Gravimetry, Relativity, and the Global Navigation...
24
Gravimetry, Relativity, and the Global Navigation Satellite Systems — Second Lesson: Introduction to Differential Geometry — Albert Tarantola March 9, 2005 Abstract The basic structure one may introduce in a manifold is the ‘connection’, allowing the ‘parallel transport’ of vectors (of the linear tangent space). If there is no torsion, this connection is purely metric, and invokes the geodesic lines of the manifold. If there is torsion, the structure is more general, and invokes the ‘autoparallel lines’ of the manifold. With a connection, the sum of ori- ented autoparallel segments can be introduced, a notion that generalizes the sum of vectors in a linear space. While the default of commutativity of the sum is related to the torsion of the man- ifold, the default of associativity is related to the Riemann of the manifold. The analysis of the relations between these tensors leads to two basic relations, the Bianchi identities. These purely geometric relations open the way to the physics of space-time (general relativity) by simply pos- tulating proportionality between two geometric tensors (the Einstein and the Cartan tensor) and two material tensors (the stress-energy and the moment-stress-energy tensor), this leading to the Einstein-Cartan theory of gravitation, and its special case (spin neglected), the Einstein theory of gravitation. 1
Transcript of Gravimetry, Relativity, and the Global Navigation...

Gravimetry, Relativity,and the Global Navigation Satellite Systems
— Second Lesson: Introduction to Differential Geometry —
Albert Tarantola
March 9, 2005
Abstract
The basic structure one may introduce in a manifold is the ‘connection’, allowing the ‘paralleltransport’ of vectors (of the linear tangent space). If there is no torsion, this connection is purelymetric, and invokes the geodesic lines of the manifold. If there is torsion, the structure is moregeneral, and invokes the ‘autoparallel lines’ of the manifold. With a connection, the sum of ori-ented autoparallel segments can be introduced, a notion that generalizes the sum of vectors in alinear space. While the default of commutativity of the sum is related to the torsion of the man-ifold, the default of associativity is related to the Riemann of the manifold. The analysis of therelations between these tensors leads to two basic relations, the Bianchi identities. These purelygeometric relations open the way to the physics of space-time (general relativity) by simply pos-tulating proportionality between two geometric tensors (the Einstein and the Cartan tensor) andtwo material tensors (the stress-energy and the moment-stress-energy tensor), this leading to theEinstein-Cartan theory of gravitation, and its special case (spin neglected), the Einstein theory ofgravitation.
1

Contents
1 Preliminary Comment 3
2 Oriented Autoparallel Segments on a Manifold 32.1 Manifold . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.3 Oriented Autoparallel Segments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.4 Vector Tangent to an Autoparallel Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.5 Parallel Transport of a Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.6 Association Between Tangent Vectors and Oriented Segments . . . . . . . . . . . . . . 52.7 Transport of Oriented Autoparallel Segments . . . . . . . . . . . . . . . . . . . . . . . . 6
3 Sum of Oriented Autoparallel Segments 63.1 Definition and Basic Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2 Linear tangent Space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.3 Series Representations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.4 Commutator and Associator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.5 Torsion and Anassociativity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.6 Bianchi Identities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.7 Contracted Bianchi Identities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4 Gravitation 14
5 References 15
A Operations on a Manifold 16A.1 Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16A.2 Autoparallels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16A.3 Parallel Transport of a Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17A.4 Autoparallel Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18A.5 Geometric Sum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
B Bianchi Identities 21B.1 Connection, Riemann, Torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21B.2 Basic Symmetries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21B.3 The Bianchi Identities (I) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22B.4 The Bianchi Identities (II) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
C Total Riemann Versus Metric Curvature 22C.1 Connection, Metric Connection and Torsion . . . . . . . . . . . . . . . . . . . . . . . . . 22C.2 The Metric Curvature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23C.3 Totally Antisymmetric Torsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2

1 Preliminary Comment
The goal of this note is not really an introduction to the basic theory of differential geometry, but onlyto arrive to the ‘contracted Bianchi identities’ (section 3.7), as they open the way to gravitation theory(section 4).
The approach followed here is far from conventional: the basic notions (torsion, Riemann, etc.)are introduced via the definition of a particular operation, the sum of oriented autoparallel segments.
Although the usual gravitation theory ignores the possibility of torsion, I choose here to try toopen the mind of the students for the more general case of not only the mass density content ofmatter may be taken into account, but also the spin density. This is why I develop the differentialgeometry in a manifold having both, curvature and torsion.
This text is extracted (using the ‘copy and paste’ functions of my LATEX installation) from a manus-cript in preparation. Should the students wish to have a look at this manuscript, its current versionis at the (confidential) address http://www.ccr.jussieu.fr/tarantola/Springer.
In the pages that follow, I seek generality and maximum simplicity, and to obtain this, the lan-guage I use not always has the rigor that any mathematician would like. Perhaps future versions ofthis text will gain in both, readability, and rigor.
2 Oriented Autoparallel Segments on a Manifold
2.1 Manifold
An n-dimensional manifold is a space of elements, called ‘points’, that accepts in a finite neighborhoodof each of its points an n-dimensional system of continuous coordinates. Grossly speaking, an n-dimensional manifold is a space that, locally, ‘looks’ like <n . We are here interested in the classof smooth manifolds that may or may not be metric, but that have a prescription for the paralleltransport of vectors: given a vector at a point (a vector belonging to the linear space tangent to themanifold at the given point), and given a line on the manifold, it is assumed that one is able totransport the vector along the line ‘keeping the vector always parallel to itself’. Intuitively speakingthis corresponds to the assumption that there is an ‘inertial navigation system’ on the manifold,analog to that used in airplanes to keep fixed directions while navigating. The prescription for this‘parallel transport’ is not necessarily the one that could be defined using an eventual metric (and‘geodesic’ techniques), as the considered manifolds may have ‘torsion’. In such a manifold, there is afamily of privileged lines, the ‘autoparallels’, that are obtained when constantly following a directiondefined by the ‘inertial navigation system’.
If the manifold is, in addition, a metric manifold, then there is a second family of privileged lines,the ‘geodesics’, that correspond to the minimum length path between any two of its points. It is wellknown1 that the two types of lines coincide (the geodesics are autoparallels and vice-versa) when thetorsion is totally antisymmetric Ti jk = - Tjik = - Tik j .
2.2 Connection
Consider the simple situation where some (arbitrary) coordinates x ≡ {xi} have been defined overthe manifold. At a given point x0 consider the coordinate lines passing through x0 . If x is a pointon any of the coordinate lines, let us denote as γ(x) the coordinate line segment going from x0 tox . The natural basis (of the local tangent space) associated to the given coordinates consists of the
1See a demonstration in appendix C.3.
3

n vectors {e1(x0), . . . , en(x0)} that can formally be denoted as ei(x0) = ∂γ
∂xi (x0) , or, dropping theindex 0 ,
ei(x) =∂γ
∂xi (x) . (1)
So, there is a natural basis at every point of the manifold. As it is assumed that there exists a paralleltransport on the manifold, the basis {ei(x)} can be transported from a point xi to a point xi + δxi
to give a new basis, that we can denote {ei( x + δx ‖ x )} (and that, in general, is different from thelocal basis {ei(x + δx)} at point x + δx ). The connection is defined as the set of coefficients Γ k
i j (thatare not, in general, the components of a tensor) appearing in the development
e j( x + δx ‖ x ) = e j(x) + Γ ki j(x) ek(x) δxi + . . . . (2)
For this first order expression, we don’t need to be specific about the path followed for the paralleltransport. For higher order expressions, the path followed matters (see for instance equation (70),corresponding to a transport along an autoparallel line).
In all the rest of this book, a manifold where a connection is defined shall be named a connectionmanifold.
2.3 Oriented Autoparallel Segments
The notion of autoparallel curve is mathematically introduced in appendix A.2. It is enough for ourpresent needs to know the main result demonstrated there:
Property 1 A line xi = xi(λ) is autoparallel if at every point along the line,
d2xi
dλ2 + γijk
dx j
dλ
dxk
dλ= 0 , (3)
where γijk is the symmetric part of the connection,
γijk = 1
2 (Γ ijk + Γ i
k j) . (4)
If there exists a parameter λ with respect to which a curve is autoparallel, then any other parameterµ = α λ + β (where α and β are two constants) satisfies also the condition (3). Any such parameterassociated to an autoparallel curve is called an affine parameter.
2.4 Vector Tangent to an Autoparallel Line
Let be xi = xi(λ) the equation of an autoparallel line with affine parameter λ . The affine tangentvector v (associated to the autoparallel line and to the affine parameter λ ) is defined, at any pointalong the line, by
vi(λ) =dxi
dλ(λ) . (5)
It is an element of the linear space tangent to the manifold at the considered point. This tangent vectordepends on the particular affine parameter being used: when changing from the affine parameter λ
to another affine parameter µ = α λ +β , and defining vi = dxi/dµ , one easily arrives to the relationvi = α vi .
4

2.5 Parallel Transport of a Vector
Let us suppose that a vector w is transported, parallel to itself, along this autoparallel line, and de-note wi(λ) the components of the vector in the local natural basis. As demonstrated in appendix A.3,one has the
Property 2 The equation defining the parallel transport of a vector w along the autoparallel line of affinetangent vector v is
dwi
dλ+ Γ i
jk v j wk = 0 . (6)
Given an autoparallel line and a vector at any of its points, this equation can be used to obtain thetransported vector at any other point along the autoparallel line.
2.6 Association Between Tangent Vectors and Oriented Segments
Consider again an autoparallel line xi = xi(λ) defined in terms of an affine parameter λ . At somepoint of parameter λ0 along the curve, we can introduce the affine tangent vector defined in equa-tion (5), vi(λ0) = dxi
dλ(λ0) , that belongs to the linear space tangent to the manifold at point λ0 . As
already mentioned, changing the affine parameter changes the affine tangent vector.We could define an association between arbitrary tangent vectors and autoparallel segments char-
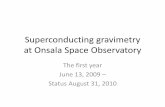
acterized using an arbitrary affine parameter2, but it is much simpler to pass through the introductionof a ‘canonical’ affine parameter. Given an arbitrary vector V at a point of a manifold, and the au-toparallel line that is tangent to V (at the given point), we can select among all the affine parametersthat characterize the autoparallel line, one parameter, say λ , giving Vi = dxi/dλ (i.e., such that theaffine tangent vector v with respect to the parameter λ equals the given vector V ). Then, by def-inition, to the vector V is associated the oriented autoparallel segment that starts at point λ0 (thetangency point) and ends at point λ0 + 1 , i.e., the segment whose ‘affine length’ (with respect to thecanonical affine parameter λ being used) equals one. This is represented in figure 1.
Figure 1: In a connection manifold (that may or may not be met-ric), the association between vectors (of the linear tangent space)and oriented autoparallel segments in the manifold is made usinga canonical affine parameter.
= 0
= 0
+ 1= 0
= 0 + 1
V i =
dxi
d
k V i = W
i = ddxi
− 0 = 1−k
− 0( )
Let O be the point where the vector V and the autoparallel line are tangent, let P be the pointalong the line that the procedure just described associates to the given vector V , and let Q be thepoint associated to the vector W = k V . It is easy to verify (see figure 1) that for any affine parameter
2To any point of parameter λ along the autoparallel line we can associate the vector (also belonging to the linear spacetangent to the manifold at λ0 ) V(λ; λ0) = λ−λ0
1−λ0v(λ0) . One has V(λ0 ; λ0) = 0 , V(1; λ0) = v(λ0) , and the more λ is
larger than λ0 , the ‘longer’ is V(λ; λ0) .
5

considered along the line, the increase in the value of the affine parameter when passing from O topoint Q is k times the increase when passing from O to P .
The association so defined between tangent vectors and oriented autoparallel segments is con-sistent with the standard association between tangent vectors and oriented geodesic segments inmetric manifolds without torsion, where the autoparallel lines are the geodesics. The tangent to ageodesic xi = xi(s) , parameterized by a metric coordinate s , is defined as vi = dxi/ds , and one hasgi j vi v j = gi j (dxi/ds) (dx j/ds) = ds2/ds2 = 1 , this showing that the vector tangent to a geodesic hasunit length.
2.7 Transport of Oriented Autoparallel Segments
Consider now two oriented autoparallel segments, u and v with common origin, as suggested infigure 2. To the segment v we can associate a vector of the tangent space, as we have just seen. Thisvector can be transported along u (using equation 6) until its tip. The vector there obtained can thenbe associated to another oriented autoparallel segment, giving the v′ suggested in the figure. So, ona manifold with a parallel transport defined, one can transport not only vectors, but also orientedautoparallel segments.
Figure 2: Transport of an oriented autoparallel segment along another one. vv
u
'
3 Sum of Oriented Autoparallel Segments
3.1 Definition and Basic Properties
In a sufficiently smooth manifold, take a particular point O as origin, and consider the set of orientedautoparallel segments, having O as origin, and belonging to some finite neighborhood of the origin3.We shall call these objects autovectors. Given two such autovectors u and v , define the geometricsum (or geosum) w = v⊕ u by the geometric construction exposed in figure 3, and given two suchautovectors u and v , define the geometric difference (or geodifference) w = v u by the geometricconstruction exposed in figure 4.
As the definition of the geodifference is essentially, the ‘deconstruction’ of the geosum ⊕ , it isclear that the equation w = v⊕ u can be solved for v :
w = v⊕ u ⇐⇒ v = w u . (7)
It is obvious that there exists a neutral element 0 for the sum of autovectors: a segment reducedto a point. For we have, for any ‘autovector’ v ,
0⊕ v = v⊕ 0 = v , (8)
The opposite of an ‘autovector’ a is the ‘autovector’ -a , that is along the same autoparallel line,but pointing towards the opposite direction (see figure 5). The associated tangent vectors are also
3On an arbitrary manifold, the geodesics leaving a point may form caustics (where the geodesics cross each other). Theconsidered neighborhood of the origin must be small enough as to avoid caustics.
6

Definition of w = v ⊕ u ( v = w ⊖ u )
v
u
v
u
wv
uv' v'
Figure 3: Definition of the geometric sum of two autovectors at a point O of a manifold with aparallel transport: the sum w = v⊕ u is defined through the parallel transport of v along u . Here,v′ denotes the oriented autoparallel segment obtained by the parallel transport of the autoparallelsegment defining v along u (as v′ does not begin at the origin, it is not an ‘autovector’). We maysay, using a common terminology that the oriented autoparallel segments v and v′ are ‘equipollent’.The ‘autovector’ w = v⊕ u is, by definition, the arc of autoparallel (unique in a sufficiently smallneighborhood of the origin) connecting the origin O to the tip of v′ .
Definition of v = w ⊖ u ( w = v ⊕ u )
v' v'
www
uuu
v
Figure 4: The geometric difference v = w u of two autovectors is defined by the condition v =w u ⇔ w = v⊕ u . It can be obtained through the parallel transport to the origin (along u ) of theoriented autoparallel segment v′ that “ goes from the tip of u to the tip of w ”. In fact, the transportperformed to obtain the difference v = w u is the reverse of the transport performed to obtainthe sum w = v⊕ u (figure 3), and this explains why in the expression w = v⊕ u one can alwayssolve for v , to obtain v = w u . This contrasts with the problem of solving w = v⊕ u for u , thatrequires a different geometrical construction, whose result cannot be directly expressed in terms ofthe two operations ⊕ and (see the example in figure 6).
Figure 5: The opposite -v of an ‘autovector’ v is the ‘autovector’ oppositeto v , and with the same absolute variation of affine parameter as v (or thesame length if the manifold is metric).
v-v
7

−
wu
v'
v-v
w'-u
w = v ⊕ u
v ≠ w ⊕ (-u)u ≠ (-v) ⊕ w
v = w ⊖ u
Figure 6: Over the set of oriented autoparallel segments at a given origin of a manifold we have theequivalence w = v⊕ u ⇔ v = w u (as the two expressions correspond to the same geometricconstruction). But, in general, v 6= w⊕(-u) and u 6= (-v)⊕w . For the autovector w⊕(-u) isindeed to be obtained by transporting w along -u . There is no reason for the tip of the orientedautoparallel segment w′ thus obtained to coincide with the tip of the autovector v . Therefore,w = v⊕ u 6⇔ v = w⊕(-u) . Also, the autovector (-v)⊕w is to be obtained, by definition, bytransporting -v along w , and one does not obtain an oriented autoparallel segment that is equaland opposite to v′ (as there is no reason for the angles ϕ and λ to be identical). Therefore, w =v⊕ u 6⇔ u = (-v)⊕w . It is only when the autovector space is associative that all the equivalenceshold.
mutually opposite (in the usual sense). Then, clearly,
(-v)⊕ v = v⊕ (-v) = 0 (9)
Given an ‘autovector’ v and a real number λ , the sense to be given to λ v (for any λ ∈ [-1, 1] )is obvious, and requires no special discussion. It is then clear that for any ‘autovector’ v and anyscalars λ and µ inside some finite interval around zero,
(λ + µ) v = λ v⊕µ v , (10)
as this corresponds to translating an autoparallel line along itself.The reader may easily construct the geometric representation that corresponds to the two prop-
erties, valid in general,
(w⊕ v) v = w ; (w v)⊕ v = w . (11)
We have seen that the equation w = v⊕ u can be solved for v , to give v = w u . A completelydifferent situation appears when trying to solve w = v⊕ u in terms of u . Finding the u such thatby parallel transport of v along it one obtains w correspond to an ‘inverse problem’ that has noexplicit geometric solution. It can be solved, for instance using some iterative algorithm, essentiallya trial and (correction of) error method.
Note that given w = v⊕ u , in general, u 6= (-v)⊕w (see figure 6), the equality holding only inthe special situation where the autovector operation is, in fact, a group operation (i.e., it is associa-tive). This is obviously not the case in an arbitrary manifold.
Not only the associative property does not hold on an arbitrary manifold, but even simpler prop-erties are not verified. For instance, let us introduce the following definition: An autovector space isoppositive is for any two autovectors u and v , one has w v = -(vw) . Figure 7 shows that thesurface of the sphere, using the parallel transport defined by the metric, is not oppositive. Also notethat, in general,
w v 6= w⊕(-v) . (12)
8

Figure 7: This figure illustrates the (lack of) oppositivity propertyfor the autovectors on an arbitrary homogeneous manifold (thefigure suggests a sphere). The oppositivity property here meansthat the two following constructions are equivalent. (i) By defini-tion of the operation , the oriented geodesic segment w vis obtained by considering first the oriented geodesic segment(w v)′ , that arrives to the tip of w coming from the tip of vand, then, transporting it to the origin, along v , to get w v .(ii) Similarly, the oriented geodesic segment vw is obtainedby considering first the oriented geodesic segment (vw)′ , thatarrives to the tip of v coming from the tip of w and, then, trans-porting it to the origin, along w , to get vw . We see that, onthe surface of the sphere, in general, w v 6= -(vw) .
A
AB
C
BCw
v
'(v ⊖ w)
'(w ⊖ v)
v ⊖ w
w ⊖ v
3.2 Linear tangent Space
One intuitively expects that a sufficiently smooth manifold accepts a linear tangent space at eachof its points. The autovectors we have introduced all have their origin at a given point. The lineartangent space at this origin point can be introduced via the relation
limλ→0
1λ(λ w⊕ λ v) = w + v , (13)
linking the geosum to the sum (and difference) in the tangent linear space (through the considerationof the limit of vanishingly small autovectors).
3.3 Series Representations
We can now seek to write the following series expansion,
(w⊕ v)i = ai + bij w j + ci
j v j + dijk w j wk + ei
jk w j vk + f ijk v j vk
+ pijk` w j wk w` + qi
jk` w j wk v` + rijk` w j vk v`
+ sijk` v j vk v` + . . . ,
(14)
expressing the geometric sum (on the manifold) in terms of the sum in the linear tangent space. Weshall later see that this series relates to a well-known series arising in the study of Lie groups, calledthe BCH series. Remember that the operation ⊕ is, in general, not associative.
Without loss of generality, the tensors a, b, c . . . appearing in the series (14) can be assumed tohave the symmetries of the term in which they appear4. Introducing into the series the two propertiesw⊕ 0 = w and 0⊕ v = v , and using the symmetries just assumed, one immediately obtains ai = 0 ,bi
j = cij = δi
j , dijk = f i
jk = 0 , pijk` = si
jk` = 0 , etc., so the series (14) simplifies into
(w⊕ v)i = wi + vi + eijk w j vk + qi
jk` w j wk v` + rijk` w j vk v` + . . . , (15)
where the qijk` and ri
jk` have the symmetries
qijk` = qi
k j` ; rijk` = ri
j`k . (16)
4I.e., dijk = di
k j , f ijk = f i
k j , qijk` = qi
k j` , rijk` = ri
j`k , pijk` = pi
k j` = pij`k and si
jk` = sik j` = si
j`k .
9

Finally, the property (λ + µ) v = λ v⊕µ v imposes that the circular sums of the coefficients mustvanish5, ∮
( jk) eijk = 0 ;
∮( jk`) qi
jk` =∮
( jk`) rijk` = 0 . (17)
We see, in particular, that eki j is necessarily antisymmetric:
eki j = - ek
ji . (18)
We can now search for the series expressing the difference operation, . Starting from the prop-erty (w v)⊕ v = w , developing the o-sum through the series (15), writing a generic series for the operation, and using the property ww = 0 , one arrives at a series whose terms up to the thirdorder are
(w v)i = wi − vi − eijk w j vk − qi
jk` w j wk v` − uijk` w j vk v` + . . . , (19)
where the coefficients uijk` are given by
uijk` = ri
jk` − (qijk` + qi
j`k)− 12 (ei
sk esj` + ei
s` esjk) , (20)
and, as easily verified, satisfy∮
( jk`) uijk` = 0 .
3.4 Commutator and Associator
In the theory of ‘Lie algebras’, the ‘commutator’ plays a central role. Here, it is introduced using the o-sum and the o-difference, and, in addition to the ‘commutator’ we need to introduce the ‘associator’.Let us see how this can be made.
Definition 1 The finite commutation of two autovectors v and w , denoted {w , v } is defined as
{w , v } ≡ (w⊕ v) (v⊕w) . (21)
Definition 2 The finite association, denoted {w , v , u } is defined as
{w , v , u } ≡ ( w⊕ (v⊕ u) ) ( (w⊕ v)⊕ u ) . (22)
Clearly, the finite association vanishes if the autovector space is associative. The finite commutationvanishes if the autovector space is commutative.
It is easy to see that when writing the series expansion of the finite commutation of two elements,its first term is a second order term. Similarly, when writing the series expansion of the finite associ-ation of three elements, its first term is a third order term. This justifies the following two definitions.
Definition 3 The commutator, denoted [ w , v ] , is the lowest order term in the series expansion of the finitecommutation {w , v } defined in equation (21):
{w , v } ≡ [ w , v ] + O(3) . (23)
5Explicitly, eijk + ei
k j = 0 , and qijk` + qi
k` j + qi` jk = ri
jk` + rik` j + ri
` jk = 0 .
10

Definition 4 The associator, denoted [ w , v , u ] , is the lowest order term in the series expansion of thefinite association {w , v , u } defined in equation (22):
{w , v , u } ≡ [ w , v , u ] + O(4) . (24)
Therefore, one has the series expansions
(w⊕ v) (v⊕w) = [ w , v ] + . . .( w⊕(v⊕ u) ) ( (w⊕ v)⊕ u ) = [ w , v , u ] + . . . .
(25)
When an autovector space is associative, it is a local Lie group. Then, obviously, the associator[ w , v , u ] vanishes. The commutator [ w , u ] is then identical to that usually introduced in Liegroup theory.
It can be shown that the commutator is antisymmetric, i.e., for any autovectors v and w , one has
[w , v] = - [v , w] . (26)
3.5 Torsion and Anassociativity
Definition 5 The torsion tensor T , with components Tijk , is defined through [w, v] = T(w, v) , or, more
explicitly,
[w, v]i = Tijk w j vk . (27)
Definition 6 The anassociativity tensor A , with components Aijk` , is defined through the expression
[w, v, u] = 12 A(w, v, u) , or, more explicitly,
[w, v, u]i = 12 Ai
jk` w j vk u` . (28)
Therefore, using equations (23)–(24) and (21)–(22), we arrive at the property[(w⊕ v) (v⊕w)
]i = Tijk w j vk + . . .[
( w⊕(v⊕ u) ) ( (w⊕ v)⊕ u )]i = 1
2 Aijk` w j vk u` + . . . .
(29)
Loosely speaking, the tensors T and A give respectively a ‘measure’ of the default of commuta-tivity and of the default of associativity of the autovector operation ⊕ .
We shall see on a manifold with constant torsion, the anassociativity tensor is identical to the Rie-mann tensor of the manifold (this correspondence explaining the factor 1/2 in the definition of A ).
From equation (26) follows that the torsion is antisymmetric in its two lower indices:
Tijk = -Ti
k j . (30)
We can now come back to the two developments (equations (15) and (19))
(w⊕ v)i = wi + vi + eijk w j vk + qi
jk` w j wk v` + rijk` w j vk v` + . . .
(w v)i = wi − vi − eijk w j vk − qi
jk` w j wk v` − uijk` w j vk v` + . . . ,
(31)
11

with the uijk` given by expression (20). Using the definition of torsion and of anassociativity (27)–
(28), it is possible to see that one can express the coefficients of these two series as
eijk = 1
2 Tijk
qijk` = - 1
12∮
( jk)( Aijk` − Ai
k` j − 12 Ti
js Tsk` )
rijk` = 1
12∮
(k`)( Aijk` − Ai
` jk + 12 Ti
ks Ts` j )
uijk` = 1
12∮
(k`)( Aijk` − Ai
k` j − 12 Ti
ks Ts` j ) ,
(32)
this expressing terms up to order three of the o-sum and o-difference in terms on the torsion and theanassociativity. A direct check shows that these expressions satisfy the necessary symmetry condi-tions
∮( jk`) qi
jk` =∮
( jk`) rijk` =
∮( jk`) ui
jk` = 0 .Reciprocally, it is not difficult to see that one can write
Tijk = 2 ei
jk12 Ai
jk` = eijs es
k` + ei`s es
jk − 2 qijk` + 2 ri
jk` .(33)
Remember here the generic expression (15) for an o-sum.
(w⊕ v)i = wi + vi + eijk w j vk + qi
jk` w j wk v` + rijk` w j vk v` + . . . . (34)
With the autoparallel characterized by expression (3) and the parallel transport by expression (6) itis just a matter of careful series expansion to obtain the expressions of ei
jk , qijk` and ri
jk` for thegeosum defined over the oriented segments of a manifold. The computation is done in appendix A.5and one obtains, in a system of coordinates that is autoparallel at the origin6,
eijk = Γ i
jk ; qijk` = − 1
2 ∂`γijk ; ri
jk` = − 14
∮(k`)( ∂k Γ i
` j − Γ iks Γ s
` j ) . (35)
The reader may verify (using, in particular, the Bianchi identities mentioned below) that these coeffi-cients ei
jk , qijk` and ri
jk` , satisfy the symmetries expressed in equation (17).The expressions for the torsion and the anassociativity can then be obtained using equations (33).
After some easy rearrangements, this gives
Tijk = Γ i
jk − Γ ik j ; Ai
jk` = Rijk` +∇`Ti
jk , (36)
whereRi
jk` = ∂`Γik j − ∂kΓ
i` j + Γ i
`s Γ sk j − Γ i
ks Γ s` j (37)
is the Riemann tensor of the manifold7, and where ∇`Tijk is the covariant derivative of the torsion:
∇`Tijk = ∂`Ti
jk + Γ i`s Ts
jk − Γ s` j Ti
sk − Γ s`k Ti
js . (38)
Let us state the two results in equation (36) as two explicit theorems.
6See appendix A.4 for details. At the origin of an autoparallel system of coordinates the symmetric part of the connectionvanishes (but not its derivatives).
7There are many conventions for the definition of the Riemann tensor in the literature. When the connection is symmet-ric, this definition corresponds to that of Weinberg (1972).
12

Property 3 When considering the autovector space formed by the oriented autoparallel segments (of commonorigin) on a manifold, the torsion is (twice) the antisymmetric part of the connection:
Tki j = Γ k
i j − Γ kji . (39)
This result was anticipated when we already called torsion the tensor defined in equation (27).
Property 4 When considering the autovector space formed by the oriented autoparallel segments (of commonorigin) on a manifold, the anassociativity tensor A is given by
A`i jk = R`
i jk +∇kT`i j , (40)
where R`i jk is the Riemann tensor of the manifold ( equation (37) ), and where ∇kT`
i j is the gradient (covariantderivative) of the torsion of the manifold ( equation (38) ).
The equations (35) are obviously not covariant expressions (they are written at the origin of anautoparallel system of coordinates). But in equations (32) we have obtained the expression of ei
jk ,qi
jk` and r jk` in terms of the torsion tensor and the anassociativity tensor. Therefore, equations (32)give the covariant expressions of these three tensors.
3.6 Bianchi Identities
A direct computation shows that we have the following
Property 5 First Bianchi identity. At any point8 of a differentiable manifold, the anassociativity and thetorsion are linked through ∮
( jk`) Aijk` =
∮( jk`) Ti
js Tsk` . (41)
This is an important identity. When expressing the anassociativity in terms of the Riemann and thetorsion (equation (40)), this is the well-known ‘first Bianchi identity’ of a manifold.
The second Bianchi identity is obtained by taking the covariant derivative of the Riemann (asexpressed in equation (37)) and making a circular sum:
Property 6 Second Bianchi identity. At any point of a differentiable manifold, the Riemann and the torsionare linked through ∮
( jk`)∇ jRimk` =
∮( jk`) Ri
m js Tsk` . (42)
Contrary to what happens with the first identity, no simplification occurs when using the anassocia-tivity instead of the Riemann.
8As any point of a differentiable manifold can be taken as origin of an autovector space.
13

3.7 Contracted Bianchi Identities
Introducing the Ricci tensor Ri j and the scalar curvature R through
Ri j = Rsjis ; R = gi j Ri j , (43)
and the contracted torsionTi = Tsi
s , (44)
it follows from the Bianchi identities (41)–(42) the following two equations, named the contractedBianchi identities:
∇sEis = Ts
`r ( 12 Rr`
si + δi` Rs
r) ; ∇i Cijk = (R jk − Rk j) + Ts Ts
jk , (45)
where the Einstein tensor Ei j and the Cartan tensor Cijk are defined as
Ei j = Ri j − 12 gi j R ; Ck
i j = Tki j + Ti δ j
k − Tj δik . (46)
Should the torsion be zero, then the contracted Bianchi identities degenerate into
∇kE jk = 0 ; Ri j = R ji . (47)
The Ricci tensor is symmetric and the Einstein tensor satisfies a ‘conservation equation’.
4 Gravitation
In General Relativity, the space-time is a four-dimensional manifold, endowed with a metric thatis locally Minkowskian. As it is customary to use Greek indices for the space-time coordinates, weshould rewrite the contracted Bianchi identities as follows
∇σ Eασ = Tσ
βρ ( 12 Rρβ
σα + δαβ Rσ
ρ) ; ∇σ Cσαβ = (Rαβ − Rβα) + Tσ Tσ
αβ , (48)
the Einstein tensor and the Cartan tensor being expressed as
Eαβ = Rαβ − 12 gαβ R ; Cγ
αβ = Tγαβ + Tα δβ
γ − Tβ δαγ . (49)
The matter content of the universe is represented, at each space-time point, by the stress-energytensor tαβ and the moment-stress-energy tensor mα
βγ (for details, see Halbwachs, 1960). Whiletalphaβ fundamentally describes the mass density content of the space-time, mα
βγ describes the spindensity content.
The fundamental postulate of gravitation theory is that the Einstein tensor is proportional to thestress-energy tensor, and that the Cartan tensor is proportional to the moment-stress-energy tensor:
Eαβ =8 π G
c4 tαβ ; Cγαβ =
8 π Gc4 mγ
αβ . (50)
This theory, including torsion and spin is called the Einstein-Cartan theory of gravitation, and thetwo equations above are called the Einstein-Cartan equations. See Hehl (1973, 1974) for details.
If the moment-stress-energy tensor is zero, then, the torsion tensor and the Cartan tensor vanish,the stress-energy tensor is symmetric, and we are left with the original Einstein theory of gravitation.Its fundamental equations are
∇σ Eασ = 0 ; Eαβ =
8 π Gc4 tαβ ; tαβ = tβα . (51)
14

5 References
Campbell, J.E., 1897, On a law of combination of operators bearing on the theory of continuoustransformation groups, Proc. London Math. Soc., 28, 381.
Campbell, J.E., 1898, On a law of combination of operators, Proc. London Math. Soc., 29, 14.Cartan, E., 1952, La theorie des groupes finis et continus et l’Analysis situs, Memorial des Sciences
Mathematiques, Fasc. XLII, Gauthier-Villars, Paris.Cauchy, A.-L., 1841, Memoire sur les dilatations, les condensations et les rotations produites par
un changement de forme dans un systeme de points materiels, Oeuvres completes d’AugustinCauchy, II-XII, 343–377, Gauthier-Villars, Paris.
Choquet-Bruhat, Y., Dewitt-Morette, C., and Dillard-Bleick, M., 1977, Analysis, Manifolds and Physics,North-Holland.
Coquereaux R. and Jadczyk, A., 1988, Riemannian geometry, fiber bundles, Kaluza-Klein theoriesand all that. . . , World Scientific, Singapore.
Eisenhart, L.P., 1961, Continuous Groups of Transformations, Dover Publications, New York.Goldberg, S.I., 1998, Curvature and homology, Dover Publications, New York.Halbwachs, F., 1960, Th´orie relativiste des fluides a spin, Gauthier-Villars.Hall, M., 1976, The theory of groups, Chelsea Publishing, New York.Hausdorff, F., 1906, Die symbolische Exponential Formel in der Gruppen Theorie, Berichte Uber die
Verhandlungen, Leipzig, 19–48.Hehl, F.W., 1973, Spin and Torsion in General Relativity: I. Foundations, General Relativity and Grav-
itation, Vol. 4, No. 4, 333–349.Hehl, F.W., 1974, Spin and Torsion in General Relativity: II. Geometry and Field Equations, General
Relativity and Gravitation, Vol. 5, No. 5, 491–516.Kaliski, S., 1963, On a model of a continuum with an essentially non-symmetric tensor of mechanical
stress, Arch. Mech. Stos., 15, 1, p. 33.Minkowski, H., 1908, Nachr. Ges. Wiss. Gottingen 53.Minkowski, H., 1910, Das Relativitatprinzip, Math. Ann., 68, p. 472.Møller, C., The theory of relativity, Oxford University Press, 1972.Neutsch, W., 1996, Coordinates, de Gruiter, Berlin.Nowacki, W., 1986, Theory of asymmetric elasticity, Pergamon Press.Oprea, J., 1997, Differential Geometry and its Applications, Prentice Hall.Rougee, P., 1997, Mecanique des grandes transformations, Springer.Schwartz, L., 1975, Les Tenseurs, Hermann, Paris.Sokolnikoff, I.S., 1951, Tensor Analysis – Theory and Applications, John Wiley & Sons.Srinivasa Rao, K.N., 1988, The Rotation and Lorentz Groups and Their Representations for Physicists,
John Wiley & Sons.Synge, J.L., 1971, Relativity: The General Theory, North-Holland.Terras, A., 1985, Harmonic Analysis on Symmetric Spaces and Applications, Vol. I, Springer-Verlag.Terras, A., 1988, Harmonic Analysis on Symmetric Spaces and Applications, Vol. II, Springer-Verlag.Truesdell C., and Toupin, R., 1960, The classical field theories, in: Encyclopedia of physics, edited by
S. Flugge, Vol. III/1, Principles of classical mechanics and field theory, Springer-Verlag, Berlin.Varadarajan, V.S., 1984, Lie Groups, Lie Albegras, and Their Representations, Springer-Verlag.Weinberg, S., 1972, Gravitation and Cosmology: Principles and Applications of the General Theory
of Relativity, John Wiley & Sons.
15

A Operations on a Manifold
A.1 Connection
The notion of connection has been introduced in section 2.2 in the main text. With the connectionavailable, one may then introduce the notion of covariant derivative of a vector field9, to obtain
∇iw j = ∂iw j + Γ jis ws . (52)
This is far from being an acceptable introduction to the covariant derivative, but this equation un-ambiguously fixes the notations. It follows from this expression, using the definition of dual basis,〈 , 〉 = δi
j , that the covariant derivative of a form is given by the expression
∇i f j = ∂i f j − Γ si j fs . (53)
A.2 Autoparallels
Consider now an arbitrary curve xi = xi(λ) , parameterized with an arbitrary parameter λ , at anypoint along the curve define the tangent vector (associated to the particular parameter λ ) as the vectorwhose components (in the local natural basis at the given point) are
vi(λ) ≡ dxi
dλ(λ) . (54)
The covariant derivative ∇ jvi is not defined, as vi is only defined along the curve, but it is easy togive sense (see below) to the expression v j ∇ jvi as the covariant derivative along the curve.
Definition 7 The curve xi = xi(λ) is called autoparallel (with respect to the connection Γ ki j ), if the co-
variant derivative along the curve of the tangent vector vi = dxi/dλ is zero at every point.
Therefore, the curve is autoparallel iffv j ∇ j vi = 0 . (55)
As ddλ
= dxi
dλ∂
∂xi = vi ∂∂xi , one has the property
ddλ
= vi ∂∂xi , (56)
useful for subsequent developments. Equation (55) is written, more explicitly, v j (∂ j vi + Γ ijk vk) = 0 ,
i.e., v j ∂ j vi + Γ ijk v j vk = 0 . The use of (56) allows then to write the condition for autoparallelism as
dvi
dλ+ Γ i
jk v j vk = 0 , or, more symmetrically,
dvi
dλ+ γi
jk v j vk = 0 , (57)
where γijk is the symmetric part of the connection,
γijk =
12
(Γ ijk + Γ i
k j) . (58)
9Using lousy notations, equation (2) can be written ∂i e j = Γ ki j ek . When considering a vector field w(x) , then,
formally, ∂iw = ∂i (w j e j) = (∂i w j) e j + w j (∂i e j) = (∂i w j) e j + w j Γ ki j ek , i.e., ∂iw = (∇i wk) ek where ∇i wk =
∂i wk + Γ ki j w j .
16

The equation defining the coordinates of an autoparallel curve are obtained by using again vi =dxi/dλ in equation (57):
d2xi
dλ2 + γijk
dx j
dλ
dxk
dλ= 0 . (59)
Clearly, the autoparallels are defined by the symmetric part of the connection only. If it exists aparameter λ with respect to which a curve is autoparallel, then any other parameter µ = α λ + β
(where α and β are two constants) shall also satisfy the condition (59). Any such parameter definingan autoparallel curve is called an affine parameter.
Taking the derivative of (57) easily gives
d3xi
dλ3 + Aijk` v j vk v` = 0 , (60)
where the following circular sum has been introduced:
Aijk` =
13
∮( jk`)(∂ jγ
ik` − 2 γi
js γsk`) . (61)
To be more explicit, let us, from now on, denote as xi(λ‖λ0) the coordinates of the point reachedwhen describing an autoparallel started at point λ0 . From the Taylor expansion
xi(λ‖λ0) =
xi(λ0) +dxi
dλ(λ0) (λ− λ0) +
12
d2xi
dλ2 (λ0) (λ− λ0)2 +13!
d3xi
dλ3 (λ0) (λ− λ0)3 + . . . ,(62)
one gets, using the results above (setting λ = 0 and writing xi , vi , γijk and Ai
jk` instead of xi(0) ,vi(0) , γi
jk(0) and Aijk`(0) ),
xi(λ‖0) = xi + λ vi − λ2
2γi
jk v j vk − λ3
3!Ai
jk` v j vk v` + . . . . (63)
A.3 Parallel Transport of a Vector
Let us now transport a vector along this autoparallel curve xi = xi(λ) with affine parameter λ
and with tangent vi = dxi/dλ . So, given a vector wi at every point along the curve, we wish tocharacterize the fact that all these vectors are deduced one from the other by parallel transport alongthe curve. We shall use the notation wi(λ‖λ0) to denote the components (in the local basis at pointλ ) of the vector obtained at point λ by parallel transport of some initial vector wi(λ0) given at pointλ0 .
Definition 8 The vectors wi(λ‖λ0) are parallel-transported along the curve xi = xi(λ) with affine pa-rameter λ and with tangent vi = dxi/dλ iff the covariant derivative along the curve of wi(λ) is zero at everypoint.
Explicitly, this condition writes (equation similar to equation (55),
v j ∇ j wi = 0 . (64)
17

The same developments that transformed equation (55) into equation (57) now transform this equa-tion into
dwi
dλ+ Γ i
jk v j wk = 0 . (65)
Given a vector w(λ0) at a given point λ0 of an autoparallel curve, whose components are wi(λ0) onthe local basis at the given point, then, the components wi(λ‖λ0) of the vector transported at anotherpoint λ along the curve are (in the local basis at that point) those obtained from (65) by integrationfrom λ0 to λ .
Taking the derivative of expression (65), using (57), (56) and (65) again one easily obtains
d2wi
dλ2 + H−i` jk v j vk w` = 0 , (66)
where the following circular sum has been introduced:
H±i` jk =
12
∮( jk)( ∂ j Γ
ik` ± Γ i
s` Γ sjk ± Γ i
js Γ sk` ) (67)
(the coefficients H+ijk` are to be used below). From the Taylor expansion
wi(λ‖λ0) = wi(λ0) +dwi
dλ(λ0) (λ− λ0) +
12
d2wi
dλ2 (λ0) (λ− λ0)2 + . . . , (68)
one gets, using the results above (setting λ0 = 0 and writing vi , wi and Γ ijk instead of vi(0) , wi(0)
and Γ ijk(0) ),
wi(λ‖0) = wi − λ Γ ijk v j wk − λ2
2H−
i` jk v j vk w` + . . . . (69)
Should one have transported a form instead of a vector, one would have obtained, instead,
f j(λ‖0) = f j + λ Γ ki j vi fk +
λ2
2H+
`jki vi vk f` + . . . , (70)
an equation that essentially is a higher order version of the expression (2) used above to introducethe connection coefficients.
A.4 Autoparallel Coordinates
Geometrical computations are simplified when using coordinates adapted to the problem in hand.It is well known that many computations in differential geometry are better done in ‘geodesic coor-dinates’. We don’t have here such coordinates, as we are not assuming that we deal with a metricmanifold. But thanks to the identification we have just defined between vectors and autoparallellines, we can introduce a system of ‘autoparallel coordinates’.
Definition 9 Consider an n-dimensional manifold, an arbitrary origin O in the manifold and the linear spacetangent to the manifold at O . Given an arbitrary basis {e1, . . . , en} in the linear space, any vector can bedecomposed as v = v1 e1 + · · · + vn en . Inside the finite region around the origin where the associationbetween vectors and autoparallel segments in invertible, to any point P of the manifold we attribute thecoordinates {v1, . . . , vn} , and call this an autoparallel coordinate system.
18

We may remember here equation (63)
xi(λ‖0) = xi + λ vi − λ2
2Γ i
jk v j vk − λ3
3!Ai
jk` v j vk v` + . . . , (71)
giving the coordinates of an autoparallel line, where (equations (58) and (61))
γijk =
12
(Γ ijk + Γ i
k j) ; Aijk` =
13
∮( jk`)(∂ jγ
ik` − 2 γi
js γsk`) . (72)
But if the coordinates are autoparallel, then, by definition,
xi(λ‖0) = λ vi , (73)
so we have the
Property 7 At the origin of an autoparallel system of coordinates, the symmetric part of the connection, γki j ,
vanishes.
More generally, we have the
Property 8 At the origin of an autoparallel system of coordinates, the coefficients Aijk` vanish, as vanish all
the similar coefficients appearing in the series (71).
A.5 Geometric Sum
Figure 8: Geometrical setting for the evalua-tion of the geovector sum z = w⊕ v . v
wz
w(P)
P
Q
O
We wish to evaluate the geometric sum
z = w⊕ v (74)
at third order in the terms containing v and w .To evaluate this sum, let us choose a system of autoparallel coordinates. In such a system, the
coordinates of the point P can be obtained as (equation (73))
xi(P) = vi , (75)
while the (unknown) coordinates of the point Q are
xi(Q) = zi . (76)
The coordinates of the point Q can also be written using the autoparallel that starts at point P . Asthis point is not at the origin of the autoparallel coordinates, we must use the general expression (63),
xi(Q) = xi(P) + Pwi − 12 Pγi
jk Pw jPwk − 1
6 PAijk` Pw j
PwkPw` + O(4) , (77)
19

where Pwi are the components (on the local basis at P ) of the vector obtained at P by paralleltransport of the vector wi at O . These components can be obtained, using equation (69), as
Pwi = wi − Γ ijk v j wk − 1
2H−
i` jk v j vk w` + O(4) , (78)
where Γ ijk is the connection and B−i
` jk is the circular sum defined in equation (67). The symmetricpart of the connection at point P is easily obtained as Pγi
jk = γijk + v` ∂`γ
ijk + O(2) , but, as
the symmetric part of the connection vanishes at the origin of an autoparallel system of coordinates(property (7)), we are left with
Pγijk = v` ∂`γ
ijk + O(2) , (79)
while PAijk` = Ai
jk` + O(1) but the coefficients Aijk` also vanish at the origin (property (7)) and
we are left with PAijk` = O(1) this showing that the last (explicit) term in the series (77) is, in fact (in
autoparallel coordinates) fourth order, and it can be dropped. Inserting then (75) and (76) into (77)gives
zi = vi + Pwi − 12 Pγi
jk Pw jPwk + O(4) . (80)
It only remains to insert here (78) and (79), this giving (dropping high order terms) zi = wi + vi −Γ i
jk v j wk − 12 B−i
jk` v j vk w` − 12 ∂`γ
ijk v` w j wk + O(4) . As we have defined z = w⊕ v , we can write,
instead,
(w⊕ v)i = wi + vi − Γ ijk v j wk − 1
2H−
i` jk v j vk w` − 1
2∂`γ
ijk v` w j wk + O(4) . (81)
To compare this result with expression (??),
(w⊕ v)i = wi + vi + eijk w j vk + qi
jk` w j wk v` + rijk` w j vk v` + . . . , (82)
that was used to introduce the coefficients eijk , qi
jk` and rijk` , we can change indices and use the
antisymmetry of Γ ijk at the origin of autoparallel coordinates, to write
(w⊕ v)i = wi + vi + Γ ijk w j vk − 1
2∂`γ
ijk w j wk v` − 1
2H−
ijk` w j vk v` + . . . , (83)
this giving
eijk =
12
(Γ ijk − Γ i
k j) ; qijk` = −1
2∂`γ
ijk ; ri
jk` = −12
H−ijk` , (84)
where the H−ijk` have been defined in (equation (67)). In autoparallel coordinates the term contain-
ing the symmetric part of the connection vanishes, and we are left with
H−i` jk =
12
∮( jk)( ∂ j Γ
ik` − Γ i
js Γ sk` ) . (85)
The torsion tensor and the anassociativity tensor are (equations (??))
Tki j = 2 ek
i j
A`i jk = 2 (e`
ir erjk + e`
kr eri j)− 4 q`
i jk + 4 r`i jk .
(86)
20

For the torsion this gives (remembering that the connection is antisymmetric at the origin of autopar-allel coordinates) Tk
i j = −2 eki j = −2 Γ k
ji = 2 Γ ki j = Γ k
i j − Γ kji i.e.,
Tki j = Γ k
i j − Γ kji . (87)
This is the usual relation between torsion and connection, this demonstrating that our definition ortorsion (as the first order of commutator) matches the the usual one. For the anassociativity tensorthis gives
A`i jk = R`
i jk +∇kT`i j , (88)
whereR`
i jk = ∂kΓ`
ji − ∂ jΓ`
ki + Γ `ks Γ s
ji − Γ `js Γ s
ki , (89)
and∇kT`
i j = ∂kT`i j + Γ `
ks Tsi j − Γ s
ki T`s j − Γ s
k j T`is . (90)
It is clear that expression (89) corresponds to the usual Riemann tensor while expression (90) corre-sponds to the covariant derivative of the torsion.
As the expression (88) only involves tensors, it is the same we would have obtained by performingthe computation in an arbitrary system of coordinates (not necessarily autoparallel).
B Bianchi Identities
B.1 Connection, Riemann, Torsion
We have found the torsion tensor and the Riemann tensor in equations (87) and (89):
Tki j = Γ k
i j − Γ kji
R`i jk = ∂kΓ
`ji − ∂ jΓ
`ki + Γ `
ks Γ sji − Γ `
js Γ ski .
(91)
For an arbitrary vector field, one easily obtains(∇i∇ j −∇ j∇i
)v` = R`
k ji vk + Tkji ∇kv` , (92)
a well known property relating Riemann, torsion, and covariant derivatives. With the conventionsbeing used, the covariant derivatives of vectors and forms are written
∇iv j = ∂iv j + Γ jis vs ; ∇i f j = ∂i f j − fs Γ s
i j . (93)
B.2 Basic Symmetries
Expressions (91) show that torsion and Riemann have the symmetries
Tki j = −Tk
ji ; R`ki j = −R`
k ji . (94)
(the Riemann has, in metric spaces, another symmetry10). The two symmetries above translate intothe following two properties for the anassociativity (expressed in equation (88)):∮
(i j)A`i jk =
∮(i j)R`
i jk ;∮
( jk)A`i jk =
∮( jk)∇kT`
i j . (95)
10Hehl (1974) demonstrates that g`s Rski j = −gks Rs
`i j .
21

B.3 The Bianchi Identities (I)
A direct computation, using the relations (91) shows that one has the two identities
∮(i jk)(Rr
i jk +∇iTrjk) =
∮(i jk)T
ris Ts
jk∮(i jk)∇iRr
` jk =∮
(i jk)Rr`is Ts
jk ,(96)
where, here and below, the notation∮
(i jk) represents a sum with circular permutation of the threeindices: i jk + jki + ki j .
B.4 The Bianchi Identities (II)
The first Bianchi identity becomes simpler when written in terms of the anassociativity instead of theRiemann. For completeness, the two Bianchi identities can be written
∮(i jk)Ar
i jk =∮
(i jk)Tris Ts
jk∮(i jk)∇iRr
` jk =∮
(i jk)Rr`is Ts
jk ,(97)
whereR`
i jk = A`i jk −∇kT`
i j . (98)
If the Jacobi tensor J`i jk =
∮(i jk)T
`is Ts
jk is introduced, then the first Bianchi identity becomes
∮(i jk)A`
i jk = J`i jk . (99)
C Total Riemann Versus Metric Curvature
C.1 Connection, Metric Connection and Torsion
The metric postulate (that the parallel transport conserves lengths) is
∇kgi j = 0 . (100)
This gives∂kgi j − Γ s
ki gs j − Γ sk j gis = 0 , (101)
i.e.,∂kgi j = Γ jki + Γik j . (102)
The Levi-Civita connection, or metric connection is defined as
{ki j} =
12
gks (∂ig js + ∂ jgis − ∂sgi j
)(103)
(the {ki j} are also called the ‘Christoffel symbols’). Using equation (102), one easily obtains {ki j} =
Γki j + 12 ( Tk ji + Tjik + Ti jk ) , i.e.,
Γki j = {ki j}+12
Vki j +12
Tki j , (104)
22

whereVki j = Tik j + Tjki . (105)
The tensor - 12 (Tki j + Vki j) is named ‘contortion’ by Hehl (1973). Note that while Tki j is antisymmet-
ric in its two last indices, Vki j is symmetric in them. Therefore, defining the symmetric part of theconnection as
γki j ≡
12
(Γ ki j + Γ k
ji) , (106)
gives
γki j = {k
i j}+12
Vki j , (107)
and the decomposition of Γ ki j in symmetric and antisymmetric part is
Γ ki j = γk
i j +12
Tki j . (108)
C.2 The Metric Curvature
The (total) Riemann R`i jk is defined in terms of the (total) connection Γ k
i j by equation (89). The met-ric curvature, or curvature, here denoted C`
i jk has the same definition, but using the metric connection{k
i j} instead of the total connection:
C`i jk = ∂k{`
ji} − ∂ j{`ki}+ {`
ks} {sji} − {`
js} {ski} (109)
C.3 Totally Antisymmetric Torsion
In a manifold with coordinates {xi} , with metric gi j , and with (total) connection Γ ki j , consider a
smooth curve parameterized by a metric coordinate s : xi = xi(s) , and, at any point along the curve,define
vi ≡ dxi
ds. (110)
The curve is called autoparallel (with respect to the connection Γ ki j ) if vi ∇ivk = 0 , i.e., if vi (∂ivk +
Γ ki j v j) = 0 . This can be written vi ∂ivk + Γ k
i j vi v j = 0 , or, equivalently, dvk
ds + Γ ki j vi v j = 0 . Using
then (110) givesd2xk
ds2 + Γ ki j
dxi
dsdx j
ds= 0 , (111)
which is the equation defining an autoparallel curve.Similarly, a line xi = xi(s) is called geodesic11 if it satisfies the condition
d2xk
ds2 + {ki j}
dxi
dsdx j
ds= 0 , (112)
11When a geodesic is defined this way on must prove that it has minimum length, i.e., that the integral∫
ds =∫ √gi j dxi dx j reaches its minimum along the line. This is easily demonstrated using standard variational techniques
(see, for instance, Weinberg, 1972).
23

where {ki j} is the metric connection (see equation (103)).
Expressing Γ in terms of the metric connection and the torsion (equations (104)–(105)), the con-dition for autoparallels is d2xk
ds2 +({k
i j}+ 12 (Tk
ji + Tjik + Ti j
k)) dxi
dsdx j
ds = 0 . As Tki j is antisymmetric
in {i, j} and dxi dx j is symmetric, this simplifies into
d2xk
ds2 +({k
i j}+12
(Ti jk + Tji
k))
dxi
dsdx j
ds= 0 . (113)
We see that a necessary and sufficient condition for the lines defined by this last equation (the au-toparallels) to be identical to the lines defined by equation (112) (the geodesics) is Ti j
k + Tjik = 0 .
As the torsion is, by definition, antisymmetric in its two last indices, we see that, when geodesics andautoparallels coincide, the torsion T is a totally antisymmetric tensor:
Ti jk = -Tjik = -Tik j . (114)
When the torsion is totally antisymmetric, it follows from the definition (105) that one has
Vi jk = 0 . (115)
Then,
Γ ki j = {k
i j}+12
Tki j , (116)
and
{ki j} =
12
(Γ k
i j + Γ kji)
= γki j , (117)
i.e., when autoparallels and geodesics coincide, the metric connection is the symmetric part of thetotal connection.
Note: explain here that, if the torsion is totally antisymmetric, one introduces the tensor J as
J`i jk = T`
is Tsjk + T`
js Tski + T`
ks Tsi j , (118)
i.e.,J`
i jk =∮
(i jk) T`is Ts
jk . (119)
It is easy to see that J is totally antisymmetric in its three lower indices,
J`i jk = -J`
jik = -J`ik j . (120)
24