
Equivalent Linearization for Nonlinear Random Vibration Elishakoff, I. And Cai, G.Q., “Approximate...
29
Equivalent Linearization for Nonlinear Random Vibration Elishakoff, I. And Cai, G.Q., “Approximate solution for nonlinear random vibration problems by partial stochasti c linearization”, Probabilistic Engineering Mechanics, V ol. 8, pp. 233-237,1993. Zhao, L. and Chen, Q., ”An equivalent non-linearization method for analyzing response of nonlinear systems to ra ndom excitations”, applied Mathematics and Mechanics, Vo l. 18, pp. 551-561, June 1997. Polidori, D.C. and Beck, J.L.,“Approximate solutions for non-linear random vibration problems”, Probabilistic Eng ineering Mechanics, Vol. 11, pp. 179-185, July 1996.
-
Upload
heather-paul -
Category
Documents
-
view
229 -
download
1
Transcript of Equivalent Linearization for Nonlinear Random Vibration Elishakoff, I. And Cai, G.Q., “Approximate...
Equivalent Linearization forNonlinear Random Vibration
Elishakoff, I. And Cai, G.Q., “Approximate solution for nonlinear random vibration problems by partial stochastic linearization”, Probabilistic Engineering Mechanics, Vol. 8, pp. 233-237,1993.Zhao, L. and Chen, Q., ”An equivalent non-linearization method for analyzing response of nonlinear systems to random excitations”, applied Mathematics and Mechanics, Vol. 18, pp. 551-561, June 1997.Polidori, D.C. and Beck, J.L.,“Approximate solutions for non-linear random vibration problems”, Probabilistic Engineering Mechanics, Vol. 11, pp. 179-185, July 1996.
Contents
1. Equivalent Linearization Method for SDOF System
2. Partial Stochastic Linearization Method
3. Equivalent Non-linearization Method
4. Approximate Solutions for Non-linear Random Vibration
5. Equivalent Linearization Method for MDOF System
1. Equivalent Linearization Method for SDOF System
1.1 Origin
* Originated by Krylov and Bogoliubov (1937) for the
treatment of nonlinear systems under deterministic
excitation
* Bootom and Caughey (1963) first applied the method
to random oscillation problems
1.2 Derivation
For a non-linear SDOF system
)(),( tFXXgX
An approximate solution can be obtained from the followinglinearized equation
)(tFXKXX ee
DefineXKXXXg ee ),(
0][][][0][
22
XXKXEgXEE eee
Then
0][][][0][
22
XKXXEXgEEK ee
e
222
2
])[(][][][][][][
XXEXEXEXgEXXEgXEXE
e
222
2
])[(][][][][][][
XXEXEXEgXEXXEXgEXE
Ke
If F(t) is stationary, Gaussian, and has a zero mean, then
][][
2XEgXE
e
][][
2XEXgE
Ke
0][ XXE
The undetermined coefficients can be rewritten as
Note: The formulas are not explicit expression for e and Ke, since the expectations appearing on the r.h.s depend on e and Ke.
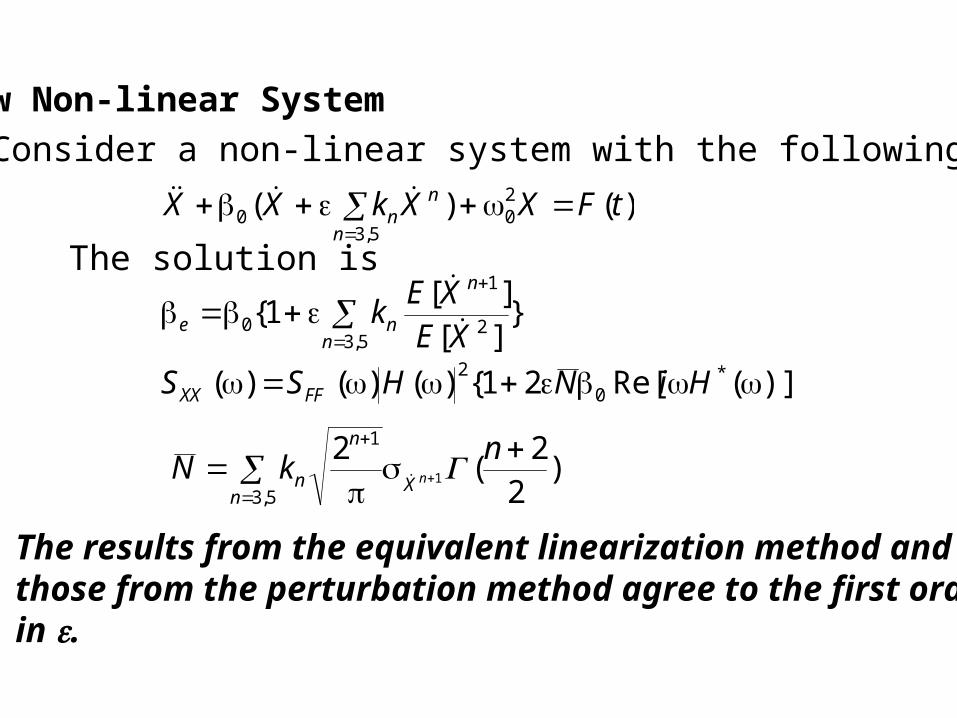
1.3 Low Non-linear System
Consider a non-linear system with the following form
)()( 20
5,30 tFXXkXX n
nn
}][][
1{5,3
2
1
0
n
n
ne XEXE
k
)]}(Re[21{)()()( *0
2 HiNHSS FFXX
)2
2(
21
5,3
1
nkN nX
n
n
n
The solution is
The results from the equivalent linearization method andthose from the perturbation method agree to the first orderin .
1.4 Highly Non-linear System
When the non-linear term is not small, the equivalent
linearization is often an iterative procedure.
1. Guess an initial value of e and Ke.
2. Calculate the response of the equivalent linear system.
3. From the response, calculate the new e and Ke.
In certain simple cases, it’s possible to obtain an explicit
expression for X . In general, the accuracy of the first and the
second statistical moment based on the method can satisfy the
demands of engineering application.
2. Partial Stochastic Linearization Method
• Classical stochastic technique, where both nonlinear
damping and nonlinear restoring force are replaced
by their respective linear counterparts.
• Partial Linearization using the concept of average
energy dissipation to deal with the part of nonlinear
damping only.
Consider the following nonlinear equation
The equivalent equation with linear damping force
)()(),( tFXgXXfX
)()( tFXgXX e
The criterion for selecting is that average energy dissipation remains the same
e
][)],([ 2XEXXfXE e
According to the Ito differential rule and take the ensemble average, we can get
][ 2XEK
e
K is the spectral density of the white noise excitation F(t)
Through some tedious derivation, can be solved
analytically or numerically. e
xe xdxdduugx
KKxxfx
0
2
-
- 0]})(
2[exp{]),([
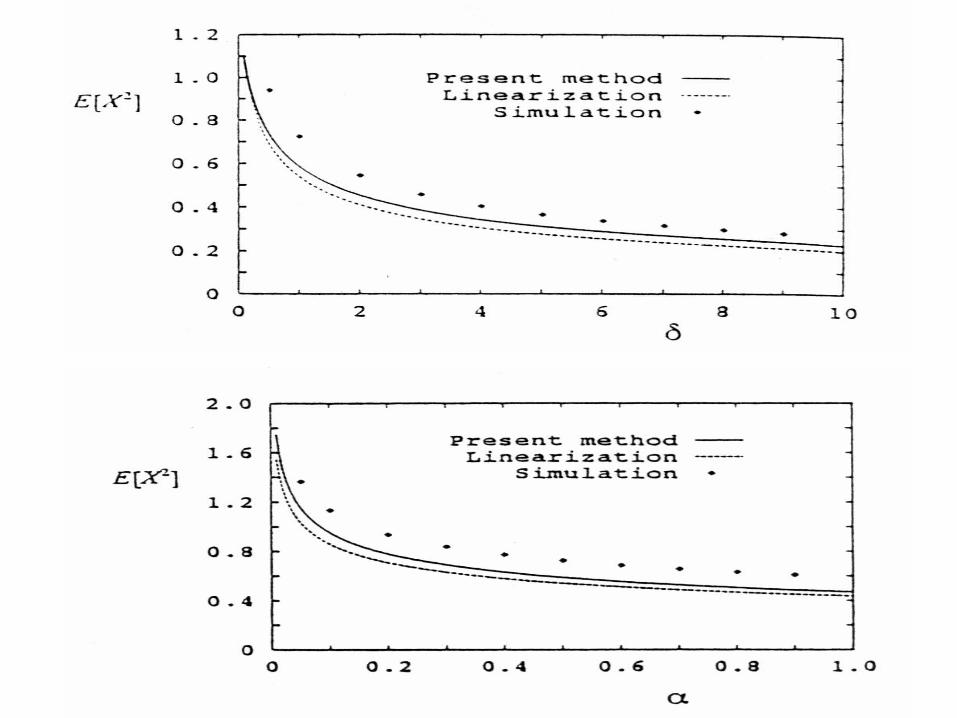
Illustrative Example
Consider a system governed by
)(33 tFXXXXX
•The stochastic linearization method yields
)]22
(exp[),(22 xKx
KCxxp ee
Ke 3)2
(2
2 ande
e
KK
3
)2
(2
2
•The partial linearization method yields
)]422
(exp[),(422
1
xxxK
Cxxp e
3. Equivalent Non-linearization Method
)(3/7 tFxKxCx ee
•Replacing the non-linear restoring function by an g
by an equivalent linear damping force and a non-linear
restoring force.
)(),( tFxxgx
0][
; 0][
] )),(( [][22
23/72
ee
ee
KE
CE
xKxCxxgEE
•To minimize the difference between the two systems
• We assume that the excitation F(t) is stationary and Gaussian white noise and has a zero expectation.
• The velocity and the displacement are independent of each other.
][/]),([
][/]),([3/143/7
2
xExxxgEK
xExxxgEC
e
e
The formulas are not explicit expression for and .Hence, an iterative solution procedure is generally required to select the desired and .
eC eK
eC eK
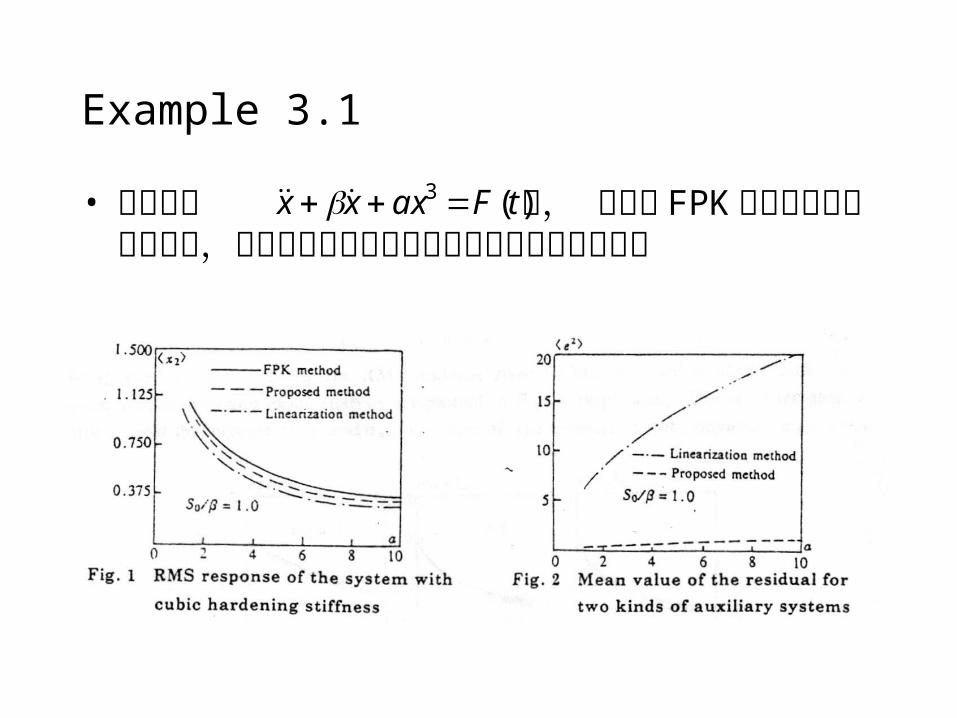
Example 3.1
• 當系統為 時, 可以與 FPK方法得到的解析解比較,知道此方法所得到的結果比等價線性法誤差小
)(3 tFaxxx
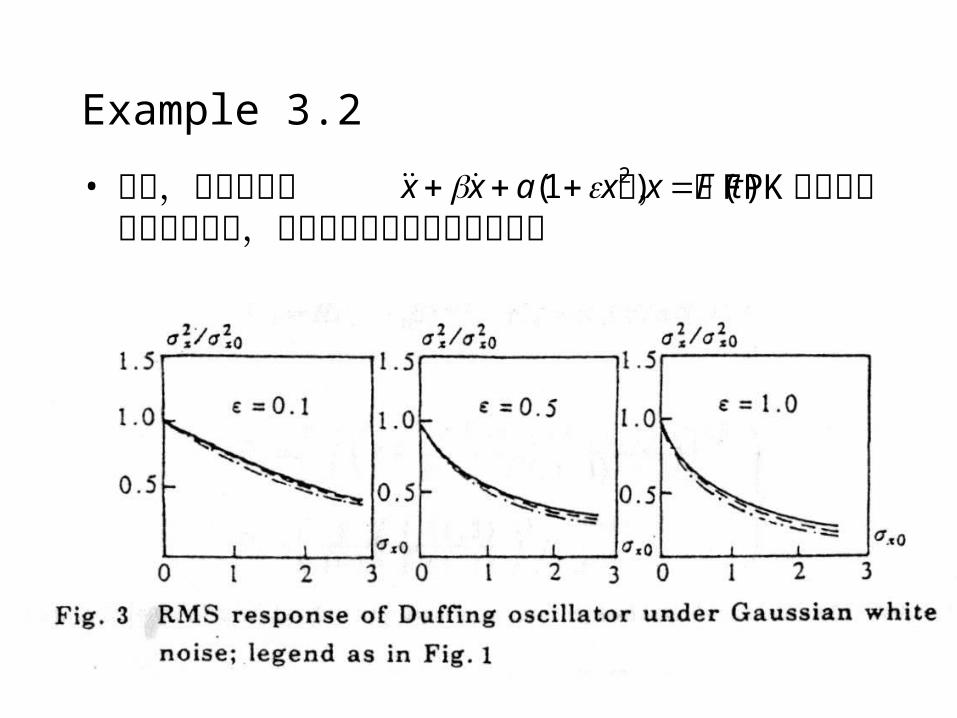
Example 3.2
• 同樣,在當系統為 時, 與 FPK 方法得到的解析解比較,結果也是比等價線性法誤差小
)()1( 2 tFxxaxx
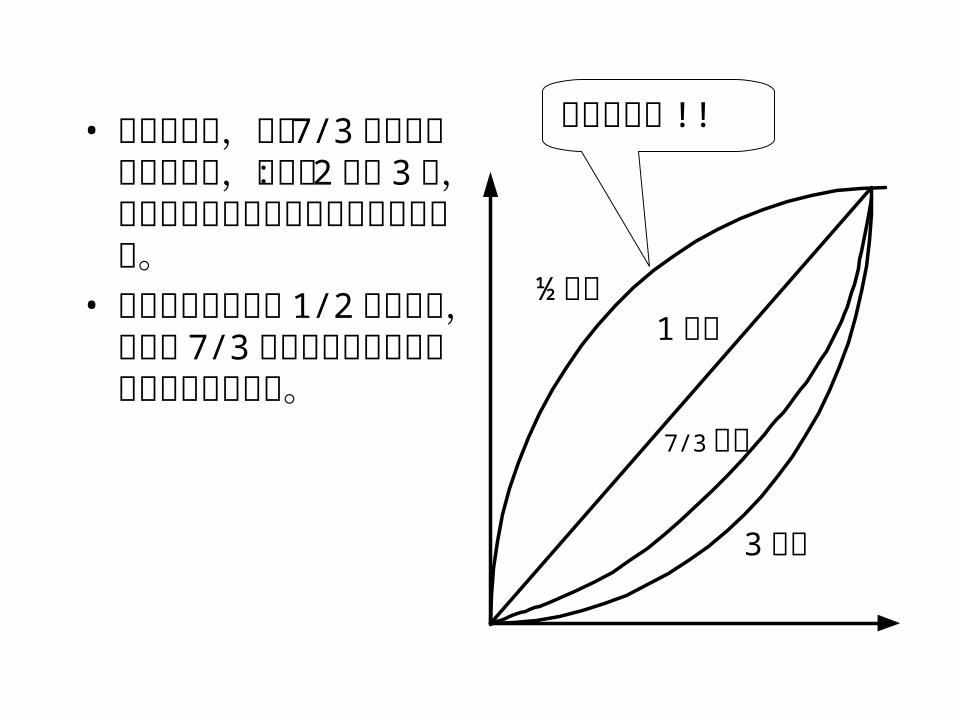
• 如右圖所示,若以 7/3次方來近似高次方項,例如: 2 次或 3 次,則必然可以得到比使用線性更好的結果。
• 若此非線性系統與 1/2次方相關,則顯然 7/3次方並不會得到比線性近似更好的結果。
½ 次方 1 次方
3 次方
7/3 次方
這就是破綻 !!
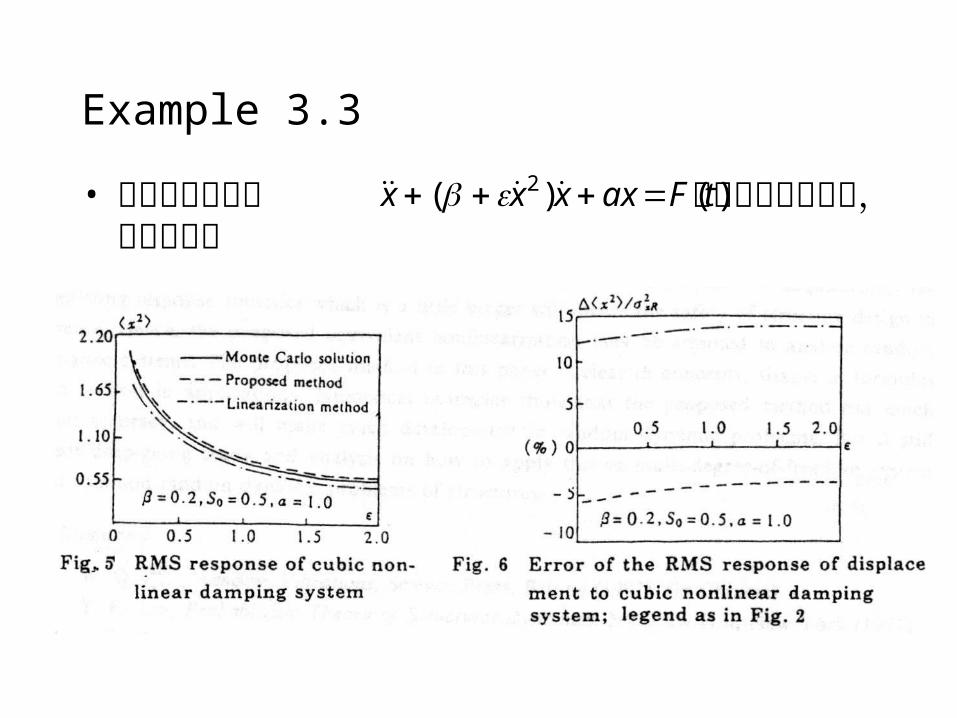
Example 3.3
• 若以此方法模擬 的非線性阻尼系統,效果也不錯
)()( 2 tFaxxxx
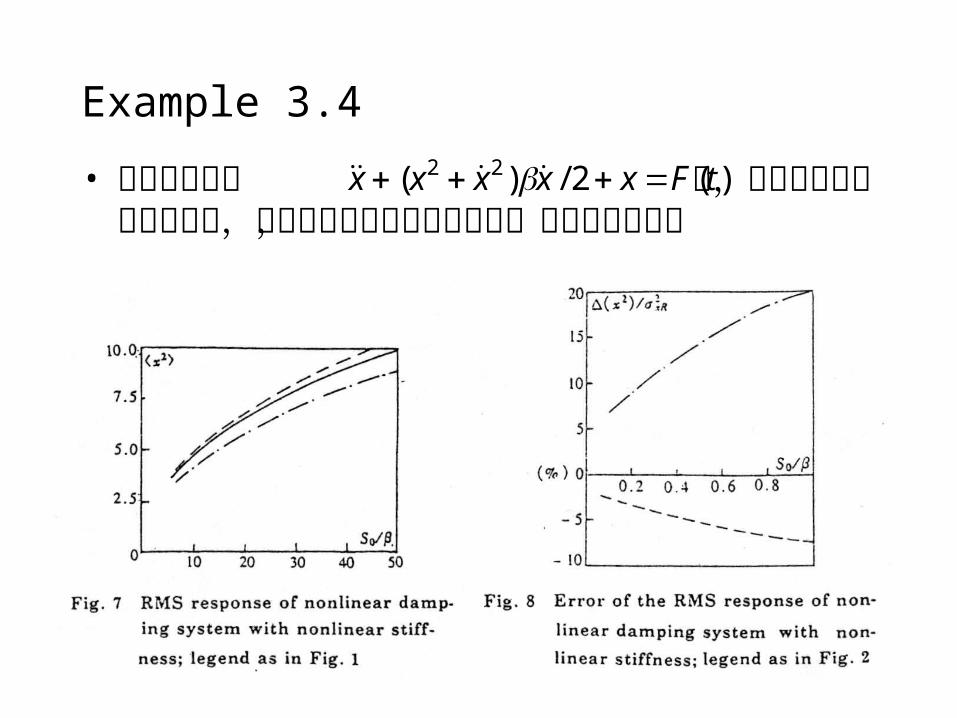
Example 3.4
• 最後當系統為 時,雖然結果比等價線性法好,但就高度非線性的問題而言,誤差仍然相當大
)(2/)( 22 tFxxxxx
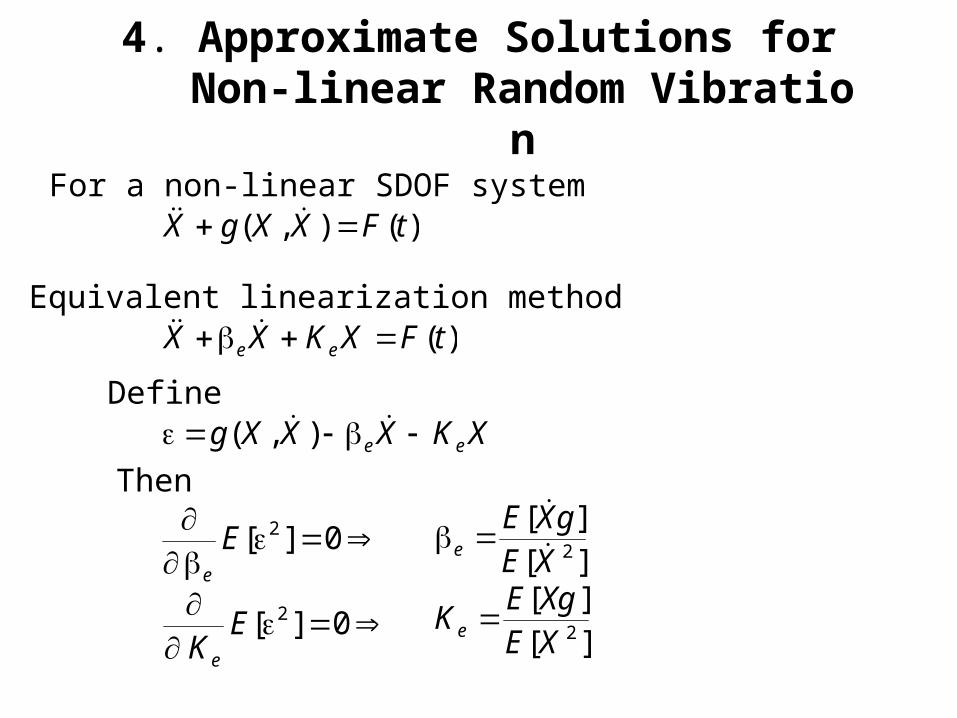
4. Approximate Solutions for Non-linear Random Vibration
)(),( tFXXgX
Equivalent linearization method)(tFXKXX ee
DefineXKXXXg ee ),(
0][
2Ee
Then
0][
2EKe
For a non-linear SDOF system
][][
2XEgXE
e
][][
2XEXgE
Ke
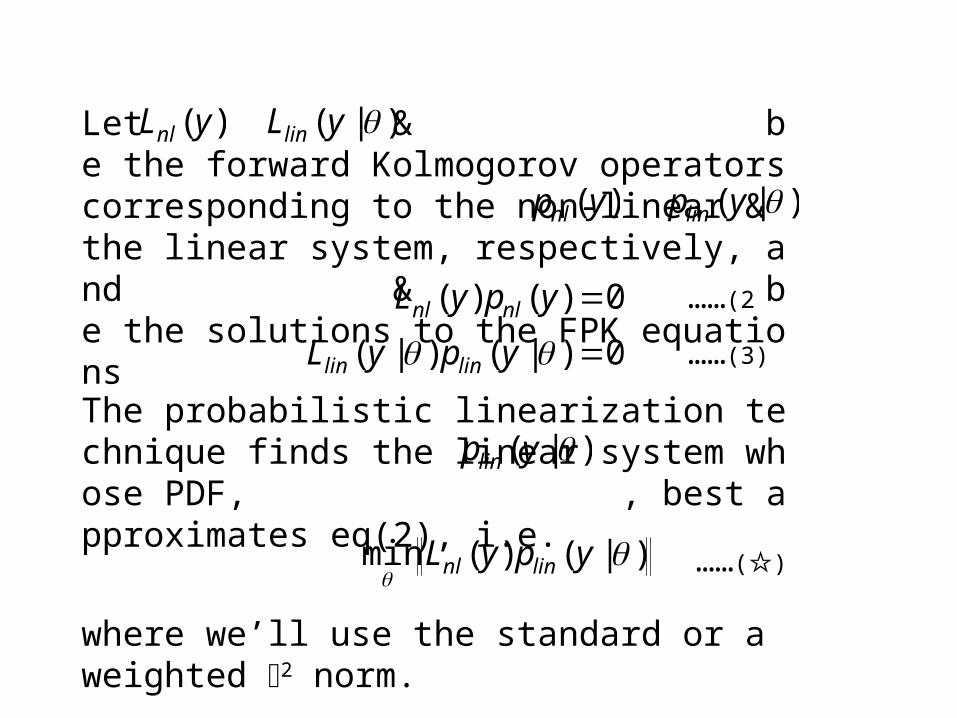
Let & be the forward Kolmogorov operators corresponding to the non-linear & the linear system, respectively, and & be the solutions to the FPK equations
)( yLnl )|( yLlin
)( ypnl )|( yplin
0)()( ypyL nlnl
0)|()|( ypyL linlin
The probabilistic linearization technique finds the linear system whose PDF, , best approximates eq(2), i.e.
)|( yplin
)|()(min
ypyL linnl
……(2
……(3)
where we’ll use the standard or a weighted 2 norm.
……( )☆
Given any two functions , : n, the standard 2 inner product of the functions is defined by
n
dyygyfgf )()(,
Similarly, given any weighting function , an inner product can be defined by
n
dyyygyfgf )()()(,
0)( y
The standard 2 norm of a function is fff ,2
2
and a weighted 2 norm can be defined by
fff ,2
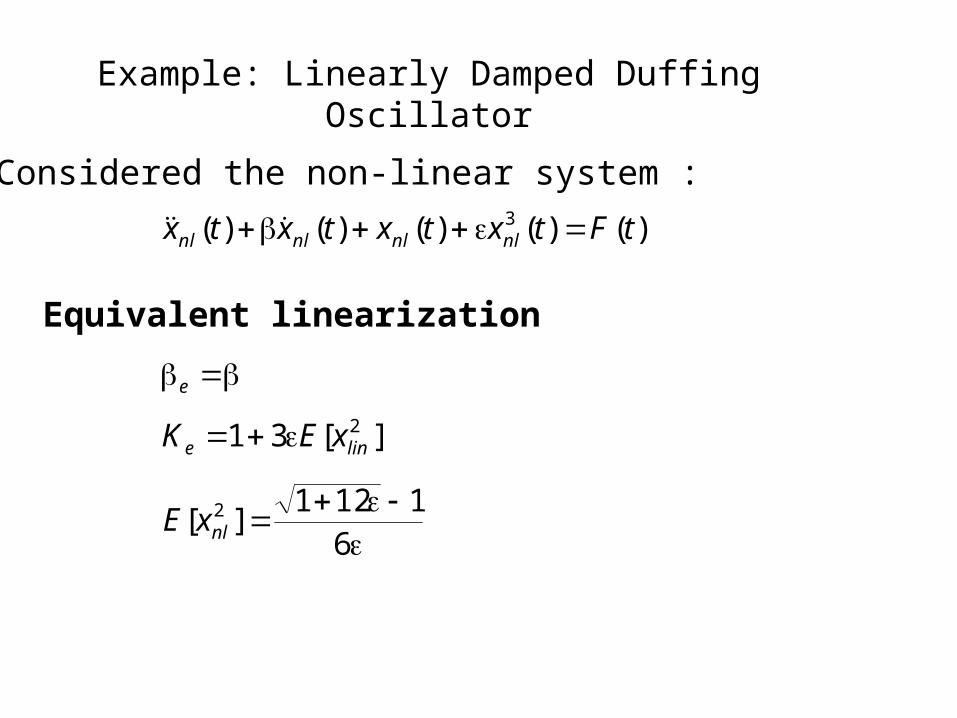
Example: Linearly Damped Duffing Oscillator
)()()()()( 3 tFtxtxtxtx nlnlnlnl
Considered the non-linear system :
Equivalent linearization
e
][31 2line xEK
61121
][ 2nlxE
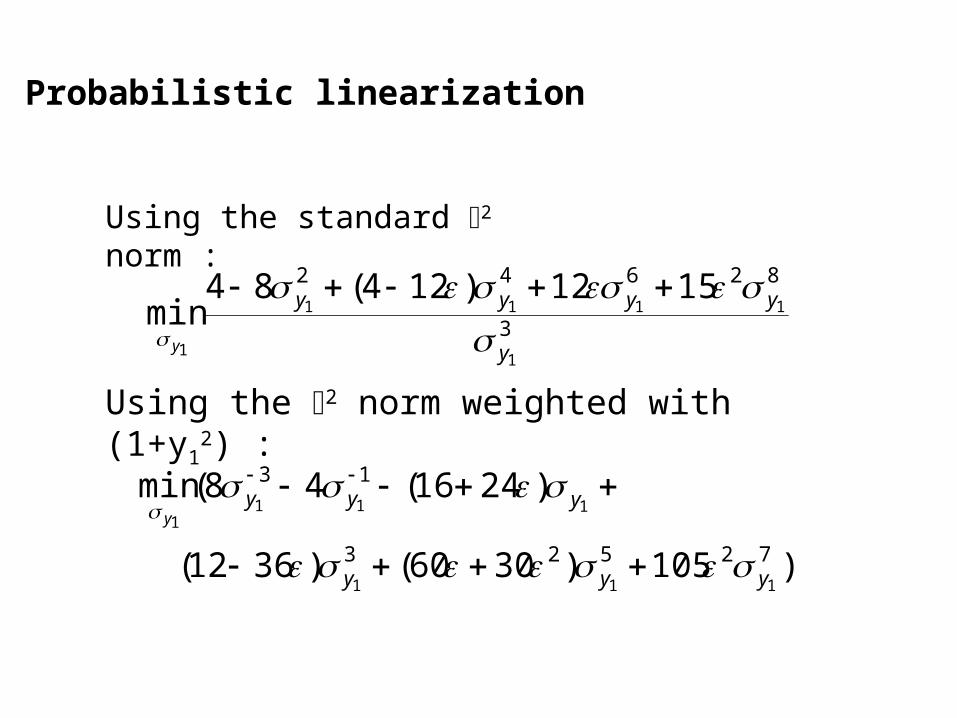
Using the standard 2 norm :
3
82642
1
1111
1
1512)124(84min
y
yyyy
y
Using the 2 norm weighted with (1+y12) :
111
1
)2416(48(min 13yyy
y
)105)3060()3612( 72523
111 yyy
Probabilistic linearization
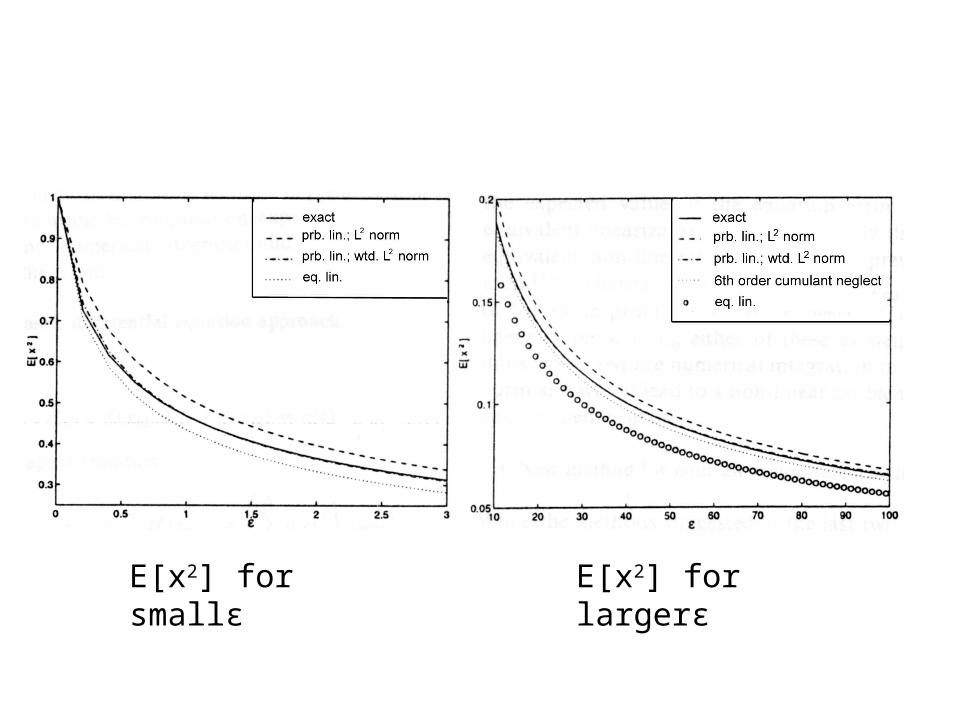
E[x2] for smallε E[x2] for largerε
5. Equivalent Linearinzation Method for MDOF Systems
•Consider a non-linear MDOF system
where M,C,K denote constant nxn matrices is a non-linear n-vector F is a non-linear n-vector of excitation
•The equivalent linear system is
where Me,Ke,Ce are deterministic matrices.
)(),,( tFxxxΦxxx KCM
)(),,()()()( tFxxxΦxxx eee KKCCMM
•Define the error
•Minimize the error min
If we let then we can derive
xxxxxxΦ
xxxxxxΦxxx
eee
eee
KCM
KKCCMMKCM
),,(
)()()(),,(
nixkxcxm jeijj
eij
n
jj
eijii ,...,1 )(
1
222
21 ... n
T
}])(Φ{[][ 2
1
2
n
jj
eijj
eijj
eijiii xkxcxmEED
n
sjs
eisjs
eisjs
eisije
ij
i
n
sjs
eisjs
eisjs
eisije
ij
i
n
sjs
eisjs
eisjs
eisije
ij
i
xxEkxxEcxxEmxEk
D
xxEkxxEcxxEmxEc
D
xxEkxxEcxxEmxEm
D
1
2
1
2
1
2
])[][][(][0
])[][][(][0
])[][][(][0
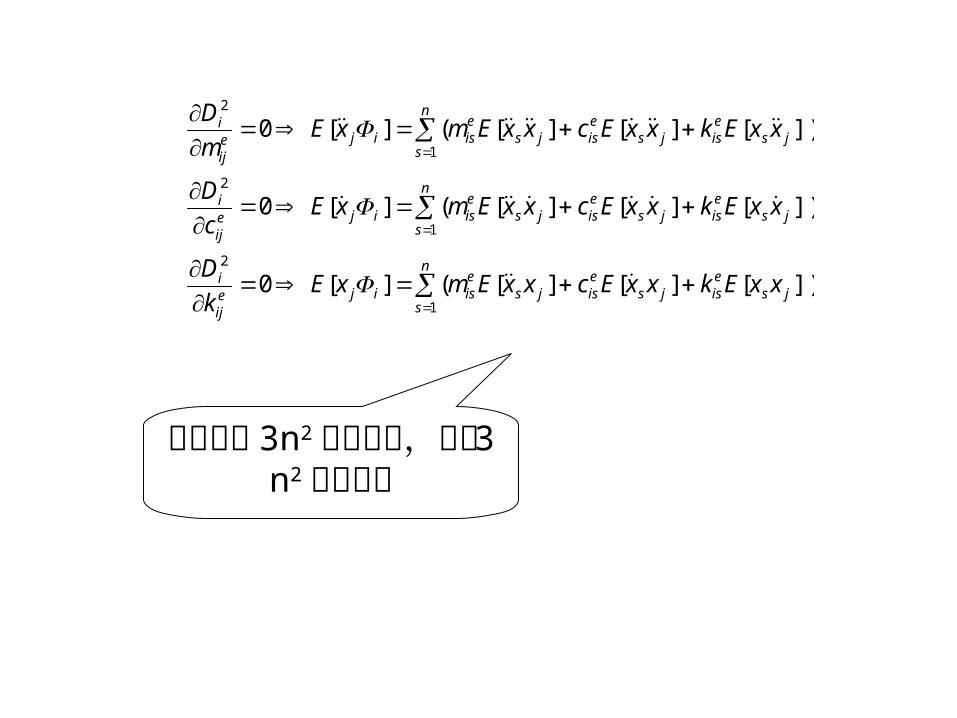
上式共有 3n2 個未知數,也有 3n2 個未知
數
•When the excitation is Gaussian
•This set of non-linear equations must be solved iteratively. For instance, the procedures can be ini- tialized by neglecting and solving
][k ][c ][j
ieij
j
ieij
j
ieij x
Ex
Ex
Em
)(tFxxx KCM


















