
Vida Vegetal
9
DEPARTAMENTO DE CIENCIAS EXACTAS CARRERA DE: Mecatrónica ASIGNATURA: Física II INFORME LABORATORIO No. 1.1 Tema de la práctica: OSCILACIONES LIBRES Realizado por: Esteban Serrano y Edwin Jimenez Curso y NRC: C302 - 1743 Fecha de entrega: Lunes, 14 de Abril del 2014 Abstract Oscilations and the movement they produce makes for a pretty interesting physical behaviour that not only let us se the perfect armonic and cyclic nature of the world but also let us creat incredible devices that work with those very same principles. We have built clocks, pendulums and dampers. In this laboratory prac- tice we analized the many diferences and caracteristicas that simple and damping oscilations have. We also saw how Polh’s pendulum work and its use in the real world. Resumen Las oscilaciones son un fenómeno físico muy interesante que nos permite ver el comportamiento armónico y cíclico que la naturaleza y el mundo físico posee. No solo nos permiten ver el comportamiento, sino, que también nos permiten usar de ellos para crear mecanismos ingeniosos: relojes, péndulos y amortigua- dores son solo pequeñas muestras del poder que tiene el movimiento oscilatorio. En esta practica analizamos las diferencias y características que existen entre dos tipos de movimientos oscilatorios: el movimiento oscilatorio simple y el movi- miento oscilatorio amortiguado. 1
description
Campo de las ciencias de la biologia
Transcript of Vida Vegetal
DEPARTAMENTO DE CIENCIAS EXACTASCARRERA DE: Mecatrónica
ASIGNATURA: Física II
INFORMELABORATORIO No. 1.1
Tema de la práctica: OSCILACIONES LIBRESRealizado por: Esteban Serrano y Edwin JimenezCurso y NRC: C302 - 1743Fecha de entrega: Lunes, 14 de Abril del 2014
Abstract
Oscilations and the movement they produce makes for a pretty interestingphysical behaviour that not only let us se the perfect armonic and cyclic natureof the world but also let us creat incredible devices that work with those very sameprinciples. We have built clocks, pendulums and dampers. In this laboratory prac-tice we analized the many diferences and caracteristicas that simple and dampingoscilations have. We also saw how Polh’s pendulum work and its use in the realworld.
Resumen
Las oscilaciones son un fenómeno físico muy interesante que nos permite verel comportamiento armónico y cíclico que la naturaleza y el mundo físico posee.No solo nos permiten ver el comportamiento, sino, que también nos permitenusar de ellos para crear mecanismos ingeniosos: relojes, péndulos y amortigua-dores son solo pequeñas muestras del poder que tiene el movimiento oscilatorio.En esta practica analizamos las diferencias y características que existen entre dostipos de movimientos oscilatorios: el movimiento oscilatorio simple y el movi-miento oscilatorio amortiguado.
1

1 Objetivos
• Analizar el estudio experimental de las oscilaciones libres con y sin amortigua-miento de un péndulo de torsión.
• Analizar como determinar la constante de amortiguamiento.
• Medir la constante de amortiguamiento.
2 Marco Teórico
Componentes del movimineto:
Antes de definir los componentes del movimiento fuera ideal definir para este do-cumento lo que es considerado como movimiento. El movimiento .Es el cambio de po-sición que experimenta un cuerpo respecto a un sistema de referencia al transcurrir eltiempo."
Basados en esa definición podemos observar de manera clara los diferentes com-ponentes que posee el movimiento y los cuales son: posición(inicial y final), trayecto-ria, espacio, vector desplazamiento, distancia, móvil, velocidad, rapidez y aceleración.
Posición: son la localización que poseé cualquier cuerpo en un eje de referenciascualquiera. Generalmente la posición es representada por coordenadas en el plano. Laposición inicial denota el punto de inicio del movimiento y la poscición final denota elpunto donde termina el movimiento.Su dimensión es [L].En el sistema internacional esta dada por los metros(m) y representado mediante:
x~i+ y~j+ z~k [m]
Trayectoria: es el camino(la línea) que representa todo el movimiento de la partí-cula desde su posición inicial hasta su posición final o hasta donde termine el movi-miento.Su dimensión es [L].En el sistema internacional esta dada por los metros(m) y representado mediante:
~r(t ) = x(t )~i+ y(t )~j+ z(t )~k [m]
2

Espacio: recorrido o distancia recorrida es la distancia que existe entre el puntoinicial y el punto final del movimiento, no necesariamente es el mismo valor de la tra-yectoria.Su dimensión es [L].En el sistema internacional esta dada por los metros(m) y es un valor escalar.
e = x [m]
Vector desplazamiento: es aquel vector que define la posición de un objeto conrespecto a un origen y a una posición.Su dimensión es [L].En el sistema internacional esta dada por los metros(m) y esta definida por:
∆r(t ) =∫ t f
t0
v(t )dt [m]
Distancia: es el valor o medida de la linea recta que conecta 2 puntos.Su dimensión es [L].En el sistema internacional esta dada por los metros(m) y es un valor escalar.
d =√
(x2 −x1)2 + (y2 − y1
)2
3
La linea verde representa la distancia.//Móvil: es el cuerpo o partícula que realiza el movimiento estudiado.
Si posee masa el móvil su dimensión es [M ].En el sistema internacional se lo mide con el kilogramo [kg].
Velocidad: es aquella magnitud vectorial capaz de medir el cambio de posición quesufre un cuerpo o partícula con respecto a una unidad de tiempo. También indica la di-rección y el sentido el cual posee el cuerpo o partícula.Si posee masa el móvil su dimensión es [LT −1].
En el sistema internacional se lo mide con[m
s
]. y se representa:
v(t ) = d
d t[r (t )]
[m
s
]
4

Rapidez: es la relación entre la distancia recorrida con el tiempo que tomo reco-rrerla, es decir que solo representa una magnitud escalar (no hay dirección ni sentido).
v = s
t
[m
s
]Aceleración: es una magnitud vectorial que representa el cambio de la velocidad
por unidad de tiempo.
a = d
d t[v(t )] = d 2
d t 2[s(t )] o
F
m
[m
s2
]3 Materiales y Equipos
• Péndulo de la torsión de Pohl.
• Fuente de alimentación.
• Puente rectificador.
• Cronometro digital.
• Conductores eléctricos.
• Cobra 3 unidad básica.
5
• Fuente de alimentacion 12v.
• Software de traslación-rotación.
• Sensor de movimiento.
• Hilo de seda.
• Porta pesas.
• Material de soporte.
4 Procedimiento
4.1 Oscilaciones libres sin amortiguamiento
1. Una a través de un hilo, el indicador del péndulo de Pohl a un peso de 1 gr, pa-sando por la polea del sensor de movimiento, el mismo que esta conectado a lainterface Cobra 3, la cual esta enlazada a la computadora.
2. Encere el péndulo de Pohl, para lo cual, moviendo la excéntrica que esta junto almotor, consiga que el indicador se ubique en la posición de cero (0).
3. Identifique el software Measure en la computadora, defina "traslación - rotación.escojaregistrar movimiento 2luego rotación» "medida (punto rojo)» çontinuar".
4. Desplace el péndulo hasta la posición de 15 y soltarlo. A su vez, en el menú dela computadora colocar ïniciar medida". Comprobar que el hilo no se salga de laranura periférica del disco de cobre.
5. Después de 8 - 10 oscilaciones, finalizar mediante "parar medición".
6. Seleccione una porción del gráfico sinusoidal donde se exhibía regularmente lasoscilaciones (al menos tres de igual amplitud) mediante los comandos corres-pondientes. Marque en el cuadro de dialogo "suavizar» .análisis de curvas» çal-cular» "mostrar resultados 2anote los mismos, correspondientes al sector selec-cionado por usted. Escoja " f "(transformada de Fourier) y anote la frecuencia deeste péndulo.
4.2 Oscilaciones libres con amortiguamiento
1. Conecte la salida C.A. de la fuente de alimentacion a la bobina del péndulo dePohl, pasando previamente por el puente rectificador y el amperimetro en serie,para generar el amortiguamiento (posiciones 4 - 6).
2. Repita todo el procedimiento que utilizó para las oscilaciones sin amortigua-miento, considerando que en este caso irán paulatinamente disminuyendo deamplitud. Utilice todo el gráfico obtenido excepto lo inicial.
6
3. Registre los datos en las unidades que dan los instrumentos con las apreciacio-nes del instrumento en la hoja técnica de datos.
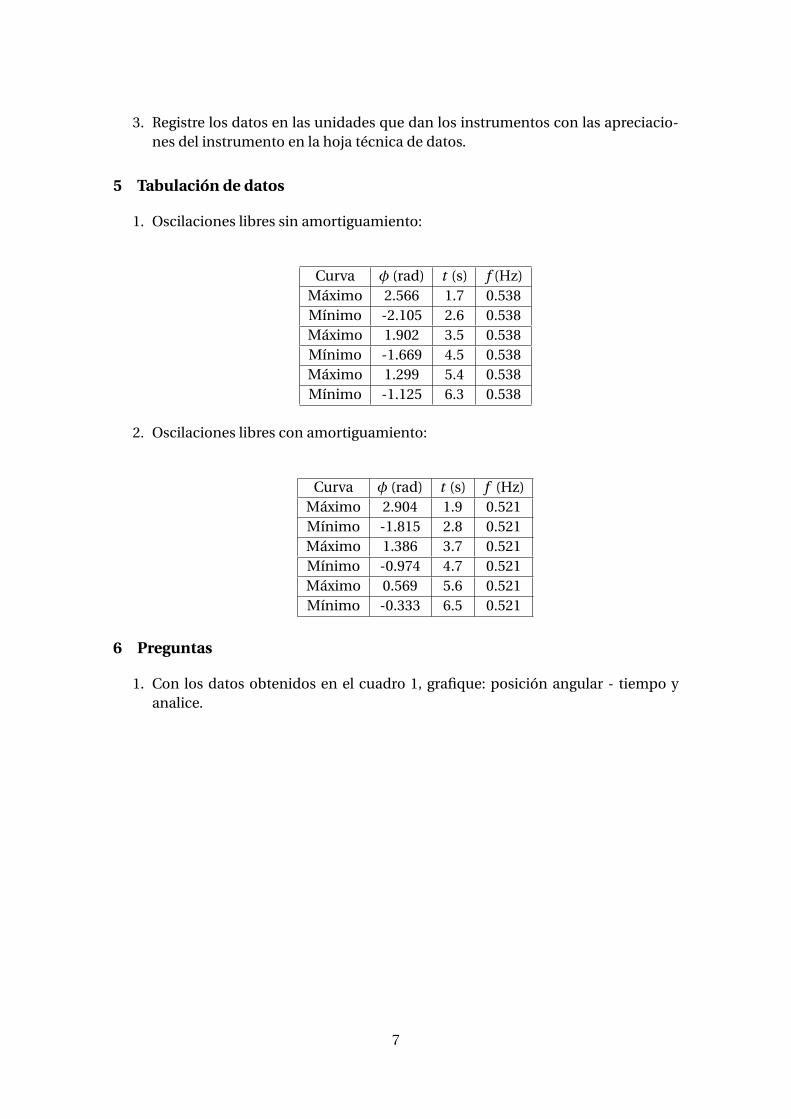
5 Tabulación de datos
1. Oscilaciones libres sin amortiguamiento:
Curva φ (rad) t (s) f (Hz)Máximo 2.566 1.7 0.538Mínimo -2.105 2.6 0.538Máximo 1.902 3.5 0.538Mínimo -1.669 4.5 0.538Máximo 1.299 5.4 0.538Mínimo -1.125 6.3 0.538
2. Oscilaciones libres con amortiguamiento:
Curva φ (rad) t (s) f (Hz)Máximo 2.904 1.9 0.521Mínimo -1.815 2.8 0.521Máximo 1.386 3.7 0.521Mínimo -0.974 4.7 0.521Máximo 0.569 5.6 0.521Mínimo -0.333 6.5 0.521
6 Preguntas
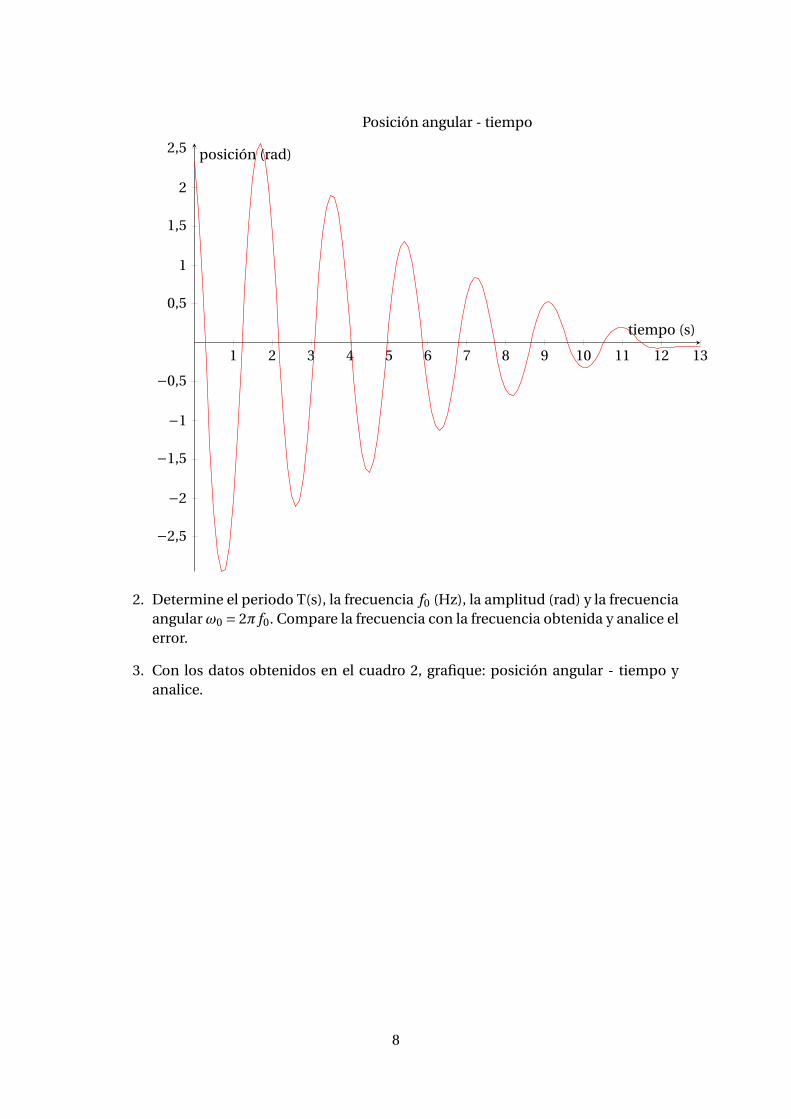
1. Con los datos obtenidos en el cuadro 1, grafique: posición angular - tiempo yanalice.
7
1 2 3 4 5 6 7 8 9 10 11 12 13
−2,5
−2
−1,5
−1
−0,5
0,5
1
1,5
2
2,5
tiempo (s)
posición (rad)
Posición angular - tiempo
2. Determine el periodo T(s), la frecuencia f0 (Hz), la amplitud (rad) y la frecuenciaangularω0 = 2π f0. Compare la frecuencia con la frecuencia obtenida y analice elerror.
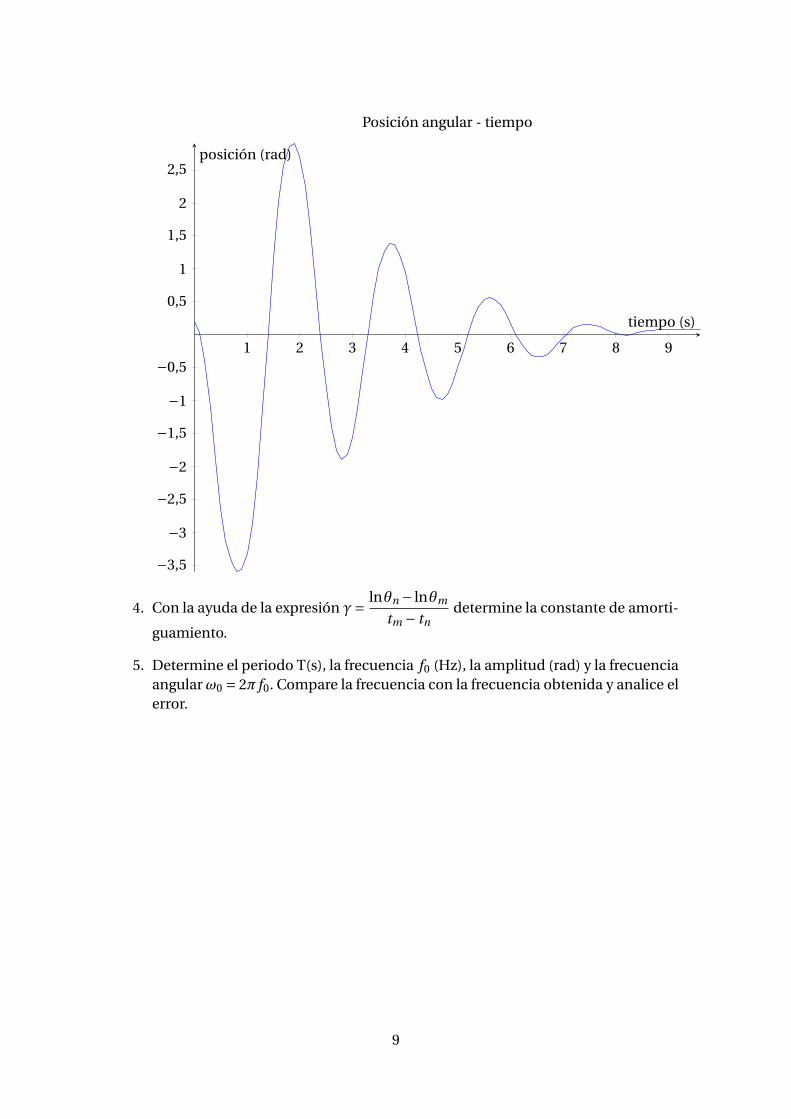
3. Con los datos obtenidos en el cuadro 2, grafique: posición angular - tiempo yanalice.
8
1 2 3 4 5 6 7 8 9
−3,5
−3
−2,5
−2
−1,5
−1
−0,5
0,5
1
1,5
2
2,5
tiempo (s)
posición (rad)
Posición angular - tiempo
4. Con la ayuda de la expresión γ= lnθn − lnθm
tm − tndetermine la constante de amorti-
guamiento.
5. Determine el periodo T(s), la frecuencia f0 (Hz), la amplitud (rad) y la frecuenciaangularω0 = 2π f0. Compare la frecuencia con la frecuencia obtenida y analice elerror.
9


















