
Traitement Sig
63
TH ´ EORIE ET TRAITEMENT DU SIGNAL (selon source : B. PERROT)
description
TH´EORIEETTRAITEMENT DU SIGNAL
Transcript of Traitement Sig

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 1/63
THEORIEET
TRAITEMENT DU SIGNAL
(selon source : B. PERROT)
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 2/63
Table des matieres
I METHODES DETERMINISTES EN TRAITEMENT DUSIGNAL 6
1 Introduction 7
1.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Justification du choix numerique . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Fenetre d’analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Spectre d’un signal analogique . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5 Interpretation heuristique du spectre . . . . . . . . . . . . . . . . . . . . 8
1.6 Signaux analogiques d’energie finie. Densite spectrale d’energie . . . . . . 8
2 Echantillonnage des signaux analogiques 10
2.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Unites normalisees . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Spectre d’un signal echantillonne . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Interpretation heuristique du spectre . . . . . . . . . . . . . . . . . . . . 11
2.5 Signaux discrets d’energie finie. Densite spectrale d’energie . . . . . . . . 12
2.6 Forme deterministe et discrete du theoreme de Wiener-Kinchine . . . . . 12
2.7 Theoreme d’echantillonnage . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.8 Quelques exemples concrets . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Transformee en z 15
3.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Proprietes elementaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Inversion de la transformee en z . . . . . . . . . . . . . . . . . . . . . . . 17
3.4 Inversion de la transformee en z dans le cas d’une fraction rationnelle . . 17
2

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 3/63
4 Apodisation. Pouvoir separateur de l’analyse frequentielle. Analysetemps-frequence 19
4.1 Effet frequentiel d’une restriction de support . . . . . . . . . . . . . . . . 19
4.2 Apodisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.3 Pouvoir separateur de l’analyse frequentielle . . . . . . . . . . . . . . . . 21
4.4 Analyse frequence-temps . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5 Introduction au filtrage LIT 23
5.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.2 Action d’un filtre du point de vue spectral . . . . . . . . . . . . . . . . . 24
5.3 Un critere de stabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255.4 Gabarit d’un filtre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.5 Cascade de filtres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6 Synthese de filtres RIF 28
6.1 Filtre RIF a phase lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . 28
6.2 Synthese par developpement en serie de Fourier . . . . . . . . . . . . . . 28
6.3 Synthese d’un filtre causal a phase lineaire . . . . . . . . . . . . . . . . . 296.4 Synthese d’un filtre causal, a phase lineaire et passe-bas par utilisation
des moindres carres discrets . . . . . . . . . . . . . . . . . . . . . . . . . 29
6.5 Synthese d’un filtre causal, a phase lineaire et passe-bas par utilisationde l’algorithme de Remes . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
7 Filtres recursifs 32
7.1 Definition generale d’un filtre recursif . . . . . . . . . . . . . . . . . . . . 32
7.2 Rappels sur la fonction homographique complexe . . . . . . . . . . . . . 34
7.3 Synthese de filtres recursifs par fonctions modeles . . . . . . . . . . . . . 34
7.3.1 Filtre de Butterworth . . . . . . . . . . . . . . . . . . . . . . . . . 34
7.3.2 Filtres de Tchebitchev . . . . . . . . . . . . . . . . . . . . . . . . 37
7.3.3 Filtres elliptiques (Cauer) . . . . . . . . . . . . . . . . . . . . . . 38
3
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 4/63
II METHODES STATISTIQUES EN TRAITEMENT DUSIGNAL 39
8 Processus aleatoires discrets 40
8.1 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
8.2 Processus aleatoire discret stationnaire . . . . . . . . . . . . . . . . . . . 41
8.3 Processus aleatoire discret stationnaire ergodique . . . . . . . . . . . . . 42
8.4 Densite spectrale de puissance (DSP) . . . . . . . . . . . . . . . . . . . . 43
8.5 Une application du theoreme de Wiener-Kinchine : methode de Wigner-Ville . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
8.6 Puissance d’un processus aleatoire discret stationnaire . . . . . . . . . . . 45
9 Bruit blanc : modelisation AR 469.1 Generalites sur le bruit blanc . . . . . . . . . . . . . . . . . . . . . . . . 46
9.2 Modelisation AR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
10 Couple stationnaire. Intercorrelation 49
10.1 Couple de processus aleatoires discrets stationnaire . . . . . . . . . . . . 49
10.2 Couple aleatoire discret stationnaire ergodique . . . . . . . . . . . . . . . 50
10.3 Intercorrelateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
10.4 Application a la localisation d’une source de bruit . . . . . . . . . . . . . 52
11 Introduction au filtrage LIT des processus aleatoires 53
11.1 Generalites sur le filtrage LIT des processus aleatoires . . . . . . . . . . . 53
11.2 Methode haute resolution utilisant la modelisation AR . . . . . . . . . . 55
12 Filtrage optimal 56
12.1 Filtre adapte a la detection d’un signal de forme connue noye dans unbruit blanc additif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
12.2 Filtre adapte a la detection d’un signal de forme connue noye dans unbruit colore additif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
12.2.1 Construction du filtre blanchisseur . . . . . . . . . . . . . . . . . 58
12.2.2 Construction du second filtre . . . . . . . . . . . . . . . . . . . . 58
12.3 Estimation lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
12.4 Filtre general de Wiener . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 5/63
12.5 Filtre predicteur de Wiener . . . . . . . . . . . . . . . . . . . . . . . . . 61
12.6 Filtre debruiteur de Wiener . . . . . . . . . . . . . . . . . . . . . . . . . 62
5

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 6/63
Premiere partie
METHODES DETERMINISTESEN TRAITEMENT DU SIGNAL
6
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 7/63
Chapitre 1
Introduction
1.1 Generalites
Un signal est la variation d’une grandeur physique (pression, vibration de molecules,position d’une particule, temperature, couleur, . . .). En general, ceci est traduit avecun capteur par la variation analogue d’une grandeur electrique, d’ou le nom de signalanalogique. Souvent ce signal est echantillonne et donne un signal numerique. On parleaussi de signal discret , de signal digital .
Ce signal discret subit une suite de transformations a l’aide d’algorithmes puis estreconvertit en signal analogique.
Ce cours a pour but d’etudier les algorithmes qui interviennent au cours de ce trai-
tement.
Exemple signal de parole.
1.2 Justification du choix numerique
Pour la filiere info.
1.3 Fenetre d’analyse
Un signal physique a un support fini. Souvent, on est conduit a restreindre ce support.
On appelle fenetre d’analyse ce support restreint (naturellement, toutes les integrales,sommations, . . .concernant les signaux se font sur la fenetre d’analyse, sans que cela soitdorenavant precise). Seuls les signaux modeles, abstraits, peuvent avoir un support infini.
7
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 8/63
Exemple s(t) = cos (2 · π · f 0 · t) pour t parametre reel.
1.4 Spectre d’un signal analogique
s etant un signal analogique, par definition son spectre (note S ou F s) est la Trans- formee de Fourier de s :
S (t) = F s(t) =
s(t) · e−2itf dt
Il n’y a pas de probleme de convergence pour les signaux physiques qui sont a supportfini, mais pour certains signaux modeles abstraits (par exemple s(t) = cos (2 · π · f 0 · t)pour tout t reel).
Il faut considerer s comme une Distribution temperee et la Transformee de
Fourier se fait au sens des contributions (vu dans la partie Mathematiques pour letraitement du signal).
Pour dessiner un spectre, on dessine son module et eventuellement son argument.
Exercice 1 On considere le signal s(t) = cos (2 · π · f 0 · t) dans la fenetre d’analyse delongueur 1 et centree en une valeur arbitraire t0. On choisira f 0 = 10.
Calculer le spectre de s et dessiner le module (etudier l’influence sur ce module dela valeur t0).
Meme question, dans des conditions plus realistes, en prenant f 0 = 105.
1.5 Interpretation heuristique du spectre
Elle est fournie par la formule suivante :
s(t) =
S (f ) · e−2iπf tdf
vue dans la partie Mathematiques pour le traitement du signal.
1.6 Signaux analogiques d’energie finie. Densite spec-
trale d’energie
On dit que s est d’energie finie si
|s(t)|2dt est convergente, ce qui est toujours vrai
dans le cas des fenetres d’analyse finies.
8

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 9/63
Dans ce cas, on appelle Densite Spectrale d’Energie (DSE) la fonction |S (f )|2,ce qui est justifie par la formule :
|s(t)|2dt = |S (f )|2df
vue dans la partie Mathematiques pour le traitement du signal.
9
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 10/63
Chapitre 2
Echantillonnage des signauxanalogiques
2.1 Generalites
L’echantillonnage s’effectue en prelevant des valeurs du signal analogique s(t) lorsd’instants regulierement repartis et distants de la periode d’echantillonnage notee T e,c’est a direque l’on considere la suite s(n · T e), l’origine des temps etant arbitrairementfixee et n parcourant l’ensemble des entiers relatifs (si n · T e sort de la fenetre, on affectebien entendu la valeur 0).
L’inverse de la periode d’echantillonnage est appelee frequence d’echantillonnage etnotee f e.
Si l’unite de temps est la seconde, l’unite de frequence est le Hertz.
2.2 Unites normalisees
Pour simplifier l’ecriture des signaux echantillonnes, on travaillera systematiquementavec des unites adaptees a l’echantillonnage appelees unites normalisees.
Une unite normalisee en temps → T e secondes.
Une unite normalisee en frequence → 1/(T e seconde) = f e Hz.Ainsi, s(nT e) s’exprime par s(n) en unite normalisee. On ecrira cependant plutot :
sn.
Exercice 1 On considere le signal analogique de l’exercice 1 de 1-1.4. On echantillonnece signal a la frequence f e = 3 · f 0. Ecrire le signal echantillonne obtenu (en unite nor-malisee) pour chacun des deux cas pour f 0.
10

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 11/63
2.3 Spectre d’un signal echantillonne
Conformement a ce qui a ete dit, un signal echantillonne (souvent appele signaldiscret) est une suite de sn pour les n appartenant a la fenetre d’analyse. Le spectre d’une
tel signal discret est la fonction donnee par la formule suivante : f → n
sn · e−2iπf n
Comme, en pratique, ma fenetre d’analyse est finie, il n’y a pas de probleme deconvergence. Cependant, pour la consideration de signaux modeles abstraits qui peuventavoir une fenetre d’analyse infinie, on doit generaliser cette definition. Pour ceci, onutilise les distributions (vues dans la partie Mathematiques pour le traitement du
signal).
On procede de la maniere suivante :
A la suite des sn, on fait correspondre la distribution :n∈F
sn · δ n, ou δ n est la
distribution de Dirac au point n.
On remarque que si la suite des sn est a croissance lente (ce qui signifie que les sn
en valeur absolue sont majores par par un polynome de n), alors la distribution associeeest temperee. On peut donc considerer sa transformee de Fourier. Ceci justifie que l’onnotera souvent le spectre d’un signal discret s par S ou F s.
Le spectre d’un signal discret est periodique de periode 1. Ceci justifie quetoutes les considerations le concernant ne se font que sur des intervalles de taille 1. (qui
le plus souvent est l’intervalle [-0.5 , 0.5]).
Exercice 1 Chercher le spectre des deux signaux obtenus dans l’exercice 1 du I-1.2
et dessiner le module.
2.4 Interpretation heuristique du spectre
Elle est fournie par la formule : sn =
12
−12
S (f ) · e2iπf ndf
qui provient du fait que la formule : S (f ) =
n∈F n
sn · e−2iπf n permet d’interpreter les
sn.
11

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 12/63
2.5 Signaux discrets d’energie finie. Densite spec-
trale d’energie
On dit que le signal discret s est d’energie finie, si sn est une famille de carre som-
mable, ce qui est toujours vrai dans le cas des fenetres d’analyse finies.
Dans ce cas, l’energie du signal discret est :
n∈F n
|sn|2
La DSE1 est alors la fonction |S (f )|2, ce qui est justifie par la formule :
n∈F n
|sn|2 =
12
−12
|S (f )|2df
2.6 Forme deterministe et discrete du theoreme de
Wiener-Kinchine
Pour un signal s discret d’energie fine, on appelle autocorrelation temporelle en
energie la suite dont la composante d’indice k est : γ s(k) =
n∈F n
sn · sn+k
Alors, le spectre d’autocorrelation temporelle d’energie est la DSE.
Preuve :Le spectre d’autocorrelation temporelle d’energie vaut :
k∈F k
γ s(k) · e−2iπf k =
n∈F n
k∈F k
sn · sn+k · e−2iπf (n+k−n)
=
n∈F n
k∈F k
sn · sn+k · e−2iπf (n+k) · e2iπf n = |S (f )|2 = DS E (f )
(F k = {k/n + k ∈ F n+k)
1(Densite Spectrale d’Energie)
12

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 13/63
2.7 Theoreme d’echantillonnage
Soit s un signal analogique continu et a croissance lente (i.e. |s(t)| est majore parun polynome de la variable t).
On suppose que S (f ) est nulle en dehors d’un certain intervalle de la forme[−f 0,f 0]. On l’echantillonne a une frequence strictement superieure a 2 · f 0. (regle deShannon).
Alors, (en unites normalisees) sur l’intervalle [-0.5 , 0.5], les spectres du signal ana-logique et du signal discret coıncident.
Preuve :
snδ n = s(n)δ n = sδ n regle de calcul vue dans la partie Mathematiques pour le
traitement du signal.
Alors :
sn∈F nδ n = s
n∈F n
δ n.
Le spectre du signal discret vaut donc :
S ∗F
n∈F n
δ n
= S ∗
n∈F n
δ n
d’apres la formule sommatoire de Poisson (vue dans la partie Mathematiques pour
le traitement du signal) et ou ∗ designe le produit de convolution de deux distribu-tions.
Donc, le spectre du signal discret vaut :
n∈F n
S ∗δ n
Or, les hypotheses (en gras) impliquent que pour n = 0, S ∗δ n est nulle sur un certainouvert contenant l’intervalle [-0.5 , 0.5], ce qui acheve la preuve.
Interet theorique de ce theoreme Si on respecte la regle d’echantillonnage, a partirdu signal discret on peut calculer son spectre. Le theoreme nous dit que celui-ci estsur [-0.5 , 0.5]. En effectuant une transformee de Fourier inverse, on recupere le signalanalogique du depart. Ceci montre qu’a partir du signal discret on obtient, par suite
d’operations mathematiques, le signal analogique de depart. Donc, on ne perd pasd’informations en faisant l’echantillonnage.
Limitations pratiques du theoreme En pratique, on a vu que le support du signalest fini. Or, il ressort du theoreme de Paley-Wienner-Schwartz (voir [Schwartz] p.271)qu’alors le spectre ne peut etre aussi a support compact, sauf dans le cas trivial d’unefonction nulle.
13
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 14/63
Dans la pratique, on se contentera de remplacer “S (f ) nulle en dehors ...” par “S (f )negligeable en dehors de . . .”.
Exercice 1 Comparer les spectres obtenus dans les exercices de I-1.4 et I-1.3. Com-
menta interpretez-vous cette comparaison ? (avec le theoreme d’echantillonnage)
Exercice 2 On part du signal analogique modele s(t) = sin(2π1000t), t en secondes.On l’echantillonne a la frequence 1000Hz. Que pensez-vous du resultat obtenu (considerezle theoreme d’echantillonnage) ?
2.8 Quelques exemples concrets
En pratique, lorsque l’on doit echantillonner un signal analogique, on commence par
determiner la plage de frequence utile pour l’application voulue. On fait passer ce signalanalogique dans un filtre passe-bas qui ne garde que la partie frequentielle inferieure aune certaine valeur de coupure f c legerement superieure au maximum des frequencesutiles (de maniere a garder une marge de securite qui compensera le fait qu’on nerespectera pas exactement la regle d’echantillonnage), puis on effectue l’echantillonnagea la frequence 2f c.
Ainsi, un signal telephonique a une frequence utile maximum de 3400Hz. On consideref c = 4000Hz et on echantillonne a la frequence de 8000Hz. Le signal discret obtenu estcode sur 8 bits. Il faudra donc 64 Kb par seconde. Le debit d’une ligne standard de cuivreest de 2048 Kb par seconde (pour comparaison, une ligne en fibre optique possede un
debit de 10 Gb par seconde). On peut donc faire passer 30 communication simultanementavec une ligne standard.
Un signal video de TV possede une frequence utile maximum de 5 MHz. On consideref c = 9 MHz et on echantillonne a la frequence 18 MHz. Le stockage de l’informationvideo prend donc une place considerable, d’ou la necessite de compresser l’informationet d’avoir des supports de grande capacite (DVD par exemple). Par contre, des signauxprovenant de phenomenes physiques ayant une grande inertie (variation de temperature,par exemple) ont des frequences utiles tres faibles (de l’ordre de quelques Hz).
14

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 15/63
Chapitre 3
Transformee en z
3.1 GeneralitesA toute suite sn (n ∈ Z) la transformee en z fait correspondre la somme de de series
entieres et que l’on ecrit formellement :n∈Z
sn · z −n
De maniere precise, cette ecriture represente la somme des deux series entieres sui-vantes :
Pour les indices negatifs strictement :n∈Z
sn · z −n est une serie entiere ordinaire de
rayon de convergence R1.
Pour les indices positifs ou nuls :n∈Z
sn · z −n est une serie entiere par rapport a la
variable 1
z et a pour rayon de convergence R2. Par rapport a z , il y a donc convergence
a l’exterieur du disque de rayon 1
R2.
Donc, l’ensemble des deux series (c’est a direpour la transformee en z ), il y a conver-
gence dans la couronne 1
R2< |z | < R1. Le vocable couronne doit etre pris au sens large.
Notations On notera S Z (z ) la transformee en z de la suite s = (sn)n∈Z. Si le domainede convergence contient le cercle unite, on notera S (f ) la valeur de cette transformee enz au point z = e2iπf , ce qui est bien coherent avec les notations deja introduites car dansce cas, S (f ) represente bien la valeur du spectre du signal discret s pour la frequence f .
S Z (f ) =n∈Z
sne−2iπf n = S
e+2iπf
15

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 16/63
Exercice 1 a et b etant deux reels positifs, on considere la suite sn = an pour n ≥ 0et sn = −bn pour n < 0.
Determinez la transformee en z de cette suite.
3.2 Proprietes elementaires
La transformee en z est lineaire (faire attention au domaine de convergence).
Produit de convolution de deux suites x = (xn)n∈Z et y = (yn)n∈Z etant deuxsuites, on definit le produit de convolution x∗y comme etant la suite dont la composante
d’indice n est :k∈Z
xk · yn−k
Remarquer la coherence avec le produit de convolution de deux distributions, c’est a
direque la distribution associee a x∗y est bien le produit de convolution de la distributionassociee ax par celle associee a y. Ce produit de convolution de deux suites est associatif et commutatif.
On a la formule : “transformee en z (x∗y) = transformee en z (x)×transformee en z (y)dans l’intersection des domaines de convergence. Soit :
∀(x, y) , w = x ∗ y ⇒ W Z = X Z × Y Z
Preuve :
La transformee en z de x∗
y est :
W Z (z ) =n∈Z
k∈Z
xk · yn−k · z −n =n∈Z
k∈Z
xkz k
yn−kz −n+k
= X Z (z ) × Y Z (z )
qui est bien le produit des deux transformees en z associees respectivement a x et y ,dans l’intersection des domaines de convergence.
Formule de retard Si on translate la suite (sn) par k , on a la formule :
“transformee en z (s′) = z −k
·transformee en z (s)”, ou s′ est la suite (sn−k).
Soit : S Z,k(z ) = z −k.S Z (z )
En appliquant cette formule au point z = e2iπf (si ce point appartient au domainede convergence), on obtient la formule de retard du point de vue spectral :
“spectre du signal retarde de k indices = e2iπf · spectre intial ”.
Soit : S Z,k
e−2iπf k
= e−2iπf k.S Z (f )
16

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 17/63
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 18/63
Exercice 1 Traiter les deux cas simples suivants :
S Z (z ) = 1z−a avec le domaine de convergence a l’interieur, puis a l’exterieur du disque
de rayon a.
Remarquer que pour des cas plus generaux il suffit de commencer par faire une
decomposition de la fraction rationnelle en elements simples, avec eventuellement desproduits de Cauchy s’il y a des poles multiples.
Exercice 2 Soient a et b deux reels tels que 0 < a < b. On donne S Z (z ) = z2
(z−a)(z−b)
sur le domaine de convergence la couronne a < |z | < b.
Effectuer l’inversion de la transformee en z .
18
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 19/63
Chapitre 4
Apodisation. Pouvoir separateur del’analyse frequentielle. Analysetemps-frequence
4.1 Effet frequentiel d’une restriction de support
Soit s un signal discret dont on restreint le support. Appelons y le signal discret ainsiobtenu. Si on note wR la suite caracteristique de cette restriction (c’est a dire wR
k = 1si k appartient a la restriction et 0 sinon (a la forme d’une fenetre rectangulaire, d’oula notation)), on peut ecrire : y = x · wR
Montrons maintenant une formule qui donne le spectre de y (y produit de deux suitesx et w). On se place dans les conditions pratiques ou x et w sont des suites finies.
On a alors la formule :
Y (f ) =
12
−12
X (g)W (f − g)dg
Preuve :
12
−12
X (g)W (f − g)dg =
n
xn exp(−2iπgn)
k
wk exp(−2iπ(f − g)n)dg
=
n
k
xnwk exp(−2iπf k)
12
−12
exp(−2iπg(n − k))dg
19

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 20/63
Cette derniere integrale est nulle pour k = n et vaut 1 sinon, ce qui acheve lademonstration.
=n∈N
xn.ωn.e−2iπf n
C’est donc W le spectre de la fenetre w (quelque soit la forme de w) qui intervientdans la deformation du spectre de x.
Exercice 1 On considere une fenetre rectangulaire wR qui vaut 1 pour les indices 0a N − 1 et 0 ailleurs. Calculer son spectre W R et dessiner le module de ce spectre sur[-0.5 , 0.5]. On fera le dessin pour les cas N = 6 et N = 10000.
Reponse : W R(f ) = exp(−iπf (N − 1))sin(πf N )
sin(πf )
DESSIN POUR
|W|
1/6 2/6 1/2
N=6
Lobeprincipal
Lobesecondaire
f
Symétrique
DESSIN POUR
f
N=10000
Exercice 2 En utilisant l’exercice 1 et la formule spectrale de la modulation (vue enI-3.2), determiner presque sans calculs le spectre du signal discret sn = cos(2πf 0n)dans les deux cas suivants :
1. la fenetre d’analyse contient les indices de 0 a 5
2. la fenetre d’analyse contient les indices de 0 a 9999
Faire le dessin.
20

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 21/63
4.2 Apodisation
En examinant la formule obtenue en I-4.1 qui donne le spectre de y le signal res-treint, on constate que la deformation est d’autant moindre que le lobe principal (du
spectre de la fenetre de restriction) est important par rapport aux lobes secondaires etque le support de ce lobe principal est etroit.
L’idee est alors de prendre une fenetre de restriction qui ne soit pas rectangulaire.De nombreuses tentatives on ete faıtes dans ce sens, mais nous ne donnerons ici que laprincipale. On la definit par la formule :
wH =
t + (1 − t)cos
2kπ
N
, si |k| < N
2
0 , sinon
On a alors :
W H (f ) = t sin(πf N )sin(πf )
+ (1 − t)sin
π
f − 1N
N
2sin
π
f − 1N
N + sin
π
f + 1N
N
2sin
π
f + 1N
N
La valeur de t qui optimise l’importance du lobe principal est t = 0.56 (fenetrede Hamming ). L’inconvenient est qu’elle presente une discontinuite aux bords, ce quiprovoque une cassure du signal. En prenant la valeur t = 0.5 on est proche de la valeuroptimale et il n’y a plus de discontinuite aux bords : c’est la fenetre de Hamming dontdont donne le dessin ci-dessous :
f
symétrique
1/N 2/N 3/N
4.3 Pouvoir separateur de l’analyse frequentielle
A cause de l’epaisseur au moins en 2
N du lobe principal, ne peuvent etre separees
que des frequences distantes d’au moins 2
N . En consequence, pour faire une analyse
fine il faut augmenter N (le nombre d’echantillons appartenant a la fenetre d’analyse).Pour augmenter N , il faut augmenter le temps d’observations du signal, ce qui veut direaugmenter la largeur de la fenetre d’analyse.
Remarquer (a titre d’exercice) que faire du sur-echantillonnage ne servirait a rien.
21
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 22/63
4.4 Analyse frequence-temps
On veut suivre l’evolution temporelle du spectre (ou, le plus souvent, de la DSE).Donc, pour avoir une bonne localisation en temps des phenomenes, il faut prendre une
petite fenetre d’analyse. Ceci est cependant contraire a la finesse de l’analyse, commeon l’a vu precedemment. Plus loin, on verra quelques tentatives pour concilier au mieuxces deux imperatifs.
Le principe general de l’analyse frequence-temps consiste a localiser une tranche dusignal en restreignant celui-ci avec une fenetre d’analyse centree en un indice que l’onfait varier pour obtenir l’evolution temporelle et a faire l’analyse frequentielle chercheedans chaque fenetre d’analyse.
Les resultats se representent de deux manieres :
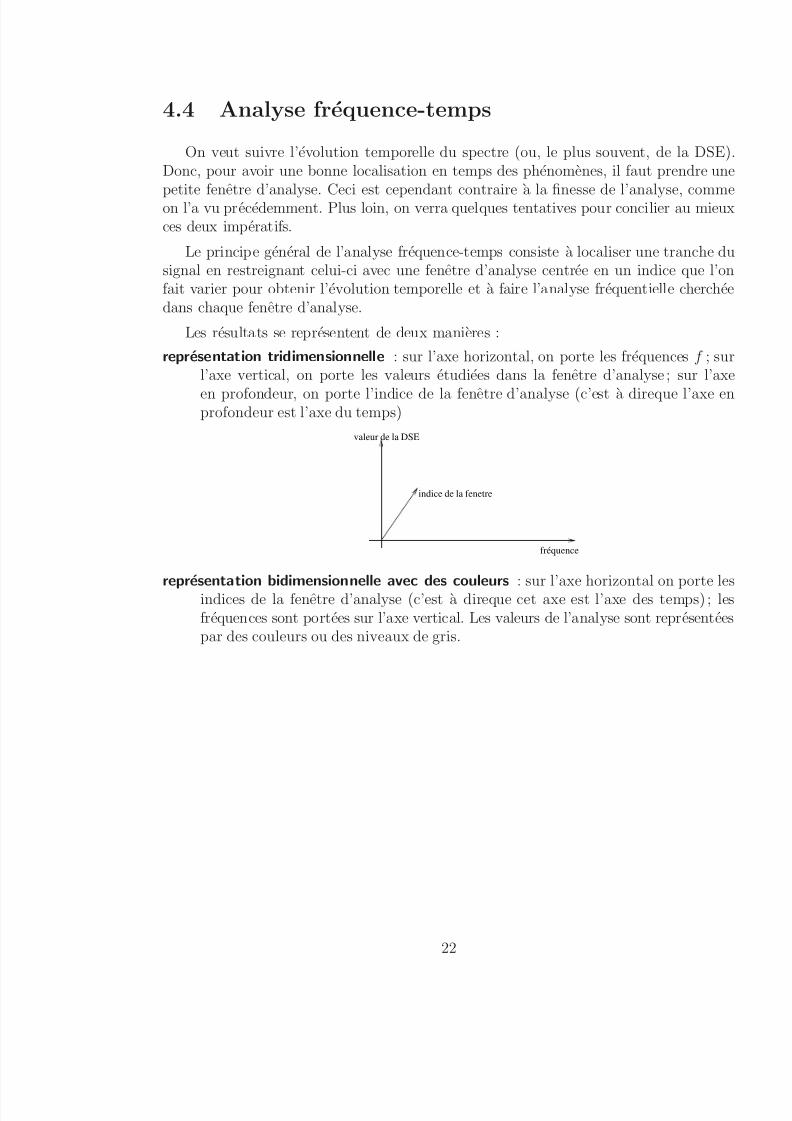
representation tridimensionnelle : sur l’axe horizontal, on porte les frequences f ; surl’axe vertical, on porte les valeurs etudiees dans la fenetre d’analyse ; sur l’axe
en profondeur, on porte l’indice de la fenetre d’analyse (c’est a direque l’axe enprofondeur est l’axe du temps)
indice de la fenetre
valeur de la DSE
fréquence
representation bidimensionnelle avec des couleurs : sur l’axe horizontal on porte lesindices de la fenetre d’analyse (c’est a direque cet axe est l’axe des temps) ; les
frequences sont portees sur l’axe vertical. Les valeurs de l’analyse sont representeespar des couleurs ou des niveaux de gris.
22
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 23/63
Chapitre 5
Introduction au filtrage LIT
(LIT : Lineaire invariant dans le Temps)
5.1 Generalites
En traitement du signal numerique, on appelle filtre un algorithme qui transformeune suite d’entrees (indexee sur Z) en une suite de sorties (indexees sur Z). On dit que lefiltre est lineaire si cette transformation est lineaire. Dans ce cas, on peut dire qu’il s’agitd’un operateur sur l’espace des suites de reels (on pourrait imaginer une generalisationau cas complexe) indexees sur Z.
On dit que le filtre est invariant par translation si cet operateur commute avec toutoperateur de translation sur l’espace des suites. Dans ce cas on dit filtre LIT.
On resume souvent cette situation par le schema ci-dessous :
FILTREentrée :
x = (xn)
sortie
y = (yn)
On supposera toujours que le domaine de cet operateur contient au moins les suitesfinies.
Quelques notations On notera δ n la suite dont la composante d’indice n vaut 1 etdont toutes les autres sont nulles (remarquer la coherence avec la notation classique dela distribution de Dirac, δ n, qui est bien, selon I-2.3, la distribution associee a cettesuite (δ n)).
On appelle reponse impulsionnelle du filtre la sortie correspondant a l’entree δ 0. Leplus souvent, on la notera h.
23
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 24/63
Propriete 1 Sur l’espace des suites finies, un filtre LIT est un operateur de convolution par sa reponse impulsionnel le, c’est a direque l’on a : y = h∗x (ou ∗ designe le produit de convolution de deux suites, introduit au I-3.2 ).
∀k , yk =
kl=0
hl.xk−l
Trois cas peuvent se produire, selon la nature de h :
1. h est finie alors l’operateur de convolution h∗ a pour domaine l’espace de toutesles suites et reciproquement.
Pour obtenir cette reciproque, il suffit d’appliquer le filtre a l’entree definie par
xn = 1
hnsi hn = 0, 0 sinon, et de considerer la composante d’indice 0 de la sortie.
On dit que ce filtre est un filtre RIF (Reponse Impulsionnelle Finie).
2. h est absolument sommable, c’est a diren∈Z
|hn| est convergente, alors l’operateur
de convolution h∗ a un domaine qui contient les suites bornees et l’image de toutesuite bornee est une suite bornee (et reciproquement).
Pour obtenir cette reciproque, il suffit d’appliquer le filtre a l’entree definie parxn = 1 si hn > 0, −1 sinon, et de considerer la composante d’indice 0 de la sortie.On dit que ce filtre est un filtre stable (remarquer que le cas 1 est contenu dans lecas 2).
3. h est tel que
n∈Z|hn| est divergente, alors l’operateur de convolution h∗ ne peut
meme pas s’appliquer a toute suite bornee. Pour cette raison, les filtres nonstables sont a eviter.
Souvent, pour alleger les notations, on designera le filtre par sa reponse impulsion-nelle h.
Causalite Un filtre est dit causal si et seulement si yn ne depend que des xk, aveck ≤ n pour tout n.
Une CNS de causalite est hn = 0 pour tout n < 0.
5.2 Action d’un filtre du point de vue spectral
On appelle fonction de transfert d’un filtre LIT la transformee en z de sa reponseimpulsionnelle h. Elle est donc notee H Z conformement aux notations du I-3. Si ledomaine de convergence de cette transformee en z contient le cercle unite, on rappelleque H (f ) = H Z
e2iπf
.
24

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 25/63
On rappelle la formule fondamentale qui donne l’action d’un filtre LIT de reponseimpulsionnelle h : y = h∗x, avec x l’entree et y la sortie correspondante. Ceci est le pointde vue temporel.
Avec les notations rappelees ci-dessus, cette formule donne (en prenant les transfor-
mations appliquees au point z = e2iπf
) : Y (f ) = H (f )X (f ). Ceci est le point de vuespectral.
Cette formule donne (en prenant les modules et en elevant au carre) : DSE (y) =G(h) · DSE (x), avec G(h) = |H (f )|2 le gain.
DSE y(f ) = |H (f )|2 × DSE x(f )
5.3 Un critere de stabilite
Theoreme 2 On se place dans le cas d’un filtre causal dont la fonction de transfert est
une fraction rationnelle : P (z )
Q(z ).
Ce filtre est stable si et seulement si les zeros de Q sont de module strictement inferieur a 1.
Preuve :
Remarquez d’abord que, pour un filtre causal, les hn sont non nuls pour n < 0, ce
qui implique que le domaine de convergence de la fonction de transfert est l’exterieurd’un disque. Dans notre cas, il s’agit de l’exterieur du disque de rayon “le maximum des modules des zeros de Q”.
Dans le developpement de la fonction en serie entiere de la variable z −1, chaque zerode Q, note a, donne naissance a une serie de la forme1 :
polynome(z −1) ·
n
an · z −n
Dire que le filtre est stable revient a dire que ce developpement converge pour z = 1,
donc que chaque zero de Q est de module strictement inferieur a 1, et reciproquement.
1se referer a la remarque finale de I-3.4
25

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 26/63
5.4 Gabarit d’un filtre
Souvent, c’est le module de X (f ) que l’on cherche a transformer. Le point de vuespectral developpe en I-5.b montre que c’est |H (f )| qui transforme |X (f )| par mul-
tiplication. Donc, on souhaite que |H (f )| ait une forme ideale donnee, appelee D(f ).Comme, en general, on ne peut obtenir exactement cette forme ideale, on se contented”une approximation de |D(f )|, ce qui souvent s’exprime a l’aide d’un gabarit.
Exemple Gabarit pour un filtre passe-bas.
e
1+e
1−e
fcfdp dba f 0.50
– la bande de frequences comprises entre 0 et fdp est appelee bande passante – la bande de frequences comprises entre fdp et dba s’appelle bande de transition – la bande de frequences comprises entre dba et 0.5 s’appelle bande affaiblie
5.5 Cascade de filtres
Si on met en serie (les uns apres les autres) plusieurs filtres LIT, l’associativite duproduit de convolution montre que l’on obtient un filtre LIT dont la reponse impulsion-nelle est le produit de convolution des reponses impulsionnelles de chacun des filtres misen serie (la commutativite du produit de convolution montre que l’ordre des filtres enserie n’a pas d’importance).
On appelle un tel dispositif une cascade de filtres.
h2h1(x*h1)*h2 = x*(h1*h2)x*h1Entrée = x
Du point de vue des fonctions de transfert, la cascade de filtres se traduit par :H 1Z (z ) · H 2Z (z ) = H Z (z ) ce qui signifie que la fonction de transfert de la cascade estle produit des fonctions de transferts des differents filtres qui la composent.
En appliquant ceci au point z = e2iπf , on obtient : H 1(f ) · H 2(f ) = H (f ).
Naturellement, les cascades peuvent contenir plus de deux filtres.
26
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 27/63
Exercice 1 On appelle ordre d’un filtre RIF causal le plus grand indice n tel queh = 0. Considerons le filtre de reponse impulsionnelle h0 = 1, h4 = −1 et pour les autresindices n, hn = 0.
Decomposer ce filtre en une cascade de trois filtres RIF causaux dont deux sont
d’ordre 1 et un est d’ordre 3.
27
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 28/63

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 29/63
6.3 Synthese d’un filtre causal a phase lineaire
On considere une suite de paire de hn pour n de −r a r. Donc :
H (f ) = h0 + 2 ·r
n=1hn cos(2πf n)
On rend le filtre causal en translatant de r la reponse impulsionnelle que l’on vientde definir, ce qui donne : h
′
0 = h−r = hr, h′
1 = hr−1, . . . , h′
r = h0, h′
r+1 = h1, . . . , h′
2r = hr
(h′ = h ∗ δ r).
Le filtre obtenu h′
est evidemment causal et la formule du retard, point de vuespectral, donne : H
′
(f ) = H (f ) ·e−2iπf r ce qui montre que le filtre h′
est a phase lineaireavec r pour temps de propagation a travers le filtre.
Comme de plus
|H
′
(f )
| =
|H (f )
|, on imposera la forme voulue a
|H
|et on effectuera
la translation apres pour obtenir le filtre causal et a phase lineaire voulu.
6.4 Synthese d’un filtre causal, a phase lineaire et
passe-bas par utilisation des moindres carres dis-
crets
C’est donc pour |H | que l’on va chercher a imposer la forme d’une fonction de coupureideale D(f ) (voir schema ci-dessous).
fc
D(f)
0
1
0.5 f
Dans ce cas, cela revient a imposer cette forme a : H (f ) = h0 + 2 ·r
n=1
hn cos(2πf n)
Pour chercher des coefficients hn qui conviennent le mieux possible, on va utiliser lamethode des moindres carres. On place m points de controle (avec m ≫ r) f i (i ∈ [1, m])repartis uniformement sur l’intervalle [0 , 0.5], puis on cherche les hn (n ∈ [0, r]) qui
rendent minimum l’expression :r
n=0
|H (f i) − D(f i)|2
C’est un probleme classique des moindres carres vu dans l’UV Algorithmique Nume-
rique (penser a utiliser la factorisation QR).
29

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 30/63
Remarquer que l’on peut obtenir un filtre avec des precisions variables suivant lesbandes de frequence considerees, en concentrant les points de controle dans les bandesou l’on cherche une meilleure precision (remarquer qu’a cause de la parite des differentesfonctions considerees, on n’impose un controle que sur l’intervalle [0 , 0.5] au lieu de toutl’intervalle [-0.5 , 0.5]).
6.5 Synthese d’un filtre causal, a phase lineaire et
passe-bas par utilisation de l’algorithme de Reme
On commence comme en I-6.4, mais l’approximation de D(f ) par H (f ) se faiten utilisant une variante de l’algorithme de Remes (vu dans l’UV Algorithmique
Numerique). Detaillons cette variante.
L’algorithme de Remes permet de construire le polynome de degre r qui approche
le mieux uniformement sur un intervalle une fonction continue donnee. Ici, D(f ) idealen’est pas continue, mais on se donne comme parametre fbp et dba et dans la bande detransition on considere qu’il y a raccord continu entre les deux parties constantes deD(f ). Il faut remarquer que le changement de variable f → x = x cos(2πf ) etablit une
bijection de [0 , 0.5] sur [-1 , 1] et que H (f ) = h0 + 2 ·r
n=1
hn cos(2πf n) s’ecrit comme
un polynome de degre r par rapport a la variable x (cette remarque fait le lien avecla formulation classique de l’algorithme de Remes, mais la variable x ne sera jamaisconcretement utilisee).
En effet : cos(2kπf ) =
ni=0
αi.xi
Etape 1 de la variante : il faut choisir r + 2 points f i, i ∈ [1, r + 2], de controle pourles frequences entre 0 et 0.5. Il faut obligatoirement choisir fbp et dba et ne plusprendre de points de controle dans la bande de transition. Les r points restanta choisir doivent etre choisis le plus uniformement possible. Il faut calculer lescoefficients hn, n ∈ [0, r] qui realisent l’equioscillation, c’est a diresolution dusysteme lineaire a r + 2 inconnues hn (n ∈ [0, r]) et e, ce systeme ayant pour iieme
equation : H (f i) − D(f i) = (−1)i · e.
|e
| sera appele grandeur de l’equioscil lation .
On fait le test pour verifier si ces hn sont les bons, c’est a direque l’on se donneune tolerance ε et on regarde si |e| est egale, a ε pres, a la borne superieure de|H (f ) − D(f )| pour f parcourant [0 , 0.5]. Si c’est le cas, l’algorithme est termine.
Sinon, etape 2 de la variante : il faut recommencer une etape semblable apres avoirchange de points de controle. Pour obtenir les nouveaux points de controle, il faut,bien entendu, toujours garder fbp et dba et ne pas pas prendre dans la bandede transition. On prend alors fbp et on part vers la gauche jusqu’a rencontrer
30

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 31/63
un premier maximum local pour H (f ) − D(f ). Puis le premier minimum localrencontre, puis le maximum local suivant, le minimum local suivant et ainsi desuite jusqu’a obtention d’autant de points de controle que precedemment. Onprocede de meme a partir de dba en allant vers la droite, mais on commence parchercher le premier minimum local, puis le premier maximum local (on chercheensuite alternativement les minima et maxima locaux).
On fait des etapes successives jusqu’a verification de la condition |e| = sup|H (f )−D(f )| ± ε, pour f ∈ [0, 0.5].
En general (pour des r de l’ordre de la centaine), cet algorithme s’arrete en unedizaine d’etapes.
31
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 32/63
Chapitre 7
Filtres recursifs
7.1 Definition generale d’un filtre recursif
On appelle filtre recursif d’ordre p un filtre qui agit selon la formule donnee ci-dessous,x designant l’entree et y la sortie associee.
∀n , yn =
pk=1
ak · yn−k +
pk=0
bk · xn−k
ou les ak et les bk sont des reels.
Verifions qu’il s’agit bien d’un filtre LIT. Notons a = (ak)1∈[0,p] et b = (bk)k∈[0,p]. Onpose a0 = 1.
Avec ces notations, la formule se recrit : a∗y = b∗x.
Ce qui donne, pour les transformee en z : AZ · Y Z = BZ · X Z .
On a : AZ (z ) = 1 +
pk=1
akz −k et BZ (z ) =
pk=0
bkz −k
On constate que BZ (z )
AZ (z ) peut se developper en serie entiere de la variable z −1 dans
toute couronne qui ne contient aucun zero de AZ . Dans le but d’obtenir un filtre causal,on prendra comme domaine de convergence l’exterieur du disque de rayon “le maximum des modules des zeros de AZ ” (on appellera dorenavant ces zeros de AZ poles du filtre).
Ainsi, a l’exterieur de ce disque, on peut considerer la fraction rationnelle H Z (z ) = BZ (AZ (
dont on peut (en considerant cet exterieur de disque comme domaine de convergence)prendre la transformee en z inverse, ce qui donne une suite h de composantes hn telleque la transformee en z de h est H Z .
Alors, le filtre de reponse impulsionnelle h a pour transformee en z H Z et on a larelation Y Z = H Z · X Z , ce qui correspond bien a la relation y = h∗x.
32

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 33/63
Ceci montre que le filtre recursif est une filtre LIT de reponse impulsionnelle h. Enregardant comment se fait la transformee en z inverse qui donne h1, on constate que∀n < 0 , hn = 0. Le filtre est donc causal.
EN RESUME : un filtre recursif est donne par la formule ci-dessous :
∀n , yn =
pk=1
ak · yn−k +
pk=0
bk · xn−k
C’est un filtre LIT, RII et de fonction de transfert :
H Z = BZ (z )
AZ (z ) =
p
k=0
bkz −k
·
1 +
p
k=1
akz −k
−1
Ce filtre est stable si et seulement si ses poles sont de modules strictement inferieura 1.
Le gain d’un tel filtre est donne par la formule :
g =
bk · e−2iπkf
1 +
ak · e−2iπkf
2
= H
e−2iπkf
La derniere assertion provient du critere de stabilite du I-5.3. Il y a deux cas
particuliers importants :1. Si p = 1 on dit que ce filtre recursif est une cellule elementaire d’ordre 1. Si b1 = 0,
on dit que la cellule est purement recursive.
2. Si p = 2 on dit que ce filtre recursif est une cellule elementaire d’ordre 2. Sib1 = b2 = 0, on dit que la cellule est purement recursive.
En decomposant A et B en produit de polynome (du premier ou second degre si desracines complexes interviennent) en la variable z −1, on obtient la decomposition d’unfiltre recursif quelconque en une cascade de cellules elementaires du premier ou secondordre2.
L’interet des filtres recursifs est qu’ils permettent de faire fonctionner, avec peu decalculs, des filtres RII de bonne qualite. Cependant, l’utilisation de la formule recursiveentraıne une accumulation des erreurs dus aux arrondis de codage et, bien qu’en uti-lisant des filtres stables (au sens du TS), a la longue, les calculs finissent par etrenumeriquement instables.
1voir I-3.d2voir I-5.5
33

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 34/63
Exercice 1 Considerons le filtre recursif agissant suivant la formule yn = 116 y(n − 4) +
xn.
Ce filtre est-il stable ? Decomposer ce filtre en une cascade de cellules elementairesstables. Chercher la reponse impulsionnelle d’un filtre inverse de ce filtre recursif, c’est a
direun filtre tel que, mis en cascade avec le filtre recursif, cela donne l’operateur identite.
7.2 Rappels sur la fonction homographique complexe
C’est la bijection : s
C\{−1} → C\{−1}z → (z − 1) · (z + 1)−1
La reciproque etant : z (s) = (1 + s) · (1 − s)−1.
Remarquer que pour z = e2iπf (pour
|f
|< 0.5), on a s(z ) = i tan(πf ). On en deduit
que la bijection complexe consideree met en correspondance l’interieur du cercle uniteavec le demi-plan complexe des nombres de partie reelle negative strictement.
On utilisera la bijection : s → s′
= s
i = −i · s
Ainsi, pour z parcourant l’axe imaginaire, s′
parcourt l’axe reel. Le paragraphe sui-vant utilise les notations introduites ici.
7.3 Synthese de filtres recursifs par fonctions modeles
7.3.1 Filtre de Butterworth
On appelle fonction de Butterworth une fonction B verifiant |B(s′)| =
1 +
s′
c
2n−
avec c un reel et n un entier impair.
On a : |B(s′
)| =
1 +
si·c
2n−1
Soit :
|B(s
′
)
| = 1
− sc2n
−1
(car 2n est pair)
Ainsi : |B(s′
)| =
2nk=1
s
c − exp
2iπk
2n
−1
|B(s′
)| = (3n−1)/2
k=(n+1)/2
s
c − exp
2iπk
2n
−1
· (−1) · (n−1)/2
k=(3n+1)/2
s
c − exp
2iπk
2n
−1
34

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 35/63
Appelons cette expression “ formule B ”. On pose :
H Z (z ) =
(3n−1)/2
k=(n+1)/2
s
c − exp
2iπk
2n
−1
ou s designe s(z ).
Faisons deux remarques :
1. Les s qui annulent le denominateur de H Z ont une partie reelle strictement negative.Donc les z (s) correspondant sont a l’interieur du disque unite. Ce sont les polesde H Z , donc le filtre qui admet H Z pour fonction de transfert est stable, par lecritere de stabilite vu en I-5.3.
2. Considerons z = e2iπf . Alors, s()z = i tan(πf ) et H Z (z ) = H (f ). D’ou :
H (f ) = (3n−1)/2
k=(n+1)/2
i tan(πf )
c − e
2iπk
2n
−1
et donc : H (f ) =
(3n−1)/2
k=(n+1)/2
− i tan(πf )
c − e
2iπk
2n
−1
Or, les indices k du produit ci-dessus, par ajout de ±n, donnent les indices quiapparaissent dans le second produit de la formule B . Le changeant de i en −iconserve globalement les termes en exponentielle. Par rapport aux termes qui ap-paraissent dans le second produit de la formule B , il n’y a donc aucun changementde signe. Comme cela se produit n fois, avec n impair, le signe global est
−. Ainsi,
H (f ) apparaıt exactement comme le second terme de la formule B .
Ainsi : |H (f )|2 = H (f ) · H (f ) = |B(s′
)|2 = |B(tan(πf ))|2 = 1
1 +
tan(πf )
c
2n
Cette derniere formule permet de verifier aisement que |H (f )|2 est une fonctiondecroissante sur [0 , 0.5[.
Explicitons desormais la formule donnant H Z (s designe s(z ))
H Z (z ) = (3n−1)/2
k=(n+1)/2
s
c −e
2iπk
2n −1
Dans le produit, on isole le terme correspondant a l’indice k = n et on regroupeles autres (2 par 2), qui correspondent a des exp
2iπk
2n
et leurs conjugues. Cela donne
alors :
H Z (z ) =s
c − 1
−1
· (3n−1)/2
k=(n+1)/2
s
c
2
− 2s
c · cos
πk
n
+ 1
−1
35

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 36/63
Pour une ecriture plus agreable, on pose k′
= n − k.
Remarquer que cos
πk
n
= −cos
πk
′
n
. On peut donc ecrire, en utilisant k
′
comme
indice de produit (et en le “renommant” k) :
H Z (z ) =s
c − 1
−1
·(n−1)/2
k=1
s
c
2
+ 2s
c · cos
πk
n
+ 1
−1
Cette fonction de transfert apparaıt sous la forme d’un produit, donc la decompositionen cascade de cellules elementaires est deja faıte. Regardons de plus pres chaque celluleelementaire.
On se rappelle que : s = s(z ) = z − 1z + 1
= 1 − z −1
1 + z −1
Donc, la cellule correspondant as
c + 1
−1
donne :
1
c · 1 − z −1
1 + z −1 + 1
−1
Soit :
c ·
1 + z −1
c + 1 + (c − 1) · z −1
=
c
c + 1 +
c · z −1
c + 1
·
1 + c − 1
c + 1 · z −1
−1
Ecrit sous cette forme, on reconnaıt une cellule elementaire d’ordre 1 qui agit suivant
la formule : yn = −a1yn−1 + b0 + b1xn−1, ou a1 = 1 − c
1 + c et b0 = b1 =
c
c + 1
La cellule correspondant a
s
c
2
+ 2s
c · cos
kπ
n
+ 1
−1
donne le meme type de
calcul. On remplace s par son expression en fonction de z et on effectue les quelques
calculs necessaires pour obtenir un resultat sous la forme : b0 + b1z −1 + b2z −2
1 + a1z −1 + a2z −2
On reconnaıt alors une cellule elementaire du second ordre.
Toutes ces cellules sont stables, car les poles sont de module strictement inferieura 1, d’apres la remarque 1.
Montrons maintenant que, grace a la remarque 2, on peut obliger ce filtre a rentrerdans le gabarit d’un filtre passe-bas, conformement au schema ci-dessous :
36

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 37/63
0 0
0 0
1 1
1 1
01
e2
1−e1
1
f
0.50 fbp fc dba
Les parametres fbp et dba etant donne, on pose f 0 = f bp + dba
2 . f c est la frequence
de coupure du filtre, on pose donc c = s′
(f c) = tan(πf c).
Il decoule alors de la remarque 2 : |H (f )|2 =
1 +
tan(πf )tan(πf c)2n−1
Or, il s’agit d’une fonction decroissante sur [0 , 0.5[. Pour obliger le filtre a rentrerdans le gabarit, il suffit d’imposer les deux conditions suivantes :
1. Condition en fbp : |H (f bp)2 ≥ 1 − ε1.
Ceci se recrit : n ≥ 1
2 · log
1 − ε1
ε1
·
log
tan(πf c)
tan(πfbp)
−1
.
2. Condition en dba : |H (dba)|2 ≤ ε2
Ceci se recrit : n ≥
1
2 ·log1 − ε2
ε2 · logtan(πdba)
tan(πf c)
−1
Ainsi, si on veut imposer au filtre de passer dans un gabarit tres fin, cela entraıneraun grand ordre pour le filtre, ce qui est logique. Dans la pratique, il faut chercher uncompromis entre la qualite du filtre et son ordre.
Remarque Si n est pair, les calculs sont analogues (il n’apparaıt pas de cellule dupremier ordre dans la cascade finale).
7.3.2 Filtres de Tchebitchev
Finalement, si on regarde bien ce fait la qualite du filtre, on s’apercoit que c’est la
propriete que possede le polynome
s′
c
2n
d’etre petit pour les s′
< c et d’etre grand
pour les s′
> c. Or, on sait que les polynomes qui possedent le mieux cette proprietesont les polynomes de Tchebitchev3.
3Voir l’UV Analyse Numerique
37

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 38/63
Ainsi, on ameliore la qualite du filtre (pour un meme ordre) en remplacant
s′
c
2n
par T n
s′
c
2
, ou T n designe le polynome de Tchebitchev de degre n.
Les calculs sont analogues, mais il est plus difficile de decomposer en produit de
facteurs le polynome 1 + T n s
ic
2
que le polynome 1 −s
c
2n
.
Les filtres recursifs ainsi obtenus sont appeles filtres de Tchebitchev .
7.3.3 Filtres elliptiques (Cauer)
Dans le but d’ameliorer encore la propriete (mentionnee ci-dessus) qui conditionnela qualite du filtre recursif obtenu, on remplace maintenant le polynome de Tchebitchev
par le carre d’une fraction rationnelle en
s′
c . Les calculs ensuite sont analogues, maisil est delicat de trouver la bonne fraction rationnelle. Cette recherche fait intervenir lesfonctions elliptiques, d’ou le nom de filtres recursifs elliptiques .
Finalement, ce sont ceux-la qui realisent le meilleur rapport “qualite/ordre”.
38

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 39/63
Deuxieme partie
METHODES STATISTIQUES ENTRAITEMENT DU SIGNAL
39

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 40/63
Chapitre 8
Processus aleatoires discrets
8.1 Exemple
On recoit dans un recepteur une sinusoıde. Supposons qu’on considere que l’indice 0soit le premier indice d’echantillonnage (ce qui est souvent le cas).
Le signal echantillonne s’ecrit : sn = sin(2πf 0n + ξ ) avec f 0 ∈]0, 0.5[. Remarquer quetout choix de ξ dans l’intervalle [0, 2π] est egalement mauvais. La bonne modelisationconsiste a ne pas faire de choix, ce qui revient a dire que ξ est une variable aleatoire quisuit la loi uniforme sur [0, 2π].
S n est alors la variable aleatoire image de ξ par la fonction sin(2πf 0n + ξ ). Commeon est amene a considerer une suite de variables aleatoires, il s’agit d’un processusaleatoire discret1. Pour avoir des notations conformes a l’habitude, on notera S
n (avec
des majuscules pour bien insister sur le fait qu’il s’agit de variables aleatoires).
Alors, les valeurs sn reellement recues sont une realisation possible du processusaleatoire discret.
Le processus aleatoire discret qui modelise le signal effectivement recu sera, engeneral, indexe sur tout Z et a support infini, mais on demande que le signal effec-tivement recu soit une realisation du processus aleatoire discret durant la fenetred’analyse seulement.
1Voir le module Probabilite
40

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 41/63
8.2 Processus aleatoire discret stationnaire
Parmi les processus aleatoires discrets utilises en TS, les processus aleatoires discretsstationnaires jouent un role absolument fondamental. Noua allons nous interesser a eux.
Definition 1 On dit qu’un processus aleatoire discret X = (X n)n∈Z est stationnaire si et seulement si :
1. E (X n) ne depend pas de n. On l’appelle alors moyenne statistique de X et on la note mX (on rappelle que E (X n) designe l’esperance de la variable aleatoire X n).
2. E (X nX n+k) ne depend uniquement que de k. On l’appelle alors autocorrelation statistique de X a l’indice k et on la note γ X (k)
Remarque L’autocorrelation statistique est paire. L’autocorrelation statistique est, envaleur absolue, inferieure ou egale a γ X (0). En effet (X, Y ) → E (XY ) est une forme bi-lineaire symetrique symetrique et, par l’inegalite de Cauchy-Schwartz : |E (X nX n+k)|2 ≤E (X nX n) · E (X n+kX n+k).
Donc : |γ X (k)|2 ≤ γ X (0) · γ X (0)
Et donc : ∀k ∈ Z , |γ X (k)| ≤ γ X (0)
Exercice 1 Montrer que le processus aleatoire du II-1.1 est stationnaire (ξ est sup-pose suivre la loi uniforme sur [0, 2π]).
Exercice 2 Soient A et B deux variables aleatoires independantes entrees et de memevariance. On considere le processus aleatoire discret X n = A ·cos(2πf 0n)+B ·sin(2πf 0n),f 0 ∈ []0, 0.5[. Montrer qu’il est stationnaire.
Le probleme qui se pose alors est celui de l’estimation des caracteristiques statistiquesdu processus aleatoire discret stationnaire, c’est a diresa moyenne statistique et sonautocorrelation statistique. D’apres les principes statistiques, cette estimation se faita l’aide d’un grand nombres de realisations. Meme le plus souvent, on a qu’une seulerealisation. On est alors ramene a introduire la notion d’ergodicite.
41

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 42/63
8.3 Processus aleatoire discret stationnaire ergodique
Definition 2 On dit qu’un processus aleatoire discret stationnaire X est ergodique si et seulement si :
1. Pour chaque realisation fixee : limN →∞
12N + 1
·N
m=−N
xn = mX (moyenne tem-
porelle = moyenne statistique).
2. Pour chaque realisation fixee : ∀k ∈ Z , limN →∞
1
2N + 1 ·
N m=−N
xn · xn+k = γ X (k)
(autocorrelation temporelle en puissance = autocorrelation statistique a l’indice k)
On peut aussi considerer l’ergodicite sous une forme pratiquement equivalente, mais
theoriquement un peu differente :
1. Pour un processus aleatoire discret X : limN →∞
1
2N + 1 ·
N n=−N
X n converge en
probabilite vers mX .
2. Pour un processus aleatoire discret X : ∀k ∈ Z , limN →∞
1
2N + 1 ·
N m=−N
X n · X n+k
converge en probabilite vers γ X (k).
L’interet de l’ergodicite est qu’elle fournit, avec une seule realisation du processusaleatoire discret stationnaire ergodique, une estimation des ses caracteristiques statis-
tiques.
mX ≃ 1
Card(F )
n
xn ou la realisation a lieu dans la fenetre d’analyse F
γ X (k) ≃ 1
Card(F k)
n
xnxn+k ou la sommation a lieu dans la fenetre d’analyse F k2
Exercice 1 Montrer que le processus aleatoire discret stationnaire du II-1.1 est er-
godique (ξ est suppose suivre la loi uniforme sur [0, 2π]).
Remarque Dans la pratique, les signaux ne peuvent, en general, etre modelises parun processus aleatoire discret stationnaire ergodique pour une grande fenetre d’ana-lyse. On considere alors des restrictions a de petites fenetres d’analyse et on effectue lamodelisation sur celles-ci.
2Fenetre des indices n + k, avec n dans la fenetre F
42

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 43/63
Justification de l’ergodicite
On prend la fenetre F = [0, 2N − 1]. On a :
∀(i, j)
∈ F 2 , A(i, j) =
1
N + 1 ×
N
k=0
xi+kx j+k
≃ γ i− j
On a egalement :
∀m ∈ [0, N − 1] , 1
N + 1 ×
N n=0
xn+m ≃ em × mx
ou em est une constante.
8.4 Densite spectrale de puissance (DSP)
Pour un processus aleatoire discret stationnaire X , on va definir la notion de densitespectrale de puissance.
Pour chaque realisation, on considere la restriction sur la fenetre rectangulaire wN
(wN,k = 1 si |k| ≤ N , 0 sinon). Cette restriction peut donc s’ecrire xwN . On est alors en
presence d’un signal discret ordinaire et sa DSP est : 1
2N + 1 · |F (xwN )|2
ou l’on a note (conformement a ce qui a ete dit en I) F (y), pour Y , le spectre
d’un signal discret y (l’usage des majuscules est reserves aux variables aleatoires).Cette consideration ‘etant faıte pour toutes les realisations du processus, on peut, pour
resumer, ecrire : 1
2N + 1|F (XwN )|2
On veut un reel, donc on prend l’esperance de cette variable aleatoire et il fautconsiderer ceci pour des restrictions par des fenetres de plus en plus grandes, c’est adireque l’on fait tendre N vers l’infini.
Ainsi : DSP X = limN →∞
E
1
2N + 1|F (XwN |2)
Le theoreme de Wiener-Kinchine fournit un moyen commode d’obtenir la DSP.
Theoreme 3 Soit X un processus aleatoire discret stationnaire. On note γ X son auto-correlation statistique.
On a alors : DSP X = F (γ X ).
Soit : F (γ X ) =+∞k=0
e−2iπkf = γ 0 ++∞k=0
γ k.cos(2πkf )
43

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 44/63
Preuve :
E = E |F (XwN )|2
2N + 1 = 1
2N + 1 n
k
wN,nwN,n−k exp(−2iπf k)E (X nX n−k)
E =
k
n
wN,nwN,n−k
2N + 1 · γ X (k)
exp(2iπf k) = Fourier(V N )
ou V N est la somme entre parenthese dans l’expression ci-dessus.
Il ne reste plus qu’a faire tendre N vers l’infini. On sait que Fourier est un endo-morphisme continu sur l’ensemble des distributions temperees3. Il suffit alors de voir V N
converge vers γ X dans cet ensemble de distributions, ce qui acheve la demonstration.
Exercice 1 Calculer la DSP du processus vu au I-1.1, avec ξ suivant une loi uniformesur [0, 2π]
8.5 Une application du theoreme de Wiener-Kinchine
methode de Wigner-Ville
La problematique est la suivante. Pour un signal observe dans une petite fenetred’analyse, obtenir une etude de la DSP qui realise au mieux une bonne localisation en
temps et un bon pouvoir separateur en frequence. Ces deux objectifs etant contradic-toires, on va donner une methode qui souvent donne de meilleurs resultats que l’analysede Fourier.
Le principe est de calculer la DSP du signal restreint a une petite fenetre d’analyse F en utilisant le theoreme de Wiener-Kinchine. On considere que le signal etudie pendantla petite fenetre d’analyse utilisee peut se modeliser par un processus aleatoire discretstationnaire ergodique X . On a alors DSP X = F (γ X ). Il faut donc estimer γ X .
Grace a l’ergodicite, on peut considerer l’autocorrelation statistique a l’indice k, que
l’on peut approximer par : 1
Card(F ) ·n∈F
xnxn+k
3Voir la partie : Mathematiques pour le traitement du signal
44

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 45/63
Remarques
1. En theorie, on a ∀k ∈ Z , γ X (k) = γ X (−k) (cette parite intervient fondamentale-ment pour assurer que, par Fourier, on obtient bien un reel). Ici, il ne s’agit qued’estimation, alors on perd cette parite qui est essentielle. Pour la recuperer, on
remplace les γ X (k) par : γ X (k) + γ X (−k)
22. Le nombre d’indices k pour lesquels on peut faire l’estimation des γ X (k) est li-
mite par la consideration de F . Cela n’est pas genant car on ne cherche qu’uneestimation de F (γ X ) qui sera alors donnee par :
F (γ X )(f ) =
k
γ X (k) exp(−2iπf k)
Naturellement, la sommation se fait sur les indices pour lesquels on peut avoirl’estimation de γ X (k).
Cette methode est aussi connue sous le nom de « pseudo transformation de Wigner-Vil le lissee ».
Exercice 1 Comparer tres precisement, au point de vue calculs numeriques conte-nus dans l’algorithme qui estime la DSP, les deux methodes precedemment indiquees(analyse de Fourier et methode de Wigner-Ville).
8.6 Puissance d’un processus aleatoire discret sta-
tionnaire
La puissance du processus est :
12
−12
DSP X (f )df = γ X (0) = 1
N ·
N n=0
x2n
dans le cas ou la DSP est une fonction integrable sur une periode.
En effet, on a :
12
−12
DSP X (f )df =
12
−12
+∞n=−∞
γ X (n) exp(−2iπf n)df
(d’apres le theoreme de Winer-Kinchine). Or : n = 0 ⇒ 12
−12
exp(−2iπf n)df = 0.
Ceci acheve le calcul.
45
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 46/63
Chapitre 9
Bruit blanc : modelisation AR
9.1 Generalites sur le bruit blanc
En general, la notion de bruit est assez subjective. Toutefois, le bruit blanc (qui joueun role absolument fondamental dans le traitement des signaux faisant intervenir dubruit) peut se definir de maniere intrinseque.
Definition 3 Un processus aleatoire discret B = (Bn)n∈Z est appele bruit blanc si et seulement si les Bn sont des variables aleatoires centrees, de meme variance et independantes deux a deux.
Un processus aleatoire discret X est dit Gaussien si et seulement si tous les couples ( X n, X k) sont Gaussiens 1.
Propriete 4 Un bruit blanc est un processus aleatoire discret stationnaire avec une moyenne statistique nulle, une autocorrelation statistique γ B = variance δ 0 et DSP B =variance.
(la preuve est immediate)
Reciproquement, un processus stationnaire verifiant les trois conditions mentionnees ci-dessus est un bruit blanc.
Preuve :
Puisque la DSP est constante, c’est que l’autocorrelation statistique vaut cetteconstante δ 0. Alors, pour k = 0, γ B(k) = 0 = covariance(Bn, Bn+k). Donc, tous cescouples sont independants, car gaussiens2.
De plus : ∀n, γ B(0) = variance(Bn). Donc celle-ci est constante.
On rappelle que : γ (0) = DSP (f ) = Puissance(Bruit)
1Voir le module Probabilite2Voir le module Probabilites
46

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 47/63
9.2 Modelisation AR
Definition 4 Soit Y un processus aleatoire discret stationnaire. On appelle modelisation
AR une ecriture : ∀
n , Y n =
p
k=1
akY n−k + X n, ou X est un bruit blanc.
Regardons un exemple, la modelisation AR du signal de parole.
Le signal de parole ne peut pas se modeliser par un processus aleatoire discret sta-tionnaire pendant une grande fenetre d’analyse, mais en considerant de petites fenetres(de l’ordre de 25 mms environ), on peut assez bien considerer que le processus eststationnaire. Pour les langues europeennes, la modelisation europeenne donne de bonsresultats avec p ≃ 10 (il faut p ≃ 18 pour les langues asiatiques).
Le signal de parole est couramment echantillonne a 12KHz, ce qui fait 300 echantillons
pour la fenetre, alors que la restitution du signal avec la modelisation AR ne necessiteque 10 coefficients dans le cas d’un son non voise et un peu plus pour les sons voises.Cela donne donc une compression importante de l’information.
Recherche des coefficients de la modelisation AR On ecrit la formule de
prediction recursive : Y ∗n =
pk=1
akY n−k
On cherche a minimiser la puissance de l’erreur de prediction Y n − Y ∗n = X n. X apparaıt donc comme une erreur de prediction. C’est pourquoi on considere qu’il doitetre un bruit blanc. Maintenant, pour continuer, on peut avoir deux points de vuelegerement differents, mais qui donnent des resultats assez semblables.
Premier point de vue Minimiser la puissance de :
X = γ X (0) = E (X 0X 0) =
n
k
anakE (Y −nY −k) + 2
k
akE (Y −kY 0) + E (Y 0Y 0)
γ X (0) =
n
k
anakγ Y (n−k) + 2
k
akγ Y (k) + γ Y (0)
Ce qui, classiquement, donne le systeme lineaire a p equations, dont la numero iest :
pk=1
akγ Y (k) = −γ Y (n)
Ce systeme fait intervenir la matrice de Tœplitz d’ordre p et dont les coefficientsde coordonnees (n,k) sont les γ Y (n+k). On sait que la resolution de tels systemesdonnent souvent des calculs numeriques instables3.
3Voir l’UV Algorithmique numerique
47

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 48/63
Autre point de vue On va chercher les coefficients ak pour que, lors d’une realisation duprocessus, la prediction approche le mieux possible (au sens des moindres carres4)le signal recu. On a alors un probleme classique aux moindres carres : M · a = −y,ou M ∈ Mm,p (on suppose m ≫ p) est la matrice de coefficients yn−k (m est lenombre d’echantillons du signal observe que l’on prend en compte), ou le vecteura ∈ M p,1 est le vecteur des coefficients recherches et ou le vecteur y ∈ Mm,1 est levecteur des observations (yn).
Il est preferable, pour des raisons de stabilites des calculs5, d’utiliser la methodede la factorisation QR pour resoudre me probleme aux moindres carres.
Exercice 1 Cependant, si on utilise le second point de vue, la methode des equationsnormales6 pour resoudre resoudre le probleme des moindres carres, ecrire alors le systemea resoudre.
Revenons au premier point de vue avec la matrice de Tœplitz. Ses coefficients ainsi
que le second membre font intervenir les γ Y (k), qu’il faut estimer a l’aide du signalobserve (en supposant que le processus qui le modelise est ergodique). Ecrire alorscomment s’exprime le systeme a resoudre et comparer avec celui du second point devue, si on utilisait la methodes des equations normales.
4Voir l’UV Algorithmique numerique5Voir l’UV Algorithmique numerique6Voir l’UV Algorithmique numerique
48
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 49/63
Chapitre 10
Couple stationnaire. Intercorrelation
10.1 Couple de processus aleatoires discrets station-naire
Definition 5 On dit qu’un couple ( X ,Y ) de processus aleatoires discrets est station-naire si et seulement si chaque processus est stationnaire et si on a une intercorrelation statistique entre X et Y pour tout indice k, c’est a dire ∀k, γ X,Y (k) = E (X nY n+k) depend uniquement de k.
Remarque L’autocorrelation statistique d’un processus aleatoire discret stationnaire
X est l’intercorrelation de X avec lui-meme.
Propriete 5 On a : ∀k, |γ X,Y (k)|2 ≤ γ X (0)γ Y (0)
Preuve :
L’inegalite de Cauchy-Schwartz (deja utilisee en II-1.2) donne : |E (X 0Y k)|2 ≤|E (X 0)|2|E (Y 0)|2
Exemple important Soit un processus aleatoire discret stationnaire X . Le coupleforme par ce processus et par le processus X retarde de r indices forment un couplestationnaire. On note δ ∗r X le processus X retarde de r indices (c’est a direque sa com-posante d’indice n est X n−r). La notation * est conforme a la notation du produit deconvolution de deux suites introduite en I-3.2. L’intercorrelation statistique entre X et δ ∗r X a l’indice k vaut γ X (k−r).
Ce qui s’ecrit encore : γ X,δ∗rX (k) = γ X (k−r).
49

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 50/63
En consequence, l’intercorrelation statistique entre X et δ ∗r X admet un maximumpour l’indice r (en effet, γ X (k−r) admet un maximum pour k = r1).
Dans la pratique, on doit souvent estimer l’intercorrelation statistique d’un couple(X ,Y ). Cette estimation, suivant les principes statistiques, necessite un grand nombre
de realisations independantes du couple, ce que l’on a, en general, pas, car ne recevantqu’une seule realisation. On est alors amene a introduire la notion d’ergodicite d’uncouple stationnaire.
10.2 Couple aleatoire discret stationnaire ergodique
Definition 6 Un couple ( X ,Y ) aleatoire discret stationnaire est ergodique si et seule-ment si chaque processus est ergodique et si, pour chaque realisation fixee :
∀k , limN →∞
1
2N + 1
N n=−N
xnyn−k = γ X,Y (k)
(intercorrelation temporelle en puissance = intercorrelation statistique a l’indice k)
On peut egalement considerer l’ergodicite sous une forme pratiquement equivalente,mais theoriquement un peu differente :
∀k , limN →∞
1
2N + 1
N
n=−N
X nY n+k converge en probabilite vers γ X,Y (k)
L’interet de l’ergodicite est qu’elle fournit une estimation, avec une seule realisation,
de ses caracteristiques statistiques : γ X,Y (k) ≃ 1
Card(F ) ·
n∈F k
xnyn−k
.
ou F k designe la fenetre dont les indices sont les n + k, avec n ∈ F fenetre d’analyse.
1Voir la remarque du II-1.2
50

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 51/63
10.3 Intercorrelateur
L’algorithme (ainsi que sa realisation materielle) qui recoit en entree une realisation(x,y) du couple (X ,Y ), suppose stationnaire ergodique, et qui donne en sortie l’inter-
correlation est appele intercorrelateur.Conformement a ce qui a ete dit ci-dessus, cet algorithme calcule a l’instant d’indice
m les quantites : 1
2N + 1
n/n+k∈F
xnyn−k
Le dernier indice de la fenetre ou s’effectue cette sommation est l’indice m.
Remarquer que le nombre d’indices k pour lesquels on peut estimer l’intercorrelationstatistique est limite par les considerations de fenetres utilisees, ce qui n’est pas genantpuisque, en pratique, l’intercorrelation est une suite qui decroıt rapidement.
Clipping Soit (X ,Y ) un couple gaussien. On considere le couple avec clipping (X C ,Y C )ou X C = 1 si E (X ) > 0 et 0 sinon (de meme pour Y ).
On se place dans le cas simplifie ou les deux esperances sont nulles, ce qui est le casstandard dans les applications.
On a alors la formule :E (XY ) = −σX σY cos (2πE (X cY c)) avec σX et σY les ecartstypes respectifs de X et de Y .
Remarquer que cela donne : γ X,Y = −√ γ X (0)γ Y (0) cos(2πγ X C ,Y C )
Comme γ X C ,Y C varie entre 0 et 0.5 et que la fonction t → cos(2πt) est croissante sur[0 , 0.5], les deux suites (γ X,Y (k))k et (γ X C ,Y C (k))k ont presque la meme forme et elles ont
memes extremas locaux.Des considerations precedentes, on deduit (en supposant que l’on a affaire a des
couples gaussiens (X n,Y n+k), hypothese raisonnable en vertu du theoreme central li-mite2) le principe d’un intercorrelateur qui n’affecte aucun calcul arithmetique, maisqui uniquement le nombre de fois que les xn et yn+k sont simultanement positifs stric-
tement dans la formule :
n/(n−k)∈F
xnyn+k
2Voir module Probabilites
51
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 52/63
10.4 Application a la localisation d’une source de
bruit
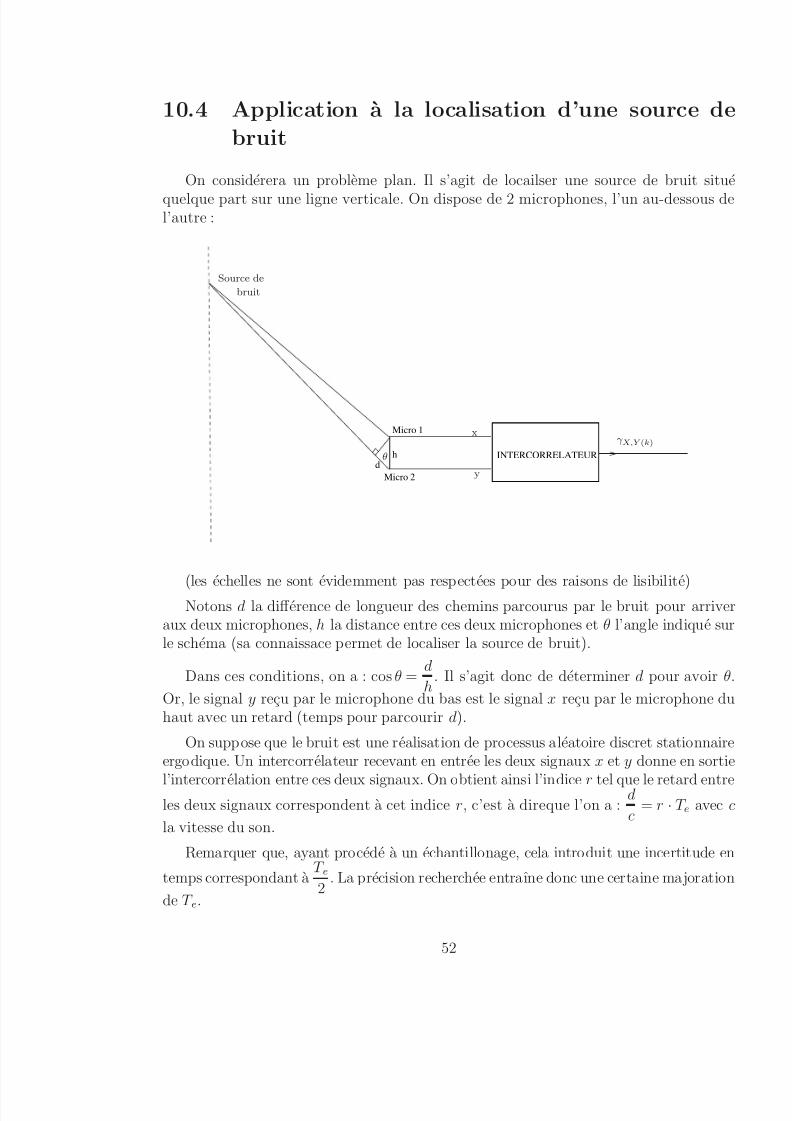
On considerera un probleme plan. Il s’agit de locailser une source de bruit situe
quelque part sur une ligne verticale. On dispose de 2 microphones, l’un au-dessous del’autre :
Micro 2
Micro 1
h INTERCORRELATEURd
γ X,Y (k)
θ
Source de
bruit
x
y
(les echelles ne sont evidemment pas respectees pour des raisons de lisibilite)Notons d la difference de longueur des chemins parcourus par le bruit pour arriver
aux deux microphones, h la distance entre ces deux microphones et θ l’angle indique surle schema (sa connaissace permet de localiser la source de bruit).
Dans ces conditions, on a : cos θ = d
h. Il s’agit donc de determiner d pour avoir θ.
Or, le signal y recu par le microphone du bas est le signal x recu par le microphone duhaut avec un retard (temps pour parcourir d).
On suppose que le bruit est une realisation de processus aleatoire discret stationnaireergodique. Un intercorrelateur recevant en entree les deux signaux x et y donne en sortie
l’intercorrelation entre ces deux signaux. On obtient ainsi l’indice r tel que le retard entreles deux signaux correspondent a cet indice r, c’est a direque l’on a :
d
c = r · T e avec c
la vitesse du son.
Remarquer que, ayant procede a un echantillonage, cela introduit une incertitude en
temps correspondant a T e
2 . La precision recherchee entraıne donc une certaine majoration
de T e.
52
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 53/63
Chapitre 11
Introduction au filtrage LIT desprocessus aleatoires
11.1 Generalites sur le filtrage LIT des processusaleatoires
Considerons un processus aleatoire discret X et un filtre LIT de reponse impulsion-nelle h. Pour chaque realisation x du processus d’entree, la sortie y verifie y = h∗x.COmme cette relation a lieu pour toutes les realisations x de X et toutes les sorties ycorrespondantes, on peut resumer ceci comme suit : « les sorties y sont les realisationsd’un certain processus Y , lie a X par la relation Y = h∗X ».
Y s’appelle le processus de sortie du filtre, correspondant au processus d’entree X .Ainsi, concretement, ce sont des realisations de processus qui entrent et sortent du filtre.
Dans toute la suite, tous les filtres consideres seront supposes STABLES(sans que cela soit necessairement rappele a chaque fois).
Theoreme 6 On considere un filtre LIT stable de reponse impulsionnelle h. Soit X un processus aleatoire discret stationnaire passe en entree de ce filtre.
Alors, la sortie Y correspondante est un processus aleatoire discret satationnaire tel
que : mY = mX +
n hn et γ Y = γ X ∗ γ h ( γ h designe l’autocorrelation temporelle en energie de la suite h1)
On a de plus : DSP Y = DS P X Gain(h) (on rappelle 2 que Gain(h) = |H |2)
1Voir I-1.62I-5.2
53

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 54/63
Preuve :
Y = h ∗ X , ce qui s’ecrit egalement : Y n =
k
hkX n−k
Donc, on en deduit : E (Y n) =
khkE (X n−k) =
k
hkmX
Ceci montre la premiere formule. On a aussi :
Y nY n+k =
m
l
hmX n−mhlX n+k−l
En en deduit alors :
E (Y nY n+k) = m
l
hmhlE (X n−mX n+k−l) = k
l
hmhlγ X (k+m−l)
En posant p = m − l, on obtient alors :
E (Y nY n+k) =
p
m
hmhm + p
γ X (k− p) =
p
γ h( p)γ X (k− p) = (γ h ∗ γ X )k
Ceci acheve alors la demonstration de la seconde formule.
On obtient aisement toutes les convergences voulues si on remarque que la stabilitedu filtre implique que la suite γ h est absolument sommable. En prenant la transformee enz au point e2iπf de la formule γ Y = γ h ∗ γ X , on obtient : DSP Y (f ) = DSP X (f )Gain(h)(en utilisant le theoreme de Wiener-Kinchine sous sa forme deterministe3 et sous saforme aleatoire4).
Exercice 1 On considere une cellule elementaire du premier ordre qui qgit selon laformule yn = ayn−1 + xn avec a ∈]0, 1[. Si l’entree est un bruit blanc, quelle est la DSPdu processus de sortie ?
Exercice 2 On considere un filtre causal stable et de reponse impulsionnelle h. Sil’entree est un bruit blanc, chercher l’intercorrelation statistique entre l’entree et lasortie.
3Voir I-2.64Voir II-1.4
54

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 55/63
11.2 Methode haute resolution utilisant la modelisation
AR
Le probleme etudie ici est le meme qu’en II-1.5 : methode de Wigner-Ville. Il s’agit
de concilier au mieux lors de l’analyse frequence-temps deux imperatifs contradictoiresqui sont, d’une part, assurer une bonne localisation en temps et, d’autre part, d’assurerun bon pouvoir separateur en frequence.
La tentative consiste, avec une petite fenetre d’analyse(permettant une bonne loca-lisation en temps) a obtenir une modelisation AR du signal y recu, que l’on considerecomme une realisation d’un processus aleatoire discret stationnaire Y , c’est a dire unerelation de la forme :
∀n , Y n = − p
k=1
akY n−k + X n
avec X un bruit blanc. Cette relation permet de considerer le processus Y commela sortie d’un filtre recursif d’ordre p ayant pour coefficients recursifs les −ak, k ∈ [1, p],avec comme entree un bruit blanc.
La DSP de Y est alors donnee par la formule5 : DSP Y = DSP X Gain(h)
On rappelle que pour le filtre considere, on a :
Gain(h)(f ) =
1 +
pk=1
ak exp(−2iπf k)
−2
5Voir II-4.1
55
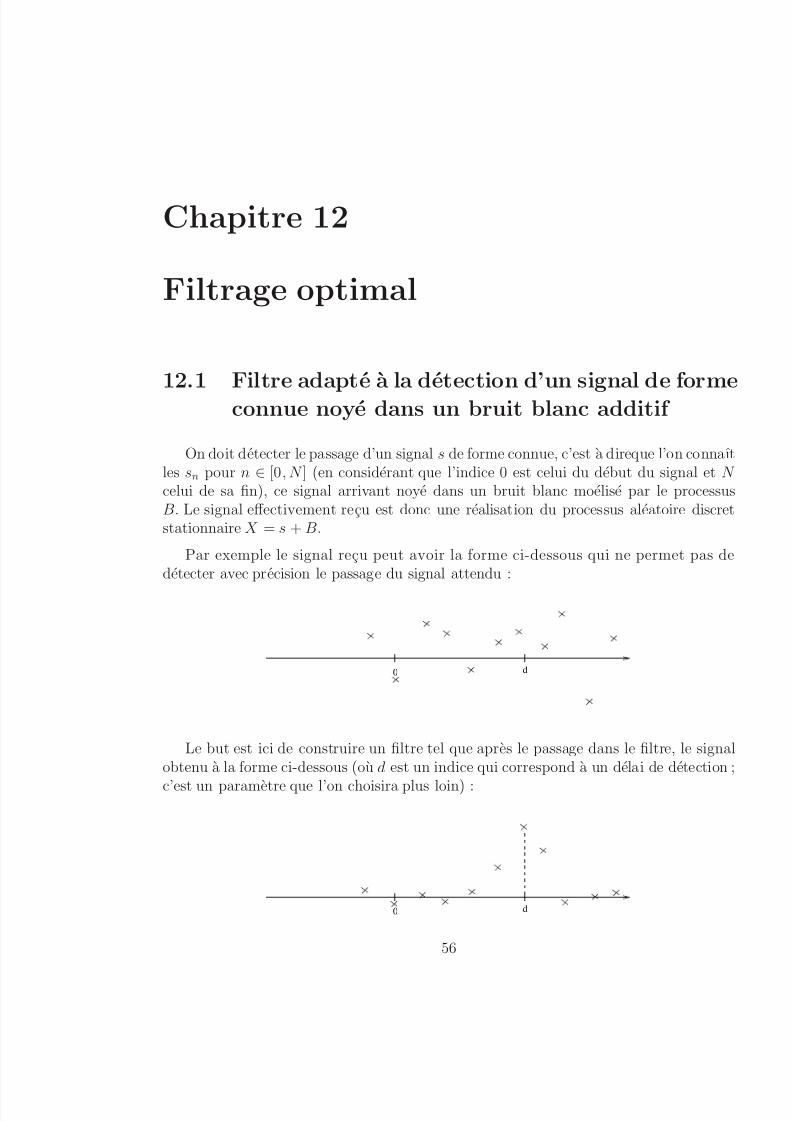
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 56/63
Chapitre 12
Filtrage optimal
12.1 Filtre adapte a la detection d’un signal de formeconnue noye dans un bruit blanc additif
On doit detecter le passage d’un signal s de forme connue, c’est a direque l’on connaıtles sn pour n ∈ [0, N ] (en considerant que l’indice 0 est celui du debut du signal et N celui de sa fin), ce signal arrivant noye dans un bruit blanc moelise par le processusB. Le signal effectivement recu est donc une realisation du processus aleatoire discretstationnaire X = s + B.
Par exemple le signal recu peut avoir la forme ci-dessous qui ne permet pas dedetecter avec precision le passage du signal attendu :
0 d
Le but est ici de construire un filtre tel que apres le passage dans le filtre, le signalobtenu a la forme ci-dessous (ou d est un indice qui correspond a un delai de detection ;
c’est un parametre que l’on choisira plus loin) :
0 d
56

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 57/63
A l’entree du filtre, on a le processus aleatoire discret stationnaire X = s + B .En sortie, on obtiendra donc le processus aleatoire discret stationnaire1 Y = h ∗ X =h ∗ s + h ∗ B
Le principe suivi est de chercher le filtre qui rend maximum a l’indice d le rapport
ρ entre le signal de sortie et le bruit de sortie : h ∗ sh ∗ B
. Precisement, compte tenu de la
nature de h*s et de celle de h*B, ce rapport est : ρ = |(s ∗ h)d|2
puissance(h ∗ B)
On note P = puissance(h ∗ B). On a alors : P =
12
−12
DSP (f )df =
12
−12
|H (f )|2σ2df
avec σ2 = V ar(B).
Donc 2 : P = σ2
12
−1
2
|H (f )|2df = σ2 ·n
h2n
De plus, on a : |(s ∗ h)d|2 =
n
snhd−n
2
≤
n
s2n
n
h2n
On a simplement ecrit que le produit scalaire des vecteurs s et h (ou la composanted’indice n de h est hd−n) est inferieur ou egal au produit des normes. L’egalite ayantlieu pour s et h colineaires.
Des considerations ci-dessus, il ressort que : ρ ≤ 1
σ2
n
s2n
l’egalite ayant lieu lorsque s et h sont colineaires. Donc, un maximum de ρ est obtenupour h = s, c’est a direlorsque, pour tout n, hd−n = sn. Ceci s’ecrit aussi : hn = sd−n (iln’y a donc pas unicite du resultat (a une constante pres)).
Ce resultat hn = sd−n, pour n tel que d − n ∈ [0, N ], ne donne donc un filtre causalque si d ≥ N
En generla, on souhaite que le filtre soit causal. Si d < N , on prend par definition :hn = sd−n pour n ∈ [0, d] et hn = 0 sinon. Le filtre ainsi obtenu est bien causal, mais iln’est pas plus tout a fait optimal (voir qu’un raisonnement heuristique simple montrequ’il est naturel que si le delai d est strictement inferieur a la longueur du signal a
detecter, alors le filtre adapte s’il est causal ne peut etre optimal).
Exercice 1 Etudier le cas d’un signal s constant de longueur N + 1.
1Voir II-4.12Voir I-2.5
57

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 58/63
12.2 Filtre adapte a la detection d’un signal de forme
connue noye dans un bruit colore additif
Maintenant la difficulte supplementaire est que le signal s de forme connue arrive
noye dans un bruit Bc colore, c’est a direque sa DSP n’est pas constante. L’idee estde se ramener au cas d’un bruit blanc, grace a une etape preliminaire, ou, avec un“blanchisseur ”, on transforme le bruit colore en un bruit blanc B .
12.2.1 Construction du filtre blanchisseur
On utilise la formule deja vue DSP Bc(f ) = DSP B(f ) = constante. Cette formulenous donne (a une constante pres) le gain du filtre recherche. Celui-ci nous permet alorsd’obtenir le filtre cherche. Ainsi, en sortie de ce filtre de reponse impulsionnelle h1, onobtient : h1
∗s + h1
∗Bc = h1
∗s + B.
12.2.2 Construction du second filtre
L’action du premier filtre h1 ramene au cas precedent3, ou l’on souhaite det’ecter unsignal de forme connue noye dans un bruit blanc. On construit alors un second filtre dereponse impulsionnelle h2 adapte a la detection de h1 ∗ s, comme indique precedement.
Le filtre adapte finalement obtenu dans le cas d’un bruit colore est compose de lacascade des deux filtres construits ci-avant, conformement au schema ci-dessous :
s + Bc h1 ∗ s + B h
2 ∗ h
1 ∗ s + h
2 ∗ B
h1 h2
Exercice 1 Le signal a detecter est le meme que dans l’exercice precedent. C’est undignal constant de longueur N + 1, mais il arrive ici noye dans un bruit colore Bc dontla DSP est donnee par la formule : DSP Bc(f ) = 1 + a − 2a · cos(2πf ), avec a ∈]0, 1[
3Voir II-5.1
58

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 59/63
12.3 Estimation lineaire
Nous allons donner le principe general de l’estimation lineaire. Il s’agit d’estimerune grandeur a realisation d’une certaine variable aleatoire A a partir d’observations xn
(n ∈ [0, p]) qui sont une realisation de variables aleatoires X n.
A∗ =
pk=0
αkX k
On cherche les coefficents αk qui rendent minimum la moyenne quadratique de l’er-reur d’estimation, c’est a direqui minimise E ((A − A∗)2).
En considerant, sur l’espace des variables aleatoires de variance finie, le produitscalaire < X, Y >= E (XY ), E ((A − A∗)2) apparaıt comme le carre de la norme de(A − A∗). Il s’agit donc de minimiser cette norme, ou A∗ appartient au sous-espace
vectoriel engendre par (X k)k∈[0,p]. A∗ est donc la projection orthogonal sur ce sous-espace vectoriel de dimension finie. Une caracterisation de A∗ est alors : (A − A∗) estorthogonal a tous les vecteurs X k (k ∈ [0, p]). C’est ce que nous allons pour obtenirle systeme lineaire qui determinera les inconnues αk. L’equation m de ce systeme a pequations est : < A ∗ −A, X m >= 0. Ce qui s’ecrit aussi : E (A · X m) = E (A ∗ ·X m)
E
p
k=1
αkX kX m
= E (A · X m)
Finalement, l’equation m du systeme est la suivante :
pk=1
αkE (A ∗ ·X m) = E (A · X m)
On peut facilement verifier que la matrice de ce systeme est symetrique definie po-sitive, ce qui assure l’existence et l’unicite de la solution.
59

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 60/63

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 61/63

7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 62/63
12.6 Filtre debruiteur de Wiener
Dans cette application, on a en entree un signal a noye additivement dans un bruitB. Le signal recu est donc une realisation du processus X = A + B. Il s’agit d’estimer
A avec l’observation X , c’est a direde debruiter l’observation.
Le processus A qui modelise a etant suppose stationnaire, il s’en suit que le couple(X ,A) est stationnaire et que son intercorrelation statistique egale l’autocorrelation sta-tistique du processus A (car naturellement, on suppose A et B independants).
De plus, il est aise de voir que, dans ces conditions, X est un processus aleatoire dis-cret stationnaire dont l’autocorrelation statistique vaut γ X (k) = E ((An+Bn)(An+kBn+k)) γ A(k)γ B(k).
Ceci donne : γ X = γ A + σ2δ 0, ou σ 2 designe la variance du bruit B . Donc :
γ X,A = γ A = γ X − σ2δ 0
Le systeme a p equations qui donne les coefficents de ce filtre RIF debruiter d’ordre
p est donc tel que son equation m est la suivante :
pk=0
αkγ X (k−m) = γ X (m) − σ2δ 0
Naturellement, dans les cas concrets, on a a estimer les coefficents de ce systeme. σ 2
et γ X (k) sont estimes avec un intercorrelateur6 en supposant les proprietes d’ergodicitenecessaires.
Exercice 1 Le signal a est un signal constant egal a 1. Donc X = 1+B. Etudier le filtredebruiteur de Wiener. COmme estimateur de a (a l’instant n), on peut naturellementpenser a l’estimateur classique de moyenne des observations (note X n). Comparer cetestimateur avec An∗, celui donne par le filtre de Wiener, en comparant leur biais et les
quantites : E ((An ∗ −A)2) et E
X n − a2
.
Exercice 2 Chercher le filtre de Wiener debruiteur pour le debruitage d’une sinusoıde(dont on ne connaıt pas la phase a l’origine7) noyee additivement dans un bruit blanc.
6Voir II-3.37Voir II-1.1
62
7/17/2019 Traitement Sig
http://slidepdf.com/reader/full/traitement-sig 63/63
BIBLIOGRAPHIE
Mathematiques
G. Coeure : Methodes mathematiques pour la physique et les sciences appliquees ,Dunod Universite, ISBN 2-04-010684-7
P. Kree, J. Vauthier : Cours de l’universite Pierer et Marie Curie. Mathematiques,Tome II , Eska, ISBN 2-86911-021-9
L. Schwartz : Theorie des distributions , Hermann, ISBN 2-7056-5551-4
Traitement du signal
M. Bellanger : Traitement numerique du signal , Masson, ISBN 2-225-81175-X
M. Charbit : ´ Elements de theorie du signal : aspects alatoires , Ellipse, ISBN 2-7298-5640-4
F. Coulomb : Theorie et traitement des signaux , Dunod, ISBN 2-04-015778-6
B. Lacaze : Processus aleatoires pour communications numeriques , Hermes sciences,ISBN 2-7462-0101-1
M Najim : Modelisation et identification en traitement du signal Masson ISBN 2


















