An Efficient Transmission Power Control Scheme for Temperature Variation in Wireless Sensor Networks
Upload
bedadipta-bainCategory
view
30download
0description

http://jvc.sagepub.com
Journal of Vibration and Control
DOI: 10.1177/1077546304042058 2004; 10; 1415 Journal of Vibration and Control
Anthony Green and Jurek Z. Sasiadek Dynamics and Trajectory Tracking Control of a Two-Link Robot Manipulator
http://jvc.sagepub.com/cgi/content/abstract/10/10/1415 The online version of this article can be found at:
Published by:
http://www.sagepublications.com
can be found at:Journal of Vibration and Control Additional services and information for
http://jvc.sagepub.com/cgi/alerts Email Alerts:
http://jvc.sagepub.com/subscriptions Subscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

Dynamics and Trajectory Tracking Control of aTwo-Link Robot Manipulator
ANTHONY GREENJUREK Z. SASIADEKDepartment of Mechanical and Aerospace Engineering, Carleton University,1125 Colonel ByDrive, Ottawa, Ontario, K1S 5B6, Canada
(Received 15 September 2002� accepted 23 May 2003)
Abstract: Operational problems with robot manipulators in space relate to several factors, most importantly,structural flexibility and subsequent difficulties with their position control. In this paper we present con-trol methods for endpoint tracking of a 12�6� 12�6 m2 trajectory by a two-link robot manipulator. Initially,a manipulator with rigid links is modeled using inverse dynamics, a linear quadratic regulator and fuzzylogic schemes actuated by a Jacobian transpose control law computed using dominant cantilever and pinned–pinned assumed mode frequencies. The inverse dynamics model is pursued further to study a manipulatorwith flexible links where nonlinear rigid-link dynamics are coupled with dominant assumed modes for can-tilever and pinned–pinned beams. A time delay in the feedback control loop represents elastic wave traveltime along the links to generate non-minimum phase response. A time delay acting on control commandsameliorates non-minimum phase response. Finally, a fuzzy logic system outputs a variable to adapt the con-trol law in response to elastic deformation inputs. Results show greater endpoint position control accuracyusing a flexible inverse dynamics robot model combined with a fuzzy logic adapted control law and timedelays than could be obtained for the rigid dynamics models.
Key Words: Robot control, flexible dynamics, assumed modes, fuzzy logic
NOMENCLATURE
A state matrixB control matrixC state measurement connection matrixc wave velocity (m s�1) (value 288.33)ci link centroidD direct transmission matrixd simulation delay time (ss)E Young modulus (Pa)E I flexural rigidity (N-m2)ex � ey position errors�ex � �ey velocity errorsFi generalized force
Journal of Vibration and Control, 10: 1415–1440, 2004 DOI: 10.1177/1077546304042058
��2004 Sage Publications
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1416 A. GREEN and J. Z. SASIADEK
G dynamic coupling matrixg gravitational acceleration vector (m s�2 ) (value 9.81)Hz frequency (cycle s�1) (value 1.0)J��� Jacobian of direct kinematicsJ linear quadratic regulator (LQR) performance indexJ energy (Joule)K stiffness matrixKd derivative gain matrixKp proportional gain matrixKi stiffness constant for ith linkKN normalizing gainkg kilogram� Lagrangian functionL link length (m) (value 4.5)M inertia matrixMkp k,p element of MMi generalized distributed mass for ith linkm metermi total mass of ith link (kg) (value 1.5075)m�x� mass as a function of distance x along linkN force (Newton)Pa pressure, stress (Pascal)p�x� t� distributed loadQ LQR weighting matrixqi generalized coordinatesR LQR weighting matrixr0�Ci link centroid position vectors secondss simulation step (value 0.001)T total kinetic energy (J)Te elastic kinetic energy (J)Tr kinetic energy for rigid links (J)td delay time (s)t time (s)U total potential energy (J)Ue elastic potential energy for flexible links (J)Ur potential energy for rigid links (J)u�x� t� flexural displacement functionx state variables vector�x state derivatives vectorxc commanded x-endpoint position (m)x actual x-endpoint position (m)yc commanded y-endpoint position (m)y actual y-endpoint position (m)z measurement output [z1 z2]T
�i j elastic deformation (m)
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1417
� damping ratio (value 0.707)� slew angle (rad)�� joint rate (rad s�1)� slew angle vector
joint rate vector� t link distal end angle of rotation (rad)� fuzzy logic system output parameter�ppi L pinned–pinned ith mode characteristic root ( i�)�ci L cantilever ith mode characteristic root (i – 0.5)�� mass per unit length (kg m�1)� mass per unit volume (kg m�3) torque vector control law [ 1 2]T
1 torque actuating link 1 (N-m) 2 torque actuating link 2 (N-m)i mode shape for ith mode�ci cantilever elastic frequency mode (Hz)�ppi pinned–pinned elastic frequency mode (Hz)
1. INTRODUCTION
Strict requirements exist for minimal vibration and precise control of long flexible robotsdeployed in spacecraft operations. To study the effects of direction change disturbances andmethods of controlling the resulting flexural vibrations, a square trajectory provides an idealcase for intense vibration effects requiring greater control effort at the four abrupt orthogonaldirection switches. For this purpose a 12�6 � 12�6 m2 trajectory was chosen as suitable fordemonstrating tracking control.
The same square trajectory was used by Banerjee and Singhose (1998), who obtainedexcellent results using an input shaping method coupled with an inverse kinematics controlscheme for both linear and nonlinear control laws, to simulate tracking control of a two-link robot manipulator and reduce residual vibrations. Their full-order flexible dynamicsequations were derived using a recursive order-n algorithm in which each robot link was dis-cretized into three rigid segments connected by torsion springs that are suitable for modelinglarge bending deformations. Their work prompted the investigations presented in this paper.Also, justification for the work presented in this paper lies in the desire to provide trackingcontrol accuracy for a model that closely represents actual flexible robot manipulator dy-namics without resort to discretization or linearization typically used in finite-element andstate-space formulations.
Beres and Sasiadek (1995) formulated a Lagrange finite-element dynamic model of ann-link flexible manipulator, in which large rigid-body rotational motion of the links andtheir small elastic deformations are coupled. The dynamic model, derived for a two-linkflexible manipulator with two finite elements per link, may be extended to an arbitraryn-link manipulator with n elements per link, as their simulation results show, but at greatercomputational burden.
Sasiadek and Srinivasan (1989) applied a model reference adaptive control (MRAC)technique to investigate position and vibration control of a distributed mass single-link flex-
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1418 A. GREEN and J. Z. SASIADEK
ible manipulator using a modal expansion method based on a pinned–free beam configurationto determine the first three significant vibration modes. Their MRAC strategy, based onstate-space formulation, was an attempt to achieve smaller position errors and an alternativeto regular PID control that failed to give satisfactory results. They coupled an elastic poten-tial function, derived from the modal expansion for a single flexible link with pinned–freeboundary conditions, to the rigid-link dynamics and formulated a Euler–Lagrange dynam-ics model and generalized inertia matrix of the manipulator. A simple feedback control lawcomprises a derivative gain and velocity feedback term and a gravity compensation term.PID transient responses to step and impulse inputs are compared to MRAC responses. Theirresults demonstrate accuracy of the modal expansion method within an MRAC strategy toachieve further reduction of positioning errors and decrease settling time of transient re-sponse to step inputs. Their work, together with other references on the use of assumedmodes in formulating flexible dynamics models, provides support to the work presented inthis paper (Fraser and Daniel, 1991� Junkins and Kim, 1993�Mordfin and Tadikonda, 2000).
Lee et al. (1994) have applied a fuzzy logic approach to endpoint position control of anexperimental flexible single-link manipulator, where the fuzzy rules have position errors andrates as inputs, with motor hub speed as the output variable to drive the physical manipulator.
Green and Sasiadek (2000, 2001, 2002) have studied tracking of a square trajectoryby a two-link robot manipulator using inverse dynamics, optimal and fuzzy logic systemcontrol schemes based on rigid-link dynamics and a control law derived from proportionaland derivative gains computed using the dominant vibration mode. In particular, Greenand Sasiadek (2001) have provided results of simulations using a linear quadratic Gaussiancontrol scheme with an extended Kalman filter (EKF) and fuzzy logic adaptive extendedKalman filter (FLAEKF) to control the endpoint tracking of a two-link robot manipulator.Process and measurement noise are input to simulate inherent sensor, mechanical componentand dynamics noise with the EKF and FLAEKF each performing disturbance rejection toachieve accurate tracking with various results. It was found that while the EKF tended toprovide divergent tracking at various noise intensities, the FLAEKF corrected the divergenceand consistently produced greater accuracy, although at a high computational time burden.
De Silva (1995) has used a fuzzy control technique to simulate tracking control of asquare trajectory by a rigid two-link robot manipulator where the fuzzy inference system isused to tune the servo gains achieving precise control at direction switches.
Passino and Yurkovich (1990) have used joint angles and rates as fuzzy controller inputswith voltage outputs applied to the actuators at each joint of an experimental two-link flexiblerobot. Responses were obtained to commanded 90� slew angles for two control systems: onewith coupled fuzzy controllers and the other uncoupled.
Literature on single-link and multilink robot dynamics and control is extensive, of whichthose referenced provide some insight to the difficulties encountered and techniques used tocontrol the endpoint of a robot manipulator and form a basis upon which further techniquescan be investigated.
The aim of this paper is to demonstrate control of a two-link robot manipulator modeledwith rigid and flexible dynamics based on dominant assumed modes for Euler–Bernoullipinned–pinned and cantilever beam boundary conditions. Of the three control schemes in-vestigated with rigid-link dynamics, i.e. inverse dynamics, linear quadratic regulator (LQR)and fuzzy logic, the inverse dynamics model is pursued further to model flexible-link ro-
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1419
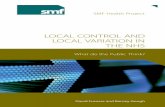
Figure 1. Two-link robot manipulator.
bot dynamics and to devise a control technique to reduce or eliminate transient vibrations atdirection switches and achieve zero error tracking. Investigations on LQR and fuzzy logicschemes using flexible-link dynamics are not considered further in this study.
2. ROBOT DYNAMICS
2.1. Robot Conf iguration
The two-link robot shown in Figure 1 has a shoulder joint revolute 2� rad and an elbowjoint oscillating � 3�2� rad. Robot motion and vibration modes are planar with gravity,joint inertia, friction, and payload inertias being neglected. Robot parameters and physicalconstants for the robot manipulator were taken from Banerjee and Singhose (1998).
2.2. Rigid-Link Robot Dynamics
A conventional closed form of the nonlinear dynamics of a two-link robot manipulator withrigid links may be derived in terms of kinetic and potential energies stored in the systemby the Euler–Lagrange formulation (Asada and Slotine, 1986). Given an independent set ofgeneralized coordinates, qi � q1�q2� �� �qn, the total kinetic and potential energies, T and Urespectively, stored in the system may be defined by the Lagrangian
� �qi� �qi� � T �U i � 1� �� � �n (1)
and the dynamic equations of motion for the system are derived in the form given by
d
dt
��
� �qi� ��
�qi� Fi� i � 1� � � ��n� (2)
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1420 A. GREEN and J. Z. SASIADEK
For the complete robot ensemble, the kinetic and potential energies for rigid links arederived respectively as
Tr � 1
2
n�k�1
r�p�1
Mkp �qi �q j � i � 1� 2� j � 1� 2� n � 2� r � 2 (3)
and
Ur �n�
i�1
mi gT r0�Ci � n � 2 (4)
where Mkp is a kp element of the robot inertia matrix M. Substituting equations (3) and (4)into equation (2) and applying the differential operators, we derive the Euler–Lagrange formof the dynamic equations for rigid links as
� M �� ��G� ��� �� � (5)
For equation (5), gravity terms are omitted for space borne operations, � substitutes forFi , i.e. the actuating torque vector acting on the robot joints, M is the robot inertia matrixand G is a coupling matrix comprising centrifugal and Coriolis force components given by
M �
�����m1 L2
3m2 L2
�4
3 cos �2
�m2 L2
�1
3 1
2cos �2
�m2 L2
�1
3 1
2cos �2
�m2L2
3
� (6)
G � ��
1
2m2L2 sin �2
�� ��2
�2��1 ��2
����1
� (7)
2.3. Flexible-Link Robot Dynamics
In addition to the nonlinearity of rigid-link dynamics, achieving accurate tracking controlof the two-link robot with flexible links is compounded by deformation of the links, asso-ciated flexural vibrations and non-minimum phase response. To enable design of a suitablecontrol strategy, the robot model must capture the nonlinear flexible dynamics of the ro-bot and the control method must sufficiently dampen residual vibrations while eliminatingnon-minimum phase response. Using assumed modes of vibration to model robot dynam-ics captures the interaction between flexural vibrations and nonlinear multibody dynamics.By assigning assumed modes for an Euler–Bernoulli beam with either cantilever or pinned–pinned boundary conditions to a two-link manipulator and by adding a flexibility potentialfunction in the Euler–Lagrange equations, a complete flexible dynamics model is derivedthat describes a flexible manipulator suitable for simulation.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1421
2.3.1. Assumed Modes Method
In the “assumed modes” method (Thomson, 1981� Fraser and Daniel, 1991� Junkins andKim, 1993� Robinett et al., 2002), the dynamic model of the robot manipulator is describedby a set of vibration modes other than its natural modes. Modeling flexural vibrationsof mechanical elements using assumed modes is a well-established technique. Using as-sumed modes to model flexibility requires Euler–Bernoulli beam theory boundary condi-tions and accommodates changes in configuration during operation, whereas natural modesmust be continually recomputed. Elastic deformations are modeled by a finite series ofspace-dependent “admissible functions” multiplied by a specific set of time-dependent am-plitude functions resulting in amplitudes that form the generalized configuration coordinatesin the Euler–Lagrange dynamics formulation. Admissible functions satisfy, at least, the sys-tem geometric boundary conditions. A chosen set of admissible functions forms the basisfunctions in the assumed modes method and are applied to the manipulator throughout itsoperational workspace, provided geometric boundary conditions are consistent. An approxi-mate deformation of any continuous elastic beam subjected to transverse vibrations is givenby
u�x� t �n�
i�1
i�x qi�t (8)
where i�x denotes the assumed mode shape for specific beam boundary conditions. Theshape functions, u�x� t , substitute into the Euler–Lagrange dynamics formulation given byequations (1) and (2).
2.3.2. Mode Summation Method
For the general case of an Euler–Bernoulli beam subjected to a uniform distributed loadalong its length L, the equation of motion is given by (Thomson, 1981)
�2
�x2
�E I�2u�x� t
�x2
�dx m�x
�2u�x� t
�t2� p�x� t � t� 0�x�L (9)
for which the normal modes i must satisfy the following equation and its boundary condi-tions �
E I��i��� � �2
i m�x i � 0 (10)
and the solution is given in terms of i�x by equation (8) (Thomson, 1981).Substituting equation (8) into equations (1) and (2), the generalized coordinates for beam
deformation can be determined and the elastic kinetic and potential energies are given by
Te�1
2
n�i
n�j
�qi �q j
� L
0i j m�x dx � 1
2
n�i
Mi �q2i i � 1� � � � � n� j � 1� � � � � n (11)
where Mi is the generalized mass matrix dependent upon mass distribution and assumedmodes shapes defined as
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1422 A. GREEN and J. Z. SASIADEK
Mi �� L
02
i �x m�x dx i � 1� � � � � n (12)
and
Ue � 1
2
n�i
n�j
�qi �q j
� L
0E I��i
��j dx � 1
2
n�i
Ki �q2i � �
1
2
n�i
�2i Mi �q2
i
i � 1� � � � � n� j � 1� � � � � n� (13)
Written in matrix form the equations for flexural motion of a non-actuated link are givenas
M �qKq � 0� (14)
Combining the flexural equations of motion for two links with those previously de-rived for rigid links, we obtain the following flexible dynamics matrix equations (Fraserand Daniel, 1991� Junkins and Kim, 1993� Robinett et al., 2002)
� M �q �qG � �q, q Kq� (15)
M is an inertia matrix of rigid and flexible-link elements, G is a dynamic coupling ma-trix for both rigid and elastic Coriolis and centrifugal effects, and K is a diagonal matrixof stiffness elements pertaining to flexural deflections of the links, presented in detail inFraser and Daniel (1991). The vector q is a set of generalized coordinates comprising jointangle and flexible-link displacements. In applying the Euler–Bernoulli beam theory for cal-culating assumed modes of vibration, small elastic deflections are an underlying assumptionwhere second-order terms of interacting elastic modes can be neglected. This, together withthe orthogonal properties of assumed modes, enables simplification of the dynamics matrixequation (15). Omitting elastic Coriolis and centrifugal components gives the rigid dynamicsmatrix G in equation (5).
2.4. Cantilever Assumed Modes
From transverse beam vibration theory (Timoshenko et al., 1974), cantilever mode shapesare given by
ci�x � cosh�ci x � cos�ci x � kci�sinh�ci x � sin�ci x (16)
where kci � cos�ci L cosh�ci L
sin�ci L sinh�ci L(17)
for which �ci L � �i � 1
2 � , i � 1� � � � � n, are numerically approximated roots of the char-
acteristic equation
cos �ci L cosh�ci L 1 � 0� (18)
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1423
Modal frequencies are given by
�ci � ��ci L 2
�E I
�L4� (19)
Proportional and derivative gains for the dominant assumed mode frequency are Kp �diag
��2
c1�2c1
� � diag [150�79� 150�79] and Kd � diag[2��c1 2��c1] � diag[17�364� 17�364]where �c1 � 12�28 Hz.
2.5. Pinned–Pinned Assumed Modes
Similarly, from transverse beam vibration theory pinned–pinned mode shapes are given by
ppi ��
2
�Lsin�ppi x (20)
for which �ppi L � i� are roots of the characteristic equation sin�ppi L � 0, i � 1� � � � � n�Modal frequencies are given by
�ppi � ��ppi L 2
�E I
�L4� (21)
For pinned–pinned assumed modes, the distal end of a link coincides with that of a rigidlink with angle � t subtended at the joint by the distal end. Proportional and derivative gainsfor the dominant assumed mode frequency are given by Kp � diag
��2
pp1 �2pp1
� � diag[1188�4 1188�4] and Kd � diag
�2��pp1 2��pp1
� � dia[48�746 48�746] where �pp1 �34�474 Hz.
2.6. Choice of Assumed Modes
While many researchers generally prefer treating the links as cantilevered beams, there isno stipulation as to which set of assumed modes should be used. Ideally, the optimum setof assumed modes is that closest to natural modes of the system. Natural modes dependon several factors within the robot system ensemble including size of hub inertia and sizeof payload mass. For large joint gearing inertia and relatively small payload mass, the linkmay be considered clamped at the joint with the endpoint free. Conversely, for smaller jointgearing inertia and larger payload mass both ends of the link may be considered pinned. Theultimate choice requires an assessment based on the actual robot structure and anticipatedrange of payloads together with its natural modes (Fraser and Daniel, 1991).
The use of both cantilever and pinned–pinned modes in this paper demonstrates thebehavior of each for the robot structure aforementioned, although only link mass withouthub inertia and payload has been included in the robot dynamics equation (15).
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1424 A. GREEN and J. Z. SASIADEK
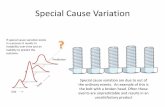
Figure 2. Inverse �exible dynamics control scheme.
2.7. Non-Minimum Phase Response
An inherent problem met in the control of slender flexible-link robots is non-minimum phaseresponse (Alexander, 1988). A characteristic of this phenomenon exists when joint actua-tion response delays occur in reaction to a control input opposite in sense to that expected.Practically, when torque actuates a joint it induces flexing and momentary acceleration ofthe endpoint in a direction opposite in sense to that commanded by the actuating torque. Inanalytical control theory, this behavior is described by a pole or zero of the transfer func-tion occurring in the right-half s-plane and termed a phase shift, or transport lag, betweenthe actuator and link endpoint. For continuous systems, this phase lag creates a time delaybetween the actual endpoint position and control actuation of the joint to correct feedbackposition errors and corresponds to the time taken by mechanical waves to propagate throughthe link from joint to endpoint.
Closely associated with non-minimum phase response is the distance between sensor andactuator, or non-collocation. This causes time delays in joint control actuation in responseto feedback position errors based on position data from a sensor located at the endpoint.Collocated control provides joint actuation in response to joint angle data from a sensorlocated at the joint. Typically, collocated control is suitable for fixed-base industrial robotmanipulators with rigid links and controlled at speeds where flexibility may be ignored.Also, non-collocation for these manipulators does not encounter flexibility because the linkis assumed rigid. However, for slender flexible robot manipulators, there is significant linkdeformation at the endpoint necessitating a technique to provide accurate control by adjustingfor the phase lag between actuator and endpoint.
An operational-space control scheme provides a suitable model for demonstrating non-collocated control as the joint rates and angles are transformed through direct kinematicsequations into Cartesian endpoint positions and velocities for generating feedback errors forthe control law computation.
The control schemes presented in this paper are all of the operational-space type. Non-minimum phase response is modeled by implementing a time delay in the feedback loopof the inverse flexible dynamics control schemes of Figures 2 and 3 (Dutton et al., 1997).Actual transport delay blocks (not shown) with a second-order Padé approximation wereimplemented in the Matlab/SimulinkTM models. To correct for this non-minimum phaseresponse, the same time delay acts upon the control law input to the robot dynamics to
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1425
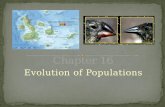
Figure 3. Inverse �exible dynamics fuzzy adapted control scheme.
achieve minimum phase response. The time delay was determined using the transverse beamvibration wave velocity equation given by
Wave velocity c ��
E
���
1745833
21� 288�33 ms�1� (22)
Delay time from joint 1 to endpoint for two link lengths, i.e. 9 m, is given by
td1 � 9
288�33� 0�0312 s� (23)
Delay time from joint 2 to endpoint for one link length, i.e. 4.5 m, is given by
td2 � 4�5
288�33� 0�0156 s� (24)
The average trajectory simulation time is 402 s for 16,000 steps at 0�001 step size, i.e.0�0252 s per step:
� Simulation delay time for joint 1
d1 � 0�0312
0�0252� 1�238 ss� (25)
� Simulation delay time for joint 2
d2 � 0�0156
0�0252� 0�619 ss� (26)
As the joint rates and angles are transformed to endpoint positions immediately afteroutput from the robot manipulator dynamics, and for simulation purposes, the time delay isimplemented in the position feedback loop at the maximum delay time d1, i.e. worst case.
Time delays are not considered for the inverse rigid dynamics, LQR and fuzzy controlschemes because their robot dynamics models are based on rigid links.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1426 A. GREEN and J. Z. SASIADEK
3. CONTROL SCHEMES
Three control schemes considered in this paper are based on inverse dynamics, state-spaceand fuzzy logic models of the rigid-link robot dynamics while two additional control schemesextend the inverse dynamics scheme to include flexible-link robot dynamics. The distinctionbetween the two inverse flexible dynamics schemes is that one has a fuzzy logic systemimplemented in its feedback loop for link deformations and provides a scalar output variablethat adapts the control law in response to the magnitude of deformation of each link.
3.1. Control Law
An intuitive Jacobian transpose control law applied to all control schemes provides a jointactuating torque vector given by
� � JT ��
�Kp
�ex
ey
Kd
� �ex
�ey
� (27)
Proportional and derivative gain values Kp and Kd, calculated using cantilever andpinned–pinned assumed mode frequencies, are used in the following control schemes. Com-mon to all control schemes is the use of output slew angles �1� �2 transformed in the directkinematics equations (28) and (29) to x� y endpoint positions and fed back to form positionerrors xc � x� yc � y:
x � L1cos��1 L2cos��1 �2 (28)
y � L1sin��1 L2sin��1 �2 � (29)
The resulting errors are fed forward for computing the control laws of equation (27) and(35).
3.2. Inverse Dynamics Scheme
The inverse rigid dynamics control scheme shown in Figure 4 was investigated and presentedin previous work by Green and Sasiadek (2000, 2002). Using the control law of equation(27), the torque vector feeds into the nonlinear inverse dynamics equations giving anangular acceleration vector output then double integrated to obtain joint rates ��1� ��2 and slewangles �1� �2. Joint rates transform to endpoint velocities and feed back to form velocityerrors �xc � �x� �yc � �y. Joint rates and slew angles also feed back into the inverse dynamicsequations. The control scheme is typical for a two-link robot manipulator in the literature onrobot analysis and control (Asada and Slotine, 1986).
3.3. Linear Quadratic Regulator Scheme
The LQR control scheme shown in Figure 5 was investigated and presented in previous workby Green and Sasiadek (2000, 2001, 2002). It has a similar feedback structure as the inverse
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1427
Figure 4. Inverse rigid dynamics control scheme.
Figure 5. LQR control scheme.
dynamics control scheme but the dynamics equations given by equation (5) are linearizedand transformed into the state-space form of equations (30) and (31). The torque vector computed by the control law of equation (27) feeds through LQ input gains into the state-space equations (30) and (31), to actuate each joint:
�x � Ax Bu (30)
z � CxDu� (31)
The state vector �x has two joint angles and two angular velocities for rigid-link dynamics.The state feedback system minimizes the performance index given by equation (32):
J � �
0
�xTQx uTRu
�dt� (32)
The LQ gain matrix K is calculated by
K � R�1BTP (33)
where P is a definite positive solution of the Riccati equation:
ATP PA� PBR�1BT Q � 0� (34)
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1428 A. GREEN and J. Z. SASIADEK
Figure 6. Fuzzy logic control scheme: (a) control scheme� (b) fuzzy robot manipulator.
Q � R � diag [1� 1� 1� 1] are arbitrary weighting matrices of the performance index.Outputs from the state-space dynamics feed through LQ gains to provide slew angles
�1� �2.
3.4. Fuzzy Logic Scheme
The fuzzy logic scheme shown in Figure 6 was investigated and presented in previous workby Green and Sasiadek (2000, 2002). Two coupled fuzzy logic systems model the manipu-lator links and substitute for the inverse dynamics equations. The torque vector computedby the control law of equation (27) feeds forward to each fuzzy link through normalizinggains, KN1 and KN2. Link 1 has a single torque input, and link 2 has acceleration and torqueinputs as shown in Figure 6(b). Acceleration output from link 1 is input to link 2 throughnormalizing gain KN3to create a coupling effect between them and capture the combined mo-tion and interaction of both links as the acceleration of link 1 at the elbow joint significantlyaffects link 2 endpoint vibration. Conversely, acceleration at the endpoint of link 2 does notsignificantly affect the motion of link 1.
The fuzzy logic systems have input and output variables typically each with nine Gaussianmembership functions shown in Figures 7(a)–(d) for cantilever links. Verbal descriptors usedin the fuzzy rules are composed using the notation P = positive, N = negative, V = very, H= high and L = low to denote the membership functions NVH, NH, NL, NVL, ZERO, PVL,PL, PH and PVH, respectively. For cantilever assumed modes, link 1 has nine fuzzy ruleswith torque universe of discourse –500 to 500 N-m. Link 2 has 81 fuzzy rules with acceler-ation and torque universes of discourse –2 to 2 rad s�2 and –200 to 200 N-m, respectively.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1429
Figure 7. Fuzzy membership functions (cantilever): (a) fuzzy link 1 torque input� (b) fuzzy link 2 torqueinput� (c) fuzzy link 2 acceleration input� (d) fuzzy link 1 and 2 acceleration outputs� (e) fuzzy logicsystem �exible-link deformation input variables �1 and �2� (f) fuzzy logic system output variable �.
Each link has acceleration output universe of discourse –5 to 5 rad s�2. For pinned–pinnedassumed modes, the universes of discourse are respectively –5000 to 5000 N-m for torqueactuating link 1, –1000 to 1000 N-m for torque actuating link 2, –2 to 2 rad s�2 for couplingacceleration input to link 2 and –5 to 5 rad s�2 for acceleration outputs from both links.
Table 1 is a matrix of fuzzy rules of the form:
IF torque 1 is NL THEN acceleration 1 is NL�IF torque 1 is PH THEN acceleration 1 is PH.
Table 2 is a matrix of fuzzy rules of the form:
IF torque 2 is PL and acceleration 12 is PL THEN acceleration 2 is PH�IF torque 2 is NVL and acceleration 12 is PVL THEN acceleration 2 is ZERO.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1430 A. GREEN and J. Z. SASIADEK
Table 1. Rule matrix for link 1.
Torque (1) NVH NH NL NVL ZERO PVL PL PH PVHAcceleration (1) NVH NH NL NVL ZERO PVL PL PH PVH
Table 2. Rule matrix for link 2.
Output accelerations feed through output scaling gains, K1 and K2, adjusted to modifythe base widths of membership functions and dampen robot link vibrations to obtain a squaretrajectory with greatest precision. The fuzzy logic scheme for cantilever and pinned–pinnedmode frequencies produced initial and final square trajectories with the following stabilitylimits of output scaling gains of K1 and K2:
for cantilever8000 � K1 � 200000
2000 � K2 � 80000
for pinned–pinned
500000 � K1 � 1000000�
50000 � K2 � 100000
Outputs from the fuzzy robot manipulator provide slew angles �1� �2.
3.5. Inverse Flexible Dynamics Control Scheme
The control scheme shown in Figure 2 comprises the same control architecture elements asthe inverse rigid dynamics control scheme shown in Figure 4, but comprises inverse flexibledynamics equations with link deformations � 1� � 2 fed back into the dynamics equations to-gether with slew angles �1,�2 and joint rates ��1���2. Using the control law of equation (27),the torque vector � feeds into the inverse flexible dynamics equations derived using an as-sumed modes model (Mordfin and Tadikonda, 2000) to give a joint acceleration vector outputthat is double integrated to obtain joint rates and slew angles. Joint rates ��1���2 transform toendpoint velocities and feedback to form velocity errors �xc � �x� �yc � �y. Errors feed forwardfor computing the control law of equation (27). Joint rates and slew angles also feed backinto the inverse flexible dynamics equations.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1431
Table 3. Fuzzy logic system rule matrix for adaptive control law.
�2
NVH NH NL NVL ZERO PVL PL PH PVH�
NVH PMAX PVVH PVVH PVVH PVH PVH PVH PH PMNH PVVH PVVH PVH PVH PVH PH PH PM PHNL PVVH PVH PVH PVH PH PH PM PM PHNVL PVH PVH PH PH PH PM PM PM PL
�1 ZERO PVH PH PL PVL ZERO PVL PL PH PVHPVL PL PM PM PM PH PH PH PVH PVHPL PM PM PM PH PH PVH PVH PVH PVVHPH PM PM PH PM PVH PVH PVH PVVH PVVHPVH PM PH PH PVH PVH PVVH PVVH PVVH PMAX
3.6. Fuzzy Adapted Inverse Flexible Dynamics Control Scheme
The control scheme shown in Figure 3 is similar to Figure 2 but modified to include a fuzzylogic system. Adaptive control is achieved by the scalar variable � output from the fuzzylogic system to adapt the Jacobian transpose control law. The variable � is determined byelastic deformations �1 and �2 fed back from the control scheme outputs through a normal-izing gain to input the fuzzy logic system. The resulting control law is
� ��
JT ��
�Kp
�ex
ey
�Kd
� �ex
�ey
� �� (35)
Fuzzy logic system input variables �1, �2 and output variable � each have nine Gaussianmembership functions shown in Figures 7(e) and (f). Verbal descriptors used in the fuzzyrules are composed using the notation P = positive, N = negative, V = very, MAX = max-imum, H = high, and L = low to denote the membership functions NVH, NH, NL, NVL,ZERO, PVVL, PVL, PL, PH, PVVH and PMAX, respectively. Universes of discourse rangefrom –5 to 5 m for input variables �1, �2 and from 0 to 20 for output variable �.
Table 3 is a matrix of fuzzy rules of the form:
IF �1 is NL and �2 is PL THEN � is PM�IF �1 is PVL and �2 is PH THEN � is PVH.
The fuzzy logic system is developed intuitively as the magnitude of elastic deformationof either link varies positively or negatively, so it may complement or counter the deforma-tion of the other link. The value of � adjusts according to the severity of resultant deforma-tion.
The control law torque vector given by equation (35) feeds into the inverse flexible dy-namics equations using an assumed modes model derived by Mordfin and Tadikonda (2000)to give a joint acceleration vector output then double integrated to obtain link deformations�1, �2 , joint rates ��1� ��2 and slew angles �1� �2. Joint rates transform to endpoint velocitiesand feedback to form velocity errors �xc � �x� �yc � �y. Errors feed forward for computingthe control law of equation (35). Joint rates and slew angles also feedback into the inversedynamics equations.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1432 A. GREEN and J. Z. SASIADEK
Figure 8. Rigid-link dynamics trajectories: (a) cantilever inverse dynamics model� (b) pinned–pinnedinverse dynamics model� (c) cantilever LQR state-space model� (d) pinned–pinned LQR state-spacemodel� (e) cantilever fuzzy logic model� (f) pinned–pinned fuzzy logic model.
4. RESULTS
Tracking starts at the bottom-left corner of each trajectory with link 1 rotating 2� rad clock-wise for which results are shown in Figures 8, 9, 10, and 11 Trajectories obtained for theinverse rigid dynamics control scheme using cantilever and pinned–pinned assumed modePD gains are shown in Figures 8(a) and (b). It is evident that large amplitude transientsare experienced at the direction switches for the dominant cantilever assumed mode. Incontrast, greater control accuracy with lower amplitude transients is obtained using the dom-inant pinned–pinned assumed mode. Tracking times are 220 and 212 s for cantilever andpinned–pinned modes, respectively. Trajectories obtained for the LQR scheme, with a rigiddynamics model using cantilever and pinned–pinned assumed modes, are shown in Figures8(c) and (d).
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1433
Figure 9. Rigid-link dynamics trajectory comparisons at the �rst (top left) direction switch: (a) cantilever�(b) pinned–pinned.
The LQR scheme produces a much-improved result over the inverse dynamics schemefor both cantilever and pinned–pinned assumed modes, although the trajectory is better forthe pinned–pinned assumed mode. Tracking times are 188 and 372 s for cantilever andpinned–pinned modes, respectively.
Results for the fuzzy logic scheme shown in Figures 8(e) and (f) demonstrate that greatercontrol accuracy can be achieved by substituting the dynamics equations with a fuzzy logicsystem representing each link and the benefit of flexible tuning of fuzzy output scaling gainsK1 and K2, within their limits of stability to dampen the vibration transients, particularlyfor the cantilever mode. Tracking times are 352 and 360 s for cantilever and pinned–pinnedmodes, respectively.
A comparison of transients “zoomed” at the first direction switch for inverse dynamics,LQR and fuzzy control schemes using rigid dynamics models are shown in Figures 9(a) and(b). For the cantilever mode, the inverse dynamics control scheme maximum overshoot is
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1434 A. GREEN and J. Z. SASIADEK
Figure 10. Inverse �exible dynamics trajectories: (a) cantilever� (b) pinned–pinned� (c) cantilevertrajectory comparison at the �rst (top left) direction switch� (d) pinned–pinned trajectory comparison at�rst (top left) direction switch� (e) cantilever trajectory comparison (zoomed)� (f) pinned–pinned trajectorycomparison (zoomed).
0.7 m at 4600 ss and settling time of 6000 ss. The maximum overshoot for the LQR controlscheme is much lower at 0.3 m at 4400 ss and settling time of 5800 ss. The most effectivecontrol is obtained with the fuzzy logic scheme for which the result has a lower maximumovershoot of 0.2 m at 4250 ss immediately followed by a smooth gradual decay in a settlingtime of 5800 ss.
In comparison, for the pinned–pinned mode, the inverse dynamics scheme exhibits amaximum overshoot of 0.1 m at 4180 ss with a settling time of 4800 ss. For the LQR controlscheme, the maximum overshoot is a much lower 0.1 m at 4100 ss with a settling time of4400 ss. For the fuzzy logic scheme, the peak amplitude occurs below the commanded 6.3 mposition at 6.1 m and 4100 ss, i.e. 0.2 m before reaching the commanded position of 6.3 m,and rises gradually to achieve it in a settling time of 1000 ss.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1435
Figure 11. Fuzzy adapted inverse �exible dynamics trajectories: (a) cantilever� (b) pinned–pinned� (c)cantilever trajectory comparison at the �rst (top left) direction switch� (d) pinned–pinned trajectory com-parison at �rst (top left) direction switch� (e) cantilever trajectory comparison (zoomed)� (f) pinned–pinnedtrajectory comparison (zoomed).
For the pinned–pinned mode, the LQR scheme provides greater control accuracy inachieving the desired trajectory with greater damping of vibration amplitude in the short-est time. However, the fuzzy logic scheme produces the best result for the cantilever modebut it provides overdamping for the pinned–pinned mode and fails to reach its commandedposition prior to convergence along the trajectory after the direction switch.
Endpoint velocities in both x and y directions are presented in Figures 12(a)–(d) to com-pare the changes in velocity along the trajectory between the cantilever and pinned–pinnedmodes for the three rigid dynamics control schemes.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1436 A. GREEN and J. Z. SASIADEK
Figure 12. Endpoint velocities: (a) cantilever x-velocity� (b) pinned–pinned x-velocity� (c) cantilevery-velocity�(d) pinned–pinned y-velocity.
The endpoint velocity for both sets of assumed modes exhibits sharp increases as itapproaches each direction switch for all control schemes, with the inverse dynamics schemebeing the most pronounced. The pinned–pinned mode exhibits a faster decrease in velocityafter each direction switch compared to the slower decrease of the cantilever mode. Peakvelocities are also higher for the pinned–pinned mode.
To exemplify the robot joint dynamics, joint accelerations are shown only for the in-verse dynamics control scheme in Figures 13(a)–(d) for both sets of assumed modes. Thecantilever mode accelerations are much higher and take longer to diminish than those of thepinned–pinned mode.
Results for the inverse flexible dynamics model control scheme are shown in Figures10(a)–(f) and include trajectories tracked to compare simulations with and without time de-lays to represent minimum phase, non-minimum phase, and corrected responses. Whilethe trajectories in Figures 10(a)–(d) show consistent results with and without time delays,Figures 10(e) and (f) more clearly show the results of implementing time delays in the feed-back loop to affect non-minimum phase response and in the control input to affect correctivecontrol action. As a result of feedback time delay, it is evident that the transient responseovershort increases by 0.05 m and is minimally corrected 0.001 m by the control actiontime delay. The cantilever mode trajectories show markedly higher maximum overshoots
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1437
Figure 13. Inverse rigid dynamics joint accelerations: (a) cantilever joint 1�(b) pinned–pinned joint 1�(c)cantilever joint 2�(d) pinned–pinned joint 2.
of 0.5 m and more severe oscillations compared to the 0.1 m maximum overshoots for thepinned–pinned mode. Figures 14(a)–(d) and Figures 15(a)–(d) show no noticeable differencein the endpoint velocities and joint accelerations. It is evident that assumed mode flexibledynamics cause greater oscillation in the control action to counter the effects of flexibilityin the links. Flexural vibrations dominate variations in control action and nullify the ef-fect of non-minimum phase response. Tracking times are 400 and 404 s for cantilever andpinned–pinned modes, respectively.
The results obtained using the fuzzy adapted inverse flexible dynamics control schemedemonstrate a significant reduction in vibration for both cantilever and pinned–pinned modes,as shown in Figures 11(a)–(d). The effects of implementing time delays to simulate non-minimum phase response and its correction, shown in Figures 11(e) and (f), are similar toresults obtained for the prior case and considered insignificant in contrast to the overridingeffect of fuzzy adapted control action. The transient response for the pinned–pinned modeexhibits a maximum overshoot of 0.05 m and a rapid decay to a steady state. In contrast,the cantilever mode exhibits a maximum overshoot of 0.1 m and vigorous oscillations of+/– 0.1 m for about one-third of each leg of the trajectory. Endpoint velocities are the samefor both cantilever and pinned–pinned modes with greatly reduced oscillation peaks. Simi-
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1438 A. GREEN and J. Z. SASIADEK
Figure 14. Inverse �exible dynamics endpoint velocities: (a) cantilever x-velocity� (b) pinned–pinnedx-velocity� (c) cantilever y -velocity� (d) pinned–pinned y -velocity.
larly, joint accelerations for both assumed modes show no difference and demonstrate smallvariation in control action, except at direction switches where pronounced yet instantaneouspeaks occur. Tracking times are 1064 and 1060 s for cantilever and pinned–pinned modes,respectively. Matlab/SimulinkTM, Control Systems and Fuzzy Logic Tollboxes were usedfor all simulations.
5. CONCLUSIONS
In this paper we have demonstrated the relative effectiveness in tracking control of a two-link robot manipulator using a rigid dynamics model and PD gains computed on dominantcantilever and pinned–pinned assumed mode frequencies by three different techniques: in-verse dynamics, LQR, and fuzzy logic. Of these, fuzzy logic produces the best result for thecantilever mode and LQR for the pinned–pinned mode. The cantilever mode presents a moresevere case for control and the fuzzy logic scheme provides effective and accurate controlover damps for the pinned-pinned mode case.
The rigid dynamics model was used initially to establish a benchmark in system responseand to ascertain the most suitable control scheme for further study of a flexible dynamicsmodel. The inverse dynamics scheme was chosen as it more closely represents the nonlinear
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

CONTROL OF A TWO-LINK ROBOT MANIPULATOR 1439
Figure 15. Inverse �exible dynamics joint accelerations: (a) cantilever joint 1� (b) pinned–pinned joint 1�(c) cantilever joint 2� (d) pinned–pinned joint 2.
dynamical behavior of a flexible manipulator and presents a formidable challenge for con-trol. Alternatively, the LQR scheme, based on a linear state-space dynamic model and thefuzzy logic model, requires further development to capture multibody nonlinearity and linkflexibility.
In principle, results obtained for the inverse dynamics model for flexible links endorsethe theory of coupling large rotational rigid-link motions with small flexural deformationsto characterize the behavior of a two-link flexible robot, albeit restricted to the dominantmode. Modeling non-minimum phase response by a time delay further characterizes thecomplexity of the manipulator’s dynamical behavior and presents an additional challenge forcontrol. This is shown to be effectively remedied by time-delayed control action.
Implementing a time delay in the control action achieves minimal correction to the non-minimum phase response. However, for the overriding problem of residual vibrations oc-curring at direction switches, significant results are achieved by implementing a fuzzy logicsystem that adapts the control action in response to the magnitude of link deformation.
The investigations culminate with a simple, yet effective, technique utilizing a hybridof inverse dynamics and fuzzy logic to achieve precision control of a flexible robot withoutlinearizing the flexible nonlinear dynamics equations.
Future work could pursue the LQR and fuzzy control schemes for flexible dynamics andall three control schemes with flexible dynamics models for higher assumed modes, togetherwith the development of suitable control laws to achieve precision tracking control. Physical
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1440 A. GREEN and J. Z. SASIADEK
laboratory flexible robot manipulator experiments could be performed with different jointhub inertias and endpoint payloads to correlate with simulation results.
REFERENCES
Alexander, H. L., 1988, “Control of articulated and deformable space structures,” in Machine Intelligence andAutonomy for Aerospace Systems, E. Heer and H. Lum, eds, Progress in Astronautics and Aeronautics,AIAA, Washington, DC, pp. 327–347.
Asada, H. and Slotine, J.-J. E., 1986, Robot Analysis and Control, Wiley, NY.Banerjee, A. K. and Singhose, W., 1998, “Command shaping in tracking control of a two-link flexible robot,”
Journal of Guidance, Dynamics and Control 21 (6), 1012–1015.Beres, W. and Sasiadek, J. Z., 1995, “Finite element dynamic model of multilink flexible manipulators,” Applica-
tions in Mathematics and Computer Science 5 (2), 231–262.de Silva, C. W., 1995, Intelligent Control: Fuzzy Logic Applications, CRC Press, Boca Raton, FL.Dutton, K., Thompson, S., and Barraclough, B., 1997, The Art of Control Engineering, Addison-Wesley, Reading,
MA.Fraser, A. R. and Daniel, R. W., 1991, Perturbation Techniques for Flexible Manipulators, Kluwer International
Series in Engineering and Computer Science, Vol. 138, Kluwer, Boston, MA.Green, A. and Sasiadek, J. Z., 2000, “Direct, optimal, stochastic and fuzzy control of a two-link flexiblemanipulator,”
in Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Denver, CO, August14–17, Paper No. AIAA 2000-4375.
Green, A. and Sasiadek, J. Z., 2001, “Regular and extended Kalman filtering for a two-link flexible robot manip-ulator,” in Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Montreal,Quebec, Canada, August 6–9, Paper No. AIAA 2001-4565.
Green, A. and Sasiadek, J. Z., 2002, “Methods of trajectory tracking for flexible-link manipulators,” in Proceedingsof the AIAA Guidance, Navigation and Control Conference and Exhibit, Monterey,CA, August 5–8, PaperNo. AIAA 2002-4565.
Junkins, J. L. and Kim, Y., 1993, Introduction to Dynamics and Control of Flexible Structures, Education Series,J. S. Przemieniecki, Editor-in-Chief, AIAA, Washington, DC.
Lee, J. X., Vukovich, G., and Sasiadek, J. Z.., 1994, “Fuzzy control of a flexible-link manipulator,” in Proceedingsof the American Control Conference, Baltimore, MD, June, Paper WM7-1:50.
Mordfin, T. G. and Tadikonda, S. S. K., 2000, “Truth models for articulating flexible multibody dynamic systems,”AIAA Journal of Guidance, Dynamics and Control 23 (5), 805–811.
Passino, K. M. and Yurkovich, S., 1990, Fuzzy Control, Addison-Wesley, Reading, MA.Robinett, R. D. III, Dohrmann, C., Eisler, G. R., Feddema, J., Parker, G. G., Wilson, D. G., and Stokes, D., 2002,
Flexible Robot Dynamics and Controls, International Federation for Systems Research International Serieson Systems Science and Engineering, Vol. 19, Kluwer, Dordrecht.
Sasiadek, J. Z. and Srinivasan, R., 1989, “Dynamic modeling and adaptive control of a single-link flexible manip-ulator,” AIAA Journal of Guidance, Dynamics and Control 12 (6), 838–844.
Timoshenko, S., Young, D. H., and Weaver, W. Jr., 1974, Vibration Problems in Engineering, 4th edition, Wiley,NY.
Thomson, W. T., 1981, Theory of Vibration with Applications, 2nd edition, Prentice-Hall, Englewood Cliffs, NJ.
© 2004 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from