
An Improved RANSAC homography Algorithm for Feature Based ...
Upload
hamid-bazarganiCategory
view
110download
4
Real-Time Recognition of Planar Targets
on Mobile Devices A Framework for Fast and Robust Homography Estimation
School of Electrical & Computer Engineering
Faculty of Engineering
Hamid Bazargani
August 2014

Page 2 / 26
Outline
• Introduction and motivations
• System overview and background
• Methodology
– Robust target matching framework
– Robust model estimation
• Experimentation
• Conclusion
Faculty of Engineering
VIVA Lab
Page 3 / 26
Introduction
Faculty of Engineering
VIVA Lab
/ Objectives
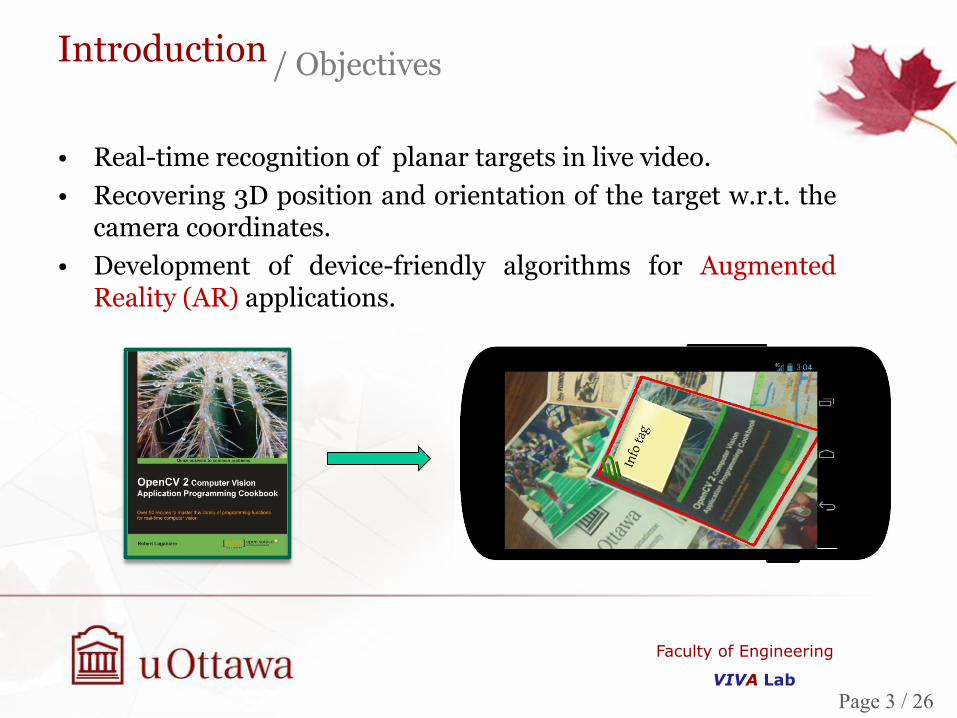
• Real-time recognition of planar targets in live video.
• Recovering 3D position and orientation of the target w.r.t. the camera coordinates.
• Development of device-friendly algorithms for Augmented Reality (AR) applications.

Page 4 / 26
Motivations
Faculty of Engineering
VIVA Lab
/ How AR they working?
• The tremendous growth in popularity of mobile phones, has made AR one of the most innovative technologies of the decade.
• AR is something that will happen in our life because we have the tools to make it happen.
• The technology behind several of these thriving AR applications is based on computer vision and object recognition algorithms.

Page 5 / 26
Motivations
Faculty of Engineering
VIVA Lab
/ Application demo
AR will be, is now becoming the 8th mass medium. Tomi Ahonen

Page 6 / 26
System Overview
Faculty of Engineering
VIVA Lab
/ Flow diagram
• Detect stable features • FAST-9 feature detector
• Describe local features • Descriptor-base approach • Classification-based approach
• Homography estimation • RANSAC-based strategy
Robust estimation
Feature matching
Feature detection

Page 7 / 26
System Overview
Faculty of Engineering
VIVA Lab
/ Feature matching
1. Local descriptor-based approach
• Local information is abstracted by descriptors.
• SIFT, SURF, HoG, KAZE, etc.
2. Global classification-based approach
• Train a classifier through an offline process from view synthesis.
• A huge amount of computations is transferred to the offline process.
• Random trees, Ferns, HIP are some classification methods.
• Training BRIEF binary descriptors .
• Uses Hamming distance as a similarity score.

Page 8 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ Robust Homography estimation
• Real-time estimation of 2D homographic transformation that describes the set of putative correspondences.
• Depending on the quality of target descriptors, the match set will be contaminated by more or less large number of false matches (outliers).
• A robust framework based on RANdom SAmpleing Concensus (RANSAC) is proposed to cope with this uncertainty.

Page 9 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ What is RANSAC ?
• Randomly select a
minimal set.
• Hypothesize model (by
Gaussian elimination).
• Verify all points.
• Evaluate support.
• Update iteration
bound by the best
support achieved.
Hypothesis Verify

Page 10 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ PROSAC non-uniform sampling
• Compared to typical RANSAC, PROSAC greatly reduces the number of attempts for the best support hypothesis.
• Uses non-uniform sampling strategy from a smaller subset of data points determined by a growth function g(t).
• Hamming distance is used to sort correspondences based on their similarity score.

Page 11 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ Termination criterion 1/3
• Maximality: Taking desired level of confidence into account, one can determine maximum number of required iterations to guaranty this level of confidence.
• is level of confidence (typically set to 0.9-0.99). • is the lower bound for inliers’ rate.
0

Page 12 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ Termination criterion 2/3
• Non-Randomness : Non-randomness constraint is a statistical significance test that guaranties the goodness of a solution.
• The probability distribution of evaluating i outliers out of n points all
consistent with the sought model abides by the binomial distribution.
• is the probability of a random point evaluated as inlier given a degenerate model.
• is significance level (5-10 percent).

Page 13 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ Termination criterion 3/3
• Chi-squared approximation: Considering the randomness of a solution as a null hypothesis H0, p-value determines the significance of rejecting H0, given a specific level .
• From the central limit theorem, for sufficiently large n, binomial PDF is approximately a standard normal distribution with and . Thus:

Page 14 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ Model verification 1/2
• For evaluating hypothesis, the standard RANSAC model verification can be further optimized by quick hypothesis filtering strategies such as the Td,d test or the Sequential Probability Ratio Test (SPRT) .
• The Td,d test
• In the 1st step, a small portion of N data points are verified from a randomly selected subset. The 2nd involves verification of remaining data only if the pre-test passes.
• It is proven that the optimal solution minimizing the average number of verified points leads us to the T1,1 (d = 1) .

Page 15 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ Model verification 2/2
• The SPRT test:
• SPRT is a statistical test based on Wald’s theory for earlier decision taking on rejecting a model.
• Wald’s likelihood ratio:
• is approximately equal to inliers’ ratio.
• is Bernoulli distributed probability function.

Page 16 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/ H estimation performance
1x 1.3x 5.5x

Page 17 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/ GE vs. SVD
• GE is experimentally found that produces acceptable results.
• SVD is much slower but numerically more stable than GE. • Degeneracy test avoids geometrically unstable solutions.
• PROSAC complements GE .
Boyd's Law of Iteration:
Speed of iteration beats quality of iteration.

Page 18 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/ Recognition rate

Page 19 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/ Recognition rate

Page 20 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/ Accuracy

Page 21 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/ Verifications
5-10x

Page 22 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/ Termination criteria
3-30x 3-30x

Page 23 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/Termination criteria speed

Page 24 / 26
Results & Findings
Faculty of Engineering
VIVA Lab
/ Overall Speed
95182482
76378479 65033425
103329328
17504443
3428717 366915 0
20000000
40000000
60000000
80000000
100000000
120000000
OpenCV 2.4 RANSAC
RANSAC + OpenCV 2.4
SVD
PROSAC + OpenCV 2.4
SVD
PROSAC + LAPAC
DGESVD
PROSAC + GE
PROSAC + optimized
GE
PROSAC + optimized
GE + SPRT
• Recognition process runs at around 40 fps on a smart-phone with Quad-core 1.4 GHz Cortex-A9 processor and at 80 fps on a machine equipped with a 2.26 GHz CPU.
Real-time: 75,333,333 cycles

Page 25 / 26
Conclusion
Faculty of Engineering
VIVA Lab
• Comprehensive study of several robust estimation algorithms in the context of homography estimation.
• Highly optimized framework for throughput leveraging the state-of-the-art methodologies. Available in :
• Reference C implementation. • SSE-optimized implementation. • https://github.com/VIVAlab/FastGEHomography
• Publication: • Hamid Bazargani, Olexa Bilaniuk, Robert Laganiere: Fast
Target Recognition on Mobile Devices: Revisiting Gaussian Elimination for the Estimation of Planar Homographies. In Computer Vision and Pattern Recognition Workshops, 2014.
/ Contributions

Page 26 / 26
Q & A
Faculty of Engineering
VIVA Lab
Thank you!

Page 29 / 26
Methodology
Faculty of Engineering
VIVA Lab
/ Termination criterion 3/3

















