API RP 11L - Design calculation for sucker rod pumping system
Upload
jainik-jainCategory
view
685download
54
Section I
Sucker Rod Pumping

1.1 Introduction
Advantages• provides mechanical energy to lift oil• efficient, simple and easy to operate• pumps a well down to very low pressure• applicable to slim holes, multiple completions, and high-temperature and viscous oils
• easy to change to other wells with minimum cost
Disadvantages• excessive friction in crooked/deviated holes• solid-sensitive problems• low efficiency in gassy wells• limited depth due to rod capacity• bulky in offshore operations.

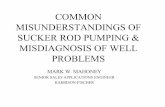
1.2 PumpingSystem


Pitm
an
Well Load
Fulcrum
Force
CounterBalance
Walking Beam
(a) Conventional Unit

Fulcrum
Pitm
an Force
CounterBalance
Well Load
Walking Beam
(b) Lufkin Mark II Unit

Fulcrum
Pitm
an
Force
Cou
nter
Bal
ance
Walking Beam
Well Load
(c) Air-Balanced Unit

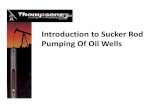
Figure 1-3: The pumping cycle: (a) plunger moving down, near bottom of stroke; (b) plunger moving up, near bottom of stroke; (c) plunger moving up, near top of stroke; (d)
plunger moving down, near top of stroke (From Nind, 1964)

Figure 1-4: Two types of plunger pumps (From Nind, 1964)

1.3 Polished Rod Motion
Figure 1-5

G
I
HR
P
AC
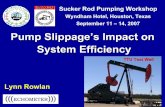
Figure 1-6: Definitions of conventional pumping unit API geometry dimensions

Table 1-1: Conventional pumping unit API geometry dimensions
A C I P H G R1, R2, R3 Cs
(in.) (in.) (in.) (in.) (in.) (in.) (in.) (lb)
C-912D-365-168 210 120.03 120 148.5 237.88 86.88 47, 41, 35 -1500 80.32C-912D-305-168 210 120.03 120 148.5 237.88 86.88 47, 41, 35 -1500 80.32C-640D-365-168 210 120.03 120 148.5 237.88 86.88 47, 41, 35 -1500 80.32C-640D-305-168 210 120.03 120 148.5 237.88 86.88 47, 41, 35 -1500 80.32C-456D-305-168 210 120.03 120 148.5 237.88 86.88 47, 41, 35 -1500 80.32C-912D-427-144 180 120.03 120 148.5 237.88 86.88 47, 41, 35 -650 68.82C-912D-365-144 180 120.03 120 148.5 237.88 86.88 47, 41, 35 -650 68.82C-640D-365-144 180 120.03 120 148.5 238.88 89.88 47, 41, 35 -650 68.82C-640D-305-144 180 120.08 120 144.5 238.88 89.88 47, 41, 35 -520 68.45C-456D-305-144 180 120.08 120 144.5 238.88 89.88 47, 41, 35 -520 68.45C-640D-256-144 180 120.08 120 144.5 238.88 89.88 47, 41, 35 -400 68.45C-456D-256-144 180 120.08 120 144.5 238.88 89.88 47, 41, 35 -400 68.45C-320D-256-144 180 120.08 120 144.5 238.88 89.88 47, 41, 35 -400 68.45C-456D-365-120 152 120.03 120 148.5 238.88 89.88 47, 41, 35 570 58.12C-640D-305-120 155 111.09 111 133.5 213 75 42, 36, 30 -120 57.02C-456D-305-120 155 111.09 111 133.5 213 75 42, 36, 30 -120 57.02C-320D-256-120 155 111.07 111 132 211 75 42, 36, 30 55 57.05C-456D-256-120 155 111.07 111 132 211 75 42, 36, 30 55 57.05C-456D-213-120 155 111.07 111 132 211 75 42, 36, 30 0 57.05C-320D-213-120 155 111.07 111 132 211 75 42, 36, 30 0 57.05
Torque Factor
API Unit Designation

C-228D-213-120 155 111.07 111 132 211 75 42, 36, 30 0 57.05C-456D-265-100 129 111.07 111 132 211 75 42, 36, 30 550 47.48
C-320D-265-100 129 111.07 111 132 211 75 42, 36, 30 550 47.48C-320D-305-100 129 111.07 111 132 211 75 42, 36, 30 550 47.48C-228D-213-100 129 96.08 96 113 180 63 37, 32, 27 0 48.37C-228D-173-100 129 96.05 96 114 180 63 37, 32, 27 0 48.37C-160D-173-100 129 96.05 96 114 180 63 37, 32, 27 0 48.37C-320D-246-86 111 111.04 111 133 211 75 42, 36, 30 800 40.96C-228D-246-86 111 111.04 111 133 211 75 42, 36, 30 800 40.96C-320D-213-86 111 96.05 96 114 180 63 37, 32, 27 450 41.61C-228D-213-86 111 96.05 96 114 180 63 37, 32, 27 450 41.61C-160D-173-86 111 96.05 96 114 180 63 37, 32, 27 450 41.61C-114D-119-86 111 84.05 84 93.75 150.13 53.38 32, 27, 22 115 40.98C-320D-245-74 96 96.05 96 114 180 63 37, 32, 27 800 35.99C-228D-200-74 96 96.05 96 114 180 63 37, 32, 27 800 35.99C-160D-200-74 96 96.05 96 114 180 63 37, 32, 27 800 35.99C-228D-173-74 96 84.05 84 96 152.38 53.38 32, 27, 22 450 35.49C-160D-173-74 96 84.05 84 96 152.38 53.38 32, 27, 22 450 35.49C-160D-143-74 96 84.05 84 93.75 150.13 53.38 32, 27, 22 300 35.49C-114D-143-74 96 84.05 84 93.75 150.13 53.38 32, 27, 22 300 35.49C-160D-173-64 84 84.05 84 93.75 150.13 53.38 32, 27, 22 550 31.02C-114D-173-64 84 84.05 84 93.75 150.13 53.38 32, 27, 22 550 31.02C-160D-143-64 84 72.06 72 84 132 45 27, 22, 17 360 30.59C-114D-143-64 84 72.06 72 84 132 45 27, 22, 17 360 30.59C-80D-119-64 84 64 64 74.5 116 41 24, 20, 16 0 30.85C-160D-173-54 72 72.06 72 84 132 45 27, 22, 17 500 26.22C-114D-133-54 72 64 64 74.5 116 41 24, 20, 16 330 26.45

C-80D-133-54 72 64 64 74.5 116 41 24, 20, 16 330 26.45C-80D-119-54 72 64 64 74.5 116 41 24, 20, 16 330 26.45C-P57D-76-54 64 51 51 64 103 39 21, 16, 11 105 25.8C-P57D-89-54 64 51 51 64 103 39 21, 16, 11 105 25.8C-80D-133-48 64 64 64 74.5 116 41 24, 20, 16 440 23.51C-80D-109-48 64 56.05 56 65.63 105 37 21, 16, 11 320 23.3C-57D-109-48 64 56.05 56 65.63 105 37 21, 16, 11 320 23.3C-57D-95-48 64 56.05 56 65.63 105 37 21, 16, 11 320 23.3
C-P57D-109-48 57 51 51 64 103 39 21, 16, 11 180 22.98C-P57D-95-48 57 51 51 64 103 39 21, 16, 11 180 22.98C-40D-76-48 64 48.17 48 57.5 98.5 37 18, 14, 10 0 23.1
C-P40D-76-48 61 47 47 56 95 39 18, 14, 10 190 22.92C-P57D-89-42 51 51 51 64 103 39 21, 16, 11 280 20.56C-P57D-76-42 51 51 51 64 103 39 21, 16, 11 280 20.56C-P40D-89-42 53 47 47 56 95 39 18, 14, 10 280 19.92C-P40D-76-42 53 47 47 56 95 39 18, 14, 10 280 19.92C-57D-89-42 56 48.17 48 57.5 98.5 37 18, 14, 10 150 20.27C-57D-76-42 56 48.17 48 57.5 98.5 37 18, 14, 10 150 20.27C-40D-89-42 56 48.17 48 57.5 98.5 37 18, 14, 10 150 20.27C-40D-76-42 56 48.17 48 57.5 98.5 37 18, 14, 10 150 20.27C-40D-89-36 48 48.17 48 57.5 98.5 37 18, 14, 10 275 17.37
C-P40D-89-36 47 47 47 56 95 39 18, 14, 10 375 17.66C-25D-67-36 48 48.17 48 57.5 98.5 37 18, 14, 10 275 17.37C-25D-56-36 48 48.17 48 57.5 98.5 37 18, 14, 10 275 17.37C-25D-67-30 45 36.22 36 49.5 84.5 31 12, 8 150 14.53C-25D-53-30 45 36.22 36 49.5 84.5 31 12, 9 150 14.53

API Designation
C – 228D – 200 – 74.
The first field is the code for type of pumping unit. C = Conventional unitsA = Air-Balanced unitsB = Beam Counterbalance unitsM = Mark II units.
The second field is the code for peak torque rating in 1000 in.-lb. D stands for Double Reduction Gear Reducer.
The third field is the code for polished rod load rating in 100 lb.
The last field is the code for stroke length in inches.

Approximate Motion
Figure 1-7

If x denotes the distance of B below its top position C and is measured from the instant at which the crank arm and pitman arm are in the vertical position with the crank arm vertically upward, the law of cosine gives
( ) ( ) ( ) ( )( ) AOBOBOAOBOAAB cos2222 −+=
( ) ( ) txchcxchch ωcos2222 −+−−++=
i.e.,

( )[ ] ( )( ) 0cos12cos122 =−++−+− tchctchxx ωω
( ) ( )2222 coscos1 chtctchx −+±−+= ωω
( ) ( )2222 coscos1 chtctchx ++−−+= ωω
where ω is the angular velocity of the crank. The equation reduces to
so that
When ωt is zero, x is also zero, which means that the negative root sign must be taken. Therefore,

2
2
dtxda =
( )hcca += 12
max ω
Acceleration is
Carrying out the differentiation for acceleration, it is found that the maximum acceleration occurs when ωt is equal to zero (or an even multiple of π radians) and that this maximum value is
(1-1)

( )hcca −= 12
min ω
602 Nπω =
It also appears that the minimum value of acceleration is
(1-2)
If N is the number of pumping strokes per minute then
(1-3)(rad/sec)

⎟⎠⎞
⎜⎝⎛ +=
hccNa 1
2.91
2
max
⎟⎠⎞
⎜⎝⎛ +=
hcgcNa 1
3.2936
2
max
The maximum downward acceleration of point B(which occurs when the crank arm is vertically upward) is
or
(ft/sec2) (1-4)
(ft/sec2) (1-5)

⎟⎠⎞
⎜⎝⎛ −=
hcgcNa 1
3.2936
2
min
⎟⎠⎞
⎜⎝⎛ +=
hcgcN
dd
a 13.2936
2
2
1max (ft/sec2)
Likewise the minimum upward (amin) acceleration of point B (which occurs when the crank arm is vertically downward) is
It follows that in a conventional pumping unit the maximum upward acceleration of the horse’s head occurs at the bottom of the stroke (polished rod) and is equal to
(1-6)
(1-7)
(ft/sec2)

Sdcd
=1
22
122
1
2 Sdcd
=
241
2 Sd
cd=
where d1 and d2 are shown in Figure 1-5. But
where S is the polished rod stroke length. So if S is measured in inches, then
or
(1-8)

⎟⎠⎞
⎜⎝⎛ +=
hcgSNa 1
2.70471
2
max
MgSNa2.70471
2
max =
So substituting Eq (1-8) into Eq (1-7) yields
or we can write Eq (1-9) as
(ft/sec2)
(1-9)(ft/sec2)
(1-10)

hcM +=1
⎟⎠⎞
⎜⎝⎛ −=
hcgSNa 1
2.70471
2
min (ft/sec2)
where M is the machinery factor and is defined as
Similarly,
(1-11)
(1-12)

1.4.1 Maximum PRL
( ) ( )⎟⎟⎠
⎞⎜⎜⎝
⎛++
−=
2.704711441441444.62PRL
2
maxMSNDADAAA
DS rsrsrpf
γγ (1-13)
Equation (1-13) can be rewritten as
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛++−=
2.704711441441444.62
1444.62PRL
2
maxMSNDADADAS
DAS rsrsr
fp
fγγ
(1-14)

144rs
rDA
Wγ
=
DW
As
rr γ
144=
( ) ( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛++−=
2.704714.62
1444.62PRL
2
maxMSNWW
WS
DAS rr
s
rf
pf γ
If the weight of the rod string in air is
which can be solved for Ar which is
Substituting Eq (1-16) into Eq (1-14) yields
(1-17)
(1-15)
(1-16)

( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛++−=
2.704711.0
1444.62PRL
2
maxMSNWWW
DAS rrr
pf
⎟⎟⎠
⎞⎜⎜⎝
⎛++=
2.704719.0PRL
2
maxMSNWWW rrf
( )144
4.62 pff
DASW =where
and is called the fluid load (not to be confused with the actual fluid weight on the rod string).
(1-18)
The above equation is often further reduced by taking the fluid in the second term (the subtractive term) as an API 50° with Sf = 0.78. Thus, Eq (1-17) becomes (where γs= 490)
or

( ) rf WFW 1max 9.0PRL ++=
( )2.70471
12
1hcSN
F+
=
( )2.70471
12
1hcSN
F−
=
Thus, Eq (1-18) can be rewritten as
where for conventional units
and for air-balanced units
(1-21)
(1-19)
(1-20)

1.4.2 Minimum PRL
( ) 2min 4.62PRL FWWWS rrs
rf −+−=
γ
( ) rrr WFWFW 22min 9.09.0PRL −=−=
which, for API 50° oil, reduces to
(1-22)

( )2.70471
12
2hcSN
F−
=
( )2.70471
12
2hcSN
F+
=
where for the conventional units
and for air-balanced units
(1-24)
(1-23)

1.4.3 Counterweights
( )minmax21 PRL PRL +=C
( ) rrf WFFWWC 2121
21 9.0 −++= (1-25)
The idea counter-balance load C is the average PRL. Therefore,
Using Eqs (1-19) and (1-22) in the above we get

⎟⎟⎠
⎞⎜⎜⎝
⎛++=
hcSNWWC rf 2.70471
9.02
21
⎟⎟⎠
⎞⎜⎜⎝
⎛−+=
hcSNWWC rf 2.70471
9.02
21
or for conventional units
and for air-balanced units
(1-27)
(1-26)

2
1
dd
crWCC cs +=
where
Cs = structure unbalance, lbsWc = total weight of counterweights, lbsr = distance between the mass center of
counterweights and the crank shaft center, in.

1.4.4 Peak Torque and Speed Limit
( )[ ]1
229.0
ddWFCcT r−−=
( )[ ]rWFCST 221 9.0 −−=
Peak torque T is (see Figure 1.5)
Substituting Eq. (1-25) into Eq. (1-28) gives
(1-29)
(1-28)
or

( )[ ]rf WFFWST 2121
21
21 ++=
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
2.704712
2
41 r
fWSN
WST
or
(1-30)(in-lbs)
Torque factors and efficiency are used in practice:
[ ]93.0
)()( 2min1max21 TFPRLTFPRL
T+
=(1-31)

Torque factor is defined:
Load Rod PolishedCrankshaft the toExerted Torque
=TF
=1TF Maximum upstroke torque factor occurred when the crank is in the horizontal position
Maximum downstroke torque factor occurred when the crank is in the horizontal position
=2TF

Approximate Maximum Torque FactorConventional and Air Balance Units
Stroke (in.) TF1 (in.) TF2 (in.)16 8.5 8.524 13 1330 16 1636 19 1942 22 2248 26 2654 29 2964 34 3474 39 3986 45 45100 52 52120 63 63144 75 75168 87 87

Approximate Maximum Torque FactorMark II Units
Stroke (in.) TF1 (in.) TF2 (in.)
64 29 37
74 34 43
86 39 51
100 47 57
120 55 71
144 66 88
168 79 102

As given earlier the maximum value of the downward acceleration is equal to
( )2.70471
12
minmax/hcgSN
a±
= (1-32)
( )L
SN hc
≤±
2.7047112
(1-33)
Maximum Permissible Pumping Speed

( )hcSLN
m12.70471
limit =
( )hcS
Nm17.187
limit =
or
For L = 0.5
The minus sign is for conventional units and the plus sign for air-balanced units.
(1-34)
(1-35)

1.4.5 Tapered Rod Strings
Tapered rod strings can be identified by their numbers such as:
a. No. 88 is a non-tapered 8/8” or 1” diameter rod stringb. No. 76 is a tapered string with 7/8” diameter rod at the top,
then a 6/8” diameter rod at the bottom.c. No. 75 is a 3 way tapered string consisting of
7/8” diameter rod at top6/8” diameter rod at middle5/8” diameter rod at bottom
d. No. 107 is a 4 way tapered string consisting of10/8” (or 1 1/4”) diameter rod at top9/8” (or 1 1/8”) diameter rod below 10/8” diameter rod8/8” (or 1”) diameter rod below 9/8” diameter rod7/8” diameter rod below 8/8” diameter rod

There are two criteria used in the design of tapered rod strings:
1.Stress at the top rod of each rod size is the same throughout the string
2. Stress in the top rod of the smallest (deepest) set of rods should be the highest (~30,000 psi) and the stress progressively decreases in the top rods of the higher sets of rods.

The following geometry dimensions are for the pumping unit C – 320D – 213 – 86:
d1 = 96.05 in.d2 = 111 in.c = 37 in.c/h = 0.33
Example Problem 1-1:

If this unit is used with a 2 1/2” plunger and 7/8 in.rods to lift 25 °API gravity crude (formation volumefactor 1.2 rb/stb) at depth of 3,000 ft, answer thefollowing questions:
a) What is the maximum allowable pumping speed if L = 0.4 is used?
b) What is the expected maximum polished rod load?c) What is the expected peak torque?d) What is the desired counter-balance weight to be
placed at the maximum position on the crank?

The pumping unit C – 320D – 213 – 86 has a peak torque of gearbox rating of 320,000 in-lbs, a polished rod rating of 21,300 lbs, and a maximum polished rod stroke of 86 in.
(a)Based on the configuration for conventional unit shown in Figure 1-5(a) and Table 1-1, thepolished rod stroke length can be estimated as:
Solution:

in. 52.8505.96
111)37)(2(21
2 ===ddcS
( ) ( )33.01)52.85()4.0)(2.70471(
12.70471
−=
−=
hcS
LN
The maximum allowable pumping speed is:
= 22 SPM

( ) ( ) lbs 770,5144
)91.4)(000,3(4.62)9042.0(144
4.62 === pff
DASW
lbs 138,6144
)60.0)(000,3)(490(144
=== rsr
DAW
γ
(b) The maximum PRL can be calculated with Eq(12-17). The 25° API gravity has an Sf = 0.9042. The area of the 2 ½” plunger is Ap = 4.91 in.2 The area of the 7/8” rod is Ar = 0.60 in.2 Then

( ) ( ) 7940.02.70471
33.01)22)(52.85(2.70471
1 22
1 =+
=+
= hcSN
F
( ) 1max 4.62PRL FWWWSW rrs
rff ++−=
γ( ) )794.0)(138,6(138,6)490/()138,6(4.62)9042.0(770,5 ++−=
lbs 076,16=
Then the expected maximum PRL is:
< 21,300 lbs, OK

(c) The peak torque is calculated by Eq (1-30):
⎟⎟⎠
⎞⎜⎜⎝
⎛+=⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
2.70471)138,6()22)(52.85(2770,5 )52.58(
2.704712
2
41
2
41 r
fWSNWST
= 280,056 lb-in. < 320,000 lb-in. OK

( ) ( ) 4.02.70471
33.01)22)(52.85(2.70471
1 22
2 =−
=−
= hcSN
F
( ) 2min 4.62PRL FWWWS rrs
rf −+−=
γ( ) )4.0)(138,6(138,6
490138,64.62)9042.0( −+−=
Accurate calculation of counter-balance load requires the minimum PRL:
= 2,976 lbs

( ) ( ) lbs 526,92,976 076,61PRL PRL 21
minmax21 =+=+=C
160,10450)111()05.96(
)37()37(
=+cW
A product catalog of LUFKIN Industries indicates that the structure unbalance is 450 lbs and 4 No. 5ARO Counterweights placed at the maximum position (c in this case) on the crank will produce an effective counter-balance load of 10,160 lbs. That is,

221,11=cW 526,9=C
30.36)37()05.96)(221,11(
)111)(526,9(==r
which gives lbs. In order to generate the ideal counter-balance load of lbs, the counterweights should be place on the crank at
The computer program SuckerRodPumpingLoad.xlscan be used for quickly seeking solutions to similar problems. It is available from the publisher with this book. Solution is shown in Table 1-2.
in.

SuckerRodPumpingLoad.xlsDescription: This spreadsheet calculates the maximum allowable pumping speed, the maximum PRL, the minimum PRL, peak torque, and counterbalance load.Instruction: 1) Update parameter values in the Input section; and 2) view result in the Solution section.Input Data:
Pump setting depth (D): 3,000 ftPlunger diameter (dp): 2.5 in.Rod section 1, diameter (dr1): 1 in.
length (L1): 0 ftRod section 2, diameter (dr2): 0.875 in.
length (L2): 3,000 ftRod section 3, diameter (dr3): 0.75 in.
length (L3): 0 ftRod section 4, diameter (dr4): 0.5 in.
length (L4): 0 ftType of pumping unit (1 = conventional; -1 = Mark II or Air-balanced): 1Beam dimension 1 (d1) 96.05 in.Beam dimension 2 (d2) 111 in.

Crank length (c): 37 in.Crank to pitman ratio (c/h): 0.33Oil gravity (API): 25 oAPIMaximum allowable acceleration factor (L): 0.4
Solution:
= 85.52 in.
= 22 SPM
= 4.91 in.2
= 0.60 in.
= 5,770 lbs
= 6,138 lbs
1
22ddcS =
( )hcS
LN−
=1
2.70471
4
2p
p
dA
π=
( )144
4.62 pff
DASW =
4
2r
rdA π
=
144rs
rDA
Wγ
=

= 0.7940
= 16,076 lbs
= 280,056 lbs
= 0.40
= 2,976 lbs
= 9,526 lbs
( )2.70471
12
1hcSN
F±
=
( ) 1max 4.62PRL FWWWSW rrs
rff ++−=
γ
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
2.704712
2
41 r
fWSN
WST
( )2.70471
12
2hcSN
Fm
=
( ) 2min 4.62PRL FWWW
S rrs
rf −+−=
γ
( )minmax21 PRL PRL +=C

615.5)60)(24(
12144 o
vpp
BES
NA
q =
o
vpp
BENSA
q 1484.0=
Liquid flow rate delivered by the plunger pump can be expressed as
or
(stb/day)
1.5 Pump Deliverability and Power Requirements
(bbl/day)

1.5.1 Effective Plunger Stroke Length
The magnitude of the rod stretch is
EADW
lr
rfr =δ (1-36)
Tubing stretch can be expressed by a similar equation. That is
EADW
lt
tft =δ (1-37)

EADW
nlr
rro =δ
( )2.70471
12hcSN
n±
=
The magnitude of the rod stretch due to acceleration is called plunger over travel:
But the maximum acceleration term n can be written as
(ft) (1-38)

so that Eq (1-38) becomes
( )2.70471
12hc
r
rro
SNEADW
l±
=δ (ft) (1-39)
Let us restrict our discussion to conventional units. Then Eq (1-39) becomes
2.70471
2MSNEADW
lr
rro =δ (ft) (1-40)

rrsr DAW γ=
MSNDl ro22111093.1 −×=δ (in) (1-41)
Eq (1-40) can be rewritten to yield δlo in inches. Wr is
and γS = 490 lb/ft3 with E = 30 x 106 lb/m2
Eq (1-40) becomes

otrp lllSS δδδ +−−=
⎥⎦
⎤⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛+−=
r
r
trfp A
WMSNAA
WEDSS
2.704711112 2
Plunger stroke is approximated using the above expressions as
or
(in)
(1-42)

⎥⎥⎦
⎤
⎢⎢⎣
⎡
−+
−⎟⎟⎠
⎞⎜⎜⎝
⎛+−=
r
r
hchc
trfp A
LWAA
WEDSS
111112
hchc
−
+
11
If pumping is carried out at the maximum permissible speed limited by Eq (1-34), the plunger stroke becomes
For the air-balanced unit the term
is replaced by its reciprocal.
(in) (1-43)

1.5.2 Volumetric Efficiency
Guidelines are
a. Low viscosity oils (1 to 20 cps) can be pumped with a plunger to barrel fit of -0.001”.
b. High viscosity oils (7400 cps) will probably carry sand in suspension so a plunger to barrel fit or ~0.005” can be used.

An empirical formula has been developed that can be used to calculate the slippage rate, qs(bbl/day), through the annulus between the plunger and the barrel.
( ) ( )pb
pbpbps L
pd
ddddkq Δ+−
= 1.0
9.2
μ(1-44)

1.5.3 Power Requirements
The power required for lifting fluid is called hydraulic power. It is usually expressed in terms of net lift:
Nlh LqP γ61036.7 −×= (1-45)
and
l
tfN
pHL
γ433.0+=
(1-46)

SNWP rf71031.6 −×=
)( fhspm PPFP +=
The power required to overcome friction losses can be empirically estimated as
Thus the required prime mover power can be expressed as
(1-47)
(1-48)

A well is pumped off (fluid level is the pump depth) with a rod pump described in Example Problem 1-1. A 3” tubing string (3.5” OD, 2.995 ID) in the well is not anchored. Calculate (a) expected liquid production rate (use pump volumetric efficiency 0.8), and (b) required prime mover power (use safety factor 1.35).
Example Problem 1-2:

This problem can be quickly solved using the computer programSuckerRodPumpingFlowrate&Power.xls. Solution is shown in Table 1-3.
Solution:
Table 1-3: Solution given by SuckerRodPumpingFlowrate&Power.xls
SuckerRodPumpingFlowRate&Power.xls
Description: This spreadsheet calculates expected deliverability and required prime mover power for a given sucker rod pumping system.
Instruction: 1) Update parameter values in the Input section; and 2) view result in the Solution section.

Input Data:
Pump setting depth (D): 4,000 ftDepth to the liquid level in annulus (H): 4,000 ftFlowing tubing head pressure (ptf): 100 ftTubing outer diameter (dto): 3.5 in.
Tubing inner diameter (dti): 2.995 in.Tubing anchor (1 = yes; 0 = no): 0Plunger diameter (dp): 2.5 in.Rod section 1, diameter (dr1): 1 in.
length (L1): 0 ftRod section 2, diameter (dr2): 0.875 in.
length (L2): 0 ftRod section 3, diameter (dr3): 0.75 in.
length (L3): 4,000 ftRod section 4, diameter (dr4): 0.5 in.
length (L4): 0 ft

Type of pumping unit (1 = conventional; -1 = Mark II or Air-balanced): 1
Polished rod stroke length (S) 86 in.
Pumping speed (N) 22 spm
Crank to pitman ratio (c/h): 0.33
Oil gravity (API): 25 oAPI
Fluid formation volume factor (Bo): 1.2 rb/stb
Pump volumetric efficiency (Ev): 0.8
Safety factor to prime mover power (Fs): 1.35
Solution:
= 2.58 in.2
= 4.91 in.2
= 0.44 in.
4
2t
td
Aπ
=
4
2p
p
dA
π=
4
2r
rd
Aπ
=

= 7,693 lbs
= 6,013 lbs
= 1.33
= 70 in.
= 753 sbt/day
= 4,255 ft
= 25.58 hp
= 7.2 hp
= 44.2 hp
( )144
4.62 pff
DASW =
144rs
rDA
Wγ
=
⎥⎦
⎤⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛+−=
r
r
trfp A
WMSNAA
WEDSS
2.704711112 2
hcM ±= 1
o
vpp
BENSA
q 1484.0=
l
tfN
pHL
γ433.0+=
Nlh LqP γ61036.7 −×=
SNWP rf71031.6 −×=
)( fhspm PPFP +=

1.6 Procedure for Pumping Unit Selection
The following procedure can be used for selecting a pumping unit:
1) From the maximum anticipated fluid production (based on IPR) and estimated volumetric efficiency, calculate requiredpump displacement.
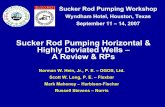
2) Based on well depth and pump displacement, determine API rating and stroke length of the pumping unit to be used. This can be done using either Figure 1-8 or Table 1-4.
3) Select tubing size, plunger size, rod sizes, and pumping speed from Table 1-4.
4) Calculate the fractional length of each section of the rod string.

5) Calculate the length of each section of the rod string to thenearest 25 ft.
6) Calculate the acceleration factor.7) Determine the effective plunger stroke length.8) Using the estimated volumetric efficiency, determine the
probable production rate and check it against the desired production rate.
9) Calculate the dead weight of the rod string.10) Calculate the fluid load.11) Determine peak polished rod load and check it
against the maximum beam load for the unit selected.

12) Calculate the maximum stress at the top of each rod size and check it against the maximum permissible working stress for the rods to be used.
13) Calculate the ideal counterbalance effect and check it against the counterbalance available for the unit selected.
14) From the manufacturer's literature, determine the position of the counterweight to obtain the ideal counterbalance effect.

15) On the assumption that the unit will be no more than five per cent out of counterbalance, calculate the peak torque on the gear reducer and check it against the API rating of the unit selected.
16) Calculate hydraulic horsepower, friction horsepower, and brake horsepower of the prime mover. Select the prime mover.
17) From the manufacturer's literature obtain the gear reduction ratio and unit sheave size for the unit selected, and the speed of the prime mover. From this determine the engine sheave size to obtain the desired pumping speed.

A well is to be put on a sucker rod pump. The proposed pump setting depth is 3,500 ft. The anticipated production rate is 600 bbl/day oil of 0.8 specific gravity against wellhead pressure 100 psig. It is assumed that working liquid level is low, and a sucker rod string having a working stress of 30,000 psi is to be used. Select surface and subsurface equipment for the installation. Use safety factor of 1.35 for prime mover power.
Example Problem 1-3:

Solution:
(1) Assuming volumetric efficiency of 0.8, the required pump displacement is (600)/(0.8) = 750 bbl/day.
(2) Based on well depth 3,500 ft and pump displacement 750 bbl/day, Figure 1-8 suggests API pump size 320 unit with 84 in. stroke, i.e., a pump is selected with the following designation:C - 320D – 213 - 86

(3) Table 1-4 (g) suggests:Tubing size: 3 in. O.D., 2.992 in. I.D.Plunger size: 2 ½ in.Rod size: 7/8 in.Pumping speed: 18 spm
(4) Table 1-1 gives d1 = 96.05 in., d2 = 111 in., c = 37 in. and h = 114 in., thus c/h = 0.3246. Spreadsheet program
SuckerRodPumpingFlowRate&Power.xls givesqo = 687 bbl/day > 600 bbl/day, OKPpm = 30.2 hp

(5) Spreadsheet program SuckerRodPumpingLoad.xlsgives
PRLmax = 16,121 lbsPRLmin = 4,533 lbsT = 247,755 lbs < 320,000 in.-lbs, OKC = 10,327 lbs
The cross-sectional area of the 7/8 in. rod is 0.60 in.2 Thus the maximum possible stress in the sucker rod is
σmax = (16,121)/(0.60) = 26,809 psi < 30,000 psi, OK
Therefore, the selected pumping unit and rod meet well load and volume requirements.

450)111()05.96(
)37()37(
+cW
075,14=cW 327,10=C
4.31)37()05.96)(076,14(
)111)(327,10(==r
lbs. In order to generate the ideal counter-balance load of lbs, the counterweights should be place on the crank at
in.
(6) If a LUFKIN Industries C - 320D – 213 – 86 unit is chosen, the structure unbalance is 450 lbs and 4 No. 5ARO Counterweights placed at the maximum position (c in this case) on the crank will produce an effective counter-balance load of 12,630 lbs. That is,
= 12,630 lbs
which gives

(7) The LUFKIN Industries C - 320D – 213 – 86 unit has a gear ratio of 30.12 and unit sheave sizes of 24 in., 30 in. and 44 in. are available. If a 24 in. unit sheave and a 750 rpm electric motor are chosen, the diameter of the motor sheave is
)750()24)(12.30)(18(
=ed = 17.3 in.

0
500
1,000
1,500
2,000
2,500
0 2,000 4,000 6,000 8,000 10,000 12,000
Pump Setting Depth (ft)
Pum
p D
ispl
acem
ent (
bbl/d
ay) A 40 34
B 57 42C 80 48D 114 54E 160 64F 228 74G 320 84H 640 144
Curve API Size Stroke
Figure 1-8: Sucker rod pumping unit selection chart (After Kelley and Willis, 1954)

Table 1-4: Design data for API sucker rod pumping units
(a) Size 40 Unit with 34-inch Stroke
Pump Depth (ft)Plunger Size
(in) Tubing Size (in)Rod Sizes
(in)Pumping Speed
(stroke/min)1000-1100 2 3/4 3 7/8 24-191100-1250 2 1/2 3 7/8 24-191250-1650 2 1/4 2 1/2 3/4 24-191650-1900 2 2 1/2 3/4 24-191900-2150 1 3/4 2 1/2 3/4 24-192150-3000 1 1/2 2 5/8-3/4 24-193000-3700 1 1/4 2 5/8-3/5 22-183700-4000 1 2 5/8-3/6 21-18
(b) Size 57 Unit with 42-inch Stroke
Pump Depth (ft) Plunger Size (in)Tubing
Size (in) Rod Sizes (in)Pumping Speed
(stroke/min)1150-1300 2 3/4 3 7/8 24-191300-1450 2 1/2 3 7/8 24-191450-1850 2 1/4 2 1/2 3/4 24-191850-2200 2 2 1/2 3/4 24-192200-2500 1 3/4 2 1/2 3/4 24-192500-3400 1 1/2 2 5/8-3/4 23-183400-4200 1 1/4 2 5/8-3/5 22-174200-5000 1 2 5/8-3/6 21-17

(c) Size 80 Unit with 48-inch Stroke
Pump Depth (ft)Plunger Size
(in) Tubing Size (in)Rod Sizes
(in)Pumping Speed
(stroke/min)
1400-1500 2 3/4 3 7/8 24-19
1550-1700 2 1/2 3 7/8 24-19
1700-2200 2 1/4 2 1/2 3/4 24-19
2200-2600 2 2 1/2 3/4 24-19
2600-3000 1 3/4 2 1/2 3/4 23-18
3000-4100 1 1/2 2 5/8-3/4 23-19
4100-5000 1 1/4 2 5/8-3/5 21-175000-6000 1 2 5/8-3/6 19-17
(d) Size 114 Unit with 54-inch Stroke
Pump Depth (ft)Plunger
Size (in) Tubing Size (in) Rod Sizes (in)Pumping Speed
(stroke/min)1700-1900 2 3/4 3 7/8 24-191900-2100 2 1/2 3 7/8 24-192100-2700 2 1/4 2 1/2 3/4 24-192700-3300 2 2 1/2 3/4 23-183300-3900 1 3/4 2 1/2 3/4 22-173900-5100 1 1/2 2 5/8-3/4 21-175100-6300 1 1/4 2 5/8-3/5 19-166300-7000 1 2 5/8-3/6 17-16

(e) Size 160 Unit with 64-inch Stroke
Pump Depth (ft) Plunger Size (in) Tubing Size (in)Rod Sizes
(in)Pumping Speed
(stroke/min)2000-2200 2 3/4 3 7/8 24-192200-2400 2 1/2 3 7/8 24-192400-3000 2 1/4 2 1/2 3/4-7/8 24-193000-3600 2 2 1/2 3/4-7/8 23-183600-4200 1 3/4 2 1/2 3/4-7/8 22-174200-5400 1 1/2 2 5/8-3/4-7/8 21-175400-6700 1 1/4 2 5/8-3/4-7/8 19-156700-7700 1 2 5/8-3/4-7/8 17-15
(f) Size 228 Unit with 74-inch Stroke
Pump Depth (ft) Plunger Size (in) Tubing Size (in)Rod Sizes
(in)Pumping Speed
(stroke/min)2400-2600 2 3/4 3 7/8 24-202600-3000 2 1/2 3 7/8 23-183000-3700 2 1/4 2 1/2 3/4-7/8 22-173700-4500 2 2 1/2 3/4-7/8 21-164500-5200 1 3/4 2 1/2 3/4-7/8 19-155200-6800 1 1/2 2 5/8-3/4-7/8 18-146800-8000 1 1/4 2 5/8-3/4-7/8 16-138000-8500 1 1/16 2 5/8-3/4-7/8 14-13

(g) Size 320 Unit with 84-inch Stroke
Pump Depth (ft) Plunger Size (in) Tubing Size (in)Rod Sizes
(in)Pumping Speed
(stroke/min)2800-3200 2 3/4 3 7/8 23-183200-3600 2 1/2 3 7/8 21-173600-4100 2 1/4 2 1/2 3/4-7/8-1 21-174100-4800 2 2 1/2 3/4-7/8-1 20-164800-5600 1 3/4 2 1/2 3/4-7/8-1 19-165600-6700 1 1/2 2 1/2 3/4-7/8-1 18-156700-8000 1 1/4 2 1/2 3/4-7/8-1 17-138000-9500 1 1/16 2 1/2 3/4-7/8-1 14-11
(h) Size 640 Unit with 144-inch Stroke
Pump Depth (ft) Plunger Size (in) Tubing Size (in) Rod Sizes (in)Pumping Speed
(stroke/min)3200-3500 2 3/4 3 7/8-1 18-143500-4000 2 1/2 3 7/8-1 17-134000-4700 2 1/4 2 1/2 3/4-7/8-1 16-134700-5700 2 2 1/2 3/4-7/8-1 15-125700-6600 1 3/4 2 1/2 3/4-7/8-1 14-126600-8000 1 1/2 2 1/2 3/4-7/8-1 14-118000-9600 1 1/4 2 1/2 3/4-7/8-1 13-109600-11000 1 1/16 2 1/2 3/4-7/8-1 12-10

1.7 Principles of Pump Performance Analysis
Figure 1-9: A sketch of pump dynagraph (From Nind, 1964)

Figure 1-10: Pump dynagraph cards: (a) ideal card, (b) gas compression on down stroke, (c) gas expansion on upstroke, (d) fluid pound, (e) vibration due to fluid pound, (f) gas lock (From Nind, 1964)

The surface dynamometer cards record the history of the variations in loading on the polished rod during a cycle. The cards have three principal uses:
a. To obtain information that can be used to determine load, torque and horsepower changes required of the pump equipment.
b. To improve pump operating conditions such as pump speed and stroke length.
c. To check well conditions after installation of equipment to prevent or diagnose various operating problems (like pounding etc).

Correct interpretation of surface dynamometer card leads to estimate of various parameter values.
• Maximum and minimum PRLs can be read directly from the surface card (with the use of instrument calibration). This data then allows for the determination of the torque,counter balance, and horsepower requirements for the surface unit.
• Rod stretch and contraction is shown on the surface dynamometer card. This phenomena is reflected in the surface unit dynamometer card and is shown in Figure 1-11 (a) for an ideal case.

Figure 1-11: Surface Dynamometer Card: (a) ideal card (stretch and contraction), (b) ideal card (acceleration), (c) 3 typical cards (From Nind, 1964)

• Acceleration forces cause the ideal card to rotate clockwise. The PRL is higher at the bottom of the stroke and lower at the top of the stroke. Thus, in Figure 1-11 (b), point A is at the bottom of the stroke.
• Rod vibration causes a serious complication in the interpretation of the surface card. This is result of the closing of the TV and the “pickup” of the fluid load by the rod string. This is of course the fluid pounding.

Figure 1-12: Strain-gage-type dynamometer chart

Figure 1-13: Surface to down hole cards derived from surface dynamometer card

Problems1-1. If the dimensions d1, d2 and c take the same values for both conventional unit (Class I lever system) and air-balanced unit (Class III lever system), how different will theirpolished rod strokes length be?
1-2. What are the advantages of the Lufkin Mark II and air-balanced units in comparison with conventional units?
1-3. Use your knowledge of kinematics to proof that for Class I lever systems,
(a) the polished rod will travel faster in down stroke than in upstroke if the distance between crankshaft and the center of Sampson post is less than dimension d1.
(b) the polished rod will travel faster in up stroke than indown stroke if the distance between crankshaft and the center of Sampson post is greater than dimension d1.

1-4. Derive a formula for calculating the effective diameter of a tapered rod string.
1-5. Derive formulae for calculating length fractions of equal-top-rod-stress tapered rod strings for (a) two-size rod strings, (b) three-sized rod strings, and (c) four-sized rod strings. Plot size fractions for each case as a function of plunger area.
1-6. A tapered rod string consists of sections of 5/8” and ½” rods and a 2” plunger. Use the formulae from problem 1-5 to calculate length fraction of each size of rod.
1-7. A tapered rod string consists of sections of ¾”, 5/8”and ½” rods and a 1 ¾” plunger. Use the formulae from problem 1-5 to calculate length fraction of each size of rod.

1-8. The following geometry dimensions are for the pumping unit C – 80D – 133 – 48:
d1 = 64 in.d2 = 64 in.c = 24 in.h = 74.5 in.
Can this unit be used with a 2” plunger and ¾”rods to lift 30 °API gravity crude (formation volume factor 1.25 rb/stb) at depth of 2,000 ft? If yes, what is the required counter balance load?

1-9. The following geometry dimensions are for the pumping unit C – 320D – 256 – 120:
d1 = 111.07 in.d2 = 155 in.c = 42 in.h = 132 in.
Can this unit be used with a 2 1/2” plunger and ¾”-7/8”-1”taperd rod string to lift 22 °API gravity crude (formation volume factor 1.22 rb/stb) at depth of 3,000 ft? If yes, what is the required counter balance load?

1-10. A well is pumped off with a rod pump described in Problem 12-8. A 2 ½” tubing string (2.875” OD, 2.441 ID) in the well is not anchored. Calculate (a) expected liquid production rate (use pump volumetric efficiency 0.80), and (b) required prime mover power (use safety factor 1.3).
1-11. A well is pumped with a rod pump described in Problem 1-9 to a liquid level of 2,800 ft. A 3” tubing string (3.5” OD, 2.995” ID) in the well is anchored. Calculate (a) expected liquid production rate (use pump volumetric efficiency 0.85), and (b) required prime mover power (use safety factor 1.4).

1-12. A well is to be put on a sucker rod pump. The proposed pump setting depth is 4,500 ft. The anticipated production rate is 500 bbl/day oil of 40 oAPI gravity against wellhead pressure 150 psig. It is assumed that working liquid level is low, and a sucker rod string having a working stress of 30,000 psi is to be used. Select surface and subsurface equipment for the installation. Use safety factor of 1.40 for prime mover power.
1-13. A well is to be put on a sucker rod pump. The proposed pump setting depth is 4,000 ft. The anticipated production rate is 550 bbl/day oil of 35 oAPI gravity against wellhead pressure 120 psig. It is assumed that working liquid level will be about 3,000 ft, and a sucker rod string having a working stress of 30,000 psi is to be used. Select surface and subsurface equipment for the installation. Use safety factor of 1.30 for prime mover power.