s1-
**Lo
ad a
nd M
otor
1-0*
Gen
eral
Set
tings
1-00
Conf
igur
atio
n M
ode
1-01
Mot
or C
ontr
ol P
rinci
ple
1-02
Flux
Mot
or F
eedb
ack
Sour
ce1-
03To
rque
Cha
ract
eris
tics
1-04
Ove
rload
Mod
e1-
05Lo
cal M
ode
Conf
igur
atio
n1-
06Cl
ockw
ise
Dire
ctio
n1-
07M
otor
Ang
le O
ffset
Adj
ust
1-1*
Spec
ial S
ettin
gs1-
10M
otor
Con
stru
ctio
n
1-11
Mot
or M
odel
1-14
Dam
ping
Gai
n1-
15Lo
w S
peed
Filt
er T
ime
Cons
t.1-
16H
igh
Spe
ed F
ilter
Tim
e Co
nst.
1-17
Volta
ge fi
lter
time
cons
t.1-
2*M
otor
Dat
a1-
20M
otor
Pow
er [k
W]
1-21
Mot
or P
ower
[HP]
1-22
Mot
or V
olta
ge1-
23M
otor
Fre
quen
cy1-
24M
otor
Cur
rent
1-25
Mot
or N
omin
al S
peed
1-26
Mot
or C
ont.
Rat
ed T
orqu
e1-
29A
utom
atic
Mot
or A
dapt
atio
n (A
MA
)1-
3*A
dv. M
otor
Dat
a1-
30St
ator
Res
ista
nce
(Rs)
1-31
Roto
r Re
sist
ance
(Rr)
1-33
Stat
or L
eaka
ge R
eact
ance
(X1)
1-34
Roto
r Le
akag
e Re
acta
nce
(X2)
1-35
Mai
n R
eact
ance
(Xh)
1-36
Iron
Los
s Re
sist
ance
(Rfe
)1-
37d-
axis
Indu
ctan
ce (L
d)1-
38q-
axis
Indu
ctan
ce (L
q)1-
39M
otor
Pol
es1-
40Ba
ck E
MF
at 1
000
RPM
1-41
Mot
or A
ngle
Offs
et1-
44d-
axis
Indu
ctan
ce S
at. (
LdSa
t)1-
45q-
axis
Indu
ctan
ce S
at. (
LqSa
t)1-
46Po
sitio
n D
etec
tion
Gai
n1-
47Lo
w S
peed
Tor
que
Calib
ratio
n1-
48In
duct
ance
Sat
. Poi
nt1-
5*Lo
ad In
dep.
Set
ting
1-50
Mot
or M
agne
tisat
ion
at
Zero
Spe
ed1-
51M
in S
peed
Nor
mal
Mag
netis
ing
[RPM
]1-
52M
in S
peed
Nor
mal
Mag
netis
ing
[Hz]
1-53
Mod
el S
hift
Fre
quen
cy1-
54Vo
ltage
red
uctio
n in
fiel
dwea
keni
ng1-
55U
/f C
hara
cter
istic
- U
1-56
U/f
Cha
ract
eris
tic -
F1-
58Fl
ysta
rt T
est
Puls
es C
urre
nt1-
59Fl
ysta
rt T
est
Puls
es F
requ
ency
1-6*
Load
Dep
en. S
ettin
g1-
60Lo
w S
peed
Loa
d C
ompe
nsat
ion
1-61
Hig
h S
peed
Loa
d C
ompe
nsat
ion
1-62
Slip
Com
pens
atio
n1-
63Sl
ip C
ompe
nsat
ion
Tim
e Co
nsta
nt1-
64Re
sona
nce
Dam
peni
ng1-
65Re
sona
nce
Dam
peni
ng T
ime
Cons
tant
1-66
Min
. Cur
rent
at
Low
Spe
ed1-
67Lo
ad T
ype
1-68
Min
imum
Iner
tia1-
69M
axim
um In
ertia
1-7*
Star
t A
djus
tmen
ts1-
70PM
Sta
rt M
ode
1-71
Star
t D
elay
1-72
Star
t Fu
nctio
n1-
73Fl
ying
Sta
rt1-
74St
art
Spee
d [R
PM]
1-75
Star
t Sp
eed
[Hz]
1-76
Star
t Cu
rren
t1-
8*St
op A
djus
tmen
ts1-
80Fu
nctio
n a
t St
op1-
81M
in S
peed
for
Func
tion
at
Stop
[RPM
]1-
82M
in S
peed
for
Func
tion
at
Stop
[Hz]
1-83
Prec
ise
Stop
Fun
ctio
n1-
84Pr
ecis
e St
op C
ount
er V
alue
1-85
Prec
ise
Stop
Spe
ed C
ompe
nsat
ion
Del
ay1-
9*M
otor
Tem
pera
ture
1-90
Mot
or T
herm
al P
rote
ctio
n1-
91M
otor
Ext
erna
l Fan
1-93
Ther
mis
tor
Reso
urce
1-94
ATE
X E
TR c
ur.li
m. s
peed
red
uctio
n1-
95KT
Y S
enso
r Ty
pe1-
96KT
Y T
herm
isto
r Re
sour
ce1-
97KT
Y T
hres
hold
leve
l1-
98A
TEX
ETR
inte
rpol
. poi
nts
freq
.1-
99A
TEX
ETR
inte
rpol
poi
nts
curr
ent
2-**
Brak
es2-
0*D
C-Br
ake
2-00
DC
Hol
d C
urre
nt2-
01D
C B
rake
Cur
rent
2-02
DC
Bra
king
Tim
e2-
03D
C B
rake
Cut
In S
peed
[RPM
]2-
04D
C B
rake
Cut
In S
peed
[Hz]
2-05
Max
imum
Ref
eren
ce2-
06Pa
rkin
g C
urre
nt2-
07Pa
rkin
g T
ime
2-1*
Brak
e En
ergy
Fun
ct.
2-10
Brak
e Fu
nctio
n2-
11Br
ake
Resi
stor
(ohm
)2-
12Br
ake
Pow
er L
imit
(kW
)2-
13Br
ake
Pow
er M
onito
ring
2-15
Brak
e Ch
eck
2-16
AC
bra
ke M
ax. C
urre
nt2-
17O
ver-
volta
ge C
ontr
ol2-
18Br
ake
Chec
k Co
nditi
on2-
19O
ver-
volta
ge G
ain
2-2*
Mec
hani
cal B
rake
2-20
Rele
ase
Brak
e Cu
rren
t2-
21A
ctiv
ate
Brak
e Sp
eed
[RPM
]2-
22A
ctiv
ate
Brak
e Sp
eed
[Hz]
2-23
Act
ivat
e Br
ake
Del
ay2-
24St
op D
elay
2-25
Brak
e Re
leas
e Ti
me
2-26
Torq
ue R
ef2-
27To
rque
Ram
p T
ime
2-28
Gai
n B
oost
Fac
tor
2-29
Torq
ue R
amp
Dow
n T
ime
2-30
Posi
tion
P S
tart
Pro
port
iona
l Gai
n2-
31Sp
eed
PID
Sta
rt P
ropo
rtio
nal G
ain
2-32
Spee
d P
ID S
tart
Inte
gral
Tim
e2-
33Sp
eed
PID
Sta
rt L
owpa
ss F
ilter
Tim
e3-
**Re
fere
nce
/ Ra
mps
3-0*
Refe
renc
e Li
mits
3-00
Refe
renc
e Ra
nge
3-01
Refe
renc
e/Fe
edba
ck U
nit
3-02
Min
imum
Ref
eren
ce
3-03
Max
imum
Ref
eren
ce3-
04Re
fere
nce
Func
tion
3-1*
Refe
renc
es3-
10Pr
eset
Ref
eren
ce3-
11Jo
g S
peed
[Hz]
3-12
Catc
h u
p/sl
ow D
own
Val
ue3-
13Re
fere
nce
Site
3-14
Pres
et R
elat
ive
Refe
renc
e3-
15Re
fere
nce
Reso
urce
13-
16Re
fere
nce
Reso
urce
23-
17Re
fere
nce
Reso
urce
33-
18Re
lativ
e Sc
alin
g R
efer
ence
Res
ourc
e3-
19Jo
g S
peed
[RPM
]3-
4*Ra
mp
13-
40Ra
mp
1 T
ype
3-41
Ram
p 1
Ram
p U
p T
ime
3-42
Ram
p 1
Ram
p D
own
Tim
e3-
45Ra
mp
1 S
-ram
p R
atio
at
Acc
el. S
tart
3-46
Ram
p 1
S-r
amp
Rat
io a
t A
ccel
. End
3-47
Ram
p 1
S-r
amp
Rat
io a
t D
ecel
. Sta
rt3-
48Ra
mp
1 S
-ram
p R
atio
at
Dec
el. E
nd3-
5*Ra
mp
23-
50Ra
mp
2 T
ype
3-51
Ram
p 2
Ram
p U
p T
ime
3-52
Ram
p 2
Ram
p D
own
Tim
e3-
55Ra
mp
2 S
-ram
p R
atio
at
Acc
el. S
tart
3-56
Ram
p 2
S-r
amp
Rat
io a
t A
ccel
. End
3-57
Ram
p 2
S-r
amp
Rat
io a
t D
ecel
. Sta
rt3-
58Ra
mp
2 S
-ram
p R
atio
at
Dec
el. E
nd3-
6*Ra
mp
33-
60Ra
mp
3 T
ype
3-61
Ram
p 3
Ram
p u
p T
ime
3-62
Ram
p 3
Ram
p d
own
Tim
e3-
65Ra
mp
3 S
-ram
p R
atio
at
Acc
el. S
tart
3-66
Ram
p 3
S-r
amp
Rat
io a
t A
ccel
. End
3-67
Ram
p 3
S-r
amp
Rat
io a
t D
ecel
. Sta
rt3-
68Ra
mp
3 S
-ram
p R
atio
at
Dec
el. E
nd3-
7*Ra
mp
43-
70Ra
mp
4 T
ype
3-71
Ram
p 4
Ram
p u
p T
ime
3-72
Ram
p 4
Ram
p D
own
Tim
e3-
75Ra
mp
4 S
-ram
p R
atio
at
Acc
el. S
tart
3-76
Ram
p 4
S-r
amp
Rat
io a
t A
ccel
. End
3-77
Ram
p 4
S-r
amp
Rat
io a
t D
ecel
. Sta
rt3-
78Ra
mp
4 S
-ram
p R
atio
at
Dec
el. E
nd3-
8*O
ther
Ram
ps3-
80Jo
g R
amp
Tim
e3-
81Q
uick
Sto
p R
amp
Tim
e3-
82Q
uick
Sto
p R
amp
Typ
e3-
83Q
uick
Sto
p S
-ram
p R
atio
at
Dec
el. S
tart
3-84
Qui
ck S
top
S-r
amp
Rat
io a
t D
ecel
. End
3-9*
Dig
ital P
ot.M
eter
3-90
Step
Siz
e3-
91Ra
mp
Tim
e3-
92Po
wer
Res
tore
3-93
Max
imum
Lim
it3-
94M
inim
um L
imit
3-95
Ram
p D
elay
4-**
Lim
its /
War
ning
s
4-1*
Mot
or L
imits
4-10
Mot
or S
peed
Dire
ctio
n4-
11M
otor
Spe
ed L
ow L
imit
[RPM
]4-
12M
otor
Spe
ed L
ow L
imit
[Hz]
4-13
Mot
or S
peed
Hig
h L
imit
[RPM
]4-
14M
otor
Spe
ed H
igh
Lim
it [H
z]4-
16To
rque
Lim
it M
otor
Mod
e4-
17To
rque
Lim
it G
ener
ator
Mod
e4-
18Cu
rren
t Li
mit
4-19
Max
Out
put
Freq
uenc
y4-
2*Li
mit
Fac
tors
4-20
Torq
ue L
imit
Fac
tor
Sour
ce4-
21Sp
eed
Lim
it F
acto
r So
urce
4-3*
Mot
or S
peed
Mon
.4-
30M
otor
Fee
dbac
k Lo
ss F
unct
ion
4-31
Mot
or F
eedb
ack
Spee
d E
rror
4-32
Mot
or F
eedb
ack
Loss
Tim
eout
4-34
Trac
king
Err
or F
unct
ion
4-35
Trac
king
Err
or4-
36Tr
acki
ng E
rror
Tim
eout
4-37
Trac
king
Err
or R
ampi
ng4-
38Tr
acki
ng E
rror
Ram
ping
Tim
eout
4-39
Trac
king
Err
or A
fter
Ram
ping
Tim
eout
4-5*
Adj
. War
ning
s4-
50W
arni
ng C
urre
nt L
ow4-
51W
arni
ng C
urre
nt H
igh
4-52
War
ning
Spe
ed L
ow4-
53W
arni
ng S
peed
Hig
h4-
54W
arni
ng R
efer
ence
Low
4-55
War
ning
Ref
eren
ce H
igh
4-56
War
ning
Fee
dbac
k Lo
w4-
57W
arni
ng F
eedb
ack
Hig
h4-
58M
issi
ng M
otor
Pha
se F
unct
ion
4-6*
Spee
d B
ypas
s4-
60By
pass
Spe
ed F
rom
[RPM
]4-
61By
pass
Spe
ed F
rom
[Hz]
4-62
Bypa
ss S
peed
To
[RPM
]4-
63By
pass
Spe
ed T
o [H
z]5-
**D
igita
l In/
Out
5-0*
Dig
ital I
/O m
ode
5-00
Dig
ital I
/O M
ode
5-01
Term
inal
27
Mod
e5-
02Te
rmin
al 2
9 M
ode
5-1*
Dig
ital I
nput
s5-
10Te
rmin
al 1
8 D
igita
l Inp
ut5-
11Te
rmin
al 1
9 D
igita
l Inp
ut5-
12Te
rmin
al 2
7 D
igita
l Inp
ut5-
13Te
rmin
al 2
9 D
igita
l Inp
ut5-
14Te
rmin
al 3
2 D
igita
l Inp
ut5-
15Te
rmin
al 3
3 D
igita
l Inp
ut5-
16Te
rmin
al X
30/2
Dig
ital I
nput
5-17
Term
inal
X30
/3 D
igita
l Inp
ut5-
18Te
rmin
al X
30/4
Dig
ital I
nput
5-19
Term
inal
37
Safe
Sto
p5-
20Te
rmin
al X
46/1
Dig
ital I
nput
5-21
Term
inal
X46
/3 D
igita
l Inp
ut5-
22Te
rmin
al X
46/5
Dig
ital I
nput
5-23
Term
inal
X46
/7 D
igita
l Inp
ut5-
24Te
rmin
al X
46/9
Dig
ital I
nput
Appendix VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 71
9 9

5-25
Term
inal
X46
/11
Dig
ital I
nput
5-26
Term
inal
X46
/13
Dig
ital I
nput
5-3*
Dig
ital O
utpu
ts5-
30Te
rmin
al 2
7 D
igita
l Out
put
5-31
Term
inal
29
Dig
ital O
utpu
t5-
32Te
rm X
30/6
Dig
i Out
(MCB
101
)5-
33Te
rm X
30/7
Dig
i Out
(MCB
101
)5-
4*Re
lays
5-40
Func
tion
Rel
ay5-
41O
n D
elay
, Rel
ay5-
42O
ff D
elay
, Rel
ay5-
5*Pu
lse
Inpu
t5-
50Te
rm. 2
9 Lo
w F
requ
ency
5-51
Term
. 29
Hig
h F
requ
ency
5-52
Term
. 29
Low
Ref
./Fee
db. V
alue
5-53
Term
. 29
Hig
h R
ef./F
eedb
. Val
ue5-
54Pu
lse
Filte
r Ti
me
Cons
tant
#29
5-55
Term
. 33
Low
Fre
quen
cy5-
56Te
rm. 3
3 H
igh
Fre
quen
cy5-
57Te
rm. 3
3 Lo
w R
ef./F
eedb
. Val
ue5-
58Te
rm. 3
3 H
igh
Ref
./Fee
db. V
alue
5-59
Puls
e Fi
lter
Tim
e Co
nsta
nt #
335-
6*Pu
lse
Out
put
5-60
Term
inal
27
Puls
e O
utpu
t Va
riabl
e5-
62Pu
lse
Out
put
Max
Fre
q #
275-
63Te
rmin
al 2
9 Pu
lse
Out
put
Varia
ble
5-65
Puls
e O
utpu
t M
ax F
req
#29
5-66
Term
inal
X30
/6 P
ulse
Out
put
Varia
ble
5-68
Puls
e O
utpu
t M
ax F
req
#X3
0/6
5-7*
24V
Enc
oder
Inpu
t5-
70Te
rm 3
2/33
Pul
ses
Per
Revo
lutio
n5-
71Te
rm 3
2/33
Enc
oder
Dire
ctio
n5-
8*I/O
Opt
ions
5-80
AH
F Ca
p R
econ
nect
Del
ay5-
9*Bu
s Co
ntro
lled
5-90
Dig
ital &
Rel
ay B
us C
ontr
ol5-
93Pu
lse
Out
#27
Bus
Con
trol
5-94
Puls
e O
ut #
27 T
imeo
ut P
rese
t5-
95Pu
lse
Out
#29
Bus
Con
trol
5-96
Puls
e O
ut #
29 T
imeo
ut P
rese
t5-
97Pu
lse
Out
#X3
0/6
Bus
Cont
rol
5-98
Puls
e O
ut #
X30/
6 Ti
meo
ut P
rese
t6-
**A
nalo
g In
/Out
6-0*
Ana
log
I/O
Mod
e6-
00Li
ve Z
ero
Tim
eout
Tim
e6-
01Li
ve Z
ero
Tim
eout
Fun
ctio
n6-
1*A
nalo
g In
put
16-
10Te
rmin
al 5
3 Lo
w V
olta
ge6-
11Te
rmin
al 5
3 H
igh
Vol
tage
6-12
Term
inal
53
Low
Cur
rent
6-13
Term
inal
53
Hig
h C
urre
nt6-
14Te
rmin
al 5
3 Lo
w R
ef./F
eedb
. Val
ue6-
15Te
rmin
al 5
3 H
igh
Ref
./Fee
db. V
alue
6-16
Term
inal
53
Filte
r Ti
me
Cons
tant
6-2*
Ana
log
Inpu
t 2
6-20
Term
inal
54
Low
Vol
tage
6-21
Term
inal
54
Hig
h V
olta
ge6-
22Te
rmin
al 5
4 Lo
w C
urre
nt6-
23Te
rmin
al 5
4 H
igh
Cur
rent
6-24
Term
inal
54
Low
Ref
./Fee
db. V
alue
6-25
Term
inal
54
Hig
h R
ef./F
eedb
. Val
ue6-
26Te
rmin
al 5
4 Fi
lter
Tim
e Co
nsta
nt6-
3*A
nalo
g In
put
36-
30Te
rmin
al X
30/1
1 Lo
w V
olta
ge6-
31Te
rmin
al X
30/1
1 H
igh
Vol
tage
6-34
Term
. X30
/11
Low
Ref
./Fee
db. V
alue
6-35
Term
. X30
/11
Hig
h R
ef./F
eedb
. Val
ue6-
36Te
rm. X
30/1
1 Fi
lter
Tim
e Co
nsta
nt6-
4*A
nalo
g In
put
46-
40Te
rmin
al X
30/1
2 Lo
w V
olta
ge6-
41Te
rmin
al X
30/1
2 H
igh
Vol
tage
6-44
Term
. X30
/12
Low
Ref
./Fee
db. V
alue
6-45
Term
. X30
/12
Hig
h R
ef./F
eedb
. Val
ue6-
46Te
rm. X
30/1
2 Fi
lter
Tim
e Co
nsta
nt6-
5*A
nalo
g O
utpu
t 1
6-50
Term
inal
42
Out
put
6-51
Term
inal
42
Out
put
Min
Sca
le6-
52Te
rmin
al 4
2 O
utpu
t M
ax S
cale
6-53
Term
42
Out
put
Bus
Ctrl
6-54
Term
inal
42
Out
put
Tim
eout
Pre
set
6-55
Ana
log
Out
put
Filte
r6-
6*A
nalo
g O
utpu
t 2
6-60
Term
inal
X30
/8 O
utpu
t6-
61Te
rmin
al X
30/8
Min
. Sca
le6-
62Te
rmin
al X
30/8
Max
. Sca
le6-
63Te
rmin
al X
30/8
Bus
Con
trol
6-64
Term
inal
X30
/8 O
utpu
t Ti
meo
ut P
rese
t6-
7*A
nalo
g O
utpu
t 3
6-70
Term
inal
X45
/1 O
utpu
t6-
71Te
rmin
al X
45/1
Min
. Sca
le6-
72Te
rmin
al X
45/1
Max
. Sca
le6-
73Te
rmin
al X
45/1
Bus
Con
trol
6-74
Term
inal
X45
/1 O
utpu
t Ti
meo
ut P
rese
t6-
8*A
nalo
g O
utpu
t 4
6-80
Term
inal
X45
/3 O
utpu
t6-
81Te
rmin
al X
45/3
Min
. Sca
le6-
82Te
rmin
al X
45/3
Max
. Sca
le6-
83Te
rmin
al X
45/3
Bus
Con
trol
6-84
Term
inal
X45
/3 O
utpu
t Ti
meo
ut P
rese
t7-
**Co
ntro
llers
7-0*
Spee
d P
ID C
trl.
7-00
Spee
d P
ID F
eedb
ack
Sour
ce7-
02Sp
eed
PID
Pro
port
iona
l Gai
n7-
03Sp
eed
PID
Inte
gral
Tim
e7-
04Sp
eed
PID
Diff
eren
tiatio
n T
ime
7-05
Spee
d P
ID D
iff. G
ain
Lim
it7-
06Sp
eed
PID
Low
pass
Filt
er T
ime
7-07
Spee
d P
ID F
eedb
ack
Gea
r Ra
tio7-
08Sp
eed
PID
Fee
d F
orw
ard
Fac
tor
7-09
Spee
d P
ID E
rror
Cor
rect
ion
w/
Ram
p7-
1*To
rque
PI
Ctrl
.7-
12To
rque
PI P
ropo
rtio
nal G
ain
7-13
Torq
ue P
I Int
egra
tion
Tim
e7-
2*Pr
oces
s Ct
rl. F
eedb
7-20
Proc
ess
CL F
eedb
ack
1 Re
sour
ce7-
22Pr
oces
s CL
Fee
dbac
k 2
Reso
urce
7-3*
Proc
ess
PID
Ctr
l.7-
30Pr
oces
s PI
D N
orm
al/
Inve
rse
Cont
rol
7-31
Proc
ess
PID
Ant
i Win
dup
7-32
Proc
ess
PID
Sta
rt S
peed
7-33
Proc
ess
PID
Pro
port
iona
l Gai
n7-
34Pr
oces
s PI
D In
tegr
al T
ime
7-35
Proc
ess
PID
Diff
eren
tiatio
n T
ime
7-36
Proc
ess
PID
Diff
. Gai
n L
imit
7-38
Proc
ess
PID
Fee
d F
orw
ard
Fac
tor
7-39
On
Ref
eren
ce B
andw
idth
7-4*
Adv
. Pro
cess
PID
I7-
40Pr
oces
s PI
D I-
part
Res
et7-
41Pr
oces
s PI
D O
utpu
t N
eg. C
lam
p7-
42Pr
oces
s PI
D O
utpu
t Po
s. C
lam
p7-
43Pr
oces
s PI
D G
ain
Sca
le a
t M
in. R
ef.
7-44
Proc
ess
PID
Gai
n S
cale
at
Max
. Ref
.7-
45Pr
oces
s PI
D F
eed
Fw
d R
esou
rce
7-46
Proc
ess
PID
Fee
d F
wd
Nor
mal
/ In
v.Ct
rl.7-
48PC
D F
eed
For
war
d7-
49Pr
oces
s PI
D O
utpu
t N
orm
al/
Inv.
Ctr
l.7-
5*A
dv. P
roce
ss P
ID II
7-50
Proc
ess
PID
Ext
ende
d P
ID7-
51Pr
oces
s PI
D F
eed
Fw
d G
ain
7-52
Proc
ess
PID
Fee
d F
wd
Ram
p u
p7-
53Pr
oces
s PI
D F
eed
Fw
d R
amp
dow
n7-
56Pr
oces
s PI
D R
ef. F
ilter
Tim
e7-
57Pr
oces
s PI
D F
b. F
ilter
Tim
e8-
**Co
mm
. and
Opt
ions
8-0*
Gen
eral
Set
tings
8-01
Cont
rol S
ite8-
02Co
ntro
l Wor
d S
ourc
e8-
03Co
ntro
l Wor
d T
imeo
ut T
ime
8-04
Cont
rol W
ord
Tim
eout
Fun
ctio
n8-
05En
d-of
-Tim
eout
Fun
ctio
n8-
06Re
set
Cont
rol W
ord
Tim
eout
8-07
Dia
gnos
is T
rigge
r8-
08Re
adou
t Fi
lterin
g8-
1*Ct
rl. W
ord
Set
tings
8-10
Cont
rol W
ord
Pro
file
8-13
Conf
igur
able
Sta
tus
Wor
d S
TW8-
14Co
nfig
urab
le C
ontr
ol W
ord
CTW
8-17
Conf
igur
able
Ala
rm a
nd W
arni
ng W
ord
8-19
Prod
uct
Code
8-3*
FC P
ort
Sett
ings
8-30
Prot
ocol
8-31
Add
ress
8-32
FC P
ort
Baud
Rat
e8-
33Pa
rity
/ St
op B
its8-
34Es
timat
ed c
ycle
tim
e8-
35M
inim
um R
espo
nse
Del
ay8-
36M
ax R
espo
nse
Del
ay8-
37M
ax In
ter-
Char
Del
ay8-
4*FC
MC
pro
toco
l set
8-40
Tele
gram
Sel
ectio
n8-
41Pa
ram
eter
s fo
r Si
gnal
s8-
42PC
D W
rite
Conf
igur
atio
n8-
43PC
D R
ead
Con
figur
atio
n8-
5*D
igita
l/Bus
8-50
Coas
ting
Sel
ect
8-51
Qui
ck S
top
Sel
ect
8-52
DC
Bra
ke S
elec
t8-
53St
art
Sele
ct8-
54Re
vers
ing
Sel
ect
8-55
Set-
up S
elec
t8-
56Pr
eset
Ref
eren
ce S
elec
t8-
57Pr
ofid
rive
OFF
2 Se
lect
8-58
Prof
idriv
e O
FF3
Sele
ct8-
8*FC
Por
t D
iagn
ostic
s8-
80Bu
s M
essa
ge C
ount
8-81
Bus
Erro
r Co
unt
8-82
Slav
e M
essa
ges
Rcvd
8-83
Slav
e Er
ror
Coun
t8-
9*Bu
s Jo
g8-
90Bu
s Jo
g 1
Spe
ed8-
91Bu
s Jo
g 2
Spe
ed9-
**PR
OFI
driv
e9-
00Se
tpoi
nt9-
07A
ctua
l Val
ue9-
15PC
D W
rite
Conf
igur
atio
n9-
16PC
D R
ead
Con
figur
atio
n9-
18N
ode
Add
ress
9-22
Tele
gram
Sel
ectio
n9-
23Pa
ram
eter
s fo
r Si
gnal
s9-
27Pa
ram
eter
Edi
t9-
28Pr
oces
s Co
ntro
l9-
44Fa
ult
Mes
sage
Cou
nter
9-45
Faul
t Co
de9-
47Fa
ult
Num
ber
9-52
Faul
t Si
tuat
ion
Cou
nter
9-53
Prof
ibus
War
ning
Wor
d9-
63A
ctua
l Bau
d R
ate
9-64
Dev
ice
Iden
tific
atio
n9-
65Pr
ofile
Num
ber
9-67
Cont
rol W
ord
19-
68St
atus
Wor
d 1
9-71
Prof
ibus
Sav
e D
ata
Valu
es9-
72Pr
ofib
usD
riveR
eset
9-75
DO
Iden
tific
atio
n9-
80D
efin
ed P
aram
eter
s (1
)9-
81D
efin
ed P
aram
eter
s (2
)9-
82D
efin
ed P
aram
eter
s (3
)9-
83D
efin
ed P
aram
eter
s (4
)9-
84D
efin
ed P
aram
eter
s (5
)9-
90Ch
ange
d P
aram
eter
s (1
)9-
91Ch
ange
d P
aram
eter
s (2
)9-
92Ch
ange
d P
aram
eter
s (3
)9-
93Ch
ange
d P
aram
eter
s (4
)9-
94Ch
ange
d P
aram
eter
s (5
)9-
99Pr
ofib
us R
evis
ion
Cou
nter
10-*
*CA
N F
ield
bus
10-0
*Co
mm
on S
ettin
gs10
-00
CAN
Pro
toco
l10
-01
Baud
Rat
e Se
lect
10-0
2M
AC
ID10
-05
Read
out
Tran
smit
Err
or C
ount
er10
-06
Read
out
Rece
ive
Erro
r Co
unte
r10
-07
Read
out
Bus
Off
Cou
nter
10-1
*D
evic
eNet
10-1
0Pr
oces
s D
ata
Type
Sel
ectio
n
10-1
1Pr
oces
s D
ata
Conf
ig W
rite
10-1
2Pr
oces
s D
ata
Conf
ig R
ead
10-1
3W
arni
ng P
aram
eter
10-1
4N
et R
efer
ence
10-1
5N
et C
ontr
ol10
-2*
COS
Filte
rs10
-20
COS
Filte
r 1
10-2
1CO
S Fi
lter
210
-22
COS
Filte
r 3
10-2
3CO
S Fi
lter
410
-3*
Para
met
er A
cces
s10
-30
Arr
ay In
dex
10-3
1St
ore
Dat
a Va
lues
10-3
2D
evic
enet
Rev
isio
n10
-33
Stor
e A
lway
s10
-34
Dev
iceN
et P
rodu
ct C
ode
10-3
9D
evic
enet
F P
aram
eter
s10
-5*
CAN
open
10-5
0Pr
oces
s D
ata
Conf
ig W
rite.
10-5
1Pr
oces
s D
ata
Conf
ig R
ead.
12-*
*Et
hern
et12
-0*
IP S
ettin
gs12
-00
IP A
ddre
ss A
ssig
nmen
t12
-01
IP A
ddre
ss12
-02
Subn
et M
ask
12-0
3D
efau
lt G
atew
ay12
-04
DH
CP S
erve
r12
-05
Leas
e Ex
pire
s12
-06
Nam
e Se
rver
s12
-07
Dom
ain
Nam
e12
-08
Hos
t N
ame
12-0
9Ph
ysic
al A
ddre
ss12
-1*
Ethe
rnet
Lin
k Pa
ram
eter
s12
-10
Link
Sta
tus
12-1
1Li
nk D
urat
ion
12-1
2A
uto
Neg
otia
tion
12-1
3Li
nk S
peed
12-1
4Li
nk D
uple
x12
-2*
Proc
ess
Dat
a12
-20
Cont
rol I
nsta
nce
12-2
1Pr
oces
s D
ata
Conf
ig W
rite
12-2
2Pr
oces
s D
ata
Conf
ig R
ead
12-2
3Pr
oces
s D
ata
Conf
ig W
rite
Size
12-2
4Pr
oces
s D
ata
Conf
ig R
ead
Siz
e12
-27
Mas
ter
Add
ress
12-2
8St
ore
Dat
a Va
lues
12-2
9St
ore
Alw
ays
12-3
*Et
herN
et/IP
12-3
0W
arni
ng P
aram
eter
12-3
1N
et R
efer
ence
12-3
2N
et C
ontr
ol12
-33
CIP
Rev
isio
n12
-34
CIP
Pro
duct
Cod
e12
-35
EDS
Para
met
er12
-37
COS
Inhi
bit
Tim
er12
-38
COS
Filte
r12
-4*
Mod
bus
TCP
12-4
0St
atus
Par
amet
er12
-41
Slav
e M
essa
ge C
ount
Appendix VLT® AutomationDrive FC 301/302 Operating Instructions
72 MG33AO02 - Rev. 2013-11-07
99

12-4
2Sl
ave
Exce
ptio
n M
essa
ge C
ount
12-5
*Et
herC
AT
12-5
0Co
nfig
ured
Sta
tion
Alia
s12
-51
Conf
igur
ed S
tatio
n A
ddre
ss12
-59
Ethe
rCA
T St
atus
12-6
*Et
hern
et P
ower
Link
12-6
0N
ode
ID12
-62
SDO
Tim
eout
12-6
3Ba
sic
Ethe
rnet
Tim
eout
12-6
6Th
resh
old
12-6
7Th
resh
old
Cou
nter
s12
-68
Cum
ulat
ive
Coun
ters
12-6
9Et
hern
et P
ower
Link
Sta
tus
12-8
*O
ther
Eth
erne
t Se
rvic
es12
-80
FTP
Ser
ver
12-8
1H
TTP
Ser
ver
12-8
2SM
TP S
ervi
ce12
-89
Tran
spar
ent
Sock
et C
hann
el P
ort
12-9
*A
dvan
ced
Eth
erne
t Se
rvic
es12
-90
Cabl
e D
iagn
ostic
12-9
1A
uto
Cro
ss O
ver
12-9
2IG
MP
Sno
opin
g12
-93
Cabl
e Er
ror
Leng
th12
-94
Broa
dcas
t St
orm
Pro
tect
ion
12-9
5Br
oadc
ast
Stor
m F
ilter
12-9
6Po
rt C
onfig
12-9
8In
terf
ace
Coun
ters
12-9
9M
edia
Cou
nter
s13
-**
Smar
t Lo
gic
13-0
*SL
C S
ettin
gs13
-00
SL C
ontr
olle
r M
ode
13-0
1St
art
Even
t13
-02
Stop
Eve
nt13
-03
Rese
t SL
C13
-1*
Com
para
tors
13-1
0Co
mpa
rato
r O
pera
nd13
-11
Com
para
tor
Ope
rato
r13
-12
Com
para
tor
Valu
e13
-1*
RS F
lip F
lops
13-1
5RS
-FF
Ope
rand
S13
-16
RS-F
F O
pera
nd R
13-2
*Ti
mer
s13
-20
SL C
ontr
olle
r Ti
mer
13-4
*Lo
gic
Rule
s13
-40
Logi
c Ru
le B
oole
an 1
13-4
1Lo
gic
Rule
Ope
rato
r 1
13-4
2Lo
gic
Rule
Boo
lean
213
-43
Logi
c Ru
le O
pera
tor
213
-44
Logi
c Ru
le B
oole
an 3
13-5
*St
ates
13-5
1SL
Con
trol
ler
Even
t13
-52
SL C
ontr
olle
r A
ctio
n14
-**
Spec
ial F
unct
ions
14-0
*In
vert
er S
witc
hing
14-0
0Sw
itchi
ng P
atte
rn14
-01
Switc
hing
Fre
quen
cy14
-03
Ove
rmod
ulat
ion
14-0
4PW
M R
ando
m14
-06
Dea
d T
ime
Com
pens
atio
n
14-1
*M
ains
On/
Off
14-1
0M
ains
Fai
lure
14-1
1M
ains
Vol
tage
at
Mai
ns F
ault
14-1
2Fu
nctio
n a
t M
ains
Imba
lanc
e14
-14
Kin.
Bac
kup
Tim
e O
ut14
-15
Kin.
Bac
kup
Trip
Rec
over
y Le
vel
14-2
*Tr
ip R
eset
14-2
0Re
set
Mod
e14
-21
Aut
omat
ic R
esta
rt T
ime
14-2
2O
pera
tion
Mod
e14
-24
Trip
Del
ay a
t Cu
rren
t Li
mit
14-2
5Tr
ip D
elay
at
Torq
ue L
imit
14-2
6Tr
ip D
elay
at
Inve
rter
Fau
lt14
-28
Prod
uctio
n S
ettin
gs14
-29
Serv
ice
Code
14-3
*Cu
rren
t Li
mit
Ctr
l.14
-30
Curr
ent
Lim
Ctr
l, Pr
opor
tiona
l Gai
n14
-31
Curr
ent
Lim
Ctr
l, In
tegr
atio
n T
ime
14-3
2Cu
rren
t Li
m C
trl,
Filte
r Ti
me
14-3
5St
all P
rote
ctio
n14
-36
Fiel
dwea
keni
ng F
unct
ion
14-4
*En
ergy
Opt
imis
ing
14-4
0VT
Lev
el14
-41
AEO
Min
imum
Mag
netis
atio
n14
-42
Min
imum
AEO
Fre
quen
cy14
-43
Mot
or C
osph
i14
-5*
Envi
ronm
ent
14-5
0RF
I Filt
er14
-51
DC
Lin
k Co
mpe
nsat
ion
14-5
2Fa
n C
ontr
ol14
-53
Fan
Mon
itor
14-5
5O
utpu
t Fi
lter
14-5
6Ca
paci
tanc
e O
utpu
t Fi
lter
14-5
7In
duct
ance
Out
put
Filte
r14
-59
Act
ual N
umbe
r of
Inve
rter
Uni
ts14
-7*
Com
patib
ility
14-7
2Le
gacy
Ala
rm W
ord
14-7
3Le
gacy
War
ning
Wor
d14
-74
Leg.
Ext
. Sta
tus
Wor
d14
-8*
Opt
ions
14-8
0O
ptio
n S
uppl
ied
by
Exte
rnal
24V
DC
14-8
9O
ptio
n D
etec
tion
14-9
*Fa
ult
Sett
ings
14-9
0Fa
ult
Leve
l15
-**
Dri
ve In
form
atio
n15
-0*
Ope
ratin
g D
ata
15-0
0O
pera
ting
hou
rs15
-01
Runn
ing
Hou
rs15
-02
kWh
Cou
nter
15-0
3Po
wer
Up'
s15
-04
Ove
r Te
mp'
s15
-05
Ove
r Vo
lt's
15-0
6Re
set
kWh
Cou
nter
15-0
7Re
set
Runn
ing
Hou
rs C
ount
er15
-1*
Dat
a Lo
g S
ettin
gs15
-10
Logg
ing
Sou
rce
15-1
1Lo
ggin
g In
terv
al15
-12
Trig
ger
Even
t15
-13
Logg
ing
Mod
e
15-1
4Sa
mpl
es B
efor
e Tr
igge
r15
-2*
His
tori
c Lo
g15
-20
His
toric
Log
: Eve
nt15
-21
His
toric
Log
: Val
ue15
-22
His
toric
Log
: Tim
e15
-3*
Faul
t Lo
g15
-30
Faul
t Lo
g: E
rror
Cod
e15
-31
Faul
t Lo
g: V
alue
15-3
2Fa
ult
Log:
Tim
e15
-4*
Dri
ve Id
entif
icat
ion
15-4
0FC
Typ
e15
-41
Pow
er S
ectio
n15
-42
Volta
ge15
-43
Soft
war
e Ve
rsio
n15
-44
Ord
ered
Typ
ecod
e St
ring
15-4
5A
ctua
l Typ
ecod
e St
ring
15-4
6Fr
eque
ncy
Conv
erte
r O
rder
ing
No
15-4
7Po
wer
Car
d O
rder
ing
No
15-4
8LC
P Id
No
15-4
9SW
ID C
ontr
ol C
ard
15-5
0SW
ID P
ower
Car
d15
-51
Freq
uenc
y Co
nver
ter
Seria
l Num
ber
15-5
3Po
wer
Car
d S
eria
l Num
ber
15-5
8Sm
art
Setu
p F
ilena
me
15-5
9CS
IV F
ilena
me
15-6
*O
ptio
n Id
ent
15-6
0O
ptio
n M
ount
ed15
-61
Opt
ion
SW
Ver
sion
15-6
2O
ptio
n O
rder
ing
No
15-6
3O
ptio
n S
eria
l No
15-7
0O
ptio
n in
Slo
t A
15-7
1Sl
ot A
Opt
ion
SW
Ver
sion
15-7
2O
ptio
n in
Slo
t B
15-7
3Sl
ot B
Opt
ion
SW
Ver
sion
15-7
4O
ptio
n in
Slo
t C0
/E0
15-7
5Sl
ot C
0/E0
Opt
ion
SW
Ver
sion
15-7
6O
ptio
n in
Slo
t C1
/E1
15-7
7Sl
ot C
1/E1
Opt
ion
SW
Ver
sion
15-8
*O
pera
ting
Dat
a II
15-8
0Fa
n R
unni
ng H
ours
15-8
1Pr
eset
Fan
Run
ning
Hou
rs15
-89
Conf
igur
atio
n C
hang
e Co
unte
r15
-9*
Para
met
er In
fo15
-92
Def
ined
Par
amet
ers
15-9
3M
odifi
ed P
aram
eter
s15
-98
Driv
e Id
entif
icat
ion
15-9
9Pa
ram
eter
Met
adat
a16
-**
Dat
a Re
adou
ts16
-0*
Gen
eral
Sta
tus
16-0
0Co
ntro
l Wor
d16
-01
Refe
renc
e [U
nit]
16-0
2Re
fere
nce
%16
-03
Stat
us W
ord
16-0
5M
ain
Act
ual V
alue
[%]
16-0
9Cu
stom
Rea
dout
16-1
*M
otor
Sta
tus
16-1
0Po
wer
[kW
]16
-11
Pow
er [h
p]16
-12
Mot
or V
olta
ge
16-1
3Fr
eque
ncy
16-1
4M
otor
cur
rent
16-1
5Fr
eque
ncy
[%]
16-1
6To
rque
[Nm
]16
-17
Spee
d [R
PM]
16-1
8M
otor
The
rmal
16-1
9KT
Y s
enso
r te
mpe
ratu
re16
-20
Mot
or A
ngle
16-2
1To
rque
[%]
Hig
h R
es.
16-2
2To
rque
[%]
16-2
3M
otor
Sha
ft P
ower
[kW
]16
-24
Calib
rate
d S
tato
r Re
sist
ance
16-2
5To
rque
[Nm
] H
igh
16-3
*D
rive
Sta
tus
16-3
0D
C L
ink
Volta
ge16
-32
Brak
e En
ergy
/s
16-3
3Br
ake
Ener
gy /
2 m
in16
-34
Hea
tsin
k Te
mp.
16-3
5In
vert
er T
herm
al16
-36
Inv.
Nom
. Cur
rent
16-3
7In
v. M
ax. C
urre
nt16
-38
SL C
ontr
olle
r St
ate
16-3
9Co
ntro
l Car
d T
emp.
16-4
0Lo
ggin
g B
uffe
r Fu
ll16
-41
LCP
Bot
tom
Sta
tusl
ine
16-4
5M
otor
Pha
se U
Cur
rent
16-4
6M
otor
Pha
se V
Cur
rent
16-4
7M
otor
Pha
se W
Cur
rent
16-4
8Sp
eed
Ref
. Aft
er R
amp
[RPM
]16
-49
Curr
ent
Faul
t So
urce
16-5
*Re
f. &
Fee
db.
16-5
0Ex
tern
al R
efer
ence
16-5
1Pu
lse
Refe
renc
e16
-52
Feed
back
[Uni
t]16
-53
Dig
i Pot
Ref
eren
ce16
-57
Feed
back
[RPM
]16
-6*
Inpu
ts &
Out
puts
16-6
0D
igita
l Inp
ut16
-61
Term
inal
53
Switc
h S
ettin
g16
-62
Ana
log
Inpu
t 53
16-6
3Te
rmin
al 5
4 Sw
itch
Set
ting
16-6
4A
nalo
g In
put
5416
-65
Ana
log
Out
put
42 [m
A]
16-6
6D
igita
l Out
put
[bin
]16
-67
Freq
. Inp
ut #
29 [H
z]16
-68
Freq
. Inp
ut #
33 [H
z]16
-69
Puls
e O
utpu
t #2
7 [H
z]16
-70
Puls
e O
utpu
t #2
9 [H
z]16
-71
Rela
y O
utpu
t [b
in]
16-7
2Co
unte
r A
16-7
3Co
unte
r B
16-7
4Pr
ec. S
top
Cou
nter
16-7
5A
nalo
g In
X30
/11
16-7
6A
nalo
g In
X30
/12
16-7
7A
nalo
g O
ut X
30/8
[mA
]16
-78
Ana
log
Out
X45
/1 [m
A]
16-7
9A
nalo
g O
ut X
45/3
[mA
]16
-8*
Fiel
dbus
& F
C P
ort
16-8
0Fi
eldb
us C
TW 1
16-8
2Fi
eldb
us R
EF 1
16-8
4Co
mm
. Opt
ion
STW
16-8
5FC
Por
t CT
W 1
16-8
6FC
Por
t RE
F 1
16-8
7Bu
s Re
adou
t A
larm
/War
ning
16-8
9Co
nfig
urab
le A
larm
/War
ning
Wor
d16
-9*
Dia
gnos
is R
eado
uts
16-9
0A
larm
Wor
d16
-91
Ala
rm W
ord
216
-92
War
ning
Wor
d16
-93
War
ning
Wor
d 2
16-9
4Ex
t. S
tatu
s W
ord
17-*
*Fe
edba
ck O
ptio
n17
-1*
Inc.
Enc
. Int
erfa
ce17
-10
Sign
al T
ype
17-1
1Re
solu
tion
(PPR
)17
-2*
Abs
. Enc
. Int
erfa
ce17
-20
Prot
ocol
Sel
ectio
n17
-21
Reso
lutio
n (P
ositi
ons/
Rev)
17-2
4SS
I Dat
a Le
ngth
17-2
5Cl
ock
Rate
17-2
6SS
I Dat
a Fo
rmat
17-3
4H
IPER
FACE
Bau
drat
e17
-5*
Reso
lver
Inte
rfac
e17
-50
Pole
s17
-51
Inpu
t Vo
ltage
17-5
2In
put
Freq
uenc
y17
-53
Tran
sfor
mat
ion
Rat
io17
-56
Enco
der
Sim
. Res
olut
ion
17-5
9Re
solv
er In
terf
ace
17-6
*M
onito
ring
and
App
.17
-60
Feed
back
Dire
ctio
n17
-61
Feed
back
Sig
nal M
onito
ring
18-*
*D
ata
Read
outs
218
-3*
Ana
log
Rea
dout
s18
-36
Ana
log
Inpu
t X4
8/2
[mA
]18
-37
Tem
p. In
put
X48/
418
-38
Tem
p. In
put
X48/
718
-39
Tem
p. In
put
X48/
1018
-6*
Inpu
ts &
Out
puts
218
-60
Dig
ital I
nput
218
-9*
PID
Rea
dout
s18
-90
Proc
ess
PID
Err
or18
-91
Proc
ess
PID
Out
put
18-9
2Pr
oces
s PI
D C
lam
ped
Out
put
18-9
3Pr
oces
s PI
D G
ain
Sca
led
Out
put
30-*
*Sp
ecia
l Fea
ture
s30
-0*
Wob
bler
30-0
0W
obbl
e M
ode
30-0
1W
obbl
e D
elta
Fre
quen
cy [H
z]30
-02
Wob
ble
Del
ta F
requ
ency
[%]
30-0
3W
obbl
e D
elta
Fre
q. S
calin
g R
esou
rce
30-0
4W
obbl
e Ju
mp
Fre
quen
cy [H
z]30
-05
Wob
ble
Jum
p F
requ
ency
[%]
30-0
6W
obbl
e Ju
mp
Tim
e30
-07
Wob
ble
Sequ
ence
Tim
e30
-08
Wob
ble
Up/
Dow
n T
ime
30-0
9W
obbl
e Ra
ndom
Fun
ctio
n30
-10
Wob
ble
Ratio
Appendix VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 73
9 9
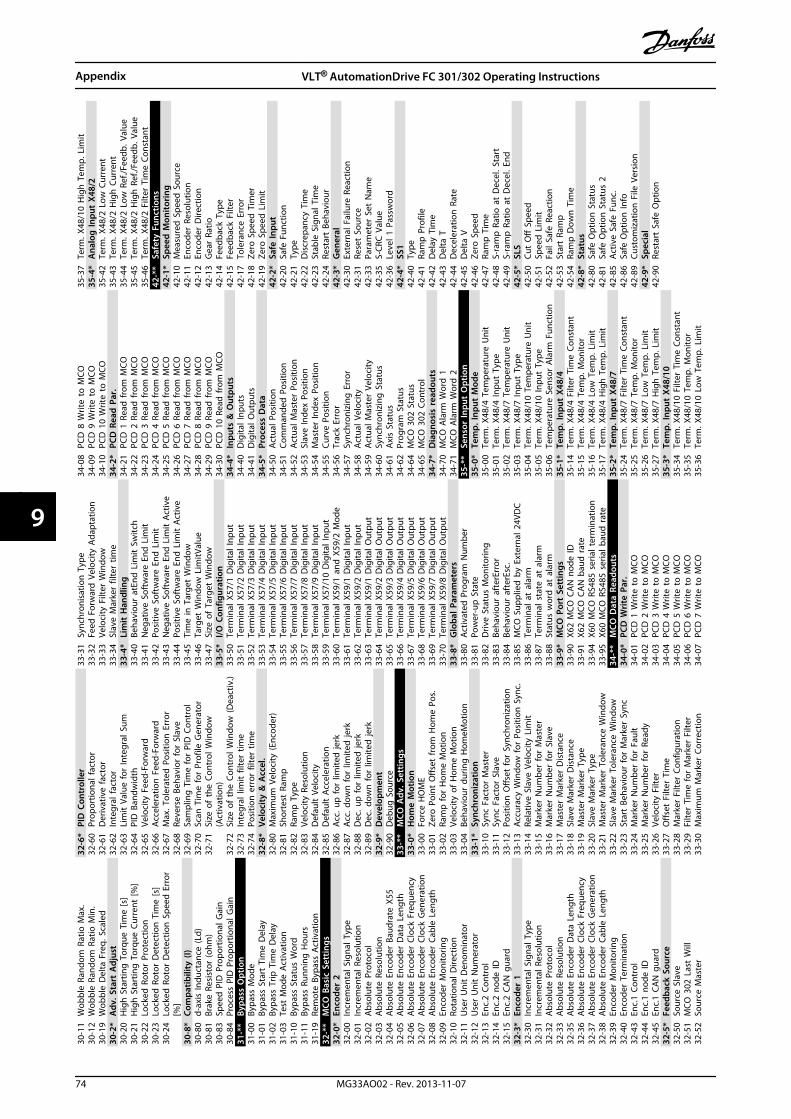
30-1
1W
obbl
e Ra
ndom
Rat
io M
ax.
30-1
2W
obbl
e Ra
ndom
Rat
io M
in.
30-1
9W
obbl
e D
elta
Fre
q. S
cale
d30
-2*
Adv
. Sta
rt A
djus
t30
-20
Hig
h S
tart
ing
Tor
que
Tim
e [s
]30
-21
Hig
h S
tart
ing
Tor
que
Curr
ent
[%]
30-2
2Lo
cked
Rot
or P
rote
ctio
n30
-23
Lock
ed R
otor
Det
ectio
n T
ime
[s]
30-2
4Lo
cked
Rot
or D
etec
tion
Spe
ed E
rror
[%]
30-8
*Co
mpa
tibili
ty (I
)30
-80
d-ax
is In
duct
ance
(Ld)
30-8
1Br
ake
Resi
stor
(ohm
)30
-83
Spee
d P
ID P
ropo
rtio
nal G
ain
30-8
4Pr
oces
s PI
D P
ropo
rtio
nal G
ain
31-*
*By
pass
Opt
ion
31-0
0By
pass
Mod
e31
-01
Bypa
ss S
tart
Tim
e D
elay
31-0
2By
pass
Trip
Tim
e D
elay
31-0
3Te
st M
ode
Act
ivat
ion
31-1
0By
pass
Sta
tus
Wor
d31
-11
Bypa
ss R
unni
ng H
ours
31-1
9Re
mot
e By
pass
Act
ivat
ion
32-*
*M
CO B
asic
Set
tings
32-0
*En
code
r 2
32-0
0In
crem
enta
l Sig
nal T
ype
32-0
1In
crem
enta
l Res
olut
ion
32-0
2A
bsol
ute
Prot
ocol
32-0
3A
bsol
ute
Reso
lutio
n32
-04
Abs
olut
e En
code
r Ba
udra
te X
5532
-05
Abs
olut
e En
code
r D
ata
Leng
th32
-06
Abs
olut
e En
code
r Cl
ock
Freq
uenc
y32
-07
Abs
olut
e En
code
r Cl
ock
Gen
erat
ion
32-0
8A
bsol
ute
Enco
der
Cabl
e Le
ngth
32-0
9En
code
r M
onito
ring
32-1
0Ro
tatio
nal D
irect
ion
32-1
1U
ser
Uni
t D
enom
inat
or32
-12
Use
r U
nit
Num
erat
or32
-13
Enc.
2 Co
ntro
l32
-14
Enc.
2 no
de ID
32-1
5En
c.2
CAN
gua
rd32
-3*
Enco
der
132
-30
Incr
emen
tal S
igna
l Typ
e32
-31
Incr
emen
tal R
esol
utio
n32
-32
Abs
olut
e Pr
otoc
ol32
-33
Abs
olut
e Re
solu
tion
32-3
5A
bsol
ute
Enco
der
Dat
a Le
ngth
32-3
6A
bsol
ute
Enco
der
Cloc
k Fr
eque
ncy
32-3
7A
bsol
ute
Enco
der
Cloc
k G
ener
atio
n32
-38
Abs
olut
e En
code
r Ca
ble
Leng
th32
-39
Enco
der
Mon
itorin
g32
-40
Enco
der
Term
inat
ion
32-4
3En
c.1
Cont
rol
32-4
4En
c.1
node
ID32
-45
Enc.
1 CA
N g
uard
32-5
*Fe
edba
ck S
ourc
e32
-50
Sour
ce S
lave
32-5
1M
CO 3
02 L
ast
Will
32-5
2So
urce
Mas
ter
32-6
*PI
D C
ontr
olle
r32
-60
Prop
ortio
nal f
acto
r32
-61
Der
ivat
ive
fact
or32
-62
Inte
gral
fact
or32
-63
Lim
it V
alue
for
Inte
gral
Sum
32-6
4PI
D B
andw
idth
32-6
5Ve
loci
ty F
eed-
Forw
ard
32-6
6A
ccel
erat
ion
Fee
d-Fo
rwar
d32
-67
Max
. Tol
erat
ed P
ositi
on E
rror
32-6
8Re
vers
e Be
havi
or fo
r Sl
ave
32-6
9Sa
mpl
ing
Tim
e fo
r PI
D C
ontr
ol32
-70
Scan
Tim
e fo
r Pr
ofile
Gen
erat
or32
-71
Size
of
the
Cont
rol W
indo
w(A
ctiv
atio
n)32
-72
Size
of
the
Cont
rol W
indo
w (D
eact
iv.)
32-7
3In
tegr
al li
mit
filte
r tim
e32
-74
Posi
tion
err
or fi
lter
time
32-8
*Ve
loci
ty &
Acc
el.
32-8
0M
axim
um V
eloc
ity (E
ncod
er)
32-8
1Sh
orte
st R
amp
32-8
2Ra
mp
Typ
e32
-83
Velo
city
Res
olut
ion
32-8
4D
efau
lt V
eloc
ity32
-85
Def
ault
Acc
eler
atio
n32
-86
Acc
. up
for
limite
d je
rk32
-87
Acc
. dow
n fo
r lim
ited
jerk
32-8
8D
ec. u
p fo
r lim
ited
jerk
32-8
9D
ec. d
own
for
limite
d je
rk32
-9*
Dev
elop
men
t32
-90
Deb
ug S
ourc
e33
-**
MCO
Adv
. Set
tings
33-0
*H
ome
Mot
ion
33-0
0Fo
rce
HO
ME
33-0
1Ze
ro P
oint
Offs
et fr
om H
ome
Pos.
33-0
2Ra
mp
for
Hom
e M
otio
n33
-03
Velo
city
of
Hom
e M
otio
n33
-04
Beha
viou
r du
ring
Hom
eMot
ion
33-1
*Sy
nchr
oniz
atio
n33
-10
Sync
Fac
tor
Mas
ter
33-1
1Sy
nc F
acto
r Sl
ave
33-1
2Po
sitio
n O
ffset
for
Sync
hron
izat
ion
33-1
3A
ccur
acy
Win
dow
for
Posi
tion
Syn
c.33
-14
Rela
tive
Slav
e Ve
loci
ty L
imit
33-1
5M
arke
r N
umbe
r fo
r M
aste
r33
-16
Mar
ker
Num
ber
for
Slav
e33
-17
Mas
ter
Mar
ker
Dis
tanc
e33
-18
Slav
e M
arke
r D
ista
nce
33-1
9M
aste
r M
arke
r Ty
pe33
-20
Slav
e M
arke
r Ty
pe33
-21
Mas
ter
Mar
ker
Tole
ranc
e W
indo
w33
-22
Slav
e M
arke
r To
lera
nce
Win
dow
33-2
3St
art
Beha
viou
r fo
r M
arke
r Sy
nc33
-24
Mar
ker
Num
ber
for
Faul
t33
-25
Mar
ker
Num
ber
for
Read
y33
-26
Velo
city
Filt
er33
-27
Offs
et F
ilter
Tim
e33
-28
Mar
ker
Filte
r Co
nfig
urat
ion
33-2
9Fi
lter
Tim
e fo
r M
arke
r Fi
lter
33-3
0M
axim
um M
arke
r Co
rrec
tion
33-3
1Sy
nchr
onis
atio
n T
ype
33-3
2Fe
ed F
orw
ard
Vel
ocity
Ada
ptat
ion
33-3
3Ve
loci
ty F
ilter
Win
dow
33-3
4Sl
ave
Mar
ker
filte
r tim
e33
-4*
Lim
it H
andl
ing
33-4
0Be
havi
our
atEn
d L
imit
Sw
itch
33-4
1N
egat
ive
Soft
war
e En
d L
imit
33-4
2Po
sitiv
e So
ftw
are
End
Lim
it33
-43
Neg
ativ
e So
ftw
are
End
Lim
it A
ctiv
e33
-44
Posi
tive
Soft
war
e En
d L
imit
Act
ive
33-4
5Ti
me
in T
arge
t W
indo
w33
-46
Targ
et W
indo
w L
imitV
alue
33-4
7Si
ze o
f Ta
rget
Win
dow
33-5
*I/O
Con
figur
atio
n33
-50
Term
inal
X57
/1 D
igita
l Inp
ut33
-51
Term
inal
X57
/2 D
igita
l Inp
ut33
-52
Term
inal
X57
/3 D
igita
l Inp
ut33
-53
Term
inal
X57
/4 D
igita
l Inp
ut33
-54
Term
inal
X57
/5 D
igita
l Inp
ut33
-55
Term
inal
X57
/6 D
igita
l Inp
ut33
-56
Term
inal
X57
/7 D
igita
l Inp
ut33
-57
Term
inal
X57
/8 D
igita
l Inp
ut33
-58
Term
inal
X57
/9 D
igita
l Inp
ut33
-59
Term
inal
X57
/10
Dig
ital I
nput
33-6
0Te
rmin
al X
59/1
and
X59
/2 M
ode
33-6
1Te
rmin
al X
59/1
Dig
ital I
nput
33-6
2Te
rmin
al X
59/2
Dig
ital I
nput
33-6
3Te
rmin
al X
59/1
Dig
ital O
utpu
t33
-64
Term
inal
X59
/2 D
igita
l Out
put
33-6
5Te
rmin
al X
59/3
Dig
ital O
utpu
t33
-66
Term
inal
X59
/4 D
igita
l Out
put
33-6
7Te
rmin
al X
59/5
Dig
ital O
utpu
t33
-68
Term
inal
X59
/6 D
igita
l Out
put
33-6
9Te
rmin
al X
59/7
Dig
ital O
utpu
t33
-70
Term
inal
X59
/8 D
igita
l Out
put
33-8
*G
loba
l Par
amet
ers
33-8
0A
ctiv
ated
Pro
gram
Num
ber
33-8
1Po
wer
-up
Sta
te33
-82
Driv
e St
atus
Mon
itorin
g33
-83
Beha
viou
r af
terE
rror
33-8
4Be
havi
our
afte
rEsc
.33
-85
MCO
Sup
plie
d b
y Ex
tern
al 2
4VD
C33
-86
Term
inal
at
alar
m33
-87
Term
inal
sta
te a
t al
arm
33-8
8St
atus
wor
d a
t al
arm
33-9
*M
CO P
ort
Sett
ings
33-9
0X6
2 M
CO C
AN
nod
e ID
33-9
1X6
2 M
CO C
AN
bau
d r
ate
33-9
4X6
0 M
CO R
S485
ser
ial t
erm
inat
ion
33-9
5X6
0 M
CO R
S485
ser
ial b
aud
rat
e34
-**
MCO
Dat
a Re
adou
ts34
-0*
PCD
Wri
te P
ar.
34-0
1PC
D 1
Writ
e to
MCO
34-0
2PC
D 2
Writ
e to
MCO
34-0
3PC
D 3
Writ
e to
MCO
34-0
4PC
D 4
Writ
e to
MCO
34-0
5PC
D 5
Writ
e to
MCO
34-0
6PC
D 6
Writ
e to
MCO
34-0
7PC
D 7
Writ
e to
MCO
34-0
8PC
D 8
Writ
e to
MCO
34-0
9PC
D 9
Writ
e to
MCO
34-1
0PC
D 1
0 W
rite
to M
CO34
-2*
PCD
Rea
d P
ar.
34-2
1PC
D 1
Rea
d fr
om M
CO34
-22
PCD
2 R
ead
from
MCO
34-2
3PC
D 3
Rea
d fr
om M
CO34
-24
PCD
4 R
ead
from
MCO
34-2
5PC
D 5
Rea
d fr
om M
CO34
-26
PCD
6 R
ead
from
MCO
34-2
7PC
D 7
Rea
d fr
om M
CO34
-28
PCD
8 R
ead
from
MCO
34-2
9PC
D 9
Rea
d fr
om M
CO34
-30
PCD
10
Read
from
MCO
34-4
*In
puts
& O
utpu
ts34
-40
Dig
ital I
nput
s34
-41
Dig
ital O
utpu
ts34
-5*
Proc
ess
Dat
a34
-50
Act
ual P
ositi
on34
-51
Com
man
ded
Pos
ition
34-5
2A
ctua
l Mas
ter
Posi
tion
34-5
3Sl
ave
Inde
x Po
sitio
n34
-54
Mas
ter
Inde
x Po
sitio
n34
-55
Curv
e Po
sitio
n34
-56
Trac
k Er
ror
34-5
7Sy
nchr
oniz
ing
Err
or34
-58
Act
ual V
eloc
ity34
-59
Act
ual M
aste
r Ve
loci
ty34
-60
Sync
hron
izin
g S
tatu
s34
-61
Axi
s St
atus
34-6
2Pr
ogra
m S
tatu
s34
-64
MCO
302
Sta
tus
34-6
5M
CO 3
02 C
ontr
ol34
-7*
Dia
gnos
is r
eado
uts
34-7
0M
CO A
larm
Wor
d 1
34-7
1M
CO A
larm
Wor
d 2
35-*
*Se
nsor
Inpu
t O
ptio
n35
-0*
Tem
p. In
put
Mod
e35
-00
Term
. X48
/4 T
empe
ratu
re U
nit
35-0
1Te
rm. X
48/4
Inpu
t Ty
pe35
-02
Term
. X48
/7 T
empe
ratu
re U
nit
35-0
3Te
rm. X
48/7
Inpu
t Ty
pe35
-04
Term
. X48
/10
Tem
pera
ture
Uni
t35
-05
Term
. X48
/10
Inpu
t Ty
pe35
-06
Tem
pera
ture
Sen
sor
Ala
rm F
unct
ion
35-1
*Te
mp.
Inpu
t X4
8/4
35-1
4Te
rm. X
48/4
Filt
er T
ime
Cons
tant
35-1
5Te
rm. X
48/4
Tem
p. M
onito
r35
-16
Term
. X48
/4 L
ow T
emp.
Lim
it35
-17
Term
. X48
/4 H
igh
Tem
p. L
imit
35-2
*Te
mp.
Inpu
t X4
8/7
35-2
4Te
rm. X
48/7
Filt
er T
ime
Cons
tant
35-2
5Te
rm. X
48/7
Tem
p. M
onito
r35
-26
Term
. X48
/7 L
ow T
emp.
Lim
it35
-27
Term
. X48
/7 H
igh
Tem
p. L
imit
35-3
*Te
mp.
Inpu
t X4
8/10
35-3
4Te
rm. X
48/1
0 Fi
lter
Tim
e Co
nsta
nt35
-35
Term
. X48
/10
Tem
p. M
onito
r35
-36
Term
. X48
/10
Low
Tem
p. L
imit
35-3
7Te
rm. X
48/1
0 H
igh
Tem
p. L
imit
35-4
*A
nalo
g In
put
X48/
235
-42
Term
. X48
/2 L
ow C
urre
nt35
-43
Term
. X48
/2 H
igh
Cur
rent
35-4
4Te
rm. X
48/2
Low
Ref
./Fee
db. V
alue
35-4
5Te
rm. X
48/2
Hig
h R
ef./F
eedb
. Val
ue35
-46
Term
. X48
/2 F
ilter
Tim
e Co
nsta
nt42
-**
Safe
ty F
unct
ions
42-1
*Sp
eed
Mon
itori
ng42
-10
Mea
sure
d S
peed
Sou
rce
42-1
1En
code
r Re
solu
tion
42-1
2En
code
r D
irect
ion
42-1
3G
ear
Ratio
42-1
4Fe
edba
ck T
ype
42-1
5Fe
edba
ck F
ilter
42-1
7To
lera
nce
Erro
r42
-18
Zero
Spe
ed T
imer
42-1
9Ze
ro S
peed
Lim
it42
-2*
Safe
Inpu
t42
-20
Safe
Fun
ctio
n42
-21
Type
42-2
2D
iscr
epan
cy T
ime
42-2
3St
able
Sig
nal T
ime
42-2
4Re
star
t Be
havi
our
42-3
*G
ener
al42
-30
Exte
rnal
Fai
lure
Rea
ctio
n42
-31
Rese
t So
urce
42-3
3Pa
ram
eter
Set
Nam
e42
-35
S-CR
C V
alue
42-3
6Le
vel 1
Pas
swor
d42
-4*
SS1
42-4
0Ty
pe42
-41
Ram
p P
rofil
e42
-42
Del
ay T
ime
42-4
3D
elta
T42
-44
Dec
eler
atio
n R
ate
42-4
5D
elta
V42
-46
Zero
Spe
ed42
-47
Ram
p T
ime
42-4
8S-
ram
p R
atio
at
Dec
el. S
tart
42-4
9S-
ram
p R
atio
at
Dec
el. E
nd42
-5*
SLS
42-5
0Cu
t O
ff S
peed
42-5
1Sp
eed
Lim
it42
-52
Fail
Safe
Rea
ctio
n42
-53
Star
t Ra
mp
42-5
4Ra
mp
Dow
n T
ime
42-8
*St
atus
42-8
0Sa
fe O
ptio
n S
tatu
s42
-81
Safe
Opt
ion
Sta
tus
242
-85
Act
ive
Safe
Fun
c.42
-86
Safe
Opt
ion
Info
42-8
9Cu
stom
izat
ion
File
Ver
sion
42-9
*Sp
ecia
l42
-90
Rest
art
Safe
Opt
ion
Appendix VLT® AutomationDrive FC 301/302 Operating Instructions
74 MG33AO02 - Rev. 2013-11-07
99

Index
AAbbreviations....................................................................................... 70
ACinput................................................................................................. 6, 15mains................................................................................................ 6, 15waveform.............................................................................................. 6
Additional Resources........................................................................... 3
Alarm Log............................................................................................... 22
Alarms...................................................................................................... 37
AMAAMA................................................................................. 26, 35, 39, 42with T27 Connected........................................................................ 29without T27 Connected................................................................. 29
Ambient Conditions........................................................................... 58
Analoginput.............................................................................................. 16, 38Inputs................................................................................................... 59output.................................................................................................. 16Output.................................................................................................. 60signal.................................................................................................... 38speed reference................................................................................ 29
Approvals.................................................................................................. 6
Auto On.............................................................................. 23, 28, 35, 37
Auto-reset............................................................................................... 22
Auxiliary equipment.......................................................................... 20
BBack plate............................................................................................... 10
Brakecontrol.................................................................................................. 39resistor................................................................................................. 38
Braking.............................................................................................. 40, 35
CCable
Lengths and Cross Sections......................................................... 58routing................................................................................................. 20Specifications.................................................................................... 58
Certifications........................................................................................... 6
Circuit breakers............................................................................. 20, 62
Clearance requirements..................................................................... 9
Closed loop............................................................................................ 18
Communication option.................................................................... 41
Conduit.................................................................................................... 20
Controlcard......................................................................................... 38, 60, 61characteristics.................................................................................... 61signal.................................................................................................... 35terminals........................................................................ 25, 35, 37, 23wiring.............................................................................. 11, 13, 17, 20
Conventions.......................................................................................... 70
CoolingCooling................................................................................................... 9clearance............................................................................................. 20
Currentlimit....................................................................................................... 46rating.................................................................................................... 39
DDC current................................................................................... 6, 11, 36
DC-link..................................................................................................... 38
Default settings.................................................................................... 24
Digitalinput....................................................................................... 37, 39, 17Inputs................................................................................................... 58Output.................................................................................................. 60
Dimensions............................................................................................ 69
Discharge time........................................................................................ 7
Disconnect switch............................................................................... 21
Disposal Instruction.............................................................................. 6
EElectrical
Installation.......................................................................................... 11interference........................................................................................ 11
EMCEMC....................................................................................................... 11interference........................................................................................ 13
Encoder Rotation................................................................................. 27
Environment.......................................................................................... 58
Exploded View........................................................................................ 5
Externalalarm reset.......................................................................................... 32commands..................................................................................... 6, 37controllers............................................................................................. 3interlock............................................................................................... 17
FFault log.................................................................................................. 22
FC............................................................................................................... 19
Feedback............................................................................ 18, 20, 41, 36
Floating delta........................................................................................ 15
FLUX.......................................................................................................... 34
Front cover tightening torque...................................................... 69
Fuses.................................................................................... 11, 20, 41, 62
GGround
connections....................................................................................... 20wire........................................................................................................ 11
Grounded delta.................................................................................... 15
Index VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 75
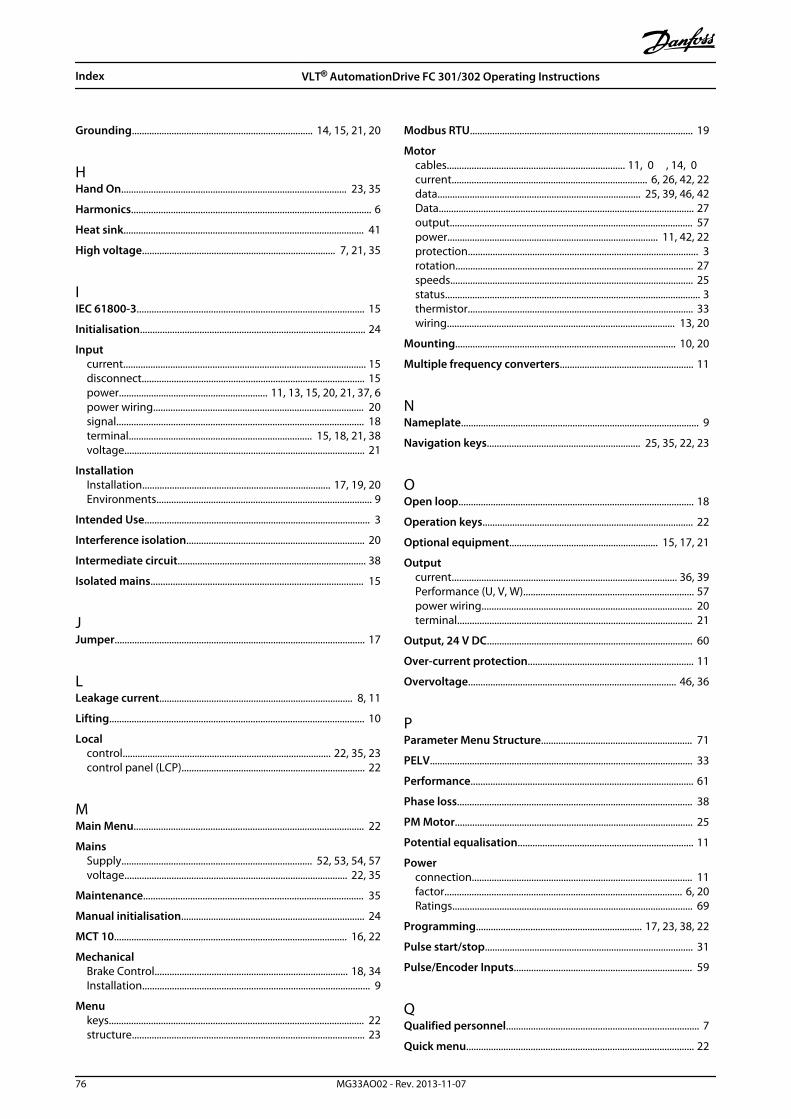
Grounding......................................................................... 14, 15, 21, 20
HHand On........................................................................................... 23, 35
Harmonics................................................................................................. 6
Heat sink................................................................................................. 41
High voltage.............................................................................. 7, 21, 35
IIEC 61800-3............................................................................................ 15
Initialisation........................................................................................... 24
Inputcurrent.................................................................................................. 15disconnect.......................................................................................... 15power............................................................ 11, 13, 15, 20, 21, 37, 6power wiring..................................................................................... 20signal.................................................................................................... 18terminal.......................................................................... 15, 18, 21, 38voltage................................................................................................. 21
InstallationInstallation............................................................................ 17, 19, 20Environments....................................................................................... 9
Intended Use........................................................................................... 3
Interference isolation........................................................................ 20
Intermediate circuit............................................................................ 38
Isolated mains...................................................................................... 15
JJumper..................................................................................................... 17
LLeakage current.............................................................................. 8, 11
Lifting....................................................................................................... 10
Localcontrol.................................................................................... 22, 35, 23control panel (LCP).......................................................................... 22
MMain Menu............................................................................................. 22
MainsSupply............................................................................. 52, 53, 54, 57voltage.......................................................................................... 22, 35
Maintenance......................................................................................... 35
Manual initialisation.......................................................................... 24
MCT 10.............................................................................................. 16, 22
MechanicalBrake Control.............................................................................. 18, 34Installation............................................................................................ 9
Menukeys....................................................................................................... 22structure.............................................................................................. 23
Modbus RTU.......................................................................................... 19
Motorcables........................................................................ 11, 0 , 14, 0current............................................................................... 6, 26, 42, 22data.................................................................................. 25, 39, 46, 42Data....................................................................................................... 27output.................................................................................................. 57power..................................................................................... 11, 42, 22protection............................................................................................. 3rotation................................................................................................ 27speeds.................................................................................................. 25status....................................................................................................... 3thermistor........................................................................................... 33wiring............................................................................................ 13, 20
Mounting......................................................................................... 10, 20
Multiple frequency converters...................................................... 11
NNameplate................................................................................................ 9
Navigation keys.............................................................. 25, 35, 22, 23
OOpen loop............................................................................................... 18
Operation keys..................................................................................... 22
Optional equipment............................................................ 15, 17, 21
Outputcurrent........................................................................................... 36, 39Performance (U, V, W)..................................................................... 57power wiring..................................................................................... 20terminal............................................................................................... 21
Output, 24 V DC................................................................................... 60
Over-current protection................................................................... 11
Overvoltage.................................................................................... 46, 36
PParameter Menu Structure............................................................. 71
PELV.......................................................................................................... 33
Performance.......................................................................................... 61
Phase loss............................................................................................... 38
PM Motor................................................................................................ 25
Potential equalisation....................................................................... 11
Powerconnection......................................................................................... 11factor................................................................................................ 6, 20Ratings................................................................................................. 69
Programming................................................................... 17, 23, 38, 22
Pulse start/stop.................................................................................... 31
Pulse/Encoder Inputs........................................................................ 59
QQualified personnel.............................................................................. 7
Quick menu............................................................................................ 22
Index VLT® AutomationDrive FC 301/302 Operating Instructions
76 MG33AO02 - Rev. 2013-11-07

RRamp-down time................................................................................. 46
Ramp-up time....................................................................................... 46
Reference........................................................................... 29, 35, 36, 22
Relay Outputs....................................................................................... 61
Remotecommands............................................................................................ 3reference............................................................................................. 36
Reset........................................................ 22, 37, 39, 43, 44, 22, 23, 24
RFI filter................................................................................................... 15
RMS current.............................................................................................. 6
RS-485network connection........................................................................ 32serial communication.............................................................. 19, 60
Runcommand............................................................................................ 28permissive........................................................................................... 36
SSafe Torque Off.................................................................................... 18
Screened cable.............................................................................. 13, 20
Serial communication.................................... 16, 35, 36, 37, 23, 60
Service...................................................................................................... 35
Setpoint................................................................................................... 37
Set-up................................................................................................ 28, 22
Shock........................................................................................................... 9
Short circuit........................................................................................... 40
SLC............................................................................................................. 33
Sleep Mode............................................................................................ 37
Specifications........................................................................................ 19
Speed reference.............................................................. 18, 28, 29, 35
Start up.................................................................................................... 24
Start/stop command.......................................................................... 31
Status mode........................................................................................... 35
Storage....................................................................................................... 9
Supply voltage................................................................ 15, 16, 21, 41
Switch....................................................................................................... 18
Switching frequency.......................................................................... 36
Symbols................................................................................................... 70
System feedback.................................................................................... 3
TTerminal
53........................................................................................................... 1854.................................................................................................... 18, 44
Thermal Protection............................................................................... 6
ThermistorThermistor................................................................................... 15, 33control wiring.................................................................................... 15
Tighteningcovers................................................................................................... 14Terminals............................................................................................. 68
TorqueTorque.................................................................................................. 39Characteristics................................................................................... 57limit....................................................................................................... 46
Transient protection............................................................................. 6
TripTrip........................................................................................................ 37lock........................................................................................................ 37
Troubleshooting.................................................................................. 45
UUnintended start............................................................................. 7, 21
USB serial communication.............................................................. 61
VVibration.................................................................................................... 9
Voltageimbalance........................................................................................... 38level....................................................................................................... 58
VVCplus................................................................................................... 25
WWarnings................................................................................................. 37
Weight...................................................................................................... 69
Windmilling.............................................................................................. 8
Wire sizes......................................................................................... 11, 14
Wiring Schematic................................................................................ 12
Index VLT® AutomationDrive FC 301/302 Operating Instructions
MG33AO02 - Rev. 2013-11-07 77

www.danfoss.com/drives
Danfoss Power Electronics A/S
Ulsnaes 1
6300 Graasten
Denmark
www.danfoss.com
*MG33AO02*130R0300 MG33AO02 Rev. 2013-11-07


















