StateandInputconstraint satisfactionforNonlinearSystemsmate.tue.nl/mate/pdfs/12272.pdfEvery physical...
27
State and Input constraint satisfaction for Nonlinear Systems M. Nabuurs D&C 2010.28 Traineeship report Coach(es): Prof. M. Guay Supervisor: Prof. Dr. H. Nijmeijer Eindhoven University of Technology Department of Mechanical Engineering Dynamics & Control Eindhoven, October 07, 2010
Transcript of StateandInputconstraint satisfactionforNonlinearSystemsmate.tue.nl/mate/pdfs/12272.pdfEvery physical...

State and Input constraint
satisfaction for Nonlinear Systems
M. Nabuurs
D&C 2010.28
Traineeship report
Coach(es): Prof. M. Guay
Supervisor: Prof. Dr. H. Nijmeijer
Eindhoven University of TechnologyDepartment of Mechanical EngineeringDynamics & Control
Eindhoven, October 07, 2010

Abstract
Nonlinear systems with both state and input constraints are difficult to control. The complexity ofsuch system is the problem of simultaneous satisfying the nominal control object and each of theindividual constraints. In this report, a method is proposed to design state-feedback control laws thatguarantee state-constraint satisfaction while the control input remains bounded. The main idea is touse a recursive procedure to construct a constraint feasible set that is positive invariant with boundedcontrol. Constraint satisfaction is then achieved by modifying the control input on the boundaries suchthat the solution of the system remains inside the feasible set for all time. The proposed method willbe illustrated on two simple design examples at the end of this report.

Contents
1 Introduction 4
2 The constraint feasible set 52.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 State-constraint admissible set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3 Admissible set reduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 Controller Synthesis 113.1 The positive invariant feasible set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.2 Final theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4 Mathematical Example 13
5 Ball and Beam example 175.1 Matlab simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205.2 Experimental results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
6 Conclusions and Recommendations 226.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226.2 Recommendations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2


Chapter 1
Introduction
Every physical control system must deal with some limits or constraints in the operation region. Suchlimits can arise from physical constraints or from safety constraints. It is often desired that eachconstraint is satisfied at all time in order to keep the system inside a save operation region. A goodexample of this can be found in a nuclear power plant. For example, the temperature of the reactorcore has an upper constraint to prevent core meltdown. Violating this constraint cause an extremelyunsafe situation that needs to be prevented at all cost. Therefore, it is necessary that the plant controllerensures (beside the nominal control object) that the temperature constraint is satisfied at all time.
Another problem of physical systems is that the control input is often bounded. For example,the flow rate of the coolant in a nuclear power plant is bounded due to the limit cross section of thetransport pipes. This limits the capability of the controller to influence the core temperature, i.e. it hasa bounded cool down rate. This type of input-constraints will add some additional difficulties to thecontroller in a way that it must prevent the system from reaching a constraint in a region where novalid control input exists which prevent the system from violation the constraint.
Nonlinear systems that have both state and input constraints are extremely difficult to control. Thisis one of the reasons why structural control methods for this class of non-linear systems remain rare.Different control approaches have been proposed over the last few years [11] [4] [10] but NonlinearModel Predictive Control (NMPC) is by far the most popular method. It can deal in a natural waywith state and input-constraints. This makes it very successful in industry, especially in the context ofprocess control [6] [8] [3]. However, there are limitations on NMPC. The online optimization algorithmis more complex in comparison with linear Model Predictive Control (MPC) [7]. Computation timeis therefore increasing which makes NMPC unsuitable for fast sampling applications in combinationwith the need of large prediction horizons. Unlike linear MPC, it is for NMPC not sure that there iseven a solution for the optimization problem or that it can be found within a specified time window.This makes it far more difficult or even impossible to guarantee close-loop stability.
In this report we present another method for controlling systems with state and input constraintswithout the need of optimization techniques. The method is based on the Robust Constraint Satis-faction methods for systems with unbounded control as described in [1] and [2]. The main idea is toseparate the control objective and the constraint problem by designing two separated controllers. Thefirst one, a so-called nominal controller, is used to satisfy the nominal control object, that is to stabilizethe system or to follow a reference signal. The second controller, a so called invariant controller, is usedin the case where the system threatens to violate one or more constraints. Using a suitable switchinglaw, it is possible to apply the nominal controller inside a nominal save set, while switching to theinvariance controller on the boundaries to guarantee constraint satisfaction. This ’override’ approachhas the benefit that the final controller design is greatly simplified; i.e normal techniques can be usedto prove stability and constraint satisfaction.
The remaining of this report is organized as follows. In chapter 2, the relevant class of nonlinearsystems is defined together with a recursive method for finding a constraint feasible set for each indi-vidual state-constraint. It will be shown that each of these feasible sets can be render positive invariantwhile satisfying the constraints on the control input. In chapter 3, a method is proposed to combineeach feasible set to one singe ’total feasible set’. At the same time a switching synthesis is proposed torender the total set positive invariant with bounded control. The proposed design procedure of chapter3 is illustrated on both a theoretical example and a practical ball and beam system in chapters 4 and 5.Some main recommendation and an outlook for future work is given at the end.
4

Chapter 2
The constraint feasible set
In this chapter we will first give a definition of the nonlinear systems and the type of constraints forwhich the proposed state feedback method will be suitable. The remaining of the chapter will describea technique for finding constraint feasible sets, i.e. save sets with respect to a single state-constraint.The technique is treated in two sections, 2.2 and 2.3. In section 2.2 the limits on the control inputare ignored to find a state-constraint admissible set. This set will be further restricted in section 2.3 toform the constraint feasible set which can be render entirely positive invariant with bounded control.
2.1 Problem Formulation
Throughout this report, we consider the following class of nonlinear systems
x = f(x) + g(x)u (2.1)
where x ∈ Rn are the state variables and u ∈ U ⊂ R is the input variable witch takes values in the
interval U = u ∈ R|u ≤ u ≤ u. Here u and u are the lower and upper limit of the control input. Thevector fields f(x) and g(x) are assumed to be sufficiently smooth on a domain D ⊂ R
n. Furthermore,it is assumed that the state-constraints of the system can be written as a set of algebraic inequalities
yk = hk(x) ≤ 0 (2.2)
where hk(x) : Rn → R are sufficiently smooth functions. Each constraint function is assumed tohave a well defined relative degree ρk, that is Lghk = . . . = LgL
ρk−2f hk = 0 and LgLfh
ρk−1k 6= 0
for all x ∈ D, where Lghk(x) is the standard Lie derivative ∇hk(x)g(x). It is further supposed thatthe system satisfy the triangularity condition with respect to each of the fictive output functions (2.2),which is equivalent to the following assumption.
Assumption 2.1. For each output function hk(x), there exists a change of coordinates
Tk(x) =
φk,1(x)...
φk,n−ρ(x)hk(x)
...
Lρ−1f hk(x)
=
[ξkzk
]
(2.3)
where φk,1 to φk,n−ρ are chosen such that Tk(x) is diffeomorphism on the domain D ⊂ Rn, that
transforms the system into the normal form.
ξk = φk(ξk, zk) (2.4)
zk,j = zk,j+1, 1 ≤ j ≤ ρk − 1
zk,ρk= ak(ξk, zk) + bk(ξk, zk)u (2.5)
yk = zk,1
We assume the fictive outputs (2.2) to be weakly minimum phase such that the ξ-dynamics remainbounded. The second assumption is the existence of the b(ξ, z) term, this term has to exist to ensurea well defined relative degree. Furthermore it is require that the function b(ξ, z) doesn’t change signinside the interesting regions of the state space yet to be defined.
5

A normal feedback controller for system (2.1) can be designed using conventional design techniqueswhile ignoring the state-constraints. In the rest of this report this feedback controller is termed nom-inal controller and is denoted by unom(x). Well-known feedback control design techniques can befound in [5] or [9]. The only assumption on the nominal controller is that it stabilizes the system (2.1)with respect to an equilibrium point xd or to a time-varying trajectory xd(t).
2.2 State-constraint admissible set
In this section, a method is proposed to find the constraint admissible set by "reducing" the relativeorder of a single state-constraint in a backstepping like fashion. The method is first introduced fora single state-constraint but it is possible to repeat the method for each individual constraint hk(x).The main idea is to form a constraint admissible set for each state-constraint by restricting the set ofsafe initial condition with a recursive procedure. That is, restricting the save set which correspondto a single state-constraint, by constructing a new constraint in each "step". Such that satisfying thenew constraint guarantees satisfaction of the previous constraint. In the end, one obtains a set ofextra constraints on the initial condition and one final first-order constraint. Since the control inputoccurs explicitly in the derivative of this final first-order constraint, an unbounded control input canbe used to satisfy this final constraint and therefore also the previous constraints (including the initialstate-constraint).
Lemma 2.1. Consider the scalar differential equation
v(t) = −kv(t) + β(t)
with a positive constant k. Furthermore, assume that the function β(t) ≤ 0, ∀t > 0. Thenv(0) ≤ 0 ⇒ v(t) ≤ 0, ∀t > 0.
Proof. Since β(t) ≤ 0 for all t > 0 the differential inequality v(t) ≤ −k · v(t) holds. This inequalitycan be analyzed using the "Comparison Principle" [5]. Consider the following comparison equationω(t) = −k · ω(t). Under the condition v(0) ≤ ω(0) it follows from the comparison principle thatv(t) ≤ ω(t), ∀t > 0 where ω(t) is the solution of the comparison system. Since the comparisonsystem is a globally asymptotically stable first order system, ω(t) will converge to 0 from all initialconditions without overshoot. In particular, it follows that ω(t) ≤ 0, (∀t > 0) if ω(0) ≤ 0. Furthermore, one can conclude that for every v(0) ≤ 0 there exists a ω(0) such that v(0) ≤ ω(0) ≤ 0 holds.Since ω(0) ≤ 0 ⇒ ω(t) ≤ 0 and v(0) ≤ ω(0) ⇒ v(t) ≤ ω(t), (∀t > 0), one can conclude thatv(t) ≤ 0, (∀t > 0).
Theorem 2.1. Consider the nonlinear system (2.1) in combination with one of the state-constraints(2.2). Suppose further that assumption 2.1 holds. Then there exists a constraint admissible set Ssuch that x ∈ S ⇒ h(x) ≤ 0 holds and an unbounded control u ∈ R exists which makes the set Spositive invariant.
Proof. By assumption 2.1 there exists a change of coordinates that transform the system into thenormal form (2.3), where the h(x) constraint is now imposed on the z1 coordinate. To construct aconstraint admissible set for the unbounded control case, one starts with the first equation of thenormal form, z1 = z2, which can be rewritten as
z1 = −k1z1 + [z2 + k1z1]︸ ︷︷ ︸
v1
where k1 is a positive constant. A new variable v1 := z2 + k1z1 can be introduced such that
z1 = −k1z1 + v1 (2.6)
Lemma 2.1 shows that z1 ≤ 0, (∀t > 0) as long as v1 ≤ 0, (∀t > 0) (provided that z1(0) ≤ 0).So by satisfying the new v1 ≤ 0 constraint, satisfaction of the original state-constraint z1 ≤ 0 will
6

be guaranteed. By taking now v1 ≤ 0 as the new inequality constraint, and repeating the aboveprocess, one obtains the following expression
v1 = z3 + k1z2
= −k2v1 + [z3 + k1z2 + k2v1]︸ ︷︷ ︸
v2
Again a new variable v2 := z3 + k1z2 + k2v1 can be formed by taking everything on the right handside except for the −k2v1 term. Lemma 2.1 proves again that v1 ≤ 0, (∀t > 0) holds as long asv2 ≤ 0, (∀t > 0) provided that z1(0) ≤ 0. So by satisfying the new v2 ≤ 0 constraint, v1 ≤ 0 willhold and therefore z1 ≤ 0, (∀t > 0). The next steps are to apply this procedure inductively to getρ constraints written as
v0 : = z1 (2.7)
vi : = vi−1 + kivi−1 i = (1, . . . , ρ− 1) (2.8)
taking their time derivatives, one obtains the following expressions
v0 = −k1v0 + v1 (2.9)
v1 = −k2v1 + v2
...
vρ−1 = c(z) + b(z)u (2.10)
By the input-output linearizability of the nominal system, it follows that b(z) 6= 0. Therefore thecontrol input u can be used to make vρ−1 ≤ 0. More precisely, any control law that guarantees
c(z) + b(z)u ≤ 0 (2.11)
guarantees vi−1 ≤ 0 and therefore state-constraint satisfaction. It is easy to see that the (un-bounded) control law
u = uinv := −1
b(z)c(z) (2.12)
satisfied this inequality for all x ∈ Rn. If we define now the constraint admissible set as
S = x ∈ Rn|vi(x) ≤ 0, i = (0, . . . , ρ− 1) (2.13)
Then it is easy to see, that set S is acting positive invariant if the system switches from the nominalcontroller to the invariant controller at the border of S, i.e. when x(t) ∈ δS.
At this point, the results can be shortly summarized as follows. Starting with the given state-constrainthk(x) ≤ 0, ρ new constraints v0, . . . , vρ−1 are designed recursively. Lemma 2.1 proves that satisfactionof each constraint vi ≤ 0 guarantees satisfaction of the previous constraint vi−1 ≤ 0. Therefore, if theinitial state is such that x(0) ∈ S, it is sufficient to satisfy the last constraint vρ−1 ≤ 0 in order to satisfythe original state-constraint. For systems with a unbounded control input, satisfying the last constraintis always possible by switching to the invariant controller at δS. Because of the special importance ofthe last constraint the function
b0(x) := vρ−1(x) (2.14)
is referred to as the primary barrier certificate function for the constraint admissible set S.
7

2.3 Admissible set reduction
The primary barrier inequality function b0(x(t), u) ≤ 0, defined in the previous section, can always besatisfied if the control input u of the system is unbounded. However in section 2.1, it was stated thatthe control input is bounded and has to be inside the set U. Therefore, the inequality b0(x(t), u) ≤ 0can only be satisfied in particular regions of the ’barrier surface’ δS. That is, only at the points whereboth inequalities are fulfilled
c(x) + b(x) · uinv(x) ≤ 0
u ≤ uinv(x) ≤ u(2.15)
Regions of the set δS, where no invariant control law exists that satisfies both inequalities, are referredto as non-invariant regions. The solutions x(t) of the system must avoid these non-invariant regionsin order to guarantee state-constraint satisfaction. In the rest of this section, a method will be proposedthat excludes these non-invariant regions of the constraint admissible set. The main idea is to use a setof additional barrier functions that restricts the set S in such a way that satisfying the additional barrierfunctions will ensure that the solutions x(t) never reaches a non-invariant region. In the end, one isleft with a new set Ω ⊂ S that has no invariant regions and can be entirely made positive invariant withbounded control.
We start with redefining the invariant conditions of (2.15). In section 2.1, the assumption was madethat the b(x) term is either positive or negative inside the set S. This makes it possible to simplify(2.15) and restate it as
c(x) + b(x) · v ≤ 0 (2.16)
with the parameter v defined as
v :=
u, if b(x) > 0, (∀x ∈ S)
u, if b(x) < 0, (∀x ∈ S)(2.17)
The first step in finding the set of additional barrier function is to search for a function w1(x) : Rn →
R such that the barrier inequality w1(x) ≤ 0 excludes the non-invariant region of the set δS :=x ∈ R
n|b0(x) = 0. That is, (2.16)must hold for all the points inside the set x ∈ Rn|b0(x) = 0, w1(x) ≤ 0
Figure 2.1: Two dimensional representation of the set S, δS and the additional w1 barrier
One possible solution for the additional barrier function is to either take w1(x) = uinv(x) − u orw1(x) = u − uinv(x) (depending on the sign of b(x)). This will ensure that (2.16) holds for all thepoints where w1(x) ≤ 0 and therefore also in the set x ∈ R
n|b0(x) = 0, w1(x) ≤ 0. This solution isrepresented by the dashed line in figure 2.1. However, this kind of solutions is restricting the admis-sible set more then necessary. The next lemma will therefore propose a better method for finding thefirst additional barrier function.
8

Lemma 2.2. Let b0(x) be a primary barrier certificate function and let the unbounded invariantcontrol law (2.12) be such that b0(x)
∣∣u=uinv
≤ 0, (∀x ∈ S). Further, define the additional barrier
certificate function w1(x) as
w1(x) = Lfb0(x) + Lgb0(x) · v + α(b0(x)) with α(b0(x)) ∈ K (2.18)
Where the function α belongs to the class-K comparison functions [5], such that α is a continuousstrictly increasing function and zero at zero, i.e α(0) = 0. Satisfying the additional inequalityw1(x) ≤ 0, (∀t ≥ 0) will then guarantee that the primary inequality b0(x) ≤ 0 can be satisfied withan invariant control law that is bounded, i.e. uinv(x) ∈ U (∀t > 0).
Proof. The inequality b0(x) ≤ 0 can be satisfied with bounded control if (2.16) holds on each pointof the set x ∈ R
n|b0(x) = 0, w1(x) ≤ 0. In this set, the α(b0(x)) term will be zero since α(0) = 0.So (2.18) can be reduced to
w1(x) = Lf b0(x)︸ ︷︷ ︸
c(x)
+Lgb0(x)︸ ︷︷ ︸
b(x)
·v
Because c(x) := Lf b0 and b(x) := Lgb0, it is easy to see that (2.16) holds at each point wherew1(x) ≤ 0, meaning that satisfying the w1(x) ≤ 0 inequality will ensure that the b0(x) ≤ 0inequality can be satisfied with bounded control. Notice further, that the α(b0(x)) term will relaxcondition (2.16) inside the set S, that is inside the region where b0(x) ≤ 0 as illustrated in figure2.1.
Using Lemma 2.2, the first additional barrier function can be written as
w1 = Lf b0 + Lgb0 · v +K1b0 (2.19)
with the "static control input" v is as in (2.17) andK1b0 as the α(b0) function. Using a positive constantK1 ensures that K1b0 ∈ K. It also has the benefit that it simplifies the expression for the derivativesof w1, since K1 is not a function of x. Satisfaction of the inequality w1(x(t)) ≤ 0 (∀t ≥ 0) ensuresthat the invariant controller (2.12) does not exceed its control bound v while satisfying the primaryb0(x) ≤ 0 constraint. The next step is to determine if the w1 ≤ 0 inequality can be satisfied withbounded control. That is, if there exists an u ∈ U such that
w1(x) ≤ 0 ∀x ∈ x ∈ Rn|w1(x) = 0, b0(x) ≤ 0 (2.20)
If this is not the case, then we have to restrict the admissible set even more by a second additionalbarrier function w2, such that satisfying the second inequality w2 ≤ 0 will guarantee that the w1 ≤ 0barrier can be satisfied with bounded control.
Lemma 2.3. Let
wi(x) = Lfwi−1(x) + Lgwi−1(x) · v +Kiwi−1(x) with Ki > 0 (2.21)
be an additional barrier function with the static control v ∈ U as defined in (2.17). Let the initialcondition be such that wi−1(x(0)) ≤ 0 and assume that wi(x(t)) ≤ 0, (∀t ≥ 0). Then the inequalitywi−1(x(t)) ≤ 0 can be satisfied with the bounded static control law u = v for all t > 0.
Proof. The time derivative of wi−1(x) when the static control input is applied to the system isgiven by
wi−1(x)∣∣∣u=v
= Lfwi−1(x) + Lgwi−1(x) · v
It is possible to rewrite this equation and to define a new variable wi
wi−1(x)∣∣∣u=v
= −Kiwi−1(x) + [Lfwi−1(x) + Lgwi−1(x) · v +Kiwi−1(x)]︸ ︷︷ ︸
wi(x)
If wi(x) ≤ 0, then lemma 2.1 shows that wi−1(x(t)) ≤ 0 hold for all t > 0 and as long as thestatic controller is used. So if a switching control law is such that u = v when the solution x(t)approaches the barrier surface wi−1(x(t)) = 0, then the above lemma shows that the solutionalways moves away from this barrier such that the inequality wi−1(x(t)) ≤ 0 will never be violated.This completes the proof.
9

Lemma 2.3 gives a straightforward method for finding an additional w2 barrier function. If the systemis such that the inequality w2 ≤ 0 cannot be satisfied with bounded control then it is necessary to useLemma 2.3 again up to the point where the wp ≤ 0 inequality can be satisfied with bounded control.The complete set of required additional barrier function is then defined as
w1 = Lfb0 + Lgb0 · v +K1b0 ⇐ Lemma 2.2
wi = wi−1
∣∣u=v
+Kiwi−1, i = (2, · · · , p) ⇐ Lemma 2.3
It is now possible to state the main theorem of this chapter.
Theorem 2.2. Let Wi = x ∈ Rn|wi(x) > 0 be the set of all the points where the additional
inequality wi(x) ≤ 0 fails and let p be such that
(
S \
p⋂
i=1
Wi
)
∩Wp+1 = ∅ (2.22)
Then
Ω = S \
p⋂
i=1
Wi (2.23)
is a feasible set which can be made entirely positivly invariant with bounded control, i.e. u ≤ u(t) ≤u (∀t ≥ 0).
Proof. Lemma 2.2 and 2.3 proves that the feasible set Ω is positive invariant as long as the inequalitywp(x) ≤ 0 holds at all points inside the set M = x ∈ Ω|wp(x) = 0. From the definition of p, itis easy to see that M ∩ Wp+1 = ∅. That is wp+1(x) ≤ 0 and therefore wp(x)
∣∣u=v
≤ 0 inside theset M . So, switching to the static control law u = v when the solution x(t) reach the set M willguarantee that wp(x) ≤ 0.
Notice that the number of needed additional barrier functions is hard to determine. If the last derivedadditional barrier function wi fulfills (2.22) of Theorem 2.2, then the wi ≤ 0 inequality can be fulfilledwith bounded control for all time, meaning that searching for more additional barrier functions isunnecessary. However, condition (2.22) is not easy to verify, i.e. no analytical solution has been foundto verify this condition. Therefore, numerical and graphical methods will be used in the rest of thereport to verify this ’stopping’ condition. Notice further that the number of needed additional barrierfunctions must be finite. The set S will significantly ’shrink’ with each additional barrier function,meaning that in theory the set S can shrink to an empty set with a finite number of additional barrierfunction.
Notice further that it is possible to replace the static control signal v in Lemma 2.2 and 2.3 by anyother bounded control law u(x) ∈ U. However, taking the same static control signal for both Lemmashas the benefit that the switching control law is stable in the region where two (or even more) barrierfunction are intersecting. For example at the point P := x ∈ R
n|w1(x) = b0(x) = 0 (see also figure2.1), the control law uinv(x) that render the b0 barrier invariant has exactly the same value as the staticcontroller v that render the w1 barrier invariant. Thus the switching control ensures that both barrierfunctions are decreasing. This is explained in more detail in the next chapter (assumption 3.1).
10

Chapter 3
Controller Synthesis
In the remaining of this report, we consider the multiple state-constraint case as introduced in section2.1. It is possible to repeat the admissible set reduction method of the previous chapter for eachindividual state-constraint to get multiple feasible sets. In this chapter, these multiple feasible sets arecombined to one final feasible set. Furthermore, a switching controller is introduced to render the finalset positive invariant, which ensures that any solution starting in the final set stays there in positivetime while simultaneously satisfying all the state-constraints. The additional index number k is usedto make the distinction between the different sets and there invariant controllers. That is, for eachstate-constraint hk(x) there exists an admissible set Sk and a feasible set Ωk, as defined in the previouschapter. The invariant controller uinvk
ensures satisfaction of the primary barrier function bk0 whilethe static controller vk prevents violation of the additional barrier functions wk1, . . . , wkpk
.
3.1 The positive invariant feasible set
We start this chapter with the definition of the final feasible set for the case of multiple state-constraintsas
Ω =m⋂
i=1
Ωki (3.1)
which is simply all the points that appear in each individual feasible set Ωk. Figure 3.1 represents this(in the case of two state-constraints) as the dark ’overlapping region’. Next, a complementary switchingcontrol law that combines the individual controllers is required in order to render the final feasible setpositive invariant. Different types can be used, but for simplicity the ’bang-bang type’ of control is used
ucom(x) =
uinv1, if b10 ≥ 0
v1, if max(wk1, . . . , wkpk) ≥ 0
...,...
uinvm, if bm0 ≥ 0
vm, if max(wm1, . . . , wmpm) ≥ 0
unom, else
(3.2)
However, a crucial problem in systems with any sort of switching control is stability. It is not certainthat the proposed switching controller (3.2) can render the final feasible set positive invariant withoutfurther assumptions. Notice that, although the set Ω is built up from individual positive invariant fea-sible sets Ωk, the final feasible set Ω does not have to be invariant. Stability in the region where two (ormore) borders δΩk of the individual feasible sets are intersecting remains uncertain. At these criticalintersection points it is unsure if a bounded control input exists which stabilizes/satisfies both activeconstraints at the same time. For stability prove we will therefore introduce the following assumption.
Assumption 3.1. Assume that for all the critical points p(x), i.e where δΩi intersect δΩj, thefollowing holds
Lfwi(x) + Lgwi(x) · vj(x) ≤ 0 ∨ Lfwj(x) + Lgwj(x) · vi(x) ≤ 0 (3.3)
With wi (wj) as the intersecting constraint function of the set Ωi (Ωj), and vi (vw) as the controllaw to satisfy the wi (wj) constraint.
11

Figure 3.1: Two dimensional representation of the final set Ω for a systems with two state-constraints
3.2 Final theorem
It is now possible to state the final theorem of this report.
Theorem 3.1. Let Ω be a final feasible set and suppose that assumption 3.1 holds for each criticalintersection point inside δΩ. Then the switching control law (3.2) will guarantee that the feasibleset Ω is positive invariant.
Proof. The border δΩ is made up of multiple sections of δΩk k = (1, . . . ,m). Each of these sectionsis build up from one primary barrier function equality bk0 = 0 and a maximum of pk additionalbarrier functions equalities wk,1...p = 0. Lemma 2.2 and Lemma 2.3 prove that
∇bk0(x) · (f(x) + g(x) · uinvk(x)) ≤0 if bk0(x) = 0 (3.4)
∇wki(x) · (f(x) + g(x) · vk(x)) ≤0 if wki(x) = 0 (3.5)
which shows that the complementary switching controller (3.2) ensures that the vector field pointsinwards at the barrier equalities that form the border of the set δΩk. It was also mentionedbefore that the value of the two controllers uinvk
(x) and vk(x) are the same at the intersection ofbk0(x) = 0 and wk,1...p(x) = 0. This automatically ensures that
Lfbk0(x) + Lgbk0(x) · vk(x) ≤ 0 ∨ Lfwki(x) + Lgwki(x) · uinvk(x) ≤ 0 (3.6)
and thus forms a stable intersection point. This proves that all the individual sections have aninwards pointing vector field with respect to the section itself. The point where the individualsections are linked together (to form δΩ) are know as the critical points. These points are repre-sented by the round dots in figure 3.1, i.e. where δΩ1 intersect δΩ2. Assumption 3.1 ensures thatthe complementary switching controller has at least one solution that satisfy both active barrierfunctions at such critical point. Meaning that the control law (3.2) ensures that the vector fieldpoints inwards with respect to the two active barrier functions. This proves that the complemen-tary switching controller guarantees an inwards pointing vector field on δΩ, which ensures positiveinvariance of the set Ω.
It is now easy to see that the complementary switching controller (3.2) also guarantees state-constraintsatisfaction. In section 2.2 it was stated that a state-constraint hk(x) is satisfied if the solution x(t)does not leave the set Sk. The final feasible set is a subset of Sk, that is Ω ⊂ Ωk ⊂ Sk. Theorem 3.1prove that the set Ω is positive invariant when u(x) = ucom(x) is used as control feedback. Hence,for any initial condition x(0) ∈ Ω, the solution will remain inside the set such that violation of thestate-constraints is impossible.
12

Chapter 4
Mathematical Example
In this chapter the proposed method is demonstrated on the following mathematical example
x1 = x1 − 2x2 + x21
x2 = x1 + x2 + x21x
22 + u
(4.1)
y = h(x) = x1 − a ≤ 0 (4.2)
The proposed two-dimensional system (4.1) has one bound on its control input such that u ∈ U =u ∈ R|u ≤ u with a positive constant u so the control input has to fulfill u ≤ u for all time. Furtherit is assumed that the state x1 is constrained such that the inequality x1 ≤ a must hold. This singlestate-constraint can be written as a virtual output function h(x) as shown in (4.2). It is easy to see thath(x) has a well defined relative degree of 2, i.e. ρ = 2
A nominal tracking controller is designed for the system such that x1 follows the reference signalx1d = 1.5sin(t)
unom = −0.5(v − (2x1 + 1)(x1 − 2x2 + x21)
+ 2(x1 + x2 + x21x
22)) (4.3)
with v = −2((x1 − 2x2 + x21)− x1d)− 5(x1 − x1d)
It is assumed that the nominal controller is such that unom ∈ U for all t > 0. In this example, this isrealized by adding a saturation function on top of (4.3), i.e. unom = u if the solution of (4.3) exceedsthe upper control bound u. In the rest of this example, the upper control bound is defined as u := 2and the positive constant a is defined as a := 1. As a result, the state-constraint can be written asx1 ≤ 1. The tracking controller steers the state x1 across this state-constraint in an attempt to fol-lowing the tracking signal, as can be seen in Figure 4.1. In practice, it is very unlikely that one wouldrequire a system to track a signal that violates the process constraints. However, under disturbancesor with uncertainties inside the system, it is possible that the nominal controller drives the systeminto an unsafe region of the state space. These situations are simulated in this example by validatingthe state-constraints on purpose with the given nominal controller. Or, in other words, the nominalcontroller can not "guarantee" constraint satisfaction and an invariant controller is needed to ensurex1 ≤ 1 ∀t > 0.
The first step in designing this invariant controller is to find the constraint admissible set S as pre-sented in section 2.2. One starts by transforming the system into its normal form, i.e. v0 := z1 = x1−aand z2 = x1 − 2x2 + x2
1. In the new coordinates the system can be written as
z1 = z2
z2 = −z1(z1 − 2z2 + 3)− .5z21(z1 + z21 − z2)2 + 2z2 − 2u
0 2 4 6 8 10 12 14 16 18 20−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
t [s]
x 1
No invariant controlUnbounded controlBounded control
Upper bound of x
1
Figure 4.1: State x1 against time
13

0 2 4 6 8 10 12 14 16 18 20−4
−3
−2
−1
0
1
2
3
4
t [s]
Inpu
t u
Unbounded controlBounded control
Upper bound of u
Figure 4.2: Control input
The backstepping-like procedure can now be applied to find the second constraint. One starts with thez1 subsystem and rewrites it as
z1 = −k1z1 + [z2 + k1z1] = −k1z1 + v1
The second constraint is now given by v1 := z2 + k1z1 ≤ 0. This is already the vρ−1 constraint, so itprovides a primary barrier certificate function for the constrained system with a derivative dependingdirectly on the input u, i.e.
v1 = z2 + k1z2 (4.4)
= −z1(z1 − 2z2 + 3)− 0.5z21(z1 + z21 − z2)2
+ z2(2 + k1)− 2u
= c(z) + b(z)u
Therefore the unbounded control law
uinv ≥− .5z1(z1 − 2z2 + 3)− 0.25z21(z1 + z21 − z2)2
+ z2(1 + .5k1)(4.5)
satisfies the inequality v1 ≤ 0 and renders the constraint admissible set S positively invariant. How-ever, uinv as defined in (4.5), is unbounded and uinv ∈ U can not be guaranteed for all time. Figure 4.2shows that the control input u exceeds its upper bound when the invariant control law uinv becomesactive, i.e the dashed line on t = (2π, 4π, . . .). Although the invariant control law ensures constraintsatisfaction, it is not a realistic solution and some additional tuning of the set S is necessary to ensurethat uinv ∈ U for all time.
This tuning can be done following the approach proposed in section 2.3. The main idea is to find aset Ω ⊂ S by excluding non-invariant regions of the set S. From (2.17), it is clear that v = u, i.e. thestatic control input is equal to its upper bound. As described in Lemma 2.3, one can determine theadditional barrier certificate functions in a recursive way. The first two are written as
b0 =x1 − 2x2 + x2
1 + k1(x1 − a)
w1 =(1 + 2x1)(x1 − 2x2 + x2
1)− 2x1 − 2x2 − 2x2
2x2
1
+ k1(x1 − 2x2 + x2
1)− 2v +K1 · b0
w2 =(x1 − 2x2 + x2
1 + (.5 + x1)2− 1− 2x2
2x1 + k1(0.5 + x1))
· (x1 − 2x2 + x2
1) + (−4− 4x1 − 4x2x2
1 − 2k1)
· (x1 + x2 + x2
2x2
1) + (−4− 4x1 − 4x2x2
1 − 2k1)v
+K1 · b1 +K2 · w1
(4.6)
Note that the expressions for wi can have many terms especially for large p. However, one can deter-mine them in a straightforward way. The non-invariant sets Wi = x ∈ R
n|wi > 0, which followdirectly from the above equations, are shown graphically in figure 4.3. The natural question that arisesis how large the integer p must be. From figure 4.3, one can visually conclude that the following set ofequations holds.
[S] ∩B1 6= ∅
[S \B1] ∩B2 6= ∅ (4.7)
[S \ (B1 +B2)] ∩B3 = ∅
14

−4 −2 0 2
−2
0
2
x1
x 2
Set S
−4 −2 0 2
−2
0
2
x1
Set W1
−4 −2 0 2
−2
0
2
x1
Set W2
−4 −2 0 2
−2
0
2
x1
Set W3
Figure 4.3: Graphical interpretation of the constraint admissible set S and the non-invariant regionsWi
Recall from theorem 2.2 that the integer p must be such that Ω ∩Wp+1 = ∅. It is easy to see that onlythe third equation fulfills this definition of p. Since only the left hand side of the third equation givesan empty set. This means that there is no need to derive more additional barrier certificate functionsand one can define the integer p as p := 2. The final set Ω, that is invariant with bounded control, isgiven by (2.23), i.e
Ω = S \
p⋂
i=1
Wi = S \ (W1 +W2)
= x ∈ Rn|v0 < 0, v1 < 0, w1 < 0, w2 < 0
(4.8)
Notice that for this two dimensional example the integer p was rather easy to determine. Howeverfor higher dimensional system, one can not evaluate (2.23) in a visual way. For higher dimensionsor more complex systems, it is also possible to solve this equation numerically. For example, one candiscretize the state space and calculate for each point the values for wi(x). The set Ωp can then bedefined as all the point where the inequality wi(x) < 0 (i = 1...p) is satisfied with p such that the sizeof Ωp is equal to Ωp+1.
Once the nominal controller (4.3), the invariant controller (4.5) and the static controller v = u areknown, it is possible to combine the three different controllers to one single complementary switchingcontroller
ucom =(1− σ0)(1− σc)unom + σ0uinv + (1− σ0)σcu
with σ0 = (sign(b0) + 1)/2 σ1 = (sign(w1) + 1)/2(4.9)
The above complementary controller is able to satisfy the state-constraint with a bounded control actioni.e. ucom ≤ 0, (∀t > 0). This is also visible in figures 4.1 and 4.2.
15

The following three figures shows how the different controllers influence the system. The most leftfigure (figure 4.4.a) shows the trajectory of the system when only the nominal controller influences thesystem. It is clear that the system does not remain within the set S and validate the state-constraintx1 ≤ 1.
−4 −2 0 2−3
−2
−1
0
1
2
3
x1
x2
−4 −2 0 2−3
−2
−1
0
1
2
3
x1
x2−4 −2 0 2
−3
−2
−1
0
1
2
3
x1
x2
1W
2W
SSS
(a) (b) (c)
Figure 4.4: System trajectories in the x1 − x2 plane for; (a) Only the nominal controller, (b) Thenominal and the invariant controllers, (c) The complete complementary controller
In figure 4.4.b, the invariant controller (4.5) becomes active on the border of the set S. This ensuresthat the system stays inside the set S and that the state-constraint is satisfied. However, the systemtrajectory intersects the W1 set, such that the control signal exceeds its upper bound. This is alsorepresented by the dashed line in figure 4.2.
Boundedness of the invariant controller can be guaranteed by ensuring that the system does not reachpoints inside the sets W1 or W2. This is done in the last figure 4.4.c, where the complementarycontroller of (4.9) is used to control the system. Here the static controller ensures that the systemdoes not intersect the sets W1 and W2. As a result, the control signal never exceed its bounds whilesatisfying the state-constraint as can be seen by the solid line in figures 4.1 and 4.2.
16

Chapter 5
Ball and Beam example
In this chapter, the theory of this report is used to control the classic ball and beam system. Firstthe theory of chapters 2 and 3 will be used to derive a complementary controller that controls theball and beam system without violating any state or input constraints. Then, the performance ofthe complementary controller are examined in both a numerical simulation (section 5.1) and someexperimental tests on a real ball and beam system (section 5.2).
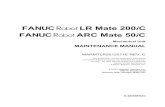
A schematic representation of the ball and beam system which is used in this chapter is given in figure5.1. It is suppose that the motor can be considered "stiff" in comparison with the rest of the system and
support
lever arm
DC motor
and gears
radius, r
beam angle, α
motor gear
angle, θ
beam length, L
ball position, x
+
-
motor
voltage, V
ball radius, R
ball mass, m
Figure 5.1: QUANSER Ball and Beam System
that the position of the ball or the angle of the beam does not influence the performance of the motor.This makes it possible to separate the system into two subsystems, i.e. one system to control the angleθ of the motor (with a normal PD controller) and a second system that controls the position of the ball.These two systems are interconnected as shown in the next figure.
Figure 5.2: Control Loop
The dynamics of the rolling ball can be defined as
x = −5
7· g · sin(α) (5.1)
where x is the position of the ball and α the angle of the beam. The beam angle is a function of themotor angle θ, i.e. sin(α) = G(θ). This relationship is nonlinear but can be approximated by
sin(α) =r
Lθ for r << L
From figure 5.3 it is visible that this approximation can work as long as −0.5 ≤ θ ≤ 0.5.
This makes it possible to write the linearized model of the ball and beam system (without the innerloop) as
x1 = x2
x2 = −B · a · g · θ(5.2)
17

where x1 is the position of the ball (x1 = 0 is the midpoint of the beam) and x2 is the velocity. Theconstants are such that B = 5/7, a = r/L and g = 9, 81. The motor angle θ will be the control inputof the system.
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1Nonlinear relation between θ and sin( α)
θ [rad]si
n(α)
[−]
Exact non−linear relationLinear approximation
Figure 5.3: Nonlinear relation between θ and sin(α)
The control goal is to let the ball follow a reference signal of x1d = 0.2 · sin(t) + 0.2, such that theball rolls from one end to the other end of the beam. A nominal tracking controller is derived that canfulfill this task without exceeding the input bounds, i.e
unom(x) = −(1/B · a · g) · vt(x)
with:
vt(x) = −a1 · (x2 − x1d(x))− a0 · (x1 − x1d(x))
a1 = 0.07631 a0 = 0.03643
x1d(x) = 0.2 · sin(t) + 0.2 x1d(x) = 0.2 · cos(t))
(5.3)
Both ends of the beam are taken as a state-constraint, i.e 0.05 ≤ x1 ≤ 0.35. Further, the input angleθ is constrained during the mechanical construction of the system to an upper and lower limit, i.e|θ| <≈ 1/2π. However, during the linearization of the model, we constrain the input to the region|θ| ≤ 0.5, i.e u = −0.5 and u = 0.5. The two state-constraints can now be written in the form
h1(x) = 0.05− x1 ≤ 0
h2(x) = x2 − 0.35 ≤ 0(5.4)
The first step in deriving the complementary controller is to find the feasible set Ω1 of the first state-constraint h1(x). It is easy to see that the relative degree of this state-constraint is 2 and well defined,i.e ρ1 = 2. So the normal form can be written as, z11 = 0.05 − x1 and z12 = −x1. From chapter 2, itfollows that the first boundary of the constraint admissible set is given by v10 = z11 and that the secondboundary can be calculated with the use of (2.8), that is v11 = −x2 + k11(0.05− x1). The derivative ofthis boundary depends directly on the control input θ, meaning that the constraint admissible set S1
can be written as
S1 = x ∈ R|v10(x) ≤ 0, v11(x) ≤ 0
However, this set is not positive invariant with bounded control so it is necessary to find a feasible setΩ1 ⊂ S1 such that the set Ω1 is completely invariant. As pointed out in chapter 2, this can be done byfinding additional barrier functions. The first one can be found using (2.19), that is
w11(x) = Lfv1 + Lgv1 · v1 +K11v1
= −k11 · x2 +B · a · g · v1
+K11 · (−x2 + k11 · (0.05− x1))
(5.5)
Here the static controller v1 is equal to the lower control bound since b(x) = B ∗ a ∗ g is positive for allx ∈ R. The next step is to see if the neww11 barrier can be satisfied with bounded control. Onemethodto solve this is to derive a second additional barrier function and to see if (Ω \W11) ∩W12 = ∅, withWij x ∈ R|wij(x) ≤ 0. In figure 5.4, we see that the set W12 does not restrict the feasible set Ω. Soin this case only one single additional barrier function is needed to restrict the constrained admissible
18

set. By theorem 2.2, the feasible set for the first state-constraint is thereby given as
Ω1 = x ∈ R|v10(x) ≤ 0, v11(x) ≤ 0, w11(x) ≤ 0
v10(x) = 0.05− x1
v11(x) = −x2 + k11(0.05− x1)
w11(x) = −k11 · x2 +B · a · g · u
+K11 · (−x2 + k11 · (0.05− x1))
(5.6)
with u = −0.5. The "k" parameters can be used to shape the form of the feasible set, however in therest of this chapter we let k11 = 2 and K11 = 1. Using the symmetry of the system with respect tothe state-constraints, the feasible set for the second state-constraint h2(x) can be calculated in a similarway
Ω2 = x ∈ R|v20(x) ≤ 0, v21(x) ≤ 0, w21(x) ≤ 0
v20(x) = x1 − 0.35
v21(x) = x2 + k21 · (x1 − 0.35)
w21(x) = k21 · x2 −B · a · g · u
+K21 · (x2 + k21 · (x1 − 0.35))
(5.7)
The next step is to combine the two feasible set to one single final feasible set Ω (as in (3.1) ) and todetermine a complementary switching controller which render the final feasible set positive invariant.From (3.2), it follows in a strait forward why that this complementary controller can be written as
θ = ucom(x) =
uinv1(x), if v11 ≥ 0
u, if w11 ≥ 0
uinv2(x), if v21 ≥ 0
u, if w21 ≥ 0
unom(x), else
(5.8)
where the two invariant controllers uinv1and uinv2
(needed to render the set S1 and S2 positive invari-ant) follows from (2.12), that is
uinv1(x) = (1/B · a · g) · (k11 · x2)
uinv2(x) = (1/B · a · g) · (k21 · x2)(5.9)
Implementing the complementary switching controller (5.8) into the control loop will ensure that thesystem is not violating any state or input constraints. Some simulation and experimental results ofthis are given in the remaining of this chapter. First, a numerical simulation of ball and beam systemis presented, followed by some measurement on a real ball and beam system.
19

5.1 Matlab simulation
The following figures are obtained using simulations done in Matlab. The ball and beam model (5.2)and the switching controller (5.8) are implemented for three different situation which corresponds tothe following three state space figures.
−0.2 0 0.2 0.4−0.4
−0.2
0
0.2
0.4
x1
x2
−0.2 0 0.2 0.4−0.4
−0.2
0
0.2
0.4
x1
x2
−0.2 0 0.2 0.4−0.4
−0.2
0
0.2
0.4
x1
x2
21wSS
w22
S
(b) (c)(a)
11w
12w
Figure 5.4: System trajectories of the ball and beam system in the x1 − x2 plane
The first figure represent the case when only the nominal controller (5.3) is used. Of course, withoutswitching to an invariant controller, the solution x(t) leaves the constraint admissible set S as in figure5.4.a. Therefore the state-constraint will be violated as can be seen by the narrow dashed line in figure5.5.
In figure 5.4.b, the system switch to the invariant controller as soon as it reach δS, this makes theconstraint admissible set S positive invariant. However, the solution intersect the W11 and W21 set,meaning the the invariant control signal exceed its boundary’s. This violation of the input bounds isalso visible in figure 5.5, where the dashed line exceed the −0.5 and the 0.5 bounds.
The final complementary controller (5.8) is used in figure 5.4.c. Now, the solution x(t) stays outsidethe set W11 and W21 such the control signal is bounded while satisfying all the state-constraints.
0 1 2 3 4 5 6 7 8 9 10−0.1
0
0.1
0.2
0.3
0.4
0.5
Pos
ition
x1 [m
]
Simulation results
No invariant controlUnbounded controlBounded control
0 1 2 3 4 5 6 7 8 9 10−1
−0.5
0
0.5
1
time [s]
Con
trol
Inpu
t u [r
ad]
Figure 5.5: System response and Control input vs time
20

5.2 Experimental results
In this section, the ball and beam system of figure 5.6 is used to examined the proposed complemen-tary switching controller in practice. It has the same dimensions, parameters and definitions as thesimulation model in the previous section. Also the control object and the input-constraints are thesame, i.e. to let the ball follow a sinusoidal reference signal such that it rolls from one end to the otherend of the beam while the control input remains between an upper and a lower bound.
Figure 5.6: Quanser SRV02 setup
By using (5.2) as the system model and (5.8) as the complementary switching controller it is possibleto measure the response of the system for the same three situations as in the previous section. First,only the nominal controller (5.3) and no invariant controller was implemented. The narrow dashedline in figure 5.7 shows the response of the system as function of time. Again, the nominal controlleris not able to satisfy the state-constraints represented by the two horizontal lines in figure 5.7.
The blue dashed line in figure 5.7 represent the case when the nominal and the invariant controllersare used (corresponding to the second case of the previous section represented by figures 5.4.b and 5.5).The controller attempts to keep the position x1 of the ball inside the constraints. However, it needstherefore an control input that exceed the input constraints such that state-constraints satisfaction isnot entirely possible.
The solid line in figure 5.7 represent the measurement results when the complete complementary con-troller was implemented, i.e. controller (5.8). The system is now able to satisfy all the state-constraintson the position of the ball while the control input stays between the control limits.
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
Pos
ition
x1 [m
]
Results Ball and Beam system
No invariant controlUnbounded controlBounded control
0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
1.5
time [s]
Con
trol
Inpu
t u [r
ad]
Figure 5.7: System response and Control input vs time
Notice that the control input of the system is not the same as in figure 5.5. This is mainly becausethe limitation on the angular velocity of the motor is not considered in the previous simulation. Thislimitation can also be implemented in the simulation model to get results that better fit the actualmeasurements. However, this makes the theoretical model unnecessary complex which is not usefulin understanding the method that was proposed in this report. The most important thing of thissection is the prove that the proposed method works in practice, that is to satisfy the state-constraintswhile the control input keeps bounded.
21

Chapter 6
Conclusions and Recommendations
6.1 Conclusions
A recursive design method to construct control laws for nonlinear systems with state and input con-straints was proposed. The proposed method allows one to consider constraints on single states aswell as on combinations of states and can handle multiple constraints. The complementary switchingcontrol law (proposed in chapter 3) will satisfy the nominal control objective whenever possible andswitch to one of the invariant controllers if any of the state-constraints threatens to be violated. Thismakes it possible to control the system as long as possible with the nominal controller and as less aspossible with the invariant controller. Satisfaction of all the state-constraints can be ensured with acontrol input that keeps bounded, i.e. between the upper and lower limit on the control input. Theapplicability of the proposed method was also illustrated on two design examples, where it shows thatit is working on both a theoretical problem and on a real ball and beam system without any problems.
6.2 Recommendations
Even if the current work focuses primarily on single input systems, a generalization to multi-inputsystems should be easily to establish at this point. An open problem that remains is determiningthe number of additional barrier functions. It is of interest to focus on a analytical solution to findthe number of needed additional barrier functions. Also an implementation of the method on a highlynonlinear systemwhit a high number of state variables can be of interest to demonstrate the usefulnessof the method.
22


Bibliography
[1] M. Burger and M. Guay. Robust Constraint Satisfaction for Continuous-Time Nonlinear Systemsin Strict Feedback Form. Automatic Control, IEEE Transactions on, (99).
[2] M. Burger and M. Guay. Robust constraint satisfaction for continuous-time nonlinear systems.Decision and Control, 2008. CDC 2008. 47th IEEE Conference on, pages 7–12, 2009.
[3] R. Findeisen, L. Imsland, F. Allgower, and B.A. Foss. State and output feedback nonlinear modelpredictive control: An overview. European Journal of Control, 9(2-3):190–206, 2003.
[4] A.H. Glattfelder and W. Schaufelberger. Control systems with input and output constraints. SpringerVerlag, 2003.
[5] H.K. Khalil. Nonlinear systems. Prentice Hall, 2002.
[6] B. Kouvaritakis and M. Cannon. Nonlinear predictive control: theory and practice. IEE controlengineering series. Institution of Electrical Engineers, 2001.
[7] J.M. Maciejowski. Predictive control: with constraints. Pearson Education. Prentice Hall, 2002.
[8] L. Magni, D.M. Raimondo, and F. Allgoewer. Nonlinear Model Predictive Control: Towards NewChallenging Applications. Lecture Notes in Control and Information Sciences. Springer, 2009.
[9] R. Marino and P. Tomei. Nonlinear control design: geometric, adaptive, and robust. Prentice-Hallinformation and system sciences series. Prentice Hall, 1995.
[10] M.C. Turner and I. Postlethwaite. Multivariable override control for systems with output and stateconstraints. International Journal of Robust and Nonlinear Control, 14.
[11] J. Wolff and M. Buss. Invariance control design for constrained nonlinear systems. Proceedings ofthe 16th IFAC World Congress, 2005.
24