Nonlinear vibration
25
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT INDIAN INSTITUTE OF TECHNOLOGY ROORKEE INDIAN INSTITUTE OF TECHNOLOGY ROORKEE Dr. S. P. Harsha Dr. S. P. Harsha Nonlinear Vibrations Nonlinear Vibrations
description
Non Linear vibration
Transcript of Nonlinear vibration
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
Nonlinear VibrationsNonlinear Vibrations
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
1. The behavior of a nonlinear system is governed by a nonlinear differential equation. Exact solutions do not exist for many nonlinear differential equations.2. A nonlinear system may have more than one equilibrium point. An equilibrium point may be stable or unstable.3. Steady state behavior, if it exists for a nonlinear system, is dependent upon initial conditions.
LINEAR v/s NONLINEAR SYSTEMSLINEAR v/s NONLINEAR SYSTEMS
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
4. The period of free vibration of a nonlinear system is dependent upon initial conditions. This implies that the frequency of free vibration is dependent upon the free vibration amplitude.5. A nonlinear system exhibits resonance at excitation frequencies different from the system's linear natural frequency. A super-harmonic resonance exists in a system with a cubic nonlinearity when the excitation frequency is one third of the system's linear natural frequency. A sub-harmonic resonance exists when the excitation frequency is nearly three times the system's linear natural frequency
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
6. The principle of linear superposition cannot be used to analyze a nonlinear system subject to a multi-frequency excitation. A combination resonance can exist for appropriate combinations of excitation frequencies. 7. Internal resonances can exist in multi-degree-of-freedom and continuous systems for appropriate combinations of natural frequencies.8. A periodic excitation may lead to a non-periodic response in a nonlinear system. Such chaotic motion occurs in many nonlinear systems for certain parameter values.
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
MotivationMotivation
• Every engineering system is nonlinear …Every engineering system is nonlinear …
• Linearization is not robust and global … Linearization is not robust and global …
• Increasing demand for refinement, accuracy & Increasing demand for refinement, accuracy &
performance …performance …
• Nonlinear phenomena cannot be predicted Nonlinear phenomena cannot be predicted
even qualitatively by linear analysis …even qualitatively by linear analysis …
• Need optimized solutions – low cost & high Need optimized solutions – low cost & high
performanceperformanceNonlinear AnalysisNonlinear Analysis
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
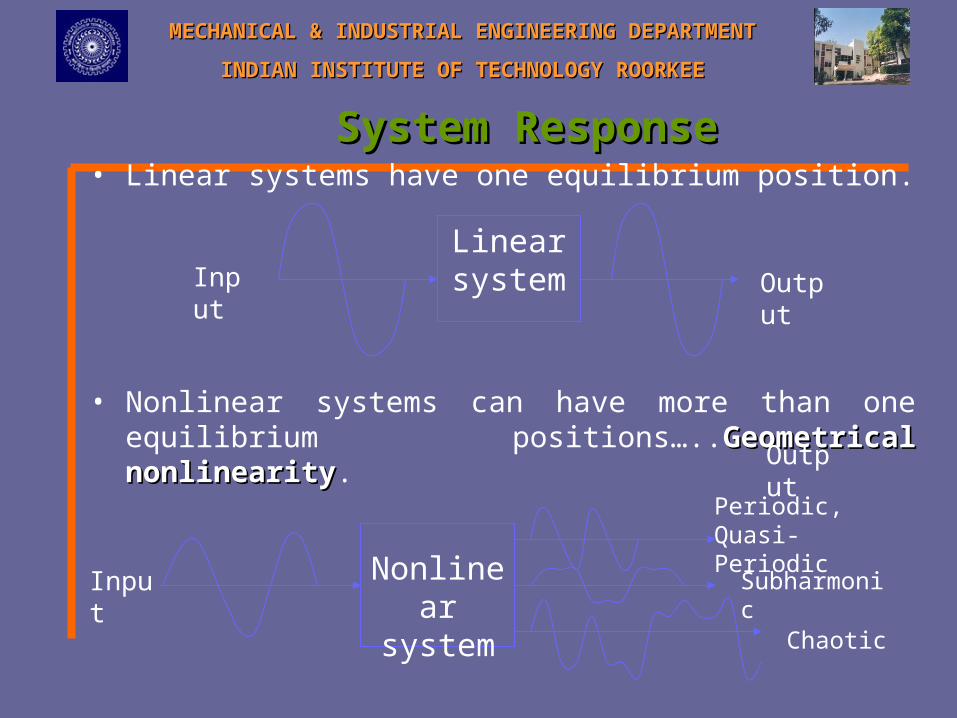
System ResponseSystem Response• Linear systems have one equilibrium position.
• Nonlinear systems can have more than one equilibrium positions…..Geometrical nonlinearityGeometrical nonlinearity.
LinearsystemInput Output
Periodic, Quasi-Periodic
Nonlinearsystem
Subharmonic
Chaotic
Input
Output
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
(a)multiple steady state solutions, some stable and some unstable, in response to the same inputs,
(b)jump phenomena, involving discontinuous and significant changes in the response of the system as some forcing parameter is slowly varied,
(c) response at frequencies other than the forcing frequency,
(d) internal resonances, involving different parts of the system vibrating at different frequencies, all with steady amplitudes (the frequencies are usually in rational ratios, such as 1:2, 1:3, 3:5, etc.),
(e) self sustained oscillations in the absence of explicit external periodic forcing, and
(f) complex, irregular motions that are extremely sensitive to initial conditions (chaos).
Nonlinear systems can display behaviors that linear systems cannot. These include:
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
Analysis techniquesThree broad categories of techniques for
analyzing nonlinear systems are:(a) heuristic techniques like Galerkin
methods, including harmonic balance(b) asymptotic techniques, including the
methods of averaging and multiple scales, and
(c) rigorous mathematical results about dynamical systems
(d) Numerical tech.,
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
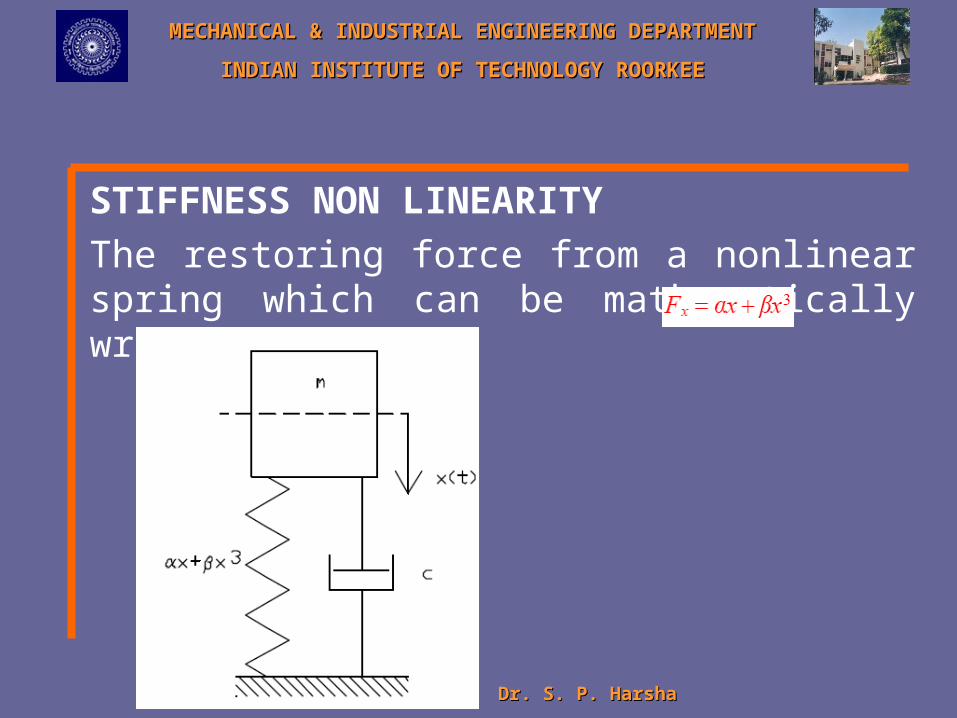
STIFFNESS NON LINEARITY
The restoring force from a nonlinear spring which can be mathematically written as
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
STIFFNESS NON LINEARITY
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
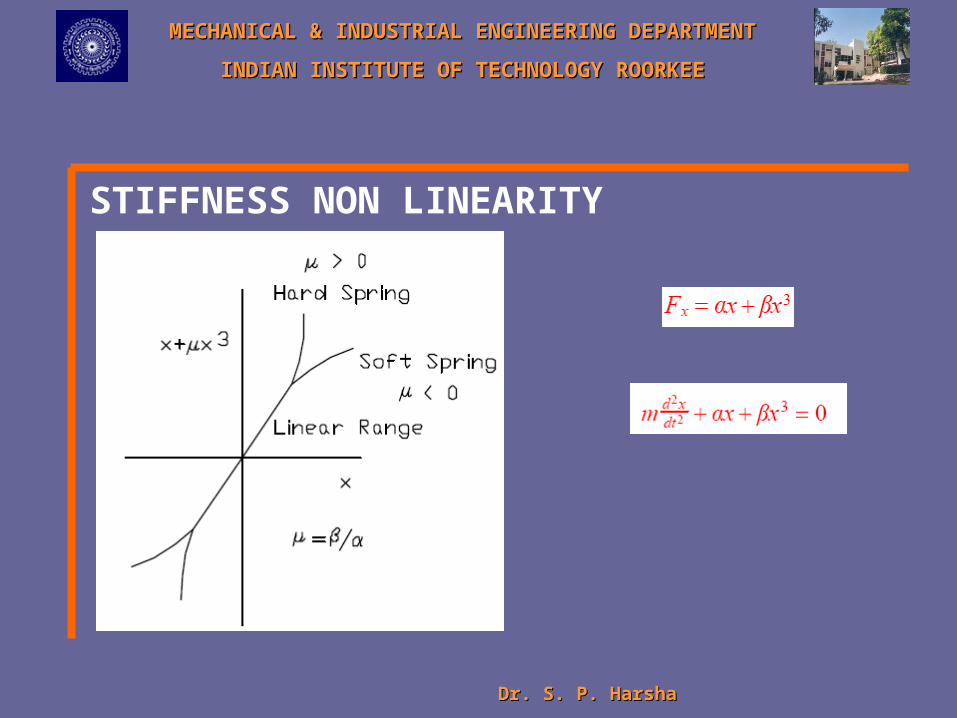
STIFFNESS NON LINEARITY
For nonlinear stiffness systems, the free vibratory response contains higher harmonics.
For hardening systems, > 0, the frequency increases with the amplitude of vibration, i.e., the time period for one free swing decreases with amplitude of vibration.
For softening systems, < 0, the frequency decreases with the amplitude of vibration, i.e., the time period for one free swing increases with amplitude of vibration.
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
Graphical method: The phase plane• The state plane or phase plane is a plot of velocity versus displacement during the history of motion. • The nature and stability of equilibrium points can be examined from linearizing the governing differential equation in the vicinity of the equilibrium point.
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
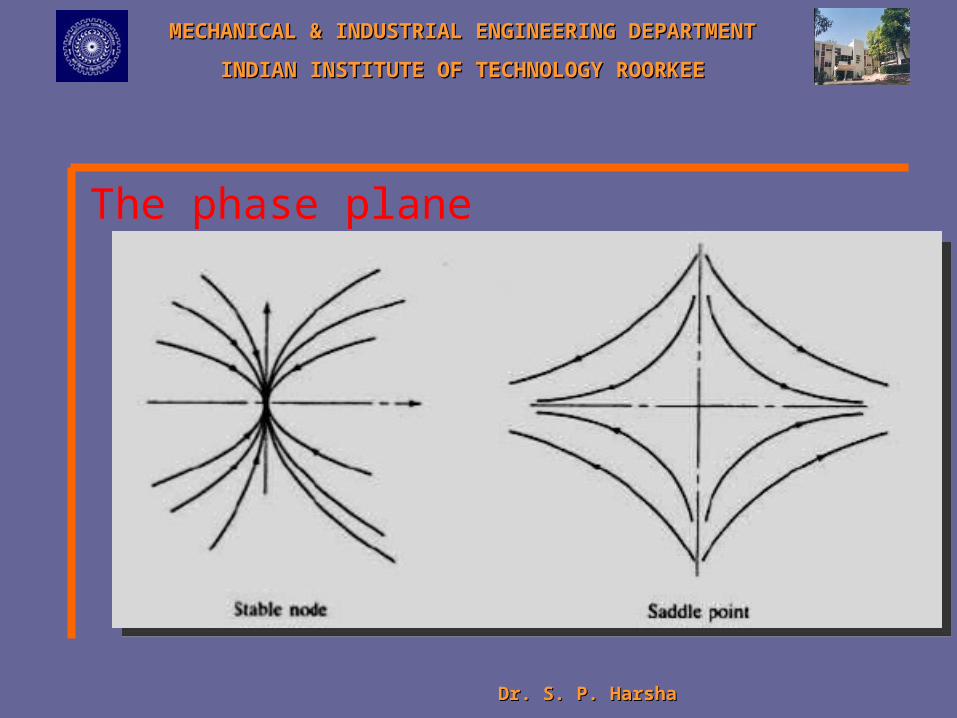
The phase plane
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
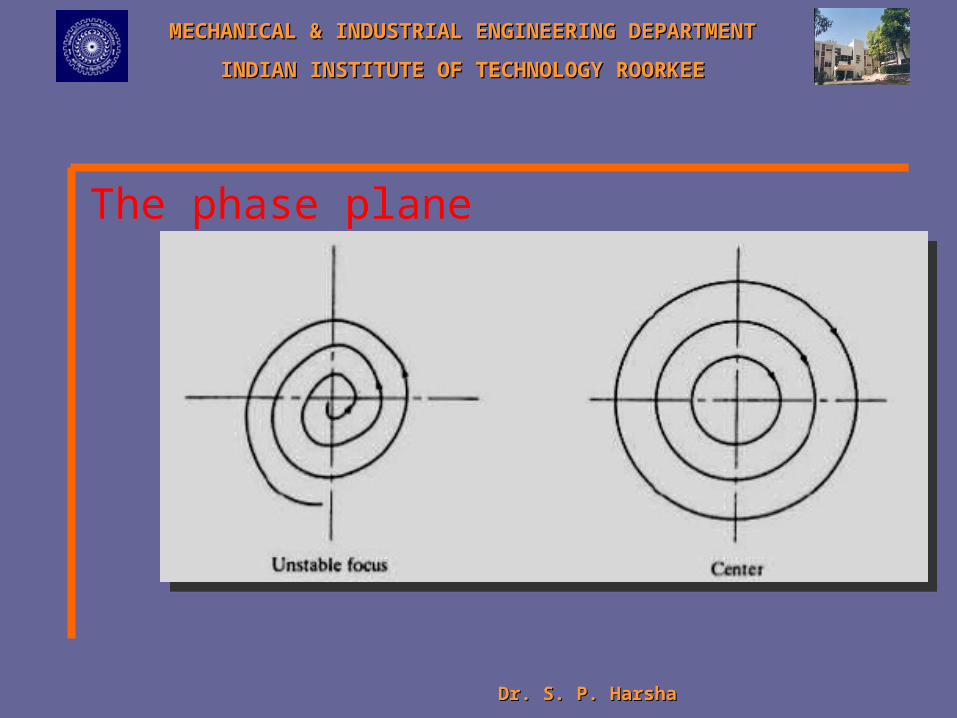
The phase plane
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
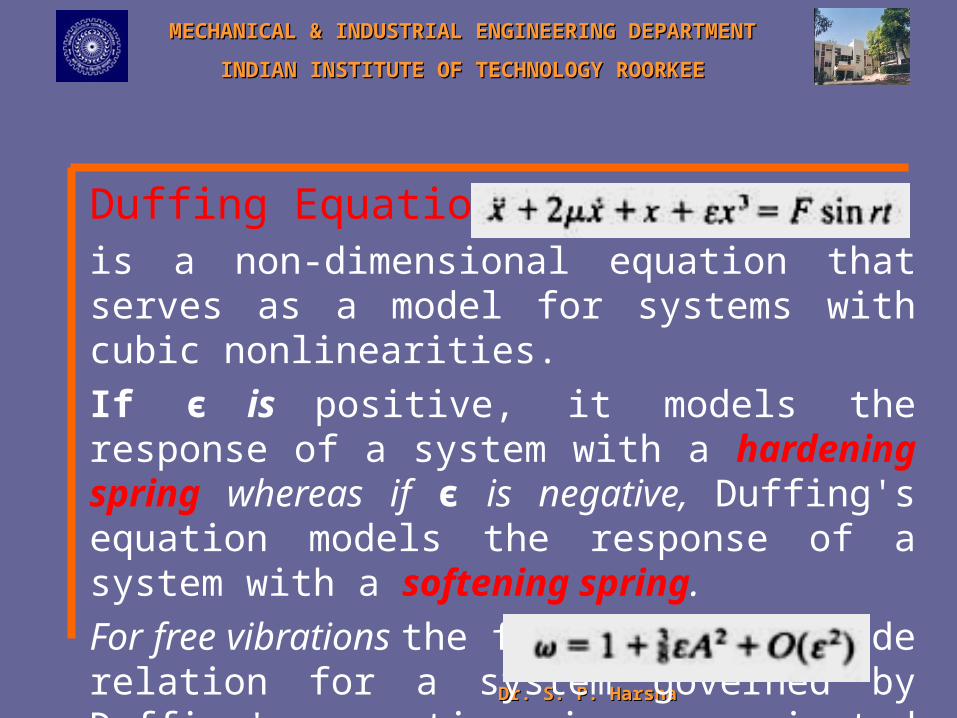
Duffing Equations:is a non-dimensional equation that serves as a model for systems with cubic nonlinearities.If є is positive, it models the response of a system with a hardening spring whereas if є is negative, Duffing's equation models the response of a system with a softening spring. For free vibrations the frequency amplitude relation for a system governed by Duffing's equation is approximated using a perturbation method as
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
where is the non-dimensional natural frequency ( = 1 for a linear system) and A is the amplitude. The forced response of Duffing's equation is analyzed near resonance by assuming
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
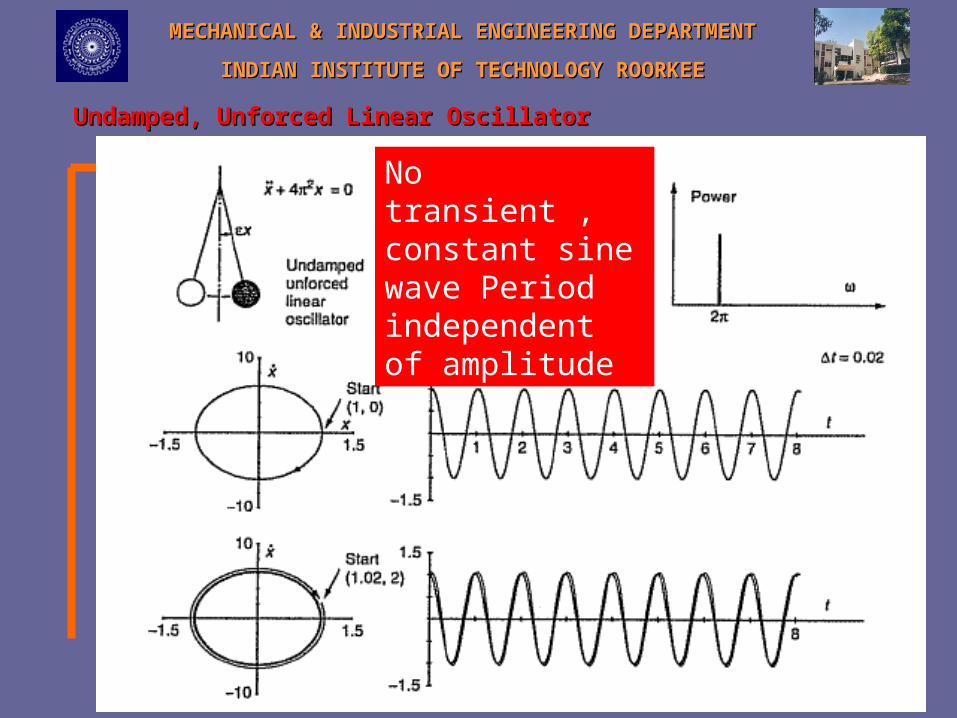
Undamped, Unforced Linear Oscillator Undamped, Unforced Linear Oscillator
No transient , constant sine wave Period independent of amplitude
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
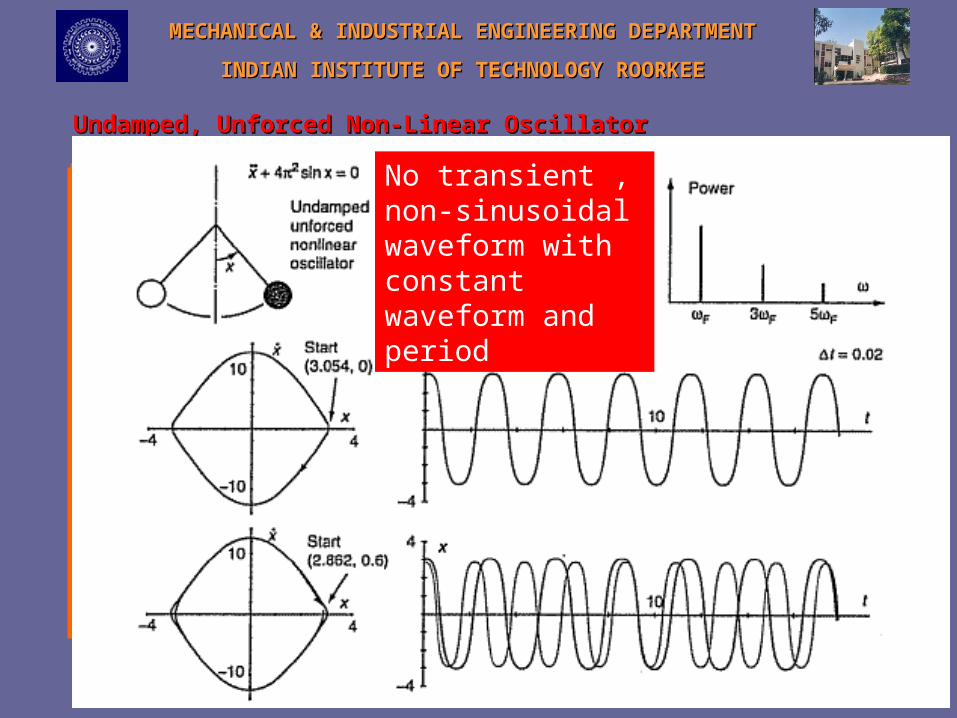
Undamped, Unforced Non-Linear Oscillator Undamped, Unforced Non-Linear Oscillator
No transient , non-sinusoidal waveform with constant waveform and period
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
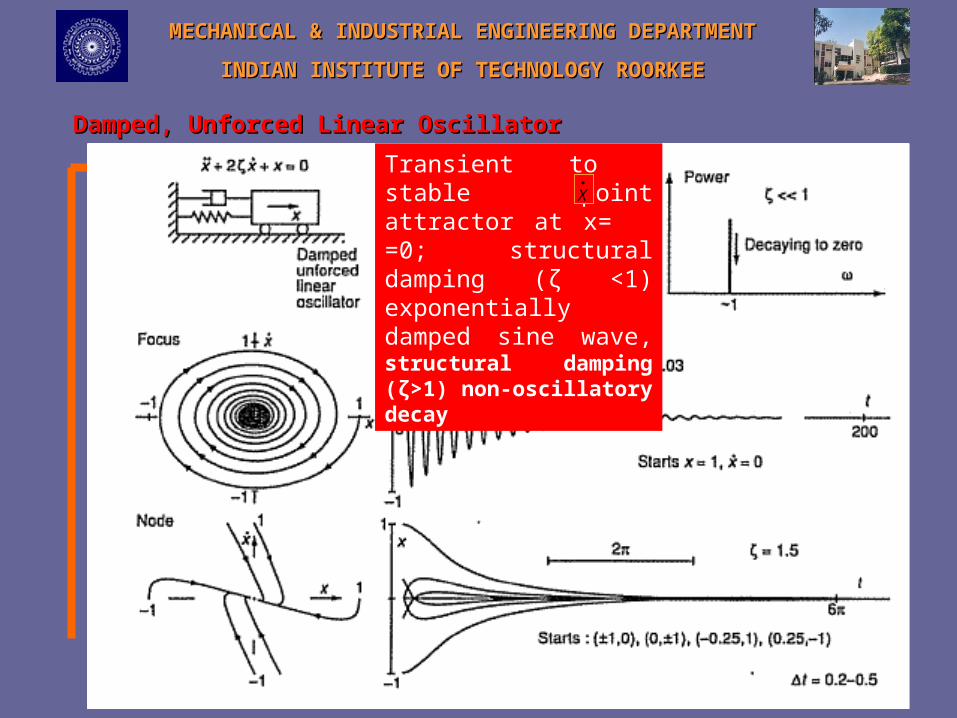
Damped, Unforced Linear Oscillator Damped, Unforced Linear Oscillator
Transient to stable point attractor at x= =0; structural damping (ζ <1) exponentially damped sine wave, structural damping (ζ>1) non-oscillatory decay
X
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
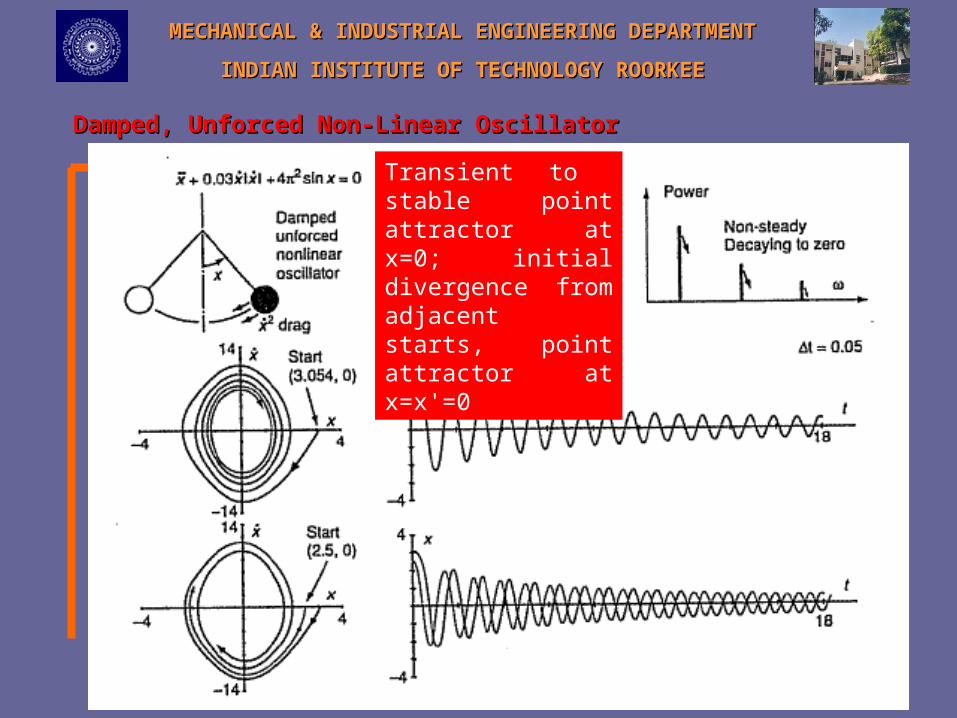
Damped, Unforced Non-Linear Oscillator Damped, Unforced Non-Linear Oscillator
Transient to stable point attractor at x=0; initial divergence from adjacent starts, point attractor at x=x'=0
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
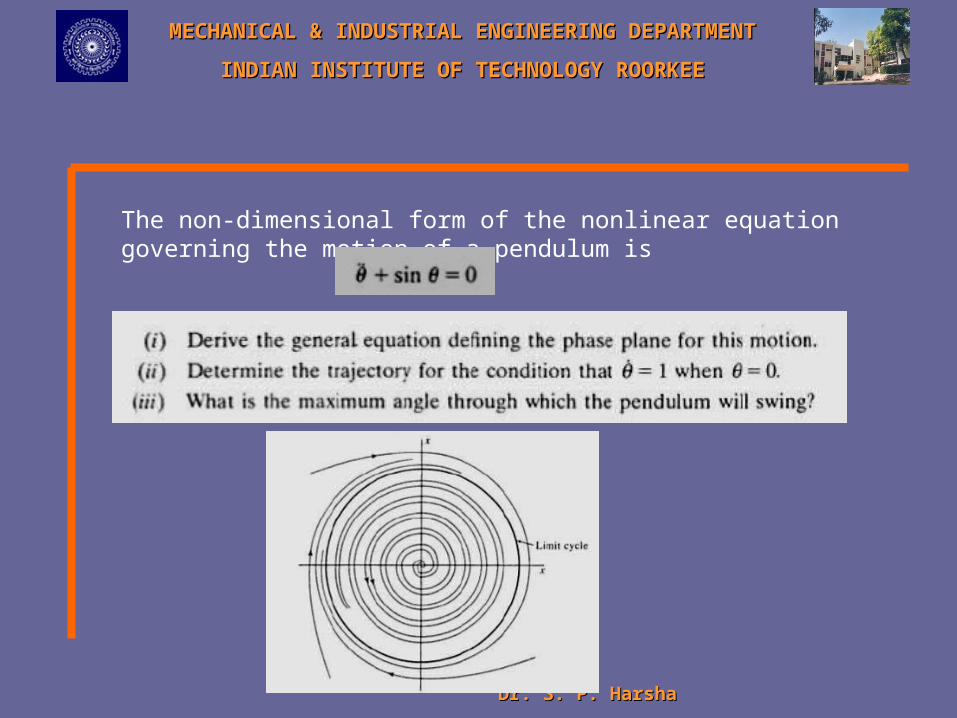
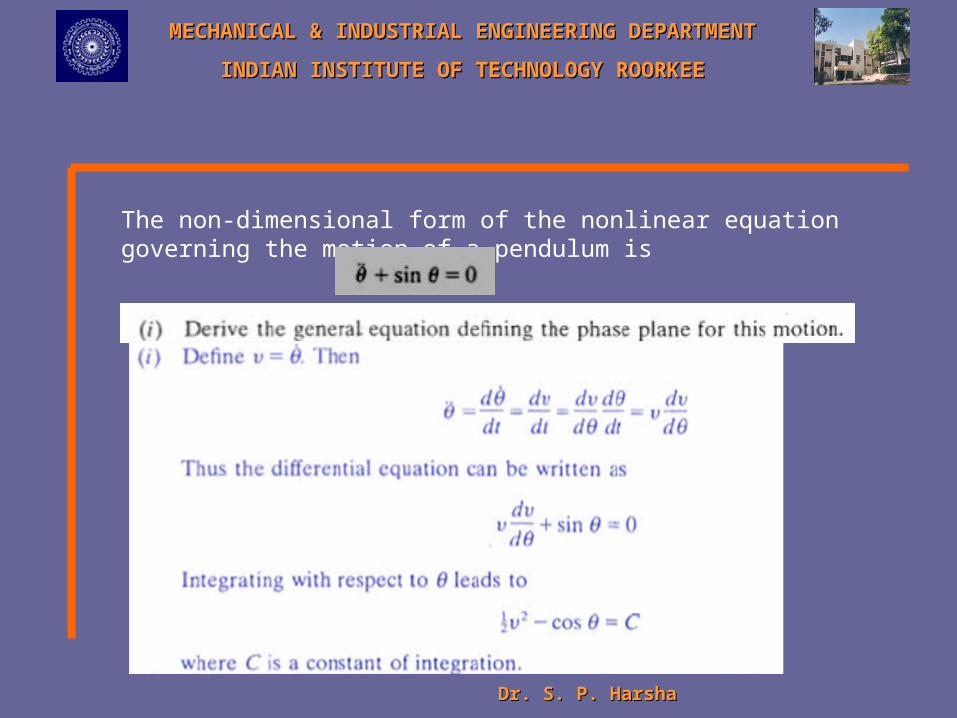
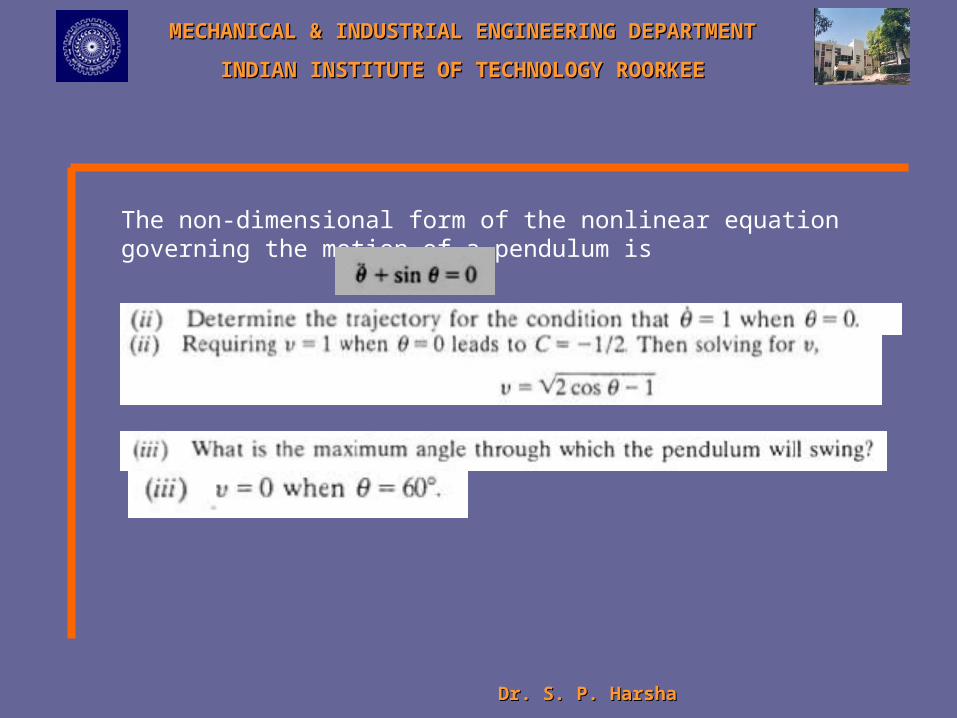
The non-dimensional form of the nonlinear equation governing the motion of a pendulum is
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
The non-dimensional form of the nonlinear equation governing the motion of a pendulum is
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
The non-dimensional form of the nonlinear equation governing the motion of a pendulum is
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha
Q. 1 Develop the general equation for the trajectory in the phase plane for a system governed by
MECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENTMECHANICAL & INDUSTRIAL ENGINEERING DEPARTMENT
INDIAN INSTITUTE OF TECHNOLOGY ROORKEEINDIAN INSTITUTE OF TECHNOLOGY ROORKEE
Dr. S. P. HarshaDr. S. P. Harsha