Torsion response of a cracked stainless steel shaft
14
10.1111/j.1460-2695.2007.01149.x Torsion response of a cracked stainless steel shaft C. J. LISSENDEN 1 ∗ , S. P. TISSOT 1 , M. W. TRETHEWEY 2 and K. P. MAYNARD 3 1 Department of Engineering Science and Mechanics, 2 Department of Mechanical Engineering, 3 Applied Research Laboratory, Penn State, University Park, PA 16802, USA Received in final form 26 December 2006 ABSTRACT Pump shafts used for power generation are susceptible to fatigue cracking while often in near-continuous operation. Technology based on torsional vibration is under develop- ment for condition-based assessment of shaft health. The focus of this paper is on the relationship between a crack, which propagated due to bending loads, and the torsional stiffness of the shaft. An analytical method to determine the compliance associated with a crack has been implemented for a semi-elliptical surface crack. A 3-D finite element model of a shaft section with a crack has also been used to predict the effect of a crack on stiffness. Fatigue cracks were seeded in shafts on a three-point bend apparatus. A benchtop test rig was constructed to evaluate the torsional natural frequencies of a cracked shaft system. Quasistatic torsional stiffness tests indicated that crack closure has an effect on the results. A torsional finite element model of the benchtop test rig indicates that the first torsional natural frequency is reduced by the propagation of a crack. The reduction in torsional stiffness of the shaft inferred from the natural frequency results is in reasonable agreement with the quasistatic results and the model predictions. Keywords semi-elliptical surface crack, torsional stiffness, natural frequency, condition- based monitoring. INTRODUCTION The growth of fatigue cracks in rotating components in the power generation industry, especially pump shafts, is a significant economic and safety concern. 1 Fatigue cracks typically initiate at stress concentrators due to some com- bination of thermal, bending and torsional loads. In many cases the equipment is required to operate continuously for extended periods of time, highlighting the impor- tance of on-line structural health monitoring. The mea- surement of vibrational response features can be used to monitor structural damage, such as that due to a fatigue crack because crack growth decreases structural stiffness, which changes the vibrational characteristics. The work presented herein was undertaken in response to the occur- rence of fatigue cracks in reactor coolant pump shafts for nuclear power plants. In this case, the crack apparently ini- tiates at a pinhole due to thermal loading and then prop- agates due to bending stresses. These cracks have been observed to propagate as either a semi-elliptical surface ∗ Correspondence: C. J. Lissenden. E-mail: [email protected] crack or a circumferential crack. Shaft deflection-based vibration monitoring systems were ineffective in provid- ing an early warning to the plant operators. Recent work has shown the potential of torsional vibration monitoring to detect structural damage. 2,3 Laboratory tests have shown the ability to detect tor- sional natural frequency changes as successively deeper seeded faults were placed in shafts and a model bladed disk assembly. 3 However, effective prognostics require the change in torsional natural frequency to be related to the change in the shaft’s structural state (i.e., fatigue crack size). If the crack geometry can be related to the change in torsional stiffness, the shaft’s health can be directly as- sessed from the observed torsional vibration signature fea- tures. Previous work 4,5 has examined the effects of tor- sional stiffness for cuts with straight fronts, but cuts are not necessarily representative of the effects that a fatigue crack has on a shaft’s torsional stiffness. The difference is primarily due to the surface contact associated with crack closure present for a fatigue crack, but not for a cut. The effect of fatigue cracks on torsional stiffness has not been thoroughly investigated until very recently by Vaziri and Nayeb-Hashemi, 6,7 who consider circumferential cracks. 734 c 2007 The Authors. Journal compilation c 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747
Transcript of Torsion response of a cracked stainless steel shaft

10.1111/j.1460-2695.2007.01149.x
Torsion response of a cracked stainless steel shaft
C. J. LISSENDEN1∗, S. P. TISSOT1, M. W. TRETHEWEY2 and K. P. MAYNARD3
1Department of Engineering Science and Mechanics, 2Department of Mechanical Engineering, 3Applied Research Laboratory, Penn State, UniversityPark, PA 16802, USA
Received in final form 26 December 2006
A B S T R A C T Pump shafts used for power generation are susceptible to fatigue cracking while oftenin near-continuous operation. Technology based on torsional vibration is under develop-ment for condition-based assessment of shaft health. The focus of this paper is on therelationship between a crack, which propagated due to bending loads, and the torsionalstiffness of the shaft. An analytical method to determine the compliance associated witha crack has been implemented for a semi-elliptical surface crack. A 3-D finite elementmodel of a shaft section with a crack has also been used to predict the effect of a crack onstiffness. Fatigue cracks were seeded in shafts on a three-point bend apparatus. A benchtoptest rig was constructed to evaluate the torsional natural frequencies of a cracked shaftsystem. Quasistatic torsional stiffness tests indicated that crack closure has an effect on theresults. A torsional finite element model of the benchtop test rig indicates that the firsttorsional natural frequency is reduced by the propagation of a crack. The reduction intorsional stiffness of the shaft inferred from the natural frequency results is in reasonableagreement with the quasistatic results and the model predictions.
Keywords semi-elliptical surface crack, torsional stiffness, natural frequency, condition-based monitoring.
I N T R O D U C T I O N
The growth of fatigue cracks in rotating components inthe power generation industry, especially pump shafts, is asignificant economic and safety concern.1 Fatigue crackstypically initiate at stress concentrators due to some com-bination of thermal, bending and torsional loads. In manycases the equipment is required to operate continuouslyfor extended periods of time, highlighting the impor-tance of on-line structural health monitoring. The mea-surement of vibrational response features can be used tomonitor structural damage, such as that due to a fatiguecrack because crack growth decreases structural stiffness,which changes the vibrational characteristics. The workpresented herein was undertaken in response to the occur-rence of fatigue cracks in reactor coolant pump shafts fornuclear power plants. In this case, the crack apparently ini-tiates at a pinhole due to thermal loading and then prop-agates due to bending stresses. These cracks have beenobserved to propagate as either a semi-elliptical surface
∗ Correspondence: C. J. Lissenden. E-mail: [email protected]
crack or a circumferential crack. Shaft deflection-basedvibration monitoring systems were ineffective in provid-ing an early warning to the plant operators. Recent workhas shown the potential of torsional vibration monitoringto detect structural damage.2,3
Laboratory tests have shown the ability to detect tor-sional natural frequency changes as successively deeperseeded faults were placed in shafts and a model bladeddisk assembly.3 However, effective prognostics require thechange in torsional natural frequency to be related to thechange in the shaft’s structural state (i.e., fatigue cracksize). If the crack geometry can be related to the changein torsional stiffness, the shaft’s health can be directly as-sessed from the observed torsional vibration signature fea-tures. Previous work4,5 has examined the effects of tor-sional stiffness for cuts with straight fronts, but cuts arenot necessarily representative of the effects that a fatiguecrack has on a shaft’s torsional stiffness. The difference isprimarily due to the surface contact associated with crackclosure present for a fatigue crack, but not for a cut. Theeffect of fatigue cracks on torsional stiffness has not beenthoroughly investigated until very recently by Vaziri andNayeb-Hashemi,6,7 who consider circumferential cracks.
734 c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

TORSION RESPONSE OF A CRACKED STAINLESS STEEL SHAFT 735
Here, motivated by cracks observed in reactor coolantpump shafts, we investigate the effect of semi-ellipticalsurface cracks on torsional stiffness. The evaluation uti-lizes analytical modelling, finite element analysis (FEA),and a series of seeded fault experiments with both cuts andfatigue cracks. Torsional stiffness is determined by apply-ing a quasistatic torque to a (damaged) shaft and measuringthe angle of twist. The slope of the angle of twist–torquecurve is the torsional stiffness. This can be done in thelaboratory or simulated using FEA. Torsional stiffness canalso be inferred from dynamic testing through a combi-nation of experiments and modelling as will be describedbelow.
The seeded fault experimental database was developedusing the following procedure:
1 A fatigue crack is grown in a stainless steel shaft usingthree-point bending (Fig. 1).
2 The crack is characterized visually and by ultrasonicinspection.
3 Torsional stiffness (rigidity) is measured by applying atorque to the shaft and measuring the angle of twist.
4 The shaft is placed in a torsional vibration test stand andthe line shaft torsional natural frequency measured.
5 Steps 1–4 are repeated multiple times to acquire datafor progressively deeper cracks.
6 At completion of the sequence, the shaft was destruc-tively sectioned to measure the beach marks on the frac-ture surface.
For reference purposes, shafts with open cuts are alsoexamined. The same test sequence is used with the excep-tion that a sequence of straight front cuts is used insteadof fatigue cracks.
Analytical and finite element models of the cracked shaftare created. Both static and dynamic results are comparedwith the experimental results.
In order to determine how well various methods com-pare, the torsional stiffness will be determined using fourdifferent methods:
1 Quasistatic torsion experiments on cracked shafts,2 Dynamic tests on a benchtop test rig to determine
the torsional natural frequency and iteratively back-calculate the torsional spring constant representative ofthe crack using a finite element model to match theexperimental frequency data,
3 3-D finite element model of the cracked shaft,4 Inverse of the compliance obtained from an analytical
model.
Comparison of the model and experimental results pro-vides insight into the torsional stiffness degradation asso-ciated with fatigue cracks and cuts in shafts.
M O D E L S
Models are used to quantify the additional torsional shaftcompliance (flexibility) due to the presence of a crack andto predict the effect of a crack on the natural frequenciesand mode shapes of a line shaft system. The additionalshaft compliance due to a crack is modelled both analyt-ically and with finite elements, however neither of theseaccount for the frictional effects of a closed crack.
Cracked shaft compliance
Analysis of pump shaft systems, or the table-top systembuilt for this study, is readily performed using a line shaftmodel where the shaft is represented by beam elements.A crack in the shaft creates additional compliance that canbe represented by a discrete spring. The stiffness of thespring can be determined by (i) analytical methods, (ii)numerical methods or (iii) experimental methods. Eachof these is considered, starting with an analytical method.
The general theoretical framework applied byPapadopoulos4,5,8 starts with the Paris equation fordescribing the additional generalized displacement (threetranslations and three rotations), associated with a crack,
u j = ∂
∂ Pj
∫Ac
�d A j = 1, 2, . . . , 6, (1)
where Ac is the crack surface area, Pj are generalized forces(three force components and three moment components),and
� = 1E ′
⎡⎣[6∑
j=1
KI j
(α
h
)]2
+[
6∑j=1
KII j
(α
h
)]2
+ m
[6∑
j=1
KIII j
(α
h
)]2⎤⎦ (2)
is the strain energy density function, with K Ij(α/h),K IIj(α/h) and K IIIj(α/h) being the stress intensity factorsassociated with generalized force Pj, α/h is the crack depthto section depth ratio, and
E ′ ={
E for plane stressE
1−νfor plane strain
m = E ′
2G, (3)
where E is Young’s modulus, ν is Poisson’s ratio, and Gis the shear modulus. The theorem of Castigliano can beemployed to determine the 6 × 6 compliance matrix as-sociated with the crack,
Si j = ∂ui
∂ Pj= ∂2
∂ Pi∂ Pj
∫Ac
�d A. (4)
Papadopoulos5 has implemented this analysis for an opencrack having a straight crack front using the geometry
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

736 C. J. L I SSENDEN et al.
a
0.25 mmmachined notch with maximum
root radius of 0.076 mm
P
Ls
76 mm 76 mm
2Ra
Fig. 1 Three-point bend specimen geometry.
shown in Fig. 2(a). The geometric variables are:
h = 2√
R2 − z2
a ′ = √R2 − z2 − R + a
b =√
R2 − [R − a]2 ,(5)
which represent the section height, crack depth and halfcrack width, respectively, at the integration point. For thespecial case of a crack in a shaft subjected solely to a torque,T , the only non-zero stress intensity factors and geometryfactors are
KII6
(α
h
)= 2Tz
π R4
√παFII
(α
h
)KIII6
(α
h
)= 2T
√R2 − z2
π R4
√παFIII
(α
h
)(6)
and
FII
(α
h
)= 1.122 − 0.561
(αh
) + 0.085(
αh
)2 + 0.180(
αh
)3√1 − (
αh
)FIII
(α
h
)=
√2π
hα
tan(
π
2α
h
), (7)
respectively. The geometry factors in Eq. (7) are for aunit strip having a straight crack and err by no more than2% for any α/h.9 Furthermore, the torsional compliancecoefficient is obtained by substituting Eqs. (2), (6) and (7)into Eq. (4):
S66 = 8π E ′ R3
∫ b
−b
∫ α′
0α
[z2
[FII
(α
h
)]2
+ m(1 − z2) [
FIII
(α
h
)]2]dαdz, (8)
where the variables have been normalized with respect tothe shaft radius
α = α
R, α′ = α′
R, a = a
R, b = b
R, z = z
R, h = h
R(9)
for ease of integration, which must be donenumerically.
The above analysis can be extended to a shaft with a semi-elliptical crack having the geometry shown in Fig. 2(b)by employing the stress intensity factors determined byFonte and Freitas.10 The stress intensity factors are:
KII6 = 2Tπ R3
√π s FII (r, φ)
KIII6 = 2Tπ R3
√π s FIII (r, φ) , (10)
where s is half of the surface crack length and the geometryfactors FII(r, φ) and FIII(r, φ) depend on the depth of thecrack, a/R, its aspect ratio, a/b and position along the crackfront, which is described by the radial distance, r, andthe parametric angle, φ. Fonte and Freitas10 tabulate thegeometry factors for cracks having a constant ratio
as
= 2π
(11)
and crack depths ranging from a/R of 0.111 to 0.888 fromtheir 3-D FEA. We used regression analysis to deter-mine sixth order polynomial expressions for the geometryfactors,
FII (r, φ) = −3.482φ + 48.90rφ − 196.5r2φ + 379.4r3φ
− 356.7r4φ + 132.1r5φ + 0.9189φ3
− 10.73rφ3 + 17.52r2φ3 − 7.473r3φ3
− 0.1508φ5 + 1.749rφ5
FIII (r, φ) = −1.508 + 8.502r − 33.60r2 + 64.09r3
− 58.71r4 + 20.59r5 + 0.3322φ2 + 2.265rφ2
− 3.026r2φ2 + 1.341r3φ2
+ 0.02646φ4 − 1.352rφ4 (12)
which are accurate to within 5%. Mode III is the primarycrack growth mode for torsional loading and this is a sym-metric mode with respect to the parametric angle φ, whilemode II is a secondary mode that is antisymmetric. Themaximum value of FII occurs at the crack tips while themaximum value of FIII occurs at the centre of the crackfront. Finally, the torsional compliance coefficient is ob-tained by substituting Eqs. (2), (10) and (12) into Eq. (4):
S66 = 8E ′ R3
×∫ a
0
∫ φm
0r2[[FII (r, φ)]2 + m [FIII (r, φ)]2]dφdr,
(13)
where
a cos φm = 1 − cos(
π a2
)(14)
given the fixed crack geometry of Eq. (11) and r = r/R.
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

TORSION RESPONSE OF A CRACKED STAINLESS STEEL SHAFT 737
φa
b
crackfront
r
R
s
(b)
a
b
R
α'
h
crackfront
(a) z z
Fig. 2 Crack geometry for (a) straight crack front and (b) semi-elliptical crack.
Eqs. (8) and (13) represent the additional compliance ofthe shaft due to the presence of cracks having straightand semi-elliptical crack fronts, respectively. This enablesline shaft analysis by representing the crack as a discretespring having stiffness equal to the inverse of the compli-ance assuming that there is no significant coupling [seePapadopoulos and Dimarogonas4].
The additional compliance due to an open crack is shownin Fig. 3 for cracks having a straight crack front Eq. (8) aswell as cracks having a semi-elliptical crack front Eq. (13).Fig. 3(a) shows the compliance as a function of normal-ized crack depth, while Fig. 3(b) shows it as a function ofthe crack area ratio (crack surface area to πR2). It is appar-ent that straight cracks result in higher compliance thansemi-elliptical cracks regardless of whether crack depth orcrack area is used for the comparison. This is intuitive forFig. 3(a), but not for Fig. 3(b). Analysis of a semi-ellipticalcrack is limited by the stress intensity factors obtainedby Fonte and Freitas10 and the fact that Eq. (11) breaksdown as a approaches R. The analysis of a straight crackbreaks down for deep cracks due to inaccuracies in FII
and FIII; the compliance should approach infinity as thecrack depth approaches the diameter and the crack areaapproaches the shaft area.
Finite element analysis
A 3-D finite element model of the shaft section contain-ing a crack was created and analysed using the ANSYSsoftware package.11 The length of the shaft, L, is 12R andboth straight and semi-elliptical crack fronts are analysed.The crack plane contains two identical sets of nodes thatare linked together in the uncracked area and decoupledwithin the cracked area of the plane. Thirteen differentcrack depths ranging from 0 to 1.3R are analysed. Oneend of the shaft is completely restrained, while the other
end is constrained except for rotation about the z-axis anda torque, T , of 113 N-m (1 k-in) is applied there. Themodel for a straight crack front is shown in Fig. 4, wherethe solid elements are 20-node hexahedrals. The modelsize varied slightly with crack depth, but it has approxi-mately 4 220 elements and 16 850 degrees of freedom. Amesh convergence study on the model having the deepestcrack indicated that this model is sufficiently refined.
An elastic analysis was performed using the materialparameters determined experimentally in Section 4. Foreach crack depth, the nodal displacements Qi (x-direction)and Qi+1 (y-direction) around the circumference of theshaft at the end section are saved to compute the angle oftwist,
θ =(√
Q2i + Q2
i+1
)avg
R(15)
which is used to compute the stiffness of a discrete tor-sional spring representative of the crack
Ks = Tθ − θu
, (16)
where θu is the angle of twist that would occur in an un-cracked shaft. The source of Eq. (16) is that the total angleof twist is θ = θu + θ cr, where θ cr comes from the rela-tionship T = K sθ cr. Eq. (16) is also used for analysis of theexperimental results.
A finite element model of the benchtop rotor system,which is shown in Fig. 5 and described later, was devel-oped using ANSYS. Beam elements were used throughoutand a discrete torsional spring was used to represent thecrack. Except for the motor, properties of the system werecalculated based on mechanical dimensions and proper-ties. The motor properties were based on shaft drawings,rotor weights and dimensions from the manufacturer,augmented by some external measurements. This model
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

738 C. J. L I SSENDEN et al.
(a)
(b)
Fig. 3 Predicted torsional compliance for open shaft cracks as afunction of (a) crack depth and (b) crack area.
is used to back-calculate the discrete torsional springstiffness based on the experimentally determined naturalfrequencies.
E X P E R I M E N TA L P R O C E D U R E S
Static and dynamic experiments were conducted on shaftshaving either a fatigue crack or an open cut of variousdepths. This section describes the methods used to initiateand propagate fatigue cracks, make the cuts, measure the
torsional shaft stiffness and measure the first torsional nat-ural frequency of the benchtop vibration test stand neededto back-calculate the effective stiffness.
Seeded fault fatigue cracks
The ASTM E399 standard for fatigue precracking wasfollowed to seed fatigue cracks in the shaft specimens. Aservohydraulic MTS 810 test rig, controlled by Labviewsoftware, was used to apply and measure the force and dis-placement. An MTS 642.10B 3-point bend fixture havingan adjustable span length was used with the span lengthfixed at 152 mm as shown in Fig. 1. A sinusoidal wave-form with a 3 Hz frequency was applied through the loadchannel. The stress ratio was slightly greater than zero, asthe minimum load was approximately 90 N. A maximumload of 4.45 kN was found to initiate a fatigue crack in areasonable length of time (300 000–500 000 cycles). Cy-cling was halted once the displacement range per cycle orthe increase in the displacement range per cycle exceededpredefined limits. The surface crack length was then in-spected under load using a laboratory telescope. After thecracked shaft was statically and/or dynamically tested, thecrack depth was increased by further cycling using a lowermaximum load.
Fatigue crack characterisation
Fatigue cracks closed with removal of the load makingthem difficult to characterize. Three methods were used:visual observation of surface crack length under load, ul-trasonic evaluation of the cracked area and post morteminspection of beach marks on the fracture surface. A paperhaving a fine grid of tick marks was taped to the surfaceof the specimen to facilitate surface crack measurement.The cracked area fraction was estimated using ultrasonicguided wave time domain reflectometry via a 2.25 MHzlongitudinal transducer wedge-mounted to the shaft. Thewedge was designed to fit the shaft circumference andemit longitudinal waves generated by a pulser/receiver;these waves are reflected by the crack and the oppositeend of the shaft. Crack area percentage is calculated basedupon
AcA = Ca
Ca+Ba× 100%, where Ca and Ba are the amplitudes
of the waves, displayed on an oscilloscope, reflected fromthe crack and the opposite end, respectively. Motor oil wasused as a couplant between the transducer and the shaft.Beach marks on the fracture surface indicate changes inthe applied loading and are imaged on a flat bed scan-ner and digitized. The beach marks are believed to givethe most accurate representation of the crack front as itpropagates across the cross section.
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

TORSION RESPONSE OF A CRACKED STAINLESS STEEL SHAFT 739
Fig. 4 Finite element model of shaft crack.
Fig. 5 Benchtop test rig.
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

740 C. J. L I SSENDEN et al.
Seeded fault cuts
Straight slots were cut by wire electric discharge machin-ing for one shaft and by a bandsaw for two other shafts.The slot thickness was small relative to the shaft radius andthe surface faces were never in contact. The open natureof the cuts allowed the cut depths to be readily measured.
Static torsional stiffness measurement
The torsional stiffness, GJ∗, of shaft specimens was de-termined using an MTS 319 axial torsion test rig. Thestar superscript is used because the shaft may have a cutor crack and we do not mean to imply that the torsionalstiffness is the shear modulus times the polar moment ofinertia. Two fully reversed cycles of a triangular waveformwere applied in torque control at a rate of 2.26 N-m/s. Toensure a linear response, small amplitudes of 22.6 N-mand 11.3 N-m were used, depending on the depth of thecrack. Angle of twist was measured by an angular displace-ment transducer. The torque and angle of twist calibra-tions are 226 N-m/volt and 0.5 degrees/volt, respectively.The slope of the torque-angle of twist diagram, which isGJ∗/L, was determined by linear regression. Since 38 mmon each end of the shaft were inside a collet grip, the ef-fective length L was taken to be the shaft length minus76 mm.
Torsional natural frequency measurement
The first natural frequency of the shaft system was deter-mined using procedures described in detail elsewhere.12,13
A test rig was constructed to measure the torsional vi-bration of the cracked rotating shaft under controlledlaboratory conditions and is shown in Fig. 5. The shaftspecimen was mounted in bearings and rotated by a vari-able speed DC motor. An encoding wheel, with an outerdiameter of 90.8 mm and 180–3.2 mm deep teeth, wasconstructed to sense the torsional vibration. An infraredfibre optic intensity reflective transducer sensed the wheeltooth passage and tooth passage times were recorded andthen processed with specialized torsional vibration algo-rithms.14,15
R E S U LT S
All tests were conducted on 16 mm (5/8 inch) diame-ter AISI 316L stainless steel bar stock (AvestaPolarit heatD87581A). The Young’s modulus and shear modulus weremeasured by mechanical loading to be 185 GPa and 73.9GPa, respectively. Using these values in the E-G-ν rela-tionship for isotropic materials gives a Poisson’s ratio of0.255. The manufacturer certified the hardness as HRB92, yield strength as 394 MPa and ultimate strength as
1 mm
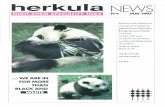
Fig. 6 Fracture surface of Shaft 6 showing beach marks indicating8 different types of bending load cycles (see Table 1).
650 MPa. A 0.25 mm deep v-notch having a 0.076 mmroot radius was machined into the mid-length with theedge of a milling machine tool (Fig. 1). The depth of thenotch was minimized to enable the experiments to assessthe effects of small fatigue cracks.
Fatigue crack characterization
The fracture surface obtained from three-point bendingfor Shaft 6 is shown in Fig. 6 where lines have been over-laid on the beach marks for clarity. These lines are por-tions of ellipses having a common centre point on theshaft surface at the centre of the notch. Eight beach marksare visible corresponding with the eight different loadingconditions shown in Table 1, which provides test data forseven shafts. The crack depth, a, is measured from Fig. 6and then the other ellipse axis, b, is obtained by visuallymatching ellipse to beach mark. The ellipse parameter es-timates were used to calculate the cracked area. Figure 7shows that the crack area increases as the crack depth in-creases with very little scatter between six different shafts,and that for crack depths 0.8 < a/R < 1.5 the increase isreasonably linear. Crack growth associated with Eq. (11)is observed to over-predict the crack area in these exper-iments. The crack aspect ratio, a/b, decreases from ap-proximately 1 to 1
2 as the crack depth increases (Fig. 8)indicating a decrease in curvature of the crack front asshown in Fig. 6.
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

TORSION RESPONSE OF A CRACKED STAINLESS STEEL SHAFT 741
Table 1 3-point bend test results
Shaft N (cycles) Pmax (N) Pmin (N) a (mm) b (mm) a/b a/R Ac/A
6 - - - 0.25 ∞ 0 0.032 0.0034363 500 4450 100 3.5 3.2 1.09 0.44 0.0848 000 4010 100 6.7 6.6 1.02 0.84 0.2521 000 3120 110 8.4 10.6 0.79 1.06 0.469500 2210 100 9.8 13.6 0.72 1.04 0.605500 1540 110 10.6 16.4 0.65 1.34 0.685000 1090 120 11.6 17.1 0.68 1.46 0.756250 740 110 12.4 22.9 0.54 1.56 0.812250 550 100 13.3 25.4 0.52 1.68 0.86
7 282 500 4470 120 4.0 4.4 0.91 0.50 0.1235 000 4010 100 6.4 6.4 1.00 0.80 0.2723 500 3120 100 8.6 9.8 0.88 1.08 0.4713 250 2220 100 10.0 12.4 0.81 1.26 0.616700 1560 120 11.1 14.4 0.77 1.40 0.704200 1110 140 11.9 16.2 0.73 1.50 0.784700 800 170 12.5 18.0 0.69 1.58 0.827000 550 180 13.3 22.4 0.59 1.68 0.88
14 460 400 4450 404700 3110 40 7.8 8.6 0.91 0.98 0.40
15 435 000 4450 40 6.8 7.2 0.94 0.86 0.3019 500 3110 40 8.4 9.2 0.91 1.06 0.4212 600 2220 40 9.4 11.2 0.84 1.08 0.53
16 427 000 4440 80 6.7 7.4 0.90 0.84 0.3121 000 3100 80 8.8 10.3 0.85 1.10 0.4911 000 2180 60 9.9 13.9 0.71 1.24 0.617000 1530 90 10.9 16.0 0.68 1.38 0.696000 1070 60 11.6 17.7 0.66 1.46 0.765000 780 130 12.3 21.6 0.57 1.54 0.827000 400 100 - - - -5000 500 140 13.2 23.8 0.55 1.66 0.88
17 365 500 4450 100 4.2 3.8 1.10 0.52 0.1227 000 4220 90 5.2 5.5 0.94 0.64 0.198500 4000 90 5.9 7.1 0.83 0.74 0.265000 3790 100 6.7 7.7 0.87 0.84 0.313000 3560 90 7.4 8.8 0.84 0.94 0.382250 3340 90 8.2 9.4 0.87 1.04 0.442000 3,100 90 8.8 10.2 0.86 1.10 0.493500 2670 100 9.5 12.0 0.79 1.18 0.563000 2220 100 10.2 13.4 0.76 1.28 0.63
18 391 500 4450 100 3.3 3.9 0.85 0.42 0.1222 500 4210 90 5.0 5.3 0.94 0.62 0.189600 3990 80 6.3 6.6 0.95 0.80 0.272150 3770 80 - - - - -7050 3550 80 7.9 9.5 0.83 1.00 0.423250 3330 90 8.3 10.5 0.79 1.06 0.462250 3110 90 - - - - -4000 2650 80 9.1 11.5 0.79 1.16 0.533000 2220 90 9.9 12.9 0.76 1.26 0.61
Non-destructive evaluation of the cracked area wasperformed between each increment in crack growth usingultrasonic inspection. The shaft was unloaded during eachultrasonic evaluation; therefore the crack was closed. The
comparison of the ultrasonic results for cracked area withthe beach marks for shafts 7 and 17 is shown in Fig. 9.Clearly, there is significant scatter in these data, which ismost likely to be associated with the closure of the crack.
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

742 C. J. L I SSENDEN et al.
Fig. 7 Measured relationship between crack area and crack depthfrom bending loads.
Fig. 8 Evolution of crack front with crack depth from bendingloads.
Quasistatic shaft stiffness
Quasistatic torsion tests as well as a limited number of ten-sion tests were conducted and the shaft effective stiffnesswas linearly regressed from the torque-angle of twist data(force displacement data for tension) to obtain,
ktorsion = GJ∗
L
ktension = E A∗
L,
(17)
Fig. 9 Comparison of crack area ratio determined by ultrasonicsand from beach marks on fracture surface from bending loads.
Fig. 10 Effective stiffness of shafts having fatigue cracks fromquasistatic tests.
where GJ∗ and EA∗ are the torsional stiffness and axialstiffness, respectively. The effective stiffnesses of Shafts7 and 17 are shown in Fig. 10 normalized with respectto their uncracked values, κ = GJ∗
GJ , (κ = E A∗E A for tension).
The torsional stiffness is not reduced as much as the tensilestiffness. Moreover, the effect of the crack is not appar-ent under quasistatic conditions until the cracked area isapproximately 60% of the shaft area. This is apparently
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

TORSION RESPONSE OF A CRACKED STAINLESS STEEL SHAFT 743
Fig. 11 Effective stiffness of cut and cracked shafts from quasistatictorsion tests, some with superimposed tension.
Fig. 12 Discrete torsional spring stiffness associated with acrack.
due to the crack being closed, if the torsional stiffnessmeasurement is performed in the presence of a constanttensile force that opens the crack, the torsional stiffness isreduced. The decrease in effective torsional stiffness dueto a crack is shown in Fig. 11. Results for Shaft 14, hav-ing a cracked area ratio of 0.4, and for Shaft 9, having acracked area ratio of 0.74, are shown for superimposedconstant tensile forces ranging from 0 to 26.7 kN. Once
the tensile force necessary to open the crack is applied,which could possibly be related to the stress intensity fac-tor to yield strength ratio, increasing that force has no fur-ther effect on the torsional stiffness. For example, Shaft 9having a cracked area ratio of 0.74 exhibited the same tor-sional stiffness for constant axial forces of 8.9 and 13.3 kN.Apparently, crack face interactions increase the torsionalstiffness relative to an open crack, see also Vaziri andNayeb-Hashemi6 for more details on the effect of crackclosure on the stress intensity factor.
Quasistatic torsion tests were used to determine the shaftstiffness, GJ∗. By assuming that the elastic deformation ofthe shaft and the displacement discontinuity due to thepresence of a crack act in series, the torsional stiffness ofthe crack can be computed using
Ks = GJL
κ
1 − κ. (18)
The value of K s ranges from infinity, when the shaft isuncracked, to zero, when the shaft is completely cracked(broken). The values of K s predicted from finite elementmodels of shafts having either open straight cuts or opensemi-elliptical cracks are shown in Fig. 12 as a function ofcrack depth. A straight cut has a larger cracked area than asemi-elliptical crack of the same depth, thus K s is initiallylarger for a semi-elliptical crack. But as the semi-ellipticalcrack grows, its curvature diminishes and K s approachesthat for a straight cut.
Finite element analysis of torsional vibration ofbenchtop system
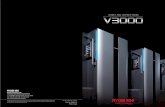
The natural frequencies and mode shapes of the bench-top rotor system were analysed by the line shaft finite el-ement model. A torsional spring was introduced into theshaft model at the location of the crack using Eq. (16).In the model the spring representing the crack is given aconstant torsional stiffness, when in reality it is probablyvariable due to opening and closing of the crack due torotating bending loads. Table 2 shows the predicted nat-ural frequencies for the first five torsional modes of thesystem as a straight cut of increasing depth is introduced(0 < a < 1.2R). The torsional natural frequency for mode1 demonstrates the greatest sensitivity to crack growth,while modes 3 and 5 show some sensitivity. Torsional fre-quencies of modes 2 and 4 are unaffected by the presenceof a crack at this location. Therefore, the dynamic analy-sis utilized mode 1. The mode shape for the first naturalfrequency is shown in Fig. 13 where a warped black planeis added for easier visualisation of the torsional angle oftwist.
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

744 C. J. L I SSENDEN et al.
Table 2 Natural frequencies of benchtop test rig with cut shaft
Experiment Shaft 24 Finite element analysis predicted frequency (Hz)
Slot Depth, a/R Stiffness, κ Mode 1 (Hz) Mode 1 Mode 2 Mode 3 Mode 4 Mode 5
0.0 1.00 152.42 146.46 335.14 405.97 2547.5 3072.90.2 1.00 152.31 146.34 335.13 405.96 2547.5 3072.90.4 1.00 152.29 146.21 335.13 405.89 2547.5 3072.70.8 0.985 150.95 145.46 335.10 405.48 2547.5 3071.61.2 0.946 146.59 143.28 335.03 404.31 2547.5 3068.4
Fig. 13 Uncracked benchtop shaft system mode shape for mode 1.
Experimental natural frequencies from benchtopsystem
The natural frequency of the first torsional mode of thebenchtop system is shown in Fig. 14 as a function of crackarea ratio. The symbols plotted are averages of 8–10 re-peated tests and error bars indicating the range of thesedata are also shown. It is impractical to have identical testsetups for each experiment because the shaft is removed,replaced and the system reassembled each time. This re-moval and re-assembly is required to increase the depthof the seeded fault. It is done before each repeated test toenable us to distinguish changes due to the seeded faultfrom scatter due to re-assembly. Differences between openstraight cuts and closed semi-elliptical fatigue cracks are
anticipated, but no difference is expected for two nearlyidentical cut shafts. However, differences for nearly iden-tical cut shafts (24 and 25) are apparent. These differencesmay be attributed to the different operators (graduate stu-dents) that conducted the tests.
Torsional stiffness comparison
Thus far the non-dimensionalized torsional stiffness, κ ,has been determined using four different methods: (1)quasistatic torsion test of a cracked shaft to obtain GJ∗
directly, (2) dynamic test on benchtop test rig to deter-mine natural frequency and iteratively back-calculate the
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

TORSION RESPONSE OF A CRACKED STAINLESS STEEL SHAFT 745
Fig. 14 Torsional mode 1 natural frequencies of cracked and cutshaft system.
torsional spring constant K s, (3) finite element model ofa portion of a cracked shaft, (4) inverse of the complianceobtained from an analytical model (Eqs. (8) and (13)).
The results from all four of these methods are comparedfor a straight crack front having depths a/R = 0.2, 0.4,0.8, 1.2 in Fig. 15(a) and for a semi-elliptical crack frontin Fig. 15(b). In both figures, the effective length is L =48R. In Fig. 15(a), the experimental results are for twodifferent shafts cut progressively with a band saw. Whilethere is scatter in the data, the agreement between modelsand experiments is reasonably good for these open cuts.The experimental results shown in Fig. 15(b) are for semi-elliptical fatigue cracks that exhibited closure, with theone exception being Shaft 9, in which the fatigue crackwas forced open for the quasistatic stiffness measurement.Figure 15(b) clearly shows that opening the Ac/A = 0.74crack with tension resulted in a reduction of torsional stiff-ness K from 0.945 to 0.919. Thus, for large cracks, Ac/A >
∼0.50, there is a significant difference between the FEApredictions for an open crack and the experimental resultsfor a closed crack. For smaller cracks, Ac/A < ∼0.50, thedifference is not apparent. The effect that a crack has onthe torsional stiffness of a shaft depends on the length ofthe shaft by,
κ = KsLKsL + GJ
(19)
which is obtained by re-arranging Eq. (18). For K s valuesobtained from the finite element model of a straight crackhaving depths of a/R = 0.4, 0.8 and 1.2, Eq. (19) is plottedin Fig. 16. As we expect, the crack has a much larger effecton short shafts.
(a)
(b)
Fig. 15 Comparison of predicted and measured torsional stiffnessfor (a) straight crack front, (b) semi-elliptical crack front.
D I S C U S S I O N A N D C O N C L U S I O N S
The maintenance of most equipment is schedule based.This can be very inefficient on the one hand and some-times ineffective on the other. The move to condition-based maintenance requires reliable monitoring ofequipment. Especially in the power generation industry,where equipment often operates continuously, this canbe challenging. Consider for example, pump shafts; cur-rent monitoring technology uses proximity probes to trackdeflection of the shaft. Since cracking and other damagemodes affect the stiffness of the shaft, and stiffness af-fects the deflection, deflection measurement is one meansto track possible damage. However, deflection is also
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

746 C. J. L I SSENDEN et al.
Fig. 16 Torsional stiffness as a function of shaft length for variouscrack depths predicted by finite element model with straight crackfront.
affected greatly by the boundary conditions (bearings) soincreased deflection is not necessarily due to damage to theshaft. Torsion frequencies can also be monitored duringoperation and are also dependent upon stiffness and cantherefore indicate shaft damage. In addition, they appearto be less influenced by the boundary conditions. Thus,the torsional stiffness and torsional natural frequenciesof a shaft have been studied using analytical modelling, fi-nite element modelling and laboratory experiments in thiswork. Technologically important findings are as follows.
� No significant decrease in torsional stiffness was observedfor quasistatic loading of shafts containing closed fatiguecracks smaller than approximately a/R = 0.4, while dynamictests indicated a gradual decrease in natural frequency, andtherefore torsional stiffness, over the entire range of seededfault sizes. This suggests that operation of the shaft system,in this case the benchtop system, is sufficient to overcomecrack closure residual stresses and provide a more sensi-tive indication of stiffness loss due to crack growth thanquasistatic loading.� Quasistatic torsion tests on shafts with fatigue cracks thatexhibit crack closure do not exhibit the same amount ofstiffness reduction as shafts with open cuts unless a ten-sile force is applied to open the crack. There exists a crit-ical tensile force to fully separate the crack faces; largersuperimposed tensile forces do not result in lower tor-sional stiffness, but may cause crack growth or gross plasticdeformation.
� Polynomial expressions for FII and FIII Eq. (17) were re-gressed to data obtained from the FEA of Fonte andFrietas10 for a/R ratios of 0.111–0.888.
Acknowledgements
This work was supported by the Electric Power ResearchInstitute (EPRI Contract EPP9801/C4961). The contentof the information does not necessarily reflect the positionor policy of the EPRI, and no official endorsement shouldbe inferred.
Thanks to Michael Pedrick for performing the ultrasonicevaluations.
Thanks to Dennis Bieryla and Jonathan Hasker forsetting up and running dynamic tests on the benchtopsystem.
R E F E R E N C E S
1 United States Nuclear Regulatory Commission. (2005)Monitoring vibration to detect circumferential cracking of reactorcoolant pump and reactor recirculation pump shafts. NRCInformation Notice 2008–08, Office of Nuclear ReactorRegulation, Washington DC, USA.
2 Szaz, G. and Guindon, E. J. (2003) Using torsional vibrationspectra to monitor machinery rotor integrity. Proceedings of theASME 2003 International Joint Power Conference, ASME PaperNo. IJPGC2003–40162, Atlanta, GA, USA.
3 Maynard, K. P. and Trethewey, M. W. (1999) On the feasibility ofblade crack detection through torsional vibration measurements. 53rdMeeting of the Society for Machinery Failure PreventionTechnology. Virginia Beach, Virginia, USA.
4 Papadopoulos, C. A. and Dimarogonas, A. D. (1987). Couplingof bending and torsional vibration of a cracked Timoshenkoshaft. Ingenieur-Archiv. 57, 257–266.
5 Papadopoulos, C. A. (1994). Torsional vibrations of rotors withtransverse surface cracks. Computers & Struct. 51, 713–718.
6 Vaziri, A. and Nayeb-Hashemi, H. (2005). The effect of cracksurface interaction on the stress intensity factor in Mode IIIcrack growth in round shafts. Engng. Fract. Mech. 72, 617–629.
7 Vaziri, A. and Nayeb-Hashemi, H. (2006). A theoreticalinvestigation on the vibrational characteristics and torsionalresponse of circumferentially cracked turbo-generator shafts.Int. J. Solids Struct. 43, 4063–4081.
8 Papadopoulos, C. A. and Dimarogonas, A. D. (1987). Coupledlongitudinal and bending vibrations of a rotating shaft with anopen crack. J. Sound Vib. 117, 81–93.
9 Tada, H. and Paris, P. C. (1973). The Stress Analysis of CracksHandbook, Del Research Corporation, Hellertown,Pennsylvania, USA.
10 Fonte, M. and Freitas, M. (1999). Stress intensity factors forsemi-elliptical surface cracks in round bars under bending andtorsion. Int. J. Fatigue 21, 457–463.
11 ANSYS, Inc. (2006). ANSYS 10.0, www.ansys.com (viewed04/10/06).
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747

TORSION RESPONSE OF A CRACKED STAINLESS STEEL SHAFT 747
12 Maynard, K. P. and Trethewey, M. W. (2001) Application oftorsional vibration measurement to blade and shaft crack detection inoperating machinery. Maintenance and Reliability Conference.Gatlinburg, Tennessee, USA.
13 Bieryla, D. J., Trethewey, M. W., Lissenden, C. J., Lebold, M.S. and Maynard, K. P. (2005) Shaft Crack Monitoring viaTorsional Vibration Analysis; Part 1 – Laboratory Tests. 23ndInternational Modal Analysis Conference, Orlando, FL, USA.
14 Groover, C. L., Trethewey, M. W., Maynard, K. P., Lebold, M.S. (2005). Removal of order domain content in rotatingequipment signals by double resampling. Mech Syst SignalProcess. 19, 483–500.
15 Resor, B. R., Trethewey, M. W., Maynard, K. P. (2005).Compensation for encoder geometry and shaft speed variationin time interval torsional vibration measurement. J. Sound Vib.286, 897–920.
c© 2007 The Authors. Journal compilation c© 2007 Blackwell Publishing Ltd. Fatigue Fract Engng Mater Struct 30, 734–747