






Languages
Pages
Legal


NMT EE 589 & UNM ME 482/582
ROBOT ENGINEERING
Dr. Stephen BruderNMT EE 589 & UNM ME 482/582

Dr. Stephen Bruder
1. The CRS A255 Robot An In Class Example
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Consider the CRS A255 Robot (brochure)○ A 5 DOF “RRRRR” Anthropomorphic Robotic Arm
Slide 2 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Step 1: Identify the Joint Axes
Axis
#1
Axis #2
Axis #3
Axis #4Axis #5
Slide 3 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Step 2: Assign link origns
Axis
#1
Axis #2
Axis #3
Axis #4Axis #5
origin of frame{1}
origin of frame{2}
origin of frame{3}
origin of frames {4 & 5}
Slide 4 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Step 3: Assign z-axes
Axis
#1
Axis #2
Axis #3
Axis #4Axis #5z1
z2
z3
z4z5
Slide 5 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Step 4: Assign x-axes
Axis
#1
Axis #2
Axis #3
Axis #4Axis #5z1
z2
z3
z4z5
x1
x2
x3 x4,5
Slide 6 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Step 6: Add a base/Tool Frame
Axis
#1
Axis #2
Axis #3
Axis #4Axis #5z1
z2
z3
z4 z5
x1
x2
x3 x4,5
z0
x0
Slide 7 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
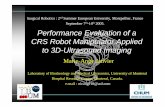
Build DH Table
D-H
params. i
1
2
3
4
5
i - 1 i-1a id i
z1
z2
z3
z4 z5
x1
x2
x3 x4,5
z0
x0
1d
0 0 1d ( )t190 0 0 ( ) 90t 2
0 2a 03( ) 90t
0 3a 0 ( ) 90t 4
90 0 0 ( )t5
2a
3a
From measurements:• d1=10 in• a2=10 in• a3=10 in
Slide 8 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
A quick visual check of the D-H table via Robotics TB
z1
z2
z3
z4 z5
x1
x2
x3 x4,5
z0
x0
Slide 9 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Real World vs Model
1 1RW 2 2 90RW
3 2 3RW 4 2 3 4RW
Slide 10 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Real World vs Model○ Config#2
Slide 11 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Real World vs Model○ Config#3
Slide 12 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Forward Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Build the T-matrices1 1
1 11
1
0
0 0
0 0
0 0 1
0 0 0 1
c s
s cT
d
2
12
2
2 2
0 0
0 0 1 0
0 0
0 0 0 1
s c
c sT
3 3
3
2
3 32
0
0 0
0 0 1 0
0 0 0 1
cT
s c a
s
4 4 3
4 434
0
0 0
0 0 1 0
0 0 0 1
c
sT
s a
c
5 5
5 5
45
0 0
0 0 1 0
0 0
0 0 0 1
c s
s cT
1 2 1 2 1
1 2 2 1 102
2 2 1
0
0
0
0 0 0 1
c s c c s
s s c s cT
c s d
1 23 1 23 1 2 1 2
23 1 1 23 1 2 1 203
23 23 2 2 10
0 0 0 1
c c c s s a c s
c s s s c a s sT
s c a c d
1 234 1 234 1 1 3 23 2 2
0 1 234 234 1 1 1 3 23 2 24
234 234 2 2 1 3 230
0 0 0 1
c s c c s c a c a s
s s c s c s a c a sT
c s a c d a s
1 5 1 5 234 5 1 1 5 234 1 234 1 3 23 2 2
0 1 5 5 1 234 1 5 1 5 234 234 1 1 3 23 2 25
5 234 234 5 234 2 2 1 3 23
0 0 0 1
s s c c s c s c s s c c c a c a s
c s c s s c c s s s c s s a c a sT
c c c s s a c d a s
Slide 13 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Inverse Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
A 6 DOF World and a 5 DOF Robot?○ Looking at the A255 robot it seems reasonable to solve for
the 3D position, inclination of z5 to the x/y plane, and rotation about axis#5 (screwdriver type applications).
○ Considering the positional equations
11 12 131 5 1 5 234 5 1 1 5 234 1 234 1 3 23 2 2
21 22 230 1 5 5 1 234 1 5 1 5 234 234 1 1 3 23 2 25
31 32 335 234 234 5 234 2 2 1 3 23
=
0 0 0 10 0 0 1
x
yd
z
r r r ps s c c s c s c s s c c c a c a s
r r r pc s c s s c c s s s c s s a c a sT T
r r r pc c c s s a c d a s
1 3 23 2 2 (1.1)xc a c a s p
1 3 23 2 2 (1.2)ys a c a s p
2 2 1 3 23 (1.3)za c d a s p
Slide 14 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Inverse Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
From (1.1) and (1.2) we get
Hence,
3 23 2 211
3 23 2 2
y
x
p a c a sTan
p a c a s
11 1 (1.4)180y
x
pTan and
p
Slide 15 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot
{0}
5 234 5 234 234 3 23 2 2 1 11 21 1 1 12 22 1 1 13 23 1 1 1
5 5 1 21 11 1 1 22 12 1 1 23 13 1 1 1
5 234 234 5 234 2 2 3 23 31 32 33 1
0 0
0 0 0 1 0 0 0 1
x y
y x
z
c s s s c a c a s c r r s c r r s c r r s c p p s
s c c r r s c r r s c r r s c p p s
c c c s s a c a s r r r d p
Inverse Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Looking at the length of {1} to {5}○ This should only be a fn of 3
1 15 0 = dT TT
2 2 2 2 2 22 3 2 3 3 1 12 2x y z za s a a a d p p d p p
2 2 2 2 2 21 1 2 3
32 3
2
2x y z zd p p d p p a a
sa a
{1}{2}
{3}{4}
{5}15ORGd
13 32
(1.5181
0 )aT dan n
Slide 16 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Inverse Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Adding Eqn. (1.2) Cos(2) to Eqn. (1.3) Sin(2)
This is case 7, hence
2 3 23 2 2 2 2 2 3 23 2 1 2 1x zc a c a s s a c a s c p c s p d
3 3 2 1 2 1x za c c p c s p d
2 2 1 1 3 3, ,x zb c where a bac s p c p d c a cand
2 2 21 1
2 (1.6)b a b c
Tan Tana c
Slide 17 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Inverse Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Finally, inclination of z5 to the x/y plane
And, 5 is given
i i
The X0/Y0 plane
5z
5 0
0
234
5 3,3
ˆ ˆiSin z z
s
R
4 2 3 (1.7)i
Slide 18 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Motion Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Build the Jacobian Matrix○ Let’s use the indirect method to build Jv
1 3 23 2 20
5 1 3 23 2 2
2 2 1 3 23
ORG
c a c a s
d s a c a s
a c d a s
1
1
1 3 23 2 205
1 3 23 2 2
0v
s a c a sd
c a c a sJ
2
2
1 2 2 3 2305
1 2 2 3 23
3 23 2 2
v
c a c a sd
s a c a s
a c a s
J
3
3 1 2305
3 1 23
3 23
3
v
a c sd
a
a
J s s
c
4
0
4
5
0
0
0v
dJ
5
0
5
5
0
0
0v
dJ
1 3 23 2 2 1 2 2 3 23 3 1 23
1 3 23 2 2 1 2 2 3 23 3 1 23
3 23 2 2 3 23
0 0
0 0
0 0 0v
s a c a s c a c a s a c s
c a c a s s a c a s a s s
a c a s c
J
a
Slide 19 / 20

Dr. Stephen Bruder
1. The CRS A255 Robot Motion Kinematics
Thursday 4th Oct 2012ME 482/582: Robotics Engineering
Build the Jacobian Matrix○ Let’s use the direct method to build J
Hence,
1
01
0ˆ 0
1
J z
2
10
2 1ˆ
0
s
z cJ
3
10
3 1ˆ
0
s
z cJ
4
10
4 1ˆ
0
s
z cJ
5
1 2340
5 234 1
234
ˆc c
z c s
s
J
1 1 1 1 234
1 1 1 234 1
234
0
0
1 0 0 0
s s s c c
c c c c sJ
s
1 3 23 2 2 1 2 2 3 23 3 1 23
1 3 23 2 2 1 2 2 3 23 3 1 23
3 23 2 2 3 23
1 1 1 1 234
1 1 1 234 1
234
0 0
0 0
0 0 0
0
0
1 0 0 0
v
s a c a s c a c a s a c s
c a c a s s a c a s a s s
a c a s a c
s s s c c
c c c c
J
s
JJ
s
Slide 20 / 20
Top Related