Aircraft Positioning for Airborne Gravimetry · 24/05/2016 · Aircraft Positioning for Airborne...
45
Aircraft Positioning for Airborne Gravimetry Dr. Theresa Damiani NOAA- National Geodetic Survey Day 2: Airborne Gravity Data Collection and Processing Tuesday, May 24, 2016
Transcript of Aircraft Positioning for Airborne Gravimetry · 24/05/2016 · Aircraft Positioning for Airborne...

Aircraft Positioning for Airborne Gravimetry
Dr. Theresa Damiani NOAA- National Geodetic Survey
Day 2: Airborne Gravity Data Collection and Processing
Tuesday, May 24, 2016

Outline
I. Position, Navigation, and Timing (PNT) Needs of Airborne Gravimetry
II. PNT overview- How Global Navigation Satellite Systems (GNSS) work
III. Kinematic positioning with GNSS IV. Coupled kinematic positioning with GNSS + IMU
V. GRAV-D examples of positioning implementation

Position, Navigation, and Timing (PNT) Needs of Airborne Gravimetry
Part I

PNT Needs for Airborne Gravity
1. Real-time navigation of the aircraft along pre-planned tracks, resulting in smooth motion of the aircraft.
2. Real-time GNSS stamp of location and time to each sample of collected raw gravity and IMU data.
3. Real-time position input to gravimeter, for mechanical feedback during operation.
4. Post-Processing precise position and orientation data into a trajectory for use in gravity corrections.

Gravity corrections relying on positioning and attitude
Minimizing errors in your aircraft’s positioning will decrease the errors in your gravity data!
Gravimeters measure the TOTAL acceleration they experience. Generally:
ameasured = g + aaircraft_vertical + corrections + calibration + drift

PNT overview- How GNSS works
Part II

PNT Terminology
• Navigation: – Actively plotting, ascertaining, and correcting relative position,
velocity, and attitude in order to follow a route – Real-time, “Where am I with respect to where I want to go?”
• Positioning: – Finding absolute position, velocity, and attitude over time with
respect to a pre-defined reference. – Real-time and post-processed, “Where is/was I on Earth?”
• Attitude: – The acceleration, orientation, rates; pitch, roll, yaw, heading. – Real-time and post-processed, “How was I moving?”
• Trajectory: – The history (time series) of position, velocity, and orientation. – The result of post-processed positioning, “This is where it
was.”

PNT Methods for Scientific Aircraft
• Navigation: – Maps, aircraft instruments, radio aides, dead reckoning, autopilots, INS
(Inertial Navigation Systems = GNSS + Inertial Measurement Unit (IMU))
• Positioning: – GNSS (Global Navigation Satellite Systems) including GPS (U.S. Global
Positioning System), GLONASS (Russia), GALILEO (E.U.), BeiDou (China), QZSS (Japan), and IRNSS (India); Also, INS.
• Attitude: – IMU, GNSS antenna array, aircraft avionics recordings
• Trajectory: – Post-processing software for GNSS and IMU data, with respect to a
particular point on or inside the aircraft.

How does GNSS work? Example: GPS (Global Positioning System, U.S)
Constellation of Satellites (left) and Ground Control Stations (right)
• Satellites orbit the planet so that there are 4 or more visible from every location on the surface; their orbital period is ~12 hours and altitude is ~20,000 km.
• Other GNSS in orbit increase the number of possible visible satellites. • All GNSS transmit several frequencies of relatively weak, ultra-high frequency
(UHF) radio signals to Earth, encoded with information. • Satellites’ orbits are tracked by world-wide systems of ground stations. http://www.gps.gov/s
ystems/gps/control/

IGS GPS Satellite Ephemeris & Clocks
Product Name Information Accuracy Latency
Broadcast (transmitted by satellite)
Orbits ~100 cm Real-Time
Satellite Clocks ~5 ns RMS, ~2.5 ns Std. Dev.
Ultra-Rapid (2nd 24 hours, predicted half)
Orbits ~5 cm Real-Time
Satellite Clocks ~3 ns RMS, ~1.5 ns Std. Dev.
Ultra-Rapid (1st 24 hours, observed half)
Orbits ~3 cm 3 – 9 hours
Satellite Clocks ~ 150 ps RMS, ~50 ps Std. Dev.
Rapid
Orbits ~2.5 cm 17 – 41 hours
Satellite Clocks ~75 ps RMS, ~25 ps Std. Dev.
Final Orbits ~2.5 cm 12 – 18 days
Satellite Clocks ~75 ps RMS, ~20 ps Std. Dev.
DOW
NLO
AD O
NLI
NE:
ht
tps:
//ig
scb.
jpl.n
asa.
gov/
com
pone
nts/
prod
s.ht
ml
International GNSS Service

Modern Satellite Navigation Signals
L1 L2 L5
Source: Betz (2013) “Something Old, Something New. Signal Structures for Satellite-Based Navigation: Past, Present, and Future.” InsideGNSS. Online: http://www.insidegnss.com/node/3623
G1 G2
E2-L1-E1 E6 E5b E5a+b E5a
L1 L5
Bolded signals are included in RINEX version 2.11
U.S.
Russia
E.U.
China
Japan L1 L2 L5
E6
L5 India
SBAS: Satellite-based augmentation sytems
Upper L-Band Frequencies Lower L-Band Frequencies

Errors in GPS Positioning
More on clock errors : GPS & Relativity: http://www.astronomy.ohio-state.edu/~pogge/Ast162/Unit5/gps.html
Source User’s Range Error (m)
Ionospheric Effects ± 5
Satellite Clock Errors ± 2
Broadcast Ephemeris Errors ± 1
Multi-path Distortion ± 1
Tropospheric Effects ± 0.5
• Have multiple frequencies of data plus models of Earth’s troposphere and ionosphere. Why: the frequencies refract differently in the atmosphere (therefore arriving with different delays), which reveals the state of the atmosphere.
• Ephemeris errors and satellite clock errors (due to Relativity) decrease by using more precise orbits and clocks (IGS & others).
• Multi-path (GPS signal reflections) can be reduced by carefully choosing receiver antennas, thoughtful field placements, and using calibrations (NGS/IGS).
• Looking at the phase change of the both the codes and carrier waves (i.e. “carrier-phase”) • Making measurements during times of good satellite geometry (DOP) and space weather.
For Pseduorange measurements
Ways to reduce errors:

Kinematic positioning with GNSS
Part III 3 “carrier-phase” positioning
techniques emerge for kinematic: DGPS, PPPK, and RTK.

Differential GNSS Positioning (DGPS) • Also called double-differencing, this is a post-processing technique. • Requires: kinematic receiver and at least one static base station • Best results:
– Both receivers experience similar ionospheric and tropospheric errors. These errors are mostly in common, therefore mostly cancel out of the position equations.
– Have at least ultra-rapid ephemeris and clocks (< 9 hour wait); Best with precise (12-18 day)

• This is a post-processing technique. • Requires: kinematic receiver. • Best results:
– Good ionospheric and tropospheric models are available. – Precise (final) ephemeris and clocks (12 – 18 day wait) – Only multi-path and un-modeled errors are left.
Kinematic Precise Point Positioning (PPPK or K-PPP)
Download precise (final) ephemeris and clocks 12-18 days later
Measured: x y z Better Delta: x y z True: x y z

Real-Time Kinematic (RTK)
Delta: x y z
• The same as DGPS but with obtaining corrections in real-time. • Requires: kinematic receiver and at least one static base station hooked up to a transmitter. • Best results:
– Rover remains within ~30 km of the base station (s); Real-Time Networks (RTNs) work better. – Works best as Stop-N-Go (or Semi-Kinematic) when rover stops moving for seconds to
minutes, in order for position solution to converge.
More on this on Thursday

Pros and Cons of Positioning Methods
Method Approximate Accuracy*
Continuity and Integrity
Latency (Wait Time)
Availability (Range)
Noise smoothing
DGPS ~10 cm or better Base station needed- ownership, accessibility, security, malfunction
< 9 hours (for ultra-rapid orbits) or up to 12-18 days for precise orbits
No limit. Rule of thumb: best results <100 km between base and rover.
Can post-process in forward and reverse directions; smooth results; Optional: IMU
PPP ~10 cm or better Reliant on IGS release of orbits (very reliable)
12-18 days for precise orbits
No limit. Can post-process in forward and reverse directions; Smooth results; Optional: IMU
RTK True kinematic: ~10 cm – 1 m Semi-kinematic: a few cm
Base station needed- ownership, accessibility, security, malfunction
None (real-time)
Stay within ~30 km of base station; Networks not available in many areas
Forward direction only; Kalman filter; No smoothing; Optional: IMU
*For all of these, two large error sources remain: Dilution of Precision and Multi-Path

Satellite Geometry: Dilution of Precision
• A measures of the quality of receiver-to-satellite geometry
• Several Types of Dilution of Precision (DOP): – GDOP (Geometric), VDOP (Vertical), PDOP
(Position), etc.
• Geometry accounts for both: • Zenith (satellite elevation in sky) and • Azimuth (compass direction of satellite) • Geometry shown on a “bullseye” plot
• Can be forecasted based on predicted satellites’ orbits; many software packages available for this.
• Range from 0 to Infinity; Usually 1-3
Above: Good GDOP; Below: Worse GDOP
Images: https://en.wikipedia.org/wiki/Dilution_of_precision_(GPS)

Multi-Path
• Reflections of GNSS signals off of radio-reflective surfaces • A dominant source of current GNSS errors • Two types:
– Specular: Clear, coherent signals bouncing off of smooth, radio-reflective surface (like snow, still water, metal roofs, metal poles, etc.)
– Diffuse: Momentary, scattered signals bouncing off of moving or broken-up radio-reflective surfaces (like ocean waves, vegetation, chain link fences, etc.)
• Antenna choke rings and setup best practices (next slide) mitigate some multi-path errors.
• Advantage of PPP: one antenna means one sources of multipath not two or more like in DGPS.
• “One man’s noise is another man’s signal” – GPS Reflectrometry uses multipath signals for environmental studies

Excerpts from CORS Guide
http://www.ngs.noaa.gov/PUBS_LIB/CORS_guidelines.pdf http://www.ngs.noaa.gov/CORS/Establish_Operate_CORS.shtml
Following as many of these recommendations as possible will improve your positioning.

Space Weather Interference
• Solar activity (flares, which are called coronal mass ejections) that reach Earth cause geomagnetic storms in the ionosphere that interfere with GNSS positioning. – Primarily, this is due to ionospheric scintillation, or patches of the
ionosphere with increased diffraction and refraction of radio waves. – More on scintillation: http://www.insidegnss.com/node/1579
• Solar weather can be predicted in advance and should be monitored while in the field. – Sign up for the NOAA Space Weather Alerts:
http://www.swpc.noaa.gov/content/subscription-services
– Many types of solar weather exist, but for GNSS the only one that matters are geomagnetic storms. On the NOAA scale, storms greater than G2 cause significant scintillation and it’s not advisable to fly airborne gravity missions in these conditions.
– The effects are worst at high geomagnetic latitudes and near the poles.

NOAA Geomagnetic Storm Scale

Weaknesses of GNSS-only kinematic positioning
• Cannot have even one second where there is lock on less than 4 satellites, or whole position solution from there forward is lost.
• GNSS signals are relatively weak, making them vulnerable to jamming and interference. – Using traditional GPS dual frequency (L1/L2) antennas and
receivers means that loss of 1 frequency is enough to destroy your position solution.
– Using GNSS multi-frequency antennas and receivers is more robust (L1/L2/L5/G1/G2/E5b/E6).
• Usually “high-rate” is considered 1 Hz but a lot of plane motion can happen in 1 second.

Example of Real Jamming Data

Example of Real Jamming Data

Coupled kinematic positioning with GNSS + IMU
Part IV

Adding an Inertial Measurement Unit
• What is an IMU? – One triad of equal-quality accelerometers and one triad of equal-quality gyros. – Can be “strapdown” (fixed to instrument case, most common) or on a
gimballed platform. – Raw measurements: Accelerations (gravity + other forces) and rotation rates
• IMUs provide derived aircraft attitude/orientation information: – Pitch, roll, yaw, heading and rates of change – All IMUs require static initialization (a.k.a. alignment), where they orient
themselves relative to the spin of Earth and the gravity vector. – Run at very high data rates, e.g. 200Hz
• IMUs initially developed in the 1930s for missile guidance. • In the U.S., high-accuracy gyroscopes invented at Draper
Laboratories (Massachusetts Institute of Technology) in the 1960s for NASA’s Apollo missions to the moon.

Coordinates & Reference Frames
Inertial: frame in which a body stays at rest or moves with constant linear velocity unless acted on by another force. ECEF: Center of mass, rotates with Earth
Body Frame: Fixed to the vehicle center of mass. In aircraft, axes are aligned with the motion axes of pitch, roll, and yaw.
Cross-track
Along-track
Geodetic: Latitude, Longitude, Height with a reference ellipsoid GPS receivers record XYZ coordinates in ECEF that are often immediately transformed to geodetic coordinates by assuming a pre-programmed ellipsoid or other reference frame.
Pitch Roll Heading
http://www.grc.nasa.gov/WWW/k-12/VirtualAero/BottleRocket/airplane/bga.html
https://en.wikipedia.org/wiki/Axes_conventions

Grades of IMUs
Inertial Grade Commercial* Tactical Navigation
Example Applications
Anti-lock brakes, Airbags, Game controllers, Smartphones, etc.
Missile Guidance Aircraft and Marine Navigation Systems
Gyroscope Accuracy (Drift)
> 10 deg/hr 0.1 – 10 deg/hr 0.001 – 0.1 deg/hr
Gyroscope Technology
Silicon MEMSǂ Fiber Optic, Ring Laser, and Silicon MEMs
Fiber Optic and Ring Laser
Accelerometer Accuracy
> 1 milli g (> 980 mGal)
.1 µg – 1 millig (98 mGal – 980 mGal)
.01 - .1 µg (9 – 98 mGal)
Accelerometer Technology
Silicon MEMs Quartz Resonant, Silicon MEMs
Quartz Resonant, Silicon MEMs
*Also called Short-Term or Automotive or Industrial ǂ Micro Electro Mechanical Systems

GNSS/IMU Integration
• Several levels of “coupling” between IMUs and GNSS. – Uncoupled: Separate IMU and GNSS instruments, data, and position
solutions. They are completely independent. – Loosely-coupled: GNSS-only position solution obtained (DGPS or PPPK)
and then merged with IMU raw data to get 2nd position solution. – Tightly-coupled: GNSS and IMU raw data are combined using a
suitable filter (e.g. Extended Kalman) to get one position solution. – Ultra-tightly coupled: GNSS measurements used to estimate IMU
errors and IMU measurements used to aid GNSS tracking loops at the instrument/receiver firmware level, usually to obtain better real-time, “predicted” positions.
• All integrations require accurate measurement of the lever
arms between instruments. – Lever arm takes into account physical offsets between the GNSS
position (at the antenna) and the IMU.
Post
-pro
cess
ing
Real
-Tim
e

Positioning Aircraft vs. Instrumentation
• GNSS-only the gives position of antenna, not the gravimeter
• IMU-coupled solutions apply the lever arm offsets and rotations as measured by the IMU.
IMU
GPS Antenna
Gravimeter
GPS
IMU
Gravity Sensor
Body Frame

Post-Processing GNSS/IMU Data
• In real-time ultra-tightly coupled GNSS/IMU integration, the single-direction Kalman filter is the only smoothing possible and you only have data for past times.
• In post-processing, there is the advantage that both GNSS and IMU data already exists for the entire flight.
• Data can be processed from t1 to tfinal AND from tfinal to t1 (forwards and backwards in time). – The two passes can be done independently and compared for
accuracy/quality statistics. – Or the passes can be done in sequence, where error information
calculated on the first pass can be used in the 2nd pass and so on if multiple passes are desired.
– Plus, a final smoother can be applied in post-processing.

GRAV-D example of positioning implementation for airborne gravimetry

GRAV-D Positioning: Instrumentation
Navigation Grade IMU: Micro-IRS from Honeywell
Inside: Q-Flex Accelerometers
1 inch diameter
Dimensions: 6.5” x 6.4” x 6.4” Volume: 267 cubic inches Weight: 9.3 lbs Power Consumed: 20 watts Volume: < 5 cubic inches
INS: NovAtel SPAN-SE System
GNSS Receiver: GPS L1/L2 GLONASS Optional: L-Band SBAS
Matching GNSS Aircraft Antenna
Inside: GG1320 Digital Ring Laser Gyros

GRAV-D Positioning: Field Work
• Positioning Goals: – Good (not perfect) trajectory of aircraft to use for input to gravity
corrections, so that a good-quality gravity product is available for quality control checks
– GNSS and IMU data downloaded and checked for quality
• Operational Goals: – Health of all instruments (Gravimeter, GNSS, and IMU) are verified
prior to the next scheduled flight – Decisions can be made about the quality of data, schedule possible re-
flights, and time set aside to fix broken instruments
• DGPS, tightly-coupled is the in-field positioning technique: – Latency: 3-9 hours for ultra-rapid orbits and clocks, which are only
slightly less accurate than precise (final) orbits and clocks – Trained field team member sets up 2 base stations (for redundancy) at
the airfield and downloads the data when flights are complete. – Advantages of having IMU data tightly-coupled

Checklist for GRAV-D Positioning
– GPS Base stations located precisely by collecting 24 hrs of data, processing through NGS’ Online User Positioning Service (OPUS) http://www.ngs.noaa.gov/OPUS/
– Antenna calibrations for base stations are identified (http://www.ngs.noaa.gov/ANTCAL/)
– Lever arms between the aircraft’s GNSS antenna and IMU, and GNSS antenna and center of gravimeter sensor are precisely measured with surveying equipment.
– GNSS and IMU test data are collected and verified. – Uninterrupted, good quality data from at least one GNSS base station starting
before aircraft taxi to ending after aircraft parking. – Uninterrupted, good quality GNSS and IMU data on the aircraft.
• Includes 5 minutes of IMU data on the ground before aircraft moves, for IMU to achieve alignment.
– Ultra-rapid orbits and clocks from the IGS or another source – Post-processing software package: NovAtel’s Inertial Explorer package

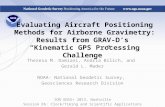
Kinematic GPS Processing Challenge • What are the precision and
accuracy of available kinematic positioning software packages and quality of final gravity?
• Louisiana 2008, well-known gravity field
• Two days: 297 (blue, noisy conditions) and 324 (red, stable conditions)
• GPS Data, 1 Hz: – Two aircraft receivers, two
GRAV-D temporary base stations, three CORS
New Orleans

Submitted Position Solutions
• 19 solutions • 11 Institutions: U.S., Canada,
Norway, France, and Spain • 10 kinematic processing
software packages
• XYZ coordinates submitted, transformed to LLH
• Anonymous position solution numbers (ps01-ps19)
9 8
2
PPP Differential, Single Baseline
Differential, Network

Comparison to Ensemble Average
Latitude
Longitude
Ellipsoidal Height
Single Baseline Differential
Network Differential
PPP

Confidence Intervals
99.7% points for any position solution of a GRAV-D flight, created with modern kinematic software and an experienced user, should be precise to within +/- 3-sigma. Latitude most precise, Ellipsoidal Height least precise
Latitude Difference (m)
Longitude Difference (m)
Ellipsoidal Height Difference (m)
All Day 297 Solutions 0.089 0.143 0.348All Day 324 Solutions 0.072 0.094 0.270
3-sigma (99.7%)Data Set
3-sigma (99.7%)
3-sigma (99.7%)

Stationary Time Periods- Accuracy
• Truth: NGS’ OPUS positions for start and end of flight stationary time period • Kinematic Solutions averaged during stationary time; 3-sigma error ellipses • Two examples of significant average biases below appear significant. • No consistent pattern in accuracy based on solution type
Longitude vs. Latitude Day 297
Ellipsoidal Height Day 324
-13.6
-4.1
-3.7

Gravity Results
• Statistics showed that the GPS+IMU coupled solution is consistently a better match to EGM2008 on these lines
EGM2008 NGS GPS+IMU

Chosen final positioning technique
• NGS Kinematic GPS Processing Challenge led to additional tests of PPPK vs. DGPS tightly-coupled for aircraft positioning.
• A very slight increase in the quality of whole-survey gravity results when using PPPK led to the choice of PPPK tightly-coupled as our final processing technique.
• Data is shipped back to the NGS Silver Spring office after the conclusion of a survey and all of it is reprocessed with precise (final) IGS orbits using a PPPK, tightly-coupled technique.
• The increase in gravity accuracy from the field-produced product to the final office-produced products is small but significant.

Positioning Continues to Evolve
• Active research in precise kinematic positioning community, particularly for: – Unmanned Aerial Vehicles (UAVs) – Precision agriculture – Self-driving (or driverless) cars
• Many opportunities for continued positioning improvement, which has the direct benefit of improved gravimetry products.