cargador frontal
56
RENR2170-02 November 2001 Systems Operation 988G Wheel Loader Electrohydraulic System BNH1-Up (Machine) 2TW1-Up (Machine)
-
Upload
rocky-diego-chegne-salazar -
Category
Documents
-
view
131 -
download
12
description
cat
Transcript of cargador frontal
-
RENR2170-02November 2001
Systems Operation988G Wheel LoaderElectrohydraulic SystemBNH1-Up (Machine)2TW1-Up (Machine)
-
i01097883
Important Safety InformationMost accidents that involve product operation, maintenance and repair are caused by failure toobserve basic safety rules or precautions. An accident can often be avoided by recognizing potentiallyhazardous situations before an accident occurs. A person must be alert to potential hazards. Thisperson should also have the necessary training, skills and tools to perform these functions properly.
Improper operation, lubrication, maintenance or repair of this product can be dangerous andcould result in injury or death.Do not operate or perform any lubrication, maintenance or repair on this product, until you haveread and understood the operation, lubrication, maintenance and repair information.Safety precautions and warnings are provided in this manual and on the product. If these hazardwarnings are not heeded, bodily injury or death could occur to you or to other persons.
The hazards are identified by the Safety Alert Symbol and followed by a Signal Word such asDANGER, WARNING or CAUTION. The Safety Alert WARNING label is shown below.
The meaning of this safety alert symbol is as follows:
Attention! Become Alert! Your Safety is Involved.The message that appears under the warning explains the hazard and can be either written orpictorially presented.
Operations that may cause product damage are identified by NOTICE labels on the product and inthis publication.
Caterpillar cannot anticipate every possible circumstance that might involve a potential hazard. Thewarnings in this publication and on the product are, therefore, not all inclusive. If a tool, procedure,work method or operating technique that is not specifically recommended by Caterpillar is used,you must satisfy yourself that it is safe for you and for others. You should also ensure that theproduct will not be damaged or be made unsafe by the operation, lubrication, maintenance orrepair procedures that you choose.The information, specifications, and illustrations in this publication are on the basis of information thatwas available at the time that the publication was written. The specifications, torques, pressures,measurements, adjustments, illustrations, and other items can change at any time. These changes canaffect the service that is given to the product. Obtain the complete and most current information beforeyou start any job. Caterpillar dealers have the most current information available. For a list of the mostcurrent publication form numbers available, see the Service Manual Contents Microfiche, REG1139F.
When replacement parts are required for thisproduct Caterpillar recommends using Caterpil-lar replacement parts or parts with equivalentspecifications including, but not limited to, phys-ical dimensions, type, strength and material.
Failure to heed this warning can lead to prema-ture failures, product damage, personal injury ordeath.
-
3Electrohydraulic System
Table of Contents
Table of Contents
Systems Operation SectionGeneral Information .............................................. 4Electrohydraulic System Components .................. 5Electronic Control System Components ............... 11Pilot Hydraulic System .......................................... 17Main Hydraulic System ......................................... 23Pump Control Operation ....................................... 27Hydraulic System Operation ................................. 31Ride Control System ............................................. 45Hydraulic Fan System ........................................... 48
Index SectionIndex ..................................................................... 53
-
4Electrohydraulic SystemSystems Operation Section
Systems Operation Sectioni01278794
General InformationSMCS Code: 5050
Color Codes for Illustrations
g00669358Illustration 1
(A) Red color .............. Main pump system pressure
(B) Red stripes .. First reduction of system pressure
(C) Red dots .. Second reduction of system pressure
(D) Orange color ................................ Pilot pressure
(E) Orange stripes .. First reduction of pilot pressure
(F) Orange dots .. Second reduction of pilot pressure
(G) Green color .......................... Suction line, returnline, case drain and tank oil
(H) Blue color ......................................... Blocked oil
(I) Yellow color .............. Moving parts and activatedvalve envelopes
(J) Light gray color .............................. Surface area
-
5Electrohydraulic System
Systems Operation Section
i01640360
Electrohydraulic SystemComponentsSMCS Code: 1400; 5050
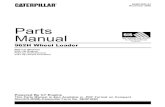
g00848419Illustration 2Hydraulic Schematic for Implement System(1) Implement lockout switch. (2) Kickout set switch. (3) Loose material switch. (4) Tilt linkage position sensor. (5) Caterpillar data link. (6)Electronic Control Module (ECM). (7) Lift linkage position sensor. (8) Detent coil for the bucket kickout. (9) Tilt lever sensor. (10) Raise kickoutdetent coil. (11) Lower kickout detent coil. (12) Lift lever sensor. (13) Pilot on/off solenoid valve. (14) Solenoid for the pilot control actuator. (15)Variable pump solenoid valve. (16) Lift cylinder. (17) Tilt cylinder. (18) Shuttle valve. (19) Pressure reducing valve. (20) Implement control valve.(21) Ball valve. (22) Check valve. (23) Pilot relief valve. (24) Pilot/brake pump. (25) Main relief valve. (26) Implement pump. (27) Hydraulic tank.
The electrohydraulic implement system has a pilothydraulic system and a main hydraulic system.The pilot system controls the functions of the maincontrol valve. The pilot system consists of theelectronic system and the pilot hydraulic system.
The electronic system includes the followingcomponents : implement ECM, tilt linkage positionsensor, lift linkage position sensor, detent coil forthe bucket kickout, raise kickout detent coil, lowerkickout detent coil, implement lockout switch, loosematerial switch, kickout set switch, pilot on/offsolenoid valve, and pilot control actuators.
The pilot hydraulic system consists of the followingcomponents:pilot/brake pump, pump control valve,pilot relief valve, pilot on/off solenoid valve, ballvalve, and pilot control actuators.
The main hydraulic system consists of the followingcomponents: implement pump, solenoid valve forthe implement pump, main relief valve, main controlvalve, lift cylinders, and tilt cylinder.
The hydraulic tank is common to the followingsystems: implement system, steering system, andhydraulic brake system.
-
6Electrohydraulic SystemSystems Operation Section
When the implement lockout switch is in the ONposition, the ECM energizes the pilot on/off solenoidvalve. The solenoid opens the valve which allowspilot oil from the pilot/brake pump to flow to the pilotcontrol actuators. The pilot control actuators arelocated on each end of the control valve spools.
When an implement control lever is moved, the leverposition sensor sends a PWM signal to the ECM.The ECM analyzes the sensor signal and the signalfrom the lift linkage position sensor or the tilt linkageposition sensor. Then, the ECM sends a proportionalsignal in order to energize the solenoid for the pilotcontrol actuator. The solenoid moves the spool forthe pilot control actuator which directs pilot oil fromthe main control valve spool to the tank.
The spool for the main control valve shifts. Thisdirects implement pump oil to the lift cylinders ortilt cylinder.
g00848420Illustration 3Component Locations(4) Tilt linkage position sensor. (6) Implement Electronic Control Module (ECM). (7) Lift linkage position sensor. (13) Pilot on/off solenoid valve.(16) Lift cylinder. (17) Tilt cylinder. (20) Implement main control valve. (23) Pilot relief valve. (24) Pilot/brake pump. (26) Implement pump. (27)Hydraulic tank. (28) pump control valve. (29) Electrohydraulic control.
-
7Electrohydraulic System
Systems Operation Section
This graphic shows the locations of the majorcomponents in the electro-hydraulic implementsystem.
The electronic system components are implementelectronic control module (6), electrohydrauliccontrol (29), lift linkage position sensor (7), and tiltlinkage position sensor (4).
The electrohydraulic control (29) consists of thefollowing components: lift lever position sensor, tiltlever position sensor, tilt control position sensor,detent coil for the bucket kickout, lower kickoutdetent coil, raise kickout detent coil, and implementlockout switch. The loose material switch andthe kickout set switch are located on the leftoverhead console in the cab. The variable pumpsolenoid valve is located on the control valve forthe implement pump . The solenoids for the pilotcontrol actuators are located on the pilot controlactuators. Pilot on/off solenoid (13) is located on thepilot on/off solenoid valve.
The pilot hydraulic system consists of pilot/brakepump (24), and pilot relief valve (23). Also, twocomponents from implement main control valve (20)are part of the pilot hydraulic system: pilot controlactuator and pilot on/off solenoid valve (13).
The main hydraulic system consists of the followingcomponents: implement pump (26), implementpump control valve (28), implement main controlvalve (20), tilt cylinder (17), lift cylinders (16), andimplement hydraulic tank (27).
The hydraulic tank is located below the operatorplatform on the right side of the machine.
g00686096Illustration 4Access Area Behind The Cab(24) Pilot/brake pump. (26) Implement pump. (30) Pump drive. (31)Pump output line.
The implement pump (26) is a variable displacementpiston pump that is mounted to the pump drive atthe rear of the engine.
Oil flows from the hydraulic tank through a suctionline on the bottom of the pump. Then, the oil flowsthrough the pump supply line (31) to the implementcontrol valve.
The pilot/brake pump (24) is mounted to the pumpdrive opposite the implement pump. The pilot/brakepump supplies oil flow to the following systems:brake hydraulic system, pilot oil to the implementhydraulic system, and steering system.
g00686124Illustration 5Shuttle Valve(15) Solenoid valve for the implement pump. (33) Shuttle valve.(34) Control valve for the implement pump. (35) Pressure sensorfor measuring the output of the implement pump. (36) Analog todigital converter. (37) Pressure tap for pump output .
The shuttle valve is mounted on the implementpump. The shuttle valve contains two check balls.The shuttle valve directs oil from the pilot/brakepump and the implement pump. The higherpressure oil will unseat one of the check balls. Thishigher pressure oil is directed to the pump controlvalve and to the small end of the pump actuator.
The pump control valve (34) is mounted on theimplement pump. The pump control valve directssignal oil from the shuttle valve to the pumpactuator. The pump actuator controls the pumpswashplate angle.
The variable pump solenoid valve (15) controls pilotoil to the pump control valve.
The sensor for pump supply pressure (35) sends apressure signal to the implement ECM. This sensoruses an analog to digital converter. The analog todigital converter (36) converts the analog signalto a Pulse Width Modulated signal (PWM) for theimplement ECM.
The pressure tap (37) that is located on the shuttlevalve is used to check pump output pressure.
-
8Electrohydraulic SystemSystems Operation Section
g00686146Illustration 6Case Drain Filters (If equipped)(38) Case drain filter for the fan pump. (39) Case drain filter for theimplement pump. (40) Case drain filter for the steering pump.
The case drain filter for the fan pump (38), thecase drain filter for the implement pump (39), andthe case drain filter for the steering pump (40) arelocated above the pump drive.
g00686157Illustration 7Pilot Control Actuators(14) Solenoid for the pilot control actuator. (20) Implement controlvalve. (25) Implement main relief valve. (41) Pilot control actuator.(42) Rod end line relief valve for the lift cylinder. (43) Rod end linerelief valve for the tilt cylinder.
The implement control valve (20) is located insidethe front frame below the lift arm. The implementcontrol valve directs implement pump oil to the liftcylinders and tilt cylinders. The main relief valve(25) limits pressure in the implement hydraulicsystem to approximately 31000 kPa (4500 psi).
The pilot control actuators (41) control the movementof the implement valve spools.
When the operator moves a control lever, the leverposition sensor sends a pulse width modulatedsignal (PWM) to the implement ECM. The ECManalyzes the signals from the lever position sensor,the lift linkage position sensor and the tilt linkageposition sensor. Then, the ECM sends a proportionalsignal in order to energize the solenoid for the pilotcontrol actuator (14).
The rod end line relief valves for the lift cylinder (42)and the tilt cylinder (43) are also shown.
g00686159Illustration 8Front Frame(21) Ball valve. (44) Stem.
The ball valve (21) is used to lower the lift armin the event of a dead engine and the implementelectronics are not operational. High pressure oilfrom the head end of the lift cylinders flows throughthe pressure reducing valve to the ball valve. Theball valve directs this oil to the tank. To lower thelift arm, turn the stem (44) on the bottom of theball valve. For more information, refer to HydraulicSystem Operation, Manual Lowering.
g00686164Illustration 9Implement Control Valve
The following components are visible on theimplement control valve:
-
9Electrohydraulic System
Systems Operation Section
(19) Pressure reducing valve.
(25) Main relief valve.
(42) Rod end line relief valve for the lift cylinder.
(43) Rod end line relief valve for the tilt cylinder.
(45) Pilot control actuator and solenoid valve(DUMP).
(46) Pilot control actuator and solenoid valve (TILTRACKBACK).
(47) Pilot control actuator and solenoid valve(RAISE).
(48) Pilot control actuator and solenoid valve(LOWER).
(49) Head end line relief valve for the tilt cylinder.
(50) Head end line relief valve for the lift cylinder.
(51) Float sequence valve.
(52) Pressure tap for the rod end of the lift cylinder.
(53) Pressure tap for the head end of the lift cylinder.
g00686166Illustration 10Hydraulic Tank(27) Hydraulic tank. (54) Sight gauge.
The hydraulic tank (27) is located on the rightside of the machine below the operator platform.The sight gauge (54) is mounted on the tank. Thesight gauge is at a level that enables the operatorto check the hydraulic fluid while the operator isstanding next to the machine.
g00686172Illustration 11Right Side of Machine(23) Pilot relief valve. (27) Hydraulic tank. (55) Pilot filter. (56)Breaker relief valve. (57) Oil filler tube.
The pilot relief valve (23) is located on the frontof the hydraulic tank (27). The pilot relief valvelimits the pressure in the pilot system to 1800 kPa(260 psi). The pilot filter (55) is located on the frontof the hydraulic tank above the pilot relief valve. Thebreaker relief valve (56) is located on the hydraulictank above the oil filler tube (57). The breaker reliefvalve prevents pressure from building up in thehydraulic tank. Also, the valve prevents a vacuumfrom forming as oil flows in and out of the hydraulictank.
g00686176Illustration 12Right Side of Front Frame(13) Pilot on/off solenoid valve. (58) Solenoid for the pilot on/offsolenoid valve.
The pilot on/off solenoid valve (13) is located onthe right side of the front frame near the articulationjoint. When the solenoid (58) for the pilot on/offsolenoid valve is energized, the pilot valve allows oilto flow from the pilot/brake valve to the implementcontrol valve and the pilot control actuators. Thepilot valve blocks pilot oil to the implement controlvalve when the valve is de-energized.
-
10Electrohydraulic SystemSystems Operation Section
g00686181Illustration 13Left Side of Front Frame(59) Ride control valve (If equipped). (60) Ride control solenoid(If equipped).
The ride control valve (59) is located on the leftside of the front frame below the implement valve.When the ride control solenoid (60) is energized,the ride control valve allows oil to flow from thehead end of the lift cylinders to the accumulator.The accumulator absorbs spikes from the pressurein the lift cylinder and hydraulic lines when themachine is roading.
Note: The ride control solenoid is controlled by thepower train ECM.
-
11Electrohydraulic System
Systems Operation Section
i01640384
Electronic Control SystemComponentsSMCS Code: 1400; 5050
g00848404Illustration 14Hydraulic Schematic for Implement System(1) Implement lockout switch. (2) Kickout set switch. (3) Loose material switch. (4) Tilt linkage position sensor. (5) Cat data link. (6) ElectronicControl Module (ECM). (7) Lift linkage position sensor. (8) Detent coil for the bucket kickout. (9) Tilt lever sensor. (10) Raise kickout detent coil.(11) Lower kickout detent coil. (12) Lift lever sensor. (13) Pilot on/off solenoid valve. (14) Solenoid for the pilot control actuator. (15) Variablepump solenoid valve. (16) Lift cylinder. (17) Tilt cylinder. (18) Shuttle valve. (19) Pressure reducing valve. (20) Implement control valve. (21) Ballvalve. (22) Check valve. (23) Pilot relief valve. (24) Pilot/brake pump. (25) Main relief valve. (26) Implement pump. (27) Hydraulic tank.
-
12Electrohydraulic SystemSystems Operation Section
g00679508Illustration 15Front of Machine(4) Tilt linkage position sensor. (7) Lift linkage position sensor. (16)Lift cylinder. (17) Tilt cylinder.
The lift cylinder (16) is connected between the frontframe and the boom. The lift linkage position sensor(7) is located on the front frame on the right side ofthe machine. The lift linkage position sensor sendsa PWM signal to the ECM that indicates the positionof the boom.
The tilt cylinder (17) is connected between the frontframe tower and the bucket control linkage. The tiltlinkage position sensor (4) is located on the bucketcontrol linkage on the right side of the machine. Thetilt linkage position sensor sends a PWM signal tothe ECM that indicates the position of the bucket.
g00680331Illustration 16Electronics Bay(6) Implement ECM. (28) Transmission ECM.
The implement ECM (6) is located below theoperator platform to the right of the cab.
g00680263Illustration 17Hydraulic Electronic Control(1) Implement lockout switch. (9) Tilt control lever. (12) Liftcontrol lever. (13) Hydraulic electronic control. (29) Payload storebutton. (30) Throttle lock set/decelerate button. (31) Throttle lockresume/accelerate button. (32) Horn button. (33) Reduced rimpullON/OFF switch.
The lift control lever (12) is located in the hydraulicelectronic control (13) which is in front of the rightarmrest at the operator station. The lift control leverhas four positions: FLOAT, LOWER, HOLD, andRAISE. In FLOAT, the lift control lever is fully forwardin the detent position.
The tilt control lever (9) is also located in thehydraulic electronic control. The tilt control lever hasthree positions: DUMP, HOLD, and TILT BACK.
The implement lockout switch (1) sends a signalto the ECM in order to electronically lock out theimplements. The ECM will de-energize the piloton/off solenoid valve. The implements will notrespond to movement of the control levers.
The following components are also shown in thisview : throttle lock set/decelerate button (30), throttlelock resume/accelerate button (31), horn button(32), and reduced rimpull ON/OFF switch (33).
-
13Electrohydraulic System
Systems Operation Section
g00682141Illustration 18Tilt Lever Sensor(9) Tilt lever position sensor.
The tilt lever position sensor (9) is located belowthe tilt lever. The sensor sends a PWM signal to theECM which indicates the position of the tilt lever.
g00682142Illustration 19Lift Lever Sensor(12) Lift lever position sensor.
The lift lever position sensor (12) is located belowthe lift lever. The sensor sends a PWM signal to theECM which indicates the position of the lift lever.
The duty cycle of the PWM signal is approximately50 percent when the levers are in the centeredposition.
g00682145Illustration 20Raise Kickout Detent Coil(8) Tilt lever detent coil.
The tilt lever detent coil (8) will hold the tilt lever inthe full TILT BACK position. The tilt lever will staydetented and the bucket will continue to tilt backuntil the bucket reaches the preset digging angle.The preset digging angle is set with the kickoutswitch.
The lift lever detent coil will hold the lift lever in theFLOAT position until the lever is moved out of thedetent. In the full raise and the full lower position,the lift lever is also detented. If the lift lever staysdetented, the lift arm will continue to raise or the liftarm will continue to lower until the lift arm reachesthe preset lift kickout height.
With the boom above horizontal and the lift lever inthe full lower position, the lever will stay in the detentposition until the preset dig position is reached.With the boom below horizontal and the lift leverin the full lower position, the implements will be inthe float function until the lift lever is moved out ofthe detent position.
g00686997Illustration 21Left Overhead Panel(2) Kickout set switch. (3) Loose material switch.
-
14Electrohydraulic SystemSystems Operation Section
Kickout set switch (2) is located on the overheadconsole on the left side of the operator compartment.The kickout set switch is used to set the kickoutsto the desired positions.
To set the bucket kickout position, tilt the bucket tothe desired LOADING position. When the tilt controllever returns to the HOLD position, press the top ofthe rocker switch for approximately two seconds.Then, release the switch.
To set the lower kickout position, lower the boom tothe desired position below the horizontal. When thelift control lever returns to the HOLD position, pressthe bottom of the rocker switch for approximatelytwo seconds. Then, release the switch.
To set the lift kickout position, raise the boom to thedesired position above the horizontal. When the liftcontrol lever returns to the HOLD position, press thebottom of the rocker switch for approximately twoseconds. Then, release the switch.
The loose material switch (3) is a momentaryswitch. The loose material switch activates the loosematerial mode. The loose material mode modifiesthe strategy for the dig trigger. This strategy willdecrease the time in order to complete the loadcycle. For additional information on the dig trigger,refer to Hydraulic System, Pump Control Operation.
g00687064Illustration 22Right Overhead Console(34) Ride control switch. (35) Lockup enable switch for the torqueconverter. (36) Windshield wiper/washer switch. (37) Autoshiftswitch.
The ride control switch (34) activates the ride controlsystem. The ride control system acts as a shockabsorber by dampening forces from the bucket.
The ride control switch is shown in the AUTOposition. A signal from the transmission outputspeed sensor is sent to the transmission ECM. TheECM will then energize the solenoid for the ridecontrol valve. The factory default will energize theride control solenoid valve when ground speed isgreater than approximately 10 km/h (6 mph). Thefactory default will de-energize the ride controlsolenoid valve when ground speed is less thanapproximately 9 km/h (5.7 mph).
The factory default can be changed throughthe Caterpillar Monitoring System or through theCaterpillar Electronic Technician by 1 km/h (1 mph)increments.
This view also shows the lockup enable switchfor the torque converter (35), the windshieldwiper/washer switch (36), and the autoshift switch(37).
-
15Electrohydraulic System
Systems Operation Section
g00678870Illustration 23Block Diagram of the Implement Electronic Control System
The implement Electronic Control Module (ECM)receives input signals from various sensorsand from various switches. The implement ECMprocesses the input and a corresponding output isprovided to the solenoids. The implement ECM alsocommunicates with other electronic control systemsvia the CAT Data Link.
The implement electronic control system consists ofthe following components:
Lift lever position sensor This sensor signals theECM with a PWM signal on the position of the liftcontrol lever.
Tilt lever position sensor This sensor signals theECM with a PWM signal on the position of the tiltcontrol lever.
Implement lockout switch This switch signalsthe ECM that the operator wants to disable theimplement hydraulics.
Kickout set switch This switch is used to set thekickout positions for the following functions: tiltback, lift raise, and lift lower .
Loose material switch This switch activates theloose material mode.
Lift linkage position sensor This sensor signals theECM on the position of the boom relative to themachine.
Tilt linkage position sensor This sensor signals theECM on the position of the bucket relative to theboom.
Pilot supply on/off solenoid This solenoid controlsthe pilot on/off solenoid valve. The solenoid isenergized or de-energized by the ECM relative tothe position of the implement lockout switch. Thiswill control the pilot hydraulic system.
Implement pump solenoid This solenoid controlsoil flow to the pump control valve. The pump controlvalve controls signal oil to the pump actuator.
-
16Electrohydraulic SystemSystems Operation Section
Tilt back solenoid This solenoid controls the pilotcontrol actuator for the tilt back end of the maincontrol spool. The pilot control actuator directs pilotoil from the tilt back end of the main control spoolto the tank.
Tilt dump solenoid This solenoid controls the pilotcontrol actuator for the tilt dump end of the maincontrol spool. The pilot control actuator directs pilotoil from the tilt dump end of the main control spoolto the tank.
Lift lower solenoid This solenoid controls the pilotcontrol actuator for the lift lower end of the maincontrol spool. The pilot control actuator directs pilotoil from the lift lower end of the main control spoolto the tank.
Lift raise solenoid This solenoid controls the pilotcontrol actuator for the lift raise end of the maincontrol spool. The pilot control actuator directs pilotoil from the lift raise end of the main control spoolto the tank.
Lower kickout detent coil This coil holds the liftlever in the LOWER position.
Lift raise kickout detent coil This coil holds the liftlever in the RAISE position.
Bucket kickout detent coil This coil holds the tiltlever in the TILT BACK position.
CAT data link The data link provides a bidirectionalpath for communications with other electroniccomponents.
-
17Electrohydraulic System
Systems Operation Section
i01443153
Pilot Hydraulic SystemSMCS Code: 5050-PS
Pilot Control ActuatorsHOLD Position
g00680599Illustration 24Pilot Control Actuator (Hold Position)(1) Stablizing spring. (2) Centering spring. (3) Return oil port. (4) Actuator solenoid. (5) Pilot spool. (6) Feedback spring. (7) Spring retainer. (8)Main spool. (9) Pilot oil port. (10) Actuator solenoid.
The pilot control actuators control the position ofthe lift spool and tilt spool of the implement controlvalve upon command of the implement ECM. Themain spool in this view represents a lift spool or atilt spool.
In the HOLD position, both solenoids for the pilotcontrol actuator are de-energized. When bothsolenoids are de-energized, the pilot spools directpilot oil to the ends of the main spool (8). The pilotpressure at each end of the main spool, and theforce of the centering springs (2) cause the mainspool to be centered in the control valve.
The centering springs and retainers (7) helpstabilize the movement of the main spool. Thestabilizing springs dampen the movement of thepilot spools by holding the pilot spools in contactwith the feedback springs.
-
18Electrohydraulic SystemSystems Operation Section
The Left Solenoid Energized
g00689459Illustration 25Pilot Control Actuator(1) Stablizing spring. (2) Centering spring. (3) Return oil port. (4) Actuator solenoid. (5) Pilot spool. (6) Feedback spring. (7) Spring retainer. (8)Main spool. (9) Pilot oil port. (10) Actuator solenoid.
When the operator moves an implement controllever from the centered position the implement ECMenergizes the actuator solenoid with a PWM signal.
In this view, the left actuator solenoid (4) isenergized. When the left solenoid is Energized, thesolenoid moves the pilot spool (5) to the right. Thepilot spool directs the pilot oil on the left side of themain spool (8) to drain. This decreases the pilot oilpressure at the left end of the main spool.
The right actuator solenoid (10) is de-energized.When the solenoid is de-energized, the feedbackspring holds the pilot spool to the right. The pilotspool directs pilot oil (9) to the right end of the mainspool. The pilot oil pressure at the right end of themain spool moves the main spool to the left. As themain spool moves to the left toward the pilot spoolthe centering springs (2) and the feedback spring(6) are compressed.
-
19Electrohydraulic System
Systems Operation Section
The Left Actuator Is Balanced
g00683749Illustration 26Pilot Control Actuator(1) Stablizing spring. (2) Centering spring. (3) Return oil port. (4) Actuator solenoid. (5) Pilot spool. (6) Feedback spring. (7) Spring retainer. (8)Main spool. (9) Pilot oil port. (10) Actuator solenoid.
When the left solenoid (4) is energized, the mainspool (8) moves to the left which compresses thecentering springs (2) and the feedback spring (6).The force of the feedback spring will move the pilotspool (5) to the left until the force of the feedbackspring is equal to the force of the actuator solenoidand the stabilizing spring. When the pilot spoolmoves far enough to the left, the pilot oil port andthe return oil port are blocked. When the oil in theactuator is blocked the main spool stops moving.The main spool will stay in this balanced positionuntil the current to the actuator solenoid changes.
If the operator moves the implement control leverfurther in the same direction, the implement ECMwill increase the duty cycle of the signal to theactuator solenoid. This increases the current whichincreases the force on the pilot spool. The pilotspool will move to the right which opens the returnoil port. The decreased oil pressure inside the leftactuator will allow the main spool to move further tothe left due to the pilot oil pressure on the right endof the main spool. As the main spool moves to theleft the feedback spring will be compressed moreand the feedback sequence begins again.
If the operator moves the implement control levertoward the centered position, the implement ECMwill decrease the duty cycle of the PWM signal tothe actuator solenoid. This results in a decrease incurrent and a decrease in force on the pilot spool.The decreased force will allow the pilot spool tomove to the left. When the pilot spool moves to theleft the pilot oil port is opened and the return oilport is blocked.
The combined force of the pilot oil and thecompressed centering springs on the left side ofthe main spool will move the main spool to the right.This will decrease the flow of oil to the implements.The force on the pilot spool from the feedbackspring decreases as the main spool moves to theright. The pilot spool also moves to the right. Asthe main spool moves to the right the force of thefeedback spring continues to decrease. The pilotspool continues to move to the right until the pilotoil port and the return oil port are blocked. Also,when the force of the feedback spring is equal tothe combined force of the stabilizing spring and theactuator solenoid the spools will be balanced. Thespools will remain in this state of balance until thecurrent to the actuator solenoid increases or thecurrent decreases.
-
20Electrohydraulic SystemSystems Operation Section
If the implement control lever is allowed to return tothe center the implement ECM will de-energize theactuator solenoid. The feedback spring will movethe pilot spool to the left which allows pilot oil to fillthe actuator. The combined force of the pilot oil andthe centering springs will cause the main spool tomove to the right until the spool is in the centeredposition.
Implement Control ValveHOLD Position
g00680837Illustration 27Implement Control Valve for the Lift(1) Rod end. (2) Load check valve. (3) Head end. (4) Pilot control actuator for raise. (5) Line relief and makeup valve for the rod end . (6) Line reliefand makeup valve for the head end. (7) Pilot control actuator for lowering. (8) Actuator solenoid for raise. (9) Lift spool. (10) Tank passage. (11)Supply passage. (12) Passage to next valve. (13) Internal passage. (14) Tank passage. (15) Pilot passage. (16) Actuator solenoid for lowering.
-
21Electrohydraulic System
Systems Operation Section
The implement control valve is a electrohydraulicpilot operated valve. The valve controls the positionof the lift cylinders and the tilt cylinders. The liftvalve is equipped with a line relief and makeupvalve (6) for the head end of the lift cylinders. Thelift valve is equipped with a line relief and makeupvalve (5) for the rod end of the lift cylinders. Thelift valve has the following four positions: RAISE,HOLD, LOWER, and FLOAT. The load check valve(2) prevents implement drift when the control valveis initially shifted.
In the HOLD position, pilot oil pressure is presentat both ends of the lift valve spool (9). The pilotoil and the centering springs keep the lift spool inthe centered position. The lift valve spool blocksoil flow to the lift cylinders. Also, oil flow from thecylinders is blocked by the main control spool. Theoil is trapped and the cylinders will remain in theHOLD position.
Oil from the implement pump enters the supplypassage (11), flows around the spool for the opencentered valve and flows to the tank.
The flow of oil to the tilt control spool is similar tothe flow of oil to the lift control spool. Oil from theimplement pump enters the supply passage (11),flows around the spool for the open centered valveand flows to the tank. The tilt valve spool has priorityover the lift spool.
-
22Electrohydraulic SystemSystems Operation Section
LOWER Position
g00680937Illustration 28Implement Control Valve for the Lift Lower(1) Rod end. (2) Load check valve. (3) Head end. (4) Pilot control actuator for raise. (5) Line relief and makeup valve for the rod end. (6) Line reliefand makeup valve for the head end. (7) Pilot control actuator for lowering. (8) Actuator solenoid for raise. (9) Lift spool. (10) Tank passage. (11)Supply passage. (12) Passage to next valve. (13) Internal passage. (14) Tank passage. (15) Pilot passage. (16) Actuator solenoid for lowering.
When the operator moves the lift lever to the LOWERposition, the lift lever sensor sends a PWM signalto the ECM. The ECM analyzes the signals fromthe following components: lift lever position sensor,lift linkage position sensor, and tilt linkage positionsensor. The ECM then sends a proportional signalthat energizes the solenoid for the pilot controlactuator (16) for lowering.
The solenoid moves the spool for the pilot controlactuator (7) in order to send pilot oil at the right endof the lift valve spool (9) to drain. This conditionreduces the pilot oil pressure at the right end of thecontrol spool. The pilot oil pressure on the left endof the control valve spool moves the lift valve spoolto the right LOWER position.
The lift valve spool directs flow from the implementpump (11) to the rod end of the lift cylinders. Oilflows past the load check valve (2 )and past the liftspool to the rod end of the lift cylinders (1). The liftspool also opens a passage (14) for oil in the headend (3) of the lift cylinders to return to the tank.
Operation for the RAISE function is similar. In theRAISE function, pilot oil moves the lift control spoolto the left. Supply oil also flows through the passage(12) to the supply passage for the tilt control valve.The tilt control valve is similar to the lift control valve.
-
23Electrohydraulic System
Systems Operation Section
i01640354
Main Hydraulic SystemSMCS Code: 5050
Control Strategy For ImplementsThe solenoid valve for the implement pumpis energized when the machine is in the DIGTRIGGER. This will destroke the implement pump.
The machine is in the DIG TRIGGER when all thefollowing conditions exist:
The transmission is in FIRST SPEED FORWARD.
The boom is below horizontal.
During the DIG TRIGGER, the implement ECMsends a PWM signal to the control valve for theimplement pump in order to destroke the pumpto approximately 164 cc per revolution. The ECMsends a PWM signal of approximately 0.55 amp tothe solenoid valve.
-
24Electrohydraulic SystemSystems Operation Section
Implement Pump
g00680453Illustration 29Implement Pump(1) Shuttle valve. (2) Control valve. (3) Input shaft. (4) Barrel. (5) Pistons. (6) Swashplate. (7) Large end of actuator. (8) Actuator slide. (9)Feedback linkage. (10) Super charger impeller. (11) Pressure tap for pump output. (12) Swashplate lever arm.
The implement pump is a variable displacementpiston pump. This view shows the shuttle valve (1),the pump control valve (2), and the main internalcomponents of the implement pump. The inputshaft (3) turns the barrel (4), which contains thepistons (5). The implement pump generates flowto the implement hydraulic system when the tiltedswashplate (6) causes the pistons to move in andout of the barrel.
The oil from the shuttle valve becomes the signal oilfor the pump. The shuttle valve contains two checkballs. The check balls allow the highest pressure oilfrom the pilot/brake pump or the implement pumpto flow to the small end of actuator (7) and pumpcontrol valve (2). The pump control valve modifiesthis signal oil. The pump control valve sends thissignal oil to the large end of the actuator in orderto control the tilt angle of the swashplate. Theswashplate angle determines the amount of oil flowfrom the pump. Swashplate lever arm (12) causesthe swashplate to tilt when the actuator moves. Theupper end of the lever arm engages actuator slide(8) in the center of the actuator.
-
25Electrohydraulic System
Systems Operation Section
Feedback linkage (9) connects the actuator anda sleeve in the pump control valve . The sleeve isnot shown in this view. As the pump upstrokes, thefeedback linkage gradually shifts the valve sleevein order to cancel the control signal at the desiredswashplate angle.
Super charger impeller (10) draws oil from thetank. This oil flows to the barreland to the pistonassembly. Pressure tap (11) is located on the shuttlevalve in order to check pump discharge pressure .
Pump Control Valve
g00680678Illustration 30Pump Control Valve(1) Pilot piston. (2) Flow control spool. (3) Large spring. (4) Feedback linkage. (5) Sleeve for the flow control spool. (6) Small spring. (7) Flowadjustment screw. (8) Maximum flow adjustment screw. (9) High pressure cutoff spool.
A cutaway view of the pump control valve isshown in this view. The control valve uses signaloil pressure from the pump shuttle valve to controloil flow from the pump.
When the variable pump solenoid valve (not shown)is energized, the valve directs pilot oil pressure fromthe pilot/brake pump to the right side of the pilotpiston (1). The pilot piston moves the flow controlspool (2) to the left against the large spring (3).The control spool directs signal oil pressure thatis coming from the shuttle valve to the large endof the actuator.
-
26Electrohydraulic SystemSystems Operation Section
The feedback linkage (4) connects the pumpswashplate to the sleeve (5) which surrounds theflow control spool through a pivot point in the controlvalve. As the swashplate moves, the feedbacklinkage moves the sleeve. The small spring (6) onthe right end of the sleeve eliminates excess playin the sleeve. The control spool and the sleevemeter signal oil to the large end of the actuator.Pump output (swashplate angle) is controlled byvarying the signal oil pressure to the large end ofthe actuator.
Flow adjustment screw (7) is located on the leftend of the control valve. When the flow adjustmentscrew is turned clockwise, the pump will destrokeat a higher pressure by the oil from the variablepump solenoid valve. Maximum flow adjustmentscrew (8) is located on the right end of the controlvalve. When the maximum flow adjustment screw isturned clockwise, the pump will destroke at a lowerflow rate.
Note: The high pressure cutoff spool (9) is locatedin the lower half of the valve body. As this viewshows, the spool is stationary. Since the spool isstationary, there is no high pressure cutoff for theconfiguration of this pump.
-
27Electrohydraulic System
Systems Operation Section
i01640551
Pump Control OperationSMCS Code: 5455-II
Pump and Control Valve Operation(Less Than 2400 kPa (350 psi))
g00679141Illustration 31Pump and Control Valve Operation(1) Line from the pilot/brake pump. (2) Line to the implement control valve. (3) Variable pump solenoid valve. (4) Shuttle valve. (5) Feedbacklever. (6) Flow control spool. (7) High pressure cutoff spool. (8) Actuator. (9) Super charger impeller. (10) Implement pump. (11) Swashplatelever arm. (12) Line from tank.
The schematic shows the oil flow in the implementpump (10) and in the pump control valve. Thesolenoid valve is controlled by the implementECM. The solenoid valve is de-energized in thisschematic. Pilot oil (1) is blocked at the variablepump solenoid valve (3) when the solenoid valve isde-energized.
Pilot oil and pump discharge oil flow into the shuttlevalve (4) and around the check balls. The checkballs allow the higher pressure oil to flow to thesmall end of the actuator (8) and into the pumpcontrol valve.
When implements are not activated, the implementcontrol valve is in the open center position. Pilot oilpressure is higher than pump discharge pressure(2). Pilot oil flows around the check ball and pilot oilbecomes signal oil.
The signal oil flows to the small end of the actuator(8) and in several directions inside the pump controlvalve. Signal oil is blocked at the high pressurecutoff spool (7).
Note: High pressure cutoff spool (7) is stationary.Since the spool is stationary, there is no highpressure cutoff for the configuration of this pump.
-
28Electrohydraulic SystemSystems Operation Section
Signal oil also flows to the flow control spool (6).Spring force moves the flow control spool to the left,which blocks the signal oil. Oil from the large end ofthe actuator (8) flows through the flow control valveto the case drain inside the pump.
Signal pressure on the small end of the actuatorcauses the pump to begin upstroking.
Pump and Control Valve Operation(Upstroke)
g00679142Illustration 32Pump and Control Valve Operation (Upstroke)(1) Line from the pilot/brake pump. (2) Line to the implement control valve. (3) Variable pump solenoid valve. (4) Shuttle valve. (5) Feedbacklever. (6) Flow control spool. (7) High pressure cutoff spool. (8) Actuator. (9) Super charger impeller. (10) Implement pump. (11) Swashplatelever arm. (12) Line from tank.
When an implement is activated, system pressureincreases. Pump discharge pressure (2) will behigher than pilot pressure (1). Pump pressure flowsaround the check ball in the shuttle valve (4). Pumppressure now becomes signal oil.
The signal oil flows to the small end of the actuator(8) and in several directions inside the pump controlvalve. The signal oil flows to the small end of theactuator and the signal oil moves the actuator tothe right. The pump (10) will upstroke. Signal oil isblocked at the high pressure cutoff spool (7).
-
29Electrohydraulic System
Systems Operation Section
Note: High pressure cutoff spool (7) is stationary.Since the spool is stationary, there is no highpressure cutoff for the configuration of this pump.
Signal oil also flows to the flow control spool (6).Spring force moves the flow control spool to the left,which blocks the signal oil. Pilot oil is blocked at thevariable pump solenoid valve (3) when the solenoidvalve is de-energized. The solenoid valve is shownto be de-energized in the schematic.
Oil from the large end of the actuator (8) is directedthrough the flow control valve to the case drainas the actuator moves to the right. The pump willupstroke.
When the actuator moves to the right to upstrokethe pump, the feedback lever (5) causes the flowcontrol sleeve to move to the left in the samedirection as the flow control spool. Oil flow to thelarge end of the actuator and from the large end ofthe actuator is metered by the valve sleeve and thevalve spool. This metering will maintain the actuatorposition.
-
30Electrohydraulic SystemSystems Operation Section
Pump and Control Valve Operation(Destroke)
g00679144Illustration 33Pump and Control Valve Operation (Destroke)(1) Line from the pilot/brake pump. (2) Line to the implement control valve. (3) Variable pump solenoid valve. (4) Shuttle valve. (5) Feedbacklever. (6) Flow control valve. (7) Dummy spool. (8) Actuator. (9) Super charger impeller. (10) Implement pump. (11) Swashplate lever arm. (12)Line from tank.
When the machine is in the DIG TRIGGER, theimplement ECM will energize the variable pumpsolenoid valve (3) in order to limit pump output. Thesolenoid valve directs pilot oil (1) to the left end ofthe flow control spool (6) and the spool moves tothe right against spring force.
Signal oil at the flow control valve is directed tothe large end of the actuator (8), which moves theactuator to the left. When the actuator moves to theleft, the pump (10) begins to destroke.
When the actuator moves to the left to destrokethe pump, the feedback lever (5) causes the flowcontrol sleeve to move to the right in the samedirection as the flow control spool. Oil flow to thelarge end of the actuator and from the large end ofthe actuator is metered by the valve sleeve and thevalve spool. This metering will maintain the actuatorposition.
The variable pump solenoid valve controls the rateof destroke by controlling the position of flow controlspool (6). The flow control spool and the controlsleeve control the rate of flow to the large end andfrom the large end of the actuator.
-
31Electrohydraulic System
Systems Operation Section
i01443043
Hydraulic System OperationSMCS Code: 5050
HOLD Position
-
32Electrohydraulic SystemSystems Operation Section
g00688359Illustration 34
-
33Electrohydraulic System
Systems Operation Section
Implement Hydraulic System(1) Lift cylinder. (2) Tilt cylinder. (3) Pressure reducing valve. (4) Shuttle valve. (5) Ride control valve. (6) Pilot on/off solenoid valve. (7) Floatsequence valve. (8) Pilot control actuator LOWER. (9) Pilot control actuator TILT BACK. (10) Pilot control actuator RAISE. (11) Pilot controlactuator DUMP. (12) Main relief valve . (13) Implement pump. (14) Supply from pilot/brake pump. (15) Float check valve.The electrical system is not shown in this schematic.
This schematic shows the oil flow in the implementpilot system and the implement hydraulic systemwhen the engine is running and the control valvesare in the HOLD position.
In the pilot system, oil from the pilot/brake pump(14) flows to the following components: controlvalve for the implement pump, ride control valve (5)(if equipped), and pilot on/off solenoid valve (6).
The pilot relief valve limits the pilot system pressureto 2400 205 kPa (350 30 psi). The pilot on/offsolenoid valve is controlled by the implement ECMin reference to the position of the lockout switch.When the implement lockout switch is in the OFFposition, the ECM de-energizes the pilot on/offsolenoid valve. Pilot oil is then blocked at the piloton/off solenoid valve. When the implement lockoutswitch is in the ON position, the ECM energizes thesolenoid for the pilot on/off solenoid valve. Pilot oilflows past the pilot on/off solenoid valve to the pilotcontrol actuator (8), (9), (10), and (11) on each endof the control valve spools.
The implement pump pulls oil from the tank. Theoil flows to the implement control valve. When thecontrol valve spools are in the HOLD position, oilflows past the main relief valve (12) and through theopen center control valves to the tank. The mainrelief valve constantly senses main system pressureat the implement control valve and opens to the tankwhen the pressure reaches the maximum setting ofapproximately 31000 kPa (4500 psi).
In the HOLD position, oil flow to the cylinders andoil flow from the cylinders is blocked at the controlvalve spools.
TILT BACK Position
-
34Electrohydraulic SystemSystems Operation Section
g00682371Illustration 35
-
35Electrohydraulic System
Systems Operation Section
Implement Hydraulic System(1) Lift cylinder. (2) Tilt cylinder. (3) Pressure reducing valve. (4) Shuttle valve. (5) Ride control valve. (6) Pilot on/off solenoid valve. (7) Floatsequence valve. (8) Pilot control actuator LOWER. (9) Pilot control actuator TILT BACK. (10) Pilot control actuator RAISE. (11) Pilot controlactuator DUMP. (12) Main relief valve . (13) Implement pump. (14) Supply from pilot/brake pump. (15) Float check valve.The electrical system is not shown in this schematic.
When the tilt lever is moved to the TILT BACKposition, the tilt lever position sensor changes theduty cycle of the PWM signal to the ECM. TheECM analyzes the input signals from the followingsensors: tilt lever position sensor, lift lever positionsensor, lift linkage position sensor, and tilt linkageposition sensor. The ECM sends a proportionalsignal in order to energize the solenoid for thepilot control actuator on the tilt back end (9) of thecontrol valve. The amount of current that is sent bythe ECM is determined by the input signals from thefollowing sensors: tilt lever position sensor, lift leverposition sensor, lift linkage position sensor, and tiltlinkage position sensor. Also, the values that areobtained during calibration of the control valve andcalibration of the position sensor will determine thestrength of the current that is sent by the ECM.
The pilot control actuator sends pilot oil to the tankin order to reduce the oil pressure at the tilt backend of the control spool. The pilot oil pressure at thedump end (11) of the control valve spool moves thecontrol valve spool to the TILT BACK position. Thespool blocks the flow of implement pump oil to thetank. This opens a passage from the pump to therod end of the tilt cylinder (2). Implement pump oilflows past the load check valve and through the tiltspool to the rod end of the tilt cylinder.
The oil from the head end of the tilt cylinder flowspast each control valve spool to the tank.
Note: In the TILT BACK position, pump output oil tothe lift control spool is blocked by the tilt controlspool when the tilt control spool is fully shifted. Thisgives the circuit for the tilt control priority.
RAISE Position
-
36Electrohydraulic SystemSystems Operation Section
g00682441Illustration 36
-
37Electrohydraulic System
Systems Operation Section
Implement Hydraulic System(1) Lift cylinder. (2) Tilt cylinder. (3) Pressure reducing valve. (4) Shuttle valve. (5) Ride control valve. (6) Pilot on/off solenoid valve. (7) Floatsequence valve. (8) Pilot control actuator LOWER. (9) Pilot control actuator TILT BACK. (10) Pilot control actuator RAISE. (11) Pilot controlactuator DUMP. (12) Main relief valve . (13) Implement pump. (14) Supply from pilot/brake pump. (15) Float check valve.The electrical system is not shown in this schematic.
When the lift lever is moved to the RAISE position,the lift lever position sensor changes the duty cycleof the PWM signal to the ECM. The ECM analyzesthe input signals from the following components:lift lever position sensor, tilt lever position sensor,lift linkage position sensor, and tilt linkage positionsensor. The ECM sends a proprotional signal inorder to energize the solenoid on the pilot controlactuator (10) that is located on the control valve.This is the pilot control actuator that is used for theRAISE position. The amount of current that is sentby the ECM is determined by the input signals fromthe following sensors: lift lever position sensor, tiltlever position sensor, lift linkage position sensor,and tilt linkage position sensor. Also, the values thatare obtained during calibration of the control valveand calibration of the position sensor will determinethe strength of the current that is sent by the ECM.
The pilot control actuator sends pilot oil to the tankin order to reduce the oil pressure at the raise endof the control spool. The pilot oil pressure at thelower end (8) of the control valve spool moves thecontrol valve spool to the RAISE position. The spoolblocks the flow of implement pump oil to the tank.Also, the control spool opens a passage from thepump to the load check valve (2).
Before the load check valve will open, pumppressure must be greater than the pressure in thehead end (3) of the lift cylinder and the spring forceof the load check valve combined. By allowingpressure in the open center to increase, the loadcheck valve keeps the implement from droppingwhen the valve is first shifted. Implement pump oilflows through the load check valve and through thelift spool to the head end of the lift cylinders.
The oil from the rod end of the lift cylinders flowspast each control valve spool to the tank.
LOWER Position
-
38Electrohydraulic SystemSystems Operation Section
g00681552Illustration 37
-
39Electrohydraulic System
Systems Operation Section
Implement Hydraulic System(1) Lift cylinder. (2) Tilt cylinder. (3) Pressure reducing valve. (4) Shuttle valve. (5) Ride control valve. (6) Pilot on/off solenoid valve. (7) Floatsequence valve. (8) Pilot control actuator LOWER. (9) Pilot control actuator TILT BACK. (10) Pilot control actuator RAISE. (11) Pilot controlactuator DUMP. (12) Main relief valve . (13) Implement pump. (14) Supply from pilot/brake pump. (15) Float check valve.The electrical system is not shown in this schematic.
When the lift lever is moved to the LOWER position,the lift lever sensor changes the duty cycle of thePWM signal to the ECM. The ECM analyzes theinput signals from the following components: liftlever position sensor, tilt lever position sensor, liftlinkage position sensor, and tilt linkage positionsensor. The ECM sends a proprotional signal inorder to energize the solenoid on the pilot controlactuator (8) that is located on the control valve.This is the pilot control actuator that is used for theLOWER position. The amount of current that is sentby the ECM is determined by the input signals fromthe following sensors: lift lever position sensor, tiltlever position sensor, lift linkage position sensor,and tilt linkage position sensor. Also, the values thatare obtained during calibration of the control valveand calibration of the position sensor will determinethe strength of the current that is sent by the ECM.
The pilot control actuator sends pilot oil to the tankin order to reduce the oil pressure at the lower endof the control valve spool. The pilot oil pressure atthe raise end (10) of the control valve spool movesthe control valve spool to the LOWER position. Thespool blocks the flow of implement pump oil to thetank. This opens a passage from the pump to therod end of the lift cylinders. Implement pump oilflows past the load check valve and through the liftspool to the rod end of the lift cylinders (1).
Oil flows from the tank passage through thecombination line relief and makeup valve for therod end. Also, oil flows past the float check valveif additional flow is required. This makeup oil willprevent the rod end of the cylinder from cavitating.
The oil from the head end of the lift cylinder flowspast each control valve spool to the tank.
FLOAT Position
-
40Electrohydraulic SystemSystems Operation Section
g00682488Illustration 38
-
41Electrohydraulic System
Systems Operation Section
Implement Hydraulic System(1) Lift cylinder. (2) Tilt cylinder. (3) Pressure reducing valve. (4) Shuttle valve. (5) Ride control valve. (6) Pilot on/off solenoid valve. (7) Floatsequence valve. (8) Pilot control actuator LOWER. (9) Pilot control actuator TILT BACK. (10) Pilot control actuator RAISE. (11) Pilot controlactuator DUMP. (12) Main relief valve . (13) Implement pump. (14) Supply from pilot/brake pump. (15) Float check valve.The electrical system is not shown in this schematic.
Note: To enter the FLOAT position, the machineboom must be below the horizontal position.
When the lift lever is in the FLOAT position or whenthe lift control lever is in the LOWER position,the movement of the lift control spool is thesame movement. In the FLOAT position, the ECMincreases the electrical signal in order to energizethe solenoid for the pilot control actuator that isused for lowering. The increased electrical signalopens the pilot control actuator fully to the tank.
Also, the ECM energizes the coil for the float detenton the lift control lever. The coil holds the lift lever inthe FLOAT position.
When the pilot control actuator is fully opened to thetank, oil is also drained from the spring chamber inthe float sequence valve (7). The pilot oil pressureat the opposite end of the float sequence valveovercomes the spring force. The float sequencevalve opens to the tank.
When the float sequence valve is open, the oil thatwas blocked in the spring chamber of the floatcheck valve (15) flows through the float sequencevalve to the tank.
The pressure in the spring chamber for the floatcheck valve is reduced approximately to tankpressure. The oil from the implement pump (13)flows through the float check valve to the tank.
There is an orifice that restricts the amount of oilflow from the implement pump into the springchamber of the float check valve. The oil flow out ofthe spring cavity of the float check valve is fasterthan the oil flow from the implement pump into thespring cavity of the float check valve. This createsa pressure difference between the pump oil that isblocked by the float check valve and the oil that isvented from the spring chamber in the float checkvalve. This pressure difference will cause the floatcheck valve to open.
The lift control spool allows the head end oil to flowto the tank. The rod end of the lift cylinder has apassage to the tank through the float check valve.The pressure difference between the pump oil thatis blocked by the float check valve and the oil in thespring cavity of the float check valve increases. Theimplement is allowed to move up and down in orderto follow the contour of the ground.
LOWER Position (NonrunningEngine)
-
42Electrohydraulic SystemSystems Operation Section
g00688318Illustration 39
-
43Electrohydraulic System
Systems Operation Section
Implement Hydraulic System(1) Lift cylinder. (2) Tilt cylinder. (3) Pressure reducing valve. (4) Shuttle valve. (5) Ride control valve. (6) Pilot on/off solenoid valve. (7) Floatsequence valve. (8) Pilot control actuator LOWER. (9) Pilot control actuator TILT BACK. (10) Pilot control actuator RAISE. (11) Pilot controlactuator DUMP. (12) Main relief valve . (13) Implement pump. (14) Supply from pilot/brake pump. (15) Float check valve.The electrical system is not shown in this schematic.
In this schematic, the bucket is being lowered witha nonrunning engine. The key start switch is in theON position.
The weight of the implement creates a high pressurein the head end of the lift cylinders (1). The highpressure oil in the lift cylinder flows through thelines and the oil moves the shuttle valve (4) tothe right. The high pressure oil is directed to thepressure reducing valve (3). The pressure reducingvalve decreases the oil pressure in the lift cylinderto approximately 1800 kPa (260 psi). This oil flowspast the check valve to the pilot on/off solenoidvalve (6) and the oil now becomes the oil supplyfor the pilot system. When the solenoid for thepilot on/off control valve is de-energized, pilot oil isblocked at the pilot on/off solenoid valve. When thepilot on/off solenoid valve is energized, the pilot oilflows through the pilot on/off solenoid valve. This oilpressurizes the pilot control actuators.
The nonrunning engine will not affect the function ofthe implement control lever. The ECM will still controlthe implement functions with the key start switch inthe ON position. The lift control spool directs oil inthe head end of the lift cylinders to the tank.
Tank oil flows through the line relief and makeupvalves for the rod end of lift cylinders in order toprevent cavitation in the cylinders.
Note: The shuttle valve allows oil from the rod endto be used as pilot oil if the implement needs to beraised with an external lifting device. The lift leverneeds to be moved to the RAISE position with thekey start switch in the ON position.
Manual Lowering
-
44Electrohydraulic SystemSystems Operation Section
g00755981Illustration 40
-
45Electrohydraulic System
Systems Operation Section
Implement Hydraulic System(1) Lift cylinder. (2) Tilt cylinder. (3) Pressure reducing valve. (4) Shuttle valve. (5) Ride control valve. (6) Pilot on/off solenoid valve. (7) Floatsequence valve. (8) Pilot control actuator LOWER. (9) Pilot control actuator TILT BACK. (10) Pilot control actuator RAISE. (11) Pilot controlactuator DUMP. (12) Main relief valve . (13) Implement pump. (14) Supply from pilot/brake pump. (15) Float check valve.The electrical system is not shown in this schematic.
In this schematic, the bucket is being lowered witha nonrunning engine. The key start switch is in theOFF position.
The weight of the implement creates a high pressurein the head end of the lift cylinders (1). The highpressure oil in the lift cylinder flows through thehydraulic lines and the oil moves the shuttle valve(4) to the right. The high pressure oil is directedto the pressure reducing valve (3). The pressurereducing valve decreases the oil pressure in thelift cylinder to approximately 1800 kPa (260 psi).This oil flows past the check valve to the ball valve.Opening the ball valve allows this oil to flow to thetank. The implement will lower to the ground.
Tank oil flows through the line relief and makeupvalves for the rod end of lift cylinders in order toprevent cavitation in the cylinders.
Note: If the implement needs to be raised, the highpressure oil in the rod end will shift the shuttle valveto the left. The oil will flow through the pressurereducing valve to the ball valve and the implementcan be raised by using the appropriate liftingmethod.
i01640564
Ride Control SystemSMCS Code: 5004
-
46Electrohydraulic SystemSystems Operation Section
g00682894Illustration 41
-
47Electrohydraulic System
Systems Operation Section
Implement Hydraulic System(1) Lift cylinder. (2) Tilt cylinder. (3) Pressure reducing valve. (4) Shuttle valve. (5) Ride control valve. (6) Pilot on/off solenoid valve. (7) Floatsequence valve. (8) Pilot control actuator LOWER. (9) Pilot control actuator TILT BACK. (10) Pilot control actuator RAISE. (11) Pilot controlactuator DUMP. (12) Main relief valve. (13) Implement pump. (14) Supply from pilot/brake pump. (15) Float check valve.The electrical system is not shown in this schematic.
This schematic shows the hydraulic flow when theride control solenoid valve (5) is energized. The ridecontrol solenoid valve is controlled by the powertrain ECM.
g00688901Illustration 42Ride Control Switch in the AUTO position
The ride control switch allows the operator to selectthe ride control OFF position or the ride controlAUTO position.
g00681839Illustration 43Left Side of Front Frame(5) Ride control valve. (16) Ride control solenoid.
When the ride control switch is in the OFF position,the ride control solenoid valve (16) is de-energized.
When the ride control switch is in the AUTO position,the power train ECM energizes the ride controlsolenoid when the machine ground speed is above10 km/h (6 mph). The power train ECM de-energizesthe ride control solenoid when the machine groundspeed is less than approximately 9 km/h (5.7 mph).These speeds are the factory default.
The factory default can be changed throughthe Caterpillar Monitoring System or through theCaterpillar Electronic Technician by 1 km/h (1 mph)increments.
g00681890Illustration 44Right Side of Front Frame(17) Accumulator.
When the ECM energizes the ride control solenoidvalve, pilot pressure at the diverter spool flows tothe tank. The spring shifts the diverter spool in theride control valve and pressure oil from the headend of the lift cylinders (1) is directed to the ridecontrol accumulator (17).
A floating piston in the accumulator separates theoil from the nitrogen gas. Since nitrogen gas canbe compressed, the gas functions as a shockabsorber. Any downward force on the lift arms istransfered through the oil at the head end of thelift cylinders to the accumulator. The pressure ofthe oil is transmitted to the accumulator piston,which compresses the nitrogen gas. Compressingthe nitrogen gas absorbs spikes in the pressure ofthe oil.
Oil pressure on the accumulator piston willcompress the nitrogen gas. As the nitrogen gas iscompressed the piston will move. The area thatcontains the nitrogen gas will decrease. The areathat contains the oil will increase. The downwardforce on the lift arms will displace some oil fromthe lift cylinders. The displaced oil flows into thisincreased area that is now available.
The oil in the rod end of the lift cylinders is directedto the tank. This will prevent cavitation in the rodend of the lift cylinders when the nitrogen in theaccumulator is compressed and the implement isallowed to lower slightly.
-
48Electrohydraulic SystemSystems Operation Section
With ride control activation, there are fewer shockson structures and components, reduced flexing ofthe tires, and greater load retention. The result is asmoother ride with less rocking of the machine fromfront to back when the machine is travelling.
i01641006
Hydraulic Fan SystemSMCS Code: 1386; 1387
Components For The HydraulicFan SystemFan Pump
g00683396Illustration 45Right Side of Engine Compartment(8) Fan pump. (13) Compensator valve.
The fan pump (8) is a variable displacement pistonpump. The pump is mounted on the pump driveat the front of the engine on the right side of themachine.
The flow compensator valve (13) which controls thepump flow is mounted on top of the pump. Thecompensator valve contains a flow control spooland a pressure cutoff spool. The settings of bothspools can be adjusted.
Fan Motor
g00683397Illustration 46Rear of the Machine(4) Fan motor.
The fan motor (4) is a hydraulic gear motor thatis located at the rear of the machine in front ofthe engine radiator. The machines that are highambient will be equipped with a piston motor. Thefan motor turns the fan which is mounted on themotor shaft. The fan pulls air through openings inthe side and openings in the top of the machinebehind the engine compartment. After the airis pulled through the openings, the air passesthrough the following components: Air To Air AfterCooler, hydraulic oil cooler, the radiator, and the airconditioner condenser. Finally, the air exits the rearof the machine.
Thermostatic Valve
g00683399Illustration 47Left Side of Engine Compartment(12) Thermostatic Valve.
Thermostatic valve (12) controls the flow of thefan pump that is based on the temperature of theengine coolant . The engine coolant passes acrossthe probe end of the thermostatic valve as thecoolant flows from the radiator outlet to the coolantpump.
-
49Electrohydraulic System
Systems Operation Section
When the engine coolant is below 70 C (158 F),the thermostatic valve allows oil from the flowcontrol spool in the pump pressure compensatorvalve to flow to the tank. This causes the pump todestroke. The pump will also produce less oil flow.The speed of the engine cooling fan will decrease.
When the engine coolant is above 90 C (194 F),the thermostatic valve blocks oil flow from the flowcontrol spool in the pump pressure compensatorvalve to the tank. This causes the pump to upstroke.When the pump upstrokes, pump flow to the fanmotor is increased. The fan motor speed increasesand the fan motor circulates more cooling air.
The thermostatic valve varies the amount of oil flowthat passes through the thermostatic valve as thetemperature of the coolant changes from 70 C(158 F) to 90 C (194 F). During this temperaturechange, the thermostatic valve is not totally open ortotally closed.
Case Drain Filter
g00683401Illustration 48Pump Compartment(11) Case drain filter.
The case drain filter (11) for the fan pump is locatedabove the pump drive.
-
50Electrohydraulic SystemSystems Operation Section
Low Pressure Standby
g00848495Illustration 49Hydraulic Fan System(1) Bypass valve. (2) Oil cooler. (3) Fan. (4) Fan motor. (5) Check valve. (6) Flow control spool. (7) Pressure cutoff spool. (8) Fan pump. (9)Destroke actuator. (10) Bypass valve for the case drain filter. (11) Thermostatic valve.
When the engine is started and the engine coolantis cold, the bias spring causes the fan pump (8)to upstroke. When the pump upstrokes , the pumpwill produce flow. The fan pump is on STANDBY.At STANDBY, the pump produces low flow atapproximate pressure of 2000 kPa (290 psi).Thermostatic valve (12) allows oil from the right sideof the flow control spool (6) to flow to tank. Thepump system pressure will start to increase. Thepump system pressure works against the springforce of the flow control spool and the spring forceof the pressure cutoff spool (7). When the systempressure overcomes the force of the flow controlspring, the flow control spool will shift. The flowcontrol spool shifts to the right. This permits systemoil to flow to the destroke actuator (9) in the pump.
As pressure in the destroke actuator pistonincreases to overcome the force of the bias spring,the destroke actuator piston moves the swashplateto the reduced angle.
-
51Electrohydraulic System
Systems Operation Section
Upstroke
g00848496Illustration 50Hydraulic Fan System(1) Bypass valve. (2) Oil cooler. (3) Fan. (4) Fan motor. (5) Check valve. (6) Flow control spool. (7) Pressure cutoff spool. (8) Fan pump. (9)Destroke actuator. (10) Bypass valve for the case drain filter. (11) Thermostatic valve.
When the coolant is above 70 C (158 F),thermostatic valve (12) will begin to block oil flowto the tank. This will increase system oil pressureat the right end of the flow control spool (6). Theincreased pressure causes the combined force ofthe oil and spring at the right end of the flow controlspool to become greater than the force of the pumpsupply pressure at the left end of the spool.
The increased pressure at the right end of the flowcontrol spool causes the spool to shift to the left.The spool reduces the flow of system pressure oilto the destroke actuator (9). At the same time, thisopens a passage from the destroke actuator to thedrain . Reducing oil flow to the destroke actuatorreduces the oil pressure on the destroke actuatorpiston. When the pressure on the destroke actuatorpiston decreases, the force of the bias springmoves the swashplate to an increased angle. Thiscauses the fan pump (8) to upstroke.
When the pump upstrokes, the increased flowcauses the fan (3) to turn at an increased speed.This will increase cooling.
-
52Electrohydraulic SystemSystems Operation Section
Destroke
g00848497Illustration 51Hydraulic Fan System(1) Bypass valve. (2) Oil cooler. (3) Fan. (4) Fan motor. (5) Check valve. (6) Flow control spool. (7) Pressure cutoff spool. (8) Fan pump. (9)Destroke actuator. (10) Bypass valve for the case drain filter. (11) Thermostatic valve.
When the coolant is below a set temperature,thermostatic valve (12) allows oil from the right endof the flow control spool (6) to flow to the tank. Oilpressure at the right end of the flow control spooldecreases. This decreased pressure causes theforce at the right end of the flow control spool todecrease below the pump supply pressure at theleft end of the spool. The decreased pressure at theright end of the flow control spool causes the valveto shift to the right. This allows the flow of moresystem pressure oil to the destroke actuator whichcauses the force on the destroke actuator piston (9)to increase. The increased force on the destrokeactuator piston overcomes the force of the biasspring. The swashplate moves to a reduced angle.
As pump flow decreases, supply pressure alsodecreases. When the supply pressure equals thesum of the oil pressure at the right end of the flowcontrol valve and spring force, the flow controlvalve moves to a metering position and the systemstabilizes.
-
53Electrohydraulic System
Index Section
Index
E
Electrohydraulic System Components................... 5Electronic Control System Components................ 11
G
General Information............................................... 4Color Codes for Illustrations............................... 4
H
Hydraulic Fan System............................................ 48Components For The Hydraulic Fan System..... 48Destroke............................................................. 52Low Pressure Standby....................................... 50Upstroke............................................................. 51
Hydraulic System Operation.................................. 31FLOAT Position .................................................. 39HOLD Position ................................................... 31LOWER Position ................................................ 37LOWER Position (Nonrunning Engine) .............. 41Manual Lowering................................................ 43RAISE Position .................................................. 35TILT BACK Position............................................ 33
I
Important Safety Information ................................. 2
M
Main Hydraulic System.......................................... 23Control Strategy For Implements ....................... 23Implement Pump................................................ 24Pump Control Valve ........................................... 25
P
Pilot Hydraulic System........................................... 17Implement Control Valve.................................... 20Pilot Control Actuators ....................................... 17
Pump Control Operation........................................ 27Pump and Control Valve Operation (Destroke).. 30Pump and Control Valve Operation (Less Than2400 kPa (350 psi)) .......................................... 27
Pump and Control Valve Operation (Upstroke).. 28
R
Ride Control System.............................................. 45
S
Systems Operation Section ................................... 4
T
Table of Contents................................................... 3
-
54Electrohydraulic SystemIndex Section
-
55Electrohydraulic System
Index Section
-
2001 CaterpillarAll Rights Reserved Printed in U.S.A.