1 Planning with Loops Hector J. Levesque Dept. of Computer Science University of Toronto Presented...
33
1 Planning with Loops Hector J. Levesque Dept. of Computer Science University of Toronto Presented by Lihui Hu
-
date post
22-Dec-2015 -
Category
Documents
-
view
214 -
download
1
Transcript of 1 Planning with Loops Hector J. Levesque Dept. of Computer Science University of Toronto Presented...

1
Planning with Loops
Hector J. LevesqueDept. of Computer Science
University of TorontoPresented by Lihui Hu

2
1.Introduction
sequential planning conditional planning iterative planning

3
1.1 Difficulty of Iterative Planning
theorem-proving approach plans are programs, planning is
synthesis of programs with loops.Stephan and Biundo say “Plan generation on this level is an interactive process with non-trivial inferences that in our opinion, which is shared by other authors as well [citations omitted], cannot be carried out in a fully automatic way.”
4
1.2 Contribution
Separate the generation of plan from the verification
Generate small plans with loops
5
1.3 An example
Goals: chop down a tree; put away the axe
Actions: chop(pre:tree-up;axe-available ) store(pre:axe-available )

6
1.3.1 Plans -- Seuquential
No additional information Suppose we know the tree will go
down if it is hit 3 timessequential plan:
chop; chop ; chop ; store

7
1.3.1 Plans – Conditional the tree will go down if it is hit at
most 2 timesconditional plan:CASE look OF
-down: store-up: chop ;
CASE look OF-down: store-up: chop ; store
ENDCENDC
8
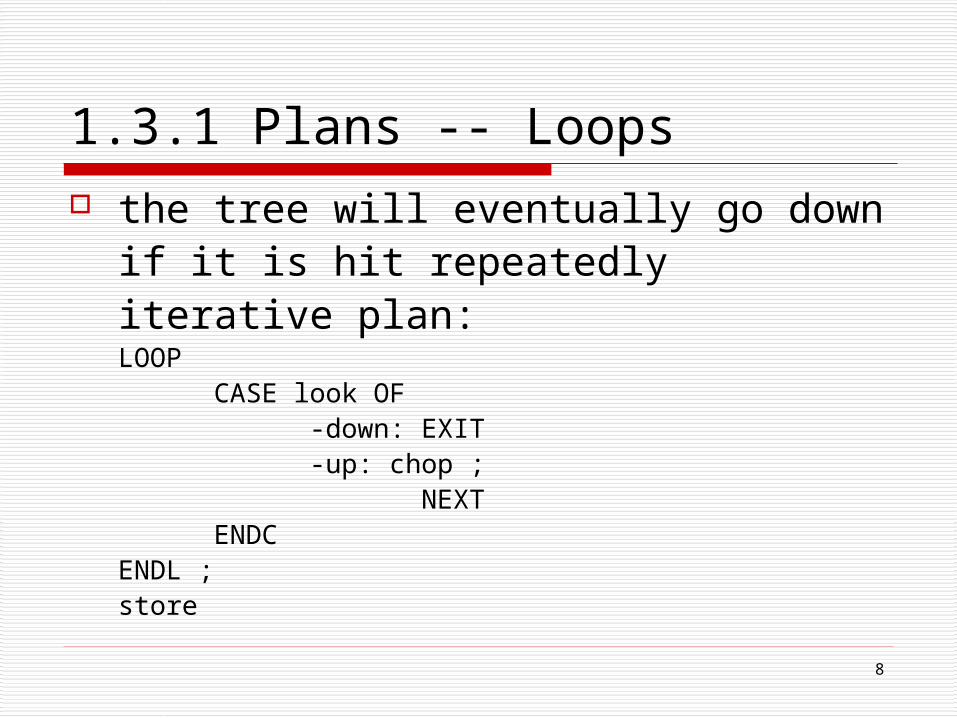
1.3.1 Plans -- Loops the tree will eventually go down
if it is hit repeatedlyiterative plan:LOOP
CASE look OF-down: EXIT-up: chop ; NEXT
ENDCENDL ;store

9
1.4 Robot Programs nil seq(A; P) A: primitive action; P: robot program case(A; [if(R1; P1); : : : ; if(Rk; Pk)]) if P and Q are robot programs, and B is the result of
replacing in P some of the occurrences of nil by exit andthe rest by next; then loop(B;Q) is a robot program,executed by repeatedly executing the body B until theexecution terminates with exit (rather than next), andthen going on by executing the continuation Q.
Planning: given a goal, find a robot program that can achieve it.

10
1.5.1 The Planning Approach
planning parameter(1) its value is not known or even bounded at plan time, and(2) no loops would be required to achieve the goal if its value were known.

11
1.5.2 The Planning Approach -- Continue F is a planning parameter The user will provide a constant N1 (called
the generating bound) and we generate a plan (possibly containing some number of loops) that is provably correct under the assumption that F ≤ N1;
The user will provide a second larger constant N2 (called the testing bound) and we test that the plan generated in the first step is also provably correct under the assumption that F ≤ N2:

12
2.1 The Planner
problem specification parameter F, N1 and N2 we generate a plan that is correct for
F ≤ N1 we test the plan to see if it is correct
for F ≤ N2 KPLANNER, is written in Prolog http://www.cs.toronto.edu/cogrobo

13
2.2 Testing Plans
A plan P achieves a goal G starting in history H if
14
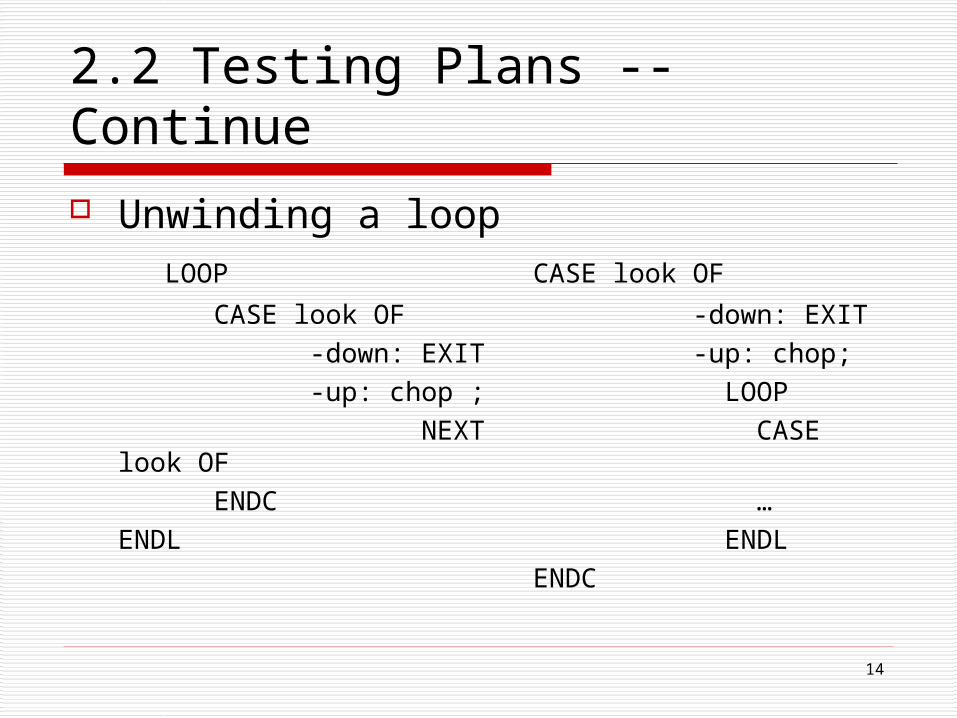
2.2 Testing Plans -- Continue
Unwinding a loop LOOP CASE look OF
CASE look OF -down: EXIT-down: EXIT -up: chop;-up: chop ; LOOP NEXT CASE look
OFENDC …
ENDL ENDL ENDC

15
2.3 Generating Plans

16
2.3 Generating Plans -- Continue

17
2.4 Generating loops
F ≤ 1

18
3 Planner in Action prim_fluent(f) prim_action(a; [r1; : : : ; rn]) poss(a; c) init(f; v) causes(a; r; f; v; c) settles(a; r; f; v; c) rejects(a; r; f; v; c) parm_fluent(f) init_parm(w; f; v)

19
3.1 Tree Chopping Example

20
3.1 Tree Chopping Example -- Continue

21
3.1 Tree Chopping Example -- Continue
KPLANNER finds tree-chopping plan with loop in .11 seconds.
22
3.2 Counting Example We have two accumulators and some
unknown integer input k; where k > 0. The primitive actions are:
incr_acc(n); increment accumulator n (both start at 0); test_acc(1); sense if the first accumulator has the same value as the input. The goal: To make the second accumulator have the value 2k-1.
23
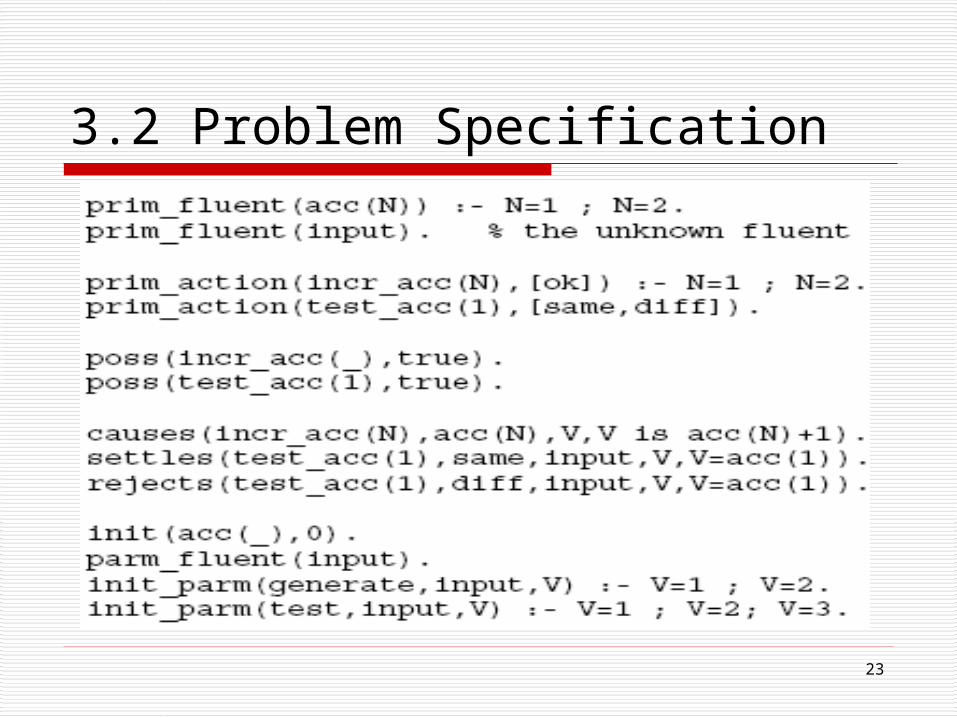
3.2 Problem Specification

24
3.2 The Plan

25
3.3 Another Example
Searching an unbounded binary tree for a target node
A plan is found after 0.07 seconds.
26
4.1 Discussion
As far as we know, no planner based on fully automated theorem-proving can generate the three plans.
27
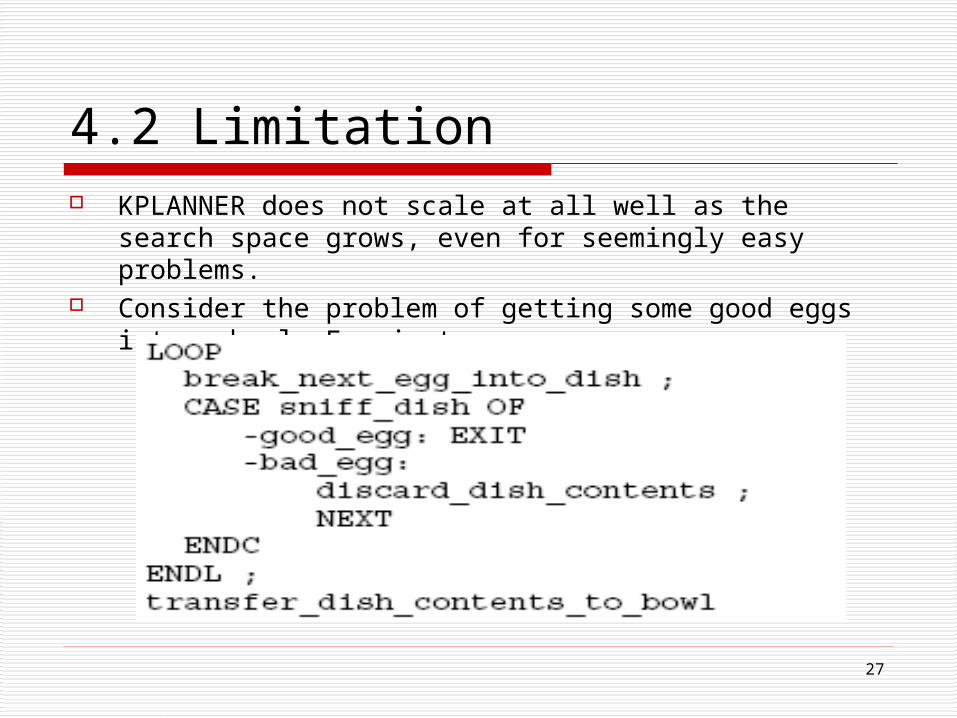
4.2 Limitation KPLANNER does not scale at all well as the search space
grows, even for seemingly easy problems. Consider the problem of getting some good eggs into a
bowl .For just one egg:
28
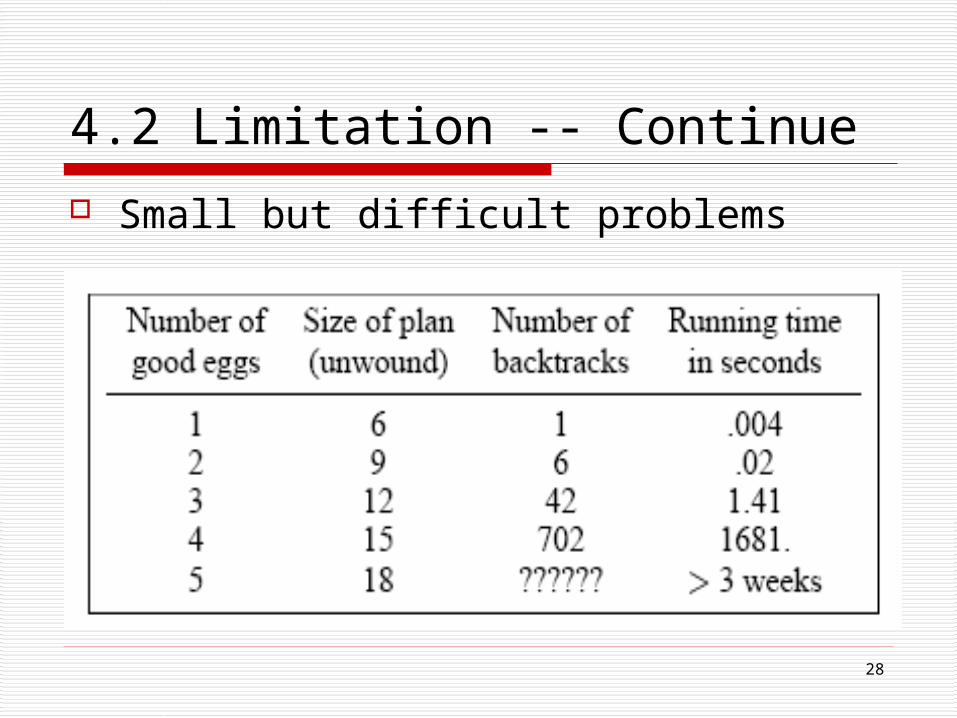
4.2 Limitation -- Continue
Small but difficult problems
29
5.1 Towards a Theory
W(k; σ) stands for the proposition that if we start in any initial state where F = k; we perform the action sequence σ; we end up in a goal state.

30
5.1 Towards a Theory-- Continue
Define of simple problem

31
5.3 Theory
Theorem 1 Suppose we have a planning problem that is simple with respect to action A; and a robot program P that contains N occurrences of A. If P is a correct plan for all values of F ≤ N + 2, then P is correct for all values of F.

32
5.3 Theory -- Continue
Suggest a variant of KPlanner Compute a testing bound Apply to simple planning problems
only

33
6. Conclusion new way of generating a plan with loops
that is not tied to proving a theorem about its correctness.
The method involves generating a plan that is correct for a given bound, determining if the plan is the unwinding of a plan with loops, and testing if another unwinding of the plan with loops would also be correct for a larger bound.
A theorem showing that this method of planning is correct for a certain class of simple planning problems.