
Boosting Based Multiclass Ensembles and Their Application ...
132
Boosting Based Multiclass Ensembles and Their Application in Machine Learning PhD Dissertation Mubasher Baig 2004-03-0040 Advisor Dr. Mian Muhammad Awais Department of Computer Science School of Science and Engineering Lahore University of Management Sciences
Transcript of Boosting Based Multiclass Ensembles and Their Application ...

Boosting Based Multiclass Ensembles and TheirApplication in Machine Learning
PhD Dissertation
Mubasher Baig
2004-03-0040
AdvisorDr. Mian Muhammad Awais
Department of Computer Science
School of Science and Engineering
Lahore University of Management Sciences

Dedicated To
Lahore University of Management Sciences (LUMS)
Lahore, Pakistan

Lahore University of Management Sciences
School of Science and Engineering
CERTIFICATE
I hereby recommend that the thesis prepared under my supervision by Mubasher Baig titled Boost-
ing Based Multiclass Ensembles and Their Application in Machine Learning be accepted in par-
tial fulfillment of the requirements for the degree of Doctor of Philosophy in Computer Science.
Dr. Mian M. Awais (Advisor)
Recommendation of Examiners’ Committee:
Name Signature
Dr. Mian Muhammad Awais (Advisor) ————————————-
Dr. Asim Karim ————————————-
Dr. Shafay Shamail ————————————-
Dr. Ahmad Kamal Nasir ————————————-
Dr. Kashif Javed (External Examiner) ————————————-

Acknowledgements
I am grateful to Dr. Main M. Awais for his supervision, guidance and support for this thesis. I truly
thank him for his generosity and professionalism without which this dissertation could never have
reached the final state. I am also thankful to Dr. Haroon Atiq Babri for an inspiring introduction to
my research area and for teaching me the basic and advanced Machine Learning courses. I would
like to thank Dr. M. A. Mauad, Dr. Ashraf Iqbal, Dr. Asim Karim, Dr. Asim Loan, Dr. Tariq
Jadoon, Dr. Sohaib Khan, Dr. Naveed Irshad, Dr. Zartash Afzal, Dr. Nabeel Mustafa, and all
faculty of LUMS for their inspiring research and effective teaching.

Contents
1 Introduction 1
1.1 Supervised Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Ensemble Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Dissertation Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1 Handling Multiclass Learning Problems . . . . . . . . . . . . . . . . . . . 4
1.3.2 Incorporate Domain Knowledge in Boosting . . . . . . . . . . . . . . . . 6
1.3.3 Boosting Based Learning of an Artificial Neural Network . . . . . . . . . 7
1.4 Dissertation Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 List of Publications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Preliminaries 10
2.1 PAC Model of Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Review of Boosting Algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1 AdaBoost Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.2 Multi-class Boosting Algorithms . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.3 Incorporating Prior Knowledge in Boosting Procedures . . . . . . . . . . . 20
2.3 Closure Properties of PAC learnable Concept Classes . . . . . . . . . . . . . . . . 20
2.4 Learning Multiple Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4.1 m-PAC Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
v

3 Multiclass Ensemble Learning 23
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2 Multi-Class Boosting Contributions . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.1 M-Boost Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.2 CBC: Cascade of Boosted Classifier . . . . . . . . . . . . . . . . . . . . . 33
3.3 Experimental Settings and Results . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3.1 M-Boost vs State-of-the-art Boosting Algorithms . . . . . . . . . . . . . . 37
3.3.2 Cascade of Boosted Classifiers for Intrusion Detection . . . . . . . . . . . 42
3.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4 Incorporating Prior into Boosting 54
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2 Incorporating Prior into Boosting . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.1 Generating the Prior Knowledge . . . . . . . . . . . . . . . . . . . . . . . 62
4.3 Experimental Settings and Results . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.3.1 Results and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5 Boosting Based ANN Learning 73
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.2 AdaBoost Based Neural Network Learning . . . . . . . . . . . . . . . . . . . . . 77
5.2.1 Boostron: Boosting Based Perceptron Learning . . . . . . . . . . . . . . . 78
5.2.2 Beyond a Single Perceptron Learning . . . . . . . . . . . . . . . . . . . . 80
5.2.3 Incorporating Non-Linearity into Neural Network Learning . . . . . . . . 85
5.2.4 Multiclass Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.3 Learning Artificial Neural Network for Intrusion Detection . . . . . . . . . . . . . 87
5.4 Experimental Settings and Results . . . . . . . . . . . . . . . . . . . . . . . . . . 89
vi

5.4.1 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.4.2 Artificial Neural Network Based Network Intrusion Detection System . . . 95
5.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
6 Conclusions and Future Research Directions 105
6.1 Limitations and Future Research Directions . . . . . . . . . . . . . . . . . . . . . 107
6.1.1 Incorporating Prior into Boosting . . . . . . . . . . . . . . . . . . . . . . 107
6.1.2 Boosting-Based ANN learning methods . . . . . . . . . . . . . . . . . . . 108
6.1.3 Muulticlass Ensemble Learning . . . . . . . . . . . . . . . . . . . . . . . 109
vii

List of Figures
3.1 Weight reassignment strategy
(a) Relationship of entropy and probability assigned to the actual class . . . . . . . 32
3.2 Hierarchical Structures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.3 Effect of weight vector α on the test error of AdaBoost-M1 . . . . . . . . . . . . . 40
3.4 Error rate comparison of M-Boost, Multi-Class AdaBoost and AdaBoost-MH . . . 43
3.5 Number of datasets per test error interval . . . . . . . . . . . . . . . . . . . . . . . 44
3.6 Test error rate comparison of M-Boost,Gentle, Modest and Real AdaBoost on 4
simulated binary data sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.7 Test error rate comparison of M-Boost, Gentle, Modest and Real AdaBoost on 3
binary data sets from UCI repository . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.8 Dataset Statistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.1 Test Error: AdaBoost-P1 vs Multiclass AdaBoost . . . . . . . . . . . . . . . . . . 68
4.2 Test Error: AdaBoost-P1 vs AdaBoost-M1 . . . . . . . . . . . . . . . . . . . . . . 70
4.3 Test Error: Effect of Prior in case of Sparse Training Data . . . . . . . . . . . . . . 71
5.1 Typical structure of a single-layer Perceptron . . . . . . . . . . . . . . . . . . . . 75
5.2 Feed-forward Network with a single hidden layer and a single output unit . . . . . 81
viii

List of Tables
3.1 Datasets used in our experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2 AdaBoost-M1 Vs AdaBoost-M1 with weight vector α . . . . . . . . . . . . . . . . 41
3.3 Percent error rate comparison of M-Boost, AdaBoost-MH and Multi-Class AdaBoost 44
3.4 Dataset Summary: Category, Notation, Name, Type, Statistics and Description . . . 49
3.5 Dataset Summary: Category, Notation, Name, Type, Statistics and Description . . . 50
3.6 Comparison of various methods in terms of accuracy, precision, recall and F1 mea-
sure for training and testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.7 Comparison of various methods in terms of accuracy, precision, recall and F1 mea-
sure for training and testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.1 Datasets Used in Our Experiments. . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.2 Test Error rate Comparison of Multiclass AdaBoost and AdaBoost-P1 . . . . . . . 66
4.3 Test Error rate Comparison of Multiclass AdaBoost and AdaBoost-P1 . . . . . . . 66
4.4 Test Error rate Comparison of AdaBoost-M1 and AdaBoost-P1 . . . . . . . . . . . 69
4.5 Test Error rate Comparison of AdaBoost-M1 and AdaBoost-P1 . . . . . . . . . . . 71
4.6 Effect of Prior Quality on Error rate of Multiclass AdaBoost . . . . . . . . . . . . 71
5.1 Description of Datasets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.2 Test Error Rate Comparison of Perceptron vs Boostron . . . . . . . . . . . . . . . 92
5.3 Test Error Rate Comparison of Extended Boostron vs linear Back-propagation . . . 93
ix

5.4 Boosting Based ANN Learning vs Back-propagation Algorithm . . . . . . . . . . 94
5.5 KDD-cup class frequencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.6 UNSW-NB15 class frequencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.7 Performance of Intrusion Detection System for Three Dominant Classes . . . . . . 98
5.8 An average of the performance measures . . . . . . . . . . . . . . . . . . . . . . . 99
5.9 Normal vs Intrusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.10 Fold-wise Test Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.11 Test Performance for 8 Classes Constituting 99.65% of Examples . . . . . . . . . 101
5.12 Test Performance for UNSW-NB15 dataset . . . . . . . . . . . . . . . . . . . . . 101
5.13 Normal vs Intrusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.14 Performance Difference of Proposed and Standard ANN for UNSW-NB15 dataset . 103
x

Abstract
Boosting is a generic statistical process for generating accurate classifier ensembles from only
a moderately accurate learning algorithm. AdaBoost (Adaptive Boosting) is a machine learning
algorithm that iteratively fits a number of classifiers on the training data and forms a linear com-
bination of these classifiers to form a final ensemble. This dissertation presents our three major
contributions to boosting based ensemble learning literature which includes two multi-class ensem-
ble learning algorithms, a novel way to incorporate domain knowledge into a variety of boosting
algorithms and an application of boosting in a connectionist framework to learn a feed-forward
artificial neural network.
To learn a multi-class classifier a new multi-class boosting algorithm, called M-Boost, has
been proposed that introduces novel classifier selection and classifier combining rules. M-Boost
uses a simple partitioning algorithm (i.e., decision stumps) as base classifier to handle a multi-class
problem without breaking it into multiple binary problems. It uses a global optimality measures for
selecting a weak classifier as compared to standard AdaBoost variants that use a localized greedy
approach. It also uses a confidence based reweighing strategy for training examples as opposed
to standard exponential multiplicative factor. Finally, M-Boost outputs a probability distribution
over classes rather than a binary classification decision. The algorithm has been tested for eleven
datasets from UCI repository and has consistently performed much better for 9 out of 11 datasets
in terms of classification accuracy.
Another multi-class ensemble learning algorithm, CBC: Cascaded Boosted Classifiers, is also
presented that creates a multiclass ensemble by learning a cascade of boosted classifiers. It does
not require explicit encoding of the given multiclass problem, rather it learns a multi-split decision
tree and implicitly learns the encoding as well. In our recursive approach, an optimal partition of
all classes is selected from the set of all possible partitions and training examples are relabeled.

The reduced multiclass learning problem is then learned by using a multiclass learner. This proce-
dure is recursively applied for each partition in order to learn a complete cascade. For experiments
we have chosen M-Boost as the multi-class ensemble learning algorithm. The proposed algo-
rithm was tested for network intrusion detection dataset (NIDD) adopted from the KDD Cup 99
(KDDâAZ99) prepared and managed by MIT Lincoln Labs as part of the 1998 DARPA Intrusion
Detection Evaluation Program.
To incorporate domain knowledge into boosting an entirely new strategy for incorporating
prior into any boosting algorithm has also been devised. The idea behind incorporating prior into
boosting in our approach is to modify the weight distribution over training examples using the
prior during each iteration. This modification affects the selection of base classifier included in the
ensemble and hence incorporate prior in boosting. Experimental results show that the proposed
method improves the convergence rate, improves accuracy and compensate for lack of training
data.
A novel weight adaptation method in a connectionist framework that uses AdaBoost to mini-
mize an exponential cost function instead of the mean square error minimization is also presented
in this dissertation. This change was introduced to achieve better classification accuracy as the
exponential loss function minimized by AdaBoost is more suitable for learning a classifier. Our
main contribution in this regard is the introduction of a new representation of decision stumps that
when used as base learner in AdaBoost becomes equivalent to a perceptron. This boosting based
method for learning a perceptron is called BOOSTRON. The BOOSTRON algorithm has also been
extended and generalized to learn a multi-layered perceptron. This generalization uses an iterative
strategy along with the BOOSTRON algorithm to learn weights of hidden layer neurons and output
neurons by reducing these problems into problems of learning a single layer perceptron.
ii

Chapter 1
Introduction
Classification refers to the assignment of one or more labels, from a discrete set of labels, to an
object of interest. For example, a voice activity detector used in speech coding systems assigns a
positive label to all speech frames that contain human voice activity and a negative label to frames
that contain background noise. An automatic cancer detection system might classify a medical
image as benign or malignant. An Optical Character Recognition system assigns to each segment
of an image a label from the set of printable UNICODE characters.
A method or program that can assign one or more labels to a given object is known as a clas-
sifier. A numerus set of systems need classifier(s) as a subcomponents to perform some useful
operations. Common examples of such systems include automatic speech recognition and coding,
spam detection, intrusion detection in computer networks, object detection in an image, handwrit-
ten character and digit recognition, automatic detection of disease, automatic fraud detection in
an online transection, document classification, human activity recognition, trend prediction in a
shares market, and object tracking systems etc.
While human beings are extremely good at classifying objects, the task of writing computer
programs for automatic classification proved out to be nontrivial. Learning from experience is a
fundamental ability of all living objects and especially the human cognition system demonstrates
1

an excellent example of a system that learns from past experience. The areas of Artificial intelli-
gence, machine learning, and pattern recognition have devised several computational realizations
of learning behaviour as demonstrated by living organisms. Developing useful methods for cre-
ating a classifier has been the single most important task that lies at the heart of learning from
experience and hence has resulted into several computational methods for building a classifier
under various learning settings.
1.1 Supervised Learning
A common framework for creating a classifier assumes that the classifier learning method takes
as input a set of pre-labeled objects. The learning method then uses these objects and the corre-
sponding labels to learn a classifier of a given form that can be used to assign correct labels to
previously unseen objects. This paradigm for automatic learning of a classifier from a set of la-
beled training examples is commonly referred to as supervised learning as it assumes that objects
have been pre-labeled by an expert supervisor, who is commonly a human. In this learning setting
each object x, commonly represented as a vector of measurements called features, is known as in
instance whereas the set of all possible instances is called the instance space and is denoted as X.
The instance x along with it’s actual label y is represented as an ordered pair (x, y) and is called a
training example.
Thus the supervised learning paradigm assumes that there is an unknown function, f(x), that
maps an instance x to its’ actual label y. A learning method L, called a learner, is provided with a
set of N training examples of the form (x1, y1), ..., (xN , yN) where xi is a vector representing the
object of interest in some n-dimensional instance space X and yi is its’ actual label. The learning
algorithm is required to use the available training data for computing a hypothesis function H(x)
that can approximate the unknown functional relation between the instance space X and the set
of labels. Quality of the learned hypothesis and hence that of the learner L can be estimated
2

by computing it’s performance on a separate set of test examples which is usually referred to as
the test accuracy of learned classifier. Some of the well studied supervised learning algorithms
include neural networks [72, 75], decision tree learning [32, 16], support vector machines [87,
93], probabilistic learning [19, 67], nearest-neighbour classifiers [21], and ensemble learning [10,
13, 27, 33, 35, 84, 91, 103] etc. These algorithms have been successfully used to build several
important systems of practical interest [65, 66, 70, 83, 95, 98].
1.2 Ensemble Learning
Ensemble learning has been one of the most active and applied area of research in the last two
decades [25]. An ensemble of classifiers combines the outputs of several, usually homogenous,
classifiers in some way (e.g. weighted majority voting or averaging) to produce a combined de-
cision about the class of an instance. In particular, Bagging [13] and Boosting [33] are the two
most popular ensemble learning methods in the machine learning literature. Bagging approach of
Breiman [13] selects several instances of a classifier by using bootstrap samples and compute the
final output by taking a simple average of individual classifier outputs. The sampling and averag-
ing steps of bagging tend to reduce the overall variance in classification and hence improves the
performance of the classifier [14, 26, 36].
Boosting based method, like AdaBoost [33], on the other hand maintains an adaptive weight
distribution Dt over training examples and use a learning algorithm to generate a classifier ht
that has optimal performance with respect to Dt. This distribution is modified after generating
each classifier such that the weight of examples misclassified by the classifier ht are increased and
weights of correctly classified examples are decreased. The final classifier,H(x) =∑T
t=1 αt.ht(x),
is formed by taking a linear combination of selected classifiers where the weight αt of classifier ht
in the linear combination depends on its’ training performance with respect to the distribution Dt
used to generate it.
3

AdaBoost based ensembles perform specially well when the individual classifiers have uncor-
related error and their accuracy is guaranteed to be better than random guessing. Particularly, In
the PAC setting, a boosting based ensemble of classifiers is guaranteed to have arbitrarily low error
if the base learning algorithm grantees an accuracy better than random guessing on every weight
distribution maintained on the training examples. Chapter 2 provides a detailed review of PAC
model of Learning, AdaBoost algorithm and introduces its’ several variants.
1.3 Dissertation Contributions
This dissertation presents our three orthogonal contribution in the area of ensemble learning which
includes
1. Two ensemble learning algorithms to handle multiclass learning problems.
2. A novel method to incorporate prior into a large class of boosting algorithms.
3. Boosting based learning of a feed-forward artificial neural network.
1.3.1 Handling Multiclass Learning Problems
Variants of AdaBoost that can handle multi-class problems usually follow two approaches; in the
first approach the algorithms use a multi-class learner (such as decision trees) to generate the
base classifiers, and in the second approach the algorithms break the multi-class learning problem
into several, usually orthogonal, binary classification problems. Each binary sub-problem is then
independently learned by using the binary version of the boosting algorithm and there outputs are
combined to form a multi-class ensemble. We have developed two new methods, M-Boost [5] and
CBC: Cascade of Boosted Classifiers [6], for learning a multiclass ensemble.
4
M-Boost Algorithm
M-Boost algorithm uses a simple partitioning algorithm (i.e., decision stumps) as base classifier to
handle multiclass problem without breaking it into multiple binary problems. This required con-
siderable modifications to the standard AdaBoost. The changes made to AdaBoost pertained to
the way a weak classifier is selected for addition into the ensemble, training example reweighing
strategy, and the way a classifier outputs its classification decision. The new algorithm was imple-
mented, tested, and compared with existing algorithms. Following are the novel features presented
in the new M-Boost algorithm that make it different from the existing algorithms:
Classifier Selection: M-Boost uses a global optimality measures for selecting a weak learner as
compared to standard AdaBoost variants that use a localized greedy approach.
Example Reweighing: M-Boost uses entropy and probability based feature reweighing strategy
for training examples as opposed to standard exponential multiplicative factor.
Combining Classifiers: M-Boost outputs a probability distribution over all classes rather than a
binary classification decision.
M-Boost was tested for several datasets from UCI repository [56] of machine learning datasets
and has consistently performed much better than the two corresponding boosting algorithms,
AdaBoost-M1 [33] and Multi-class AdaBoost [103] in terms of classification accuracy.
CBC: Cascade of Boosted Classifiers
CBC: Cascaded Boosted Classifiers is a generalized approach of creating a multiclass classifier by
using an implicit encoding the classes. It is different from the remaining methods in the sense that
earlier encoding based approaches required an explicit division of multiclass problem into several
independent binary sub-problems whereas CBC does not require such an explicit encoding, rather
it learns a multi-split decision tree and hence implicitly learns the encoding as well. In this recur-
5

sive approach, an optimal partition of all classes is selected from the set of all possible partitions
of classes. The training data is relabeled so that each class in a given partite gets the same label.
The newly labeled training data, typically, has smaller number of classes than the original learning
problem. The reduced multiclass learning problem can now be learned through applying any mul-
ticlass algorithm. For experiments we have chosen M-Boost as the multi-class ensemble learning
algorithm. In order to learn the complete problem, the above mentioned procedure is repeatedly
applied for each partition. The method has been applied to successfully build an effective network
intrusion detection system.
1.3.2 Incorporate Domain Knowledge in Boosting
In most real world situations, significant domain knowledge is available that can be used to further
improve the accuracy and convergence of boosting. An existing approach by Schapire et al. [82]
uses domain knowledge to generate a prior and use it to compensate for lack of training data by
introducing new training examples into the training dataset. Main shortcomings of this approach
are:
1. The impact of prior is significantly low when enough training data is available.
2. There is no effect of introducing prior on the convergence rate of the boosting algorithm.
3. The strategy for incorporating prior is specific to a fixed boosting algorithm and cannot be
applied to all boosting algorithms, in general.
We have devised an entirely new strategy for incorporating prior into any boosting algorithm
that overcomes all the aforementioned limitations of the existing approach. The idea behind incor-
porating the prior into boosting in our approach is to modify the weight distribution over training
examples using the prior during each iteration. This modification affects the selection of base clas-
sifier included in the ensemble and hence incorporate prior in boosting. The results show improved
6

convergence rate, improved accuracy and compensation for lack of training data irrespective of the
size of the training dataset.
1.3.3 Boosting Based Learning of an Artificial Neural Network
We have proposed a new weight adaptation method in a connectionist framework that minimizes
exponential cost function instead of the mean square error minimization, which is the standard
used in most of the perceptron/neural network learning algorithms. We introduced this change
with the aim to achieve better classification accuracy.
Our main contribution in this regard has been a new representation of decision stumps that when
used as base learner in AdaBoost becomes equivalent to a perceptron and is called BOOSTRON
[7]. BOOSTRON has been extended and generalized to learn a multi-layered perceptron with linear
activation function [8]. This generalized method has been used to learn weights of a feed-forward
artificial neural network having linear activation functions, a single hidden layer of neurons and
one output neuron. It uses an iterative strategy along with the BOOSTRON algorithm to learn
weights of hidden layer neurons and output neurons by reducing these problems into problems of
learning a single layer perceptron. Further generalizations of this method resulted into a learning
of a feed-forward artificial neural network that uses non-linear activation function and has multiple
output neurons.
1.4 Dissertation Structure
This dissertation has been organized into six chapters that include this introductory chapter fol-
lowed by chapter 2 that provides the preliminaries definitions and concepts related to ensemble
learning. A detailed account of PAC-learning, boosting and AdaBoost algorithm along with short
descriptions of several practical boosting and ensemble learning algorithms is also presented in
chapter 2. The chapter also lays down the foundation for the remaining chapters by identifying
7

some of the open problems that have been addressed in the remaining chapters.
Details of our new boosting style procedure, M-Boost, for learning multiclass ensemble with-
out breaking the problem into multiple binary classification problems are presented in chapter 3.
Discussion of M-Boost is succeeded with the presentation of a naive method of constructing a
CBC (i.e. Cascade structure of Boosted Classifiers) for learning a multiclass decision tree like
structure. Chapter 3 also presents applications and comparison of M-Boost and CBC with state-of-
the-art boosting algorithms using several commonly referred datasets from the machine learning
literature.
Chapter 4 presents an effective way of incorporating prior into boosting based ensembles. Ex-
perimental results, on several synthetic and real datasets, are also provided in that chapter that
provide empirical evidence of the methods’ effectiveness. These results show significant improve-
ment when the domain knowledge, provided by experts in the form of rules or extracted from the
data, is incorporated into boosting. Proposed method mitigates the necessity of large training data
and improves the convergence and performance of a large family of boosting algorithms.
A novel boosting based perceptron learning algorithm, BOOSTRON, is presented in chapter
5 that uses AdaBoost along with a new representation of decision stumps by using homogenous
coordinates. The chapter also presents several extensions of BOOSTRON for learning a multi-
layer feed-forward artificial neural network with linear and non-linear activation functions. This
chapter concludes with the detailed experimental settings and the corresponding results used to
compare the performance of proposed methods with standard neural network learning algorithms
including the perceptron learning algorithm and error back-propagation learning.
Finally, chapter 6 concludes the discussion by summarizing our contributions and providing
some of the future research directions.
8

1.5 List of Publications
Following publications have resulted from our research work presented in this dissertation.
1. Baig, M., and Mian Muhammad Awais. "Global reweighting and weight vector based strat-
egy for multiclass boosting." Neural Information Processing. Springer Berlin Heidelberg,
2012.
2. Baig, Mubasher, El-Sayed M. El-Alfy, and Mian M. Awais. "Intrusion detection using a
cascade of boosted classifiers (CBC)." Neural Networks (IJCNN), 2014 International Joint
Conference on. IEEE, 2014.
3. Baig, Mirza M., Mian M. Awais, and El-Sayed M. El-Alfy. "BOOSTRON: Boosting Based
Perceptron Learning." Neural Information Processing. Springer International Publishing,
2014.
4. Baig, Mirza Mubasher, El-Sayed M. El-Alfy, and Mian M. Awais. "Learning Rule for Linear
Multilayer Feedforward ANN by Boosted Decision Stumps." Neural Information Process-
ing. Springer International Publishing, 2015.
9

Chapter 2
Preliminaries
Concept learning or binary classification has been at the core of machine learning. A concept is a
partition of an underlying domain of instances, X , into two disjoint parts Xc and Xc. This chapter
introduces the PAC model of learning which provides a theoretical foundation for concept learning.
Following the discussion of PAC model, the chapter presents some it’s extensions including the
weak model of learning. The most important idea of the equivalence of weak and PAC learnability
is also presented that resulted into several early boosting and ensemble learning algorithms.
Discussion of the relevant learning models and the introduction of concept boosting is is suc-
ceeded with a brief review of AdaBoost and some of the related concept boosting algorithms.
AdaBoost algorithm is a concept boosting algorithm and hence can be used to create binary clas-
sifiers only. This chapter also presents some of the extensions of basic AdaBoost algorithm which
can be used to handle multiclass learning problems. This brief review of boosting literature is
succeeded by the presentation of our proposed model,M−PAC model to handle learnability of
a multi-class classifiers
10

2.1 PAC Model of Learning
This section provides a brief overview of the PAC model of learning [92] and also reviews some
important extensions of the learning model. The PAC (Probably Approximately Correct) model
gives a precise meaning to the notion of learnability of a concept c and to that of a class of concepts
C. Learning protocol of the PAC model assumes that a learning algorithm L has access to an
example oracle EX(c;D). L uses the oracle to obtain labeled points (x, c(x)) sampled from
the domain of a concept c. These labeled points are called training examples and are assumed
to be chosen independently from the domain by using a fixed but unknown distribution D. The
labels, c(x), of the instances are assumed to be computed using an unknown concept c. Given
these training examples, the job of L is to accurately estimate the unknown concept c using some
approximate representation of concepts in C. A concept class C is said to be learnable by an
approximate representation of it’s concepts if an algorithm exists that can accurately and efficiently
learn every concept c ∈ C.
A formal definition of PAC learning uses the notions of an instance space, a concept class,
representation and size of a concept, and the notion of a hypotheses space.
An instance space X is a set of encodings of all objects of interest and is the domain of a set of
concepts. For example, X might be encoding of all Boolean valued functions or it might be a set
representing all patients in a hospital where each patient is represented as an ordered pair of some
measured features.
A concept c is a subset of the instance space X and is equivalently defined as a characteristic
function Xc or as a Boolean function defined on the instance space. A concept c defined on an
instance space X partitions it into two disjoint subsets. For example the set of all patients suffering
from a certain disease defines a concept.
A concept class C is a collection of concepts defined on an instance space X . Often the concept
class is subdivided into disjoint subclasses Cn where n = 1, 2, . . . such that the concept class C is
11

the union of the subclasses Cn and all the concepts in Cn are defined on a common domainXn ⊂ X .
For examples, if the concept class C is the set of all boolean formulas then Cn might denote all
Boolean formulas having exactly n variables and Xn will denote the truth assignments to the n
variables. The subscript n typically denotes the size or complexity of the concepts in Cn. It is
important to note that the size of a concept is measured assuming some reasonable representation
of the concept. For example, if the instance space is X = {0, 1}n and the concept to be represented
is a boolean function of n variables then this concept can either be represented as a truth table or
as a simplified formula in n boolean variables. Clearly the size of representation when such a
concept is represented as a truth table is exponentially larger than the size of representation if it is
represented as a simplified function of n boolean variables.
Another important notion used in the definition of PAC model is that of the representation of
hypotheses space H. The estimate of a concept generated by the learning algorithm L is called
a hypothesis and is denoted as h. The set of all possible hypotheses that might be generated by
L is called a hypotheses space of the learning algorithm. Separate representation of a concept
c and that of a hypothesis h is important as the learnability of a concept class C depends on the
representation of hypotheses class H as well. For example, the concept class of all 3-term DNF
formula is not efficiently PAC learnable if the learning algorithm produces a 3-term DNF formula
as the hypothesis but it is efficiently PAC learnable if the learning algorithm is allowed to output a
3-term formula in CNF form [52]. Given the above notions, the PAC model can be fomally defined
as given by Kearns and Vazirani [52]
Definition 2.1.1. A concept class C defined over an instance space X is said to be PAC learnable
using a hypothesis classH if there exists an algorithm L such that for every 0 < ε ≤ 12, 0 < δ ≤ 1
2,
concept c ∈ C, and distribution D over X , the algorithm L uses the oracle EX(c;D) to generate
training examples of the concept and with probability at least 1- δ, outputs a hypothesis h ∈ H that
satisfies errorD(h) < ε. Further more the algorithm must uses a polynomial number resources
(i.e. examples and computations), a polynomial in 1ε, 1δ
and size of the c, to learn the concept.
12

The error of the learned hypothesis is measured in terms of the difference between the predic-
tion of learned hypothesis h and that of unknown concept c. This error is measured using the same
distribution D on the instance space X that was used to generate the examples by using the oracle.
As the PAC model assumes that the learning algorithm will get the training data using a sam-
pling distribution therefore it might fail due to the possibility of occurrence of a non-representative
sample. The model, therefore, uses the parameter δ as a measure of confidence on the learning
algorithm. A smaller value of δ means that the learning algorithm must mostly be successful in
finding a suitable hypothesis whereas a larger value means that the algorithm is allowed to fail in
finding the correct hypothesis more often. The second parameter ε controls the error threshold so
that a smaller value of ε requires that the learning algorithm must generate a better hypothesis. It
is obvious that smaller values of these parameter would make the learning algorithm uses a larger
sample and hence use more computational resources as well. The model therefore allows the use
of more computational resources as the values of these parameters become smallers but bounds the
growth of resources by a polynomial.
Since it’s introduction the PAC model by Valiant [92] has been one of the most important
paradigm of learning that has attracted the attention of many researchers [40, 48, 49, 50, 51, 68, 77].
A major area of research in PAC learning framework is to characterize those classes of concepts
that are PAC learnable and those that are not. Valiant [92] proved that some non-trivial classes of
Boolean functions including k-CNF and monotone DNF are efficiently learnable. Schapire [76]
and Mitchell [60] proved that pattern languages are not PAC learnable.
Several extensions of PAC model have also been proposed in literature. As the the sampling
distribution used by the oracle is assumed to be arbitrary therefore the PAC learning model is com-
monly referred to as distribution-independent or distribution-free learning. In an important variant
of PAC model, called distribution specific learning model, it is assumed that the distribution D
used by the oracle Ex(c,D) is fixed and is known to the learning algorithm. For example we
might assume that the oracle Ex(c,D) uses the uniform distribution to generate the training ex-
13

amples. Another important variant of PAC learning model, called weak learning, was introduced
by Kearns and Valiant [50] that requires the learning algorithm to output a hypothesis that might
not be arbitrarily accurate. This model relaxes the strong requirement of learning a vary accurate
hypothesis so that the learning algorithm L is only required to output a hypothesis h that has ac-
curacy just batter than a pre-determined threshold like random guessing and depending upon the
complexity of the concept to be learned the error can be arbitrarily close to 12.
Formally a concept class C is said to be weakly learnable by a hypothesis class H if there
exists a polynomial P and a learning algorithm L such that for any concept c ∈ C, the learning
algorithm L when given access to a tolerance parameter δ and an example oracle Ex(c,D) outputs
a hypothesis h that with probability at least 1− δ has error < 12− 1
P (|c|) where |c| denotes the size
or complexity of the concept c.
Kearns and Valiant [50] also proved various interesting results for the weak learning model
including the fact that even the weak learnability of a certain concept class implies that the famous
encryption standard RSA can be efficiently inverted and the fact that for distribution specific case
the notion of weak learnability and strong/PAC learnability are not equivalent. They also posed
the problem of boosting the accuracy of a weak learning algorithm so that for any concept for
which a weak learning algorithm exist is PAC learnable.
The question of equivalence of weak learning and PAC learning was finally addressed by
Schapire [77] who used the idea of majority voting and that of example filtering to produce a
strong learner from weak learning algorithm. Schapire [77] fully exploited the distribution free
nature of weak learning model and used a recursive hypothesis boosting procedure that used sev-
eral instances of the weak hypothesis each generated by using a filtered set of training examples.
Finally, the generated hypotheses were then combined using a majority vote to generate a single
hypothesis that has arbitrarily low error. Further, his construction of strong hypothesis is efficient
in the sense that the number of weak hypotheses needed to build a strong hypothesis is not expo-
nential. Although the construction of a strong hypothesis as presented by Schapire [77] proved the
14

equivalence of strong and weak learnability but the first set of practical boosting algorithms was
presented by Freund [31]. He suggested two strategies, Boosting by sub-sampling and Boosting by
filtering, for improving the accuracy of a weak classifier. Unlike the work of Schapire FreundâAZs
algorithm was not recursive and used a single majority vote of the weakly learned classifiers to
construct the strong classifier.
Based on the ideas of Freund [31] a general method technique of constructing a very accu-
rate ensemble by combining several instances of a moderately accurate learning algorithm was
presented by Freund and Schapire [33]. This method is commonly referred to as AdaBoost (i.e.
adaptive boosting) and has been a subject of intensive theoretical and practical research in the last
two decades [1, 23, 34, 44, 73, 53, 84, 59, 85, 79]. AdaBoost uses the idea of re-sampling of
training examples by using adaptive distributions and creates an accurate hypothesis by generating
and combining several weak hypotheses by using the adaptive distributions. A detailed description
of AdaBoost and some of it’s variants is presented in the next section which starts with the intro-
duction of AdaBoost as a generic method of creating a classifier ensemble. Extensions of the basic
AdaBoost to handle multiclass learning problems are also presented in the next section.
15

2.2 Review of Boosting Algorithms
Boosting is a technique for generating a very accurate (strong) estimate of a classifier/function
from an estimation process that has modest accuracy grantee. The idea of boosting emerged in
the PAC setting, as described in the previous section, and since the introduction of AdaBoost by
Freund and Schapire [33] it has become a general technique for generating an improved classifier
by using a weak classification algorithm. The main idea underlying most the boosting algorithms
is to construct a strong classifier by using many weak classifiers and then combining their outputs
using majority vote. This section starts with a detailed description of AdaBoost algorithms that
can be regarded as the first practical boosting algorithm. Description of AdaBoost precedes the
description of it’s theoretical properties and extensions of the AdaBoost algorithm devised to build
a multi-class ensemble.
2.2.1 AdaBoost Algorithm
AdaBoost belongs to the family of supervised learning algorithms and hence uses a set of training
examples (x1, y1), . . . , (xN , yN). Each training example consists of an instance xi chosen from an
instance space X , and the corresponding class label yi. In it’s basic form AdaBoost is a concept
learning algorithm hence the labels yi are taken from a set Y = {+1,−1}.
AdaBoost works iteratively and in each iteration it uses a weak learning algorithm to generate an
instance ht of weak classifier. The key idea used by AdaBoost is to choose a new training set for
learning each new classifier. To select a classifier it maintains a weight distribution Dt over the
provided training examples with the weight of an example measures the importance of correctly
classifying that example. This weight distribution is initially uniform and in each iteration it is
modified so that the weight of incorrectly classified examples are increased and those of correctly
classified examples decreased.
16

Pseudocode of the AdaBoost algorithm [33] is given as Algorithm 1. Input to this algorithm
consists of N labeled training examples {(xi, yi) i = 1...N } and a parameter T to specify total
number of weak classifiers to be used to form a strong classifier. Output of this algorithm is an
ensemble, H(x) =∑T
t=1 αt.ht(x)), made up of a linear combination of T classifiers generated by
using a weak learning algorithm. The sign of H(x) is regarded as the class being predicted by the
ensemble. AdaBoost uses a learning algorithm to generate a base classifiers instance ht using the
distributionDt. This weight distribution is modified in each iteration so that the outputs of classifier
instance ht are exactly uncorrelated with the modified distribution. A linear combination of the
selected classifiers is then formed to output the final ensemble H(x). Value of mixing parameter
αt, in the linear combination, is computed by using the error, εt, of the classifier instance ht w.r.t.
the distribution Dt used to generate it.
Algorithm 1 : AdaBoost [33]
Require: Examples (x1, y1) . . . (xn, yn) wherexi is a training instance and yi ∈ {−1,+1} andparameter T = total base learners in the ensemble
1: set D1(i) = 1n
for i = 1 . . . n
2: for t =1 to T do3: Select a classifier ht using the weights Dt4: Compute εt = Pr[ht(xi) 6= yi] w.r.t Dt5: set αt = 1
2log(1−εt
εt)
6: Set Dt+1(i) = Dt(i) exp(−αtyi.ht(xi)Zt
where Zt is the normalization factor7: end for8: output classifier H(x) = sign(
∑Tt=1 αt.ht(x))
Due to its simplicity and adaptive behavior, AdaBoost has been the most successful boosting al-
gorithm and as described by Breiman [13], boosted decision trees are the best of-the-shelf-classifier
in the world. It has been validated, empirically, that it works well one many tasks in the sense that
boosted classifiers show good generalization and hence the method shows resistance to over fitting.
However, Friedman et al. [35] showed that under noisy conditions AdaBoost has the undesirable
17

property of over-fitting. In such a situation, the weight update mechanism of AdaBoost assigns
very hight weights to noisy training examples and hence the algorithm diverges. A few regular-
ization methods have been proposed by various researches to overcome such problems. These
include the Gentle and Modest variants of AdaBoost [94]. There has also been an effort to prove
the correctness of the AdaBoost by proving that the solution provided by AdaBoost converges to
the optimal margins [81, 37]. Rudin et al. [73] proved a cyclic behavior in its convergence and also
constructed an example demonstrating that it might not always converge to the optimal margins.
2.2.2 Multi-class Boosting Algorithms
Many of the learning tasks can be formulated as task of assigning a label from a finite set S of
labels. If the size of S is 2 the learning task is said to be a binary classification task and if it is
greater than 2 it is called a multi-class learning task. So in a multi-class learning task the learning
algorithm is required to estimate a function that can take values from a finite set, {c1, c2 . . . ck},
of size k > 2. For example, in a digit recognition task the learning algorithm has to estimate a
function from the instance space X (some representation of images as features) into ten different
classes and in speech recognition a learner might have to estimate a function for classifying an
instance as belonging to a large (40 to 50) number of basic sounds (Phonemes) of the language.
Like concept learning, the supervised learning of multi-class requires that the learner, after
having access to a representative sample of labeled examples from the instance space, accurately
estimate the function for assignment of labels to unseen instances. Many learning algorithms, like
decision trees and C4.5 can directly handle the multi-class case and output an appropriate label for
an instance but for some of the learning algorithms like Boosting, the multi-class generalizations
are not as effective as the binary classification. Various ways to cast a multi-class problem as
a number of binary problems can be used. One simple approach is to learn one classifier per
class by treating all instances of that class as +ve instances and treating all other instances as ve
instances (one verses all). The final hypothesis can then be selected by combining the learned
18

classifiers. For example, to handle the digit recognition problem 10 different classifiers are learned
and the final 10-class classifier might be constructed by considering the confidence/ margin of the
instance from all the classes. Another approach, called one verses one (or all pairs), for solving
multi-class problem using binary classifiers is to consider all pairs of class and built a classifier for
discriminating between the two classes. So to build one k-class classifier we learn O(k2) binary
classifiers. Any new instance x is assigned to the class that gets maximum score when all the
classifiers are used for classifying x. An obvious drawback of the above scheme is that a large
number of binary classifiers are need i.e. O(k2) for constructing one k class classifier.
Dietterich and Bakiri [28] proposed a general strategy for extending binary classification to
multi-class case. They suggested a scheme based on the use of an Error Correcting Output Coding
(ECOC) to convert a multi-class problem into a set of binary classification problems. In this
method a binary code of length l is assigned to each class and a coding matrix of dimension
m x l is generated such that each row of the matrix represent exactly one class. The codes are
assigned in a systematic way to maximize the separation between rows/columns of the matrix
M so that it has good error correcting capabilities. Corresponding to each column of the coding
matrix M a binary classifier is trained hence l binary classifiers are trained. To classify a new
instance the learner uses the l classifiers to generate a code of length l for that instance. The final
classifications task is performed by identifying the row of M that is most similar to the coding of
the unseen instance. The similarity between the classes and the instance can be measured using
Hamming distance (or any other measure of similarity of binary strings) between the two binary
strings. One advantage of the above framework for constructing multiclass classifiers from binary
classifiers is the simplicity of the idea and ease of implementation. Also the Empirical evidence of
its success in creating robust and accurate multi-class classifiers is in abundance. A disadvantage
of the above method is that while combining the binary classifiers for constructing a multi-class
classifier, accuracy, variance and confidence of different binary classifiers are not considered i.e.
all binary classifiers are treated equally. Also the search space for constructing the coding matrix
19

is exponential and searching for an optimal matrix is NP-complete. An improvement of the above
mentioned scheme was suggested by Allwein et al. [2] which combines one verses one, one verses
all and ECOC scheme to give a unified scheme for using binary classifiers to construct k-class
classifier for k > 2. There improvement also considers the margins of the examples from the
classifiers while combining the binary classifiers to construct k-class classifier.
2.2.3 Incorporating Prior Knowledge in Boosting Procedures
Several different variants of AdaBoost have been proposed in literature that assign weights to
classifiers/examples differently or use different criteria for selecting the base classifier ht in each
iteration [33, 84, 18, 5, 35]. Most variants of AdaBoost do not allow the direct use of prior knowl-
edge for building the ensemble. To incorporate prior knowledge into boosting Schapire et al. [82]
presented a method of using prior knowledge to generate additional training examples using the
prior and hence incorporate prior knowledge into boosting. Their method is useful for compen-
sating the shortage of training data and has been used for call classification, spoken dialogue clas-
sification and for text categorization problems [70, 83, 82]. To incorporate the prior knowledge
into AdaBoost the prior knowledge is expressed as a probability distribution giving conditional
probability distribution of the labels given the examples i.e. the prior knowledge is expressed as
the probability distribution π(y|x) over the possible label values, where y is a label and x is the
example/instance.
2.3 Closure Properties of PAC learnable Concept Classes
2.4 Learning Multiple Concepts
Although binary classification has been at the core of machine learning but many learning tasks re-
quire that the learner must classify an input instance as one of the k (k > 2) classesCi i = 1, 2 . . . k
20

for example for classifying the input images as one of the ten digits require that k=10. The PAC
framework of learning is a statistical setting for the learnability of a binary concept with arbi-
trary accuracy and, as suggested by Valiant [92]. It does not take into account the values of pre-
programmed concepts or the values of previously learned concepts. So the definition of success-
fully learning a concept does not consider the effect of the newly learned concept on the existing
concepts and vice versa. In this section we propose an extension of PAC learning framework called
m − PAC learning that takes into account the learning of multiple concepts simultaneously and
learning concepts in a sequence (certain order) or in the presence of already learned concepts.
To handle the learning of multiple concepts simultaneously we propose a generalization of the
PAC framework called m− PAC learning. It is shown that m− PAC is a strict generalization of
PAC model in the sense that every m−PAC class is PAC learnable but the converse may not true.
A formal description of m− PAC framework is provided below.
2.4.1 m-PAC Learning
In the m-PAC framework the learner has access to a set EX1, EX2EXm of oracles where each
of the EXi is a set of examples of the concept Ci, chosen from the instance space X using an
unknown but fixed distribution Di. The job of the learner is to output a hypothesis h such that the
sum of the probability masses of Di contained in the region where the learned hypothesis h and
the concept Ci differ is negligible. Formally, a concept class C defined over the instance space X
is said to be m − PAC learnable if it is (m − 1) − PAC learnable and there exists a learner L
such that for every subset Cm = c1, c2, . . . , cm of C, any set of distributions D1, D2, . . . , Dm on X ,
any ε > 0 , 0 < δ < 1 the learner L with probability (1 − δ) outputs a hypothesis h such that
Ph(v)4c(v)vDii < , i = 1, 2Lm and the number of examples used by L is polynomial in n, 1ε,1δ,
and s where s is the measure of complexity of Cm. It is easy to see that s = maxs1, s2, . . . , sm
where si is the size of ci. An important difference between PAC and m − PAC is the following.
An instance can only have one label in the PAC setting, as it either belongs to the concept or does
21

not, on the other hand an instance in m− PAC setting might have more than one label associated
with it, as it might belong to many concepts simultaneously. It is also easy to see that m − PAC
learning and PAC learning are not non-equivalent in that a PAC learnable concept class might not
be m-PAC learnable. The precise result is stated in the following theorem
Theorem 2.4.1. Any concept that is m-PAC learnable is also (m-1)-PAC and hence PAC learnable
but the converse may not true in general.
The main idea of the proof is that increasing the number of simultaneous concepts to be learned
can only increase the error of the learned hypothesis and hence if there is a set of m-1 concepts that
is not learnable with arbitrary accuracy then including another concept in that set can not increase
the accuracy of any hypothesis.
For the converse part you can consider two concept c1, c2 belonging to a PAC learnable concept
class C such that c1 and c2 are overlapping. Then for the two distributions D1 and D2, defined
over the instance space for generating examples of the two concepts such that D1 and D2 both put
non-zero probability mass in the common region of the two concepts, both c1 and c2 can not be
learned simultaneously with arbitrary accuracy.
So the m-PAC learning is a strict generalization of PAC model and the two models are not
equivalent.
22

Chapter 3
Multiclass Ensemble Learning
3.1 Introduction
AdaBoost algorithm discussed in the previous chapter is a concept learning algorithm therefore,
in its basic form, it produces a classifier to discriminate between two classes. Several important
real-word classification problems, however , require a classification decision involving more than
two classes. Examples of such problems include a hand written digit/character recognition system
involving more than 10 classes, a spoken dialogue recognition system that might need to discrimi-
nate between several basic sounds called phonemes, an automatic document classification system
might need to discriminate between documents belonging to a large number of classes and an ef-
ficient speech coding system might need to classify each speech frame as belonging to one of the
three classes voiced, unvoiced, and background noise etc.
Boosting literature present several extensions of AdaBoost [33, 77, 78, 84, 103, 39] that can
handle multi-class learning problems. Detailed description of some of these variants is given in a
previous chapter that presents a detailed review of boosting literature. These multiclass extensions
of AdaBoost can be broadly categorized into two sets. First set of variants consists of boosting
algorithms that use a multiclass base learner, such as a decision tree, to handle a multiclass learning
23

problem. AdaBoost-M1 [33] and Multi-Class AdaBoost [103] are two most widely used boosting
algorithms in this set. AdaBoost-M1 is the first direct multiclass extension of standard AdaBoost
which uses a multiclass base learner along with the following classifier combining rule:
H(x) = argmaxy
(T∑t=1
(αt.ht(x) = y)
)(3.1)
This combining rule results into a classifier that makes the class with maximum weight the pre-
dicted class for the instance x. AdaBoost-M1 performs well with strong base classifiers but, as
shown by Zhu et al. [103], this multiclass variant of AdaBoost diverges if the accuracy of base
classifier becomes less than or equal to 50%. Zhu et al. [103] modified the computation of weight-
ing factor, αt = 0.5[log( εt
1−εt )]
of AdaBoost-M1 so that it’s value remains positive as long as the
accuracy of base classifier is better than random guessing. Boosting algorithm that results by incor-
porating this change is most commonly known as the Multiclass AdaBoost and is state-of-the-art
boosting algorithm belonging to the first set of multiclass variants of AdaBoost.
Multiclass extensions of AdaBoost belonging to the second set of variants breaks a multiclass
learning problem into several, usually orthogonal, binary classification problems. These binary
problems are typically obtained from the multiclass problem by using a binary encoding of class
labels and each bit of these labels is used to form a new binary classification problem. Each
binary subproblem is then independently learned by using the binary version of AdaBoost and
their outputs are combined to form a multiclass ensemble. A general framework for dividing
a given multiclass learning problem into several binary classification problems has been given
by Dietterich and Bakiri [28]. Several multiclass boosting algorithms including AdaBoost-MH,
AdaBoost-L and AdaBoost-MO belong to this class of multiclass boosting algorithms [78, 84].
AdaBoost-MH can be considered as the state-of-the-art multiclass extension of AdaBoost that
works by minimizing the hamming distance between the codes assigned to various classes and the
predicted codes. Schapire and Singer [84] have suggested several refined strategies of selecting a
24

classifier, determining the weight of a classifier, and for combining the classifiers to form the final
ensemble.
3.2 Multi-Class Boosting Contributions
This section presents a novel multiclass boosting algorithm, M-Boost that can handle multiclass
problems without breaking them into multiple binary learning problems. M-Boost differs from
the existing algorithms in selecting the weak classifiers, assigning weights to the selected weak
classifiers, adaptively modifying weights of the examples, and building the ensemble through the
output of selected weak classifiers. The proposed algorithm uses a significantly different reweigh-
ing strategy to modify the distribution maintained over the training examples as compared with the
standard boosting algorithms. Unlike all boosting algorithms which use localized greedy approach
for reweighing the examples, M-Boost
· uses a global measure to reassign weights to the training examples
· computes a vector valued weight for each classifier rather than computing a single real valued
weight for a classifier
· uses a different criterion for selecting a base classifier which is based on a global measure of
error instead of the local greedy approach
· creates an ensemble that outputs a probability distribution on classes
Presentation of M-Boost is followed by the description of our second approach for creating a
boosting based multiclass ensemble. This method ,called Cascade of Boosted Classifiers, builds a
multiclass classifier by the recursive use of an existing multiclass or binary classification algorithm
such as M-Boost or AdaBoost. This approach results into a multiclass classifier that can either be
viewed as a decision tree structure or as a dynamic way of dividing a multiclass learning problem
into multiple smaller multiclass/binary learning problems.
25

3.2.1 M-Boost Algorithm
This section presents a detailed description of the M-Boost algorithm that uses a decision stump
based probabilistic classifier as base learner to create a multiclass ensemble without dividing the
problem into multiple binary classification problems.
The M-Boost algorithm, shown as Algorithm 2, maintains a weight distribution Dt over the
training examples and modifies the distribution in each iteration so that misclassified examples
have larger weight in the succeeding iteration. It also maintains a probability density over classes
for each example xi, yi and assumes that for each instance xi the weak classifier ht outputs a
density p(cj|xi) over the k possible classes. For each instance xi, a weighted combination of the
output probabilities is used to compute a final distribution over the classes. Each instance xi is then
labeled with its most probable class.
This distinguishing features of M-Boost algorithm including
1. criterion for weak classifier selection
2. computation of weight α of the selected weak classifier
3. weight reassignment strategy of the instances
4. method of combining the selected classifiers to build the ensemble
are described in detail in this section.
Weak classifier selection
All variants of AdaBoost [33, 77, 84, 78, 103] work iteratively and use a running distribution Dt
over the training examples for selecting a locally ”optimal” weak learner ht. Most of these variants
based their choice of optimality on the error of ht w.r.t Dt so that the classifier with minimum error
is selected in each iteration. AdaBoost-MH [84] uses a slightly different criterion for selecting the
26

base classifier and selects a classifier that minimizes Zt defined ass
Zt =n∑i=1
Dt(i).exp(−αt.yi.ht(xi)). (3.2)
While AdaBoost and its variants use localized greedy approach for selecting a base classifier,
M-Boost uses a mix of global and local optimality measures for selecting a weak learner. It selects
the weak classifier ht that minimizes the error of partially learned ensemble
Ht(x) =t∑l=1
αl.hl(x) (3.3)
w.r.t the running distributionDt It is global because the error ofHt is minimized and local because
the error is minimized w.r.t the running distribution Dt. This approach is based on the observation
that in the best case (i.e. zero classification error) the globally optimal classifier will have no error
w.r.t any distribution on the training examples. It is important to note that minimizing equation
3.3 requires that in each iteration the base learner must be able to use the predictions of previously
learned classifier (i.e. Ht−1 =∑t−1
l=1 αl.hl) for selecting a classifier ht.
Decision Stump as Base Learner
It is well known that the domain partitioning algorithms like decision stumps can be easily mod-
ified to output class probabilities instead of a class predictions [16]. To estimate the conditional
probability p(cj|x) for a given partition, the weight Wj of class j instances and the total weight W
of all instances in the partition are used to compute the class probability using
p(cj|x) =Wj+β
W+k.β
The constant β is set to a small smoothing value so that no class gets a zero probability and hence
is not completely ignored.
To incorporate the proposed optimality criterion of selecting the weak classifier note that for
27

decision stumps it is possible to fold the computation of α into the stump learning algorithm so
that equation 3.3 is directly minimized.
Computing weight αt
The computation of αt is an important steps in all boosting algorithms as it is used to modify the
weight distribution Dt in each iteration and also to compute the weight of each classifier to build
the final ensemble. The existing multiclass boosting algorithms compute a real valued weight αt
based on the error of ht w.r.t. Dt. This weight computation does not reflect the accuracy of ht for
individual classes. To overcome this limitation, the computation of αt in M-Boost is based on the
observation that for a k-class learning problem, when k is large and the base learner is naive, the
accuracy of a weak learner is usually reasonable only for a few classes.
Therefore M-Boost computes a weight vector αt = (α1t , α
2t . . . α
kt ) instead of a single real val-
ued weight. The coefficient αjt of this weight vector is the weight of ht for class j and is computed
using the error εtj of ht for class j. The error is the sum of weights of false positive and false neg-
ative examples of this class w.r.t the running distribution Dt. The value of εtj is used to compute
the coefficients αjt = 12log(
1−εjtεjt
)
Weight reassignment
In each iteration the weight reassignment process of boosting algorithms adjusts the weights of
the training examples such that, in the succeeding iteration, the weights of incorrectly classified
examples become exponentially larger than the weights of correctly classified examples. The ex-
isting boosting algorithms modify the weight distribution Dt by using the multiplicative factor
exp(−αt[ht(xi) 6= yi]) where [ht(xi) 6= yi] is 0 if false and 1 if true.
Similar to AdaBoost-MH [84] which uses confidence rated predictions, M-Boost uses both the
prediction confidence and the accuracy for recomputing the weights of the training examples. M-
Boost, however, differs from AdaBoost-MH in employing partially built ensemble Ht instead of
28

the recently learned classifier ht. This weight reassignment is based on the observation that, for
larger values of t, most of the training examples that are misclassified by ht are correctly classified
by Ht with high confidence. Therefore, the examples misclassified by Ht must get more weight in
these iterations rather than the examples misclassified by ht. To reassign weight to an example xi
M-Boost usesEntropy(xi), a measure of confidence, and probability p(yi|xi) associated with each
example xi rather than using confidence rating only. M-Boost uses the distribution pxi maintained
over classes for each example xi and computes the Entropy
Entropy(xi) =k∑l=1
pxil log(pxil ). (3.4)
This distribution is initialized to uniform distribution and in each iteration the partially learned
classifier Ht is used to reassign the probability values pxil for each xi where l = 1, . . . , k. The
values of Entropy(xi) and p(yi|xi) are then used to compute a function Ct(xi)
Ct(xi) =
√Entropy(xi)
p(yi|xi)(3.5)
Ct(xi) is a measure of accuracy and confidence of Ht in classifying an example. The intuitive
justification for computing Ct(xi) is briefly explained below.
The relationship between the entropy associated with an example xi and the p(yi|xi) for a 20
class problem is shown in Figure 3.1(a). This figure plots the maximum value of entropy for a
given value of probability assigned to the actual class. The maximum value of entropy is obtained
by uniformly distributing the remaining probability (1 − p(yi|xi)) among the other classes. The
value of entropy for an example xi is small if p(yi|xi) is large and large otherwise.
M-Boost recomputes the weight of a training example xi using
Dt+1(i) = exp(αyit Ct(xi))/Wt (3.6)
29

where αyit depends on the accuracy of ht for class yi, and Wt is a normalization factor. The
reassignment of M-Boost, unlike the standard AdaBoost, depends on Ht and also the weights
are not updated using multiplicative factors but are recomputed. Figure 3.1((b) to (f) ) plots the
relationship between weight assigned to an example xi and the entropy associated with xi, for
various values of p(yi|xi).
Algorithm 2 : M-Boost Algorithm
Require: Examples (x1, y1) . . . (xn, yn) wherexi is a training instance and yi ∈ {−1,+1} andparameter T = total base learners in the ensemble
1: set D1(i) = 1ni = 1 . . . n set pxil = 1
kl = 1 . . . k for each xi
{Weight distributions over training examples and classes for each example xi}2: for k =1 to T do3: Use the weights Dt to learn a weak classifier instance ht so that the error of partially learned
classifier Ht =∑t
j=1 αj.hj is minimum w.r.t. the weight distribution Dt
4: Compute error εlt of classifier ht for class l = 1, 2, . . . , k
5: set αt = (α1t , α
2t , . . . , α
kt ) where αlt = 1
2log
1−εltεlt
6: [Recompute weights distribution]
6.1 set Entropy(xi) =∑k
l=1 pxil log(pxil )
6.2 set Ct(xi) =√
Entropy(xi)p(yi|xi)
6.3 set Dt+1(i) =exp(α
yit .Ct(xi))
WW being the normalization factor
7: end for8: Output the final Ensemble HT (x) that computes a distribution over classes.
Class with maximum probability is the predicted class.
In general the examples classified with low confidence (i.e. high value of entropy) get higher
weight than the examples classified with high confidence (i.e. low entropy). The weight reassign-
ment is such that the weight of an example xi is significantly higher, if p(yi|xi) has small value and
entropy is large, than the case when p(yi|xi) is small but entropy is also small (Figure 3.1-(b) ). So
the example classified with low confidence gets much higher weight than the examples incorrectly
30

classified with high confidence. On the other hand Figure 3.1-(g) shows the weight distribution for
an example correctly classified with high probability assigned to the actual class. In this case the
maximum value of entropy is much smaller than the corresponding values in Figure 3.1-(b).
The weight reassignment method suggested in this paper is significantly different from the
weight update strategy of AdaBoost-MH, [84] which assigns exponentially larger weight to ex-
amples misclassified with high confidence, and is somewhat similar to the strategy of [31] which
ignores some of the misclassified examples completely in each round of boosting.
Building the final ensemble
M-Boost outputs probability density P xt for each instance x over the k classes. These probabilities
are combined in an additive fashion to compute the final estimate of probability for each class us-
ing
p(l|x) =∑T
t=1 αlt.h
lt(x)
S.∑T
t=1 αlt
.
where hlt is the probability assigned to class l by the classifier ht, αlt is the weight of ht for class l
and S is the normalization factor. The final ensemble is built using the combined additive proba-
bility as given in equation 3.7
HT (x) = argmaxl
(p(l|x)) (3.7)
where HT (x) is the class with highest probability for a given instance x.
Time complexity of building the boosted ensemble
To compute the time complexity of M-Boost, note that the initialization step takes O(n) time for
initializing the weight distribution Dt over the training examples and O(nk) time for initializing
the n distributions P xi over the k classes. Therefore, the time complexity of the first step is O(kn).
The selection of each classifier requires O(d.n2) time, hence the time complexity of selecting T
decision stumps is O(T.(d.n2)). Therefore, the overall time complexity of M-Boost is O(kn +
31

(a) (b) (c)
(d) (e) (f)
Figure 3.1: Weight reassignment strategy(a) Relationship of entropy and probability assigned to the actual class
T.(d.n2)) = O(T.(d.n2)).
To show that the time complexity of step 2 is O(d.n2), note that a decision stump is a single
node decision tree in which the decision criterion depends on a single feature/dimension of the
d-dimensional instance x. An optimal decision stump is found by selecting each dimension iter-
atively and finding an optimal classifier along the selected dimension. The classifier along one
dimension is computed by first sorting the feature values, an nlog(n) process, and then checking,
iteratively, each of the n possible decision stumps for optimality. The optimality criteria of M-
Boost requires computing the error of the classifier and hence its weight for the k classes and then
computing the error of the partially learned classifier Ht. The computation of classifier error and
the error of Ht are both O(n) processes so the time complexity of computing the best classifier
along each dimension is O(nlogn + n.n) = O(n2) (i.e. time of sorting + time of computing the
error of n possible classifiers). As there are d-dimensions the time complexity of finding the best
32

decision stump isO(d.n2). Time complexity of steps 2.2, 2.3 and 2.4 isO(n+k+n) and hence the
time complexity of M-Boost with decision stumps as base classifier isO(nk+T (d.n2 +2n+k)+1
= O(T.d.n2).
In comparison, the standard AdaBoost and Multiclass AdaBoost use O(d.n.logn) time to learn
a single decision stump. The time complexity of completely learning an ensemble of T decision
stumps for these two algorithms is O(T.d.n.logn). AdaBoost-MH breaks a problem into k inde-
pendent binary learning problems and hence it uses O(k.T.d.n.logn) time to learn the ensemble.
This completes the presentation of our first method of creating a multiclass ensemble that
uses a probabilistic classifier to build a classifier. As this method does not require a division of
the multiclass learning problem into binary classification problems hence it belongs to the first
category of boosting algorithm as described at the beginning of this chapter. Next we will present
our second method of creating a multiclass ensemble that generalizes the method of dividing a
multiclass learning problems into binary classification problems.
3.2.2 CBC: Cascade of Boosted Classifier
CBC (i.e. Cascade of Boosted Classifiers) is a method of building a multiclass classifiers using a
dynamically learned cascade structure. Process of learning a cascade is a divide-and-conquer ap-
proach of creating several multiclass learning problems, each having a small number of classes, by
partitioning classes of a large multiclass problem. The method can also be viewed as a generalized
way of decomposing a given multiclass problem into multiple binary classification problems when
the classes at each level are partitioned into exactly two disjoint sets.
33
The Cascade structure
The major observation for constructing the cascade is that it is possible to partition the classes into
two or more sets such that a very accurate M-Boost based classifier can be constructed to discrim-
inate instances belonging to members of one partition from the instances belonging to members of
all other partitions. Based on the above observation, a very simple method has been devised that
divides a K class problem into a l class learning problem using algorithm 3. The algorithm builds
a new l-class learning problem by partitioning the K-classes into l partitions and use M-Boost to
solve the resulting problem with high accuracy. The learned classifier is saved as a node in the
resulting tree structured cascade and the same process is repeated for each partition by dividing
the training data into l partitions as well. This divide and conquer process can be stopped (i) when
K reaches 1 (ii) if the number of training instances reaching a node are less than a predefined
threshold (iii) Most of the examples reaching a node belong to the same class.
The Build Cascade algorithm needs to be be provided with a mechanism of dividing aK-class
learning problem into l-class learning problem automatically. If l is less than K then there are
exponentially many partitions of K-classes into l partitions and selection of an optimal partition
is NP. Therefore to keep the partitioning problem tractable for larger values of K, we always
divided the K-classes into two partitions in our experiments. At each stage the class that was
best discriminated from the remaining classed has been chosen as belonging to one(+1) partition
and all remaining classes have been placed in the second(-1) partition. This resulting cascade is a
binary tree structure with the classifier best discriminating one of the class from remaining used
for making decision at the root. The leafs of the tree are marked with the class label that eventually
lead to that leaf. A general structure of such a cascade is shown in Figure 3.2.2 (a) and the structure
cascade used in our experiments is shown in Figure 3.2.2 (b)
34

(a) (b)
Figure 3.2: Hierarchical Structures
Algorithm 3 :Build Cascade
Require: Examples (x1, y1) . . . (xn, yn) wherexi is a training instance and yi ∈ 1, 2, . . . , K are labels andl is the number of partitions to use
1: if K > 2 and number of training examples is greater than a threshold then2: Create a partition P of the K classes into l sets P1, P2, . . . , Pl
3: Create a l-class learning problem by relabeling yi ∈ Pj as j.
4: Learn a l-class classifier Ml using M-Boost.5: Partition the training data D into l parts D1, D2, . . . , Dl using the predictions of Ml
6: Recursively repeat the above steps for each partition7: else8: Label the leaf node with the discriminating class.9: end if
35

Using the Cascade for Classification
The hierarchical structure of the cascade offers a natural classification algorithm using the tree
traversal strategy. To label an instance x we use the classifier at the root of the cascade to compute
the label of x and repeat the same step by moving along a descendent of the root corresponding to
the label of the predicted class. This process is repeated until we reach a leaf node. The process of
assigning a label to an instance x is shown in Algorithm 4. The algorithm is recursive and uses the
pre-learned cascaded classifier for assigning a label to the input instance x.
Algorithm 4 :Compute Label of xRequire: Instance x to be labeled
Cascaded classifier C1: if C doe not have Descendants then2: set Label of x equal to the class label of the node.3: Return4: end if5: Use the classifier at the root of C to compute the label y of x6: if y = j then7: Recursively compute the label of x by using the jth subtree of C8: end if
3.3 Experimental Settings and Results
Several experiments have been performed to compare the proposed multiclass boosting algorithms
with other multiclass boosting algorithms available in literature. This section presents an empirical
comparison of M-Boost algorithm with AdaBoost-M1 and Multiclass AdaBoost, Gentle, Modest,
and Real AdaBoost. This comparison of M-Boost is succeeded with the results of our CBC based
intrusion detection system for the network intrusion detection dataset adapted from the KDD Cup
99 challenge dataset.
36

3.3.1 M-Boost vs State-of-the-art Boosting Algorithms
Performance of M-Boost on 11 multiclass datasets and 8 binary datasets from the UCI machine
learning repository [56] is reported here. Brief statistics of these datasets are given in Table 4.1.
To estimate the test error, 10-fold cross validation has been used for datasets where separate test
datasets are not specified. In these experiments, decision stumps have been used as the base classi-
fiers. The experiments compare M-Boost with the existing state-of-the-art boosting algorithms in-
cluding AdaBoost-M1, AdaBoost-MH, Multiclass AdaBoost, Gentle, Modest and Real AdaBoost
[35, 84, 103].
M-Boost differs from the remaining boosting algorithms in computing the weight of a classi-
fier and in its weight reassignment strategy. These novel strategies have been incorporated into
AdaBoost-M1 and their effects on its convergence behavior have been studied. In summary, our
experimental results highlight
· The effect of using a weight vector for a classifier
· Performance of M-Boost on multiclass datasets
· Performance of M-Boost on binary datasets
Effect of weight vector for a classifier
The first set of experiments shows the effect of using a weight vector α on 11 different multiclass
datasets with decision stump being the base classifier. The results reported in this section have
been obtained by replacing standard classifier weight assignment procedure of AdaBoost-M1 (step
2.3 Figure 1) with the M-Boost weight vector strategy.
The weight vector strategy has resulted in a significant improvement in the performance of the
AdaBoost-M1 algorithm for 8 datasets. The sample error traces of AdaBoost-M1 and the Modified
AdaBoost-M1 with weight vector strategy for 6 multiclass datasets are shown in Figure 3.3 and
37

Dataset Total Total Instances TotalFeatures Training Test Classes
Iris 4 150-10-Fold cross validation 3Forest Fire 4 500-10-Fold cross validation 4Glass 10 214-10-Fold cross validation 7Wine 13 214-10-Fold cross validation 3Vowel 10 528 462 11Pendigit 16 7494 3498 10Waveform 21 300 4710 3Letters 16 16000 4000 26Yeast 8 980 504 10Segmentation 19 210 2100 7Landstat 36 4435 2000 8
(a) Multiclass Datasets
Dataset Total Total Instances DatasetType
Features Training Test
2D Circular 2 2000 4000 SyntheticTWONORM 20 1000 2000 SyntheticTHREENORM 20 1000 2000 SyntheticRINGNORM 20 4960 3762 SyntheticIONOSPHERE 34 351 176 RealBREASTCANCER
30 382 296 Real
SPAMBASE 57 3083 2343 Real(b) Binary Datasets
Table 3.1: Datasets used in our experiments
38

results for all multiclass datasets are listed in Table 3.2. In general, the accuracy has improved
significantly for datasets with large number of classes. In most cases the standard AdaBoost-M1
algorithm failed drastically, as also reported by Zhu et al. [103].
39

Figure 3.3: Effect of weight vector α on the test error of AdaBoost-M1
40

Test Error Rounded to Nearest Integer
Dataset AdaBoost-M1 AdaBoost-M1 Weight vec-
tor
Percent Improve-
ment
Abalone 99 80 19
Forest Fire 25 18 7
Glass 31 2 29
Landstat 99 30 69
Letters 96 82 14
Pendigit 99 31 68
Segmentation 99 35 64
Vowel 99 67 23
Waveform 19 21 -2
Wine 2 10 -8
Yeast 60 70 -10
Table 3.2: AdaBoost-M1 Vs AdaBoost-M1 with weight vector α
Performance of M-Boost on multiclass datasets
A second set of experiments has been performed to measure the accuracy of M-Boost on the
multiclass datasets. The training and test error traces of M-Boost, AdaBoost-MH and multi-class
AdaBoost on 7 multiclass datasets are shown in Figure 3.4. The test error rate of M-Boost on all of
these datasets is better than the Multi-class AdaBoost and on 4 datasets it is better than AdaBoost-
MH. The training and test error rates of these algorithms on all multiclass datasets are given in
Table 3.3 with the highlighted value indicating the minimum.
M-Boost performs better than AdaBoost-MH and Multiclass AdaBoost for the Forest fire,
Vowel recognition, Waveform and Letter recognition datasets whereas for the remaining datasets
41

the test error for M-Boost is, in general, better than that of Multi-class AdaBoost and comparable
to AdaBoost-MH.
Another view of these results is given in Figure 3.5. This histogram shows the number of
datasets for each algorithm which fall in a discrete test error interval. It is evident from this view
that error rates attained by M-Boost are comparable to AdaBoost-MH and are significantly better
than Multi-class AdaBoost.
Performance of M-Boost on binary datasets
M-Boost has been compared with the binary boosting algorithms, Gentle AdaBoost, Modest Ad-
aBoost and Real AdaBoost [35] on 7 binary classification problems. Gentle and Modest AdaBoost
are variants of standard AdaBoost algorithm that use different weight update strategies of training
examples whereas Real Adaboost is the binary version of AdaBoost-MH.
Figure 3.6 shows the test error rate comparison of M-Boost, Gentle, Modest and Real AdaBoost
on 4 simulated binary classification datasets and figure 3.7 shows their test error rate comparison
on 3 real datasets from the UCI machine learning repository.
M-Boost is better than Modest AdaBoost and comparable to Gentle and Real AdaBoost for
circular dataset. The performance of M-Boost on the Two Norm and Three Norm datasets [15]
is equivalent to the other three boosting algorithms. For the Ring Norm dataset M-Boost is better
only than Modest AdaBoost.
3.3.2 Cascade of Boosted Classifiers for Intrusion Detection
This section presents the experimental results obtained by using the proposed cascade classifier for
detecting intrusion in network traffic. Intrusion attacks on in a networked environment can take
various forms including port scans, probes, viruses/worms, trojans, bots, rootkits, spoofing, denial
of services, and exploits [88]. The proposed system uses the divide and conquer strategy of CBC
to divide the problem involving a larger number of classes into a smaller problem and use M-Boost
42
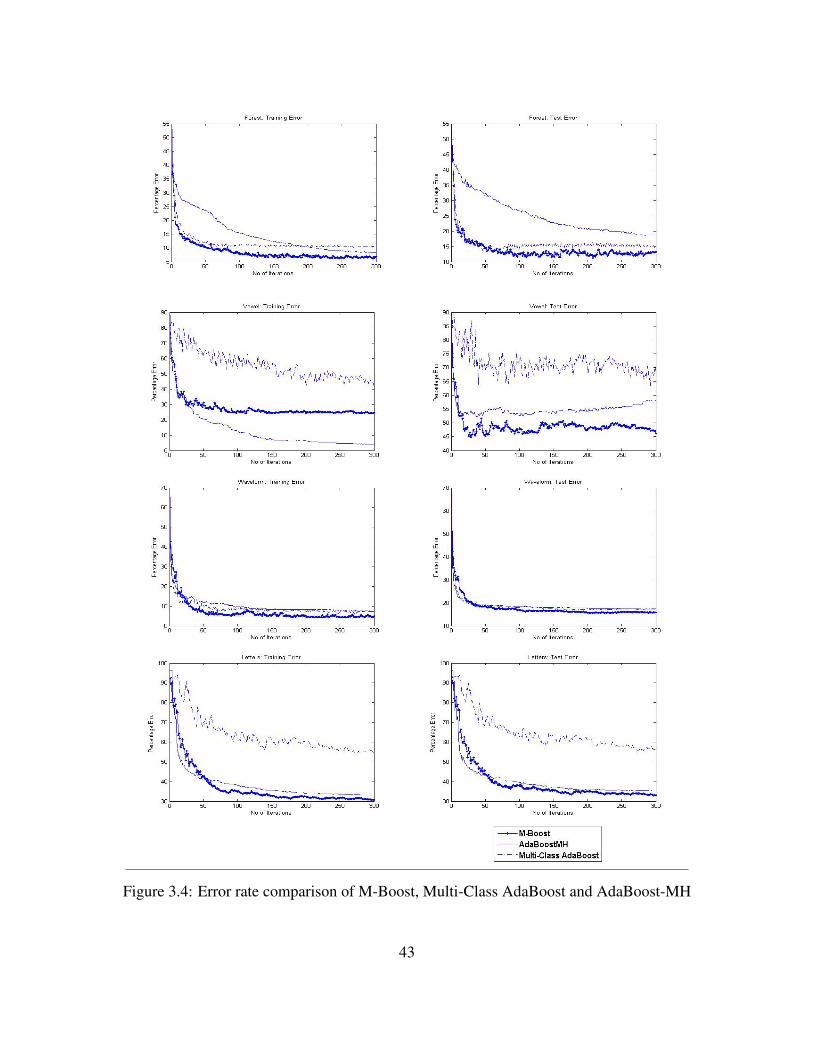
Figure 3.4: Error rate comparison of M-Boost, Multi-Class AdaBoost and AdaBoost-MH
43

Dataset Training Error Test ErrorM-Boost AdaBoost-MH Multiclass M-Boost AdaBoost-MH Multiclass
Iris 0.833 0.167 0.000 6.452 3.871 5.161
Pendigit 13.824 4.257 26.515 19.434 10.832 29.323
Forest 6.900 5.200 10.750 13.267 14.851 15.050
Glass 0.000 0.000 31.775 2.738 2.273 31.501
Vowel 24.621 1.136 37.500 46.004 54.644 67.819
Landstat 17.475 16.347 58.219 20.290 19.54 58.471
Wine 0.843 0.000 0.000 8.213 3.273 4.384
Waveform 5.000 5.000 6.330 15.848 17.103 17.018
Yeast 46.327 32.653 54.286 55.050 42.574 59.010
Letters 30.800 32.981 55.356 33.267 35.066 56.611
Segmentation 0.000 0.000 8.095 10.186 5.854 12.661
Table 3.3: Percent error rate comparison of M-Boost, AdaBoost-MH and Multi-Class AdaBoost
Figure 3.5: Number of datasets per test error interval
44
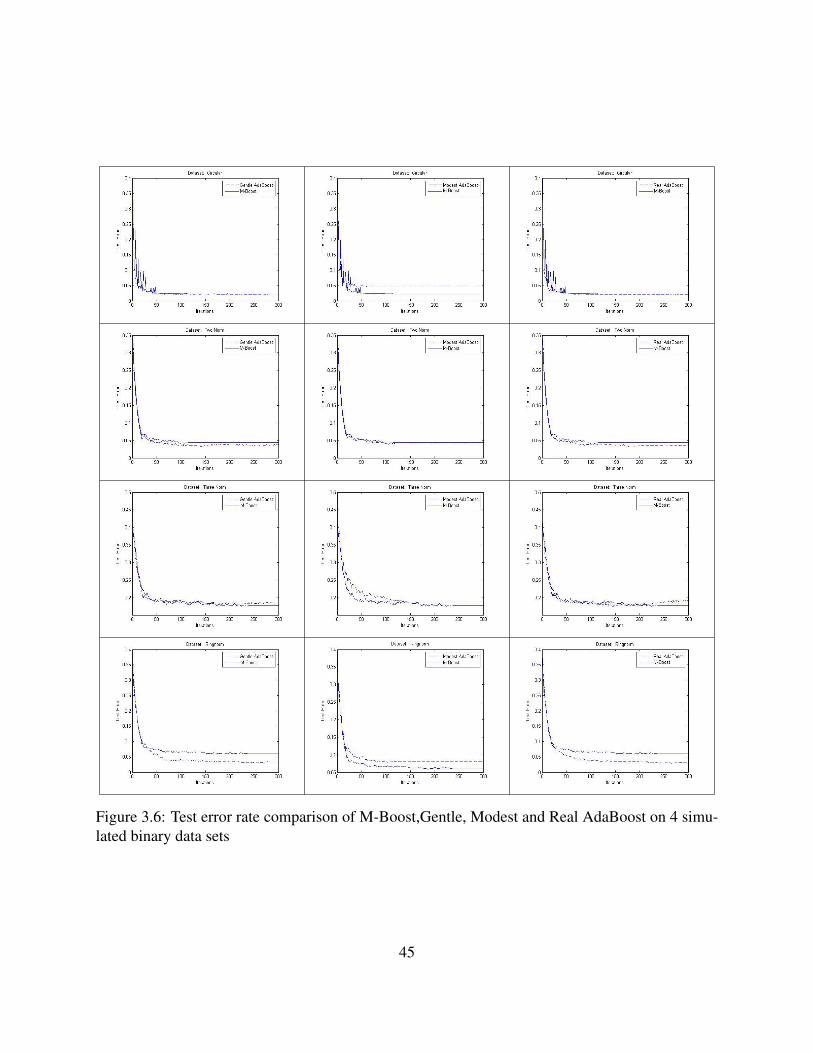
Figure 3.6: Test error rate comparison of M-Boost,Gentle, Modest and Real AdaBoost on 4 simu-lated binary data sets
45

Figure 3.7: Test error rate comparison of M-Boost, Gentle, Modest and Real AdaBoost on 3 binarydata sets from UCI repository
46

to learn a classifier for the smaller problem. At each step of our experiments the classes were
partitioned into two sets. The first set always had a single class whereas the second set consisted of
all the remaining undecided classes. For example we used the Normal class at the root followed
class labeled 19 and so on. Therefore the resulting cascade, in our experiments, has been similar
to the cascade structure shown in Figure 3.2.2
Next we present a detailed description/statistics of the dataset used in our experiments followed
by the experimental settings and results obtained from these experiments. A detailed comparison
of the proposed cascade structure with the performance of AdaBoost-M1 and that of Multiclass
AdaBoost is also provided.
Dataset Description
The dataset used in our experimental work is adopted from the KDD Cup 99 (KDD’99) dataset
prepared and managed by MIT Lincoln Labs as part of the 1998 DARPA Intrusion Detection
Evaluation Program. KDD’99 was first used for the 3rd International Knowledge Discovery and
Data Mining Tools Competition in 1999. Since then, KDD’99 has became a dominant intrusion
detection dataset which has been widely used by most researchers to evaluate and benchmark their
work related to various types of intrusion detection [3, 4, 11, 30, 55].
The dataset consists of processed TCP dump portions of normal and attack connections to a
local area network simulating a military network environment. There are 23 different types of
attack instances in the dataset falling into four main categories, namely: denial of service (DoS)
such as syn flood, unauthorized access from a remote machine (R2L) such as password guess,
unauthorized access to local root privileges (U2R) such as rootkit, and probing such as port scan
and nmap. The adopted dataset has 494021 connections; each described using 41 attributes and
a label identifying the type of connection (either normal or one of the attacks). Two attributes
are symbolic whereas the remaining 39 attributes are numeric. The attributes are divided into
four groups: basic attributes of individual connections (9 attributes), content attributes within a
47

connection suggested by domain knowledge (13 attributes), time-based traffic attributes computed
using a two-second time window (9 attributes), and host-based traffic attributes computed using
a window of 100 connections to the same host (10 attributes). A summary of the attributes is
provided in Tables 3.4 3.5. Detailed statistics and a percentage split of examples belonging to
various classes are shown in Figure 3.8. It is clear from these statistics that the dataset has three
dominant classes covering more than 98% of the total examples. This dominance of few classes
poses a very interesting learning problem as many of the learning algorithms, in an effort to attain
high accuracy, tend to ignore most of the smaller classes and hence attain very poor accuracy on
the classes.
(a) (b)
Figure 3.8: Dataset Statistics
In our first set of experiments 10-fold cross validation has been used to estimate the test error
rate the cascade and that of AdaBoost-M1 and Multiclass AdaBoost. The dataset has been ran-
domized and split into 10 non-overlapping partitions and the training and testing are repeated 10
times using a different partition for testing and the remaining partitions for training. In these exper-
iments, decision stumps have been used as the base classifiers in all the boosting based algorithms.
The reason for using decision stumps is that a domain partitioning algorithm like decision stump
can be easily modified to output class probabilities instead of a class predictions. To estimate the
48

Table 3.4: Dataset Summary: Category, Notation, Name, Type, Statistics and Description
StatisticsNot. Name Type Min Max Description
Basic Category Attributesa1 duration num. 0 58329 Connection length in secondsa2 pro_type cat. – – Prototype type which can be tcp, udp, or icmp.a3 srv cat. – – Service on the destination; there are 67 potential
values such as http, ftp, telnet, domain, etc.a4 flag cat. – – Normal or error status of the connection; there
are 11 potential values, e.g. rej, sh, etc.a5 src_bytes num. 0 693M Num. of bytes from the source to the destina-
tiona6 dst_bytes num. 0 52M Num. of bytes from the destination to the
sourcea7 land binary – – Whether conn. from/to same host/port or nota8 wrng_frg num. 0 3 Number of wrong fragmentsa9 urg num. 0 3 Number of urgent packets
Content Category Attributesa10 hot num. 0 30 Number of hot indicatorsa11 n_failed_lgns num. 0 5 Number of failed login attemptsa12 logged_in binary – – Whether successfully logged in or nota13 n_cmprmsd num. 0 884 Number of compromised conditionsa14 rt_shell binary – – Whether root shell is obtained or nota15 su_attmptd num. 0 2 Number of “su root” commands attempteda16 n_rt num. 0 993 Number of accesses to the roota17 n_file_crte num. 0 28 Number of create-file operationsa18 n_shells num. 0 2 Number of shell promptsa19 n_access_filesnum. 0 8 Number of operations on access control filesa20 n_obnd_cmds num. 0 0 Number of outbound commands in an ftp ses-
siona21 is_hot_lgn binary – – Whether login belongs to hot list or nota22 is_guest_lgn binary – – Whether guest login or not
49

Table 3.5: Dataset Summary: Category, Notation, Name, Type, Statistics and Description
StatisticsNot. Name Type Min Max Description
t_traffic (using a window of 2 seconds)a23 cnt num. 0 511 Number of same-host connections as the cur-
rent connection in the past 2 secondsa24 srv_cnt num. 0 511 Num. of same-host conn. to the same service as
the current connection in the past 2 secondsa25 syn_err num. 0 1 Percentage of same-host conn. with syn errorsa26 srv_syn_err num. 0 1 Percentage of same-service conn. with syn er-
rorsa27 rej_err num. 0 1 Percentage of same-host conn. with rej errorsa28 srv_rej_err num. 0 1 Percentage of same-service conn. with rej er-
rorsa29 sm_srv_r num. 0 1 Percentage of same-host conn. to same servicea30 dff_srv_r num. 0 1 Percentage of same-host conn. to different ser-
vicesa31 srv_dff_hst_r num. 0 1 Percentage of same-service conn. to different
hostsh_traffic (using a window of 100 connections)
a32 h_cnt num. 0 255 Number of same-host connections as the cur-rent connection in the past 100 connections
a33 h_srv_cnt num. 0 255 Num. of same-host conn. to the same service asthe current connection in the past 100 connec-tions
a34 h_sm_srv_r num. 0 1 Percentage of same-host conn.to same servicea35 h_dff_srv_r num. 0 1 Percentage of same-host conn. to different ser-
vicesa36 h_sm_sr_prt_rnum. 0 1 Percentage of same-service conn. to different
hostsa37 h_srv_dff_hst_rnum. 0 1 Percentage of same-service conn. to different
hostsa38 h_syn_err
num.0 1 Percentage of same-host conn. with syn errors
a39 h_srv_syn_errnum. 0 1 Percentage of same-service conn. with syn er-rors
a40 h_rej_err num. 0 1 Percentage of same-host conn. with rej errorsa41 h_srv_rej_err num. 0 1 Percentage of same-service conn. with rej er-
rors
50

conditional probability p(cj|x) for a given partition, the weight Wj of class j instances and the
total weight W of all instances in the partition are used to compute the class probability using:
p(cj|x) =Wj + β
W + k.β(3.8)
The constant β in the above equation acts as a small smoothing value that is used to avoid zero
probabilities.
The first set of results, shown in Table 3.6, give a weighted average of four commonly used
performance measures including Accuracy, Precision, Recall and F-Measure. It is clear that all
learning algorithms in general and the M-Boost based cascade in particular attained very high
average values for all the four performance measures.
In our second set of experiment, similar results have been obtained using a straight split of the
dataset into a training set and a test set. In these experiments we used 3.4% data for training the
classifiers and the remaining 96.6% data has been used as test set. The second set of results, shown
in Table 3.7, give a weighted average of Accuracy, Precision, Recall and F-Measure. These results
are quite similar to the first set of results with the M-Boost based cascade and Multiclass AdaBoost
giving better average results than those of AdaBoost-M1.
3.4 Summary
This chapter presented our two new methods of creating classifier ensembles to handle multiclass
learning problems. First of these methods, M-Boost, is a boosting like algorithm that creates a
multiclass ensemble without dividing the problem into several binary classification problems. The
second method, CBC, divides a given multiclass learning problem into several multiclass learning
problems by partitioning the classes and use a divide-and-conquer strategy to learn a multiclass
classifier.
51

Table 3.6: Comparison of various methods in terms of accuracy, precision, recall and F1 measurefor training and testing
Phase Method Accuracy Precision Recall F1 MeasureTraining
AdaBoost-M1 0.991±0.0004 0.964±0.0003 0.973± 0.005 0.96± 0.007Multiclass Ad-aBoost
0.999±0.0001 0.998±0.0003 0.998± 0.003 0.997± 0.008
Cascaded M-Boost
1± 0.0001 0.999±0.0001 0.999±0.0013 0.999± 0.002
TestingAdaBoost-M1 0.989± 0.001 0.957± 0.004 0.964± 0.004 0.961± 0.006Multiclass Ad-aBoost
0.998± 0.006 0.997± 0.004 0.997± 0.005 0.996± 0.007
Cascaded M-Boost
0.999±0.0001 0.998±0.0003 0.999± 0.003 0.998± 0.003
Table 3.7: Comparison of various methods in terms of accuracy, precision, recall and F1 measurefor training and testing
Phase Method Accuracy Precision Recall F1 MeasureTraining
AdaBoost-M1 0.994 0.961 0.978 0.969Multiclass Ad-aBoost
1 0.999 0.999 0.999
Cascaded M-Boost
1 0.999 0.999 0.999
TestingAdaBoost-M1 0.994 0.962 0.978 0.970Multiclass Ad-aBoost
0.999 0.999 0.999 0.999
Cascaded M-Boost
0.999 0.999 0.999 0.999
52

M-Boost introduces a new classifier selection and classifier combining rules and uses deci-
sion stumps as base classifier to handle a multi-class problem without breaking it into multiple
binary classification problems. M-Boost uses a global optimality measures for selecting a weak
learner as compared to standard AdaBoost variants that use a localized greedy approach. It uses a
reweighing strategy for assigning weights to training examples as opposed to standard exponential
multiplicative factor used to modify training example weights. M-Boost uses a probabilistic base
learner outputs a probability distribution over all classes rather than a binary classification deci-
sion. The chapter also presented an experimental setup to compare M-Boost with AdaBoost-M1
and Multi-class AdaBoost.
The chapter also presented a novel encoding based approach of creating a multi-class cascade
of classifiers called CBC. The method used in CBC does not require explicit encoding of the given
multiclass problem, rather it learns a multi-split decision tree and implicitly learns the encoding
as well. In this recursive approach, an optimal partition of all classes is selected from the set of
all possible partitions of classes, the training data is relabeled, and the reduced multiclass learning
problem is learned through applying any multiclass algorithm. The proposed method has been
used to build a multi-class cascade to classify instances belonging to one of the 43 classes in a
benchmark network intrusion dataset adopted from the KDD Cup 99 dataset.
53

Chapter 4
Incorporating Prior into Boosting
Machine learning literature discuss, in detail, several effective methods of creating a classifier
from a given set of labeled training examples {(xi, yi)|i = 1, 2, . . . , N}. However, most of the
real world learning problems have significant prior knowledge that might be used along with the
training data to optimize the learned classifier. Such prior might be available in the form of very
simple rules, like an audio frame with very low average energy is highly unlikely to have any
voice activity of interest or the part of the image without any edges is highly unlikely to contain
a human face, or it can be available in the form of a probability distribution function that can
be used to predict probabilities of various events. In general, the features designed to train an
optimal classifier are discriminative and their values are a good indicator of the actual class of an
instance. Such knowledge or information about the structure of an instance space can either be
provided by a human expert or can be efficiently generated from the labeled training data itself.
Problem however remains as to how this domain knowledge be effectively incorporated into a given
learning algorithm. This chapter presents a method of incorporating prior effectively into boosting
based ensemble learning algorithms. The method, called AdaBoost-P1, uses a hypotheses space
of probabilistic classifiers and introduces a novel method of classifier selection so that the prior is
incorporated into ensemble learning.
54

In the rest of the chapter, a short review of various methods of incorporating prior into classifier
learning algorithms and the discussion of an existing method of incorporating prior into AdaBoost
is presented in Section 4.1. Section 4.2 describe, in detail, the proposed method of incorporat-
ing prior into boosting based ensembles and the experimental settings and corresponding results
obtained are presented in Section 4.3.
4.1 Introduction
In the supervised learning setting a learning method is presented with a set of labeled training
examples and is assumed to generate a model that can be used to label future instances. Most
of the supervised learning literature, therefore, presents methods to learn a classifier from the
training data alone [33, 28, 71, 16, 61, 58, 90]. However, several real world learning problems have
significant domain/prior knowledge available about the problem structure along with the training
data. For example the presence or absence of a key word might be a good indicator of a documents
actual class. Further, the feature space representation of a problem is generally very expressive as
the computed features typically discriminate a class from other classes. Such domain knowledge
or information about the structure of instance space can either be provided by a human expert or
generated automatically from the training data itself.
Machine learning literature presents several useful methods of incorporating prior knowledge
into various classifier learning algorithms including SVM, Naïve Bayes, decision tree learning
etc [64, 86, 99, 54, 102, 57]. Niyogi et. al. [64] suggested a general framework of using prior
knowledge to generate additional virtual training examples and hence prior is used to address the
problem of training data sparsity. Schölkopf and Simard [86] uses an appropriate kernel function to
incorporate prior into SVM classifiers. Another method of incorporating prior into SVM has been
proposed by Wu and Srihari [99] that uses the idea of assigning weights to training examples using
prior knowledge and then computes an optimal separating hyperplane using the weighted margins.
55

Krupka and Tishby [54] uses a feature based prior to define a vector of meta-features and uses
these meta-features to incorporate prior into learning a SVM . Zhu and Chen [102] used domain
specific information for document classification whereas Liu et. al [57] used the prior along with
Naïve Bayes classifier to create a text classifier.
The use of prior knowledge along with different types of classifier learning algorithms has
been an active research area in machine learning. However, the existing literature does not present
effective ways of incorporating prior knowledge into ensemble learning methods except for the
study presented by Schapire et. al. [82]. The main focus of this study is incorporation of prior into
boosting based ensemble learning algorithms and therefore the remaining discussion will primarily
address the problem of incorporating prior into AdaBoost variants.
The method presented in [82] has been introduced for learning problems suffering from the
scarcity of training data and hence incorporates prior into AdaBoost by introducing additional
virtual training examples by using prior. Empirical evidence suggest that the method described in
[82] does not present any significant advantage as the number of training examples increase. That
means, their method does not use the domain knowledge for a faster convergence or for obtaining
better accuracy when sufficient amount of training data is already available. Ideally one would
expect the domain knowledge to compensate the lack of training data for problems suffering from
scarcity of data, and on the other hand help in reducing the convergence time and/or improve
overall accuracy if the training data is in abundance. Moreover, the method presented in [82]
does not generalize to all boosting algorithms and uses only one specific variant of AdaBoost to
incorporate prior into boosting. In summary the existing method of incorporating prior knowledge
into boosting has the following shortcomings
• The method becomes ineffective in terms of prediction accuracy and inefficient when large
training set is already available.
• The method is limited to only one boosting algorithm and can not be generalized to a wide
56

verity of boosting algorithms.
To address these issues, a novel method of incorporating prior into boosting is presented in this
chapter that improves the overall classification accuracy, compensates for lack of training data,
and improves the convergence rate of boosting algorithms. Moreover, the proposed method is not
specific to a single boosting algorithm and can be used to incorporate prior into a large class of
boosting algorithms. The proposed method, therefore, covers the aforementioned limitations of
the state-of-the-art method of incorporating prior into boosting.
The proposed method uses prior to modify the weight distribution maintained over training
examples and hence effects the selection of base classifier in each boosting iteration. Further it
also uses the prior as a component classifier and as a multiplicative factor in the overall ensemble
and hence incorporates the available prior into ensemble learning. The method works for domain
knowledge of varying quality i.e., for situations when the domain knowledge is relatively precise to
situations when it is vague. While the method of Schapire et. al [82] is based on only one specific
variant of AdaBoost algorithm, our method can be used to incorporate prior into any boosting
algorithm that can handle a probabilistic base classifier ht. Such classifiers output a conditional
density over classes for an input instance x. Learning algorithms like decision trees, stumps and
classifiers that output confidence rated predictions can be readily modified to output the required
class conditional density instead of the classification decision [84] and hence can be used with the
proposed method. The proposed method has been applied to several synthetic and real datasets
of varying complexity with stumps as base classifier. In several cases, significant improvement in
classification accuracy has been observed. The use of prior also resulted in faster convergence of
boosting algorithms and hence improved efficiency of the learned ensemble. The proposed method
has been further extended to handle two different cases of a real valued base learners i) when the
base learners output a bounded signed output and ii) for the case when a bounded unsigned outputs
are produced by the base learner.
57

4.2 Incorporating Prior into Boosting
To describe the proposed method of incorporating prior knowledge into any boosting algorithm
that generates a probabilistic classifier, we initially consider a binary classification problem. A
straight forward extension to handle multiclass learning problems is described later. The descrip-
tion assumes that that the boosting algorithm is provided with a set of n labeled training examples
{(xi, yi)|i = 1 . . . n} where yi ∈ {+1,−1}. Further, the probabilistic classifierH generated by the
boosting algorithm outputs estimates of class conditional density f(y+|x) denoting the probability
of y being +1 given x. Like the method of Schapire [82], It is also assumed that the prior has been
provided in the form of a conditional density π(y+|x) denoting the probability of y being +1 given
x.
As described by Coryn A.L [20], there are two equivalent ways to combine the estimates of
class probabilities obtained from two independent different sources to get a single estimate of
class probabilities. The first method of combining the probabilities uses an averaging procedure
to get an overall estimate of class probabilities whereas the second method uses a multiplicative
method to combine class probabilities obtained from two different sources. These two methods
are equivalent in the sense that both these approaches result into equivalent classifiers. To combine
the class probability estimates obtained from the prior, F (x) = π(y+/x), and from the output
of ensemble, H(x), we take the second approach. Therefore, a combined estimate of probability
P (y+|x) can be computed using the product of these two probability estimates as
P (y+/x) = βπ(y+/x).f(y+/x) (4.1)
where β is a normalization constant.
AdaBoost like most boosting based algorithms compute a linear combination of selected clas-
58

sifiers to build the final ensemble so the final form of ensemble produced by boosting is
f(y+/x) =T∑t=1
αt.ht(x) (4.2)
Substituting 4.2 into 4.1 we obtain
P (y+/x) = δ.π(y+/x).T∑t=1
αt.ht(x) (4.3)
where δ is a normalization constant.
Equation 4.3 is our main equation for incorporating prior knowledge into boosting algorithm when
the boosted classifier output density estimates over the possible classes. The resulting boosting
algorithm works exactly like AdaBoost except that the final classifier is formed as
H(x) = sign
(log
(P (y+/x)
1− P (y+/x)
))(4.4)
This equation can be used with any base classifier that output class density estimate. In case of
base classifiers that produce binary or confidence rated output the value of each ht(x) must be
converted into probability estimates, for example by using logistic regression function, and then
the product similar to equation 4.3 can be computed. When each base classifier ht output class
conditional density, equation 4.3 can be written as
P (y+/x) =T∑t=1
αt.π(y+/x).ht(x) (4.5)
Equation 4.5 is used to derive our method of incorporating prior into any boosting algorithm that
uses probabilistic base learner. From this equation it is obvious that
To incorporate prior into boosting we consider prior combined base classifiers of the form
pt(x) = π(y+/x).ht(x) instead of ht(x). Therefore, in each boosting iteration a classifier instance
59

pt(x) = π(y+/x).ht(x) that gives optimal performancew.r.t the weight distributionDt is selected.
It is important to note that a direct selection of such a pt(x) requires modification in the base learn-
ing algorithm so that both the prior, π(y+/x), and the weight distribution,Dt, are used for selecting
a classifier ht. Such a modification is feasible only when a very simple learning algorithms like
decision stump is used as base learner but for most of learning algorithms, e.g. Decision Trees,
Support Vector Machines, Neural Networks, e.t.c., such a change is not obvious or not feasible due
to exponentially many classifiers to search from.
We, therefore, take a two step approach to use prior for selecting an optimal classifier pt(x)
w.r.t Dt. In the first step, prior is used to modify the weight distribution maintained on training
examples followed by the second step of selecting the classifier instance ht using the modified
weight distribution. Weight distribution is modified so that weights of examples misclassified
by the prior are increased by an exponential multiplicative factor. This multiplicative factor is
computed exactly like the multiplicative factor computed in each boosting iteration. Calculation of
the weight modifying factor is based on the error rate, εp, of the priorw.r.t. the running distribution
Dt. The modified distribution is normalized and used to select the classifier instance ht using the
base learning algorithm without any modification. Therefore, the prior affects the selection of
base classifier via the weight modification step. In each boosting iteration, this two step process
mimics fitting a combination of two classifiers, first the fixed prior π(y+|x) followed by the fitting
a classifier instance ht using the learning algorithm. Following the method of Schapire [82] the
prior is added as a component classifier, h0 in the final ensemble. The weight α0 of h0 is set equal
to 1− ε0 where ε0 is the error rate of h0 on the training data.
The boosting algorithm, AdaBoost-P1 that results from incorporating prior into learning is
given as Algorithm 5. The algorithm takes as inputs n labeled training examples (x1, y1) . . . (xn, yn),
a parameter T specifying the total base classifier instances to be used for ensemble construction and
the prior π(y+/x) giving the probability of an instance x being in class +1. The algorithm main-
tains a running distribution Dt on training examples which is initially uniform. In each boosting
60

Algorithm 5 : AdaBoost-P1
Require: Examples (x1, y1) . . . (xn, yn) wherexi is a training instance and yi ∈ {−1,+1} andparameter T = total base learners in the ensembleπ(y+/x) : Domain knowledge in the form of Prior
1: set D1(i) = 1n
for i = 1 . . . n
2: for t =1 to T do3: Compute labels ypi = sign
(log( π(y+|xi)
1−π(y+|xi)))
4: set εp = Pr[ypi 6= yi] w.r.t Dt
5: set αp = 12log(1−εp
εp)
6: Set Dtemp(i) = Dt(i). exp(−αp.yi.ypi )7: Normalize the weight distribution Dtemp(i)
8: Select a weak classifier instance ht which has small error w.r.t Dtmp
9: Compute labels Opi = sign
(log( π(y+|xi).ht(xi)
1−π(y+|xi).ht(xi)))
10: set εt = Pr[Opi 6= yi] w.r.t Dt
11: set αt = 12log(1−εt
εt)
12: Set Dt+1(i) = Dt(i) exp(−αt.yi.Opi )
13: Set Dt+1(i) = Dt+1(i)Zt
where Zt is the normalization factor14: end for15: output classifier
H(x) =∑T
t=0 αt.ht(x)∑Tt=0 αt
.π(y+/x)
class with maximum probability estimate is the predicted class.
61

iteration, the prior is used to predict the labels of training examples and an intermediate distribu-
tion Dtmp is computed using the error rate of the prior π(y+/x) w.r.t. the Dt. This intermediate
distribution is then used to select a classifier instance ht. An example misclassified by prior get
larger weight than its’ weight in Dt and hence the prior affects the selection of the base classifier
ht. Finally, a weight distribution is updated toDt+1 using the error rate of prior combined classifier
pt(x) = π(y+/x).ht(x) instead of the error of ht alone.
Multiclass Extension
AdaBoost-P1 can be naturally extended to handle multiclass learning without a major modification.
To incorporate prior into multiclass the prior must be provided in the form of a conditional density
π(y/x) denoting the probability of label being y given x. The label y in this case comes from a
larger set {y1, y2, . . . , yk} for a k-class learning problem. Like the binary classification problem it
is assumed that the base learning algorithm output a classifier ht that gives the estimate of class
conditional density f(y|x). With these changes equation 4.5 becomes
P (y/x) =T∑t=1
αt.π(y/x).ht(x) (4.6)
So our method of incorporating prior remains the same with the product, π(y/x).ht(x), being a
normalized point by point product of two densities.
4.2.1 Generating the Prior Knowledge
Schapire [82] suggested a process to construct prior knowledge for the text categorization datasets.
His method requires the domain experts to associate various keywords to titles or categories. The
probability of a particular topic/dialogue is then computed by assuming independence of occur-
rence of the keywords and taking product of probabilities obtained from the presence or absence of
various keywords in a given article. In general their technique works well for problems involving
62

categorical features. To adapt this technique for features having continuous values we require that
the experts provide us a sequence of threshold values and corresponding values of class probabili-
ties for each partition of feature values defined by the threshold values. The class probabilities so
obtained must be multiplied and normalized to obtain the final estimate of class probabilities.
A difficulty associated with the above techniques of generating prior from expert opinion is
that it requires a human experts to assign the probabilities. To overcome this difficulty we suggest
an automatic way to construct prior knowledge using the structure of the instance space. In our
approach we compute a model, Gaussian in our case, for each class and use that model to assign
the prior probabilities. The parameters of the model are computed using maximum likelihood
estimates as is done in the naive Baye’s approach. Therefore, our method involves the training data
to estimate the prior and hence captures the structure of instance space. It is important to note that
such a prior can not be called a prior in the true statistical sense even though such probabilities are,
often, very accurate. Since our method of incorporating prior only assume that the prior has been
provided in the form of a class conditional density so output of any previously learned confidence
rated or probabilistic classifier can also be used as prior in our method without much modification.
4.3 Experimental Settings and Results
Several experiments have been performed to study the effects of using the proposed method of
incorporating prior into boosting. The results reported in this paper compare the performance of
two boosting algorithms AdaBoost-M1 [33] and Multiclass AdaBoost [103] with and without
incorporating prior.
Decision tree learning has been used as base algorithm with the results reported for decision
stumps (i.e. single node decision trees) and dlog(K)e split decision trees for a K class learning
problem. A decision stump partitions the instance space into two parts where as a dlog(K)e split
decision tree partitions the instance space into a maximum of 2dlog(K)e = K parts. The class prob-
63

ability estimates, to be used in the proposed method, have been obtained by using the frequency
counts of each class instances falling in a given partition determined by the decision tree. To avoid
a probability estimate of 0, all zero class counts were replaced with a small number ε representing
a small class probability. A set of 200 base classifiers has been used to build the final ensemble
with this number selected empirically as it gives a fair idea of both the training and test error rates.
Experimental results on twelve multiclass learning problems and four binary classification
datasets mostly from the UCI machine learning repository [56] are presented in this paper. These
learning problems include three simulated binary classification problems the two-norm, three-norm
and ring-norm taken from the work of Leo Breiman [16]. The main characteristics of all the
datasets including the dimension of instance space, training set and test set sizes and the number of
classes are summarized in Table 4.1. Both synthetic and real world multiclass learning problems
of varying complexity are included in these datasets.
To get an estimate of test error rate, 10-Fold cross validation has been used for datasets without
explicit division into training and test sets and a paired t-test, as reported by Dietterich [24], has
been used to compare the boosting algorithms with and without incorporating prior in this case. In
case of 10-fold cross validation a value greater than 1.82 indicates a significant difference between
the performance of two algorithms.
For the datasets with explicit training and test set division, the complete training set has been
used to learn the ensemble and the given test set used to estimate the test error. The test for
difference of proportions has been used as described by [89] has been used in this case to compare
the boosting algorithms with and without incorporating prior. A z-score of more than 1.96 indicates
a significant difference between the performance of two algorithm with 95% confidence.
The first set of experiments compare the performance of the two boosting algorithms with and
without incorporating the prior. In the first experiment, a single node decision tree has been used as
the base classifier where as in the second experiment a stronger decision tree classifier with log(K)
splits has been used as the base classifier. The prior in these experiments have been obtained using
64

our method of generating prior as described in section 4.2.1.
A second set of experiment studies the effect of prior quality when the prior is changed from
perfect prior to uniform prior and then to poor prior. A prior is considered perfect if it mostly
assigns a high probability (i.e. ≈ 1) to the actual class and a prior is poor if it assigns a low
probability (i.e. < 1K
) to the actual class for most instances.
Finally the last experiment demonstrate the use of prior to compensate the sparsity of training
data. The prior, in this experiment, is fixed and the amount of training data is varied from 1% to
100%.
4.3.1 Results and Discussion
The First set of results presents a comparison of Multiclass AdaBoost [103] and AdaBoost-P1.
These experiments have been carried out both with multi-split decision tree {Log(K) splits} and
with decision stumps as base learning algorithm.
Table 4.2 compares the test error rate of Multiclass AdaBoost algorithm with and without incor-
porating prior knowledge for datasets having distinct training and test sets. The prior knowledge
in all these experiments have been obtained from the training data itself and was slightly, (0.15%),
biased towards the actual class. The first three dataset are simulated binary classification problems
whereas the remaining datasets are multiclass problems involving 3 to 25 classes. The table lists
the test error rates of the two algorithms along with the z-score indicating the significance of dif-
ference between two algorithms. As mentioned previously, a value of z-score greater than 1.96
indicates a significant difference between the two algorithms with a high confidence value.
For both cases, multi-split decision trees or decision stump as base classifiers, the effect of in-
corporating prior has been significantly positive and the algorithm with incorporating prior knowl-
edge converged to a better ensemble than the algorithms without it. In case of the simulated ring-
norm dataset the proposed method of incorporating prior had a negative impact on the algorithm
performance.
65

Table 4.1: Datasets Used in Our Experiments.
DATA SET TOTAL TRAINING TEST TOTAL
NAME FEATURE SET SET CLASSES
TWO NORM 20 2000 1000 2THREE NORM 20 2000 2000 2RING NORM 20 2000 2000 2WISCONSIN BREAST CANCER 4 569 — 2SPAMBASE 57 4601 — 2IRIS 4 150 — 3FOREST FIRE 4 500 — 4GLASS 10 214 — 7WINE 13 214 — 3PEN DIGIT 16 7494 3498 10VOWEL 10 528 462 11LAND STATE 36 4435 2000 8WAVEFORM 21 300 4710 3YEAST 8 980 504 10ABALONE 8 3133 1044 29LETTERS 16 16000 4000 26SEGMENTATION 19 210 2100 8
Table 4.2: Test Error rate Comparison of Multiclass AdaBoost and AdaBoost-P1
MULTI-SPLIT DECISION TREES DECISION STUMPS
DATA SETNAME
TWO NORMTHREE NORMRING NORMPEN DIGITVOWELLAND STATEWAVEFORMYEASTABALONELETTERSSEGMENTATION
MULTICLASS ADABOOST Z-SCOREADABOOST P1
3.45 1.45 4.0918.24 12.24 5.27
2.99 49.69 37.054.23 1.83 5.85
59.83 26.78 10.1338.08 0.80 29.7315.02 3.69 11.1754.05 8.71 15.5174.73 1.15 34.6417.69 0.0 27.86
6.13 2.0 6.71
MULTICLASS ADABOOST Z-SCOREADABOOST P1
3.45 1.45 4.0918.24 12.24 5.27
2.99 49.69 37.0529.32 0.43 33.9571.49 0.22 22.5849.48 0.2 36.0613.99 3.94 10.1065.74 0.79 21.8882.30 1.24 37.5561.03 0.0 59.2711.23 1.43 13.05
Table 4.3: Test Error rate Comparison of Multiclass AdaBoost and AdaBoost-P1
MULTI-SPLIT DECISION TREES DECISION STUMPS
DATA SETNAME
SPAMBASEIRISFOREST FIREGLASSWINE
MULTICLASS ADABOOST PAIREDADABOOST P1 T-TEST
4.48 7.71 9.486.25 5.25 0.94
11.80 5.0 2.5430.43 0.9 2.86
2.76 2.3 0.23
MULTICLASS ADABOOST PAIREDADABOOST P1 T-TEST
4.48 7.71 9.484.7 3.42 1.51
13.73 3.92 2.9110.43 9.7 1.21
6.11 1.26 2.55
66

For datasets without a clear partitioning into training and test sets, a comparison of Multiclass
AdaBoost with and without incorporating prior knowledge is given in Table 4.3. For these learning
tasks we used 10-fold cross validation to estimate the test accuracy of the learning algorithm and
hence the paired t-test has been used to compare the algorithms. A test value greater than 1.84,
in this case, indicates significantly different performance of the two algorithms. Performance of
Multiclass AdaBoost is better than AdaBoost-P1 {Multiclass AdaBoost with prior} only in case
of the spambase binary classification dataset whereas AdaBoost-P1 outperformed the Multiclass
AdaBoost for the remaining datasets.
Contrary to the intuition, it has also been observed that the impact of prior has been much
more significant in case of the decision stumps than in case of the multi-split decision trees. This
effect can be attributed to the peaky estimates of class probabilities in case of decision trees in
comparison of decision stumps. It can also be observed that the difference in performance of
algorithms is more significant in case of larger number of classes as the algorithm without prior
"mostly" giving a poor performance for such learning problems.
Another important aspect of these results is highlighted in Figure 4.1. These plots show the
test error vs. number of boosting iterations for Multiclass AdaBoost and AdaBoost-P1. Except for
the ring-norm dataset the convergence of AdaBoost-P1 required fewer iterations.
Tables 4.4 and 4.5 present a comparison of AdaBoost-M1 for dataset having different training
and test sets. AdaBoost-M1 performs extremely well only if the accuracy of base classifier is better
than 50% and it diverges otherwise. For most of the datasets used in our experiments the algorithm
diverged as the base classifiers had error rate greater than 50%. The impact of using a probabilistic
base classifiers along with the proposed method of incorporating prior into AdaBoost-M1 has been
huge both when a decision stump or multi-split decision trees are used as base classifiers. The
rate of convergence of the AdaBoost-M1 and AdaBoost-P1 is shown in Figure 4.2. The unusual
error rates of AdaBoost-M1 are due to the fact that a naive classifier such as a decision stump
mostly failed to grantee an accuracy greater than 50% whenever the number of classes is large.
67

0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
No of Iterations
% E
rror
Two Norm
Without PriorAdaBoost−P1
0 50 100 150 2000.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
No of Iterations%
Err
or
Three Norm
Without PriorAdaBoost−P1
0 50 100 150 2000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
No of Iterations
% E
rror
Ringnorm
Without PriorAdaBoost−P1
0 50 100 150 2000.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22UCI: Spambase
No of Iterations
% E
rror
0 50 100 150 2000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
No of Iterations
% E
rror
PenDigit
Without PriorAdaBoost−P1
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5Forest Fire
No of Iterations
% E
rror
0 50 100 150 2000.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
No of Iterations
% E
rror
Vowel Recognition
Without PriorAdaBoost−P1
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
No of Iterations
% E
rror
Land Stat
Without PriorAdaBoost−P1
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
No of Iterations
% E
rror
Waveform
Without PriorAdaBoost−P1
0 50 100 150 2000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
No of Iterations
% E
rror
Yeast
Without PriorAdaBoost−P1
0 50 100 150 2000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
No of Iterations
% E
rror
Abalone
Without PriorAdaBoost−P1
0 50 100 150 2000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
No of Iterations
% E
rror
Letters
Without PriorAdaBoost−P1
Figure 4.1: Test Error: AdaBoost-P1 vs Multiclass AdaBoost
68

The weight of the selected classifiers computed at step 5 of Algorithm 1 using αt = 12log(
1−εtεt
)becomes negative in such a case and the algorithm diverges. Such behaviour of AdaBoost-M1 is
well known and has already been reported in literature [103].
Table 4.6 presents the result of our second set of experiment that studies the effect of prior qual-
ity on the convergence of Multiclass AdaBoost. log(k)-split decision trees have been used in these
experiments and the prior is changed from negatively-biased (prior that assigns low probability to
actual class) to perfect prior (Prior that assigns high probability to actual class).
Figure 4.3 presents the results of our last experiment that studies the effect of prior if data is
sparse. This experiment has been repeated for the two larger datasets with training data sampled
uniformly to create new training set. For these experiment the prior was fixed in the beginning and
the experiment has been repeated with training dataset of sizes 1%, 5%, 10%, 20%, 50% and 100%
of the original training data. The figure shows the test error of AdaBoost-P1 vs. the proportion of
training data used.
4.4 Summary
This chapter described an effective method of incorporating prior knowledge into AdaBoost based
ensemble learning algorithms. The idea behind incorporating the prior into boosting in our ap-
Table 4.4: Test Error rate Comparison of AdaBoost-M1 and AdaBoost-P1
MULTI-SPLIT DECISION TREES DECISION STUMPS
DATA SETNAME
TWO NORMTHREE NORMRING NORMPEN DIGITVOWELLAND STATEWAVEFORMYEASTABALONELETTERSSEGMENTATION
ADABOOST ADABOOST Z-SCOREM1 P1
2.95 1.45 3.2318.39 12.24 5.39
5.62 50.68 35.4110.60 3.63 11.3163.28 42.12 6.4422.34 16.54 4.3317.81 5.03 11.5443.56 23.96 6.5899.90 44.98 28.0899.03 47.81 51.84
7.66 2.0 8.55
ADABOOST ADABOOST Z-SCOREM1 P1
2.95 1.45 3.2318.39 12.24 5.39
5.62 50.68 35.4199.17 18.98 68.295.46 34.34 19.599.95 18.74 52.520.23 9.69 8.560.99 26.93 19.999.90 34.45 31.899.15 17.02 74.499.95 1.43 63.8
69

0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
No of Iterations
% E
rror
Two Norm
Without PriorAdaBoost−P1
0 50 100 150 2000.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
No of Iterations
% E
rror
Three Norm
Without PriorAdaBoost−P1
0 50 100 150 2000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
No of Iterations
% E
rror
Ringnorm
Without PriorAdaBoost−P1
0 50 100 150 2000.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
No of Iterations
% E
rror
UCI: Spambase
Without PriorAdaBoost−P1
0 50 100 150 2000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
No of Iterations
% E
rror
PenDigit
Without PriorAdaBoost−P1
0 50 100 150 2000.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
No of Iterations%
Err
or
Forest Fire
Without PriorAdaBoost−P1
0 50 100 150 2000
0.02
0.04
0.06
0.08
0.1
0.12
0.14
No of Iterations
% E
rror
Glass
Without PriorAdaBoost−P1
0 50 100 150 2000.4
0.45
0.5
0.55
0.6
0.65
No of Iterations
% E
rror
Vowel Recognition
Without PriorAdaBoost−P1
0 50 100 150 2000.16
0.17
0.18
0.19
0.2
0.21
0.22
0.23
0.24
No of Iterations
% E
rror
Land Stat
Without PriorAdaBoost−P1
0 50 100 150 2000.2
0.25
0.3
0.35
0.4
0.45
No of Iterations
% E
rror
Yeast
Without PriorAdaBoost−P1
0 50 100 150 2000.4
0.5
0.6
0.7
0.8
0.9
1
No of Iterations
% E
rror
Abalone
Without PriorAdaBoost−P1
0 50 100 150 200
0.4
0.5
0.6
0.7
0.8
0.9
1
No of Iterations
% E
rror
Letters
Without PriorAdaBoost−P1
Figure 4.2: Test Error: AdaBoost-P1 vs AdaBoost-M1
70

Table 4.5: Test Error rate Comparison of AdaBoost-M1 and AdaBoost-P1
MULTI-SPLIT DECISION TREES DECISION STUMPS
DATA SETNAME
SPAMBASEIRISFOREST FIREGLASSWINE
ADABOOST ADABOOST PAIREDM1 P1 T-TEST
6.21 7.91 2.485.23 1.25 1.71
24.45 12.73 2.832.01 1.9 0.314.26 3.20 0.44
ADABOOST ADABOOST PAIREDM1 P1 T-TEST
5.21 7.91 2.483.16 2.78 0.72
23.53 3.92 2.8430.43 34.78 0.31
5.26 0.0 0.95
Table 4.6: Effect of Prior Quality on Error rate of Multiclass AdaBoost
DATA SET NEGATIVE BIASED UNIFORM FROM DATA BIASED PERFECT
PEN DIGITS 10.37 4.23 1.83 0.13 0VOWEL 65.72 59.83 26.78 3.32 0LETTERS 58.61 17.69 0 0 0
0 20 40 60 80 1000
5
10
15Letters
Training Data Percent
Err
or
Perc
ent
0 20 40 60 80 1000
5
10
15
20
25
30
35
40
45Pen Digits
Training Data Percent
Err
or
Perc
ent
Figure 4.3: Test Error: Effect of Prior in case of Sparse Training Data
71

proach is to modify the weight distribution over training examples using the prior during each
iteration. This modification affects the selection of base classifier included in the ensemble and
hence incorporate prior in boosting.
This method mitigates several shortcomings of an existing method by [82]. The method of
incorporating prior can mitigate the necessity of large amounts of training data, and irrespective
of the size of training data it can improve the convergence rate and accuracy of the boosting algo-
rithms. The new method of incorporating prior into boosting is generic and can be used with a large
class of boosting algorithms. The chapter also presented a detailed empirical evidence of our meth-
ods’ effectiveness and show improved convergence rate, improved accuracy and compensation for
lack of training data irrespective of the size of the training datasets.
72

Chapter 5
Boosting Based ANN Learning
A novel application of boosting for learning weights in a connectionist framework is presented in
this chapter. The discussion begins with the introduction of Boostron, a boosting based percep-
tron learning algorithm, that uses AdaBoost along with a homogeneous representation of decision
stumps to learn weights of a single layer perceptron. AdaBoost minimizes an exponential cost
function [35] instead of the mean squared error minimized by perceptron learning algorithm hence
it learns a different decision boundary for a given training set. Perceptrons trained using Boostron
have shown improved performance over several standard classification tasks of varying complexity.
A major limitation of the Boostron is it’s inability to learn a perceptron having hidden lay-
ers of neurons. To overcome this shortcoming, an extension of Boostron is presented that can be
used to learn a general linear, feed-forward artificial neural network (ANN) with a single hidden
layer and a single output neuron. The proposed method use two problem reductions along with
the Boostron algorithm to learn weights of neurons in a given ANN during a layer-wise iterative
traversal of all neurons in the network. Finally the proposed method is further extended to incor-
porate non-linearity into ANN learning by extending the inputs to each hidden layer neuron. The
inputs to a neuron are extended by introducing all products of features up to a certain degree as
additional inputs and hence non-linearity is incorporated into ANN learning.
73

The chapter is organized as follows. Section 5.1 provides a short Introduction of artificial
neural networks and the associated learning algorithms. A detailed description of the three com-
ponents of our proposed method is presented Section 5.2. Details of the experimental settings and
the corresponding results are presented in Section 5.4. Finally, Section 5.5 summarizes the main
contribution of the chapter and highlights some future directions.
5.1 Introduction
The single-layer Perceptron of Rosenblatt [72], as shown in Figure 5.1, is a simple mathematical
model for classification of patterns. It takes a vector x = [x0, x1, x2, . . . , xm] of features as input
and computes its class by calculating a dot product of x with an internally stored weight vector,
W = [w0, w1, w2, . . . , wm]. Most commonly, the input component x0 is permanently set to -1 with
weight w0 representing the magnitude of external bias. The output of a perceptron is computed
using some non-linear activation function such as sign and can be written as:
y = sign(W .xT
)= sign
(m∑i=0
wi.xi
)(5.1)
74

(a) Single-layer Perceptron with one output (b) Single-layer Perceptron with k outputs
Figure 5.1: Typical structure of a single-layer Perceptron
In supervised learning settings, the main aim of a neural network learning algorithm is to de-
duce an optimal set of synaptic weights from the provided input-output pairs of vectors specifying
a desired functional relationship to be modeled. For a neural networks similar to a single-layer per-
ceptron (i.e inputs are directly connected to the output units) a simple learning rule that iteratively
adjusts the connection weights so as to minimize the difference between desired and obtained out-
puts works well. For example, the well-studied Perceptron learning algorithm initializes the weight
vector to zeros and greedily modifies these weights for each misclassified training example (xi, yi)
using the Perceptron learning rule:
Wnew = Wold + η.(yi − yi).xi (5.2)
where η is a pre-specified constant known as learning rate, yi is the desired output and yi is the
estimated output.
For more complicated networks consisting of several interconnected perceptrons, such as the
network shown in Figure 5.2, the weight adjustment of hidden neurons posed the main research
75

challenge. However, since the emergence of back-propagation algorithm [74] a number of different
learning algorithms have been proposed to adapt the synaptic weights [46, 69, 38, 45, 42, 47].
Typically, these methods use an iterative weight update rule to learn an optimal network structure
from the training examples by minimizing an appropriate cost function. For example, the back-
propagation algorithm [74] uses the following weight update rule to minimize a measure of mean
squared error using gradient of error function w.r.t the weights
Wnew = Wold − η.∂E(W )
∂W(5.3)
The gradients for output neurons are computed from the definition of error function whereas the
gradients for hidden neurons are computed by propagation of gradients from the output to hidden
neurons. Since its introduction, the gradient based back-propagation learning algorithm has been
extensively used to learn models for a very diverse class of learning problems [97, 101, 63]
The gradient based back-propagation algorithm and its variants have a manual parameter (η:
learning rate) to play with which is tricker to work with as for smaller values of η the converges of
the algorithm becomes very slowly whereas for larger values the algorithm might become unstable.
The problems of converging to a local minimum and over-fitting are also amongst the well-known
issues with gradient descend based learning algorithms. Although the mean-squared error mini-
mized by the gradient based algorithm is suitable for regression problems, it might not work well
for classification tasks because most of the natural measures of classification accuracy are typically
non-smooth.
AdaBoost is one of the most successful ensemble learning algorithm that iteratively selects
several classifier instances by maintaining an adaptive weight distribution over the training ex-
amples. AdaBoost forms a linear combination of selected classifier instances to create an overall
ensemble. AdaBoost based ensembles rarely over-fit a solution even if a large number of base clas-
sifier instances are used [100] and it minimizes an exponential loss function by fitting a stage-wise
76

additive model [35]. As the minimization of classification error implies an optimization of a non-
smooth, non-differentiable cost function which can be best approximated by an exponential loss
[80], AdaBoost therefore performs extremely well over a wide range of classification problems.
Motivated by these facts, we have devised an AdaBoost based learning method to learn a feed-
forward artificial neural network. This method consists of three components: i) a boosting based
perceptron learning algorithm, called Boostron [7], that learns a perceptron without a hidden layer
of neurons, ii) an extension of the basic Boostron algorithm to learn a single output feed-forward
network of linear neurons [8] and finally iii) a method of using series representation of the activa-
tion function to introduce non-linearity in the neurons.
5.2 AdaBoost Based Neural Network Learning
This section begins with a short review of AdaBoost algorithm which is followed by a detailed
description of our method, called Boostron, to transform the problem of perceptron learning into
learning a boosting-based ensemble. An extension of the this method that enables learning of a
linear, feed-forward perceptron network with a single hidden layer and a single output neuron is
then presented. This discussion is succeeded by the introduction of a series based approach that
can be used to introduce non-linearity into the artificial neural network learning.
AdaBoost algorithm shown as Algorithm 1 (Chapter 2 ) is used to construct a highly accurate
classifier ensemble from a moderately accurate learning algorithm. It takes n labeled training ex-
amples as input and iteratively selects T classifiers by modifying a weight distribution maintained
on the training examples. The final ensemble is constructed by taking a linear combination of the
selected classifiers using
H(x) = sign
(T∑t=1
αt.ht(x)
)(5.4)
where T is the number of base learner instances in the ensemble and αt is the weight of classifier
instance ht that is computed using its error w.r.t the running distribution Dt.
77
The basic AdaBoost algorithm that uses a binary base classifier has been extended by Schapire
and Singer [84] to handle confidence-rated outputs of a base classifier. They presented a different
criterion of selecting the base classifier and a new method for computing the weight of the selected
classifier by using
αt =1
2ln
(1 + rt1− rt
)(5.5)
where rt is the difference of correctly classified and incorrectly classified instance weights.
5.2.1 Boostron: Boosting Based Perceptron Learning
Single-node decision trees are commonly referred to as stumps and have been frequently used
as base classifiers in AdaBoost[84, 66]. Boostron uses homogeneous coordinates to represent a
decision stump [43] as a weight vector and compute its dot product with an instance x to compute
the output. A decision stump typically makes decision based on only one of the feature values. For
real-valued features, a stump consists of a feature index, say j, and a threshold, U , such that all
instances are partitioned into two sets using an if-then-else rule of the following form
78

if xji ≤ U then
Class = +ve/-ve
else
Class = -ve/+ve
end if
For an instance vector xi ∈ Rm the above decision stump can be converted into an equivalent
classifier by using the inner product defined on Rm. For example, in case when a +1 label is
assigned if xji ≤ U and a −1 label otherwise, we can create a classifier equivalent to the decision
stump as
s(xi) = −(w.xi
T − U)
(5.6)
In equation 5.6, all components of the weight vector w = [w1, w2, ..., wm] are 0 except one of the
components wj . The sign of s(xi) is the classification decision and its magnitude can be regarded
as the confidence of prediction. Such a classifier can be represented as a single dot product by
representing instance xi and the vector w using the homogenous coordinates.
s(xi) = W .XiT (5.7)
where the vector Xi = [x1i , x
2i , ..., x
mi , 1] is obtained from the instance xi by adding a -1 as the
(m + 1)st component and the vector W = −[w1, w2, ..., wm, t] is obtained from w by adding
−U as the (m + 1)st component. When this new representation of stumps is used along with the
improved AdaBoost, the final form of boosted classifier, as given in Equation 5.4, becomes
H(x) = sign
(T∑t=1
αt.ht(X)
)= sign
(T∑t=1
αt.(Wt.X
T))
(5.8)
79

By using simple arithmetic manipulation the above equation can be written as,
H(x) = sign(W .XT
)(5.9)
where the (m+1)−dimensional vector, W =∑T
t=1
(αt.Wt
)= [w1, w2, . . . , wm+1], is the weighted
sum of the selected decision stump weight vectors. The classifier given by Equation 5.9 is equiv-
alent to a perceptron as given in Equation 5.1. Hence, the new representation of decision stumps
using homogeneous coordinates when used as base classifier learns a perceptron.
Next we present an extension of the above perceptron learning algorithm for learning parame-
ters of a linear ANN with a single hidden layer and a single output neuron. The proposed extension
of the Boostron uses a transformed set of examples and a layer-wise iterative traversal of neurons
in the network.
5.2.2 Beyond a Single Perceptron Learning
To present the proposed method, it is assumed that the inputs of a neuron at layer l are denoted
by xl0, xl1,..., xlk, . . ., xlm respectively where xl0 is permanently set to -1 and represents the bias
term. In this notation, the superscript denotes the layer number and the subscript denotes the input
feature number where m is the total number of neurons in the previous layer (i.e. layer l− 1). The
corresponding weights of the jth neuron at layer l are denoted by wlj0 , wlj1 , . . ., wljk
,. . . , wljm where
the weight of kth input from the previous layer to jth neuron in the present layer is denoted by wljk
for k ∈ {1, ...,m}.
A two-layer feed forward neural network with a set of m0 input neurons {I1, . . . , Im0} at layer
0, m1 hidden neurons {H1, . . . , Hm1} at layer 1 and a single output neuron O1 at layer 2 is shown
in Figure 5.2. If f l denotes the activation function used at layer l then the output, O1, of the neural
80

Figure 5.2: Feed-forward Network with a single hidden layer and a single output unit
network shown in Figure 5.2 is computed as follows:
O1 = f 2
(m1∑k=0
w21k.x2k
)(5.10)
where f 2 denotes the activation function used at layer 2.
Since each neuron in a single hidden-layer neural network is either an output or a hidden neuron
therefore the proposed algorithm uses two reductions:
• Learning an output neuron is reduced to that of Perceptron learning.
• Learning a hidden neuron is reduced to that of Perceptron learning.
These reductions are iteratively used to learn weights of each neuron in a given neural network.
The details of each is explained in the following subsections.
Learning Weights of an Output Neuron
The problem of learning an output neuron is reduced into that of of learning a perceptron by trans-
forming the training examples. Each training example (xi, yi) is transformed into a new training
81

example (x2i , yi) by computing the output of hidden layer neurons. For instance, in the neural
network of Figure 5.2 with m1 hidden neurons in a single hidden-layer each training instance
xi ∈ Rm0 is mapped to a new training instance x2i ∈ Rm1 by using the hidden-layer neurons. In
this mapping each component of the mapped instance x2i ∈ Rm1 corresponds to exactly one of the
hidden neuron output. After mapping the examples into Rm1 , the Boostron algorithm, as described
earlier, can be directly used to learn the weights of output neuron using the transformed training
examples (x2i , yi), i = 1...N .
Learning Weights of a Hidden Neuron
To learn the weights, {w1j0, w1
j1, . . . , w1
jm0}, of the jth hidden neuron Hj while keeping the rest of
network fixed, Eq. 5.10 is written as:
O = f 2
(w2
1j.x2j +
m1∑k=0,k 6=j
w21k.x2k
)(5.11)
Here, the term x2j is the output of the hidden neuron Hj and can be written as a combination of the
inputs to layer 1 and the weights of the neuron Hj as:
x2j = f 1
(m0∑i=0
w1ji.x1i
)(5.12)
Substituting this value of x2j in Eq. 5.11 gives:
O = f 2
(w2
1j.f 1
(m0∑i=0
w1ji.x1i
)+
m1∑k=0,k 6=j
w21k.x2k
)(5.13)
When both activation functions, f 1 and f 2, are linear, the above equation can be written as:
O = w21j.
m0∑i=0
w1ji.f 2(f 1(x1i
))+ f 2
(m1∑
k=0,k 6=j
w21k.x2k
)(5.14)
82

If C = f 21
(∑m1
k=0,k 6=j w21k.x2k
)denotes the output contribution of all hidden neurons other than the
neuron Hj and X1i = f 2 (f 1 (x1
i )) denotes the inputs transformed using the activation functions,
Eq. 5.14 can be written as:
O = w21j.
m0∑i=0
w1ji.X1
i + C (5.15)
A method of learning the weights of the hidden neuron Hj can be obtained by ignoring the effect
of fixed constant term C and the effect of magnitude of scale term w21j
on the overall output by
rewriting Eq. 5.15 as:
O = sgn(w21j
).
m0∑i=0
w11i.X1
i (5.16)
As the form of this equation is exactly equivalent to the computation of a perceptron, therefore we
can use the Boostron algorithm to learn the required weights, w1ji, i = 0, 1, . . . ,m0, of a hidden
neuron.
Algorithm 6 uses the above reductions and outlines a method of iterating over the neurons of
a linear feedforward neural network to learn its weights. The algorithm randomly initializes all
weights in the interval (0, 1) and assigns a randomly selected subset of features to each hidden-
layer neuron so that the hidden neuron uses only these features to compute its output. This random
assignment of overlapping feature subsets to neurons causes each hidden neuron to use a different
segment of the feature space for learning. After this initialization, the algorithm iterates between
the hidden layer and the output layer neurons in order to learn the complete neural network.
At the hidden layer, the algorithm iterates over the hidden neurons and compute their weights
in step 5-6 by using the transformed training examples computed in step 4. Weights of each hidden
neuron are computed using the Boostron algorithm while keeping the weights of all remaining
neurons fixed. These hidden neuron weights are then used to transform the training examples
(xi, yi), i = 1...N into new training examples (x2i , yi), i = 1...N which are subsequently used to
learn the output neuron using Boostron. This whole process is repeated a number of times specified
by the input parameter P .
83

Algorithm 6 :Algorithm to learn a linear feed-forward ANN using AdaBoost
Require: Training examples (x1, y1) . . . (xN , yN) wherexi is a training instance and yi ∈ {−1,+1} the corresponding class labelP is the number of iterations over ANN layers
1: Randomly initialize all weights in the range (0 1)
2: Randomly assign features to each hidden neuron.3: for j = 1 to P do4: Compute transformed training examples
(Xi, yi
), i = 1, 2, . . . , N where Xi =
[X10 , X
11 , . . . , X
1m0
] and X1i = f 2 (f 1 (x1
i ))
5: for Each hidden layer neuron Hj do6: Use the Boostron algorithm and the transformed training examples,
(Xi, yi
), to learn the
weights w1jk
of Hj where k = 0, 1, . . . ,m0
7: end for8: Compute transformed training examples
(X2i , yi
), i = 1, 2, . . . , N
where X2k = [x2
0, x21, . . . , x
2m1
]
9: Use the Boostron algorithm and the training examples(X2i , yi
), to learn the weights
w20, w
21, . . . , w
2m1, of the output neuron O1
10: end for11: Output the learned ANN weights.
84

This method of learning a feed-forward neural network works only if all the activation func-
tions used by neurons in a given neural network are linear. Without the linearity assumption, the
transformation used by the hidden neuron breaks and the method is no more applicable. Since
the extended network outputs a sum of linear classifiers, the resultant decision boundary is still a
hyperplane. To overcome these difficulties, we have introduced a series based solution to repre-
sent non-linearity so that the above method can be directly applied to learning a non-linear feed
forward network without much modification. Next we describe this novel method of introducing
non-linearity in ANN learning using a function approximation approach.
5.2.3 Incorporating Non-Linearity into Neural Network Learning
Any smooth infinitely differentiable function can be approximated at any point by a series using
one of the several well studied methods including Taylor/Laurent series [41], Chebyshev polyno-
mial approximation[17] or Minimax approximation [12]. Most of the commonly used activation
functions, including the sigmoid and tanh, are differentiable and hance can be approximated by
using a series representation. If Y = W.X denotes the result of dot product being carried out in-
side a neuron before the application of activation function the series representation would typically
involve computation of powers Y k for k = 1, 2, . . .. For example a Laurent series representation
of tanh(Y ) can be given as
tanh(Y ) = Y − 1
3Y 3 +
21
15Y 5 − 17
315Y 7 . . .
and that of sigmoid function is given as
1
1 + e−Y=
1
2+
1
4Y − 1
48Y 3 +
1
480Y 5 − 17
80640Y 7 . . .
85

In general a power series representation of a function can be written as
f(x) =∑k
αk.Yk (5.17)
Such a series representation specifies a fixed coefficient αk of Y k such that these coefficients can
be used to approximate the value of the function with arbitrary accuracy at any given point Y . The
idea of representing an activation function using a series has been extensively used in the past.
Such approximation have been used to efficiently (i.e. using minimum computational/hardware
resources) estimate values of the activation function and their derivatives[96] [9].
To derive the proposed method of attaining effect of non-linear activation function into the
extended Boostron algorithm, we use the value of Y =∑m
i=1wi.xi in equation 5.17 and consider
only the first K powers of the resulting equation to obtain an estimate of f(x) containing β =
m+m2 + . . .+mK terms
f(x) = α1.x1 + . . .+ αm.xm + αm+1.x12 + αm+2.x1.x2 + . . .+ αβ.xm
β (5.18)
Therefore, to introduce non-linearity we extend the inputs by computing all products of degree
less than or equal to β and use these extended inputs to learn weights of the perceptron in Algorithm
6 with the identity activation function. From implementation point of view, the extended inputs
can either be computed in a global way by extending all examples before step 2 in the Algorithm 6
or in a local way within each hidden neuron by extending its inputs just before step 6 of Algorithm
6. In the global way, non-linearity is incorporated by adding non-linear products as features in
all the examples whereas extending the dataset in local way incorporates non-linearity inside the
hidden neurons by extending the inputs internally. The uses of fixed weights for non-linear terms
is an important difference between the series representation of a given activation function and
the method described above. Rather than having fixed weights of non-linear terms, the proposed
86
method uses all products of degree up to β and uses the boosting algorithm to compute their
weights.
5.2.4 Multiclass Learning
The algorithm for learning a feed-forward ANN, as presented above, can only be used with net-
works having a single output neuron and working as binary classifiers. Several simple methods
for reducing a multiclass learning problem into a set of problems involving binary classification
are in common use. Such methods include the binary encoding of classes using error correcting
codes [28], the all-pairs approach of Hastie and Tibshirani [39] and a simple approach of one-
versus-remaining coding of classes. For each bit in the binary code of classes, a binary classifier
is trained and the outputs of all binary classifiers are combined, e.g. using Hamming distance,
to produce a final multiclass classifier. Results reported in this paper have been obtained using
one-versus-remaining coding of classes (+1 for the class and -1 for the remaining classes). This
method reduces a k-class classification problem into k binary classification problems.
5.3 Learning Artificial Neural Network for Intrusion Detection
This section combines the cascade structure of Chapter 3 and the feed-forward artificial neural
network to create an effective network intrusion detection system. The cascade structure is a gen-
eralization of one-vs-remaining encoding strategy of building a multi-class classifier by combining
several binary classifiers in the form of a tree structure. The two main algorithms for creating a
cascade and for using it to assign label to an instance are given below.
Algorithm 7 takes as input a K-class learning problem and uses a partitioning mechanism to
construct a binary classification learning problem to be used for partitioning the training data. For
a problem involving K classes there are 2K possible partitions to choose from and hence finding
an optimal partition of K-classes into two sets becomes intractable even for a moderate number of
87

Algorithm 7 : Build Cascade
Require: Examples (x1, y1) . . . (xn, yn) wherexi is a training instance and yi ∈ 1, 2, . . . , K are labels, and l is the number of partitions to use
1: if K = 1 or number of training examples is less than a threshold then2: Label the leaf node with the dominating class in the training data3: return4: end if5: for each possible partition P of the K classes into two sets P1 and P2 do
6: Create a binary classification problem by relabeling yi ∈ Pj as +1 or -1.
7: Learn a binary classifier B using Boosting based ANN learning algorithm.8: Choose this partition if it results in the most accurate classifierB amongst all such classifiers9: end for
10: Partition the training dataD into two partsD1 andD2 using the predictions of the best classifierB
11: Recursively repeat the above steps for each partition
classes. Therefore, in our experiments we only considered K different partitions of the K-classes
each obtained by dividing total classes into two sets such that one set contains only one of the
classes while the second set contains all remaining classes. Such partitioning is exactly equivalent
to encoding of classes using one-vs-remaining strategy along with an example filtering step. The
class best discriminated from the remaining classes is used to divide the learning problem into
smaller sub-problems in each cascade stage. Figure 3.2a shows a the structure of such a cascade.
Algorithm 8 : Compute Label of xRequire: Instance x to be labeled, and
Cascaded classifier C1: if C does not have Descendants then2: set class label of the node as the predicted label of x.3: return4: end if5: Use the classifier at the root of C to compute the label y of x6: Recursively compute label of x by using subtree corresponding to the computed label.
A traversal of the cascade starting at the root and then traversing the subtree corresponding to
the predicted class of an instance X can be used to assign a label to X . A recursive traversing
process used to assigning a label to an instance x is shown as Algorithm 8.
88

The next section describes the detailed experimental settings and corresponding results ob-
tained in several experiments carried out during the development of methods on boosting based
artificial neural network learning.
5.4 Experimental Settings and Results
A detailed empirical comparison of boosting based methods of learning a given neural network
with that of the corresponding neural network learning algorithms is given in this section. A set
of experiments has been carried out to compare the performance of a single neuron learned using
Boostron algorithm with that of a neural network trained using perceptron learning rule. Another
set of experiments has been conducted to compare the linear multi-layer perceptron learning al-
gorithm described in Section 5.2 with the corresponding network learned using back-propagation
learning algorithm [74]. Finally a set of experiments compares the performance of a non-linear
neural network learned using the proposed approach with a corresponding non-linear network
trained using a combination of sigmoid and linear activation functions.
All the experimental work reported in this paper has been performed on nine multiclass learning
problems and six binary classification datasets mostly from the UCI machine learning repository
[56]. These datasets also include three simulated binary classification problems: the two-norm,
three-norm and ring-norm taken from the work of Leo Breiman [16]. The main characteristics
of all the datasets including instance space dimension, training/test set sizes and the number of
classes are summarized in Table 5.1. Both synthetic and real-world learning problems of vary-
ing complexity are included in these datasets. The datasets cover a wide variety of classification
problems including a very small lung cancer dataset that has only 32 training examples, and larger
datasets including the Waveform recognition dataset.
89

Table 5.1: Description of Datasets
Dataset Dataset Training Test Total Error
Name Dimension Instances Instances Classes Estimate
Balance Scale 4 625 2 Cross Validation
Spambase 57 4601 2 Cross Validation
Two Norm 20 2000 2000 2 Training/Test
Three Norm 20 1000 2000 2 Training/Test
Ring Norm 20 2479 2442 2 Training/Test
Ionosphere 31 569 2 Cross Validation
Iris 4 150 3 Cross Validation
Forest Fire 5 500 4 Cross Validation
Glass 10 214 7 Cross Validation
Vowels 10 528 372 11 Cross Validation
Wine 13 178 3 Cross Validation
Waveform 21 5000 3 Cross Validation
Segmentation 20 210 2100 8 Training/Test
Yeast 8 980 504 10 Training/Test
Lung Cancer 56 32 3 Cross Validation
Estimate of error rate has been obtained using 10-fold cross validation for datasets without
explicit division into training and test sets. For such learning problems, the paired t-test as de-
scribed by Dietterich [24] has been used to measure the significance of difference between the
performance of algorithms. For 10 fold cross-validation a test value larger than 2.228 indicates
a significant difference between the two algorithms. Whenever a learning problem provided an
explicit division into training and test sets, the complete training set has been used to train the
network and the complete test set has been used to estimate the test error rate. For such learning
90

problems the statistical significance of difference in the performance of algorithms is measured
using McNemar’s test [29]. In case of McNemar’s test, a value of less than 3.841459 indicates
that with 95% confidence the null hypothesis is correct and therefore a value larger than 3.841459
means a significant difference between two algorithms [24].
For each learning problem, the reported results have been obtained for an ANN having 15
neurons in a single hidden layer and one output neuron. Results for the back-propagation learning
algorithm have been obtained by using sigmoid activation function in the hidden layer with 1000
epochs used to train the network. Since non-linear terms increase exponentially fast when larger
powers of Y are included in equation 5.17, only the quadratic terms have been used to incorporate
non-linearity of activation function in all the reported experiments. While learning a classifier
to handle more than two classes, a separate neural network has been trained for each class using
one-versus-remaining encoding of classes, therefore k different neural networks are created for a k-
class learning problem. For an instance x, the class corresponding to the neural network producing
the highest positive output is predicted as the class of x.
5.4.1 Results
The first set of results, shown in Table 5.2, compares the performance of Boostron with Perceptron
learning rule for nine classification tasks described in Table 5.1. The last column of the table lists
values of statistical test used to compare the two algorithms. A value in bold font indicate a sig-
nificant difference between the two algorithm. These results show a clear superiority of Boostron
over simple perceptron learning rule for adapting weights of a single layer network of linear neu-
rons. It has been found that the performance of Boostron is better than that of perceptron learning
rule for eight out of nine datasets and for the four learning problems including: Spambase, Iris,
Forest-Fire and Glass Boostron learned a significantly improved decision boundary. However, in
case of ring-norm dataset the perceptron learning rule converged to a significantly better classifier.
91

Table 5.2: Test Error Rate Comparison of Perceptron vs Boostron
Dataset
Name
Balance Scale
Spambase
Two Norm
Three Norm
Ring Norm
Iris
Forest Fire
Glass
Lung Cancer
Boostron Perceptron
Algorithm Learning
7.32 9.73
24.67 39.43
2.65 5.0
29.05 35.7
46.71 31.58
7.66 40.27
17.73 24.24
18.82 39.52
26.67 18.33
Difference
Significance
0.32
8.46
0.21
1.15
2.41
6.43
2.68
5.84
1.1
Table 5.3 provides a comparison of the extended Boostron algorithm with the back-propagation
algorithm with linear activation function for nine classification tasks. The error rates of extended
Boostron and back-propagation learning algorithm are similar for seven of the tasks and hence
the proposed method is comparable to the state-of-the-art back-propagation learning algorithm.
However Boostron converged to a significantly better decision surface for the smaller Lung-Cancer
dataset whereas the back-propagation algorithm found a significantly improved decision boundary
for the Glass identification dataset.
92

Table 5.3: Test Error Rate Comparison of Extended Boostron vs linear Back-propagation
Dataset
Name
Balance Scale
Spambase
Two Norm
Three Norm
Ring Norm
Iris
Forest Fire
Glass
Lung Cancer
Extended Back
Boostron Propagation
4.82 4.79
10.58 11.45
2.15 2.05
18.25 17.4
22.29 24.53
5.33 7.33
13.6 18.4
18.39 10.32
26.67 41.47
Difference
Significance
0.01
0.13
0.03
0.21
0.24
0.11
1.1
2.31
2.79
A comparison of Extended Boostron with the simple Boostron can also be made from Tables
5.2 and 5.3. This comparison makes sense as the extended multilayer version of Boostron also
learns a linear classifier like the single layer version of the algorithm. It is apparent from this
comparison that the extended Boostron learns a significantly improved linear decision-boundary.
93

Table 5.4: Boosting Based ANN Learning vs Back-propagation Algorithm
Boosting Based Back-Propagation
ANN Learning Algorithm
Dataset
Name
Balance Scale
Two Norm
Ionosphere
Wine
Waveform
Segmentation
Yeast
Lung Cancer
Training Test
Error Error
0.07 0.32
3.3 3.7
7.59 11.78
27.82 29.38
13.94 25.39
25.48 32.19
30.2 44.25
0 13.33
Training Test
Error Error
0.48 3.48
0.55 4.05
0 14
1.5 15.75
4.51 29.03
22.38 36.48
11.02 60.12
0 35
Difference
Significance
3.8
0.4
0.8
4.3
6.84
2.45
22.5
3.33
Another set of results is shown in Table 5.4 that compares the performance of boosting based
ANN learning algorithm with the standard error back-propagation algorithm. These results have
been obtained by using the global way of incorporating non-linear activation function as proposed
in Section 5.2. For the back-propagation algorithm, sigmoid activation function has been used
at the single hidden layer while the linear activation function has been used at the output layer.
It is apparent from these results and results presented previously that the introduction of non-
linearity resulted in a significantly improved decision surface learned by the proposed method.
Secondly, the presented results indicate that the boosting based neural network learning converged
to a significantly better decision surface than the standard back-propagation learning algorithm
for most of the classification tasks. It is also interesting to note that although the boosting based
method had a relatively higher training error rate for most of the learning tasks, it had lower test
error rates.
94

5.4.2 Artificial Neural Network Based Network Intrusion Detection System
The last set of experiments measures the performance of multiclass Boostron and that of a cascade
of Artificial Neural Network for creating a intrusion detection system for two benchmark intrusion
detection datasets: KDD Cup 99 and UNSW-NB15. The first dataset used in our experimental
work has been adopted from the KDD Cup 99 dataset [22] prepared and managed by MIT Lincoln
Labs as part of the 1998 DARPA Intrusion Detection Evaluation Program. Since its first use in the
International Knowledge Discovery and Data Mining Tools Competition in 1999, it has been a gold
standard intrusion detection dataset used by a large number of researchers in their experimental
work [30, 55, 3, 4, 11]. A detailed description of the dataset can be found in [11] and a summary
of the example distribution is given in Table 5.5. The dataset contains very few dominant classes
and hence it is an interesting optimization problem because a large class of algorithms converge to
suboptimal solution and ignore the sparse classes still attaining high overall accuracy.
The second network intrusion dataset, UNSW-NB15 [62], comprising of contemporary attacks
has also been used to evaluate the cascade based structure for detecting various types of intrusions.
This dataset contains a hybrid of modern normal and attack behaviors represented using 49 features
and containing nine attack categories. A partition of the overall dataset into training/testing datasets
is also provided. The test partition consists of 175,341 instances whereas the training partition
contains 82,332 instances. Table 5.6 lists the overall class distribution in the test and training data.
The next set of results present the performance of a simple Boostron based intrusion detection
system for the KDD-cup dataset. The dataset, in this experiment, has been partitioned randomly
into a training set {only 3% of data used for training} and a test set {remaining 97% data used for
testing} and the experiment repeated 10 times to obtained an average performance of the Boostron
based intrusion detection system. Table 5.7 gives the confusion matrix and the values of different
measures for the three dominant classes covering most of the dataset. The IDS achieved a training
accuracy of 96.23% and test accuracy of 96.19% for the class representing normal TCP/IP traffic.
The value of precision has been around 92% and the about 88% recall rate has been obtained for the
95

Table 5.5: KDD-cup class frequencies
Class No 1 2 3 4 5Class Name Back Buffer Overflow Ftp Write Guess Password IMAP# of Instances 2203 30 8 53 12Class No 6 7 8 9 10Class Name IP Sweep Land Load Module Multi Hop NeptuneInstance 1247 21 9 7 107201Class No 11 12 13 14 15Class Name NMAP Normal PERL PHF PODInstance 231 97278 3 4 264Class No 16 17 18 19 20Class Name Port Sweep Root Kit Satan Smurf SpyInstance 1040 10 1589 280790 2Class No 21 22 23Class Name Tear Drop Warez Client Warez MasterInstance 979 1020 20
Table 5.6: UNSW-NB15 class frequencies
Class No 1 2 3 4 5Class Name Normal Fuzzers Analysis Backdoors ExploitsTraining Instance 37000 6062 677 583 11132Test Instances 56000 18184 2000 1746 33393Class No 6 7 8 9 10Class Name DoS Generic Reconnaissance Shellcode WormsTraining Instance 4089 18871 3496 378 44Test Instance 12264 40000 10491 1133 130
96

normal class. For the other two classes the values of accuracy and precision have been higher than
99% whereas the value of recall has been better than 96%. The average values of the performance
measures across 23 classes are given in Table 5.8. The proposed IDS attained 99.6% accuracy,
95.34% precision and 95.34% recall rate. The results show that the IDS has a very high accuracy
without having a very high false positive rate.
Results: Cascade of Artificial Neural Networks for Intrusion Detection
The remaining results have been obtained by using the cascade of boosting based networks for
detecting intrusion in network traffic. For the KDD-cup dataset, five iterations of 2-fold cross-
validation have been used to evaluate the learned classifier. A small sample of training examples
from one of the partitions have been used for training while the examples in the other partition have
been used for testing. For the UNSW-NB15 dataset, a small fraction (about 2%) of the randomly
selected dataset has been used for training and the whole testing dataset is used for evaluating
the performance of proposed method. While building the cascade based classifier, classes have
always been partitioned into two sets one containing a single class and the second containing all
the remaining classes. For example, a classifier discriminating Smurf (i.e. class no 19 in KDD’99)
from the remaining classes has been placed at the root followed by Normal versus remaining
attacks and so on.
A boosting-based ANN with twenty hidden neurons and one output neuron has been used as a
classifier at each stage of the proposed cascade structure. The resulting cascade structure similar
to the one shown in Figure 3.2b with a ANN used as classifier in each internal node of the cascade
has been used. Example filtering process that uses an ANN classifier corresponding to a node
eliminated one of the classes at each stage of the cascade and hence the corresponding examples
are also eliminated at successive stages.
Since a major objective of any network intrusion detection system is to discriminate normal
network traffic from intrusion therefore the next set of results presents performance of the proposed
97

Table 5.7: Performance of Intrusion Detection System for Three Dominant Classes
Training PerformanceNEPTUNE NORMAL SMURF
+ve -ve+ve 3448 125-ve 7 12888
+ve -ve+ve 2841 398-ve 223 13006
+ve -ve+ve 9356 2-ve 3 7107
Accuracy: 0.9920Precision: 0.9980
Recall: 0.9650
Accuracy: 0.9623Precision: 0.9272
Recall: 0.8771
Accuracy: 0.9997Precision: 0.9997Recall: 0.9998
Test PerformanceNEPTUNE NORMAL SMURF
+ve -ve+ve 100006 3622-ve 154 373761
+ve -ve+ve 82205 11824-ve 6381 377133
+ve -ve+ve 271298 134-ve 69 206042
Accuracy: 0.9921Precision: 0.9985Recall: 0.9650
Accuracy: 0.9619Precision: 0.9280Recall: 0.8743
Accuracy: 0.9996Precision: 0.9997Recall: 0.9995
98

Table 5.8: An average of the performance measures
Training Performance Test Performance
+ve -ve+ve 15719 33-ve 33 683
+ve -ve+ve 19801 966-ve 966 455810
Accuracy: 0.9960Precision: 0.9535Recall: 0.9536
Accuracy: 0.9959Precision: 0.9534Recall: 0.9535
cascade based system for discriminating the normal traffic from that representing some form of
intrusion. For the two datasets, confusion matrices along with the four performance measures for
detecting intrusion without marking the actual intrusion type is given in Table 5.9. For the KDD’99
dataset these performance measures have been computed using results of a single fold whereas the
test results of a complete run are reported for the UNSW-NB15 dataset. For the KDD’99 dataset the
trained cascade has a very low false positive rate (i.e. normal traffic marked as intrusion) of 3.77%
and a very low false negative rate (i.e. intrusion detected as normal traffic) of 1.26%. The values
of accuracy, precision, recall, and F1-score for this single experiment are also very reasonable. For
the UNSW-NB15 dataset the values of false positive and false negative rates are relatively poor
than the corresponding values for the KDD’99 dataset.
Table 5.9: Normal vs Intrusion
KDD-Cup 99 Dataset UNSW-NB15 DatasetConfusion Matrix
Normal IntrusionNormal 48821 46989 1832Intrusion 198057 2495 195562
Confusion MatrixNormal Intrusion
Normal 56000 48666 7334Intrusion 119341 15817 103524
Performance MeasuresAccuracy Precision Recall F1 Score98.25% 0.9496 0.9625 0.9556
Performance MeasuresAccuracy Precision Recall F1 Score86.40% 0.8674 0.9338 0.8994
99

The next set of results presents the overall performance of the system using five runs of two-
fold cross validation scheme for the KDD’99 dataset as described above. Table 5.10 reports the
fold-wise and average test performance of the trained system for the entire testing dataset. From
the reported results it is obvious the the proposed learning strategy has resulted into an intrusion
detection system with fairly high values for overall accuracy of 99.36% with both precision and re-
call having value above 0.97 and F1-score greater than 0.96. These high values have been obtained
for a larger testing dataset consisting of 50% of the overall data whereas a very small fraction of
the training data (about 1% only) has been used for training the classifier.
Table 5.11 presents a further insight into the results by providing a class-wise average values
of the four performance measures for eight dominant classes. These results have been obtained by
computing the corresponding values for each of the five two-fold runs and the average values of
the obtained results are reported. The classifier trained for intrusion detection has high accuracy
for fifteen classes but very low values for the remaining measures. As these classes have a sparse
representation in the overall training and testing datasets, therefore the system has been able to
achieve high overall values of performance measures even without having high values for these
classes.
Table 5.10: Fold-wise Test Performance
Iteration Accuracy%
Precision Recall F1 Score
1 99.41 0.977 0.972 0.9662 99.42 0.975 0.975 0.9673 99.57 0.975 0.980 0.9684 99.04 0.976 0.971 0.9655 99.41 0.976 0.973 0.966
Average Performance99.36 ±0.226
0.976 ±0.001
0.977 ±0.004
0.966 ±0.002
A similar set of results for the UNSW-NB15 dataset is summarized in Table 5.12. From these
results, it is revealed that the proposed system can detect intrusion successfully but determining
100

the type of intrusion is poorly marked for a number of cases. The average values of accuracy,
precision, recall are 86.40, 53.19 and 60.71 respectively. It is also important to note that unlike a
typical intrusion detection system, the proposed scheme marks the less frequently occurring classes
as intrusion because of the cascade structure however the actual label of such instances might be
incorrect.
Table 5.11: Test Performance for 8 Classes Constituting 99.65% of Examples
Class Total In-stance
Accuracy%Precision Recall F-1Score
Back 2203 99.55 0 0 -IP Sweep 1247 99.27 0.1905 0.0050 0.2562Neptune 107501 99.56 0.9922 0.9878 0.9899Normal 97278 98.03 0.9569 0.9431 0.9496PortSweep
1040 99.87 0.7655 0.7239 0.6496
Satan 1589 99.77 0.6528 0.8875 0.7323Smurf 280790 99.75 0.9965 0.9992 0.9979Tear Drop 979 99.89 1 0.5607 0.5607
Table 5.12: Test Performance for UNSW-NB15 dataset
Class Total Accuracy% Precision Recall F-1Score
Instance Accuracy% Precision Recall F-1Score
Analysis 2000 98.86 0 0 -Backdoors 1746 99.00 0 0 -DoS 12264 92.99 0.0625 0.0002 0.0003Exploits 33393 68.31 0.3158 0.5693 0.4062Fuzzers 18184 89.63 0 0 -Generic 40000 97.24 0.9081 0.9781 0.9418Normmal 56000 84.57 0.7389 0.7994 0.7679Reconnaissance 10491 93.06 0.4045 0.3374 0.3679Shellcode 1133 99.25 0 0 -Worms 130 99.92 0 0 -
The last set of results compares the proposed cascade-based approach with a two-layer neural
network having twenty hidden neurons with sigmoid activation function. In the previous experi-
101

ments, only a small fraction (about 5%) training data has been used for learning a classifier whereas
in this experiment a larger subset ( about 30% ) of randomly chosen training examples have been
used for comparing the two algorithms. Each experiment has been performed several times and
the average performance values for detecting intrusion are reported in Table 5.13. The proposed
approach obviously outperforms the standard feed-forward neural network for detecting intrusion.
Because of the cascade structure and the filtering mechanism used, each filtered example con-
tributes to the error accumulation only once. The overall change, i.e. Proposed - ANN, in the four
performance measures are reported in Table 5.14 and it is obvious that the overall improvement
obtained by using the proposed approach is significant. By comparing results presented in Tables
5.9 and 5.13, we can also make an interesting observation that the results obtained with a smaller
fraction (5%) of training dataset are better than those obtained when a larger fraction (30%) of
training data is used to build the classifier.
Table 5.13: Normal vs Intrusion
Cascade Feed forward ANNConfusion Matrix
Normal IntrusionNormal 56000 44766 11234Intrusion 119341 21171 98170
Confusion MatrixNormal Intrusion
Normal 56000 17533 38467Intrusion 119341 50406 68935
Performance MeasuresAccuracy Precision Recall F-1
Score81.52% 0.6789 0.7994 0.7343
Performance MeasuresAccuracy Precision Recall F-1
Score49.32% 0.2581 0.3131 0.2829
5.5 Summary
A boosting based method for learning a feed-forward ANN has been presented in this Chapter.
Following are the main components of our method
• Boostron: A new weight adaption method to learn weights of a single perceptron.
102

Table 5.14: Performance Difference of Proposed and Standard ANN for UNSW-NB15 dataset
Class Accuracy%Precision Recall F-1Score
Analysis 23.03 0.0034 -0.0015 0.0018Backdoors 01.42 0.0131 -0.0252 0.0013DoS -03.84 0.2630 0.6725 0.3884Exploits 00.25 -0.2101 -0.1174 -0.1833Fuzzers -00.99 0.1107 0.4701 0.2790Generic 28.75 0.9041 0.9769 0.9396Normal 35.25 0.4840 0.4863 0.4850Reconnaissance 03.54 -0.0496 -0.0327 -0.0394Shellcode 02.28 0.0532 0.1094 0.0756Worms 04.14 0.0675 0.0384 0.0490
• Boostron Extension: An extension of basic Boostron algorithm to learn a linear feed-
forward ANN having a single output neuron.
• Adding Non-Linearity into ANN Learning: A series based solution to incorporate non-
linearity in a feed-forward ANN.
Boostron uses confidence rated version of AdaBoost along with a new representation of deci-
sion stumps to learn the perceptron weights whereas the extension of Boostron uses a layer-wise
traversal of neurons in a given ANN along with the Boostron algorithm to learn weights of hidden
layer and output later. The extended method adapts the neuron weights by reducing these problems
into that of learning a single layer perceptron and hence mitigating a major limitation of Boost-
ron. For each neuron it can be considered a greedy method that minimizes an exponential cost
function typically associated with AdaBoost. Finally, a method has been proposed for introducing
non-linearity into ANN learning that uses products of features as extended inputs to each hidden
neuron and hence incorporated non-linearity into ANN learning.
The proposed methods have been empirically tested and compared to the corresponding learn-
ing algorithms for several standard classification tasks taken from the UCI machine learning repos-
itory. Datasets used in our experiments included both synthetic as well as datasets obtained from
103

real-world learning problems and the reported results reveled the superiority of proposed method
over the gradient based back-propagation algorithm for several learning tasks.
The proposed method of introducing non-linearity into ANN learning computed all products
of inputs up to a certain degree and uses these as extended inputs features. As the number of addi-
tional features introduced grow exponentially with the number of product terms used, therefore the
proposed method requires larger training time as compared to the standard learning methods. Dur-
ing the experiments it has been observed that the number of extended inputs becomes intractably
large even for a moderate number of input feature terms and hence requires large amount of ad-
ditional training time. However, this difficulty might be handled by devising a parallel version of
decision stump learning and a method of simultaneously updating neuron weights in the hidden
layer.
A cascade of Artificial Neural Networks trained using the boosting based method proposed in
this chapter has also been built for creating a network intrusion detection system and results of de-
tecting intrusion for two benchmark intrusion detection datasets have been presented and compared
with the results obtained by using an ANN trained using the standard gradient descent learning.
The intrusion detection system trained using the proposed method has very high overall accuracy,
precision, recall, and F1-score for the KDD’99 dataset while these measures are relatively lower
for the UNSW-NB15 intrusion detection dataset. The reported results also reveled that the trained
classifier had high performance for most of the well-represented classes. Although the intrusion
detection rate of the classifier trained using the proposed structure has been very high but for ex-
tremely sparse classes the proposed intrusion detection system has been unable to discriminate
between various types of intrusions.
104

Chapter 6
Conclusions and Future Research
Directions
Three major contribution of our boosting based research work has been presented in this disserta-
tion. These contributions include two methods of creating a multi-class ensemble using decision
stumps as base classifiers in AdaBoost, a novel method to incorporate prior into boosting and a
boosting based method to learn weights of a neural network.
Chapter 3 presented two new boosting based ensemble learning methods, M-Boost and CBC:
Cascade of Boosted Classifiers. The M-Boost algorithm solves a multi-class learning problem
without dividing it into multiple binary classification problems whereas the cascade approach is a
generalization of the coding based approaches for creating a multiclass ensemble.
M-boost introduced new classifier selection and classifier combining rules. It uses a naive
domain partitioning classifier as base classifier to handle multi-class problem without breaking it
into multiple binary problems. M-Boost introduced a global optimality measures for selecting a
weak classifier as compared to standard AdaBoost variants that use a localized greedy approach. It
uses a reweighing strategy for training examples as opposed to standard exponential multiplicative
factor and it outputs a probability distribution over all classes rather than a binary classification
105

decision. M-Boost has been used to create classifier for several learning tasks available on the UCI
machine learning repository. M-boost has consistently performed much better than AdaBoost-M1
and Multi-class AdaBoost for 9 out of 11 datasets in terms of classification accuracy. Empirical
evidence indicates that M-Boost is especially effective when the number of classes is large. On
binary datasets, M-Boost is better than Modest AdaBoost and comparable to Gentle and Real Ad-
aBoost and it is comparable to AdaBoost-MH and better than Multi-class AdaBoost on multiclass
datasets.
Chapter 3 also presented a cascade approach of creating a multi-class classifier by learning
a multi-split decision tree. This proposed algorithm presents a novel approach in the sense that
earlier encoding based approaches have been introduced in the literature that require dividing a
problem into several independent binary sub-problems. Whereas our approach does not require
explicit encoding of the given multiclass problem, rather it learns a multi-split decision tree and
implicitly learns the encoding as well. In this recursive approach, an optimal partition of all classes
is selected from the set of all possible partitions of classes. The training data is relabeled so that
each class in a given partite gets the same label. The newly labeled training data, typically, has
smaller number of classes than the original learning problem. The reduced multiclass learning
problem is learned through applying a multiclass algorithm. The method has been applied to
successfully build an effective network intrusion detection system.
A novel way of incorporating prior into a large class of boosting algorithms second major con-
tribution has been presented in chapter 4 that mitigates some of the limitation of existing method
of incorporating prior in the boosting. The idea behind incorporating the prior into boosting in
our approach is to modify the weight distribution over training examples using the prior during
each iteration. This modification affects the selection of base classifier included in the ensemble
and hence incorporate prior in boosting. The results show improved convergence rate, improved
accuracy and compensation for lack of training data irrespective of the size of the training datasets.
Chapter 5 presented our last contribution to boosting literature. It presents boosting-based
106

methods for learning weights of a network in a connectionist framework. our method minimizes
an exponential cost function instead of the mean square error minimization, which is the standard
used in most of the perceptron/neural network learning algorithms. We introduced this change
with the aim to achieve better classification accuracy as exponential loss is better measure for
classification problems as compared to the mean-squared error criteria.
First of the algorithms presented in this chapter is called Boostron and learns weights of a
single layer perceptron by using decision stumps along with AdaBoost. Our main contribution in
this regard has been the introduction of a new representation of decision stumps that when used
as base learner in AdaBoost becomes equivalent to a perceptron. Further extensions of Boostron
to learn a multi-layered perceptron with linear activation function have also been presented in this
chapter. The generalized method has been used to learn weights of a feed-forward artificial neural
network having linear activation functions, a single hidden layer of neurons and one or more output
neurons. This generalization uses an iterative strategy along with the Boostron algorithm to learn
weights of hidden layer neurons and output neurons by reducing these problems into problems of
learning a single layer perceptron.
6.1 Limitations and Future Research Directions
This section describes some of the limitations of our present research and also highlights future
research directions to mitigate these limitations.
6.1.1 Incorporating Prior into Boosting
Most of the well studied classifiers in machine learning literature generate a real valued outputs
and therefore to use such methods as base learners in AdaBoost-P1 we need to artificially convert
the output of such classifier into probabilities. However, the generalized two step method of incor-
porating prior into boosting does not require a probabilistic base classifier. Therefore, the use of
107

real valued classifier as base learners in AdaBoost-P1 can be one possible research direction.
The use of artificially generated prior in our experiments is another major limitation of our
present research and it seems plausible that we might use AdaBoost-P1 in some real word scenario
where an actual prior/domain knowledge might be available.
A further insight into the ability of AdaBoost-P1 for incorporating prior must be investigated
and a detailed comparison of AdaBoost-P1 with other machine learning methods like SVM, Neural
Networks, Random forests must be performed.
The method of incorporating prior might also be applied for building large-scale classification
systems where thousands of features and millions of training examples are typically available.
6.1.2 Boosting-Based ANN learning methods
Use of a single output neuron and only one hidden layer of neurons is the first most important
limitation of our method of learning an ANN using AdaBoost. Once can further extend the method
to learn weights of an ANN having multiple hidden layers of neurons and several neurons in the
output layer.
Since the method of introducing non-linearity introduces an exponentially large number of
features therefore it requires an exponentially additional computational resources during training
and test phases. Since the introduction of new features is really equivalent to the idea of mapping
the problem into a high-dimensional space and then computing a linear classifier in that higher
dimensional space therefore one can use the kernel trick used in SVM to avoid the penalty of
going into a high dimensional space.
The use of our method in several other areas of machine learning might be studied in future.
108

6.1.3 Multiclass Ensemble Learning
One major limitation of our research related to M-Boost (multiclass ensemble learning method) is
that the algorithm has been tested only on small datasets. Once can use this probabilistic classifier
for building a large-scale classification system that involve a large number of classes and training
examples.
A detailed analysis of M-Boost needs to be done in order to understand its basic properties. As
a starting point in this direction one might study the effect of each individual feature of M-Boost
in detail in order to completely understand its properties.
109

Bibliography
[1] Abney, S., Schapire, R. E., and Singer, Y. (1999). Boosting applied to tagging and pp at-
tachment. In Proceedings of the Joint SIGDAT Conference on Empirical Methods in Natural
Language Processing and Very Large Corpora, volume 130, pages 132–134.
[2] Allwein, E. L., Schapire, R. E., and Singer, Y. (2001). Reducing multiclass to binary: A
unifying approach for margin classifiers. The Journal of Machine Learning Research, 1:113–
141.
[3] Altwaijry, H. and Algarny, S. (2012). Bayesian based intrusion detection system. Journal of
King Saud University - Computer and Information Sciences, 24(1):1 – 6.
[4] Amiri, F., Yousefi, M. R., Lucas, C., Shakery, A., and Yazdani, N. (2011). Mutual information-
based feature selection for intrusion detection systems. Journal of Network and Computer
Applications, 34(4):1184 – 1199.
[5] Baig, M. and Awais, M. M. (2012). Global reweighting and weight vector based strategy for
multiclass boosting. In Neural Information Processing, pages 452–459. Springer.
[6] Baig, M., El-Alfy, E.-S. M., and Awais, M. M. (2014a). Intrusion detection using a cascade
of boosted classifiers (cbc). In Neural Networks (IJCNN), 2014 International Joint Conference
on, pages 1386–1392. IEEE.
110

[7] Baig, M. M., Awais, M. M., and El-Alfy, E.-S. M. (2014b). Boostron: Boosting based percep-
tron learning. In Neural Information Processing, pages 199–206. Springer.
[8] Baig, M. M., El-Alfy, E.-S. M., and Awais, M. M. (2015). Learning rule for linear multilayer
feedforward ann by boosted decision stumps. In Neural Information Processing, pages 345–
353. Springer.
[9] Basterretxea, K., Tarela, J., and Del Campo, I. (2004). Approximation of sigmoid function
and the derivative for hardware implementation of artificial neurons. In Circuits, Devices and
Systems, IEE Proceedings-, volume 151, pages 18–24. IET.
[10] Bauer, E. and Kohavi, R. (1999). An empirical comparison of voting classification algo-
rithms: Bagging, boosting, and variants. Machine learning, 36(1-2):105–139.
[11] Boln-Canedo, V., Snchez-Maroo, N., and Alonso-Betanzos, A. (2011). Feature selection and
classification in multiple class datasets: An application to KDD cup 99 dataset. Expert Systems
with Applications, 38(5):5947 – 5957.
[12] Braess, D. and Hackbusch, W. (2005). Approximation of 1/x by exponential sums in [1,∞).
IMA Journal of Numerical Analysis, 25(4):685–697.
[13] Breiman, L. (1996a). Bagging predictors. Machine learning, 24(2):123–140.
[14] Breiman, L. (1996b). Bias, variance, and arcing classifiers.
[15] Breiman, L. (1998). Arcing classifiers. The Annals of Statistics, 26(3):801–849.
[16] Breiman, L., Friedman, J., Stone, C. J., and Olshen, R. A. (1984). Classification and regres-
sion trees. CRC press.
[17] Cheney, E. W. and Lorentz, G. G. (1980). Approximation theory III. Academic Press.
111

[18] Collins, M., Schapire, R. E., and Singer, Y. (2002). Logistic regression, adaboost and breg-
man distances. Machine Learning, 48(1-3):253–285.
[19] Cooper, G. F. (1990). The computational complexity of probabilistic inference using bayesian
belief networks. Artificial intelligence, 42(2):393–405.
[20] Coryn A.L, Bailer-Jones, K. S. (2011). Combining probabilities. Technical report, DPAC:
Data Processing and Analysis Consortium, Max Planck Institute for Astronomy, Heidelberg.
[21] Cover, T. M. and Hart, P. E. (1967). Nearest neighbor pattern classification. Information
Theory, IEEE Transactions on, 13(1):21–27.
[22] Cup, K. (1999). Dataset: Kdd cup 1999 dataset for network based intrusion detection systems.
available at the following website http://kdd. ics. uci. edu/databases/kddcup99/kddcup99. html.
[23] Dettling, M. and Bühlmann, P. (2003). Boosting for tumor classification with gene expression
data. Bioinformatics, 19(9):1061–1069.
[24] Dietterich, T. G. (1998). Approximate statistical tests for comparing supervised classification
learning algorithms. Neural computation, 10(7):1895–1923.
[25] Dietterich, T. G. (2000a). Ensemble methods in machine learning. In Multiple classifier
systems, volume 1857 of Lecture Notes in Computer Science, pages 1–15. Springer Berlin Hei-
delberg.
[26] Dietterich, T. G. (2000b). An experimental comparison of three methods for construct-
ing ensembles of decision trees: Bagging, boosting, and randomization. Machine learning,
40(2):139–157.
[27] Dietterich, T. G. (2002). Ensemble learning. The handbook of brain theory and neural
networks, 2:110–125.
112

[28] Dietterich, T. G. and Bakiri, G. (1995). Solving multiclass learning problems via error-
correcting output codes. Journal of Artificial Intelligence Research, 2(1):263–286.
[29] Everitt, B. S. (1992). The analysis of contingency tables. CRC Press.
[30] Feng, W., Zhang, Q., Hu, G., and Huang, J. X. (2013). Mining network data for intrusion
detection through combining SVMs with ant colony networks. Future Generation Computer
Systems.
[31] Freund, Y. (1995). Boosting a weak learning algorithm by majority. Information and Com-
putation, 121(2):256–285.
[32] Freund, Y. and Mason, L. (1999). The alternating decision tree learning algorithm. In icml,
volume 99, pages 124–133.
[33] Freund, Y. and Schapire, R. E. (1997). A decision theoretic generalization of on line learning
and an application to boosting. Journal of computer and system sciences, 55(1):119–139.
[34] Freund, Y., Schapire, R. E., et al. (1996). Experiments with a new boosting algorithm. In
ICML, volume 96, pages 148–156.
[35] Friedman, J., Hastie, T., and Tibshirani, R. (2000). Additive logistic regression: a statistical
view of boosting. The annals of statistics, 28(2):337–407.
[36] Friedman, J. H. (1997). On bias, variance, 0/1Uloss, and the curse-of-dimensionality. Data
mining and knowledge discovery, 1(1):55–77.
[37] Grove, A. J. and Schuurmans, D. (1998). Boosting in the limit: Maximizing the margin of
learned ensembles. In AAAI/IAAI, pages 692–699.
[38] Hagan, M. T. and Menhaj, M. B. (1994). Training feedforward networks with the marquardt
algorithm. IEEE Transactions on Neural Networks,, 5(6):989–993.
113

[39] Hastie, T. and Tibshirani, R. (1998). Classification by pairwise coupling. The Annals of
Statistics, 26(2):451–471.
[40] Haussler, D., Kearns, M., Littlestone, N., and Warmuth, M. K. (1991). Equivalence of models
for polynomial learnability. Information and Computation, 95(2):129–161.
[41] Hildebrand, F. B. (1962). Advanced calculus for applications, volume 63. Prentice-Hall
Englewood Cliffs, NJ.
[42] Huang, G.-B., Zhu, Q.-Y., and Siew, C.-K. (2004). Extreme learning machine: a new learning
scheme of feedforward neural networks. In Proceedings of IEEE International Joint Conference
on Neural Networks, volume 2, pages 985–990.
[43] Iba, W. and Langley, P. (1992). Induction of one-level decision trees. In Proceedings of the
9th International Conference on Machine Learning, pages 233–240.
[44] Iyer, R. D., Lewis, D. D., Schapire, R. E., Singer, Y., and Singhal, A. (2000). Boosting for
document routing. In Proceedings of the ninth international conference on Information and
knowledge management, pages 70–77. ACM.
[45] Jin, W., Li, Z. J., Wei, L. S., and Zhen, H. (2000). The improvements of bp neural network
learning algorithm. In Proceedings of 5th IEEE International Conference on Signal Processing,
volume 3, pages 1647–1649.
[46] Johansson, E. M., Dowla, F. U., and Goodman, D. M. (1991). Backpropagation learning for
multilayer feed-forward neural networks using the conjugate gradient method. International
Journal of Neural Systems, 2(04):291–301.
[47] Karaboga, D., Akay, B., and Ozturk, C. (2007). Artificial bee colony (abc) optimization
algorithm for training feed-forward neural networks. In Modeling decisions for artificial intel-
ligence, pages 318–329. Springer.
114

[48] Kearns, M. (1988). Thoughts on hypothesis boosting. Unpublished manuscript.
[49] Kearns, M., Li, M., Pitt, L., and Valiant, L. (1987). On the learnability of boolean formulae.
In Proceedings of the nineteenth annual ACM symposium on Theory of computing, pages 285–
295. ACM.
[50] Kearns, M. and Valiant, L. (1994). Cryptographic limitations on learning boolean formulae
and finite automata. Journal of the ACM (JACM), 41(1):67–95.
[51] Kearns, M. J. and Valiant, L. G. (1988). Learning Boolean formulae or finite automata is as
hard as factoring. Harvard University, Center for Research in Computing Technology, Aiken
Computation Laboratory.
[52] Kearns, M. J. and Vazirani, U. V. (1994). An introduction to computational learning theory.
MIT press.
[53] Kittler, J., Hatef, M., Duin, R. P., and Matas, J. (1998). On combining classifiers. Pattern
Analysis and Machine Intelligence, IEEE Transactions on, 20(3):226–239.
[54] Krupka, E. and Tishby, N. (2007). Incorporating prior knowledge on features into learning.
In International Conference on Artificial Intelligence and Statistics, pages 227–234.
[55] li, W. and Liu, Z. (2011). A method of SVM with normalization in intrusion detection.
Procedia Environmental Sciences, 11, Part A:256 – 262.
[56] Lichman, M. (2013). Uci: Machine learning repository.
[57] Liu, B., Li, X., Lee, W. S., and Yu, P. S. (2004). Text classification by labeling words. In
AAAI, volume 4, pages 425–430.
[58] Mabu, S., Obayashi, M., and Kuremoto, T. (2015). Ensemble learning of rule-based evolu-
tionary algorithm using multi-layer perceptron for supporting decisions in stock trading prob-
lems. Applied Soft Computing, 36:357–367.
115

[59] Meir, R. and Rätsch, G. (2003). An introduction to boosting and leveraging. In Advanced
lectures on machine learning, pages 118–183. Springer.
[60] Mitchell, A. R. (1998). Learnability of a subclass of extended pattern languages. In Pro-
ceedings of the eleventh annual conference on Computational learning theory, pages 64–71.
ACM.
[61] Mousavi, R. and Eftekhari, M. (2015). A new ensemble learning methodology based on
hybridization of classifier ensemble selection approaches. Applied Soft Computing, 37:652–
666.
[62] Moustafa, N. and Slay, J. (2016). The evaluation of network anomaly detection systems:
Statistical analysis of the unsw-nb15 data set and the comparison with the kdd99 data set. In-
formation Security Journal: A Global Perspective.
[63] Munawar, S., Nosheen, M., and Babri, H. A. (2012). Anomaly detection through nn hybrid
learning with data transformation analysis. International Journal of Scientific & Engineering
Research, 3(1):1–6.
[64] Niyogi, P., Girosi, F., and Poggio, T. (1998). Incorporating prior information in machine
learning by creating virtual examples. Proceedings of the IEEE, 86(11):2196–2209.
[65] Oza, N. C. and Tumer, K. (2008). Classifier ensembles: Select real-world applications. In-
formation Fusion, 9(1):4–20.
[66] P. Viola, M. J. (2001). Rapid object detection using a boosted cascade of simple features. In
IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2001,
volume 1, page 511.
[67] Pearl, J. (1986). Fusion, propagation, and structuring in belief networks. Artificial intelli-
gence, 29(3):241–288.
116

[68] Pitt, L. and Valiant, L. G. (1988). Computational limitations on learning from examples.
Journal of the ACM (JACM), 35(4):965–984.
[69] Riedmiller, M. and Braun, H. (1993). A direct adaptive method for faster backpropagation
learning: The rprop algorithm. In Proceedings of IEEE International Conference on Neural
Networks, pages 586–591.
[70] Rochery, M., Schapire, R., Rahim, M., Gupta, N., Riccardi, G., Bangalore, S., Alshawi, H.,
and Douglas, S. (2002). Combining prior knowledge and boosting for call classification in
spoken language dialogue. In Langley, P., editor, International Conference on Acoustics Speech
and Signal Processing (ICASSP 2002), pages 1207–1216, Stanford, CA. Morgan Kaufmann.
[71] Rodriguez, J. J., Kuncheva, L. I., and Alonso, C. J. (2006). Rotation forest: A new clas-
sifier ensemble method. Pattern Analysis and Machine Intelligence, IEEE Transactions on,
28(10):1619–1630.
[72] Rosenblatt, F. (2958). The perceptron: a probabilistic model for information storage and
organization in the brain. Psychological review, 65(6):386–.
[73] Rudin, C., Daubechies, I., and Schapire, R. E. (2004). The dynamics of adaboost: Cyclic
behavior and convergence of margins. The Journal of Machine Learning Research, 5:1557–
1595.
[74] Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1988). Learning representations by
back-propagating errors. Cognitive modeling, 5(3):1.
[75] Rumhlhart, D. E. and L., M. J. (1990). Parallel and Distributed Processing: Explorations in
Microstructure of Cognition, Volume 1: Foundations. MIT Press.
[76] Schapire, R. E. (1990a). Pattern languages are not learnable. In COLT, pages 122–129.
[77] Schapire, R. E. (1990b). The strength of weak learnability. Machine learning, 5(2):197–227.
117

[78] Schapire, R. E. (1997). Using output codes to boost multiclass learning problems. In ICML,
volume 97, pages 313–321.
[79] Schapire, R. E. (2003). The boosting approach to machine learning: An overview. Lecture
Notes in Statistics, pages 149–172.
[80] Schapire, R. E. (2013). Explaining adaboost. In Empirical inference, pages 37–52. Springer.
[81] Schapire, R. E., Freund, Y., Bartlett, P., and Lee, W. S. (1998). Boosting the margin: A new
explanation for the effectiveness of voting methods. Annals of statistics, pages 1651–1686.
[82] Schapire, R. E., Rochery, M., Rahim, M., and Gupta, N. (2002). Incorporating prior knowl-
edge into boosting. In ICML, volume 2, pages 538–545.
[83] Schapire, R. E., Rochery, M., Rahim, M., and Gupta, N. (2005). Boosting with prior knowl-
edge for call classification. IEEE transactions on speech and audio processing, 13(2):174–181.
[84] Schapire, R. E. and Singer, Y. (1999). Improved boosting algorithms using confidence-rated
predictions. Machine learning, 37(3):297–336.
[85] Schapire, R. E. and Singer, Y. (2000). Boostexter: A boosting based system for text catego-
rization. Machine learning, 39(2):135–168.
[86] Schölkopf, B., Simard, P., Smola, A. J., and Vapnik, V. (1998). Prior knowledge in support
vector kernels. Advances in neural information processing systems, pages 640–646.
[87] Schölkopf, B. and Smola, A. (1998). Support vector machines. Encyclopedia of Biostatistics.
[88] Simmonds, A., Sandilands, P., and van Ekert, L. (2004). An ontology for network security
attacks. In Applied Computing, pages 317–323. Springer.
[89] Snedecor, G. W. and Cochran, W. G. (1967). Statistical Methods. Ames. Iowa State University
Press Iowa.
118

[90] Sun, Y., Butler, T. S., Shafarenko, A., Adams, R., Loomes, M., and Davey, N. (2007). Word
segmentation of handwritten text using supervised classification techniques. Applied Soft Com-
puting, 7(1):71–88.
[91] Valentini, G. and Masulli, F. (2002). Ensembles of learning machines. In Neural Nets, pages
3–20. Springer.
[92] Valiant, L. G. (1984). A theory of the learnable. Communications of the ACM, 27(11):1134–
1142.
[93] Vapnik, V. N. and Vapnik, V. (1998). Statistical learning theory, volume 1. Wiley New York.
[94] Vezhnevets, A. and Vezhnevets, V. (2005). Modest adaboost: teaching adaboost to generalize
better. In Graphicon, volume 12, pages 987–997.
[95] Viola, P. and Jones, M. J. (2004). Robust real-time face detection. International journal of
computer vision, 57(2):137–154.
[96] Vlcek, M. (2012). Chebyshev polynomial approximation for activation sigmoid function.
Neural Network World, 22(4):387–393.
[97] Wang, L., Zeng, Y., and Chen, T. (2015). Back propagation neural network with adaptive
differential evolution algorithm for time series forecasting. Expert Systems with Applications,
42(2):855–863.
[98] Wang, Q., Garrity, G. M., Tiedje, J. M., and Cole, J. R. (2007). Naive bayesian classifier for
rapid assignment of rrna sequences into the new bacterial taxonomy. Applied and environmental
microbiology, 73(16):5261–5267.
[99] Wu, X. and Srihari, R. (2004). Incorporating prior knowledge with weighted margin sup-
port vector machines. In Proceedings of the tenth ACM SIGKDD international conference on
Knowledge discovery and data mining, pages 326–333. ACM.
119

[100] Wyner, A. J. (2003). On boosting and the exponential loss. In AISTATS.
[101] Yuan, J. and Yu, S. (2014). Privacy preserving back-propagation neural network learning
made practical with cloud computing. IEEE Transactions on Parallel and Distributed Systems,
25(1):212–221.
[102] Zhu, J. and Chen, W. (2005). Improving text categorization using domain knowledge. In
Natural Language Processing and Information Systems, pages 103–113. Springer.
[103] Zhu, J., Zou, H., Rosset, S., and Hastie, T. (2009). Multi-class adaboost. Statistics and its
Interface, 2(3):349–360.
120


















