artigo de controle
17
tP.rgmon Int. J. Mach . Tools Manufact. Vo l. 36, No. 6, pp. 71 3-728, 1996 Copyright © 1996 Elsevier Science Ltd 0890-6955/ 96515.00 + .00 0890-6955(95)00055-0 THE REGULATION OF POSITION ERROR IN CONTOURING SYSTEMS R. J. SEETHALERt and I. YELLOWLEYt (Received 15 July 1994; in final form 3 M ay 1995) Ab6traet--The aulLhors discuss the use of a novel hardware configuration in the control of position error during contouring operations. The architecture described allows real time error control in multiple axis systems; this is achieved by allowing any axis with a phase lag which exceeds that specified, to slow down the entire system until it is in conformance. The performance of the system is demonstrated by both simulation and experiment, using cornering and circular interpolation as examples. The major contribution of the work is thought to be the ability of the system to cope, in real time, with system constraints and nonlinearities. Copyright (~) 1996 Elsevier Science Ltd 1. INTRODUCTION In the last decade considerable effort has been devoted to the design of high speed contouring algorithms. The simultaneous development of faster computer hardware, has also had a significant impact on the feasible level of complexity in control strategies and the bandwidth of the measuring subsystems. The problem of reducing path error or individual axis errors may be achieved through path preproce,;sing, in which a dynamic model of the machine system is utilised in the path planning process (Pak [1], has given a recent machine tool related example). The paper which follows is, however, concerned with the real time control of error, which from a viewpoint of practice, is perhaps a more recent activity. Several other authors have examined this area, notably Tomizuka, [2, 3], who has attempted to minimise path error through the achievement of as close as possible to zero phase lag between the command and actual position of each axis. The essence of the work described by Tomizuka is the use of a compensating filter which attempts to cancel the dynamics of the control loop; it should be evident that this type of approach presupposes a good knowledge of plant structure and parameters. Additional problems are likely with any such system due to physical constraints and nonlinearities; in the case of the previous work, the authors have suggested ways to avoid large accelerations and indeed later work by Weck [4] has proposed a solution to this problem which involves placing a low pass filter in front of the controller. The solution proposed by Weck alleviates the amplifier saturation problem and in practice, has been shown to lead to an improved performance in corner tracking. A rather different approach to the minimisation of path error has been introduced by Koren [5, 6], who sets out to minimise path error, while still allowing actual individual axi,; position errors. The approach requires the calculation of a path error from the individual errors of the individual axes. It then uses this path error to compensate the individual axes. The strategy suggested by Koren requires very fast hardware to allow this procedure of cross coupling errors to be achieved in a realistic fashion. The approach taken in this paper is intended to allow the possibility of controlling error in real time, even in those cases where constraints such as amplifier saturation are encountered. The approach derives much from the architecture of a control system tDepartment of Mechanical Engineering, University of British Columbia, Vancouver, Canada V6T 1W5. 713
Transcript of artigo de controle

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 1/16
t P . r g m o n
Int. J. Mach . Tools Manufact. Vo l. 36, No. 6, pp. 71 3-728, 1996Copyright © 1996 Elsevier Science Ltd
Printed in G reat Britain. All righ ts reserved0890-6955/96515.00 + .00
0 8 9 0 - 6 9 5 5 ( 9 5 ) 0 0 0 5 5 - 0
T H E R E G U L A T I O N O F P O S I T I O N E R R O R I N C O N T O U R I N G
S Y S T E M S
R . J . S E E T H A L E R t a n d I . Y E L L O W L E Y t
(Received 15 July 1994; in final form 3 M ay 1995)
A b 6 t r a e t - - T h e a u l L h o r s d i s c u s s t h e u s e o f a n o v e l h a r d w a r e c o n f i g u r a t i o n i n t h e c o n t r o l o f p o s i t i o n e r r o r
d u r i n g c o n t o u r i n g o p e r a t i o n s . T h e a r c h i t e c t u r e d e s c r i b e d a l l o w s r e a l t i m e e r r o r c o n t r o l i n m u l t i p l e a x i s
systems; t h i s i s a c h ie v e d b y a l lo w in g a n y a x i s w i th a p h a s e l a g w h ic h e x c e e d s th a t s p e c i f i e d , t o s lo w d o w n
t h e e n t i r e s y s t e m u n t i l i t i s i n c o n f o r m a n c e . T h e p e r f o r m a n c e o f t h e s y s t e m i s d e m o n s t r a t e d b y b o t h
s i m u l a t i o n a n d e x p e r i m e n t , u s i n g c o r n e r i n g a n d c i r c u l a r i n t e r p o l a t i o n a s e x a m p l e s . T h e m a j o r c o n t r i b u t i o no f t h e w o r k i s t h o u g h t t o b e t h e a b i l it y o f th e s y s t e m t o c o p e , i n r e a l t im e , w i t h s y st e m c o n s t r a i n t s a n dn o n l in e a r i t i e s . C o p y r ig h t (~ ) 1 9 9 6 E l s e v ie r S c ie n c e L td
1 . I N T R O D U C T I O N
I n t h e l a s t d e c a d e c o n s i d e r a b l e e f f o r t h a s b e e n d e v o t e d t o t h e d e s i g n o f h i g h s p e e d
c o n t o u r i n g a l g o r i t h m s . T h e s i m u l t a n e o u s d e v e l o p m e n t o f f a s t e r c o m p u t e r h a r d w a r e ,
has a l so h ad a s i gn i fi can t i m pac t on t h e f ea s i b l e leve l o f com p l ex i t y i n con t ro l s t r a t eg i e s
a n d t h e b a n d w i d t h o f t h e m e a s u r i n g s u b s y s t e m s .
T h e p r o b l e m o f r e d u c i n g p a t h e r r o r o r i n d iv i d u a l a x is e r r o r s m a y b e a c h i e v e d th r o u g h
p a t h p r e p r o ce , ;s i n g , in w h i c h a d y n a m i c m o d e l o f t h e m a c h i n e s y s t e m is u t il is e d i n t h e
p a t h p l a n n i n g p r o c e s s ( P a k [ 1 ], h a s g i v en a r e c e n t m a c h i n e t o o l r e l a te d e x a m p l e ) . T h e
p a p e r w h i c h f o ll o w s is , h o w e v e r , c o n c e r n e d w i t h th e r e a l ti m e c o n t r o l o f e r r o r , w h i c hf r o m a v i e w p o i n t o f p r a c t ic e , i s p e r h a p s a m o r e r e c e n t a c t iv i ty . S e v e r a l o t h e r a u t h o r s
h a v e e x a m i n e d t hi s a r e a , n o t a b l y T o m i z u k a , [ 2 , 3 ] , w h o h a s a t t e m p t e d t o m i n i m i s e
p a t h e r r o r t h r o u g h t h e a c h i e v e m e n t o f a s c l o se a s p o s s ib l e to z e r o p h a s e l ag b e t w e e n
t h e c o m m a n d a n d a c t u a l p o s i t i o n o f e a c h a x i s . T h e e s s e n c e o f t h e w o r k d e s c r i b e d b y
T o m i z u k a i s t h e u s e o f a c o m p e n s a t i n g f i l t e r w h i c h a t t e m p t s t o c a n c e l t h e d y n a m i c s
o f t h e c o n t r o l lo o p ; i t s h o u l d b e e v i d e n t t h a t t h is t y p e o f a p p r o a c h p r e s u p p o s e s a g o o d
k n o w l e d g e o f p l a n t s t ru c t u r e a n d p a r a m e t e r s . A d d i t i o n a l p r o b l e m s a r e l ik e l y w i t h a n y
such sys t em due t o phys i ca l cons t r a i n t s and non l i nea r i t i e s ; i n t he ca se o f t he p rev i ous
w o r k , t h e a u t h o r s h a v e s u g g e s t e d w a y s t o a v o i d l a r g e a c c e l e r a t i o n s a n d i n d e e d l a t e r
w o r k b y W e c k [ 4 ] h a s p r o p o s e d a s o l u t i o n t o t h i s p r o b l e m w h i c h i n v o l v e s p l a c i n g a
l ow pass f i l t e r i n f ron t o f t he con t ro l l e r . T he so l u t i on p roposed by Weck a l l ev i a t e s t he
a m p l i f i e r s a t u r a t i o n p r o b l e m a n d i n p r a c t i c e , h a s b e e n s h o w n t o l e a d t o a n i m p r o v e d
p e r f o r m a n c e i n c o r n e r t r a c k i n g .
A r a t h e r d i f f e r e n t a p p r o a c h t o t h e m i n i m i s a t io n o f p a t h e r r o r h a s b e e n i n t r o d u c e d
by K ore n [ 5 , 6 ] , w ho se t s ou t t o m i n i m i se pa t h e r ro r , w h i l e stil l a l low i ng ac t ua l
i nd i v i dua l ax i, ; pos i t i on e r ro r s . T he app roac h r eq u i r e s t he ca l cu l a t ion o f a pa t h e r ro r
f r o m t h e i n d iv i d u a l e r ro r s o f t h e i n d iv i d u a l a x e s . I t t h e n u s e s t h is p a t h e r r o r t o
c o m p e n s a t e t h e i n d i v i d u a l a x e s . T h e s t r a t e g y s u g g e s t e d b y K o r e n r e q u i r e s v e r y f a s t
ha rdw are t o a l l ow t h i s p rocedu re o f c ro s s coup l i ng e r ro r s t o be ach i eved i n a r ea l i s t i c
f a sh i on .
T he app roach t aken i n t h i s pape r i s i n t ended t o a l l ow t he poss i b i l i t y o f con t ro l l i ng
e r ro r i n r ea l t i m e , even i n t hose ca se s w he re cons t r a i n t s such a s am p l i f i e r s a t u ra t i on
a r e e n c o u n t e r e d . T h e a p p r o a c h d e r i v e s m u c h f r o m t h e a r c h it e c tu r e o f a c o n t ro l s y s te m
t D e p a r t m e n t o f M e c h a n i c a l E n g i n e e r i ng , U n i v e r s it y o f B r i t i sh C o l u m b i a , V a n c o u v e r , C a n a d a V 6 T 1 W 5 .
713

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 2/16
714 R .J . Seethaler and I. Yellowley
a rch i t ec t u re deve l o ped a t t he Un i ve r s i t y o f B r it i sh C o l um bi a [ 7 ] . A b r i e f de sc r i p t i on
o f t he a r ch i t ec t u re i s g i ven i n t he fo l l ow i ng sec t i on .
2. UBC CONTRO LLER
T h e c o n t r o l l e r ut il is e s e i th e r t h e 8 b it S T D o r 3 2 b i t S T D 3 2 B u s. T h e m a s t e r
p roce s so r i s an I N T E L 80X86 . In t yp i ca l c a se s up t o 15 ax is sl ave con t ro l l e r s m a y bei n s t a ll ed . T h e so f t w a re sy s t em i nc l udes a t w o s t age i n t e rpo l a t i on sy s t em and , i n t he
w o r k d e s c r i b e d i n t h i s p a p e r , t h e m a s t e r u p d a t e s t h e p o s i t i o n o f e a c h s l a v e e v e r y
1 6 m s e c ( th i s c o r r e s p o n d s t o a p p r o x i m a t e l y f o u r t i m e s t h e v e l o c it y l o o p t i m e c o n s t a n t
o f t h e a x i s se r v o s ) . T h e s la v e p ro c e s s o r s a r e u s u a l ly b a s e d u p o n I N T E L 8 0C 1 96
m i c rocon t ro l l e r s ; t he se i m p l em en t l oop c l o s i ng , a d i g i t a l l e ad l ag f i l t e r and a s econd
s t a g e i n t e r p o l a ti o n p r o c e s s . T h e c o n t r o ll e r s i n t e r p o l a te 3 2 t i m e s b e t w e e n e v e r y m a s t e r
pos i t i on , t he l oo p is c l o sed a t the s a m e t i m e l ead i ng t o a s e rvo upd a t e r a t e , i n t h i s
ca se , o f 0 . 5 m sec . T he f i r s t and second s t age i n t e rpo l a t i on f r eq uenc i e s a r e i m por t an t
p a r a m e t e r s i n c o n t r o l l i n g t h e p a t h e r r o r .
T h e a r c h i t e c t u r e , w h i c h is s h o w n i n F i g . 1 , e n s u r e s t h a t m o s t o f t h e w o r k l o a d is
t a k e n f r o m t h e m a s t e r a n d t r a n s f e r r e d o t h e s la v e c o n t r o ll e r s a n d t h a t t h e r e q u i r e db a n d w i d t h o f t h e b u s i s r e d u c e d f o r a n y f i x ed n u m b e r o f s la v e s a n d s e r v o u p d a t e t i m e .
T h e m a j o r a d d i t io n a l f e a t u r e o f t h e a r c h i t e c t u r e is t h e a d d i t i o n o f p a r a ll e li s m t h r o u g h
t he u se o f so -ca l l ed s t a t e l i ne s t o connec t t he ax i s s l aves and t he p roces s / t echno l ogy
s l a v e s . E a c h o f t h e s t a t e l i n e s r e p r e s e n t s a n A N D I N G o f t h e c o n d i t i o n o f a l l b o a r d s
w h i c h w r i t e t o i t , t h e y a r e u s u a l ly a c h i e v e d , p h y s ic a ll y t h r o u g h t h e u s e o f o p e n c o l l e c to r
l i n e s . T h e n o r m a l m o d e o f u s e o f t h e l i n e i s t o h a v e e a c h b o a r d w r i t e a n d r e a d f r o m
t he l i ne s a t t he end and s t a r t , r e spec t i ve l y , o f t he s econd s t age i n t e rpo l a t i on cyc l e .
T he r e su l t i n t he s i m p l e s t c a se o f a s i ng l e s t a t e l i ne w h i ch i s u sed i n t h i s app l i ca t i on
i s one o f t he fo l l ow i ng :
( a ) S h o u l d t h e l i n e b e h i g h t h e i n t e r p o l a t i o n a n d c o n t r o l f u n c t i o n s g o a h e a d a s
n o r m a l .
( b ) S h o u l d t h e l i n e b e l o w , t h e p a s t i n t e r p o l a t i o n s t e p i s r e p e a t e d , i . e . n o f u r t h e r
p o s i t i o n i s a d d e d t o t h e p o s i t i o n c o m m a n d ; t h e l o o p i s h o w e v e r c l o s e d n o r m a l l y .
O n e m a y s e e t h e n t h a t t h e e f f e c ti v e c o m m a n d v e l oc it y m a y b e r e d u c e d t h r o u g h t h e
use o f t he s i ng l e s t a t e l i ne , and t ha t any o f t he s l aves , e i t he r ax i s s l aves o r p roces s
s la v e s, m a y a c h i e v e t hi s e n d , t h e f i n al v e lo c i ty a c h i e v e d t h e n b e i n g d e t e r m i n e d b y t h e
t i gh t e s t o f t he cons t r a i n t s . A p rev i ous pap e r , R e f , [ 8 ] , ha s exa m i ned t he u se o f th i s
m e c h a n i s m i n f o r c e c o n t r o l .
2.1. Basic interpolation system
T he pos i t i on i nc rem en t s ca l cu l a t ed by t he f i r s t s t age i n t e rpo l a t i on sy s t em w h i ch runs
o n t h e m a s t e r , a r e t r a n s f e r r e d o v e r th e b a c k p l a n e ( S T D o r S T D 3 2 ) t o b u f f e r s i n b i p o r t
Master
CPU
80x86
STD BUS
Slave
CPU
Axis I
S l a v e
CPU
Axis 2
Coordinating line
State line
F r o n t p la n e B u s
Fig. 1. UBC controller architecture.
Slave
CPU
Axis 3
Fw
r
8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 3/16
Regu lation of Position Err or in Conto uring Systems 715
r a m o n e a c h o f t h e a x is s la v e s. T h e s l a v e p ro c e s s o r s t h e m s e l v e s t h e n p e r f o r m a s e c o n d
s t a g e i n t e r p o l a t i o n o r s p l i n i n g o f p o s i t i o n . T h e a i m o f t h e s y s t e m i s t o a l l o w a h i g h
a c c u r ac y o f f it ti n g t h e c o m m a n d e d p a t h w i t h o u t r e q u i r i n g e i t h e r a l a rg e c o m p u t a t i o n a l
e f f o r t a t t h e m a s t e r o r a h i g h b a n d w i d t h i n t h e c o m m u n i c a t i o n s y s te m . T h e p a r t i c u l a r
i n t e r p o l a t i o n s c h e m e w h i c h i s u s e d i s p a r a b o l i c i n n a t u r e a n d w a s c h o s e n t o m i n i m i s e
c o m p u t a t i o n [ 9 ] . T h e s c h e m e a s s u m e s t h a t p o i n t s a r e e v e n l y s p a c e d i n t i m e , a n d t h a tt h e r e i s a l i n e a r v a r i a t i o n i n v e lo c i t y o v e r e a c h m a s t e r s a m p l in g p e r io d . T h i s l e a d s t o
t h e f o l lo w i n g f o r m u l a f o r d i s p l a c e m e n t
x = X i + [ X i + l - x i ] t [ Xi +2 - X i ~ A ~ - X i q - X i - 1 ] ( ~ - - - 2 a t t) (1)
w h e r e 0 -< t -'-: A t, x i s t h e c o m m a n d e d d i s p l a c e m e n t a t t im e t , X i i s t h e c u r r e n t f i r s t
s t a g e i n c r e m e n t .
T h e p o s i t i o n s p l i n e o f e q u a t i o n ( 1 ) s t il l a l l ow s t h e p o s s ib i li t y o f l a r g e d i s c o n t i n u i t i e s
in v e lo c i t y a t t h e e n d p o in t s o f t h e f i r s t s t a g e i n t e r p o l a t i o n . T h i s w i l l r e s u l t i n t h e
c o m m a n d i n g o f la r g e a n d p e r h a p s i n fe a s ib l e a c c e le r a ti o n s . T h i s p r o b l e m w i ll b e
a d d r e s s e d i n a f o l l o w in g s e c t i o n w h ic h d i s c u s s e s t h e s o - c a l l e d v e lo c i t y s p l i n e .
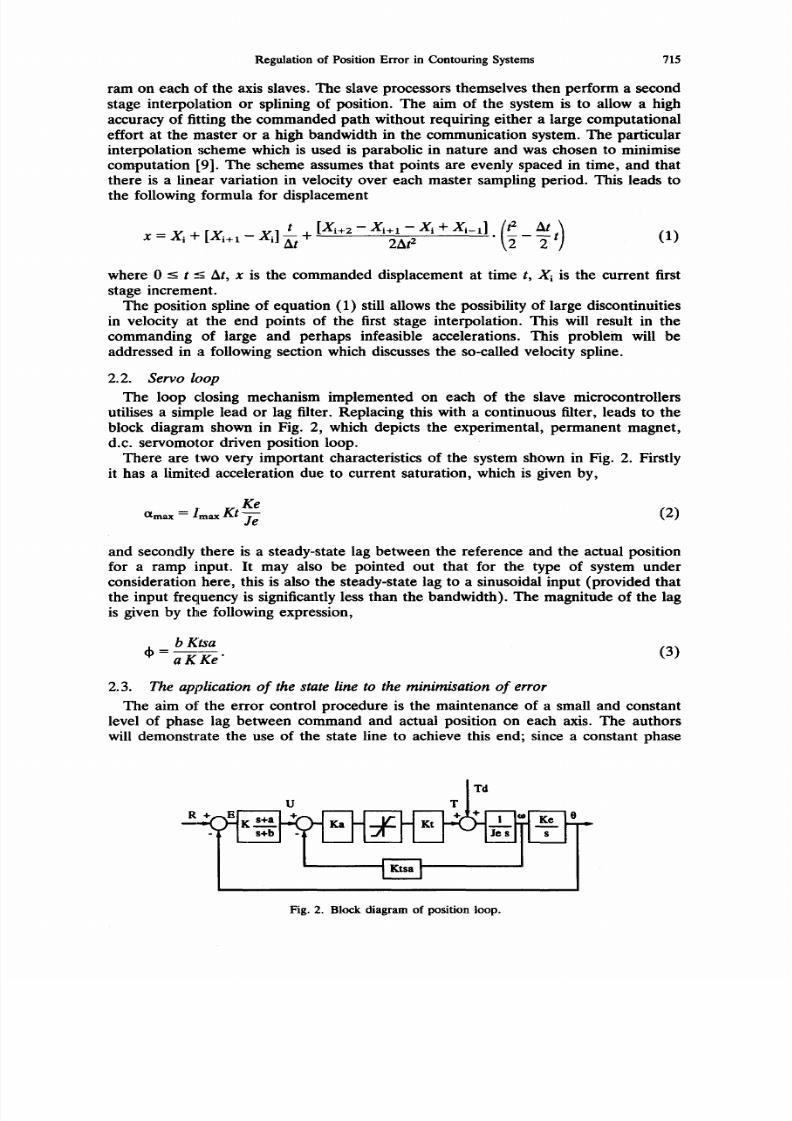
2 .2 . S e r v o l o o p
T h e l o o p c l o s in g m e c h a n i s m i m p l e m e n t e d o n e a c h o f t h e s la v e m i c r o c o n t r o l le r s
u t i l i s e s a s im p le l e a d o r l a g f i l t e r . R e p l a c in g t h i s w i th a c o n t i n u o u s f i l t e r , l e a d s t o t h e
b l o c k d i a g r a m s h o w n i n F i g . 2 , w h i c h d e p i c t s t h e e x p e r i m e n t a l , p e r m a n e n t m a g n e t ,
d . c . s e r v o m o t o r d r i v e n p o s i t i o n l o o p .
T h e r e a r e tw o v e r y im p o r t a n t c h a r a c t e r i s t i c s o f t h e s y s t e m s h o w n in F ig . 2 . F i r s t l y
i t h a s a l im i t e d a c c e l e r a t i o n d u e t o c u r r e n t s a tu r a t i o n , w h ic h i s g iv e n b y ,
¢Xma = lmax g t ~ ( 2 )
a n d s e c o n d l y t h e r e i s a s t e a d y - s t a t e l a g b e t w e e n t h e r e f e r e n c e a n d t h e a c t u a l p o s i t i o n
f o r a r a m p i n p u t . I t m a y a l s o b e p o i n t e d o u t t h a t f o r t h e t y p e o f s y s t e m u n d e r
c o n s id e r a t i o n h e r e , t h i s i s a l s o t h e s t e a d y - s t a t e l a g t o a s i n u s o id a l i n p u t ( p r o v id e d t h a t
t h e i n p u t f r e q u e n c y i s s ig n if ic a n tl y l es s t h a n t h e b a n d w i d t h ) . T h e m a g n i t u d e o f t h e l a g
i s g iv e n b y t h e f o l l o w in g e x p r e s s io n ,
b K t s a
d~ - a----KK e ( 3 )
2 . 3 . T h e a p p l i ca t i o n o f t h e s t at e l in e t o t h e m i n i m i s a t i o n o f e r ro r
T h e a i m o f t h e e r r o r c o n t r o l p r o c e d u r e i s t h e m a i n t e n a n c e o f a s m a l l a n d c o n s t a n t
l e v e l o f p h a s e l a g b e t w e e n c o m m a n d a n d a c t u a l p o s i t i o n o n e a c h a x i s . T h e a u t h o r s
w i l l d e m o n s t r a t e t h e u s e o f t h e s t a t e l i n e t o a c h i e v e t h i s e n d ; s i n c e a c o n s t a n t p h a s e
U T ] T d
Fig. 2. Block diagram of position loop.

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 4/16
716 R .J . Seethaler and I. Yellowley
l a g r e q u i r e s a n a x i s e r r o r w h i c h i s p r o p o r t i o n a l t o a x i s v e l o c i t y , t h e n t h e c o n t r o l o f
t h e s t a t e l i n e r e q u i r e s a k n o w l e d g e o f b o t h v e l o c i t y a n d p o s i t i o n e r r o r .
T h e me t h o d u s e d t o c o n t r o l e r r o r u s i n g t h e s t a t e l i n e i s t o p u l l t h e s t a t e l i n e l o w
w h e n t h e a c t u a l e r r o r e x c e e d s t h e a l l o w a b l e ; a n y a x is m a y p u l l t h e s t a t e li n e l o w w h e n
t h i s o c c u r s . T h e a l l o w a b l e e r r o r , a s me n t i o n e d e a r l i e r , i s r e l a t e d t o v e l o c i t y , h o w e v e r
s i n c e s t a t i c e r r o r s w i l l e x i s t a n d s i n c e o n e d o e s n o t w i s h t o r e d u c e t h e a l l o w a b l ea c c e l e r a t i o n a n d b a n d w i d t h , t h e a l l o w a b l e e r r o r i s e x p r e s s e d i n t h e f o r m b e l o w ,
e a U o w a b l e = V 4 ' "1" 8 s t a t i c . ( 4 )
T h e f ir st t e rm a l lo w s f o r t h e e x p e c t e d e r r o r p r o p o r t i o n a l t o v e l o c i ty a n d ~ s t a t i c a l l o w s
f o r f ri c t io n i n d u c e d e r r o r s a n d a r e a s o n a b l e l e v e l o f a ll o w a b l e a c c e l e r a t i o n . T h e s t a t e
l i n e i s a l l o w e d t o r e t u r n t o a h i g h l e v e l o n c e t h e a c t u a l e r r o r i s l e s s t h a n t h e a l l o w a b l e .
T h e p r o c e s s d e s c r i b e d a l l o w s t h e m o d u l a t i o n o f a x is v e lo c i ti e s i n a c o o r d i n a t e d f a s h io n
a n d e f f e ct i v e ly r e d u c e s t h e f r e q u e n c y o f t h e r e f e r e n c e p o s i ti o n c o m p o n e n t s .
T h e v e l o c i t y u s e d t o c a l c u l a t e th e a l l o w a b l e e r r o r w i t h i n t h e c o n t r o l l e r i s a r e f e r e n c e
v e l o c i t y w h i c h i s c a l c u l a t e d b y s p li n i n g t h e f i rs t s t a g e i n t e r p o l a t i o n i n c r e me n t s . T h ea p p r o a c h u s e d h e r e i s d i f f e re n t f r o m t h a t i m p o s e d b y t h e p o s i t i o n s p l in e s i n ce o n e
w i s h e s t o a v o i d d i s c o n t i n u i t i e s i n t h e v e l o c i t y . T h e v a r i a t i o n i n v e l o c i t y a ll o w e d i s a g a i n
l i n e a r a n d i s s h o w n i n F i g . 3 . T h e a p p r o a c h s h o w n i n F i g . 3 c o mp r i s e s f i x i n g t h e
c o m m a n d v e l o c i ty a t t h e j u n c t i o n o f tw o f ir st s ta g e i n t er v a ls t o t h e a v e r a g e o f t h e
v a l u e s o v e r t h e t w o i n c r e m e n t s . I t t h u s t a k e s t w o m a s t e r s a m p l i n g i n t er v a ls t o a c c e l e r a te
f r o m z e r o t o a c o n s t a n t v e l o c i t y . T h e v e l o c i t y s p l i n e i s d e s c r i b e d ma t h e m a t i c a l l y i n
e q u a t i o n ( 5 ) . T h e v e l o c i t y s p l in e i s n o t e q u a l t o t h e d e r i v a t i v e o f t h e p o s i t i o n s p l i n e
a n d i n f a c t i f o n e i n t e g r a t e d t h e v e l o c i t y s p l i n e t h e d i s t a n c e s tr a v e l l e d w o u l d n o t
c o r r e s p o n d t o t h o s e r e q u i r e d . T h e s p l i n e i s u s e d t o c a l c u l a t e a l l o w a b l e e r r o r , w h i c h
i n t u r n i s u s e d t h r o u g h t h e s t at e li n e t o s m o o t h a n d e x t e n d t h e t i m e d o m a i n c o m m a n d
signal .
x t ]V(t) = ( X i + 1 - X i _ l ) --b ( X i + 2 - X i + 1 - X i - -[ - i - l ) ~ • (5)
T h e m o s t o b v i o u s a p p r o a c h t o t h e u s e o f t h e s t at e l in e f o r e r r o r c o n t r o l w o u l d s e e m
t o b e t h e u s e o f a n e r r o r c r i t er i o n i n th e f o r m ,
l e a . o w a b d 1 4 V I + 8 s t a t ic . ( 6 )
T h e c r i t e r i o n a b o v e a l l o w s a n e r r o r b a n d a r o u n d t h e a c t u a l p o s i t i o n , a n d r e s u l t s i nt h e s t a t e l i n e b e i n g t r i g g e r e d w h e n t h e a c t u a l p o s i t i o n i s l e a d i n g t h e r e f e r e n c e p o s i t i o n .
S u c h a n a p p r o a c h f o r c e s t h e s y s t e m t o s lo w d o w n m o r e t h a n n e c e s s ar y . A s ig n s e n si ti v e
e r r o r c r i t e r i o n m a y b e f o r m u l a t e d a s a n a l t e r n a t i v e a s f o l l o w s ,
8
- - - - - V e l o c i t y s p l i n e
Fig. 3. Velocity spline.

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 5/16
Regulation of Position Er ro r in Contouring Systems 717
s i g n ( V ) e a l l o w a b l e < s ign(V ) cb V + ~ s t a t i c • ( 7 )
T h e e x p e r i m e n t a l r e s u lt s w h i c h f o ll o w in s e c t i o n 3 u s e t h e c r i te r i a in e q u a t i o n ( 7 ) ,
t h e v a l u e o f p h a s e u s e d i s t h e s a m e a s w o u l d r e s u l t f r o m t h e t y p e 1 s y s t e m , u s e d i n
r e s p o n s e t o a r a m p i n p u t [ s e e e q u a t io n ( 3 ) ] . T h e s e l e c ti o n o f a v a lu e f o r t h e c o n s t a n t
i n t he c r i t e r i a i s m ore com pl ex , t he t o rq ue ava i l ab l e a t s t ands t i l l m us t c l ea r l y exceeda n y f r ic t io n a l lo a d s , h o w e v e r a t t h e s a m e t im e o n e w i s h e s t o h a v e t h e s y s t e m r e s p o n d
t o r a p i d c h a n g e s in i n p u t ( e i t h e r i n r e f e r e n c e o r d i s tu r b a n c e ) . T h e r e q u i r e m e n t to
a l l ow h i gh va l ues o f acce l e ra t i on , even w hen t he ve l oc i t y i s l ow , l e ads t o t he no t i on
o f d e t e r m i n i n g t h e v a l u e o f ~ s t a t i c i n t he fo l low i ng f a sh i on ,
1~ s t a t i c = , ~ r n a x K Ka (8 )
T h i s l e ads t o t he exp re s s i on fo r t he t o t a l va l ue o f a l l ow ab l e e r ro r a s fo l l ow s ,
b Ktsaea l low ab l e - - V ~ - -I - ~s ta t ic = V
1
a K K e + Ima~ K K a (9 )
2.4. Th e in f luence oJ: the s ta te line approach on dyn am ic perform anc e
T he sys t em w i t h t he s t a t e l i ne i nac t i ve s i m p l y ac t s a s a no rm a l s e rvo sy s t em . In
t h o s e c a s e s w h e n t h e a c t u a l e r r o r s u r p a s s e s t h e a l l o w a b l e e r r o r , t h e s y s t e m s t r u c t u r e
is a l t e r e d , a n d i t b e c o m e s n e c e s s a r y to e x a m i n e d y n a m i c r e s p o n s e a n d s ta b il it y .
I f o n e a s s u m e s t h a t t h e s t a t i c e r r o r , ~ s t a t i c ) , i s sm a l l , t hen acco rd i ng t o eq ua t i on
( 9 ) , t h e e r r o r m u s t b e ,
s R s) b KtsaE ( s ) - a K K e (10 )
t h e n t h e v e l o c it y e r r o r c a n b e e x p r e s s e d i n t h e f o l lo w i n g f o r m ,
E l ( s ) = s R ( s ) b K t s a ( s + a ) S O ( s ) K t s aa K e ( s + b ) K e (11 )
t h e o u t p u t o f t h e s y s t e m i s t h e n ,
K a K t K eO ( s ) = E l ( s ) ~ - s i (12 )
and t he r e su l t i ng c l o sed l oop t r ans fe r func t i on i s g i ven by
K a K t b K t sa ( s + a )F(s) = . ( 1 3 )
a ( s + b ) ( J e s + K a K t K t s a )
S i nce b , J e , K t s a , K a a n d K t a re a l w ays pos i t i ve , t he sy s t em w i l l a l w ays be s t ab l e .
I t is in t e r e s t in g t o n o t e t h a t t h e s y s t e m p e r f o r m a n c e is i n d e p e n d e n t o f t h e c o m p e n s a t o r
g a i n , K a n d t h a t t h e s Ys te m b e c o m e s a s i m p l e la g w h e n t h e C o m p e n s a t o r is u s e d t o
cance l exac t l y t he ve l oc i t y l oop .
2.5. Th e se lect ion o f appropr ia te sys tem parameters
T h e r e a r e a n u m b e r o f p a r a m e t e r s w h i c h m u s t b e s e t to r e a s o n a b l e v a lu e s if t h e
s t a t e l ine app roac h d esc r i bed he re i s t o be succes s fu l. A s i n al l sy s t em s , t he com pen sa t i ng
f i lt e r m u s t be '. cons i d e red . In t h i s c a se ho w e ve r t he se l ec t i on o f s am p l i ng / i n t e rpo l a t i on

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 6/16
7 18 R . J . S e e t h a l e r a n d I . Y e i l o w l ey
i n t e rva l s and t he co e f f i c ien t s i n t he e r ro r c r i t e r i on u sed t o t r i gge r t he s t a t e l i ne a r e
e q u a l l y i m p o r t a n t .
2.5.1. S a m p l i n g t i m e s . F or t he ve l oc i t y sp l i ne t o have any poss i b i l i t y t o g i ve
sa t i s f ac t o ry r e su l t s , i t is neces s a ry to ch oose a m as t e r s am p l i ng ti m e t ha t a l l ow s t he
s y s t e m tw o f ir st s ta g e i n t e r p o l a t io n p e r i o d s t o s l o w d o w n f r o m m a x i m u m s p e e d t o z e r o
speed , t hus ,
V m a x
N - (14)2 amax A T
w h e r e V m~x s t h e m a x i m u m t r a v e r s e v e l o c it y , am a x is t h e m a x i m u m r e q u i r e d a c c e l e r-
a t io n , A T is t h e s e c o n d s t a g e i n t e r p o l a ti o n s a m p l in g p e r i o d a n d N i s th e n u m b e r o f
second s t age s t eps t aken fo r each f i r s t s t age i n t e rpo l a t i on i nc rem en t .
2.5.2. C o m p e n s a t o r p a r a m e t e r s . T h e s e r v o l o o p c o n t a i n s a l e a d l a g c o m p e n s a t o r
t ha t m us t be u t i li s ed t o m a t ch t h e ga i n s o f a l l axes . T he se rvo l oop i t s e l f is a t h i rd
o r d e r s y s t e m . It is f o u n d t h a t g o o d p e r f o r m a n c e is a t ta i n e d w h e n t h e c o m p e n s a t o rl ead i s u sed t o cance l t he ve l oc i t y l oop , t h i s r eq u i r e s t ha t [ s ee eq ua t i on (13 ) ] ,
K t sa K a K t
a - Je (15 )
T h e p h a s e l ag b e t w e e n t h e r e f e r e n c e a n d t h e a c t u a l p o s i ti o n i s t h e s a m e f o r a l l a x e s
a n d s h o u l d w i t h i n m o s t s y s t e m s b e c o m p a r a b l e t o t h e t i m e c o n s t a n t o f t h e v e l o c i t y
l o o p w h i c h h a s b e e n c a n c e l l e d , t h u s ,
b = d~ K K a K t K e (16 )J e
T h e n e x t p a r a m e t e r t o b e c h o s e n i s t h e c o m p e n s a t o r g a i n w h i c h w i l l b e r e l a t e d t o
t h e a l l o w a b l e e r r o r s . I f o n e f o l l o w s t h e a r g u m e n t g i v e n e a r l i e r a n d a l l o w s m a x i m u m
t o r q u e t o b e d e v e l o p e d a t z e r o v e l o c it y t h e n t h e g a in o f t h e c o m p e n s a t o r i s u n i q u e l y
d e f i n e d , [ s e e e q u a t i o n ( 9 ) ] , a s
m a xm
K - ~ s t a t i c Ka (17 )
T h e s e l e c t i o n o f t h e f i l t e r p a r a m e t e r s i n t h e m a n n e r d e s c r i b e d a b o v e , l e a d s t o a
s i m p le s e c o n d o r d e r s y s t e m w i t h u n d a m p e d n a t u r a l f r e q u e n c y a n d d a m p i n g r a t i o g i v en
by t he fo l l ow i ng exp re s s i ons ,
o . = ( 1 8 )
~ = ~ J ( ~ ) . ( 19 )
3. T H E E X A M I N A T I O N O F S Y ST E M P E R F O R M A N C E
A h i g h p e r f o r m a n c e s e r v o s y s t e m w a s c h o s e n t o e x a m i n e s y s t e m p e r f o r m a n c e . T h e
exp e r i m en t a l appa ra t u s cons i s ts o f a con t ro l l e r , PWIV l am p l i f ie r s , and h i gh pe r fo r m an ce
b r u s h e d p e r m a n e n t m a g n e t d . c . s e r v o m o t o r s . T h e s e r v o m o t o r s a r e e q u i p p e d w i t h
t a c h o m e t e r s a n d t w o t r a c k 1 0 00 li n e e n c o d e r s . T h e t a c h o m e t e r s ig n a ls a r e f e d b a c k t o
t he am p l i f i e r s w h i l e t he encode r s i gna l s a r e u t i l i s ed by t he con t ro l com pu t e r . F i gu re

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 7/16
Regulation Of Position Error in Contouring Systems 719
[ ]" Actuatoromputer controller [ Amplifier [
Required
position +/
[BLUI }
t __
Digital filter D/A Converte~ Curren t Torque
~ _ _ ._ . . . I . . . . . . . .
P l - - ; : ; o ; . . . . .
I I ~ Actuator speed
Actual position [BLU]
Encoder
_ ~ position
[BLU]
Fig. 4. Schematic block diagram of position loop.
4 shows a sc,hem a t i c b l ock d i ag ram o f a s i ng l e ax i s o f t he sy s t em and T ab l e 1 g i ves
t h e v a l u e s o f t h e v a r i o u s c o n s t a n ts w i t h in t h e s y s t e m .
T h e f ir st p h a s e o f t h e w o r k c o n c e r n e d w i th t h e e v a l u a t io n o f n e w c o n t r o l s tr a t e g ie s ,
i n v o lv e d t h e c r e a t i o n o f a r e a li s ti c si m u l a ti o n m o d e l o f t h e s y s t e m . T h e p r o g r a m t h a t
w a s d e v e l o p e d a ll o w s t h e e x a m i n a t io n o f th e p a t h p e r f o r m a n c e o f a n a r b it r a r y n u m b e r
o f a x e s a n d t h e i n t r o d u c t i o n o f n o n l i n e a r i n f l u e n c e s . T h e m a j o r n o n l i n e a r i t y i n t h e
bas i c sy s t em com pr i se s t he cu r r en t l i m i t o f t he am p l i f i e r , w h i ch i s i nc l uded i n t he
s i m u l a ti o n . T h e o r d i n a r y d i f f e r e n t ia l e q u a t i o n s c o r r e s p o n d i n g t o t h e a n a l o g p a r t o f t h e
l o o p w e r e s o l v e d u s i n g a s e c o n d o r d e r R u n g e - K u t t a a l g o r i t h m , w h i l e t h e t i m e d o m a i n
eq ua t i ons o f t he d i g i t a l pa r t ( i nc l ud i ng t he s t a t e l i ne ) , w e re so l ved d i r ec t l y . T he
v a l u e s o f t h e v a r i o u s p a r a m e t e r s i n t h e m o d e l w e r e c h o s e n t o c o r r e s p o n d t o t h e h i g h
p e r f o r m a n c e e x p e r i m e n t a l s e r v o s y s t e m , w h i c h w a s a l s o c o n s t r u c t e d a n d t e s t e d t o
v a l i d a t e t h e r e s u l t s f r o m t h e s i m u l a t e d m o d e l . R e s u l t s f r o m t h e e x p e r i m e n t a l s y s t e m
are g i ven i n t he nex t s ec t i on .
T h e m a j o r i t y o f t h e s i m u l a ti o n s h a v e b e e n c o n c e r n e d w i t h c o r n e r t r a c k i n g c a p a b il it y .T h e p a t h c h o s e n r e q u i r e s o n e o f th e s e r v o s to c h a n g e d i r e c ti o n , w h il e th e s e c o n d m a y ,
i n e s senc e , con t i nue a t cons t an t ve l oc i ty . M os t o f t he s i m u l a t ions o f t h is r a t h e r d i f fi cu lt
c o n t o u r h a v e u s e d a n o m i n a l s p e e d o f 5 00 r p m ( o n e m o t o r w ill t h u s r e v e r s e to - 5 0 0 r p m
d u r i n g t h e c o r n e r ) a n d 1 0 0 0 r p m . F i g u r e s 5 a n d 6 s h o w e n l a r g e m e n t s o f t h e s i m u l a t e d
s y s t e m p e r f o r m a n c e ( 5 00 r p m a n d 1 0 0 0 r p m ) . B o t h f ig u r es d e m o n s t r a t e t h e l a r g e
o v e r s h o o t t o b e e x p e c t e d w i t h t h e s y s t e m w i t h o u t t h e s t a te l i n e a c ti v a te d . T h e s y s t e m
w i t h s t a t e l i ne ac t i va t i on e s sen t i a l l y co r r e sponds t o t he t heo re t i ca l s econd s t age i n t e r -
p o l a t e d p a t h t h r o u g h t h e c o r n e r .
Table 1. Experimental parameters
Name Symbol Value Units
Motor torque constant Kt 0.2967Motor inertia Je 0.9636e-3Tachometer feedback Ktsa 0.047Encoder gain Ke 636.6198Maximum current /max 10Maximum speed omax 2000Amplifier gain Ka 13.6136Amplifier bandwidth fCmp~or >750D/A converter gain Kd 0.0049Filter gain Kp 34.1333Filter lead parameter A 0.9
Filter lag parameter B -0.333Master sampling period At 16Slave sampling period AT 0.5Position loop ramp phase lag qb 3Position loop static error 8static 5Position loop natural frequency o~ 666.67Position loop damping ratio ~ 1
N m A
N m s
V/ rad/sec)BLU/radA-rpmA/VHz
msecmsecmsecBLUrad/sec

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 8/16
7 2 0 R . J . S e e t h a l e r a n d I . Y e l l o w l e y
3300E n l a r g e m e n t o f o r n e r t r a c k i n g a t 5 0 0 R P M
o o3200 ~ . ~ o o
~e 'l \ , , o
3 1 0 0 - . o / \ t ,. e / ~ ' \ , o
- .o V , ~ . , , o
i ~ o
2,002 00. / i f / ~ , , . o
o
2600
25000° , I i i I i i \ i2600 2800 3000 3200 3400 3600 3800 4000
T h e t a 1 [ B L U ]
F i g . 5 . S i m u l a t e d p a t h s i n c o r n e r t r a c k i n g a t 5 0 0 r p m : , r e f e r e n c e p o s i t i o n ( f i r s t s t a g e i n t e r p o l a t i o n ) ;
- - - , r e f e r e n c e p o s i t i o n ( s e c o n d s t a g e i n t e r p o l at i o n ) ; o o o , a c t u al p o s i t io n o f s i m p l e s e r v o s y s t e m a n d
* * * , a c t u a l p o s i t i o n o f s y s t e m w i t h a c t i v e s t a t e l i n e .
E n l a r g e m e n t o f c o r n e r t r a c k i n g a t 1 0 00 R P M1.45.l o o
o oo o
1 . 4 0 0 0
~ m ~ t 0~ O
y
< _ / / ,~,~ 1.30 2 ~ 0
, , o
1.25 ~ 1
i 20 I I I I I I I I
1 .25 t . 3 0 . 3 5 1 .40 I A5 1 .50 1 .55 1 .60 1 .65 1 .70 135
T h e t a 1 [BLU] x 104
F i g . 6 . S i m u l a t e d p a t h s i n c o r n e r t r a c k i n g a t 1 0 0 0 r p m : , r e f e r e n c e p o s i t i o n ( f i r s t s t a g e i n t e r p o l a t i o n ) ;
, r e f e r e n c e p o s i t i o n ( s e c o n d s t a g e i n t e r p o l a t i o n ) , o o o , a c t u al p o s i t io n o f s i m p l e s e r v o s y s t e m a n d
• * * , a c t u a l p o s i t i o n o f s y s t e m w i t h a c t i v e s t a t e l i n e.
4 . E X P E R I M E N T A L V E R I F I C A T I O N
E x p e r i m e n t s h a v e b e e n c o n d u c t e d u s i n g t h e s y s t e m d e p i c t e d i n F i g . 2 . T h e f i r s t
s e r ie s o f e x p e r i m e n t s h a v e e x a m i n e d t h e p r o f il in g o £ t h e c o n t o u r s h o w n in F i g. 7 ,
w h i c h in c l u d e s t w o s h a r p c o m e r s , a s w a s t h e c a s e i n th e s i m u l at i on . T h e e x p e r i m e n t
w a s c o n d u c t e d a t n o m i n a l s pe e d s o f 5 0 0 a n d 1 0 0 0 r p m . T h e a c tu al p e r f o r m a n c e o f t h e
s y s t e m i n t r a ve r si n g t h e f i rs t c o r n e r w i t h a n o m i n a l s p e e d o f 5 0 0 r p m i s s h o w n i n F i g.
9 . I t s h o u l d b e n o t e d t h a t th e m e t h o d o f g a t h e r in g d a ta i n v o lv e s t h e c a lc u l a t i o n o f
r e f e r e n c e p o s i ti o n t h r o u g h t h e a d d i ti o n o f e r ro r t o c u r r e n t p o s i ti o n . T h i s p r o c e s s i s
c a r d e d o u t a t t h e m a s te r a n d m a y i n s o m e c i r c u m s t a n c e s b e o u t , o f p h a s e b y o n e p e r i o d
( 0 . 5 m s e c ) . T h i s i s t h e r e a s o n f o r t h e r at h e r c h o p p y p r o f il e o f t h e r e f e r e n c e p a t h d a t a .
T h e m a x i m u m p a th e r r o r w i t h t h e s t at e li n e a c t iv a te d i s le s s th a n t w o d e g r e e s , i n
c o n t r a s t t h e p a th t a k e n b y t h e b a s e s y s t e m ( n o s t at e li n e a c t i va t io n ) i s sh o w n i n F i g .
8 a n d d i s p l a y s a p p r o x i m a t e l y 2 6 d e g r e e s o f p a t h e r r o r .

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 9/16
R egu la t i on o f Pos i t i on E rror in C ontou r ing S ys t em s 721
150
10~
50o
0
o,.C
F-, - 50 -
-100 -
-150-100
X - Y Pos i t i on
/ \ \ . \
I I 1 I I ~ "" I I0 1130 200 30 0 400 500 600
T h e t a I [ d e g ]
700
Fig. 7. C orner t ra ck ing w i th a s im p le s e rv o contro l le r : s o l i d , m a s ter p os i t i on sp line ; da shed , r e f e renc ep os i t i on a nd da sh -dot , a c tu a l p os i t i on .
E n la rgem ent o f con tou r ing pa th
o f s im p le s e rv o at 500 RPM
15 0[ / / ~
1/ \
145F / \
/ / / ~ \ \o
.~. tual path \140 \
o
135 \
\R e ference p a th \ \
\ \13o I I \ I \
6 0 8 0 100
x - D i r e c t i o n [ d e g ]
Fig. 8. E nla rgem en t o f co m e r t ra ck ing s e rvo w i th ou t s ta t e l ine a c t i v a ti on a t 5 0 0 rpm : so l i d , r e f e renc e p os i t i ona nd da shed , a c tu a l p os i t i on .
T h e c o r r e s p o n d i n g s i t ua t io n w i t h a n o m i n a l s p e e d o f 1 0 0 0 r p m is s h o w n i n F ig s 1 0
a n d 1 1. I n t h Ji s c a s e t h e p a t h e r r o rs a re 7 d e g r e e s a n d 9 0 d e g r e e s f o r t h e s t a t e li n e a n d
n o n - s t a t e l i ne : b a s e d s y s t e m s , r e s p e c t i v e l y .
T h e a l g o r i t h m u s e d t o t ri g g er t h e s t a t e li n e i n t h e e x p e r i m e n t s i s th a t s h o w n i n
e q u a t i o n ( 7 ) . T h e i n f l ue n c e o f t h e s ta te l in e c l o si n g i s t o s l o w t h e s y s t e m d o w n as it
p a s s e s t h r o u g h t h e c o r n e r s , h o w e v e r t h e v a r i o u s a p p r o a c h e s t o s t a t e l i n e d o s i n g l e a d
t o v e r y d i f f e r e n t c o n t o u r i n g e f f i c i e n c i e s . T o b e s p e c i f i c , t h e c o n t o u r s h o w n i n F i g . 6 ,
h a s a t r a v e r s e t i m e o f 0 . 2 2 5 s e c u s i n g t h e s i m p l e n o n - s t a t e l i n e s y s t e m . T h e a d d i t i o no f t h e s t a t e l i n e s y s t e m v a s tl y r e d u c e s e r r o r , h o w e v e r i t i n c r e as e s t h e t r a ve r s e t i m e t o
0 . 2 8 5 s e c . T h e u s e o f t h e s i m p l e s t p o s s i b l e s t a t e l i n e s t r a t e g y , i n w h i c h t h e e r r o r i s
c o n s t r a i n e d t o b e l e s s t h a n a c o n s t a n t a m o u n t , l e a d s t o a c o n s i d e r a b l e s l o w i n g ( a
t r av e rs e t i m e o f a p p r o x i m a t e ly 0 . 6 8 s e c , w h e n t h e m a x i m u m e rr or is 3 0 B L U ) .
I t is b el ie v e .d t h a t t h e p e r f o r m a n c e i m p r o v e m e n t d e m o n s t r a t e d b y t h e s y s t e m i s f a ir ly
i m p r e s s i v e , g i i v e n t h e f a c t t h a t t h e a m p l i f i e r s a r e s a t u r a t e d d u r i n g t h e c o r n e r i n g o p e r -

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 10/16
7 2 2 R . J . S e e t h a le r a n d I . Y e l l o w l e y
, 5 o1 4 5 ~
u
.g
I
135
130
E n la rgem ent o f contou r ing p ath o fU B C contro l l e r a t 5 0 0 R P M
/f '
i i \ \6O 8O
x - D i r e c t i o n [(leg]
100
Fig. 9 . E nla rgem en t o f com er t ra ck ing o f s e rv o w i th s ta t e l i ne a c t i v a ti on at 5 0 0 rp m : so l i d , r e f e ren ce p os i t i ona nd da shed , a c tu a l p os i t i on .
E n la rgem ent o f contou r ing p ath o f s im p le s e rv o a t 1 0 0 0 R P M
7 0 0
6 8 0
660 / \
/ \g 640, \
~ 6 2 o i / \
~" 600 Actual path \
5 8 0
56O I I
3 4 5
x D i re c t i on deg ]
\\
\\
Fig. 10 . C lose -u p o f com er t ra ck ing w i thou t s ta te l i ne a c t i v a ti on at 10 0 0 rpm : so l i d , r e f e ren ce p os i t i on a ndda shed , a c tu a l p os i t i on .
a t io n . W h i l e t h e a c tu a l p e r f o r m a n c e o f a n y s y s te m i s h e a v i l y d e p e n d e n t o n t h e q u a l it y
a n d p e r f o r m a n c e o f t h e b a s i c c o n t r o l c o m p o n e n t s , t h e e v a l u a t i o n o f t h e s t a t e l i n e
s y s t em o n t h e b a s i s o f t h e s i m p l e p e r f o r m a n c e i n d i c a t or s h o w n i n e q u a t i o n ( 2 0 ) , w o u l d
l e a d o n e t o b e l i e v e t h a t i t i s r e l a t i v e l y s u c c e s s f u l , t h e i n d e x b e i n g 1 5 0 0 a n d 8 0 0 f o r
5 0 0 a n d 1 0 0 0 r p m , r e s p ec t i v e ly . ( T h e d i f f e r e n c e b e i n g a tt r ib u t a b le t o t h e m o r e s e v e r e
p r of i le r e q u i r e m e n t s a n d t h e l o n g e r p er i o d o f s a t ur a ti o n i n t h e c as e o f t h e h i g h e r
n o m i n a l v e l o c i t y .)
p a t h v e l o c i t y
"q - path e rror (2 0 )
T h e s e c o n d s e r i e s o f e x p e r i m e n t s w e r e c o n c e r n e d w i t h c i r c u l a r i n t e r p o l a t i o n a n d

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 11/16
Regulation of Position Erro r in Contouring Systems 723
Enlargement of contouring path ofUBC controller at 000 RPM
i f Actual path
g
5
x-Direction [degl
Fig. 11. Close-up of co rner tracking with state li ne activation at 1000 rpm : solid, reference position anddashed, actu al position.
h e n c e r e l a t e d t o f r e q u e n c y r e s p o n s e . T h e s t a te l in e s y s t e m o f c o u r s e w il l n o t e x h i b i t
t h e u s u a l f o r m o f f r e q u e n c y r e s p o n s e s i n ce a t h i g h e r f r e q u e n c i e s it w ill s t r e tc h o u t
p e r i o d s o f h i g h a c c e l e r a t i o n t o a v o i d e r r o r . B e f o r e c o n t i n u i n g t o a c o n s i d e r a t i o n o f
t he sy s t em pe r fo rm ance i t i s a s w e l l t o exam i ne t he cons t r a i n t s w h i ch app l y t o t h i s
p a r t i c u la r m o d e o f i n te r p o l a t io n .
T h e m o s t o b v i o u s c o n s t r a i n t o n a n y c i r c u l a r i n t e r p o l a t i o n s y s t e m i s s e t b y t h e
i n t e r p o l a t o r i ts e lf , w h i c h m u s t e n s u r e t h a t t h e m a x i m u m p o s i ti o n e r r o r ( r e f e r e n c e t o
t heo re t i ca l ) , : is l e ss t han 1 B L U , see F ig . 12 . F o r t he t w o s t age i n t e rpo l a t i on sy s t em
used he re , i t ha s been show n [ 9 , 10 ] , t ha t
J 4 2 . 6 6 6 7 ]2~r A tfm~ x = V \ ~ / (21 )
T h e m a x i m u m f r e q u e n c y o f c ir c u l a r i n t e r p o l a ti o n is t h u s r e l a t e d t o t h e r a d i u s a n d
t h e f ir st s ta g e i n t e r p o l a t i o n t i m e . T h e m a x i m u m a l l o w a b le v e l o c i ty o f t h e s y s t e m a l so
p l a c e s a l i m it o n t h e m a x i m u m a l l o w a b l e f r e q u e n c y o f ci r cu l a r i n t e rp o l a t io n . A c c o r d i n g
t o S e e t ha l e r [111 ] t h i s l e ads t o t he fo l low i ng con s t r a i n t ,
O~max= 2"tr m~x rma x. (22 )
T he t h i rd and f i na l m a j o r cons t r a i n t i s t ha t due t o cu r r en t s a t u ra t i on o f t he am p l i f i e r .
I n t h i s c a s e t h e m a x i m u m t o r q u e a n d a c c e l e r a t io n a r e l im i t e d le a d i n g t o t h e f o l lo w i n g
HTH 38 6 E
U
Fig. 12. C ircular interpolation.

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 12/16
7 2 4 R . J . S e e t h a l e r a n d I . Y e l l o w l ey
6
~ 5o -4
3
R a d i u s v s f r e q u e n c y
~ x
I - I I I I L I I I I . . . . .00.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
R a d i u s [ B L U ] x 1 0 4
F i g . 1 3. M a x i m u m r a d i u s v s m a x i m u m f r e q u e n c y : d o t t e d l i n e , l im i t i n g v e l o c i t y c o n s t r a i n t ; d a s h e d l i n e ,l i m i t i n g a c c e l e r a t i o n c o n s t r a i n t a n d s o l i d l i n e , p o s i t i o n s p l i n e c o n s t r a i n t .
Otmax m / m a x g t ~ e e = ( 2 ~ r f m a x ) 2 r m a x . ( 2 3 )
T h e r e la t iv e i m p o r t a n c e o f t h e t h r e e c o n s t r a in t s f o r t h e s y s t e m u n d e r c o n s i d e r a t io n
a r e s h o w n i n F ig . 1 3 . I t i s s e e n t h a t t h e m a x i m u m v e l o c i t y c o n s t r a i n t i s o n l y a c t i v e a t
l o w f r e q u e n c i e s a n d l a r g e r ad i i . F o r t h e s y s t e m u n d e r c o n s i d e r a t i o n w i t h a sl a v e
s a m p l i n g t i m e o f 0 . 5 m s e c a n d a m a s t e r s a m p l i n g t i m e o f 1 6 m s e c , t h e t w o c o n s t r a in t s
mee t a t r e f i t = 5 90 0 B L U a n d r e f i t = 2.9 Hz . A t r ad i i l e s s than r ef it the po s i t ion sp l ine
i mp o s e s t h e d o m i n a n t c o n s t r a i n t . A t r a d ii h i g h e r th a n t h e c r it ic a l r a d i u s , c u r r e n ts a t u r a ti o n i s d o m i n a n t . ( N o t e t h e s t a t e l in e c a n n o t i m p r o v e t h e s i tu a t io n i f t h e p o s i t i o n
s p l i n e c o n s t r a i n t i s v i o l a t e d . )
I f o n e a t t e m p t s t o u s e r e f e r e n c e c o m m a n d s a l o n g t h e p o s i t io n s p l in e c o n s t r ai n t f o r
r a d i i la r g e r t h a n r ef it, t h e s t a t e l i n e s h o u l d p u l l t h e a c t u a l r e s p o n s e d o w n t o t h e l i m i t in g
a c c e l e r a t i o n c o n s t r a i n t l i n e . T h i s m e a n s t h a t t h e o u t p u t f r e q u e n c y w i l l b e r e d u c e d ,
h o w e v e r c l e a r l y c o n s i d e r a b l e d i s t o r t i o n o f t h e t i m e d o m a i n w a v e f o r m w i l l r e s u l t ( t h e
a x e s w i l l s t i l l b e c o o r d i n a t e d ) .
T w o e x p e r i m e n t s h a v e b e e n c o n d u c t e d , i n t h e f ir st a f e e d r a t e h a s b e e n c h o s e n w h i c h
w i ll n o t s a t u r a t e t h e s y s t e m . D u r i n g t h e c o u r s e o f th e f i rs t e x p e r i me n t , t e n c i rc l e s w e r e
c o n t o u r e d a n d t h e t h i r d i s s h o w n i n F i g s 1 4 a n d 1 5 . T h e s t a t e l i n e i s n o t a c t i v a t e d i n
t h e s e e x p e r i m e n t s . T a b l e 2 g i v e s t h e p e r t i n e n t g e o m e t r i c p a r a m e t e r s .F i g u r e 1 4 sh o w s t h e a c t u a l p a t h d u r in g t h e l o w f e e d r a t e e x p e r i m e n t . T h e s y s t e m is
a b l e t o f o l l o w t h e c o n t o u r w e l l . N o s t a t e l i n e i s . n e e d e d , b e c a u s e t h e s a t u r a t i o n l im i t
i s n o t r e a c h e d . T h e a c t u a l p a t h e r r o r f o r m e d f r o m c o n s i d e r a t i o n o f e r ro r s o n e a c h
a x i s , i s s h o w n i n F i g . 1 5 , f r o m w h i c h i t i s s e e n t h a t t h e ma x i mu m v a l u e o f a x i s e r r o r
i s a p p r o x i m a t e l y 4 5 B L U s .
I n t h e s e c o n d e x p e r i m e n t , t h e f e e & a t e w a s c h o s e n s u c h t h a t c u r r e n t s a t u r a t i o n a n d
t h e m a x i m u m r e q u i r e d s p e e d w o u l d m a k e i t i m p o s s i b l e f o r t h e s i m p l e s e r v o ( w i t h o u t
s t a t e li n e a c t i v a t i o n ) t o f o l l o w t h e p a t h . T a b l e 3 s h o w s t h e p a r a m e t e r s f o r th i s e x p e r -
i me n t .
T a b l e 2 . P a r a m e t e r s f o r l o w f e e d r a t e c ir c u l a r i n t e r p o l a t i o n
N a m e V a l u e U n i t s
F r e q u e n c y 3 H z
R a d i u s 5 0 00 B L U
F e e d r a t e 9 42 48 B L U / s e c

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 13/16
,.d
no
4O
30
I
-101-
R e g u l a t i o n o f P o s i ti o n E r r o r i n C o n t o u r i n g Systems
Path du r ing c i r cu la r in te rpola t ion6O O O
Z (-4OOO
-60001 I I I I 1 I I I I-5 0 00 - 4 0 0 0 - 3 0 0 0 - 2 0 0 0 - 10 0 0 0 1 0 00 2 0 0 0 3 0 0 0 4 0 0 0
x- A xis [BLU]
Fig . 14 . Pa th of low f ee&ate c i r cu la r in te r pola t ion exper iment .
-20
-30
- 4 0
-5135 t o 1 5 2 0 2 5 3 0 3 5 4 0 4 5
5000
Pa th e r r or d ur ing c i r cu la r in te r pola t ion
S a m p l e s
Fig . 15 . Pa th e r r or o f s e r vo sys tem dur in g low f eedr a te exper imen t .
Table 3 . Pa r am ete r s f or h igh f eedr a te c i rcu la r in te r pola t ion
725
N a m e V a l u e U n i t s
F r e q u e n c y 3 H zR a d i u s 8 0 00 B L UFeed r a te 150796 BLU /sec
1:0000
Pa th dur ing c i r cu la r in te r pola t ion
,.-1
m
8000
7 0 0 0 -
6 0 0 0 -
5 0 0 0 - i ~4 0 0 0 -
3111111-
I 0 0 00 2o00 400o 6000 8ooo Ioooo t2000
x- A xis [BLU]
Fig ; . 16 . P a th of the s imple se r vo sys tem du r ing the h igh f eedr a te exper imen t .
F i g u r e 1 6 s h o w s t h e a c t u a l p a t h d e s c r i b e d b y t h e t w o a x e s d u r in g t h e h i g h f e e d r a t e
exp e r i m en t u s i ng t he se rvo sy s t em s w i t hou t s t a t e l ine ac t i va ti on . T h e sy s t em i s no t
a b l e t o f o l lo w t h e r e f e r e n c e p a t h , b e c a u s e a c c e l e r a t io n le v e ls h a v e d r i v e n t h e a m p l if ie r s
i n to s a t u r a t io n , a n d t h e r e q u i r e d v e l o c i ty e x c e e d s t h e m a x i m u m v e l o c i ty o f t h e a c t u a t o rs .

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 14/16
7 2 6 R . J . S e e t h a l e r a n d I . Y e l l o w l ey
8 0 0 0
6 0 0 0 i
4000 ̧
20oo
m om
-2000
~ -4ooo
-6000
-8000
P a t h d u r i n g c i r c u l a r i n t e r p o l a t i o n
450 00 -4000 -2000 2000 4000 6000 8000
x - A x i s [ B L U I
F i g . 1 7. P a t h o f s e r v o s y s t e m w i t h a c t i v e s t a t e l in e d u r i n g h i g h f e e d r a t e e x p e r i m e n t .
P a t h e r r o r d u r i n g c i r c u l a r i n t e r p o l a t i o n60
4O
20
0m
-2o
~ . 4 o
. 6 0 -- g o
I 0 2 0 3 0 40 50 60 7 0 8 0 9 0 1 0 0
S a m p l e s
F i g . 18 . P a t h e r r o r o f s e r v o s y s t e m w i t h a ct i v e s t a t e l in e d u r i n g h i g h f e e & a t e e x p e r i m e n t .
F i g u r e 1 7 s h o w s t h e p a t h d e s c r i b e d b y t h e s a m e t w o s e r v o s w i t h t h e s t a t e li n e a c t iv a t e d .
T h e a c t u a l p a t h e r ro r is s h o w n i n F ig . 1 8 a n d i s se e n t o h a v e a m a x i m u m v a l u e o f
7 8 B L U .
4.1. Traverse time and velocity fo r circular interpolation
W h i l e t h e s t a t e l i n e s y s t e m h a s b e e n s h o w n t o b e e f f e c t i v e i n c o n t r o l li n g e r r o r , i t i s
i n o r d e r t o e x a m i n e t h e e f f ic i e n c y w i t h w h i c h i t p e r f o r m s t h is f u n c t i o n . O f m o s t i n t e r e s t
i s a c o m p a r i s o n b e t w e e n t h e p e r f o r m a n c e o f th e r e a l t im e s y s t e m w i th t h e b e s t t h a t
c o u l d b e a c h i e v e d w i t h t h e a p p l i c a ti o n o f a d y n a m i c m o d e l , i n a p r e p ro c e s s i n g s t a g e .
T h e s e c t io n w h i c h f o l l o w s c al c u la t e s t h e t h e o r e t ic a l c h a n g e i n p e r i o d w h i c h w o u l dr e s u l t f r o m s u c h a p r o c e d u r e .
A
F i g . 1 9. I n f l u e n c e o f a c o n s t r a i n t o n t h e t i m e t a k e n t o t r a v e r s e a c i r c le .

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 15/16
R e g u l a t i o n o f P o s i t i o n E r r o r i n C o n t o u r i n g S y s t e m s 7 2 7
T a b l e 4 . E x p e E i m e n t a l v e lo c i t y mea su r ement s a nd c o mp a r i so n w i t h be s t a t t a i na b le in a p r ep r o c e s so r
O r i g i n a l f r e q u e n c y O r i g i n a l p e r i o d F i na l p e r i o d
( H z ) ( m s e c ) ( m s e c ) P e r i o d r a t i o C a l c u l a t e d p e r i o d r a t i o
333 333 1 1
250 250 1 1200 208 1 .04 1
167 189 1.13 1.13
2O
0
-20
LII
2 d o
i m e [ r e s e t]
1000
F i g . 2 0 . P a t h e r r o r f o r s e r v o w i t h n o sta te l ine ac t ivat ion ( 6 H z ) .
2 0
10
0
-Io
- 20
-30
-4C0 200 400 600 800 1000
T i m e [ m s e e l
F i g . 2 1 . P a t h e r r o r f o r s er v o sy s t em w i t h s t a t e l i ne a c t i v a t ed ( 6 H z ) .
D u r i n g c i r c u la r i n t e r p o la t i o n , w i t h a to r q u e c o n s t r ai n t , t h e c o n t o u r i n g v e lo c i t y m u s t
b e r e d u c e d a t f o u r p o i n t s . F i g u r e 1 9 b e l o w , s h o w s t h e p r o c e s s w h e r e o n l y a si n g l e ax i s
h a s s u c h a c o n s t r a i n t . T h i s f i g u r e s h o w s a s y s t e m f o l l o w i n g a s i n e w a v e w i t h a m p l i t u d e
A , t h e s y s t e m s t a rt s s l o w i n g d o w n a t t i m e t l . T h e t i m e r e q u i r e d t o tr a ve l f r o m t l t o
t h e m a x i m u m d i s p la c e m e n t i s l ab e l ed A t .
I n t h e e a s e w h e r e b o t h a x e s h a v e t h e s a m e c o n s t r a i n t ( a n d t h e s e d o n o t o v e r l a p ) ,
t h e r a t i o o f t h e a c t u a l p e r i o d t o t h a t p r o g r a m m e d i s g i v e n b y

8/12/2019 artigo de controle
http://slidepdf.com/reader/full/artigo-de-controle 16/16
728 R .J . See tha le r and I . Ye l lowley
R =2 q + 2 A t - ~ / 2 t o
rr/2to( 2 4 )
w h e r e :
t l = ls in - l (Imax Kt K elto \ to2 AJ e ]
( 2 5 )
A to cos( to t l )At - Ke ( 2 6 )
I m a x g t ~ e
A s e p a r a t e s e t o f e x p e r i m e n t s w a s c o n d u c t e d t o t r a c k c a r e f u l l y t h e t i m i n g o f t h e
c i rc u l ar i n t e r p o l at i o n . T h e s e u s e d t h e s a m e p a r a m e t e r s a s g iv e n i n T a b l e 1 . I t s h o u l d
h o w e v e r b e s a i d t h a t t h e a c t u a l a mp l i f i e r s u s e d w e r e d i f f e r e n t . I n t h i s n e w s e r i e s
f r e q u e n c i e s f r o m 4 t o 6 H z w e r e c h o s e n w i t h t h e r a d i u s s e t a t 2 00 0 B L U . T h e s e tt i n g
o f a v e r y a c c u r a te c u r r e n t l im i t w a s fo u n d t o p o s e s o m e c o n s i d e r a b l e p r o b l e m s ( in f a c t
t h e c u r r e n t l i m i t v a r i e s s l i g h t l y o n s o m e a x e s d e p e n d i n g u p o n d i r e c t i o n a n d t y p e o f
i n p u t ) . S i n c e t h e a c t u a l c u r r e n t l i m i t w i ll e x e r t a v e r y la r g e i n f lu e n c e o n t h e p e r f o r m a n c e
o f t h e s y s t e m , a mo r e r e a l i st i c a p p r o a c h w a s t a k e n a s f o l lo w s . T h e l im i t w a s s e t t o
a p p r o x i m a t e l y 1 5 A o n e a c h a x i s a n d t h e f r e q u e n c y o f ci rc u l ar i n t e r p o l a t io n i n c r e a se d
u n t il s a t u r a ti o n o c c u r r e d . T h e p e r f o r m a n c e a t a h i g h e r f re q u e n c y w a s t h e n e x a m i n e d
a n d c o m p a r e d w i t h th a t a c h i e v a b l e b y a p r e p r o c e s s o r . T h e d a t a a r e s h o w n i n T a b l e
4 . I t is s e e n t h a t t h e s y s t e m j u s t s a t u r a t e d a t 5 H z ; a t 6 H z , t h e r a t i o o f b o t h t h e s t a t e
l in e c o n t r o l l e d p e r i o d a n d t h a t w h i c h w o u l d h a v e b e e n a c h i e v e d b y a p r e p r o c e s s o r a r e
e q u a l a t 1 . 13 . T h e a c t u a l p e r f o r m a n c e i n c o n t r o l l i n g e r r o r i s d e m o n s t r a t e d i n F i g s 2 0
a n d 2 1 , w h e r e t h e e f f e c t i v e n e s s o f th e s t a t e l in e i s a g a i n e v i d e n t .
5 . C O N C L U S I O N S
A n e w a p p r o a c h t o t h e m i n i m i s a ti o n o f e r r o r i n c o n t o u r i n g i s p r o p o s e d ; t h e m e t h o d
i s b a s e d u p o n t h e c o n t r o l o f e r r o r a s a fu n c t i o n o f a p r e d i c t e d v e l o c it y . T h e m e c h a n i s m
u s e d t o c o n t r o l e r r o r i s t h e m o d u l a t i o n o f v e l o c i t y u s i n g a l o g i c l i n e ( s t a t e l i n e ) , w h i c h
i s w r i t t e n t o a n d r e a d f r o m b y e a c h a x i s s l a v e p r o c e s s o r w i t h in a n o p e n a r c h i t e c t u r e
c o n t r o l s y s te m . T h e s y s t e m h a s b e e n t e s t e d t h r o u g h s i m u l a ti o n a n d e x p e r i m e n t a n d
s h o w n t o p e r f o r m w e l l i n b o t h c o r n e r t r a c k i n g a n d c i r c u l a r i n t e r p o l a t i o n .
R E F E R E N C E S
[1] H. A . P ak , A dap t ive ma tch ing and p rev iew con t ro l l e r s fo r f e ed d r ive s yst ems , ASME Trans . J . EngngInd. 113, 316-320 (1991).
[2 ] M . To mizuka , Z e ro phas e e r ro r t r a ck ing a lgo r i thm fo r d ig i ta l con t ro l , ASME Trans. J . Dyn. Syst .Meas. Control 109, 65-68 (1987).
[3 ] J . B u t t l e r , B . Haack and M . Tomizuka , Re fe rence inpu t gene ra t ion fo r h igh s peed coord ina ted mot ionof a two axis sys tem, A S M E J. Dyn. Syst . Meas. Control 113, 67-74 (1991).
[4 ] M . W eck and G . Y e , S ha rp come r t r a ck ing us ing the IKF con t ro l s t r a t egy , A n n . C 1 R P 39, 437-441(1990).
[5 ] Y. Koren , C ros s -coup led b iax ia l comp ute r con t ro l fo r manufac tu r ing s ys t ems , ASME Trans . J . Dyn .Syst . Meas. Control 102(4) , 265-272 (1980).
[6 ] Y. Kore n and C . C . L o , V a r i ab le ga in c ros s -coup l ing con t ro l l e r fo r con tou r ing , A n n . C I R P 104,371-374 (1991).
[7 ] I . Ye l lowley and P . R . Po t t i e r , The in t eg ra t ion o f p roces s and geom e t ry w i th in an open a rch i t e c tu remach ine too l con t ro l l e r , Int . J. Mach. Tools Manufact. 34(2 ) , 277-293 (1994) .
[8 ] R . A rdek an i and I . Ye l lowley , The co n t ro l o f mu l t ip l e cons t ra in t s w i th in an open a rch i t e c tu re mach inetoo l con t ro l l e r , A S M E J . E n g n g I n d. (accep ted fo r pub l i c a t ion ) .
[9 ] I . Ye l lowley and P . P o t t i e r , A no te on a s imp le me thod fo r the improvem en t o f in t e rpo la t ion accu racyin a gene ra l pu rpos e , mu l t ip roces s o r ba s ed mot ion con t ro l l e r , Int . J. Mach. Tools Manu[act. ~ ( 2 ) ,287-292 (1989) .
[10 ] P . Po t t i e r , Advanced con t ro l l e r fo r mach ine too l s , M .Sc . Thes i s , M cM as te r Un ive rs i ty , Hami l ton ,On ta r io (1991) .
[11 ] R . S ee tha le r , A new con tou r ing a lgo r i thm fo r the UB C ccon t ro l l e r , M .Sc . Thes i s , Un ive rs i ty o f B r i t is hC o lumbia , C anada (1993) .