1 Visibility in Computer Graphics Toni Sellarès Unversitat de Girona.
44
1 Visibility in Computer Graphics Toni Sellarès Unversitat de Girona
-
Upload
harriet-stafford -
Category
Documents
-
view
219 -
download
1
Transcript of 1 Visibility in Computer Graphics Toni Sellarès Unversitat de Girona.
1
Visibility in Computer Graphics
Toni SellarèsUnversitat de Girona

2
Visibility
Two points of a scene are mutually visible if the line segment connecting them is unoccluded.

3
Visibility
Visibility problems can be classified based on the problem domain

4
Visibility taxonomy (*)
1. visibility along a line
2. visibility from a point
3. visibility from a line segment
4. visibility from a polygon
5. visibility from a region
6. global visibility
(*) J. Bittner, P. Wonka, Visibility in Computer Graphics, Journal of Environment and Planning B: Planning and Design, vol. 30. no. 5, pp 729 – 725, 2003
5
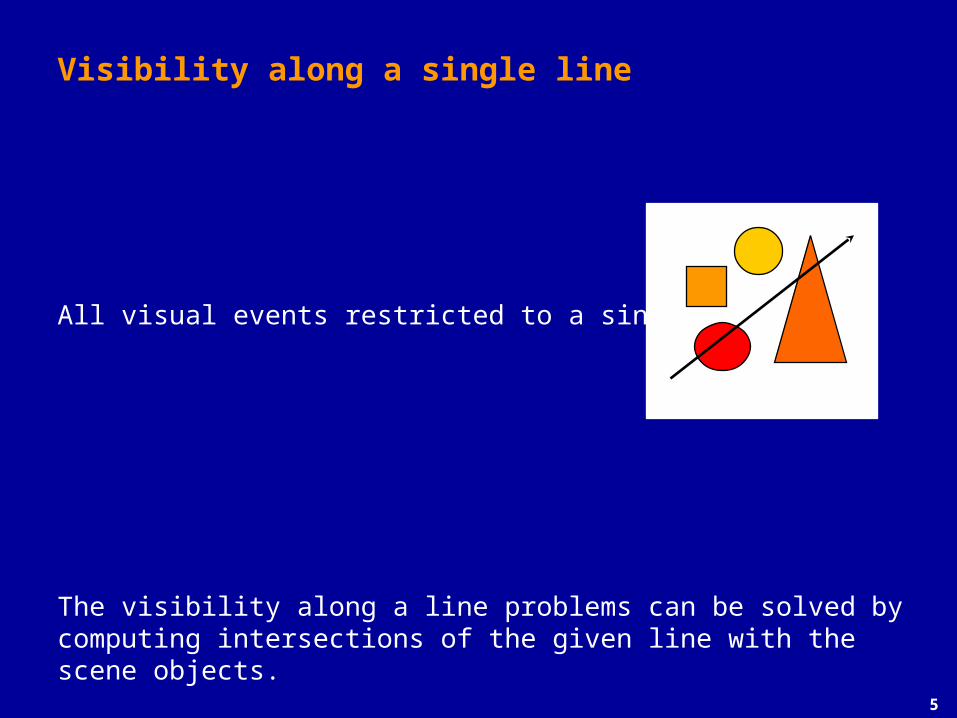
Visibility along a single line
All visual events restricted to a single line.
The visibility along a line problems can be solved by computing intersections of the given line with the scene objects.

6
Visibility along a single line
• Point-to-point visibility determines whether the line segment between two points is unoccluded, i.e. the line segment has no intersection with an object in the scene.
• Ray shooting: given a ray, determine the first intersection of the ray with a scene object.

7
Visibility from a point
Is the classical visible surface determination problem.
Due to its importance for image synthesis, visible surface determination (hidden-surface removal) covers the majority of existing visibilty algorithms in computer graphics.

8
Visibility from a region
Is a most general problem.
• Region-to-region visibility problem determines if the two given regions in the scene are mutually visible, invisible or partially visible.
• Other examples:
– potentially visible sets,
– aspect graph,
– 3D visibility complex

9
• When a 3-dimensional scene description is transformed to screen coordinates by a projection transformation, more than one object may overlap the same sample in the image.
• Some method is needed to determine which is the visible one,
so that pixels can be shaded appropriately.
Hidden-surface removal

10
Object-Space Methods
• Use geometric tests on the object descriptions to determine which objects overlap and where.
• Object space algorithms are O(n2) where n is the number of objects in the scene.
• Complexity of algorithms is high, few primitives are supported, and special effects often are difficult to implement
Examples: painter's algorithms, depth-sorting, BSP

11
Image-Space Methods
• Many approaches take advantage of the discretized nature of the output image, computing visibility only to the precision required to decide what is visible at a particular pixel.
• Image space algorithms are O(nN) where n is the number of objects in the scene and N is the number of pixels.
• Allow more advanced effects and complex models.
Examples: z-buffer, Watkin's, ray-casting

12
Why might a polygon (face) be invisible ?
– Polygon outside the field of view
– Polygon is backfacing
– Polygon is occluded by object(s) nearer the viewpoint
• We want to avoid spending work on polygons outside field of view or backfacing
• We need to know when polygons are occluded

13
Frustun culling
• Quickly reject what is not visible
• Conservative: never classify a visible scene element as invisible
• Reduce unecessary processing
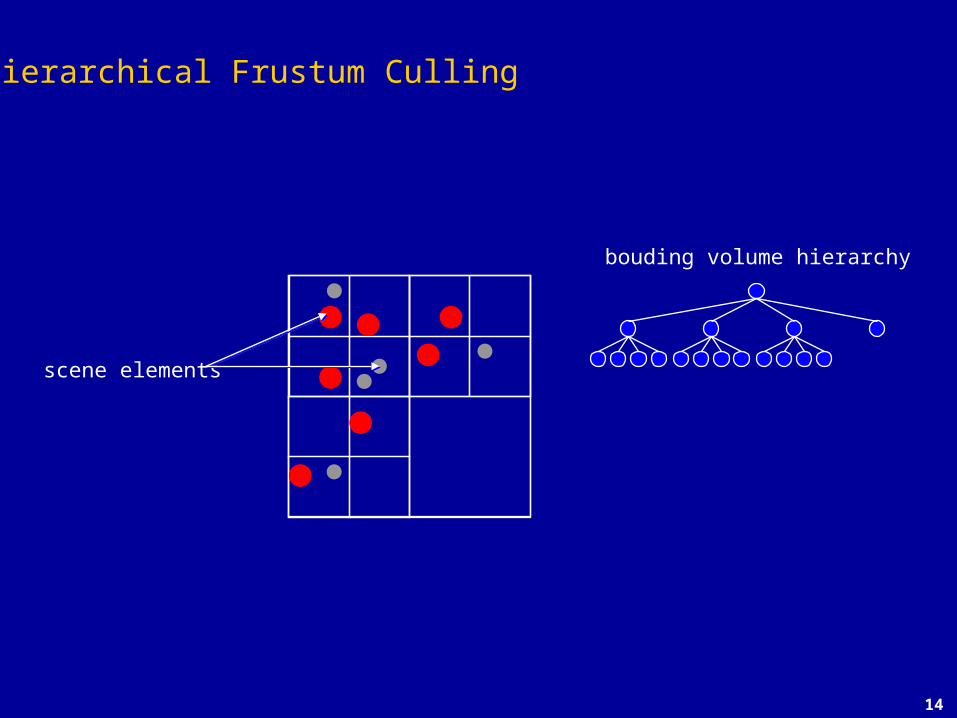
14
bouding volume hierarchy
scene elements
Hierarchical Frustum Culling
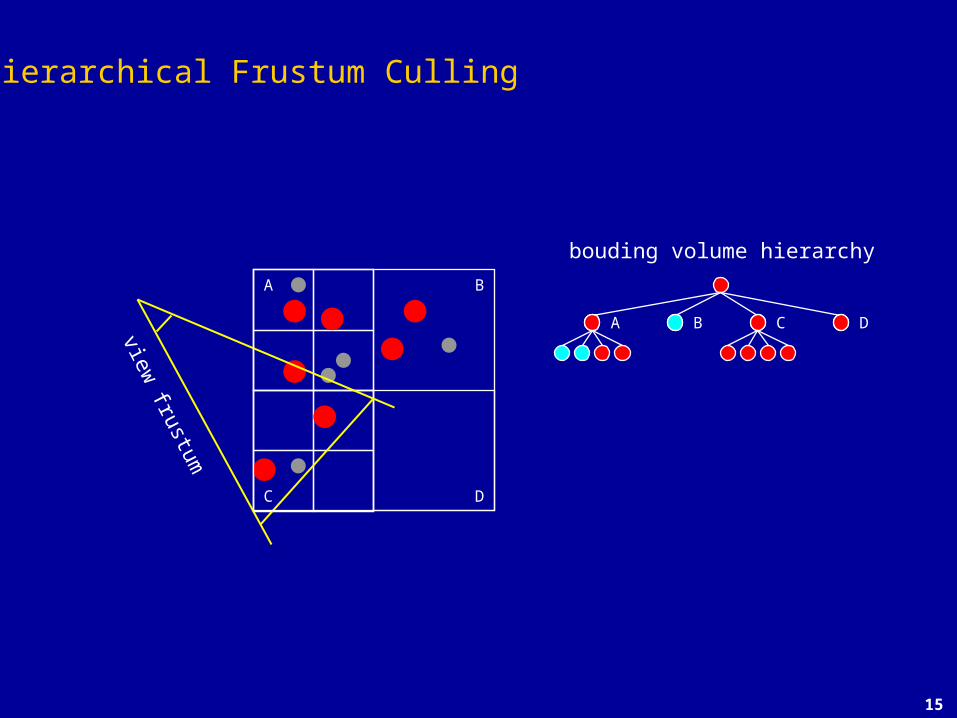
15
bouding volume hierarchy
view frustum
A B
DC
BA C D
Hierarchical Frustum Culling

16
Backface Removal (Backface Culling)
• Removes entire polygons that face away from the viewer
• If we are dealing with a single convex object, culling completely solves the hidden surface problem
Geometric test for the visibility
surface visible: 0NVVN
surface invisible : 0NV
silhouette : 0NV

17
Back-Face Culling
• On the surface of an object, polygons whose normals point away from the camera are always occluded:
Note: backface cullingalone doesn’t solve the
hidden-surface problem!

18
Back-Face Culling
• Not rendering backfacing polygons improves performance
• Reduces by about half the number of polygons to be considered for each pixel

19
Occlusion
• For most scenes, some polygons will overlap:
• To render the correct image, we need to determine which polygons occlude which

20
Conservative occlusion testing
• If the box representing a node is not visible then nothing in it is either• The faces of the box are projected onto the image plane and tested
for occlusion
occluder
hierarchicalrepresentation

21
Testing a Node for Occlusion
• If the box representing a node is not visible then nothing in it is either• The faces of the box are projected onto the image plane and tested for
occlusion
occluder
hierarchicalrepresentation

22
Occlusion Removal Algorithms
• Painter’s Algorithm Hybrid
• BSP tree Algorithm Hybrid
• Z-Buffer Algorithm Image-space
• Ray-Casting Algorithm Object-space

23
Painter's Algorithm
– Sort all polygons according to the (farthest) z coordinates of each,
– When the polygon's z extents overlap, resolve the sorting ambiguities by splitting the polygons
– Draw (fill) the polygons in the sorted order– back to front
• Also known as Depth-sort algorithm.
24
Painter's Algorithm
• Does polygon P obscures polygon Q?– Do the polygons' x extents overlap?– Do the polygons' y extents overlap?– Is P entirely on the opposite side of Q's plane from
the viewpoint?– Is Q entirely on the same side of P's plane from
the viewpoint?– Do the projections of the polygons onto screen not
overlap?

25
Painter’s Algorithm
Some cases in which Z extents of polygons overlap
Z
X X X
YY

26
Binary Space Partitioning Tree Algorithm
• Very efficient for a static group of 3D polygons as seen from an arbitrary viewpoint
• Correct order for Painter’s algorithm is determined by a suitable traversal of the binary tree of polygons: BSP Tree

27
BSP Tree
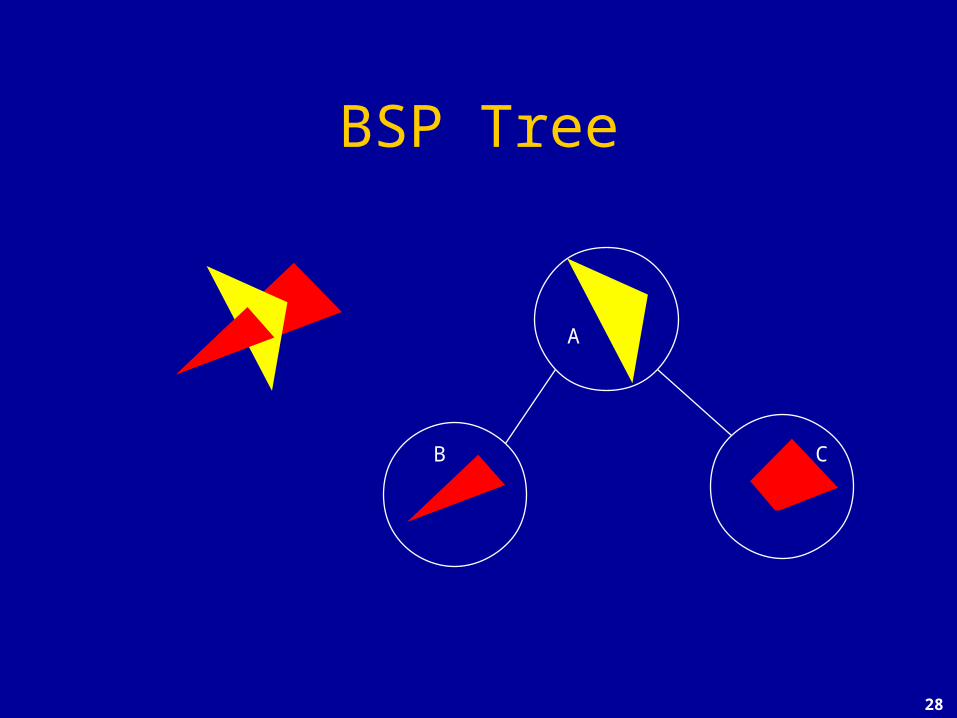
28
BSP Tree
A
B C

29
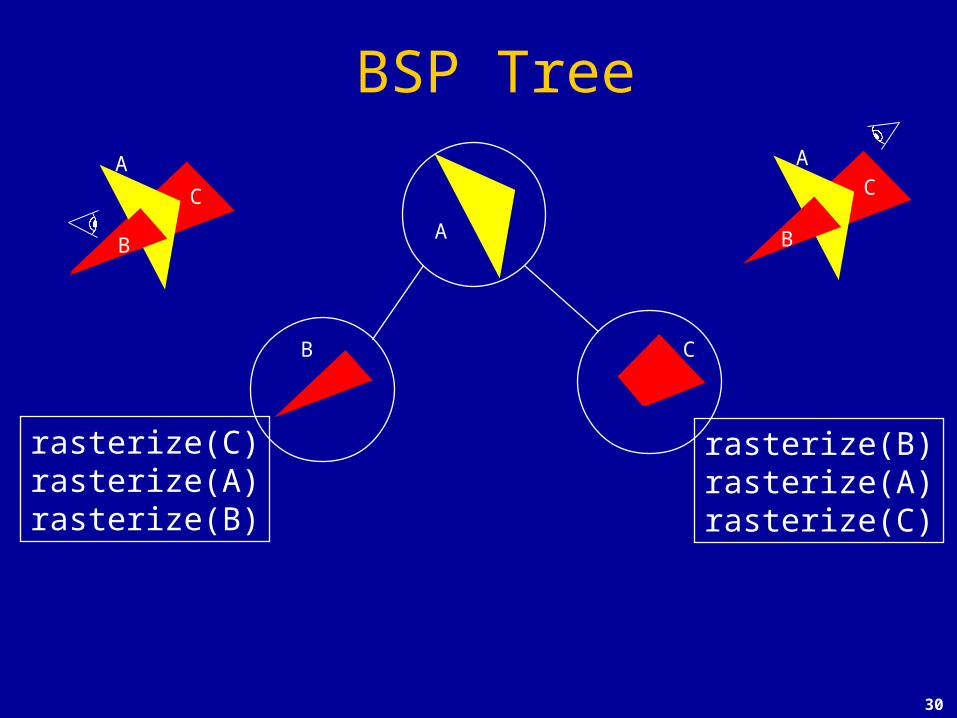
BSP Tree
tree.root
tree.left
Draw BSP Treefunction draw(bsptree tree, point eye)if tree.empty then
returnif ftree.root(eye) < 0
draw (tree.right)rasterize(tree.root)draw(tree.left)
else draw (tree.left)rasterize(tree.root)draw(tree.right)
tree.right
30
BSP Tree
A
B C
rasterize(C)rasterize(A)rasterize(B)
B
C
A
rasterize(B)rasterize(A)rasterize(C)
CA
B

31
BSP Tree
• Code works for any view
• Tree can be pre-computed
• Requires evaluation of
fplane of the triangle(eye)

32
BSP Tree Construction
• The binary tree is constructed using the following principle:– For each polygon, we can divide the set of other
polygons into two groups– One group contains those lying in front of the
plane of the given polygon– The other group contains those in the back– The polygons intersecting the plane of the given
polygon are split by that plane

33
Summary: BSP Trees
• Pros:– Simple, elegant scheme– Only writes to framebuffer (i.e., painters algorithm)
• Thus very popular for video games (but getting less so)
• Cons:– Computationally intense preprocess stage restricts
algorithm to static scenes– Worst-case time to construct tree: O(n3)– Splitting increases polygon count
• Again, O(n3) worst case

34
Z-Buffer Algorithm
• Color values are stored in a frame buffer.
• We also need a z-buffer, of the same size as the frame
buffer, to store z value of each image pixel.
Frame-Buffer
Z-Buffer

35
-far-far-far-far-far-far-far-far-far-far-far-far
fram
ebuf
fer
zbuf
fer
Z-Buffer Algorithm
• Key Observation: Each pixel displays color of only one polygon, ignores everything behind it.
• Don’t need to sort polygons, just find for each pixel the closest triangle.
• Z-buffer: one fixed or floating point value per pixel.

36
-far-.1-.2-.3-.4-.5-.6-.7-.8-far-far-far
fram
ebuf
fer
zbuf
fer
Z-Buffer Algorithm
• Key Observation: Each pixel displays color of only one polygon, ignores everything behind it.
• Don’t need to sort polygons, just find for each pixel the closest triangle.
• Z-buffer: one fixed or floating point value per pixel.

37
-far-.1-.2-.3-.4-.3-.1-.7-.8-far-far-far
fram
ebuf
fer
zbuf
fer
Z-Buffer Algorithm
• Key Observation: Each pixel displays color of only one polygon, ignores everything behind it.
• Don’t need to sort polygons, just find for each pixel the closest triangle.
• Z-buffer: one fixed or floating point value per pixel.

38
-far-.1-.2-.3-.4-.3-.1-.7-.8-far-far-far
fram
ebuf
fer
zbuf
fer
• Key Observation: Each pixel displays color of only one polygon, ignores everything behind it.
• Don’t need to sort polygons, just find for each pixel the closest triangle.
• Z-buffer: one fixed or floating point value per pixel.
Z-Buffer Algorithm

39
Z-Buffer Pseudo-code
For each rasterized fragment (x,y)
If z > zbuffer(x,y) then
framebuffer(x,y) = fragment color
zbuffer(x,y) = z

40
Ray CastingFind nearest surface along the view ray (ray shooting).
eye
for i = 0 to nRows-1 for j = 0 to nCols-1 ray = genRay(eye, pixel(i,j)) castRay(ray)
41
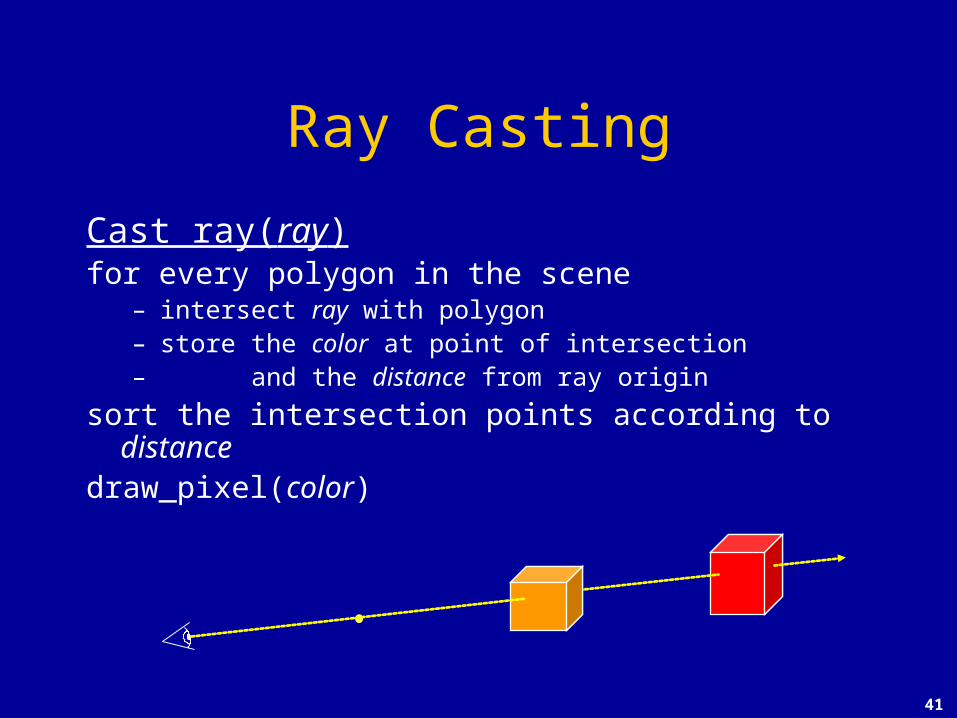
Cast ray(ray)for every polygon in the scene
– intersect ray with polygon– store the color at point of intersection– and the distance from ray origin
sort the intersection points according to distancedraw_pixel(color)
Ray Casting

42
Ray CastingFind nearest surface along the view ray (ray shooting).
eye
for i = 0 to nRows-1 for j = 0 to nCols-1 ray = genRay(eye, pixel(i,j)) castRay(ray)

43
Ray Casting
WW UU
VV
eye

44
Ray Casting
WW
UU
VV
eye