







Languages
Pages
Legal


8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 1/16
t P . r g m o n
Int. J. Mach . Tools Manufact. Vo l. 36, No. 6, pp. 71 3-728, 1996Copyright © 1996 Elsevier Science Ltd
Printed in G reat Britain. All righ ts reserved0890-6955/96515.00 + .00
0 8 9 0 - 6 9 5 5 ( 9 5 ) 0 0 0 5 5 - 0
T H E R E G U L A T I O N O F P O S I T I O N E R R O R I N C O N T O U R I N G
S Y S T E M S
R . J . S E E T H A L E R t a n d I . Y E L L O W L E Y t
(Received 15 July 1994; in final form 3 M ay 1995)
A b 6 t r a e t - - T h e a u l L h o r s d i s c u s s t h e u s e o f a n o v e l h a r d w a r e c o n f i g u r a t i o n i n t h e c o n t r o l o f p o s i t i o n e r r o r
d u r i n g c o n t o u r i n g o p e r a t i o n s . T h e a r c h i t e c t u r e d e s c r i b e d a l l o w s r e a l t i m e e r r o r c o n t r o l i n m u l t i p l e a x i s
systems; t h i s i s a c h ie v e d b y a l lo w in g a n y a x i s w i th a p h a s e l a g w h ic h e x c e e d s th a t s p e c i f i e d , t o s lo w d o w n
t h e e n t i r e s y s t e m u n t i l i t i s i n c o n f o r m a n c e . T h e p e r f o r m a n c e o f t h e s y s t e m i s d e m o n s t r a t e d b y b o t h
s i m u l a t i o n a n d e x p e r i m e n t , u s i n g c o r n e r i n g a n d c i r c u l a r i n t e r p o l a t i o n a s e x a m p l e s . T h e m a j o r c o n t r i b u t i o no f t h e w o r k i s t h o u g h t t o b e t h e a b i l it y o f th e s y s t e m t o c o p e , i n r e a l t im e , w i t h s y st e m c o n s t r a i n t s a n dn o n l in e a r i t i e s . C o p y r ig h t (~ ) 1 9 9 6 E l s e v ie r S c ie n c e L td
1 . I N T R O D U C T I O N
I n t h e l a s t d e c a d e c o n s i d e r a b l e e f f o r t h a s b e e n d e v o t e d t o t h e d e s i g n o f h i g h s p e e d
c o n t o u r i n g a l g o r i t h m s . T h e s i m u l t a n e o u s d e v e l o p m e n t o f f a s t e r c o m p u t e r h a r d w a r e ,
has a l so h ad a s i gn i fi can t i m pac t on t h e f ea s i b l e leve l o f com p l ex i t y i n con t ro l s t r a t eg i e s
a n d t h e b a n d w i d t h o f t h e m e a s u r i n g s u b s y s t e m s .
T h e p r o b l e m o f r e d u c i n g p a t h e r r o r o r i n d iv i d u a l a x is e r r o r s m a y b e a c h i e v e d th r o u g h
p a t h p r e p r o ce , ;s i n g , in w h i c h a d y n a m i c m o d e l o f t h e m a c h i n e s y s t e m is u t il is e d i n t h e
p a t h p l a n n i n g p r o c e s s ( P a k [ 1 ], h a s g i v en a r e c e n t m a c h i n e t o o l r e l a te d e x a m p l e ) . T h e
p a p e r w h i c h f o ll o w s is , h o w e v e r , c o n c e r n e d w i t h th e r e a l ti m e c o n t r o l o f e r r o r , w h i c hf r o m a v i e w p o i n t o f p r a c t ic e , i s p e r h a p s a m o r e r e c e n t a c t iv i ty . S e v e r a l o t h e r a u t h o r s
h a v e e x a m i n e d t hi s a r e a , n o t a b l y T o m i z u k a , [ 2 , 3 ] , w h o h a s a t t e m p t e d t o m i n i m i s e
p a t h e r r o r t h r o u g h t h e a c h i e v e m e n t o f a s c l o se a s p o s s ib l e to z e r o p h a s e l ag b e t w e e n
t h e c o m m a n d a n d a c t u a l p o s i t i o n o f e a c h a x i s . T h e e s s e n c e o f t h e w o r k d e s c r i b e d b y
T o m i z u k a i s t h e u s e o f a c o m p e n s a t i n g f i l t e r w h i c h a t t e m p t s t o c a n c e l t h e d y n a m i c s
o f t h e c o n t r o l lo o p ; i t s h o u l d b e e v i d e n t t h a t t h is t y p e o f a p p r o a c h p r e s u p p o s e s a g o o d
k n o w l e d g e o f p l a n t s t ru c t u r e a n d p a r a m e t e r s . A d d i t i o n a l p r o b l e m s a r e l ik e l y w i t h a n y
such sys t em due t o phys i ca l cons t r a i n t s and non l i nea r i t i e s ; i n t he ca se o f t he p rev i ous
w o r k , t h e a u t h o r s h a v e s u g g e s t e d w a y s t o a v o i d l a r g e a c c e l e r a t i o n s a n d i n d e e d l a t e r
w o r k b y W e c k [ 4 ] h a s p r o p o s e d a s o l u t i o n t o t h i s p r o b l e m w h i c h i n v o l v e s p l a c i n g a
l ow pass f i l t e r i n f ron t o f t he con t ro l l e r . T he so l u t i on p roposed by Weck a l l ev i a t e s t he
a m p l i f i e r s a t u r a t i o n p r o b l e m a n d i n p r a c t i c e , h a s b e e n s h o w n t o l e a d t o a n i m p r o v e d
p e r f o r m a n c e i n c o r n e r t r a c k i n g .
A r a t h e r d i f f e r e n t a p p r o a c h t o t h e m i n i m i s a t io n o f p a t h e r r o r h a s b e e n i n t r o d u c e d
by K ore n [ 5 , 6 ] , w ho se t s ou t t o m i n i m i se pa t h e r ro r , w h i l e stil l a l low i ng ac t ua l
i nd i v i dua l ax i, ; pos i t i on e r ro r s . T he app roac h r eq u i r e s t he ca l cu l a t ion o f a pa t h e r ro r
f r o m t h e i n d iv i d u a l e r ro r s o f t h e i n d iv i d u a l a x e s . I t t h e n u s e s t h is p a t h e r r o r t o
c o m p e n s a t e t h e i n d i v i d u a l a x e s . T h e s t r a t e g y s u g g e s t e d b y K o r e n r e q u i r e s v e r y f a s t
ha rdw are t o a l l ow t h i s p rocedu re o f c ro s s coup l i ng e r ro r s t o be ach i eved i n a r ea l i s t i c
f a sh i on .
T he app roach t aken i n t h i s pape r i s i n t ended t o a l l ow t he poss i b i l i t y o f con t ro l l i ng
e r ro r i n r ea l t i m e , even i n t hose ca se s w he re cons t r a i n t s such a s am p l i f i e r s a t u ra t i on
a r e e n c o u n t e r e d . T h e a p p r o a c h d e r i v e s m u c h f r o m t h e a r c h it e c tu r e o f a c o n t ro l s y s te m
t D e p a r t m e n t o f M e c h a n i c a l E n g i n e e r i ng , U n i v e r s it y o f B r i t i sh C o l u m b i a , V a n c o u v e r , C a n a d a V 6 T 1 W 5 .
713

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 2/16
714 R .J . Seethaler and I. Yellowley
a rch i t ec t u re deve l o ped a t t he Un i ve r s i t y o f B r it i sh C o l um bi a [ 7 ] . A b r i e f de sc r i p t i on
o f t he a r ch i t ec t u re i s g i ven i n t he fo l l ow i ng sec t i on .
2. UBC CONTRO LLER
T h e c o n t r o l l e r ut il is e s e i th e r t h e 8 b it S T D o r 3 2 b i t S T D 3 2 B u s. T h e m a s t e r
p roce s so r i s an I N T E L 80X86 . In t yp i ca l c a se s up t o 15 ax is sl ave con t ro l l e r s m a y bei n s t a ll ed . T h e so f t w a re sy s t em i nc l udes a t w o s t age i n t e rpo l a t i on sy s t em and , i n t he
w o r k d e s c r i b e d i n t h i s p a p e r , t h e m a s t e r u p d a t e s t h e p o s i t i o n o f e a c h s l a v e e v e r y
1 6 m s e c ( th i s c o r r e s p o n d s t o a p p r o x i m a t e l y f o u r t i m e s t h e v e l o c it y l o o p t i m e c o n s t a n t
o f t h e a x i s se r v o s ) . T h e s la v e p ro c e s s o r s a r e u s u a l ly b a s e d u p o n I N T E L 8 0C 1 96
m i c rocon t ro l l e r s ; t he se i m p l em en t l oop c l o s i ng , a d i g i t a l l e ad l ag f i l t e r and a s econd
s t a g e i n t e r p o l a ti o n p r o c e s s . T h e c o n t r o ll e r s i n t e r p o l a te 3 2 t i m e s b e t w e e n e v e r y m a s t e r
pos i t i on , t he l oo p is c l o sed a t the s a m e t i m e l ead i ng t o a s e rvo upd a t e r a t e , i n t h i s
ca se , o f 0 . 5 m sec . T he f i r s t and second s t age i n t e rpo l a t i on f r eq uenc i e s a r e i m por t an t
p a r a m e t e r s i n c o n t r o l l i n g t h e p a t h e r r o r .
T h e a r c h i t e c t u r e , w h i c h is s h o w n i n F i g . 1 , e n s u r e s t h a t m o s t o f t h e w o r k l o a d is
t a k e n f r o m t h e m a s t e r a n d t r a n s f e r r e d o t h e s la v e c o n t r o ll e r s a n d t h a t t h e r e q u i r e db a n d w i d t h o f t h e b u s i s r e d u c e d f o r a n y f i x ed n u m b e r o f s la v e s a n d s e r v o u p d a t e t i m e .
T h e m a j o r a d d i t io n a l f e a t u r e o f t h e a r c h i t e c t u r e is t h e a d d i t i o n o f p a r a ll e li s m t h r o u g h
t he u se o f so -ca l l ed s t a t e l i ne s t o connec t t he ax i s s l aves and t he p roces s / t echno l ogy
s l a v e s . E a c h o f t h e s t a t e l i n e s r e p r e s e n t s a n A N D I N G o f t h e c o n d i t i o n o f a l l b o a r d s
w h i c h w r i t e t o i t , t h e y a r e u s u a l ly a c h i e v e d , p h y s ic a ll y t h r o u g h t h e u s e o f o p e n c o l l e c to r
l i n e s . T h e n o r m a l m o d e o f u s e o f t h e l i n e i s t o h a v e e a c h b o a r d w r i t e a n d r e a d f r o m
t he l i ne s a t t he end and s t a r t , r e spec t i ve l y , o f t he s econd s t age i n t e rpo l a t i on cyc l e .
T he r e su l t i n t he s i m p l e s t c a se o f a s i ng l e s t a t e l i ne w h i ch i s u sed i n t h i s app l i ca t i on
i s one o f t he fo l l ow i ng :
( a ) S h o u l d t h e l i n e b e h i g h t h e i n t e r p o l a t i o n a n d c o n t r o l f u n c t i o n s g o a h e a d a s
n o r m a l .
( b ) S h o u l d t h e l i n e b e l o w , t h e p a s t i n t e r p o l a t i o n s t e p i s r e p e a t e d , i . e . n o f u r t h e r
p o s i t i o n i s a d d e d t o t h e p o s i t i o n c o m m a n d ; t h e l o o p i s h o w e v e r c l o s e d n o r m a l l y .
O n e m a y s e e t h e n t h a t t h e e f f e c ti v e c o m m a n d v e l oc it y m a y b e r e d u c e d t h r o u g h t h e
use o f t he s i ng l e s t a t e l i ne , and t ha t any o f t he s l aves , e i t he r ax i s s l aves o r p roces s
s la v e s, m a y a c h i e v e t hi s e n d , t h e f i n al v e lo c i ty a c h i e v e d t h e n b e i n g d e t e r m i n e d b y t h e
t i gh t e s t o f t he cons t r a i n t s . A p rev i ous pap e r , R e f , [ 8 ] , ha s exa m i ned t he u se o f th i s
m e c h a n i s m i n f o r c e c o n t r o l .
2.1. Basic interpolation system
T he pos i t i on i nc rem en t s ca l cu l a t ed by t he f i r s t s t age i n t e rpo l a t i on sy s t em w h i ch runs
o n t h e m a s t e r , a r e t r a n s f e r r e d o v e r th e b a c k p l a n e ( S T D o r S T D 3 2 ) t o b u f f e r s i n b i p o r t
Master
CPU
80x86
STD BUS
Slave
CPU
Axis I
S l a v e
CPU
Axis 2
Coordinating line
State line
F r o n t p la n e B u s
Fig. 1. UBC controller architecture.
Slave
CPU
Axis 3
Fw
r
8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 3/16
Regu lation of Position Err or in Conto uring Systems 715
r a m o n e a c h o f t h e a x is s la v e s. T h e s l a v e p ro c e s s o r s t h e m s e l v e s t h e n p e r f o r m a s e c o n d
s t a g e i n t e r p o l a t i o n o r s p l i n i n g o f p o s i t i o n . T h e a i m o f t h e s y s t e m i s t o a l l o w a h i g h
a c c u r ac y o f f it ti n g t h e c o m m a n d e d p a t h w i t h o u t r e q u i r i n g e i t h e r a l a rg e c o m p u t a t i o n a l
e f f o r t a t t h e m a s t e r o r a h i g h b a n d w i d t h i n t h e c o m m u n i c a t i o n s y s te m . T h e p a r t i c u l a r
i n t e r p o l a t i o n s c h e m e w h i c h i s u s e d i s p a r a b o l i c i n n a t u r e a n d w a s c h o s e n t o m i n i m i s e
c o m p u t a t i o n [ 9 ] . T h e s c h e m e a s s u m e s t h a t p o i n t s a r e e v e n l y s p a c e d i n t i m e , a n d t h a tt h e r e i s a l i n e a r v a r i a t i o n i n v e lo c i t y o v e r e a c h m a s t e r s a m p l in g p e r io d . T h i s l e a d s t o
t h e f o l lo w i n g f o r m u l a f o r d i s p l a c e m e n t
x = X i + [ X i + l - x i ] t [ Xi +2 - X i ~ A ~ - X i q - X i - 1 ] ( ~ - - - 2 a t t) (1)
w h e r e 0 -< t -'-: A t, x i s t h e c o m m a n d e d d i s p l a c e m e n t a t t im e t , X i i s t h e c u r r e n t f i r s t
s t a g e i n c r e m e n t .
T h e p o s i t i o n s p l i n e o f e q u a t i o n ( 1 ) s t il l a l l ow s t h e p o s s ib i li t y o f l a r g e d i s c o n t i n u i t i e s
in v e lo c i t y a t t h e e n d p o in t s o f t h e f i r s t s t a g e i n t e r p o l a t i o n . T h i s w i l l r e s u l t i n t h e
c o m m a n d i n g o f la r g e a n d p e r h a p s i n fe a s ib l e a c c e le r a ti o n s . T h i s p r o b l e m w i ll b e
a d d r e s s e d i n a f o l l o w in g s e c t i o n w h ic h d i s c u s s e s t h e s o - c a l l e d v e lo c i t y s p l i n e .
2 .2 . S e r v o l o o p
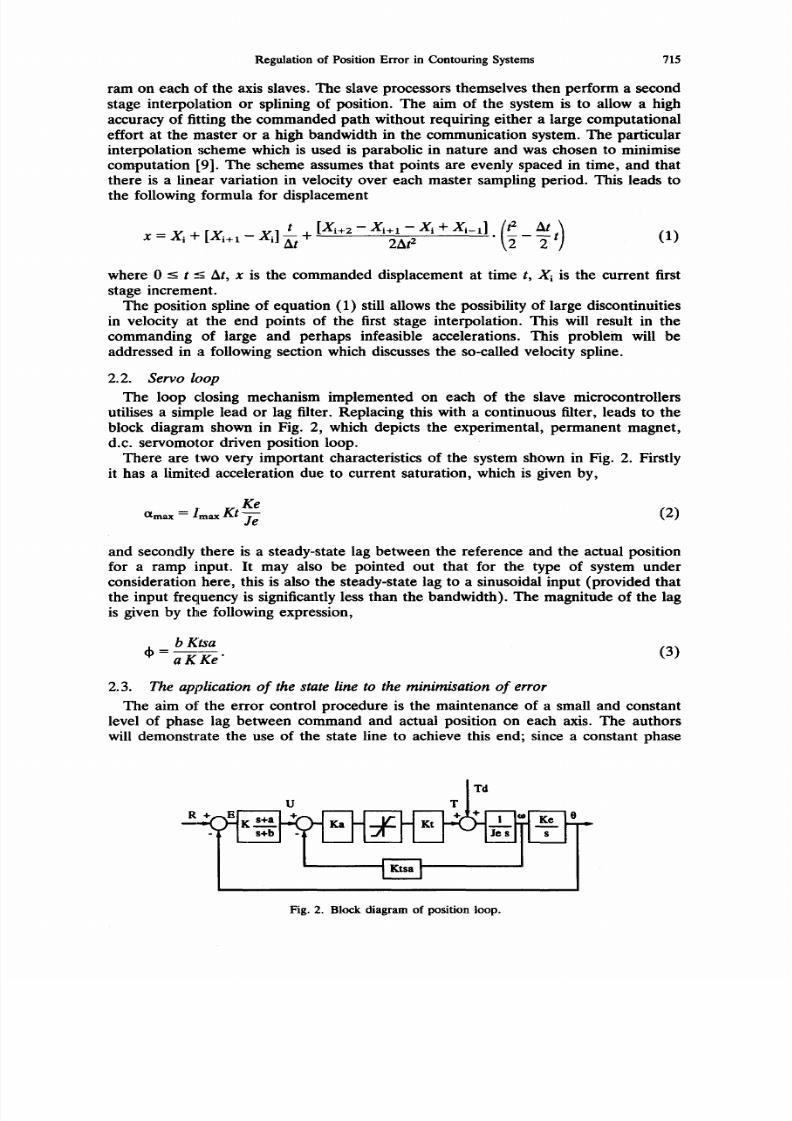
T h e l o o p c l o s in g m e c h a n i s m i m p l e m e n t e d o n e a c h o f t h e s la v e m i c r o c o n t r o l le r s
u t i l i s e s a s im p le l e a d o r l a g f i l t e r . R e p l a c in g t h i s w i th a c o n t i n u o u s f i l t e r , l e a d s t o t h e
b l o c k d i a g r a m s h o w n i n F i g . 2 , w h i c h d e p i c t s t h e e x p e r i m e n t a l , p e r m a n e n t m a g n e t ,
d . c . s e r v o m o t o r d r i v e n p o s i t i o n l o o p .
T h e r e a r e tw o v e r y im p o r t a n t c h a r a c t e r i s t i c s o f t h e s y s t e m s h o w n in F ig . 2 . F i r s t l y
i t h a s a l im i t e d a c c e l e r a t i o n d u e t o c u r r e n t s a tu r a t i o n , w h ic h i s g iv e n b y ,
¢Xma = lmax g t ~ ( 2 )
a n d s e c o n d l y t h e r e i s a s t e a d y - s t a t e l a g b e t w e e n t h e r e f e r e n c e a n d t h e a c t u a l p o s i t i o n
f o r a r a m p i n p u t . I t m a y a l s o b e p o i n t e d o u t t h a t f o r t h e t y p e o f s y s t e m u n d e r
c o n s id e r a t i o n h e r e , t h i s i s a l s o t h e s t e a d y - s t a t e l a g t o a s i n u s o id a l i n p u t ( p r o v id e d t h a t
t h e i n p u t f r e q u e n c y i s s ig n if ic a n tl y l es s t h a n t h e b a n d w i d t h ) . T h e m a g n i t u d e o f t h e l a g
i s g iv e n b y t h e f o l l o w in g e x p r e s s io n ,
b K t s a
d~ - a----KK e ( 3 )
2 . 3 . T h e a p p l i ca t i o n o f t h e s t at e l in e t o t h e m i n i m i s a t i o n o f e r ro r
T h e a i m o f t h e e r r o r c o n t r o l p r o c e d u r e i s t h e m a i n t e n a n c e o f a s m a l l a n d c o n s t a n t
l e v e l o f p h a s e l a g b e t w e e n c o m m a n d a n d a c t u a l p o s i t i o n o n e a c h a x i s . T h e a u t h o r s
w i l l d e m o n s t r a t e t h e u s e o f t h e s t a t e l i n e t o a c h i e v e t h i s e n d ; s i n c e a c o n s t a n t p h a s e
U T ] T d
Fig. 2. Block diagram of position loop.

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 4/16
716 R .J . Seethaler and I. Yellowley
l a g r e q u i r e s a n a x i s e r r o r w h i c h i s p r o p o r t i o n a l t o a x i s v e l o c i t y , t h e n t h e c o n t r o l o f
t h e s t a t e l i n e r e q u i r e s a k n o w l e d g e o f b o t h v e l o c i t y a n d p o s i t i o n e r r o r .
T h e me t h o d u s e d t o c o n t r o l e r r o r u s i n g t h e s t a t e l i n e i s t o p u l l t h e s t a t e l i n e l o w
w h e n t h e a c t u a l e r r o r e x c e e d s t h e a l l o w a b l e ; a n y a x is m a y p u l l t h e s t a t e li n e l o w w h e n
t h i s o c c u r s . T h e a l l o w a b l e e r r o r , a s me n t i o n e d e a r l i e r , i s r e l a t e d t o v e l o c i t y , h o w e v e r
s i n c e s t a t i c e r r o r s w i l l e x i s t a n d s i n c e o n e d o e s n o t w i s h t o r e d u c e t h e a l l o w a b l ea c c e l e r a t i o n a n d b a n d w i d t h , t h e a l l o w a b l e e r r o r i s e x p r e s s e d i n t h e f o r m b e l o w ,
e a U o w a b l e = V 4 ' "1" 8 s t a t i c . ( 4 )
T h e f ir st t e rm a l lo w s f o r t h e e x p e c t e d e r r o r p r o p o r t i o n a l t o v e l o c i ty a n d ~ s t a t i c a l l o w s
f o r f ri c t io n i n d u c e d e r r o r s a n d a r e a s o n a b l e l e v e l o f a ll o w a b l e a c c e l e r a t i o n . T h e s t a t e
l i n e i s a l l o w e d t o r e t u r n t o a h i g h l e v e l o n c e t h e a c t u a l e r r o r i s l e s s t h a n t h e a l l o w a b l e .
T h e p r o c e s s d e s c r i b e d a l l o w s t h e m o d u l a t i o n o f a x is v e lo c i ti e s i n a c o o r d i n a t e d f a s h io n
a n d e f f e ct i v e ly r e d u c e s t h e f r e q u e n c y o f t h e r e f e r e n c e p o s i ti o n c o m p o n e n t s .
T h e v e l o c i t y u s e d t o c a l c u l a t e th e a l l o w a b l e e r r o r w i t h i n t h e c o n t r o l l e r i s a r e f e r e n c e
v e l o c i t y w h i c h i s c a l c u l a t e d b y s p li n i n g t h e f i rs t s t a g e i n t e r p o l a t i o n i n c r e me n t s . T h ea p p r o a c h u s e d h e r e i s d i f f e re n t f r o m t h a t i m p o s e d b y t h e p o s i t i o n s p l in e s i n ce o n e
w i s h e s t o a v o i d d i s c o n t i n u i t i e s i n t h e v e l o c i t y . T h e v a r i a t i o n i n v e l o c i t y a ll o w e d i s a g a i n
l i n e a r a n d i s s h o w n i n F i g . 3 . T h e a p p r o a c h s h o w n i n F i g . 3 c o mp r i s e s f i x i n g t h e
c o m m a n d v e l o c i ty a t t h e j u n c t i o n o f tw o f ir st s ta g e i n t er v a ls t o t h e a v e r a g e o f t h e
v a l u e s o v e r t h e t w o i n c r e m e n t s . I t t h u s t a k e s t w o m a s t e r s a m p l i n g i n t er v a ls t o a c c e l e r a te
f r o m z e r o t o a c o n s t a n t v e l o c i t y . T h e v e l o c i t y s p l i n e i s d e s c r i b e d ma t h e m a t i c a l l y i n
e q u a t i o n ( 5 ) . T h e v e l o c i t y s p l in e i s n o t e q u a l t o t h e d e r i v a t i v e o f t h e p o s i t i o n s p l i n e
a n d i n f a c t i f o n e i n t e g r a t e d t h e v e l o c i t y s p l i n e t h e d i s t a n c e s tr a v e l l e d w o u l d n o t
c o r r e s p o n d t o t h o s e r e q u i r e d . T h e s p l i n e i s u s e d t o c a l c u l a t e a l l o w a b l e e r r o r , w h i c h
i n t u r n i s u s e d t h r o u g h t h e s t at e li n e t o s m o o t h a n d e x t e n d t h e t i m e d o m a i n c o m m a n d
signal .
x t ]V(t) = ( X i + 1 - X i _ l ) --b ( X i + 2 - X i + 1 - X i - -[ - i - l ) ~ • (5)
T h e m o s t o b v i o u s a p p r o a c h t o t h e u s e o f t h e s t at e l in e f o r e r r o r c o n t r o l w o u l d s e e m
t o b e t h e u s e o f a n e r r o r c r i t er i o n i n th e f o r m ,
l e a . o w a b d 1 4 V I + 8 s t a t ic . ( 6 )
T h e c r i t e r i o n a b o v e a l l o w s a n e r r o r b a n d a r o u n d t h e a c t u a l p o s i t i o n , a n d r e s u l t s i nt h e s t a t e l i n e b e i n g t r i g g e r e d w h e n t h e a c t u a l p o s i t i o n i s l e a d i n g t h e r e f e r e n c e p o s i t i o n .
S u c h a n a p p r o a c h f o r c e s t h e s y s t e m t o s lo w d o w n m o r e t h a n n e c e s s ar y . A s ig n s e n si ti v e
e r r o r c r i t e r i o n m a y b e f o r m u l a t e d a s a n a l t e r n a t i v e a s f o l l o w s ,
8
- - - - - V e l o c i t y s p l i n e
Fig. 3. Velocity spline.

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 5/16
Regulation of Position Er ro r in Contouring Systems 717
s i g n ( V ) e a l l o w a b l e < s ign(V ) cb V + ~ s t a t i c • ( 7 )
T h e e x p e r i m e n t a l r e s u lt s w h i c h f o ll o w in s e c t i o n 3 u s e t h e c r i te r i a in e q u a t i o n ( 7 ) ,
t h e v a l u e o f p h a s e u s e d i s t h e s a m e a s w o u l d r e s u l t f r o m t h e t y p e 1 s y s t e m , u s e d i n
r e s p o n s e t o a r a m p i n p u t [ s e e e q u a t io n ( 3 ) ] . T h e s e l e c ti o n o f a v a lu e f o r t h e c o n s t a n t
i n t he c r i t e r i a i s m ore com pl ex , t he t o rq ue ava i l ab l e a t s t ands t i l l m us t c l ea r l y exceeda n y f r ic t io n a l lo a d s , h o w e v e r a t t h e s a m e t im e o n e w i s h e s t o h a v e t h e s y s t e m r e s p o n d
t o r a p i d c h a n g e s in i n p u t ( e i t h e r i n r e f e r e n c e o r d i s tu r b a n c e ) . T h e r e q u i r e m e n t to
a l l ow h i gh va l ues o f acce l e ra t i on , even w hen t he ve l oc i t y i s l ow , l e ads t o t he no t i on
o f d e t e r m i n i n g t h e v a l u e o f ~ s t a t i c i n t he fo l low i ng f a sh i on ,
1~ s t a t i c = , ~ r n a x K Ka (8 )
T h i s l e ads t o t he exp re s s i on fo r t he t o t a l va l ue o f a l l ow ab l e e r ro r a s fo l l ow s ,
b Ktsaea l low ab l e - - V ~ - -I - ~s ta t ic = V
1
a K K e + Ima~ K K a (9 )
2.4. Th e in f luence oJ: the s ta te line approach on dyn am ic perform anc e
T he sys t em w i t h t he s t a t e l i ne i nac t i ve s i m p l y ac t s a s a no rm a l s e rvo sy s t em . In
t h o s e c a s e s w h e n t h e a c t u a l e r r o r s u r p a s s e s t h e a l l o w a b l e e r r o r , t h e s y s t e m s t r u c t u r e
is a l t e r e d , a n d i t b e c o m e s n e c e s s a r y to e x a m i n e d y n a m i c r e s p o n s e a n d s ta b il it y .
I f o n e a s s u m e s t h a t t h e s t a t i c e r r o r , ~ s t a t i c ) , i s sm a l l , t hen acco rd i ng t o eq ua t i on
( 9 ) , t h e e r r o r m u s t b e ,
s R s) b KtsaE ( s ) - a K K e (10 )
t h e n t h e v e l o c it y e r r o r c a n b e e x p r e s s e d i n t h e f o l lo w i n g f o r m ,
E l ( s ) = s R ( s ) b K t s a ( s + a ) S O ( s ) K t s aa K e ( s + b ) K e (11 )
t h e o u t p u t o f t h e s y s t e m i s t h e n ,
K a K t K eO ( s ) = E l ( s ) ~ - s i (12 )
and t he r e su l t i ng c l o sed l oop t r ans fe r func t i on i s g i ven by
K a K t b K t sa ( s + a )F(s) = . ( 1 3 )
a ( s + b ) ( J e s + K a K t K t s a )
S i nce b , J e , K t s a , K a a n d K t a re a l w ays pos i t i ve , t he sy s t em w i l l a l w ays be s t ab l e .
I t is in t e r e s t in g t o n o t e t h a t t h e s y s t e m p e r f o r m a n c e is i n d e p e n d e n t o f t h e c o m p e n s a t o r
g a i n , K a n d t h a t t h e s Ys te m b e c o m e s a s i m p l e la g w h e n t h e C o m p e n s a t o r is u s e d t o
cance l exac t l y t he ve l oc i t y l oop .
2.5. Th e se lect ion o f appropr ia te sys tem parameters
T h e r e a r e a n u m b e r o f p a r a m e t e r s w h i c h m u s t b e s e t to r e a s o n a b l e v a lu e s if t h e
s t a t e l ine app roac h d esc r i bed he re i s t o be succes s fu l. A s i n al l sy s t em s , t he com pen sa t i ng
f i lt e r m u s t be '. cons i d e red . In t h i s c a se ho w e ve r t he se l ec t i on o f s am p l i ng / i n t e rpo l a t i on

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 6/16
7 18 R . J . S e e t h a l e r a n d I . Y e i l o w l ey
i n t e rva l s and t he co e f f i c ien t s i n t he e r ro r c r i t e r i on u sed t o t r i gge r t he s t a t e l i ne a r e
e q u a l l y i m p o r t a n t .
2.5.1. S a m p l i n g t i m e s . F or t he ve l oc i t y sp l i ne t o have any poss i b i l i t y t o g i ve
sa t i s f ac t o ry r e su l t s , i t is neces s a ry to ch oose a m as t e r s am p l i ng ti m e t ha t a l l ow s t he
s y s t e m tw o f ir st s ta g e i n t e r p o l a t io n p e r i o d s t o s l o w d o w n f r o m m a x i m u m s p e e d t o z e r o
speed , t hus ,
V m a x
N - (14)2 amax A T
w h e r e V m~x s t h e m a x i m u m t r a v e r s e v e l o c it y , am a x is t h e m a x i m u m r e q u i r e d a c c e l e r-
a t io n , A T is t h e s e c o n d s t a g e i n t e r p o l a ti o n s a m p l in g p e r i o d a n d N i s th e n u m b e r o f
second s t age s t eps t aken fo r each f i r s t s t age i n t e rpo l a t i on i nc rem en t .
2.5.2. C o m p e n s a t o r p a r a m e t e r s . T h e s e r v o l o o p c o n t a i n s a l e a d l a g c o m p e n s a t o r
t ha t m us t be u t i li s ed t o m a t ch t h e ga i n s o f a l l axes . T he se rvo l oop i t s e l f is a t h i rd
o r d e r s y s t e m . It is f o u n d t h a t g o o d p e r f o r m a n c e is a t ta i n e d w h e n t h e c o m p e n s a t o rl ead i s u sed t o cance l t he ve l oc i t y l oop , t h i s r eq u i r e s t ha t [ s ee eq ua t i on (13 ) ] ,
K t sa K a K t
a - Je (15 )
T h e p h a s e l ag b e t w e e n t h e r e f e r e n c e a n d t h e a c t u a l p o s i ti o n i s t h e s a m e f o r a l l a x e s
a n d s h o u l d w i t h i n m o s t s y s t e m s b e c o m p a r a b l e t o t h e t i m e c o n s t a n t o f t h e v e l o c i t y
l o o p w h i c h h a s b e e n c a n c e l l e d , t h u s ,
b = d~ K K a K t K e (16 )J e
T h e n e x t p a r a m e t e r t o b e c h o s e n i s t h e c o m p e n s a t o r g a i n w h i c h w i l l b e r e l a t e d t o
t h e a l l o w a b l e e r r o r s . I f o n e f o l l o w s t h e a r g u m e n t g i v e n e a r l i e r a n d a l l o w s m a x i m u m
t o r q u e t o b e d e v e l o p e d a t z e r o v e l o c it y t h e n t h e g a in o f t h e c o m p e n s a t o r i s u n i q u e l y
d e f i n e d , [ s e e e q u a t i o n ( 9 ) ] , a s
m a xm
K - ~ s t a t i c Ka (17 )
T h e s e l e c t i o n o f t h e f i l t e r p a r a m e t e r s i n t h e m a n n e r d e s c r i b e d a b o v e , l e a d s t o a
s i m p le s e c o n d o r d e r s y s t e m w i t h u n d a m p e d n a t u r a l f r e q u e n c y a n d d a m p i n g r a t i o g i v en
by t he fo l l ow i ng exp re s s i ons ,
o . = ( 1 8 )
~ = ~ J ( ~ ) . ( 19 )
3. T H E E X A M I N A T I O N O F S Y ST E M P E R F O R M A N C E
A h i g h p e r f o r m a n c e s e r v o s y s t e m w a s c h o s e n t o e x a m i n e s y s t e m p e r f o r m a n c e . T h e
exp e r i m en t a l appa ra t u s cons i s ts o f a con t ro l l e r , PWIV l am p l i f ie r s , and h i gh pe r fo r m an ce
b r u s h e d p e r m a n e n t m a g n e t d . c . s e r v o m o t o r s . T h e s e r v o m o t o r s a r e e q u i p p e d w i t h
t a c h o m e t e r s a n d t w o t r a c k 1 0 00 li n e e n c o d e r s . T h e t a c h o m e t e r s ig n a ls a r e f e d b a c k t o
t he am p l i f i e r s w h i l e t he encode r s i gna l s a r e u t i l i s ed by t he con t ro l com pu t e r . F i gu re

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 7/16
Regulation Of Position Error in Contouring Systems 719
[ ]" Actuatoromputer controller [ Amplifier [
Required
position +/
[BLUI }
t __
Digital filter D/A Converte~ Curren t Torque
~ _ _ ._ . . . I . . . . . . . .
P l - - ; : ; o ; . . . . .
I I ~ Actuator speed
Actual position [BLU]
Encoder
_ ~ position
[BLU]
Fig. 4. Schematic block diagram of position loop.
4 shows a sc,hem a t i c b l ock d i ag ram o f a s i ng l e ax i s o f t he sy s t em and T ab l e 1 g i ves
t h e v a l u e s o f t h e v a r i o u s c o n s t a n ts w i t h in t h e s y s t e m .
T h e f ir st p h a s e o f t h e w o r k c o n c e r n e d w i th t h e e v a l u a t io n o f n e w c o n t r o l s tr a t e g ie s ,
i n v o lv e d t h e c r e a t i o n o f a r e a li s ti c si m u l a ti o n m o d e l o f t h e s y s t e m . T h e p r o g r a m t h a t
w a s d e v e l o p e d a ll o w s t h e e x a m i n a t io n o f th e p a t h p e r f o r m a n c e o f a n a r b it r a r y n u m b e r
o f a x e s a n d t h e i n t r o d u c t i o n o f n o n l i n e a r i n f l u e n c e s . T h e m a j o r n o n l i n e a r i t y i n t h e
bas i c sy s t em com pr i se s t he cu r r en t l i m i t o f t he am p l i f i e r , w h i ch i s i nc l uded i n t he
s i m u l a ti o n . T h e o r d i n a r y d i f f e r e n t ia l e q u a t i o n s c o r r e s p o n d i n g t o t h e a n a l o g p a r t o f t h e
l o o p w e r e s o l v e d u s i n g a s e c o n d o r d e r R u n g e - K u t t a a l g o r i t h m , w h i l e t h e t i m e d o m a i n
eq ua t i ons o f t he d i g i t a l pa r t ( i nc l ud i ng t he s t a t e l i ne ) , w e re so l ved d i r ec t l y . T he
v a l u e s o f t h e v a r i o u s p a r a m e t e r s i n t h e m o d e l w e r e c h o s e n t o c o r r e s p o n d t o t h e h i g h
p e r f o r m a n c e e x p e r i m e n t a l s e r v o s y s t e m , w h i c h w a s a l s o c o n s t r u c t e d a n d t e s t e d t o
v a l i d a t e t h e r e s u l t s f r o m t h e s i m u l a t e d m o d e l . R e s u l t s f r o m t h e e x p e r i m e n t a l s y s t e m
are g i ven i n t he nex t s ec t i on .
T h e m a j o r i t y o f t h e s i m u l a ti o n s h a v e b e e n c o n c e r n e d w i t h c o r n e r t r a c k i n g c a p a b il it y .T h e p a t h c h o s e n r e q u i r e s o n e o f th e s e r v o s to c h a n g e d i r e c ti o n , w h il e th e s e c o n d m a y ,
i n e s senc e , con t i nue a t cons t an t ve l oc i ty . M os t o f t he s i m u l a t ions o f t h is r a t h e r d i f fi cu lt
c o n t o u r h a v e u s e d a n o m i n a l s p e e d o f 5 00 r p m ( o n e m o t o r w ill t h u s r e v e r s e to - 5 0 0 r p m
d u r i n g t h e c o r n e r ) a n d 1 0 0 0 r p m . F i g u r e s 5 a n d 6 s h o w e n l a r g e m e n t s o f t h e s i m u l a t e d
s y s t e m p e r f o r m a n c e ( 5 00 r p m a n d 1 0 0 0 r p m ) . B o t h f ig u r es d e m o n s t r a t e t h e l a r g e
o v e r s h o o t t o b e e x p e c t e d w i t h t h e s y s t e m w i t h o u t t h e s t a te l i n e a c ti v a te d . T h e s y s t e m
w i t h s t a t e l i ne ac t i va t i on e s sen t i a l l y co r r e sponds t o t he t heo re t i ca l s econd s t age i n t e r -
p o l a t e d p a t h t h r o u g h t h e c o r n e r .
Table 1. Experimental parameters
Name Symbol Value Units
Motor torque constant Kt 0.2967Motor inertia Je 0.9636e-3Tachometer feedback Ktsa 0.047Encoder gain Ke 636.6198Maximum current /max 10Maximum speed omax 2000Amplifier gain Ka 13.6136Amplifier bandwidth fCmp~or >750D/A converter gain Kd 0.0049Filter gain Kp 34.1333Filter lead parameter A 0.9
Filter lag parameter B -0.333Master sampling period At 16Slave sampling period AT 0.5Position loop ramp phase lag qb 3Position loop static error 8static 5Position loop natural frequency o~ 666.67Position loop damping ratio ~ 1
N m A
N m s
V/ rad/sec)BLU/radA-rpmA/VHz
msecmsecmsecBLUrad/sec

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 8/16
7 2 0 R . J . S e e t h a l e r a n d I . Y e l l o w l e y
3300E n l a r g e m e n t o f o r n e r t r a c k i n g a t 5 0 0 R P M
o o3200 ~ . ~ o o
~e 'l \ , , o
3 1 0 0 - . o / \ t ,. e / ~ ' \ , o
- .o V , ~ . , , o
i ~ o
2,002 00. / i f / ~ , , . o
o
2600
25000° , I i i I i i \ i2600 2800 3000 3200 3400 3600 3800 4000
T h e t a 1 [ B L U ]
F i g . 5 . S i m u l a t e d p a t h s i n c o r n e r t r a c k i n g a t 5 0 0 r p m : , r e f e r e n c e p o s i t i o n ( f i r s t s t a g e i n t e r p o l a t i o n ) ;
- - - , r e f e r e n c e p o s i t i o n ( s e c o n d s t a g e i n t e r p o l at i o n ) ; o o o , a c t u al p o s i t io n o f s i m p l e s e r v o s y s t e m a n d
* * * , a c t u a l p o s i t i o n o f s y s t e m w i t h a c t i v e s t a t e l i n e .
E n l a r g e m e n t o f c o r n e r t r a c k i n g a t 1 0 00 R P M1.45.l o o
o oo o
1 . 4 0 0 0
~ m ~ t 0~ O
y
< _ / / ,~,~ 1.30 2 ~ 0
, , o
1.25 ~ 1
i 20 I I I I I I I I
1 .25 t . 3 0 . 3 5 1 .40 I A5 1 .50 1 .55 1 .60 1 .65 1 .70 135
T h e t a 1 [BLU] x 104
F i g . 6 . S i m u l a t e d p a t h s i n c o r n e r t r a c k i n g a t 1 0 0 0 r p m : , r e f e r e n c e p o s i t i o n ( f i r s t s t a g e i n t e r p o l a t i o n ) ;
, r e f e r e n c e p o s i t i o n ( s e c o n d s t a g e i n t e r p o l a t i o n ) , o o o , a c t u al p o s i t io n o f s i m p l e s e r v o s y s t e m a n d
• * * , a c t u a l p o s i t i o n o f s y s t e m w i t h a c t i v e s t a t e l i n e.
4 . E X P E R I M E N T A L V E R I F I C A T I O N
E x p e r i m e n t s h a v e b e e n c o n d u c t e d u s i n g t h e s y s t e m d e p i c t e d i n F i g . 2 . T h e f i r s t
s e r ie s o f e x p e r i m e n t s h a v e e x a m i n e d t h e p r o f il in g o £ t h e c o n t o u r s h o w n in F i g. 7 ,
w h i c h in c l u d e s t w o s h a r p c o m e r s , a s w a s t h e c a s e i n th e s i m u l at i on . T h e e x p e r i m e n t
w a s c o n d u c t e d a t n o m i n a l s pe e d s o f 5 0 0 a n d 1 0 0 0 r p m . T h e a c tu al p e r f o r m a n c e o f t h e
s y s t e m i n t r a ve r si n g t h e f i rs t c o r n e r w i t h a n o m i n a l s p e e d o f 5 0 0 r p m i s s h o w n i n F i g.
9 . I t s h o u l d b e n o t e d t h a t th e m e t h o d o f g a t h e r in g d a ta i n v o lv e s t h e c a lc u l a t i o n o f
r e f e r e n c e p o s i ti o n t h r o u g h t h e a d d i ti o n o f e r ro r t o c u r r e n t p o s i ti o n . T h i s p r o c e s s i s
c a r d e d o u t a t t h e m a s te r a n d m a y i n s o m e c i r c u m s t a n c e s b e o u t , o f p h a s e b y o n e p e r i o d
( 0 . 5 m s e c ) . T h i s i s t h e r e a s o n f o r t h e r at h e r c h o p p y p r o f il e o f t h e r e f e r e n c e p a t h d a t a .
T h e m a x i m u m p a th e r r o r w i t h t h e s t at e li n e a c t iv a te d i s le s s th a n t w o d e g r e e s , i n
c o n t r a s t t h e p a th t a k e n b y t h e b a s e s y s t e m ( n o s t at e li n e a c t i va t io n ) i s sh o w n i n F i g .
8 a n d d i s p l a y s a p p r o x i m a t e l y 2 6 d e g r e e s o f p a t h e r r o r .

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 9/16
R egu la t i on o f Pos i t i on E rror in C ontou r ing S ys t em s 721
150
10~
50o
0
o,.C
F-, - 50 -
-100 -
-150-100
X - Y Pos i t i on
/ \ \ . \
I I 1 I I ~ "" I I0 1130 200 30 0 400 500 600
T h e t a I [ d e g ]
700
Fig. 7. C orner t ra ck ing w i th a s im p le s e rv o contro l le r : s o l i d , m a s ter p os i t i on sp line ; da shed , r e f e renc ep os i t i on a nd da sh -dot , a c tu a l p os i t i on .
E n la rgem ent o f con tou r ing pa th
o f s im p le s e rv o at 500 RPM
15 0[ / / ~
1/ \
145F / \
/ / / ~ \ \o
.~. tual path \140 \
o
135 \
\R e ference p a th \ \
\ \13o I I \ I \
6 0 8 0 100
x - D i r e c t i o n [ d e g ]
Fig. 8. E nla rgem en t o f co m e r t ra ck ing s e rvo w i th ou t s ta t e l ine a c t i v a ti on a t 5 0 0 rpm : so l i d , r e f e renc e p os i t i ona nd da shed , a c tu a l p os i t i on .
T h e c o r r e s p o n d i n g s i t ua t io n w i t h a n o m i n a l s p e e d o f 1 0 0 0 r p m is s h o w n i n F ig s 1 0
a n d 1 1. I n t h Ji s c a s e t h e p a t h e r r o rs a re 7 d e g r e e s a n d 9 0 d e g r e e s f o r t h e s t a t e li n e a n d
n o n - s t a t e l i ne : b a s e d s y s t e m s , r e s p e c t i v e l y .
T h e a l g o r i t h m u s e d t o t ri g g er t h e s t a t e li n e i n t h e e x p e r i m e n t s i s th a t s h o w n i n
e q u a t i o n ( 7 ) . T h e i n f l ue n c e o f t h e s ta te l in e c l o si n g i s t o s l o w t h e s y s t e m d o w n as it
p a s s e s t h r o u g h t h e c o r n e r s , h o w e v e r t h e v a r i o u s a p p r o a c h e s t o s t a t e l i n e d o s i n g l e a d
t o v e r y d i f f e r e n t c o n t o u r i n g e f f i c i e n c i e s . T o b e s p e c i f i c , t h e c o n t o u r s h o w n i n F i g . 6 ,
h a s a t r a v e r s e t i m e o f 0 . 2 2 5 s e c u s i n g t h e s i m p l e n o n - s t a t e l i n e s y s t e m . T h e a d d i t i o no f t h e s t a t e l i n e s y s t e m v a s tl y r e d u c e s e r r o r , h o w e v e r i t i n c r e as e s t h e t r a ve r s e t i m e t o
0 . 2 8 5 s e c . T h e u s e o f t h e s i m p l e s t p o s s i b l e s t a t e l i n e s t r a t e g y , i n w h i c h t h e e r r o r i s
c o n s t r a i n e d t o b e l e s s t h a n a c o n s t a n t a m o u n t , l e a d s t o a c o n s i d e r a b l e s l o w i n g ( a
t r av e rs e t i m e o f a p p r o x i m a t e ly 0 . 6 8 s e c , w h e n t h e m a x i m u m e rr or is 3 0 B L U ) .
I t is b el ie v e .d t h a t t h e p e r f o r m a n c e i m p r o v e m e n t d e m o n s t r a t e d b y t h e s y s t e m i s f a ir ly
i m p r e s s i v e , g i i v e n t h e f a c t t h a t t h e a m p l i f i e r s a r e s a t u r a t e d d u r i n g t h e c o r n e r i n g o p e r -

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 10/16
7 2 2 R . J . S e e t h a le r a n d I . Y e l l o w l e y
, 5 o1 4 5 ~
u
.g
I
135
130
E n la rgem ent o f contou r ing p ath o fU B C contro l l e r a t 5 0 0 R P M
/f '
i i \ \6O 8O
x - D i r e c t i o n [(leg]
100
Fig. 9 . E nla rgem en t o f com er t ra ck ing o f s e rv o w i th s ta t e l i ne a c t i v a ti on at 5 0 0 rp m : so l i d , r e f e ren ce p os i t i ona nd da shed , a c tu a l p os i t i on .
E n la rgem ent o f contou r ing p ath o f s im p le s e rv o a t 1 0 0 0 R P M
7 0 0
6 8 0
660 / \
/ \g 640, \
~ 6 2 o i / \
~" 600 Actual path \
5 8 0
56O I I
3 4 5
x D i re c t i on deg ]
\\
\\
Fig. 10 . C lose -u p o f com er t ra ck ing w i thou t s ta te l i ne a c t i v a ti on at 10 0 0 rpm : so l i d , r e f e ren ce p os i t i on a ndda shed , a c tu a l p os i t i on .
a t io n . W h i l e t h e a c tu a l p e r f o r m a n c e o f a n y s y s te m i s h e a v i l y d e p e n d e n t o n t h e q u a l it y
a n d p e r f o r m a n c e o f t h e b a s i c c o n t r o l c o m p o n e n t s , t h e e v a l u a t i o n o f t h e s t a t e l i n e
s y s t em o n t h e b a s i s o f t h e s i m p l e p e r f o r m a n c e i n d i c a t or s h o w n i n e q u a t i o n ( 2 0 ) , w o u l d
l e a d o n e t o b e l i e v e t h a t i t i s r e l a t i v e l y s u c c e s s f u l , t h e i n d e x b e i n g 1 5 0 0 a n d 8 0 0 f o r
5 0 0 a n d 1 0 0 0 r p m , r e s p ec t i v e ly . ( T h e d i f f e r e n c e b e i n g a tt r ib u t a b le t o t h e m o r e s e v e r e
p r of i le r e q u i r e m e n t s a n d t h e l o n g e r p er i o d o f s a t ur a ti o n i n t h e c as e o f t h e h i g h e r
n o m i n a l v e l o c i t y .)
p a t h v e l o c i t y
"q - path e rror (2 0 )
T h e s e c o n d s e r i e s o f e x p e r i m e n t s w e r e c o n c e r n e d w i t h c i r c u l a r i n t e r p o l a t i o n a n d

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 11/16
Regulation of Position Erro r in Contouring Systems 723
Enlargement of contouring path ofUBC controller at 000 RPM
i f Actual path
g
5
x-Direction [degl
Fig. 11. Close-up of co rner tracking with state li ne activation at 1000 rpm : solid, reference position anddashed, actu al position.
h e n c e r e l a t e d t o f r e q u e n c y r e s p o n s e . T h e s t a te l in e s y s t e m o f c o u r s e w il l n o t e x h i b i t
t h e u s u a l f o r m o f f r e q u e n c y r e s p o n s e s i n ce a t h i g h e r f r e q u e n c i e s it w ill s t r e tc h o u t
p e r i o d s o f h i g h a c c e l e r a t i o n t o a v o i d e r r o r . B e f o r e c o n t i n u i n g t o a c o n s i d e r a t i o n o f
t he sy s t em pe r fo rm ance i t i s a s w e l l t o exam i ne t he cons t r a i n t s w h i ch app l y t o t h i s
p a r t i c u la r m o d e o f i n te r p o l a t io n .
T h e m o s t o b v i o u s c o n s t r a i n t o n a n y c i r c u l a r i n t e r p o l a t i o n s y s t e m i s s e t b y t h e
i n t e r p o l a t o r i ts e lf , w h i c h m u s t e n s u r e t h a t t h e m a x i m u m p o s i ti o n e r r o r ( r e f e r e n c e t o
t heo re t i ca l ) , : is l e ss t han 1 B L U , see F ig . 12 . F o r t he t w o s t age i n t e rpo l a t i on sy s t em
used he re , i t ha s been show n [ 9 , 10 ] , t ha t
J 4 2 . 6 6 6 7 ]2~r A tfm~ x = V \ ~ / (21 )
T h e m a x i m u m f r e q u e n c y o f c ir c u l a r i n t e r p o l a ti o n is t h u s r e l a t e d t o t h e r a d i u s a n d
t h e f ir st s ta g e i n t e r p o l a t i o n t i m e . T h e m a x i m u m a l l o w a b le v e l o c i ty o f t h e s y s t e m a l so
p l a c e s a l i m it o n t h e m a x i m u m a l l o w a b l e f r e q u e n c y o f ci r cu l a r i n t e rp o l a t io n . A c c o r d i n g
t o S e e t ha l e r [111 ] t h i s l e ads t o t he fo l low i ng con s t r a i n t ,
O~max= 2"tr m~x rma x. (22 )
T he t h i rd and f i na l m a j o r cons t r a i n t i s t ha t due t o cu r r en t s a t u ra t i on o f t he am p l i f i e r .
I n t h i s c a s e t h e m a x i m u m t o r q u e a n d a c c e l e r a t io n a r e l im i t e d le a d i n g t o t h e f o l lo w i n g
HTH 38 6 E
U
Fig. 12. C ircular interpolation.

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 12/16
7 2 4 R . J . S e e t h a l e r a n d I . Y e l l o w l ey
6
~ 5o -4
3
R a d i u s v s f r e q u e n c y
~ x
I - I I I I L I I I I . . . . .00.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
R a d i u s [ B L U ] x 1 0 4
F i g . 1 3. M a x i m u m r a d i u s v s m a x i m u m f r e q u e n c y : d o t t e d l i n e , l im i t i n g v e l o c i t y c o n s t r a i n t ; d a s h e d l i n e ,l i m i t i n g a c c e l e r a t i o n c o n s t r a i n t a n d s o l i d l i n e , p o s i t i o n s p l i n e c o n s t r a i n t .
Otmax m / m a x g t ~ e e = ( 2 ~ r f m a x ) 2 r m a x . ( 2 3 )
T h e r e la t iv e i m p o r t a n c e o f t h e t h r e e c o n s t r a in t s f o r t h e s y s t e m u n d e r c o n s i d e r a t io n
a r e s h o w n i n F ig . 1 3 . I t i s s e e n t h a t t h e m a x i m u m v e l o c i t y c o n s t r a i n t i s o n l y a c t i v e a t
l o w f r e q u e n c i e s a n d l a r g e r ad i i . F o r t h e s y s t e m u n d e r c o n s i d e r a t i o n w i t h a sl a v e
s a m p l i n g t i m e o f 0 . 5 m s e c a n d a m a s t e r s a m p l i n g t i m e o f 1 6 m s e c , t h e t w o c o n s t r a in t s
mee t a t r e f i t = 5 90 0 B L U a n d r e f i t = 2.9 Hz . A t r ad i i l e s s than r ef it the po s i t ion sp l ine
i mp o s e s t h e d o m i n a n t c o n s t r a i n t . A t r a d ii h i g h e r th a n t h e c r it ic a l r a d i u s , c u r r e n ts a t u r a ti o n i s d o m i n a n t . ( N o t e t h e s t a t e l in e c a n n o t i m p r o v e t h e s i tu a t io n i f t h e p o s i t i o n
s p l i n e c o n s t r a i n t i s v i o l a t e d . )
I f o n e a t t e m p t s t o u s e r e f e r e n c e c o m m a n d s a l o n g t h e p o s i t io n s p l in e c o n s t r ai n t f o r
r a d i i la r g e r t h a n r ef it, t h e s t a t e l i n e s h o u l d p u l l t h e a c t u a l r e s p o n s e d o w n t o t h e l i m i t in g
a c c e l e r a t i o n c o n s t r a i n t l i n e . T h i s m e a n s t h a t t h e o u t p u t f r e q u e n c y w i l l b e r e d u c e d ,
h o w e v e r c l e a r l y c o n s i d e r a b l e d i s t o r t i o n o f t h e t i m e d o m a i n w a v e f o r m w i l l r e s u l t ( t h e
a x e s w i l l s t i l l b e c o o r d i n a t e d ) .
T w o e x p e r i m e n t s h a v e b e e n c o n d u c t e d , i n t h e f ir st a f e e d r a t e h a s b e e n c h o s e n w h i c h
w i ll n o t s a t u r a t e t h e s y s t e m . D u r i n g t h e c o u r s e o f th e f i rs t e x p e r i me n t , t e n c i rc l e s w e r e
c o n t o u r e d a n d t h e t h i r d i s s h o w n i n F i g s 1 4 a n d 1 5 . T h e s t a t e l i n e i s n o t a c t i v a t e d i n
t h e s e e x p e r i m e n t s . T a b l e 2 g i v e s t h e p e r t i n e n t g e o m e t r i c p a r a m e t e r s .F i g u r e 1 4 sh o w s t h e a c t u a l p a t h d u r in g t h e l o w f e e d r a t e e x p e r i m e n t . T h e s y s t e m is
a b l e t o f o l l o w t h e c o n t o u r w e l l . N o s t a t e l i n e i s . n e e d e d , b e c a u s e t h e s a t u r a t i o n l im i t
i s n o t r e a c h e d . T h e a c t u a l p a t h e r r o r f o r m e d f r o m c o n s i d e r a t i o n o f e r ro r s o n e a c h
a x i s , i s s h o w n i n F i g . 1 5 , f r o m w h i c h i t i s s e e n t h a t t h e ma x i mu m v a l u e o f a x i s e r r o r
i s a p p r o x i m a t e l y 4 5 B L U s .
I n t h e s e c o n d e x p e r i m e n t , t h e f e e & a t e w a s c h o s e n s u c h t h a t c u r r e n t s a t u r a t i o n a n d
t h e m a x i m u m r e q u i r e d s p e e d w o u l d m a k e i t i m p o s s i b l e f o r t h e s i m p l e s e r v o ( w i t h o u t
s t a t e li n e a c t i v a t i o n ) t o f o l l o w t h e p a t h . T a b l e 3 s h o w s t h e p a r a m e t e r s f o r th i s e x p e r -
i me n t .
T a b l e 2 . P a r a m e t e r s f o r l o w f e e d r a t e c ir c u l a r i n t e r p o l a t i o n
N a m e V a l u e U n i t s
F r e q u e n c y 3 H z
R a d i u s 5 0 00 B L U
F e e d r a t e 9 42 48 B L U / s e c

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 13/16
,.d
no
4O
30
I
-101-
R e g u l a t i o n o f P o s i ti o n E r r o r i n C o n t o u r i n g Systems
Path du r ing c i r cu la r in te rpola t ion6O O O
Z (-4OOO
-60001 I I I I 1 I I I I-5 0 00 - 4 0 0 0 - 3 0 0 0 - 2 0 0 0 - 10 0 0 0 1 0 00 2 0 0 0 3 0 0 0 4 0 0 0
x- A xis [BLU]
Fig . 14 . Pa th of low f ee&ate c i r cu la r in te r pola t ion exper iment .
-20
-30
- 4 0
-5135 t o 1 5 2 0 2 5 3 0 3 5 4 0 4 5
5000
Pa th e r r or d ur ing c i r cu la r in te r pola t ion
S a m p l e s
Fig . 15 . Pa th e r r or o f s e r vo sys tem dur in g low f eedr a te exper imen t .
Table 3 . Pa r am ete r s f or h igh f eedr a te c i rcu la r in te r pola t ion
725
N a m e V a l u e U n i t s
F r e q u e n c y 3 H zR a d i u s 8 0 00 B L UFeed r a te 150796 BLU /sec
1:0000
Pa th dur ing c i r cu la r in te r pola t ion
,.-1
m
8000
7 0 0 0 -
6 0 0 0 -
5 0 0 0 - i ~4 0 0 0 -
3111111-
I 0 0 00 2o00 400o 6000 8ooo Ioooo t2000
x- A xis [BLU]
Fig ; . 16 . P a th of the s imple se r vo sys tem du r ing the h igh f eedr a te exper imen t .
F i g u r e 1 6 s h o w s t h e a c t u a l p a t h d e s c r i b e d b y t h e t w o a x e s d u r in g t h e h i g h f e e d r a t e
exp e r i m en t u s i ng t he se rvo sy s t em s w i t hou t s t a t e l ine ac t i va ti on . T h e sy s t em i s no t
a b l e t o f o l lo w t h e r e f e r e n c e p a t h , b e c a u s e a c c e l e r a t io n le v e ls h a v e d r i v e n t h e a m p l if ie r s
i n to s a t u r a t io n , a n d t h e r e q u i r e d v e l o c i ty e x c e e d s t h e m a x i m u m v e l o c i ty o f t h e a c t u a t o rs .

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 14/16
7 2 6 R . J . S e e t h a l e r a n d I . Y e l l o w l ey
8 0 0 0
6 0 0 0 i
4000 ̧
20oo
m om
-2000
~ -4ooo
-6000
-8000
P a t h d u r i n g c i r c u l a r i n t e r p o l a t i o n
450 00 -4000 -2000 2000 4000 6000 8000
x - A x i s [ B L U I
F i g . 1 7. P a t h o f s e r v o s y s t e m w i t h a c t i v e s t a t e l in e d u r i n g h i g h f e e d r a t e e x p e r i m e n t .
P a t h e r r o r d u r i n g c i r c u l a r i n t e r p o l a t i o n60
4O
20
0m
-2o
~ . 4 o
. 6 0 -- g o
I 0 2 0 3 0 40 50 60 7 0 8 0 9 0 1 0 0
S a m p l e s
F i g . 18 . P a t h e r r o r o f s e r v o s y s t e m w i t h a ct i v e s t a t e l in e d u r i n g h i g h f e e & a t e e x p e r i m e n t .
F i g u r e 1 7 s h o w s t h e p a t h d e s c r i b e d b y t h e s a m e t w o s e r v o s w i t h t h e s t a t e li n e a c t iv a t e d .
T h e a c t u a l p a t h e r ro r is s h o w n i n F ig . 1 8 a n d i s se e n t o h a v e a m a x i m u m v a l u e o f
7 8 B L U .
4.1. Traverse time and velocity fo r circular interpolation
W h i l e t h e s t a t e l i n e s y s t e m h a s b e e n s h o w n t o b e e f f e c t i v e i n c o n t r o l li n g e r r o r , i t i s
i n o r d e r t o e x a m i n e t h e e f f ic i e n c y w i t h w h i c h i t p e r f o r m s t h is f u n c t i o n . O f m o s t i n t e r e s t
i s a c o m p a r i s o n b e t w e e n t h e p e r f o r m a n c e o f th e r e a l t im e s y s t e m w i th t h e b e s t t h a t
c o u l d b e a c h i e v e d w i t h t h e a p p l i c a ti o n o f a d y n a m i c m o d e l , i n a p r e p ro c e s s i n g s t a g e .
T h e s e c t io n w h i c h f o l l o w s c al c u la t e s t h e t h e o r e t ic a l c h a n g e i n p e r i o d w h i c h w o u l dr e s u l t f r o m s u c h a p r o c e d u r e .
A
F i g . 1 9. I n f l u e n c e o f a c o n s t r a i n t o n t h e t i m e t a k e n t o t r a v e r s e a c i r c le .

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 15/16
R e g u l a t i o n o f P o s i t i o n E r r o r i n C o n t o u r i n g S y s t e m s 7 2 7
T a b l e 4 . E x p e E i m e n t a l v e lo c i t y mea su r ement s a nd c o mp a r i so n w i t h be s t a t t a i na b le in a p r ep r o c e s so r
O r i g i n a l f r e q u e n c y O r i g i n a l p e r i o d F i na l p e r i o d
( H z ) ( m s e c ) ( m s e c ) P e r i o d r a t i o C a l c u l a t e d p e r i o d r a t i o
333 333 1 1
250 250 1 1200 208 1 .04 1
167 189 1.13 1.13
2O
0
-20
LII
2 d o
i m e [ r e s e t]
1000
F i g . 2 0 . P a t h e r r o r f o r s e r v o w i t h n o sta te l ine ac t ivat ion ( 6 H z ) .
2 0
10
0
-Io
- 20
-30
-4C0 200 400 600 800 1000
T i m e [ m s e e l
F i g . 2 1 . P a t h e r r o r f o r s er v o sy s t em w i t h s t a t e l i ne a c t i v a t ed ( 6 H z ) .
D u r i n g c i r c u la r i n t e r p o la t i o n , w i t h a to r q u e c o n s t r ai n t , t h e c o n t o u r i n g v e lo c i t y m u s t
b e r e d u c e d a t f o u r p o i n t s . F i g u r e 1 9 b e l o w , s h o w s t h e p r o c e s s w h e r e o n l y a si n g l e ax i s
h a s s u c h a c o n s t r a i n t . T h i s f i g u r e s h o w s a s y s t e m f o l l o w i n g a s i n e w a v e w i t h a m p l i t u d e
A , t h e s y s t e m s t a rt s s l o w i n g d o w n a t t i m e t l . T h e t i m e r e q u i r e d t o tr a ve l f r o m t l t o
t h e m a x i m u m d i s p la c e m e n t i s l ab e l ed A t .
I n t h e e a s e w h e r e b o t h a x e s h a v e t h e s a m e c o n s t r a i n t ( a n d t h e s e d o n o t o v e r l a p ) ,
t h e r a t i o o f t h e a c t u a l p e r i o d t o t h a t p r o g r a m m e d i s g i v e n b y

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 16/16
728 R .J . See tha le r and I . Ye l lowley
R =2 q + 2 A t - ~ / 2 t o
rr/2to( 2 4 )
w h e r e :
t l = ls in - l (Imax Kt K elto \ to2 AJ e ]
( 2 5 )
A to cos( to t l )At - Ke ( 2 6 )
I m a x g t ~ e
A s e p a r a t e s e t o f e x p e r i m e n t s w a s c o n d u c t e d t o t r a c k c a r e f u l l y t h e t i m i n g o f t h e
c i rc u l ar i n t e r p o l at i o n . T h e s e u s e d t h e s a m e p a r a m e t e r s a s g iv e n i n T a b l e 1 . I t s h o u l d
h o w e v e r b e s a i d t h a t t h e a c t u a l a mp l i f i e r s u s e d w e r e d i f f e r e n t . I n t h i s n e w s e r i e s
f r e q u e n c i e s f r o m 4 t o 6 H z w e r e c h o s e n w i t h t h e r a d i u s s e t a t 2 00 0 B L U . T h e s e tt i n g
o f a v e r y a c c u r a te c u r r e n t l im i t w a s fo u n d t o p o s e s o m e c o n s i d e r a b l e p r o b l e m s ( in f a c t
t h e c u r r e n t l i m i t v a r i e s s l i g h t l y o n s o m e a x e s d e p e n d i n g u p o n d i r e c t i o n a n d t y p e o f
i n p u t ) . S i n c e t h e a c t u a l c u r r e n t l i m i t w i ll e x e r t a v e r y la r g e i n f lu e n c e o n t h e p e r f o r m a n c e
o f t h e s y s t e m , a mo r e r e a l i st i c a p p r o a c h w a s t a k e n a s f o l lo w s . T h e l im i t w a s s e t t o
a p p r o x i m a t e l y 1 5 A o n e a c h a x i s a n d t h e f r e q u e n c y o f ci rc u l ar i n t e r p o l a t io n i n c r e a se d
u n t il s a t u r a ti o n o c c u r r e d . T h e p e r f o r m a n c e a t a h i g h e r f re q u e n c y w a s t h e n e x a m i n e d
a n d c o m p a r e d w i t h th a t a c h i e v a b l e b y a p r e p r o c e s s o r . T h e d a t a a r e s h o w n i n T a b l e
4 . I t is s e e n t h a t t h e s y s t e m j u s t s a t u r a t e d a t 5 H z ; a t 6 H z , t h e r a t i o o f b o t h t h e s t a t e
l in e c o n t r o l l e d p e r i o d a n d t h a t w h i c h w o u l d h a v e b e e n a c h i e v e d b y a p r e p r o c e s s o r a r e
e q u a l a t 1 . 13 . T h e a c t u a l p e r f o r m a n c e i n c o n t r o l l i n g e r r o r i s d e m o n s t r a t e d i n F i g s 2 0
a n d 2 1 , w h e r e t h e e f f e c t i v e n e s s o f th e s t a t e l in e i s a g a i n e v i d e n t .
5 . C O N C L U S I O N S
A n e w a p p r o a c h t o t h e m i n i m i s a ti o n o f e r r o r i n c o n t o u r i n g i s p r o p o s e d ; t h e m e t h o d
i s b a s e d u p o n t h e c o n t r o l o f e r r o r a s a fu n c t i o n o f a p r e d i c t e d v e l o c it y . T h e m e c h a n i s m
u s e d t o c o n t r o l e r r o r i s t h e m o d u l a t i o n o f v e l o c i t y u s i n g a l o g i c l i n e ( s t a t e l i n e ) , w h i c h
i s w r i t t e n t o a n d r e a d f r o m b y e a c h a x i s s l a v e p r o c e s s o r w i t h in a n o p e n a r c h i t e c t u r e
c o n t r o l s y s te m . T h e s y s t e m h a s b e e n t e s t e d t h r o u g h s i m u l a ti o n a n d e x p e r i m e n t a n d
s h o w n t o p e r f o r m w e l l i n b o t h c o r n e r t r a c k i n g a n d c i r c u l a r i n t e r p o l a t i o n .
R E F E R E N C E S
[1] H. A . P ak , A dap t ive ma tch ing and p rev iew con t ro l l e r s fo r f e ed d r ive s yst ems , ASME Trans . J . EngngInd. 113, 316-320 (1991).
[2 ] M . To mizuka , Z e ro phas e e r ro r t r a ck ing a lgo r i thm fo r d ig i ta l con t ro l , ASME Trans. J . Dyn. Syst .Meas. Control 109, 65-68 (1987).
[3 ] J . B u t t l e r , B . Haack and M . Tomizuka , Re fe rence inpu t gene ra t ion fo r h igh s peed coord ina ted mot ionof a two axis sys tem, A S M E J. Dyn. Syst . Meas. Control 113, 67-74 (1991).
[4 ] M . W eck and G . Y e , S ha rp come r t r a ck ing us ing the IKF con t ro l s t r a t egy , A n n . C 1 R P 39, 437-441(1990).
[5 ] Y. Koren , C ros s -coup led b iax ia l comp ute r con t ro l fo r manufac tu r ing s ys t ems , ASME Trans . J . Dyn .Syst . Meas. Control 102(4) , 265-272 (1980).
[6 ] Y. Kore n and C . C . L o , V a r i ab le ga in c ros s -coup l ing con t ro l l e r fo r con tou r ing , A n n . C I R P 104,371-374 (1991).
[7 ] I . Ye l lowley and P . R . Po t t i e r , The in t eg ra t ion o f p roces s and geom e t ry w i th in an open a rch i t e c tu remach ine too l con t ro l l e r , Int . J. Mach. Tools Manufact. 34(2 ) , 277-293 (1994) .
[8 ] R . A rdek an i and I . Ye l lowley , The co n t ro l o f mu l t ip l e cons t ra in t s w i th in an open a rch i t e c tu re mach inetoo l con t ro l l e r , A S M E J . E n g n g I n d. (accep ted fo r pub l i c a t ion ) .
[9 ] I . Ye l lowley and P . P o t t i e r , A no te on a s imp le me thod fo r the improvem en t o f in t e rpo la t ion accu racyin a gene ra l pu rpos e , mu l t ip roces s o r ba s ed mot ion con t ro l l e r , Int . J. Mach. Tools Manu[act. ~ ( 2 ) ,287-292 (1989) .
[10 ] P . Po t t i e r , Advanced con t ro l l e r fo r mach ine too l s , M .Sc . Thes i s , M cM as te r Un ive rs i ty , Hami l ton ,On ta r io (1991) .
[11 ] R . S ee tha le r , A new con tou r ing a lgo r i thm fo r the UB C ccon t ro l l e r , M .Sc . Thes i s , Un ive rs i ty o f B r i t is hC o lumbia , C anada (1993) .
Top Related