
Symbolic Methods and AceGen - unipv Methods and AceGen JožeKorelc ... xxx x LLL L fu ... Pavia,...
55
Symbolic Methods and AceGen Jože Korelc University of Ljubljana, Slovenia Mercator Visiting Professor at Leibniz Universität Hannover
Transcript of Symbolic Methods and AceGen - unipv Methods and AceGen JožeKorelc ... xxx x LLL L fu ... Pavia,...

Pavia, 2011 1
Symbolic Methods and AceGen
Jože KorelcUniversity of Ljubljana, Slovenia
Mercator Visiting Professor at Leibniz Universität Hannover

Pavia, 2011 2
Computational Solution Environments
• General problem solving environment (PSE)– general solvers for ODE‐s or PDE‐s– user templates are provided for certain class of problems ‐
ELLPACK, DIFPACK, SCIRun, FlexPDE– numerical libraries with compiled functions ‐ NAG– interactive numerical environments ‐MATLAB, FEMLAB– symbolic systems Mathematica, Maple
• Object oriented environments– collection of objects, clases, methods– DIFPACK, FEMTheory
• Specialized finite element enviroments– ABAQUS, FEAP, ANSYS, ...
• Hybrid approaches

Pavia, 2011 3
Hybrid approaches
• Steering application provides interfaces to the tools– Alice, SCIRun– popular for multi‐physics, multi‐field
• Hybrid object‐oriented approach– domain‐specific language– built‐in C++ libraries for symbolic manipulation and AD– FeniCS, FreeFem++
• Hybrid symbolic–numeric approach– general computer algebra system for code generation– general finite element environment– AceGen, AceFEM
Pavia, 2011 4
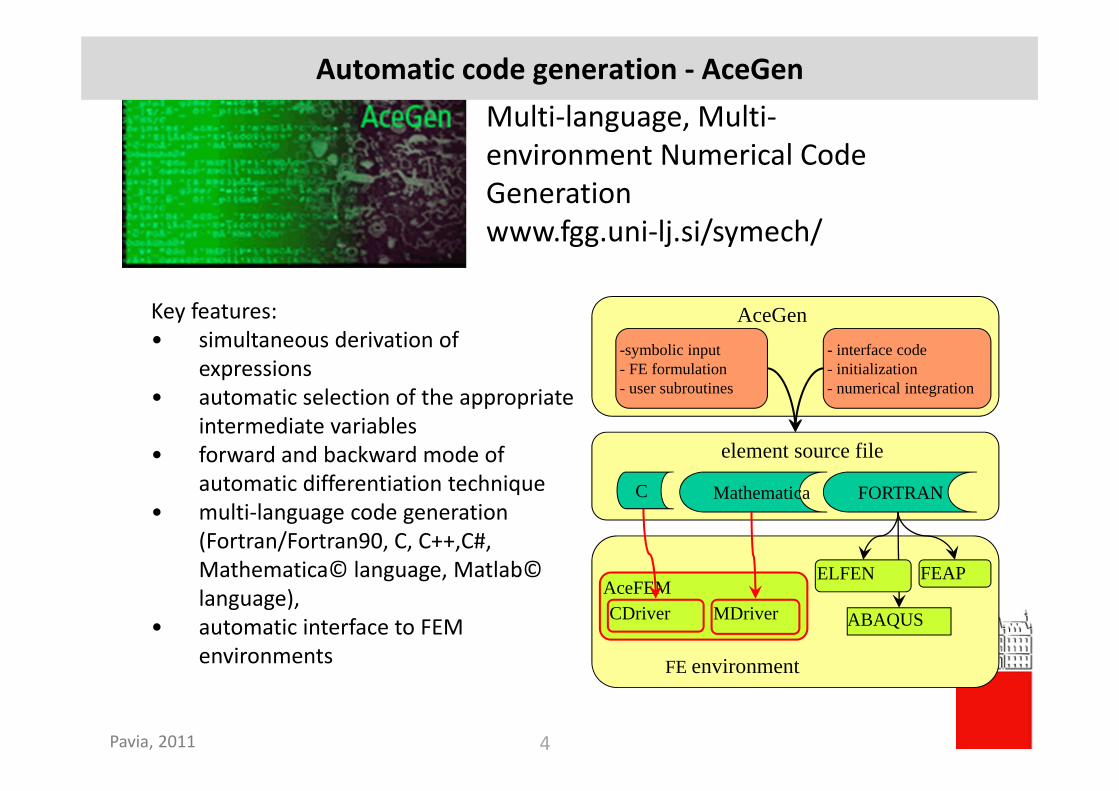
Multi‐language, Multi‐environment Numerical Code Generationwww.fgg.uni‐lj.si/symech/
Key features:• simultaneous derivation of
expressions• automatic selection of the appropriate
intermediate variables• forward and backward mode of
automatic differentiation technique• multi‐language code generation
(Fortran/Fortran90, C, C++,C#, Mathematica© language, Matlab© language),
• automatic interface to FEM environments
C FORTRANMathematica
element source file
AceFEMCDriver
FEAPELFEN
MDriver ABAQUS
FE environment
AceGen-symbolic input- FE formulation- user subroutines
- interface code- initialization- numerical integration
Automatic code generation ‐ AceGen

Pavia, 2011 5
<< AceGen`;SMSInitialize@"filename",
"Language" −> "Mathematica"D;SMSModule@"Gradf", Real@u$$@3D, x$$, L$$, g$$@3DDD;8x, L< ¢ 8SMSReal@x$$D, SMSReal@L$$D<;uh ¢ SMSReal@Table@u$$@iD, 8i, 3<DD;
Nh £ 9x
L, 1 −
x
L,x
L1 −
x
L=;
u £ Nh.uh;
f £ u2;
g £ SMSD@f, uiD;SMSExport@g, g$$D;SMSWrite@D;
Multi‐language code generation
1. Mathematical description
3. Automatically generated code
SUBROUTINE Test(v,u1,x,L,g)REAL*8 v(500),u1(3),x,L,g(3)v(6)=x/Lv(7)=1d0 - v(6)v(8)=v(6)*v(7)v(12)=2d0*(u(1)*v(6) +
- u(2)*v(7) + u(3)*v(8))g(1)=v(12)*v(6)g(2)=v(12)*v(7)g(3)=v(12)*v(8)END
"Fortran"
3
1
2
ˆ ˆ
ˆ ,1 , (1 )
?
i ii
u N u
x x x xL L L L
f u
f
=
=
= − −
=∇ =
∑
N
void Test(double v[501],double u1[3],double *x,double *L,double g[3])v[6]=*x/*L;v[7]=1e0 - v[6];v[8]=v[6]*v[7];v[12]=2e0*(u[0]*v[6] +u[1]*v[7]+ u[2]*v[8]);
g[0]=v[12]*v[6];g[1]=v[12]*v[7];g[2]=v[12]*v[8];;
"C++"Test[]:=Module[,$VV[6]=x$$/L$$;$VV[7]=1 - $VV[6];$VV[8]=$VV[6]*$VV[7];$VV[12]=2*(u$$[1]*$VV[6] +
u$$[2]*$VV[7]+u$$[3]*$VV[8]);g$$[1]=$VV[6]*$VV[12];g$$[2]=$VV[7]*$VV[12];g$$[3]=$VV[8]*$VV[12];]
"Mathematica"
"Fortran""C""Mathematica"

Pavia, 2011 6
Multi‐environment code generation
FEAP AceFEM
subroutine elmt10(d,ul,xl,ix,tl,s,p,& ndfe,ndme,nste,isw)implicit noneinclude 'sms.h'logical DEBUG,symmetriccharacter*50 SELEM,datades(0),postdes(0)parameter (DEBUG=.false.,.....End
SUBROUTINE SKR10(v,d,ul,ul0,xl,s,p,ht,hp)IMPLICIT NONEinclude 'sms.h'DOUBLE PRECISION v(5001),d(0),ul(2,4),& ul0(2,4),xl(2,4),s(8,8),p& (8),ht(*),hp(*)s(1,1)=1d0END
#include "sms.h"void SKR(double v[501],ElementSpec *es,ElementData *ed,NodeData **nd,double *rdata,int *idata,double*p,double **s);__declspec(dllexport) void SMTSetElSpec(ElementSpec *es,int *idata,int *ic,double *gd) static int pn[5]=1, 2, 3, 4, 0; static int dof[4]=5, 5, 5, 5; static char *gdcs[]="Const 1","Const 2"; static char *gpcs[]="";static char *npcs[]=""; es->Code="test";es->id.NoDimensions=2;es->id.NoDOFGlobal=20; es->id.NoDOFCondense=0;es->id.NoNodes=4; es->id.NoGroupData=2;es->id.NoSegmentPoints=5; es->id.IntCode=*ic;es->id.NoElementData=0; es->Segments=pn;es->DOFGlobal=dof;es->Data=gd; es->id.NoGPostData=0;es->id.NoNPostData=0; es->id.SymmetricTangent=1; es->IntPoints=SMTIntPoints(ic);es->id.NoTimeStorage=0; es->Topology="Q1";es->GroupDataNames=gdcs; es->GPostNames=gpcs;es->NPostNames=npcs;es->user.SKR=SKR;;
void SKR(double v[501],ElementSpec *es,ElementData *ed,NodeData **nd,double*rdata,int *idata,double *p,double **s)p[0]=nd[0]->X[0];;
<<AceGen`;SMSInitialize["test",
"Environment"→"AceFEM"];SMSTemplate["SMSTopology"→"Q1"];SMSStandardModule["Tangent and residual"];SMSExport[1,s$$[1,1]];SMSWrite[];
<<AceGen`;SMSInitialize["test",
"Environment"→"FEAP"];SMSTemplate["SMSTopology"→"Q1"];SMSStandardModule["Tangent and residual"];SMSExport[1,s$$[1,1]];SMSWrite[];
Suplementaryroutines
usersubroutines

Pavia, 2011 7
Mathematica
Expression optimization

Pavia, 2011 8
Simultaneous optimization of the expressions
• expressions are optimize immediately after they are derived• special procedures are needed for non-local operations• appropriate for large problems where also intermediate results
can be subjected to the uncontrolled swell of expressions
Original matrixResult is optimized matrix, expressed with the new auxiliary variables
Vector of 7 new auxiliary variables:
63 2
33 3
1 2 1 2 1 212 6 4, ,
2, , , ,
v v v v v vE I
vLv
vv v
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬−⎪ ⎪⎪ ⎪⎩ ⎭
4 5 4 5
5 6 5 70
4 5 4 5
7 65 5
v v v v
v v v v
v v v v
v vv v
⎡ ⎤⎢ ⎥⎢ ⎥−⎢ ⎥= ⎢ ⎥− −⎢ ⎥⎢ ⎥− ⎥⎦
−
−
⎢⎣
K
3 2 3 2
2 2
3 2 3 2
2
0
2
12 6 12 6
6 4 6 2
12 6 12 6
6 2 6 4
EI EI EI EI
L L L LEI EI EI EI
L LL LEI EI EI EI
L L L LEI EI EI EI
L LL L
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
− − −
−
−
−
K
AceGen
Optimized matrix

Pavia, 2011 9
Automatic theorem provingHow to prove arbitrary (mathematical) statement automatically ?
KKKIKK
1
1
2=•
=•−
−
//Automatic theorem proving is essential when large expressions derived by a symbolic system need to be simplified.
General symbolic matrices A and B:

Pavia, 2011 10
Deterministic methods
• general solution is not available• statements that can be expressed as a system of algebraic
equations– statement is correct if the corresponding system of algebraic equations has a
solution– Grobner bases
• technique provides algorithmic solution to a system of algebraic (polynomial) equations• Grobner bases are computed by the Buchberger´s algorithm• Buchberger´s algorithm is equivalent to Gauss elimination for the system of polynomial equations
• Mathematica

Pavia, 2011 11
• Numerical identification of relations between expressions– the simplest way of automatic theorem proving– the problem of equivalence testing is determining whether two
expressions (different in appearance) are indeed mathematically the same.
• The correctness can be numerically determined only with a certain degree of probability
Heuristic methods
?0)1)(1(1)( 5510 =+−+−= xxxxf022)( 5 ≠−= xxf
x^10 − 1 + H1 − x^5L Hx^5 + 1L êê Expand0
x^10 − 1 + H1 − x^5L Hx^5 + 1L ê. x → RandomReal@D−1.11022×10−16

Pavia, 2011 12
Signature functions
Possible signature functions:1. every expression is mapped into an integer of arbitrary length
– complex implementation– general method
2. every expression is evaluated with the set of real randomnumbers of arbitrary precission
Numerical identification of relations between set of expressions
1 1
2 2 1
1 1
0 :
1 : ( )
2 : ( , )
....
: ( , ,..., )n n n
x
y f x
y f x y
n y f x y y −
==
=
0
1 0
2 0 1
1 2 1
0 : ( ) ...
1 : ( )
2 : ( , )
....
: ( , , )n n
S S x randomsignature
S S S
S S S S
n S S S S S −
===
=
⎩⎨⎧
≡⇒=≠⇒≠
=−jk
jkjk yy
yySS
00
with a probability that canbe tuned

Pavia, 2011 13
Heuristic code optimization
Probability of wrong simplification is for this case is defined by:
• probability that polynomial equation has roots on interval
• floating point precision
- 4 - 2 2 4
- 5
5
10
15
critical x where simplification fails]4,4[
||
12
2
231
−∈+=
+−=
xxxf
xxf
Example 1:

Pavia, 2011 14
Mathematica
Auxiliary variables

Pavia, 2011 15
Assignment operators
<< AceGen`;SMSInitialize@"test",
"Language" −> "Mathematica"D;SMSModule@"test", Real@x0$$, r$$DD;x0 ¢ SMSReal@x0$$D;x • x0;
SMSDoBf £ x2 + 2 SinAx3E;
dx £ −f
SMSD@f, xD;
x § x + dx;SMSIf@Abs@dxD < 10^−10,SMSBreak@D;D;
SMSIf@i == 15, SMSReturn@D;D;
, 8i, 1, 30, 1, 8x<<F;SMSExport@x, r$$D;SMSWrite@D;
Four additional assignment operators in AceGenreplace the standard Mathematica assignment operator lhs=rhs
General algorithm

Pavia, 2011 16
SMSIf@x ≥ 0Dy • x2;SMSElse@D;y § Sin@xD;SMSEndIf@yD;
"If" construct
Conditional statements
auxiliary variable 3y ($V[i,3])
auxiliary variable 1y ($V[i,1])
auxiliary variable 2y ($V[i,2])
2 0
( ) 0
x xy
Sin x x
⎧⎪ ≥⎪= ⎨⎪ <⎪⎩
y = IfAx ≥ 0
, x2
, Sin@xDE
y £ SMSIfAx ≥ 0
, x2
, Sin@xDE
Mathematica input
In-cell AceGen input
Cross-cell AceGen input

Pavia, 2011 17
y • 0;SMSDo@ i, 1, n, 1, yD;y § y + xi;SMSEndDo@yD
• "Do" construct
Loops
1
ni
i
y x=
= ∑Mathematica input
In-cell AceGen input
Cross-cell AceGen input
1y2y
3y
4y
y = 0; n = 10;
DoAy = y + xi;, 8i, 1, n, 1<
E;
y • 0;
SMSDoAy § y + xi;, 8i, 1, n, 1, y<
E;

Pavia, 2011 18
Automatic Differentiation
Pavia, 2011 19
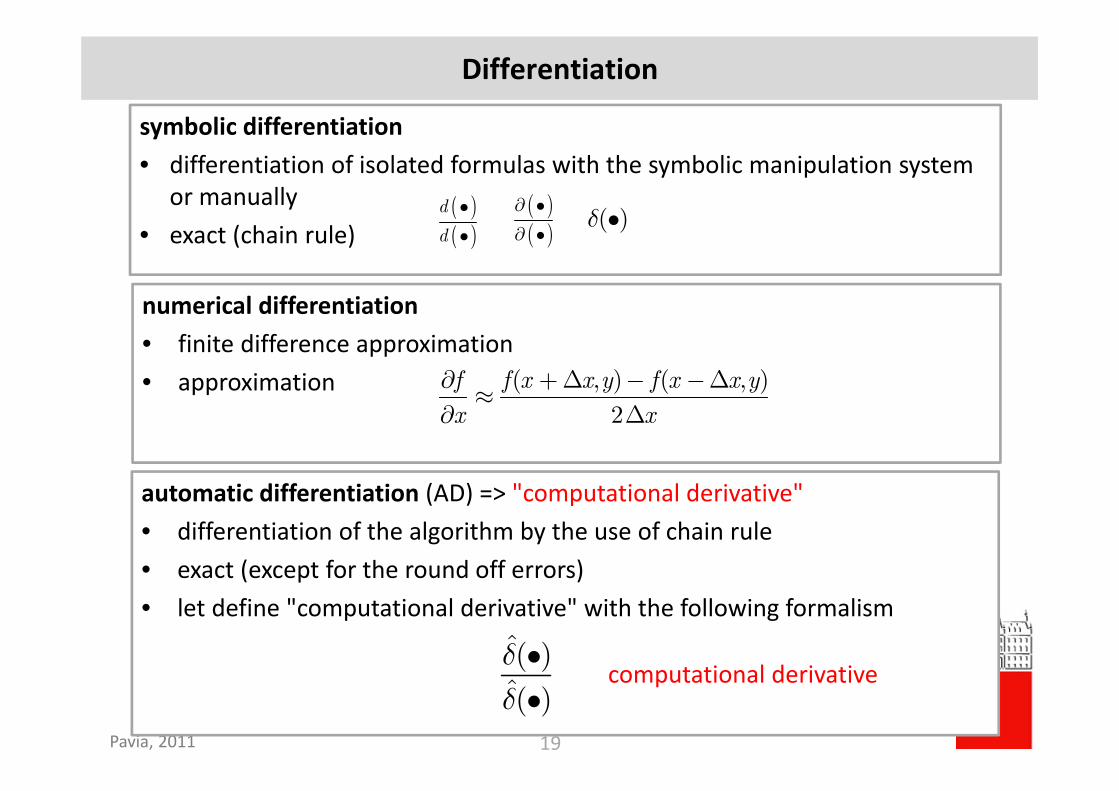
Differentiation
numerical differentiation• finite difference approximation• approximation ( , ) ( , )
2f f x x y f x x yx x
∂ +Δ − −Δ≈
∂ Δ
automatic differentiation (AD) => "computational derivative"• differentiation of the algorithm by the use of chain rule• exact (except for the round off errors)• let define "computational derivative" with the following formalism
( )
( )
δδ••
symbolic differentiation• differentiation of isolated formulas with the symbolic manipulation system
or manually• exact (chain rule)
( )( )
∂ •
∂ •( )( )d
d
•
•( )δ •
computational derivative

Pavia, 2011 20
Automatic differentiation
• Automatic differentiation technique (AD):– differentiation of the whole program– automatic differentiation tool generates a program code for the
derivative from a program code for the basic function– control structures (If, Do,..) are left unchanged
• Two basic methods of AD:– forward mode of AD
• standard "chain rule" on a level of the algorithm
– backward mode of AD• also named: reverse mode, inverse method, adjoint code construction, adjoint sensitivity, ....

Pavia, 2011 21
Forward versus backward mode
2
1
1 :
2 : ( )
3 :
l
n
l
b x
c Sin b
y bc
=
=
==
∑
2 ; 1,2,...,
( ) ; 1,2,...,
; 1,2,...,
ll
ll
l ll
dbb x l n n
dxdc
c Cos b b l n ndxdy
y b c b c l n ndx
⎧ ⎫⎪ ⎪⎪ ⎪∇ = = =⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭⎧ ⎫⎪ ⎪⎪ ⎪∇ = = ∇ =⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭⎧ ⎫⎪ ⎪⎪ ⎪∇ = = ∇ + ∇ =⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
1 1
1
( ) 1
2 ; 1, 2, ...,l ll l
dyy
dydy y
c y b ydc cdy y c
b y c cy Cos b cdb b bdy b
y x b x b l n ndx x
= =
∂= = =
∂∂ ∂
= = + = +∂ ∂
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪∂⎪ ⎪ ⎪ ⎪∇ = = = = =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪∂⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
forward mode
2
1
1 :
2 : ( )
3 :l
n
l
y bc
c Sin b
b x=
==
= ∑
vector of independentvariables y( ) dependent variable y=?n− − ∇x x
- adjoint values, ,y c breversal of the flow of the program
backward mode

Pavia, 2011 22
Efficiency of automatic differentiation
• wratio(f) ‐ work ratio
• cost(f) ‐ the number of arithmetic operations for evaluating f
• cost(f,∇f) ‐ the number of arithmetic operations for evaluating f and it´s gradient with n components
cost( , )( )
cost( )f f
wratio ff∇
=
backward mode• "If care is taken in handling quantities which are common to the function
and derivative, the cost ratio is usually around 1.5, not n+1" (Wolfe, 1982)
• formal proof by Baur and Strassen (1983) ( ) 5wratio f <
forward mode
• Computational cost proportional to n ( ) ( 1)wratio f nα≈ +

Pavia, 2011 23
Implementation of AD
• Source‐to‐source translator– original source is transformed into derivative code– compile‐time solution– ADIFOR, Odyssee, TAMC– minimal changes in original code (declaration of input and output
variables)
• Operator overloading– modern compilers accept user‐defined data types and operator
overloading– run‐time solution– low numerical efficiency– ADOL‐C
( )a b a b+ ⇒ ∇ +

Pavia, 2011 24
Automatic differentiation in AceGen
AceGen enhancements with respect to the standard ADtechnique:
• AD procedure can be initiated at any time and at any point andas many times as required within the same user subroutine
• AD as code‐to‐code translator consistently extends currentcode rather than produce a new one
• the results of all previous uses of AD have to be accounted forwhen AD is used several times
• mechanism to include exceptions within the AD procedureeasily
Pavia, 2011 25
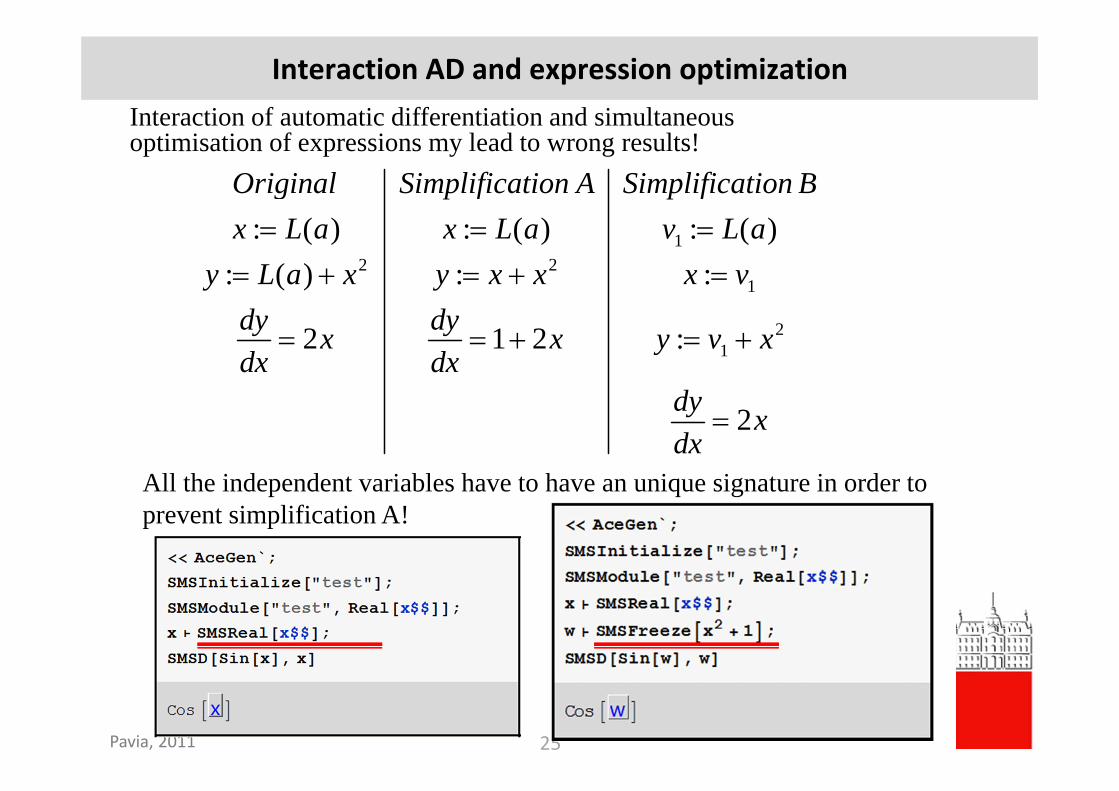
Interaction AD and expression optimizationInteraction of automatic differentiation and simultaneousoptimisation of expressions my lead to wrong results!
12 2
1
21
: ( ) : ( ) : ( ): ( ) : :
2 1 2 :
2
Original Simplification A Simplification Bx L a x L a v L a
y L a x y x x x vdy dyx x y v xdx dx
dy xdx
= = == + = + =
= = + = +
=
All the independent variables have to have an unique signature in order to prevent simplification A!

Pavia, 2011 26
• How to translate mathematical formalisms into AD procedure?• partial, total, directional, Lee, covariant, consistent, …• various notations
• Extended automatic differentiation technique (Korelc, 2002)• Control of "exceptions" in AD is crucial to relate to mathematical
formalisms
Automa c differen a on Exceptions
AD produces values of derivatives of what is actually computed, rather than what one intends to compute.
( )( )
∂ •∂ •
( )( )
DD
••
( )δ •

Pavia, 2011 27
AD Exception
Formalism for introduction of AD exceptions
... independent variables
... intermediate variables
( , ( )) ... function
... arbitrary matrix
ˆ ( , ( )): ˆ D
D
f
ff
δδ =
∇ =bM
a
aba b aM
a b aa
( , ( ))f a b a
a
b
program flow
back propagation of AD adjoints
DD
=b
Ma
f∇
definitionof AD exceptions
f £ SMSD@f@a, bD, a, "Dependency" → 8b, a, M<DAceGen input - option "Dependency"

Pavia, 2011 28
Local/Global definition of AD exception
• Local AD exception– AD exception is introduced when AD procedure is executed
• Global AD exception– AD exception is introducued together with intermediate
variables b
: ( )
ˆ ( , ( )): ˆ
DD
Af
fδ
δ
==
∇ =
bM
ab G a
a b aa
ˆ ( , ( )): ˆA
DD
ff
δδ =
∇ =bM
a
a b aa
a ¢ SMSReal@a$$Db ¢ SMSFreeze@G@aDDf £ SMSD@f@a, bD, a, "Dependency" → 8b, a, M<D
a ¢ SMSReal@a$$Db ¢ SMSFreeze@G@aD, "Dependency" → 8a, M<Df £ SMSD@f@a, bD, aD

Pavia, 2011 29
Types of AD exception
The basic situations that have to be considered are:A. Basic case: The total derivatives of intermediate variables a with respect to
independent variables b are set to be equal to matrixM.
B. Special case: There exists explicit dependency between variables that has to be neglected for the differentiation
C. Implicit case: There exists implicit dependency between variables that has to be considered for the differentiation
D. Generalization: The total derivatives of intermediate variables a with respect to intermediate variables c are set to be equal to matrixM.
ˆ ( , ( )):
( )BDD
ff
δδ =
∇ =b0
a
a b aa
ˆ ( , ( ( ))):
ˆDDD
ff
δδ =
∇ =bM
c
a b c aa
ˆ ( , ( )):
ˆADD
ff
δδ =
∇ =bM
a
a b aa
ˆ ( , ):
ˆCDD
ff
δδ =
∇ =bM
a
a ba

Pavia, 2011 30
• AD can "see" only explicit dependencies!
• implicit dependency between variables has to be specified as exception in AD
AD Exception Type C
a
bAD exception
DD
=b
Ma
back propagation of AD adjoints
( )f b
program flow
ˆ ( , ): ˆ D
D
ff
δδ =
∇ =bM
a
a ba
f∇

Pavia, 2011 31
Nonlinear mapping from reference coordinates to initial coordinates in FEM
Example ‐ exception Type C
, , reference coordinates
( ) ( ) actual coordinates
( ) ( ) displacements
displacement gradient
k kk
k kk
N
N
ξ η ζ==
=
∂=
∂
∑∑
X X
u u
uX
ΞΞ Ξ
Ξ Ξ
H
ˆ ( ): 0 wrong AD formulationˆ ( )
δδ
= =ΞΞ
uH
X
correct AD formulation1( )
ˆ ( ): 0ˆ D
D
δδ −⎡ ⎤∂⎢ ⎥=⎢ ⎥∂⎣ ⎦
= ≠X
XΞ Ξ
Ξ
ΞuH
X
ADB notationautomatic differentiation based notation
SMSD[u,X,"Dependency"->Ξ,Inverse[SMSD[X,Ξ]]
Higher level symbolic language (Mathematica + AceGen)

Pavia, 2011 32
ADB form and AceFEM

Pavia, 2011 33
Finite element solution procedure
1. strong form of boundary‐value problem2. weak form
3. FE approximation of field variables4. enforcement of local constraints5. element quantities (K, R, …)6. programming of steps 3, 4,5
7. generation of mesh and boundary conditions8. contact search algorithm9. solution of the global problem10. presentation and analysis of results
Automation of formulationat the individualelementlevel
( )
( )
( ) 0
...
1...
2
T
T
k Q
k Q d
k d
φ
δ δφ φ δφ
φ φ
Ω
Ω
∇ ∇ + =
Π = ∇ ∇ − Ω −
Π = ∇ ∇ Ω −
∫
∫
,
i i
ii
ii j
j
N
R
RK
φ φ
φ
φ
=∂Π
=∂∂
=∂

Pavia, 2011 34
ADB Notation
• ADB (Automatic Differentiation Based) form of computational model
• ADB form bridges mathematical notation of computational models and actual computer implementation.
• ADB form can be directly translated into the program code and the derived program code is numerically efficient.
The unification of the classical mathematical notation of computational models and the actual computer implementation can be achieved by means of automatic differentiation combined with the automatic code generation.
Automatic differentiation+ AD exceptions
ADB(Automatic Differentiation Based) form of computational model

Pavia, 2011 35
Problem is defined by:• Hyperelastic strain energy function
• FE approximation of coordinates and displacements– Nonlinear mapping from reference coordinates to initial coordinates
Example: 3D hyperelastic element
, , reference coordinates
( ) ( ) actual coordinates
( ) ( ) displacements
k kk
k kk
N
N
ξ η ζ==
=
∑∑
X X
u u
ΞΞ Ξ
Ξ Ξ
ˆ ( ): 0 wrong ADB notationˆ ( )
δδ
= =ΞΞ
nH
X
1( )
ˆ ( ): 0ˆ D
D
δδ −⎡ ⎤∂⎢ ⎥=⎢ ⎥∂⎣ ⎦
= ≠X
XΞ Ξ
Ξ
ΞuH
X
Higher level symbolic language (Mathematica + AceGen)
2( 3)
( 1) ( ( ))2 2
trW det Log det
λμ
−= − + −
= +∂∂
I
CF F
F Hu
H =X
SMSD[u,X,"Dependency"->Ξ,Inverse[SMSD[X,Ξ]]
Automation

Pavia, 2011 36
ADB form: Hyperelastic material ‐ A1 2 , ,..., vector of elements generalized d.o.f.
W( ) hyperelastic strain energy function
the contribution of the e-th element to the global residual
integration point contribution of the resid
e n
e
e
g
p p p=pp
RR ual of the e-th element
ˆ ( ): ˆ
eg g
e
WJ
δ
δ=
pR
p
(A) Solution is a stationary point of the hyperelastic potential
( )eg g
e
WJ
∂=
∂p
Rp
Automation
e g gg
w= ∑R R
int
e e
e W dV WdVδΩ Ω
Π = →∫ ∫
( )
e
T Tee g g e g g
g ge
WWdV J w wδ δ δ
Ω
⎡ ⎤ ⎡ ⎤⎛ ⎞∂ ⎟⎜⎢ ⎥ ⎢ ⎥⎟≈ =⎜ ⎟⎢ ⎥ ⎢ ⎥⎜ ⎟⎜ ∂⎝ ⎠⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦∑ ∑∫
pp p R
p
int 0ext δΠ = Π + Π → Π =

Pavia, 2011 37
ADB form: Hyperelastic material ‐ B
(B) Virtual work principle
( )int
e
e g gg
dV J wδ δ δΩ
Π = ⋅ ≈ ⋅∑∫ P F P F
( )eg g
e
J∂
= ⋅∂
F pR P
p
( )ee
e
δ δ∂
=∂
F pF p
p
ˆ: ˆWδδ
=PF
int 0extδ δ δΠ = Π + Π =
W∂=
∂P
F
( )int eT Te e g g e g g
g ge
J w wδ δ δ⎡ ⎤ ⎡ ⎤∂⎢ ⎥ ⎢ ⎥Π ≈ ⋅ =⎢ ⎥ ⎢ ⎥∂⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦∑ ∑
F pp P p R
p
Automation
ˆ: ˆg g
e
Jδδ
= ⋅F
R Pp

Pavia, 2011 38
Numerical cost : Hyperelastic material
backward mode AD
cost( ) (cost( ) 9cost( ))g Wα≈ +R F
(B) Virtual work principle
ˆ: ˆWδδ
=PF
ˆ ( ): ˆ
eg g
e
WJ
δ
δ=
pR
p
(A) Solution is a stationary point of the hyperelastic potential
backward mode AD
cost( ) cost( )g Wα≈R
1.5 5α< <optimal ADB form
ˆ: ˆg g
e
Jδδ
= ⋅F
R Pp

Pavia, 2011 39
Algorithm for primal analysis of hyperelastic problems
(0)0; ni = =p p
( ) ( ) ( ) ( ) ( )( )
( )( ) ( ) ( ) ( ) ( )
( )
; ;
; ;
i i i i ig e g g g ei
g eeigi i i i i
g e g g g eig ee
Ww J
w J
∂= = =
∂∂
= = =∂
∑
∑
R R R R RpR
K K K K Kp
AA
( 1)1
in
++ =p p
No( )i TOL<R
i:=i+1
Yes incn n<
No
Yes
00; initialn = =p p
( ) ( ) ( ) ( )
( 1) ( ) ( )
i i i i
i i i+
Δ = − → Δ
= + Δ
K p R p
p p p
Yes
Newton-Raphson scheme for nonlinear hyperelastic problemssubjected to quasi-static proportional loadwith constants load stepping Automation of the scheme
(0): 0; : ; :n ni λ λ λ= = = + Δp p
( ) ( ) ( ) ( ) ( )( )
( )( ) ( ) ( ) ( ) ( )
( )
ˆ: ; : ; :
ˆˆ
: ; : ; :ˆ
i i i i i refg g e g g ei
g eeigi i i i i
g e g g eig ee
WJ w
w
δλ
δδ
δ
= = = −
= = =
∑
∑
R R R R R Rp
RK K K K K
p
AA
( 1)1 1: ; :i
n nλ λ++ += =p p
No( )i TOL<R
i:=i+1
Yes
No
n:=n+1
Yes
0
0
: 0; :
: 0; : 1initial
inc
n
nλ λ= == Δ =p p
( ) ( ) ( ) ( )
( 1) ( ) ( ):
i i i i
i i i+
Δ = − → Δ
= + Δ
K p R p
p p p
Yes
incn n<
(0)0; ;n ni λ λ λ= = = + Δp p
( ) ( ) ( ) ( ) ( )( )
( )( ) ( ) ( ) ( ) ( )
( )
; ;
; ;
i i i i i refg g e g g ei
g eeigi i i i i
g e g g eig ee
WJ w
w
λ∂
= = = −∂
∂= = =
∂
∑
∑
R R R R R Rp
RK K K K K
p
AA
( 1)1 1;i
n nλ λ++ += =p p
No( )i TOL<R
i:=i+1
Yes incn n<
No
Yes
0
0
0;
0; 1initial
inc
n
nλ λ= == Δ =p p
( ) ( ) ( ) ( )
( 1) ( ) ( )
i i i i
i i i+
Δ = − → Δ
= + Δ
K p R p
p p p
Yes
n:=n+1

Pavia, 2011 40
Model: elasto‐plastic theory that assumes elastic isotropic responsedefined by the additive decomposition of strain tensor
• vector of element d.o.f. • vector of unknown state variables g ‐ Gauss point• elastic strain• elastic free energy function per unit volume • yield function• evolution equations for
• Q ‐ set of additional set of algebraic equations per Gauss point that has to be solved for unknown hg
• Solution: local Newton‐Raphson iterations at Gauss point– consequence: dependency of state variables on displacement
Small strain plasticity ‐ definitions
,pg mε λ=hep
pe = −ε ε ε
W=W( )eε
3 1 1( ) tr( ) : tr( )
2 3 3 yf σ σ σ σ σ σ⎛ ⎞ ⎛ ⎞⎟ ⎟⎜ ⎜= − − −⎟ ⎟⎜ ⎜⎟ ⎟⎜ ⎜⎟ ⎟⎝ ⎠ ⎝ ⎠
0p p pn
pmf
ε
ε λ
− −Δ∂
Δ
=
=∂
ε ε
σ
0p p p
n
f
ε⎧ ⎫⎪ ⎪⎪ ⎪ =⎨ ⎬− −
⎪ ⎪⎪ ⎪
Δ
⎩ ⎭Q =
ε ε
pε
( )g eh p

Pavia, 2011 41
ADB form of small strain plasticity
Virtual work:
( ) 0trialf ≥σ
ˆ ( , ): ˆ
g nWδ
δ=
hεσ
ε( ) 0trialf <σ
,
0
ˆ ( , , ): ˆ
g
e
g g n
D
D
Wδ
δ=
=h
p
h hεσ
ε
0
ˆ: ˆ
g
e
g g DeD
WJ
δδ =
=h
p
Rp
( ) 1ˆ
ˆ
ˆ: ˆ
g gg
e e
gg
DeD
δ
δ
δ
δ −=−
=h Q
Ap p
RK
p
ˆ: ˆg
e
δδ
= ⋅Rpεσ
efficient form of consistent linearization(dependency due to the local NR loop)
suppress implicit dependencydue to the local NR loop
ADB form of plasticity problems
0 0
ˆ ˆ ˆˆ ˆ ˆ
g g
e e
D De eD D
W Wδ δ δδ δ δ
= =
⋅ =h hp p
εε p p
σ
KORELC, Jože. Automation of primal and sensitivity analysis of transient coupled problems. Comput. mech., 2009, 44:631‐649.
elastic
plastic

Pavia, 2011 42
Newton iterative procedure
( )
,
,(0)
,
( ) ( ),( )
( )
1( ) ( ) ( ) ( ),
( 1) ( ) ( )
( )1
: ( )
: ( , )
0 :
:
repeat
( , , ):
0 : ( , , )
:
until
(*define global AD exceptio
etrial
g ntrial
g g n
g g n
j jg g g nj
g jg
trial j j j jg g g g g nj j jg g g
jg n
f f
f
f
TOL
ε ε
ε
δ ε
δ
ε−
+
+
=
=
≤ =
=
=
> Δ = −
= + Δ
Δ <
p
h
h h
h h
Q h hA
h
h A Q h h
h h h
h
( ) 1 ,( , , )
,
n of type D for *)
:
(*define local AD exception of type B for *)
( , , ): |
:
g g g g ng
g
e
g
Dg gD
g
g g ng g D
e D
gTg
e
WJ
δ ε
ε δε
δ ε
δ
δ
δ
−=−
=
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪ =⎪⎪⎪⎪⎩
=
=
h Q h hA
h0
p
h
h h
hh h
Rp
RK
p
ADB form of tangent and residual
(0): 0; : ni = =p p
i:=i+1
(0),:g g n=h h
( ) 1( 1) ( ) ( ) ( )j j j jg g g g
−+ = −h h A Q
( ) 1( 1) ( ) ( ) ( )i i i i−+ = −p p K R
Yes
g:=g+1
1
, 1
:
:
1,2,...,
n
g n g
gg N
+
+
==
=
p ph h
( ) ( )( )
( ) ( )e
i igi e e
e i ig Ge g e
D
D∈
∂ ∂= +
∂ ∂∑
hR RK
p h p
Yes
No
next time step
n:=n+1
j:=j+1
No
e:=e+1
0: 0; : initialn = =p p
( )jg TOL<Q
( )i TOL<R
Nested Newton iterative procedure

Pavia, 2011 43
Comparison of code size and numerical efficiency
• The presented comparison is based on an example where a rectangular bar isstretched, thus all the Gauss points are either in elastic or in plastic state.
2D
3D

Pavia, 2011 44
Key features:• hybrid symbolic‐numeric
FEM environment• AceFEM combines use of
Mathematica’s features with external handling of intensive computations by compiled modules
• support for web‐based FEM
• fast sparse solvers, exact sensitivity analysis, etc.
AceFEMThe Mathematica Finite Element Environment
AceFEM
‐ input data processing‐mesh generation‐ solution strategies‐ command language‐ graphic post‐processing
General procedures
Mathematica
element 1.dll file
element 2.dll file
element ....dll file
‐ data base‐ evaluation of element quantities‐ assembly of element contributions‐ various linear solvers
CDriver
C language
dynamic link
MathLink
AceShare‐ FEM file sharing system‐ download .dll or .m files
element 2.m file
element ....m file
MDriver
element 1.m file
‐Mathematica language‐ data base in MMA‐ evaluation of element quantities‐ assembly of element contributions‐MMA linear algebra

Pavia, 2011 45
AceFEM and AceGEN
Numerical FEM environment
AceFEMCDriver MDriver
ELFEN
FEAP
Matlab
ABAQUS
Numerical user subroutinesC/C++/C# Mathematica FORTRAN Matlab
Symbolic FEMEnvironment interface
interface codeinitializationnumerical integration rules
AceGensymbolic inputproblem formulationderivation of formulascode generation

Pavia, 2011 46
Data structures
AceFEM data structures:
1. environment data defines a general information common to all nodes and elements idata$$, rdata$$
2. nodal data structure contains all the data that is associated with the node nd$$
3. node specification data structure contains information common for all nodes of particular type ns$$
4. element data structure contains all the data that is associated with the specific element ed$$
5. element specification data structure contains information common for all elements of particular type es$$

Pavia, 2011 47
Advanced examplesDebugging, verification, validation, ..
Semi‐analytical solution
Optimization
Coupled problems

Pavia, 2011 48
Verification & Validation of Numerical Codes
• Verification of Numerical Code– Is code correct? – benchmark tests (patch test, element eigenvalues tests, invariance tests)– code verification are ongoing activities of accumulating evidence that the
code is correct
• Validation– Are the righ equations solved? – validation with more accurate physical models– validation with experiments
• Verification of Calculation– Are the equations solved correctly?– grid convergence studies relative to an unknown solution– error estimation

Pavia, 2011 49
Formulationsconstitutive modelselement formulationresponse functional
Symbolic systemgeneration ofnumerical codesmulti‐languagemulti‐environment
Verification of calculation
• element code in C language• CDriver environment• convergence studies• small test cases
Validation ‐Material identification
• element code in C language• CDriver environment• uniaxial simulations• curve fitting
Verification of code• element code in symbolic• language• MDriver environment• basic tests
Industrial simulations
• element code in FORTRAN• ELFEN environment• large scale simulations
Advanced verifivation and validation procedure

Pavia, 2011 50
Generic one element test
Generic one element testto determine convergence characteristics of the element for the standard Newton‐Raphson iterative schemeto apprise behavior of the element in constrained conditions as material incompressibility and extremely distorted or elongated element shapesto verify objectivity with respect to the superimposed rigid body motion on a deformed state of the elementto verify objectivity with respect to the translation and rotation of the reference coordinate systemanalytical sensitivity analysis is independently verified by comparison with the finite difference methodto verify the correctness of the automatically generated code when ported on various machines and for various finite element environments

Pavia, 2011 51
Limit load optimisation of cantilever beam
• Task: find the shape of cantilever beam that has:– minimal volume– given ultimate load– ideal elasto‐plastic material– 2D quadrilateral element
ultimate loaduq
x( )h x
b
A
Av
λ
uλ
vL

Pavia, 2011 52
Formulation of the problem
• Three finite elemnts are needed to describe the problem:– 2D elasto plastic element– surface load element– prescribed displacement constrain element
uu u u
u
λ
λ λλ λλ
⎡ ⎤ ⎧ ⎫ ⎧ ⎫Δ −⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥ ⋅ =⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎪ ⎪ ⎪ ⎪Δ −⎢ ⎥ ⎪ ⎪ ⎪ ⎪⎣ ⎦ ⎩ ⎭ ⎩ ⎭
K K RK K R
u
el.-plast.
el.-plast.
,
displacements
load factor
elasto-plastic formulation equations
( ( ). )
: load element equationsˆ
: prescri
load
load
e
e
e e
e
u
u u u
u
ue
DD
A p
d
v v
λ
λ
λ
λ
δ λ
δ
γ
Ω
=
=
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭= +
Ω
= −
= −
∫
0p
p
RR
R
R R R
R
Rp
R
T
uu
T u
bed displacement constrain element equations
displacementin node A
prescdribed displacement in node A
path following parameter
A
p
v
v
γ

Pavia, 2011 53
Formulation of the problem
• Sensitivity problem ‐ load element is path‐independent
• Objective function2
0 0 1 2 3 penalty constrain ( ) 0min ; ( ) olumeu h xk
w w wλ λ >Φ Φ = − + + Φ∑V
1 2 3
prescribed limit load factor
calculated limit load factor
w , , weights
u
w w
λλ
( ( ), )
... shape sensitivity
.... design velocity field - problem dependent
( ): ... elementcontributionˆ
ee
DDX
D
DD
D D DD D D
DD
φ
φ φ
φ
φ φ
φδ
δφ =
=
=
= − =
= −X
R p 0p
K R
R R XR
XX
RR

Pavia, 2011 54 54
Design velocity field
δφφ
φDDφX
X
.... design velocity field - problem dependentDDφX
direct differentiation of symbolically parameterized mesh based on hybrid symbolic-numeric AceFEM environment

Pavia, 2011 55
gradient based optimization(FindMinimum)
initial shape
optimal shape
Large scale engineering optimisation


















