robotics handouts-part1.pdf

of 25
-
Upload
carmela-franchesca -
Category
Documents
-
view
228 -
download
0
Transcript of robotics handouts-part1.pdf
-
8/10/2019 robotics handouts-part1.pdf
1/25
prepared and compiled byMa. Cristina P. Tungpalan
This Instructional Manual belongs to:Name: _________________________
Section: ________________________
Introduction to Robotics Technology
-
8/10/2019 robotics handouts-part1.pdf
2/25
1
I. Introduction
In the 21 st century, the educative process deals greatly on globalization, computerization, and now
transformation of information system to mobile technology, which fast changing every day. The scope of
the 21 st education is to cope with the rapidly changing world filled with fantastic new problems as well as
exciting new possibilities caused by infinite ideations, creations and inventions that transpired by millions
of people exchanging information and ideas globally. Definitely, we have no idea of what other
technologies will emerge on the next five years, or even what the world will look like 50 years ahead.
Emerging technologies and resulting globalization provides unlimited possibilities for exciting new
discoveries and developments such as new forms of energy, medical advances, restoration of
environment, and new gateways for communications. The possibilities are unlimited. And this is thechallenge to the educators of the 21 st century to make a difference and be part of new and unlimited
possibilities.
Robotics is one of the emerging technologies that would create new possibilities to help human
perform repetitive tasks; human partners in medical and surgical operations; and help people increase
their work outputs and help produce accurate quality products.
Why Robotics in TLE subject? Robotics teaches essential skills such as electronics, mechanics,
mathematics, critical thinking, problem solving, teamwork and most importantly programming . The core
area in TLE IV is computer programming, and with robotics, we can do programming for two special
purposes software development and developing the microcontroller functionalities with sensors and
actuators.
The Robotics is research-based, and focuses on the development of the 21st century skills set for
the students such as teamwork, problem solving, ideation, project management, and communications.
Likewise, it provides an engaging program to teach STEM (Science, Technology, Engineering and
Mathematics) concepts.
-
8/10/2019 robotics handouts-part1.pdf
3/25
-
8/10/2019 robotics handouts-part1.pdf
4/25
3
Table of Contents
A. Introduction to Robotics Technology1. Definition 2. Laws of Robotics 3. Three main branches of Robotics4. Robotics History 5. Robot Part Types
B. The Robot Parts1. The Microcontroller (Controller)2. The Sensors3. The Actuators4. Basic Electricity and Electronics
5. Solderless Breadboard
-
8/10/2019 robotics handouts-part1.pdf
5/25
4
A. Introduction to Robotics Technology
Robot
Many people will think about robots as machines with hands and feet. However, this kind of robots oftenappears in scientific movies, entertainment, exhibitions and toy stores. They are very different fromindustrial robots. Most of the industrial robots are simple apparatus, they usually have robotic arms.Robotic arms are used in performing simple up-and-down motion, to take and pick out components frommachines.
In 1979, the American Robots Association has defined robots as
"A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools or specialized devices through variable programmed motions for the performance of avariety of tasks."
Although many industrial machines do not possess human shapes, they satisfy the criteria and can be calledrobots. Word robot was coined by a Czech novelist Karel Capek in a 1920 play titled Rassums UniversalRobots (RUR). Robot in Czech is a word for worker or servant
Robots are being used widely in industries. It is estimated that a lot of industrial robots will be in service innear future. At present, scientists are designing robots with visions so that robots can accomplish morecomplicated tasks.
Robotics
Robotics is the branch of technology that deals with the design, construction, operation, andapplication of robots.
Laws of Robotics
Isaac Asimov, who is considered to be the Father of Robotics, proposed three "Laws of Robotics" in 1942,later adding the Zeroth Law:
Law 0: A robot may not injure humanity or through inaction, allow humanity to come to harm
Law 1: A robot may not injure a human being or through inaction, allow a human being to come to harm,unless this would violate a higher order law
Law 2: A robot must obey orders given to it by human beings, except where such orders would conflict witha higher order law
Law 3: A robot must protect its own existence as long as such protection does not conflict with a higherorder law
-
8/10/2019 robotics handouts-part1.pdf
6/25
5
Three main branches of Robotics
Robots can be divided into three main categories:
Industrial Robots - These robots are dedicated to performing repetitive manufacturing
tasks that are often unsafe or unpleasant for human workers. They are designed torepeat the same process over and over without change. Modern industrial robots caneasily be programmed to perform new applications.
Research / Service Robots - These robots are designed to assist in exploring andgathering data. They are often used in space applications, surgeries, and householdchores. They are designed to not only interact with the environment, but reactappropriately, thus coining the term "artificial intelligence."
Educational Robots - These robots are sometimes considered toys or kits and aredesigned to provide an educational experience. Educational robots are used incompetitions and for learning experience. They often have the ability to simulate learnedbehavior.
Robotics History
1890s: Nikola Tesla designs the first remote control vehicles. He is also known for his invention of theradio, induction motors, Tesla coils.
1892: In the United States, Seward Babbitt designs a motorized crane with gripper to remove ingotsfrom a furnace.
1921: The first reference to the word robot appears in a play opening in London, entitled Rossum'sUniversal Robots. The word robot comes from the Czech word, robota, which means drudgery or slave-like labor. Czech playwright Karel Capek first used this term when describing robots that helped peoplewith simple, repetitive tasks. Unfortunately, when the robots in the story were used in battle, they turnagainst their human owners and take over the world.
1938: Americans Willard Pollard and Harold Roselund design a programmable paint-sprayingmechanism for the DeVilbiss Company.
1940s: Grey Walters creates an early robot called Elsie the tortoise, or Machina speculatrix. 1941: Science fiction writer Isaac Asimov first uses the word "robotics" to describe the technology of
robots and predicts the rise of a powerful robot industry. 1942: Asimov writes a story about robots, Runaround, which contains the "Three laws of robotics".
Robot Part Types
Robots consist of three main components
1. A system to communicate between the mechanical device and sensory data ( controller )2. Sensors that provide feedback from environment ( sensors )3. A mechanical device that can interact with surroundings ( actuators and mechanisms )
-
8/10/2019 robotics handouts-part1.pdf
7/25
6
The Robot Parts
Controller
The controller is the processing interface between the robot and itsenvironment. It provides intelligence and feedback to the robot through thecompilation of the sensor measurements. It also acts as a storage device,retaining the sensory information and inputted programs
The computation engine is generally able to process many tasks at one timeand seamlessly changes calculations to account for sensory information. Thecontroller includes the hardware that interfaces with the outside world. Itstores the user interface, which is used to input various commands.
This regulating device initiates one or more functions of operation in the robotarm, such as starting, stopping, reversing, and changing speeds by issuing apreset list of commands
It was electricity in the beginning....The people were happy because they did not know that it was all around them and could beutilized. That was good. Then Faraday came and a stone has started to roll slowly...The first machines using a new sort of energy appeared soon. A long time has passed since then and just when the people finally gotused to them and stopped paying attention to what new generations of specialists were doing, someone came to an idea thatelectrons could be a very convenient toy being closed in a glass pipe. It was just a good idea at first, but there was no return.
Electronics was born and the stone kept on rolling down the hill faster and faster...
A new science - new specialists. Blue coats were replaced with white ones and people who knew something about electronicsappeared on the stage. While the rest of humanity were passively watching in disbelief what was going on, the plotters split in twogroups - software -oriented and hardware -oriented. Somewhat younger than their teachers, very enthusiastic a nd full of ideas,both of them kept on working but separate ways. While the first group was developing constantly and gradually, the hardware-oriented people, driven by success, threw caution to the wind and invented transistors.
Up till that moment, the things could be more or less kept under control, but a broad publicity was not aware of what was going on,which soon led to a fatal mistake! Being naive in belief that cheap tricks could slow down technology development and developmentof the world and retrieve the good all days, mass market opened its doors for the products of Electronics Industry, thus closing amagic circle. A rapid drop in prices made these components available for a great variety of people. The stone was falling freely...
The first integrated circuits and processors appeared soon, which caused computers and other products of electronics to drop down in price even more. They could be bought everywhere. Another circle was closed! Ordinary people got hold of computers and computerera has begun...
While this drama was going on, hobbyists and professionals, also split in two groups and protected by anonymity, were working hardon their projects. Then, someone suddenly put a question: Why should not we make a universal component? A cheap, universalintegrated circuit that could be programmed and used in any field of electronics, device or wherever needed? Technology has beendeveloped enough as well as the market. Why not? So it happened, body and spirit were united and the first integrated circuit wasdesigned and called the MICROCONTROLLER.
Source: http://www.mikroe.com/chapters/view/64/chapter-1-introduction-to-microcontrollers/)
http://www.robots.com/education/robot-education.php?page=robot+controllershttp://www.mikroe.com/chapters/view/64/chapter-1-introduction-to-microcontrollers/http://www.mikroe.com/chapters/view/64/chapter-1-introduction-to-microcontrollers/http://www.robots.com/education/robot-education.php?page=robot+controllers -
8/10/2019 robotics handouts-part1.pdf
8/25
7
The Microcontroller
What is a Microcontroller?
A microcontroller is a small, low-cost and self-contained computer-on-a-chip that can be used as an embeddedsystem. A few microcontrollers may utilize four-bit expressions and work at clock rate frequencies, which usuallyinclude: An 8 or 16 bit microprocessor. A little measure of RAM. Programmable ROM and flash memory. Parallel and serial I/O. Timers and signal generators. Analog to Digital and Digital to Analog conversion.
Microcontrollers usually must have low-power requirements since many devices they control are battery-operated.
A microcontroller is a self-contained system with peripherals, memoryand a processor that can be used as an embedded system. Mostprogrammable microcontrollers that are used today are embedded inother consumer products or machinery including phones, peripherals,automobiles and household appliances for computer systems. Due tothat, another name for a microcontroller is " embedded controller ."Some embedded systems are more sophisticated, while others haveminimal requirements for memory and programming length and a lowsoftware complexity. Input and output devices include solenoids, LCDdisplays, relays, switches and sensors for data like humidity,temperature or light level, amongst others.
Types of Microcontroller
They are characterized by their bits, memory architecture, memory/devices and instruction set.
http://www.elprocus.com/wp-content/uploads/2013/05/types-of-microcontroller.pnghttp://www.elprocus.com/wp-content/uploads/2013/05/types-of-microcontroller.pnghttp://www.elprocus.com/wp-content/uploads/2013/05/types-of-microcontroller.pnghttp://www.elprocus.com/wp-content/uploads/2013/05/types-of-microcontroller.pnghttp://www.elprocus.com/wp-content/uploads/2013/05/types-of-microcontroller.png -
8/10/2019 robotics handouts-part1.pdf
9/25
8
Bits
The bits in microcontroller are 8-bits, 16-bits and 32-bits microcontroller.
In 8-bit microcontroller, the point when the internal bus is 8-bit then the ALU is performs the arithmetic andlogic operations. The examples of 8-bit microcontrollers are Intel 8031/8051, PIC1x and Motorola MC68HC11
families.
The 16-bit microcontroller performs greater precision and performance as compared to 8-bit. For example 8 bitmicrocontrollers can only use 8 bits, resulting in a final range of 000 0xFF (0-255) for every cycle. In contrast,16 bit microcontrollers with its 16 bit data width has a range of 00000 0xFFFF (0-65535) for every cycle. Alonger timer most extreme worth can likely prove to be useful in certain applications and circuits. It canautomatically operate on two 16 bit numbers. Some examples of 16-bit microcontroller are 16-bit MCUs areextended 8051XA, PIC2x, Intel 8096 and Motorola MC68HC12 families.
The 32-bit microcontroller uses the 32-bit instructions to perform the arithmetic and logic operations. These areused in automatically controlled devices including implantable medical devices, engine control systems, officemachines, appliances and other types of embedded systems. Some examples are Intel/Atmel 251 family, PIC3x.
Examples of Microcontrollers in the market
There are several different kinds of programmable, most common types categorized by several parameters including Bits, Flashsize, RAM size, number of input/output lines, packaging type, supply voltage and speed.
Programmable microcontrollers contain general purpose input/output pins. The number of these pins varies depending on themicrocontroller. They can be configured to an input or an output state by software. When configured to an input state, these pinscan be used to read external signals or sensors. When they are configured to the output state, they can drive external devices likeLED displays and motors.
Gizduino ATmega328 Microcontroller Arduino Microcontroller
Aceduino 328
-
8/10/2019 robotics handouts-part1.pdf
10/25
9
The Sensor
Humans (or in general any living organism) has to have some senses to become totallyautonomous. Humans have five senses vision, smell, taste, hearing and touch. If so, thenwhat do robots have?
In order for the robot to interact with the real world (human-like), we need toimplant sensors!
Sensor Fundamentals
What can we measure using sensors? Practically anything! Light, motion, temperature, magnetic fields, gravity,
humidity, vibration, pressure, electrical fields, sound, and other physical aspects of the external environment can be measured
using them. Of course there are different sensors for each purpose like IR sensors, proximity sensors, temperature sensors, tilt
sensors, accelerometers, ultrasonic sensors, RADAR, SONAR, etc.
Sensors measure attributes and interact with external events. Using a transducer , the sensor transforms the energy associatedwith what is being measured into another form of energy. In robotics, some of the items sensors measure include speed,orientation and proximity of other objects.
Sensor and Transducer
The words 'sensor' and ' transducer ' are both widely used in the description of measurement system. The word 'sensor ' is derivedfrom entire meaning 'to perceive' and 'transducer' is from transducer meaning 'to lead across' .
Sensor is a device that detects a change in a physical stimulus and turns it into a signal which can be measured or recorded.Transducer is a device that transfers power from one system to another in the same or in the different form.
The figure below shows the sensing process in terms of energy conversion. The form of the output signal will often be a voltageanalogous to the input signal, though sometimes it may be a wave form whose frequency is proportional to the input or a pulsetrain containing the information in some other form.
http://www.robots.com/education/robot-education.php?page=robot+sensorshttp://www.robots.com/education/robot-education.php?page=robot+sensorshttp://en.wikipedia.org/wiki/Sensorhttp://en.wikipedia.org/wiki/Sensorhttp://www.robots.com/education/robot-education.php?page=robot+sensorshttp://maxembedded.files.wordpress.com/2011/06/human-like-robots1.pnghttp://maxembedded.files.wordpress.com/2011/06/human-like-robots1.pnghttp://maxembedded.files.wordpress.com/2011/06/human-like-robots1.pnghttp://maxembedded.files.wordpress.com/2011/06/human-like-robots1.pnghttp://maxembedded.files.wordpress.com/2011/06/human-like-robots1.png -
8/10/2019 robotics handouts-part1.pdf
11/25
1
Every sensor in this world has three terminals:
o Vcc to power up the sensoro GND to provide a fixed negative referenceo Output analog output of the sensor (in some sensors, there may be more than one output terminals)
The following block diagram demonstrates it.
The sensor senses the physical parameters and gives a corresponding output. In most cases the output is analog. Some of the
most common sensors used in the field of robotics and embedded systems are as follows:
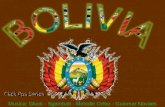
IR Sensor
IR Sensor - This is the most fundamental type of sensor available in the market. The basic
concept is simple. There is an emitter which emits infrared (IR) rays. These IR rays are
detected by a detector. This concept is used to make proximity sensor (to check if
something obstructs the path or not, etc), contrast sensors (used to detect contrast
difference between black and white, like in line follower robots), etc. The circuit diagram of
a basic IR sensor is given below. So even you can make one by yourself.
Basic Design of IR Sensor
You can also put an op-amp (comparator) in the output terminal in order to amplify the signal and also to convert the analogsensor output to a digital one.
http://maxembedded.files.wordpress.com/2011/06/basic-design-of-ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/sensor-block-diagram.pnghttp://maxembedded.files.wordpress.com/2011/06/basic-design-of-ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/sensor-block-diagram.pnghttp://maxembedded.files.wordpress.com/2011/06/basic-design-of-ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/sensor-block-diagram.pnghttp://maxembedded.files.wordpress.com/2011/06/basic-design-of-ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/sensor-block-diagram.pnghttp://maxembedded.files.wordpress.com/2011/06/basic-design-of-ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/sensor-block-diagram.pnghttp://maxembedded.files.wordpress.com/2011/06/basic-design-of-ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/ir-sensor.pnghttp://maxembedded.files.wordpress.com/2011/06/sensor-block-diagram.png -
8/10/2019 robotics handouts-part1.pdf
12/25
1
LM35
LM35 Temperature Sensor LM35 is a precision centigrade temperature sensor. It has three
terminals Vcc, Ground and Output as shown in the adjoining diagram. It has a sensitivity of
10mV/C. This means that for every degree rise in temperature, the output voltage increases by
10mV. In general, it gives a voltage of 0V at 0C. Hence, say for an output of 450mV, thetemperature is 45C. Apart from LM35, there are many other temperature sensors
like thermistors , thermocouples , etc which are widely used.
MMA7260 Tri-Axis Accelerometer
Accelerometer - An accelerometer is a device which can measure acceleration in any
direction (X, Y, Z). MMA7260 is one such tri-axis accelerometer. Even this has three major
terminals Vcc, ground and output (it has three outputs, one each for X, Y and Z). This is a
very cool stuff. You can program graphical LCDs using this, you can implement this in
humanoids (if you plan to make one) to measure the rate of fall, etc.
Camera - To give your robot the power of vision, you can put cameras on them.
Axis IP Camera
The image processing is done using software like MATLAB, OpenCV, LabVIEW, etc and then the data
is transferred to the MCU using serial communication.
Proximity Sensor
This type of sensor is capable of pointing out the
availability of a component. Generally, the proximitysensor will be placed in the robot moving part such as
end effector. This sensor will be turned ON at a specified
distance, which will be measured by means of feet or
millimeters. It is also used to find the presence of a human being in the work
volume so that the accidents can be reduced.
http://www.national.com/ds/LM/LM35.pdfhttp://www.national.com/ds/LM/LM35.pdfhttp://www.national.com/ds/LM/LM35.pdfhttp://www.national.com/ds/LM/LM35.pdfhttp://maxembedded.files.wordpress.com/2011/06/axis-ip-camera.jpghttp://maxembedded.files.wordpress.com/2011/06/mma7260-tri-axis-accelerometer.jpghttp://maxembedded.files.wordpress.com/2011/06/lm35.pnghttp://maxembedded.files.wordpress.com/2011/06/axis-ip-camera.jpghttp://maxembedded.files.wordpress.com/2011/06/mma7260-tri-axis-accelerometer.jpghttp://maxembedded.files.wordpress.com/2011/06/lm35.pnghttp://maxembedded.files.wordpress.com/2011/06/axis-ip-camera.jpghttp://maxembedded.files.wordpress.com/2011/06/mma7260-tri-axis-accelerometer.jpghttp://maxembedded.files.wordpress.com/2011/06/lm35.pnghttp://maxembedded.files.wordpress.com/2011/06/axis-ip-camera.jpghttp://maxembedded.files.wordpress.com/2011/06/mma7260-tri-axis-accelerometer.jpghttp://maxembedded.files.wordpress.com/2011/06/lm35.pnghttp://maxembedded.files.wordpress.com/2011/06/axis-ip-camera.jpghttp://maxembedded.files.wordpress.com/2011/06/mma7260-tri-axis-accelerometer.jpghttp://maxembedded.files.wordpress.com/2011/06/lm35.pnghttp://maxembedded.files.wordpress.com/2011/06/axis-ip-camera.jpghttp://maxembedded.files.wordpress.com/2011/06/mma7260-tri-axis-accelerometer.jpghttp://maxembedded.files.wordpress.com/2011/06/lm35.pnghttp://maxembedded.files.wordpress.com/2011/06/axis-ip-camera.jpghttp://maxembedded.files.wordpress.com/2011/06/mma7260-tri-axis-accelerometer.jpghttp://maxembedded.files.wordpress.com/2011/06/lm35.pnghttp://maxembedded.files.wordpress.com/2011/06/axis-ip-camera.jpghttp://maxembedded.files.wordpress.com/2011/06/mma7260-tri-axis-accelerometer.jpghttp://maxembedded.files.wordpress.com/2011/06/lm35.png -
8/10/2019 robotics handouts-part1.pdf
13/25
-
8/10/2019 robotics handouts-part1.pdf
14/25
1
ROBOTIC Actuators and Mechanism
Actuator is a device that converts an electrical control signal into mechanical motion.
The actuators are the motors and drives inside the robot body that are used to create and control motion.
An actuator is a mechanism for activating process control equipment by use of pneumatic, hydraulic, or electronicsignals.
Motors
A robot is a system that can automate some tasks called freedoms . The most important and popular actuator is amotor, which allows the robot to control a wheel, a switch or even an arm
There are different types of motors
a. DC Motors Direct Current ( DC) motors
b. AC Motors Alternating Current ( AC) motors
c. Inductive motors
Motors also have different ways to control them
Increasing or decreasing the voltage ( stepper motors ) Slowing or speeding up the motor using a feedback loop ( servo motors )
Stepper Motors
Stepper - A type of brushless servo motor, this motor is generally electric and moves or rotates in small discrete steps. Stepper
motors offer many advantages, such as dual compatibility with both analog and digital feedback signals. They can be used to
easily accelerate a load because the maximum dynamic torque occurs at low pulse rates. Drawbacks of their use include low
efficiency; much of the input energy is dissipated as heat and the inputs must be matched to the motor and load. The load should
be carefully analyzed for optimal performance. Damping may be required when load inertia is exceptionally high to prevent
oscillation.
Stepper motors contain several coils of wire. The coils are switched on and off in a special sequence of steps to turn the shaft.These motors are very precise because they can be made to turn through an exact number of steps. They are used in products
such as printers, CNC machines, scanners and robotic devices.
http://www.robots.com/education/robot-education.php?page=actuatorshttp://www.robots.com/education/robot-education.php?page=actuatorshttp://www.robots.com/education/robot-education.php?page=actuators -
8/10/2019 robotics handouts-part1.pdf
15/25
1
Servo Motors
Used to control the wheels of a robot, or an arm
A popular control method is the pulse width modulation (PWM) scheme
By varying the pulse width we can
Increase/decrease the speed of the motor Change the direction of the motor Stop
AC Servo Motors - Used in applications that require a rapid and accurate response, these
motors are basically two-phase, reversible induction motors that are modified for servo
operation. AC Servo motors have a small diameter and high resistance rotors. This design
provides low inertia for fast starts, stops, and reversals. AC Servo Motors can also be
classified as asynchronous or synchronous.
Pneumatic - Powered by the conversion of compressed air, these actuators are used to control processesthat require a quick and accurate response, but not a large amount of force. These compact and lightweightactuators are less energy efficient than electric motors.
Hydraulic - With the ability to convert hydraulic pressure and flow into torque and rotation, these actuatorscan be used when a large amount of force is needed. The most common example is a piston. This motor useshydraulic fluid under pressure to drive machinery. The energy comes from the flow and pressure, not thekinetic energy of the flow.
Brushless DC Servo - This synchronous electric motor features permanent magnet
poles on the rotor, which are attracted to the rotating poles of the opposite magnetic
polarity in the stator creating torque. It is powered by a DC current that has an
electronically controlled commutation system instead of a system based on brushes.
Current, torque, voltage, and rpm are linearly related. The advantages of a brushless
motor include higher efficiency and reliability, reduced noise, longer lifetime (no
brush erosion), elimination of ionizing sparks from the commutator, and an overall
reduction of electromagnetic interference (EMI).
Brushed DC Servo - The classic DC motor generates an oscillating current in a rotor with a
split ring commutator, and either a wound or permanent magnet stator. A coil is wound
around the rotor, which is then powered by a battery. The rotational speed is proportional
to the voltage applied to it and the torque is proportional to the current. Speed control
can be achieved by applying tape to the battery, varying the supply voltage, resistors, or
electronic controls. The advantage to using a brushed motor over a brushless is cost. The
brushless motor requires more complex electronic speed controls; however a brushed DC
motor can be regulated by a simple variable resistor, such as a potentiometer or rheostat. This is not efficient, but proves
satisfactory for cost-sensitive applications.
-
8/10/2019 robotics handouts-part1.pdf
16/25
1
Basic Electricity and Electronics
Understanding the concepts of electricity and the use of various electrical and electronic components will help you to incorporatebasic functions such as lighting a bulb, sounding a buzzer, running a motor and turning on a light-emitting diode for your designproject. You will also explore other components: different types of switches, resistors, transistors, sensors, potentiometers,thyristors, capacitors and integrated circuits that can be used to control how your robot behave. Finally, to help you ensure thatyour final solution is feasible.
Electronic Systems
Electronic circuits are sometimes referred to as electronic systems.
An electronic system has:
An INPUT for gathering information; A PROCESS for deciding what to do with the information; and An OUTPUT, which normally involves switching a device on or off.
CONDUCTORS AND INSULATORS
Electricity flows grease ease through some materials than others
An electrical conductor is a material that allows electricity to flow through easily.(e.g. aluminum, copper, silver, gold, and most metals )
An electrical insulator is a material that electricity cannot flowthrough easily. (e.g. rubber, wood, glass and most plastics)
PROCESS(microchip)
OUTPUT(display screen)
INPUT(press switch)
-
8/10/2019 robotics handouts-part1.pdf
17/25
1
Power Supply
An electric and electronic products need power to run them.
Mains Power
Some electrical products we use require mains power. Main power is produced by huge generators at apower station and the electricity is then supplied to our homes, schools and workplaces via thick
underground cables. Some products use more electricity than others.
Mains power has an alternating current (A.C.) which means that theflow of electricity continually changes direction in a circuit. In fact, itchanges 50 times every second. Many electrical products require adirect current (D.C.) supply, which constantly flows in one direction.These products have converters that convert the A.C. into D.C.
Batteries
The most common source of power is the battery. Batteries come in all shapesand sizes; from miniature button cells for watches and calculators, to largepower packs for starting the engines of jumbo jets. Dry cell batteries containedin metal casings and are made in different sizes
Dry cell batteries
Button cell batteries
Batteries have a positive and a negative terminal . These are identified with a + and a - signrespectively.
-
8/10/2019 robotics handouts-part1.pdf
18/25
1
Switches
In our everyday life, we come across different switches;
For turning lights on or off; When using telephone buttons; and For turning radios and computer on or off.
Switches are used to make or break a circuit. A simple switch has two contacts:
OPEN position the contacts are not connected so no current will flow through the switch; CLOSED position the contacts are connected so current is able to flow through the switch.
Open closed
Battery, bulb and switch connected in series
bulb
switch
+
-
battery
-
8/10/2019 robotics handouts-part1.pdf
19/25
1
OUTPUT COMPONENTS
Components that move, light up or make a noise are called output components.
Giving off Light and Sound
When an electronic current passes through the filament bulb , the filament gets hot and glows.
Buzzers make a loudNoise when connected to a battery.They are often used as warmingdevices. Connect the red wire to thepositive contact and the black wire tothe negative contact
Creating Motion
Motors are often used to turn wheels, gears, cams or pulleys.Motors have two terminals that connect to a battery. The directionof turning depends on the way the battery wires are connected tothe terminals. Motors need a lot of current to make them work-especially the bigger motors.
-
8/10/2019 robotics handouts-part1.pdf
20/25
1
Controlling Current Flow
A light-emitting diode (LED) is simply a diode that lights up when current flows through one direction only
.One side of an LED has a flat edge. The leg next to thisedge is the cathode , which must be connected to a negative
terminal in the circuit. The other leg is the anode , whichconnects to a positive terminal
LEDs are made in different colours. They last much longer than filament
bulbs and use a fraction of the current.
Ultra-bright LEDs glow with an intense light and are used in traffic lights, torches and rear lights on somecars and buses.
-
8/10/2019 robotics handouts-part1.pdf
21/25
2
Resistors
Resistors are the most commonly used component in electronics and theirpurpose is to create specified values of current and voltage in a circuit.
Resistors are used to protect other components from being damaged by reducing
excessively high currents in the circuit. They are made in different values. Thehigher the value, the greater the resistance.
An LED works at about 2 V. If it was connected directly to a 9 V battery, it wouldburn out quickly. A resistor is to be connected in series with the LED to reduce the currentand protect the LED.
Resistance is measured in ohms ( ). The ohm is named after the German scientist, Georg Simon Ohm,who was born in 1798.
Larger values of resistance are measured in kilohms ( k) or megaohms (M).
1 k = 1000 1 M = 1,000,000
Letters are sometimes used instead of the symbol.
100 R = 100 4 k 7 = 4.7k 4M 7 = 4.7M
What is the function of a Resistor?
The main function of the resistor is to reduce the flow of electric current.
Example:
One of the most important things to remember about a LED is thecharacteristic voltage that appears across it when connected to a voltage. Thisdoes not change with brightness and cannot be altered. For a LED, this voltageis 1.7v and if you supply it with more than this voltage, it will bedamaged. The easy solution is to place a resistor on one lead as shown inthe diagram below:
The LED will allow the exact voltage to appear across it and the brightness willdepend on the value of the resistor.
-
8/10/2019 robotics handouts-part1.pdf
22/25
-
8/10/2019 robotics handouts-part1.pdf
23/25
-
8/10/2019 robotics handouts-part1.pdf
24/25
-
8/10/2019 robotics handouts-part1.pdf
25/25
References:
http://mechatronics.poly.edu/smart/pdf/Intro2Robotics.pdf
http://www.robots.com/education
http://www.mfg.mtu.edu/cyberman/machtool/machtool/sensors/intro.html
http://www.elprocus.com/types-of-microcontrollers/
http://mechatronics.poly.edu/smart/pdf/Intro2Robotics.pdfhttp://www.robots.com/educationhttp://www.mfg.mtu.edu/cyberman/machtool/machtool/sensors/intro.htmlhttp://www.elprocus.com/types-of-microcontrollers/http://www.elprocus.com/types-of-microcontrollers/http://www.elprocus.com/types-of-microcontrollers/http://www.mfg.mtu.edu/cyberman/machtool/machtool/sensors/intro.htmlhttp://www.robots.com/educationhttp://mechatronics.poly.edu/smart/pdf/Intro2Robotics.pdf