
Proyecto de tesis- Brain Computer Interface
18
PROYECTO DE INVESTIGACIÓN DE FIN DE CARRERA PARA OBTENER EL GRADO DE BACHELLER EN INGENIERIA DE MECATRÓNICA DISEÑO DE UN SISTEMA DE CONTROL DE UN DISPOSITIVO ROBÓTICO CON UN SISTEMA BCI EMPLEANDO PROCESAMIENTO DE SEÑALES CEREBRALES TESISTA: CORONADO BAUTISTA JAVIER CONTENIDO: 1. INTRODUCCION 2. PLANTEAMIENTO DE PROBLEMA 3. OBJETIVOS 4. MARCO TEORICO 5. NATURALEZA DE LAS SEÑALES DE LA EEG 6. DESCRIPCION DE UN SISTEMA BCI A DESARRILLAR 7. SISTEMA DE ADQUSICION DESARROLLADO EN LA UNIVERSIDAD DE MÁLAGA 8. CONCLUSIONES 9. BIBLIOGRAFIA PRESENTACIÓN Este proyecto de investigación fue desarrollado por Coronado Bautista Javier estudiante de la escuela profesional de ingeniería de Mecatrónica de la Universidad Nacioanal Federico Villarreal como un trabajo de fin de carrera para obtener el grado de bacheller en ingenieria de mecatrónica.
-
Upload
javier-coronado -
Category
Engineering
-
view
316 -
download
5
Transcript of Proyecto de tesis- Brain Computer Interface

PROYECTO DE INVESTIGACIÓN DE FIN DE CARRERA PARA OBTENER EL GRADO DE BACHELLER EN
INGENIERIA DE MECATRÓNICA
DISEÑO DE UN SISTEMA DE CONTROL DE UN DISPOSITIVO ROBÓTICO CON UN SISTEMA BCI EMPLEANDO
PROCESAMIENTO DE SEÑALES CEREBRALES
TESISTA: CORONADO BAUTISTA JAVIER
CONTENIDO:
1. INTRODUCCION
2. PLANTEAMIENTO DE PROBLEMA
3. OBJETIVOS
4. MARCO TEORICO
5. NATURALEZA DE LAS SEÑALES DE LA EEG
6. DESCRIPCION DE UN SISTEMA BCI A DESARRILLAR
7. SISTEMA DE ADQUSICION DESARROLLADO EN LA UNIVERSIDAD DE MÁLAGA
8. CONCLUSIONES
9. BIBLIOGRAFIA
PRESENTACIÓN
Este proyecto de investigación fue desarrollado por Coronado Bautista Javier estudiante de la
escuela profesional de ingeniería de Mecatrónica de la Universidad Nacioanal Federico Villarreal
como un trabajo de fin de carrera para obtener el grado de bacheller en ingenieria de
mecatrónica.

1
1-INTRODUCIÓN
Un sistema interfaz cerebro computador es un sistema de comunicación basado en señales
cerebrales(EEG), siendo el electroencefalograma la base y soporte de la tecnología BCI. Fue, en
el año 1929 el neurólogo alemán Hans Beger, quien, por primera vez logro observar y registrar
la actividad cerebral (variación de señales eléctricas) de un paciente en un galvanómetro,
Construyendo así los cimientos del estudio de la electroencefalografía.
Brain computer interfaces (BCI), es una novedosa tecnología basada en el registro de las señales
EEG, que permite la interacción del hombre con la máquina y con su entorno físico. En los
últimos años dichos sistemas han suscitado el interés de los importantes centros de
investigación a nivel mundial. Actualmente existen diversos programas y proyectos enfocados
en el desarrollo de la tecnología de sistemas BCI en los diversos campos de la ciencia como la
medicina, robótica, industria militar, y la rehabilitación fisiología.
Titulo:
Diseño de un sistema de control de un dispositivo robótico, con un sistema BCI, empleando
procesamiento de señales cerebrales.
Palabras claves:
Interfaz cerebro ordenador, dispositivo robótico, señales cerebrales, red neuronal, canal de
comunicación.
2.-PLANTEAMIENTO DEL PROBLEMA
La necesidad de desarrollar un sistema de interfaz cerebro ordenador (sistema BCI) surge a partir
de la posibilidad de interacción del hombre con la máquina mediante la traducción de nuestros
pensamientos, intenciones en interacción real con el entorno y el mundo físico.
¿Qué efecto tendrá el desarrollo de un sistema de interacción hombre _maquina en nuestra
sociedad peruana?
¿Cuál es la probabilidad de desarrollar este tipo de sistemas en el Perú?
3.-OBJETIVOS
3.1.-OBJETIVO GENERAL:
Diseñar un sistema de control para un dispositivo robótico mediante el desarrollo de un interfaz
cerebro _computadora empleando procesamiento de señales cerebrales con la finalidad de
brindar apoyo a aquellas personas con enfermedades neuromusculares severas, personas con
distintas discapacidades como la esclerosis lateral miotrópica, desorden motriz severo, parálisis
cerebral parcial o total, creando para ello un canal de comunicación entre el cerebro y un
ordenador.

2
3.2.-OBJETIVO ESPECIFICO:
• Desarrollar un canal de comunicación cerebro ordenador portable
• Diseño del algoritmo de Adquisición de datos (registro de la actividad eléctrica)
• Pre procesamiento de señales cerebrales
• Procesamiento de señales EEG muestreadas
• Desarrollar el algoritmo de clasificación basada en una red neuronal
• Diseñar un algoritmo para soporte de base de datos para el sistema
• Desarrollo de la interfaz gráfica del usuario, basada en un feedback de realidad virtual
• Desarrollo de adquisición de datos en la Escuela Técnica Superior de Ingeniería de
Telecomunicaciones de la Universidad de Málaga
3.3.-JUSTIFICACION:
Recuperar o sustituir funciones motoras ha sido uno de las áreas más fascinantes pero
frustrantes de las investigaciones del último siglo. La posibilidad de interconectar el sistema
nervioso humano con un sistema robótico o mecatrónico, y usar este concepto para recuperar
alguna función motora, ha fascinado a los científicos e investigadores durante años. Uno de los
aspectos que ha permitido estos desarrollos ha sido el avance en tecnología BCI, dado que son
sistemas que permiten traducir en tiempo real la actividad eléctrica resultado del pensamiento
en órdenes para controlar directamente dispositivos robóticos mediante un canal de
comunicación directa desde el sistema nervioso central con los dispositivos, evitando el uso de
los caminos neuronales que ya no pueden ser utilizados normalmente debido a la presencia
de enfermedades neuromusculares, esclerosis lateral amiotrófica, infarto cerebral, parálisis
cerebral o lesiones en la columna vertebral. Los pacientes, puedan beneficiarse de esta
tecnología para comunicarse o realizar acciones que le permitan mejorar su calidad de vida
4.-MARCO TEORICO
4.1.-ESTADO DE LA TECNOLOGÍA DE SISTEMA BCI EN EL MUNDO:
En 2007 se creó un panel de expertos para estudiar el estado de la tecnología BCI en el mundo.
Se identificaron los siguientes aspectos. En primer lugar, hay esfuerzos en esta línea muy
significativa en Estados Unidos, Europa y en Asia, donde claramente la cantidad de investigación
en esta materia es a aumentar. En segundo lugar, el estado actual de la BCI está, sino apunto,
ya entrando en la generación de dispositivos médicos, aunque se espera que tenga una fuerte
aceleración en áreas no técnicas y en entornos más comerciales como los videojuegos, la
industria de automoción y la robótica. En tercer lugar, los esfuerzos de los investigadores están
orientados hacia las tecnologías invasivas en los Estados Unidos, las no invasivas en Europa y la
sinergia entre los dos tipos de interfaces y la robótica en Japón.

3
En términos de financiación, en Europa se están proponiendo y desarrollando una gran
cantidad de programas en gran medida orientados a dispositivos robóticos controlados con un
sistema BCI. El rango de financiación para estas iniciativas es multidisciplinar y multifuncional,
lo que hace que se logren amplios márgenes de financiamiento en relación a los programas
estadounidenses y canadienses. En el caso de los Estados Unidos, se han empujado programas
para desarrollar prótesis neural y BCIs, sin embargo, los fondos privados todavía no han tenido
el impacto necesario para hacerse significativos. En está, se han lanzado iniciativas de
financiación para apoyar empresas innovadoras y de transferencia de tecnología, pero se está
lejos de llegar a prototipos para comercializar. En el caso Asia y en particular de China, se ha
invertido en programas de ciencias biológicas e ingeniería, lo que ha hecho crecer la inversión
en sistemas BCI y en áreas relacionados. En el caso de Japón, se está incrementando en gran
medida los programas en institutos y laboratorios orientados hacia la inversión en BCI. En
particular, Japón está enfocándose hacia aplicaciones no médicas siempre en relación con
programas de robótica.
Enfocando la atención en Europa, el programa director de la investigación en los próximos años
en el "VII programa Marco de la EU (2007-2013)."En relación con las TIC Información and
Comunication Technologies en el programa de trabajo, el Challenge7: ICTfor Independent Living,
Inclision and Governance reserva en Challege 7.2 exclusivo para interfaces BCI no invasivas.
4.2.-HIPOTESIS:
"Diseño de un sistema de control de un dispositivo robótico, con un sistema BCI, empleando
procesamiento de señales cerebrales."
5.-NATURALEZA DE LAS SEÑALES EEG (ELECTROENCEFALOGRAFIA)
Mucho se ha descubierto sobre la naturaleza de las señales EEG, pero todavía persisten muchos
misterios.
Como un BCI se alimenta a partir de señales cerebrales el conocimiento de la naturaleza de
estas cumple un rol muy importante en el diseño del sistema. Por un lado, esto permite la
selección de las señales que contienen la información apropiada y por otro, apoya el diseño de
los algoritmos de procesamiento y extracción de características.
La falta de conocimiento de la naturaleza de las señales EEG impide el diseño de un BCI, ya que
se ha mostrado en estudios que la utilización de técnicas tradicionales de procesamiento de
señales no basta para generar resultados aceptables.
Un electroencefalograma es un registro de potenciales eléctrico del cerebro. Estos se adquieren
a partir de sensores llamados electrodos que se fijan sobre el cuero cabelludo del sujeto, la
función de un electrodo consiste en recoger pasivamente potenciales eléctricos provenientes
de un banco de neuronas que se ubican principalmente en la corteza cerebral. El nivel de estas
señales es del orden de los micro voltios. La razón señal a ruido debe mantenerse lo más alta
posible durante esta adquisición. Es por esta razón que un electrodo se construye a partir de un
material altamente conductivo, como Oro (Au), plata (Ag), o cloruro de plata (AgCl), además
entre el cuero cabelludo del sujeto y el electrodo se utilizan pasta conductora para asegurar una
buena conductividad.

4
Los últimos avances en esta tecnología han dado origen a los electrodos activos, que poseen un
microcircuito eléctrico en el propio electrodo para mejorar la calidad dela señal adquirida. Tras
la captura del potencial eléctrico, este es amplificado por un factor de ganancia del orden de 20
000 y luego digitalizado.
El diseño de nuestro sistema BCI se basa en el monitoreo de las ondas Beta y Mu, principalmente
debido a que estás se relacionan con la acción e imaginación de los movimientos de la mano
derecha e izquierda, además las personas pueden aprender a controlar su amplitud realizando
tareas mentales apropiados.
El sistema 10 / 20 o sistema internacional 10/20, es un método reconocido internacionalmente
para describir y aplicar la ubicación de los electrodos en el cuero cabelludo para realizar ensayos
o experimentos para registrar las señales electroencefalogramas(EEG).
Figura 1
Nota:
En la figura 1 para registrar la actividad cerebral emplearemos los electrodos T6,F8, P4,F4, Pz,Fz,
P3,F3 y T5,F7 debido a la configuración bipolar empleada.

5
6.- DESCRIPCION DE UN SISTEMA BCI A DESARROLLAR
Figura 2
SUJETO:
El sujeto realiza Tareas Mentales relacionados con el movimiento, con la finalidad de controlar
el dispositivo robótico.
ADQUESICION DE LA SEÑAL:
Es la etapa que consta del registro de las señales eléctricas de la actividad cerebral entre dos
puntos específicos del cerebro (C3, C4), empleando el sistema internacional (10/20) a través de
unos electrodos especiales que tengan baja resistividad y alta conductividad, empleando para
ello un método no invasivo, para mejorar la conductividad entre el cuero cabelludo y los
electrodos se emplea una pasta conductora.
Las señales fisiológicas registradas son atenuadas y amplificadas empleando un amplificador
diferencial con la finalidad de mejorar la calidad de la señal registrada, cabe recalcar que la
amplificación de estas es de suma importancia, para su posterior pre procesado, procesado y
determinación de las bandas reactivas relacionados con los movimientos.
SUJETO
ADQUISICIONDE SEÑAL EEG
ESTRACCION DE CARACTERISTICAS
CLASICIFACIÓN
FEEDBACK VIRTUAL REALITY
RESPUESTA

6
Para realizar la tarea de adquisición de datos y el muestreo de las señales fisiológicas, se empleó
una tarjeta de adquisición de datos de National Instruments NI USB 6210 de 16 bits de
resolución.
El proceso de adquisición de señales cerebrales, fue desarrollada por mi persona en la Escuela
Técnica Superior de Informática de la universidad de Málaga, contando con el asesoramiento
del doctor Ricardo Ron Angevin y el doctor Gonzalo Joya Caparros, investigadores de la
Universidad de Málaga.
ESTRACCION DE CARACTERISTICAS:
Una vez adquiridas y muestreada las señales, se procede con la etapa de procesamiento con la
finalidad eliminar los artefactos como EOG, EMG que no son de nuestro interés. Empleando un
filtrado adaptivo para mejorar la calidad y determinar la banda reactiva, emplearemos FFT con
la finalidad de extraer los parámetros que caracterizan los ritmos sensoriomotora mu y beta
relacionados con la tarea mental de imaginación de movimiento, los parámetros que están
relacionados con la imaginación de movimientos son patrones que pasaran a la siguiente etapa
para alimentar al clasificador.
CLASIFICACION
El vector característica parametrizado es analizado y etiquetado. Esta clasificación se basa en la
decodificación y el reconocimiento de los patrones que caracterizan a las tareas mentales
relacionados con la imaginación de movimientos dando como respuesta un conjunto de
comandos etiquetados que ejecutan una acción de control sobre el dispositivo robótico.
La clasificación se fundamenta de una red neuronal auto organizado que cumple la función de
determinar si la tarea mental del sujeto corresponde a una u otro clase del estado del sujeto.
RESPUESTA:
Los comandos etiquetados se decodifican y se transforman en ordenes que activaran el sistema
de control del dispositivo robótico en función a un feedback en realidad virtual.
Nota: el feedback representa un estímulo visual para ejercer control sobre el dispositivo
robótico.
SUJETO
FEEDBACK

7
7.- SISTEMA DE ADQUSICION DESARROLLADO EN LA UNIVERSIDAD DE MÁLAGA
La Escuela Técnica Superior de Ingeniería de Telecomunicaciones de la Universidad de Málaga
por intermedio del Doctor Ricardo Ron Angevin responsable del grupo de investigación DIANA y
el Doctor Gonzalo Joya Caparros director de la ETSIT, nos brindaron la instrumentación
requerida para validar nuestra tarjeta de adquisición y amplificación de las señales EEG, además
nos brindó los accesos a los laboratorios y los servicios académicos que se imparten en la ETSIT
desde el primer día de presentación en la ETSIT.
Durante mi estancia en la ETSIT mi persona se ha dedicado exclusivamente a la parte de adquision de datos, su posterior pre procesamiento con un filtro adaptativo y la extracción de características de las señales EEG de nuestro interés mediante un análisis de espectro de potencia, obteniendo así los datos para su clasificación, para realizar esta tarea el doctor Ricardo Ron Angevin fue mi asesor y tutor quien me brindo toda la instrumentación requerida para desarrollar la etapa de adquision y pre procesamiento de señales cerebrales, además me facilito el software del sistema BCI desarrollado por su grupo de investigación, para validar si las señales que registraba correspondían a señales EEG.
El objetivo principal de mi estancia fue validar las señales EEG con la instrumentación del grupo de investigación en sistema BCI de la ETSIT de la universidad de Málaga.
Todo el componente de la adquisición de datos, y su relación entre sí desarrollados en la universidad de Málaga implementados se detalla y se muestran a continuación. Figura 3
SISTEMA DE ADQUISICION DE DATOS
Figura- 4
En la figura-4, tenemos una muestra de una señal registrada durante 8 segundos
FENOMENO FÍSICO
SENSORES ELECTRODOS
SS
ACONDICIONAMIENTO DE SEÑAL
HADWARE DE ADQUISICION
ORDENADOR SOFTWARE MATLAB
ANALISIS DE DATOS
8
7.1.-AQUISICION DE DATOS DE SEÑALES CEREBRALES
La adquisición de datos es un proceso que consiste en el registro de fenómenos físicos (señales analógicas) del mundo real, que serán estudiadas, tratadas y procesadas en un ordenador, haciendo uso de un hardware y un software empleando el Data Acquisition Toolbox ™DAQ, que describiremos a continuación.
7.1.1.-FENOMENO FÍSICO
En nuestro caso el fenómeno físico corresponde a las señales eléctricas del cerebro humano a registrar empleado los electrodos de alta conductividad.
7.1.2.-SENSORES
Los sensores empleados para la adquision de señales cerebrales son los electrodos de plata (Ag) y el cloruro de plata(ClAg.)
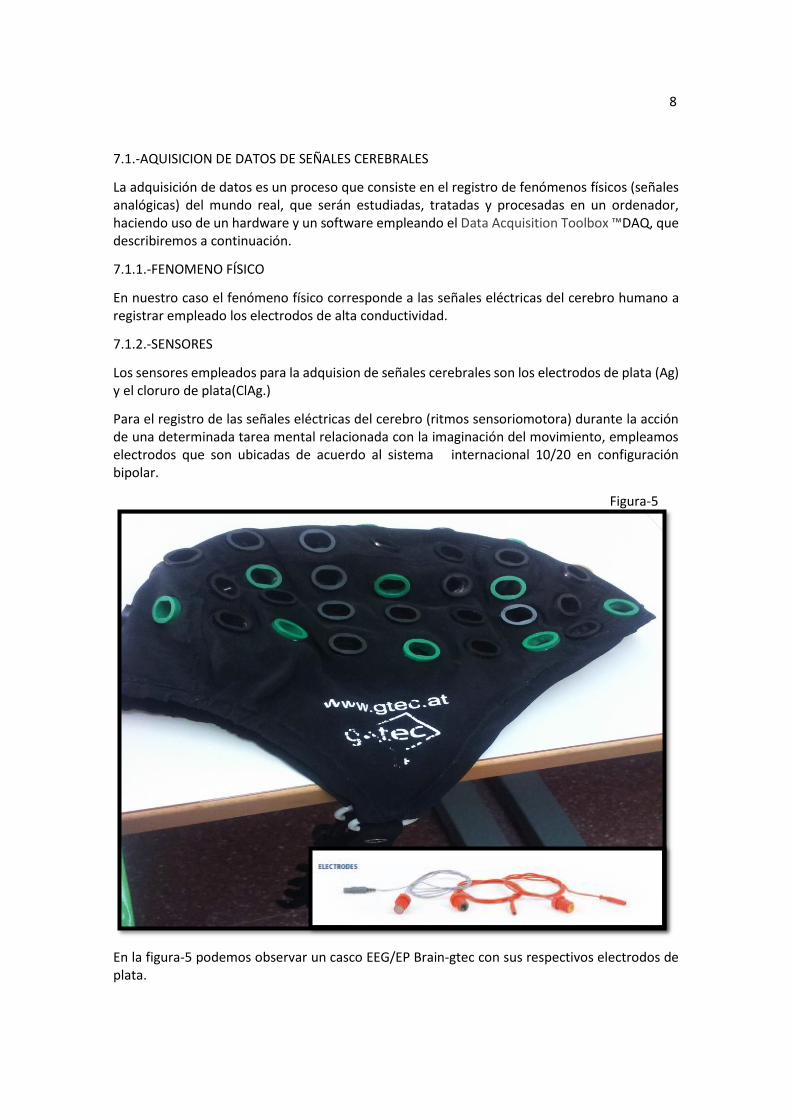
Para el registro de las señales eléctricas del cerebro (ritmos sensoriomotora) durante la acción de una determinada tarea mental relacionada con la imaginación del movimiento, empleamos electrodos que son ubicadas de acuerdo al sistema internacional 10/20 en configuración bipolar.
Figura-5
En la figura-5 podemos observar un casco EEG/EP Brain-gtec con sus respectivos electrodos de plata.

9
7.1.3.-ACONDICIONAMIENTO DE SEÑALES CEREBRALES
El acondicionamiento de la señal eléctrica del cerebro se realizó con el amplificador Biosignal
Amplifier - g. BSamp en modo diferencial, del grupo de investigación DIANA del Dr. Ricardo Ron Angevin.
Todos los procesos de pruebas e experimentación se desarrollaron en el laboratorio de la ETSI de la universidad de Málaga a cargo del director del departamento de ETSI de electrónica el doctor Gonzalo Goya Caparros.
Biosignal Amplifier - g. BSamp Figura -6
ADQUISICION DE SEÑALES CEREBRALES PARA UN SISTEMA BCI
Para la adquision de datos se desarrolló un algoritmo en Matlab para registrar la actividad eléctrica del cerebro, para lograr el objetivo se empleó una tarjeta de adquisición de datos de National Instruments el NI USB 6210 y el Toolbox daq de Matlab 2015a. Figura-7

10
CARACTEREISTICAS TECNICAS DEL NI USB 6210
Fuente: National Instruments.
16 entradas analógicas (16 bits, 250 kS/s)
4 entradas digitales; 4 salidas digitales; dos contadores de 32 bits
Energizado por bus USB para una mayor movilidad, conectividad de señal integrada
NI Signal Streaming para transferencia de datos sostenida a alta velocidad a través de USB
Compatibilidad con LabVIEW, LabWindows™/CVI y Measurement Studio para Visual Studio .NET
El software de NI-DAQmx y software interactivo LabVIEW SignalExpress LE para registro de dato
ORDENADOR:
El ordenador es una herramienta indispensable desde el momento de adquisición de datos, procesamiento y clasificación de las tareas mentales que están relacionados con el estado del individuo, además de facilitar al sujeto la interacción con el sistema BCI mediante un feedback para el control de un dispositivo robótico.
Figura-8
En la figura-8 podemos observar el procesamiento y análisis de las señales EGG de los canales C3, CZ Y C4 correspondientes a las regiones motoras del cerebro.
Nota: Como herramienta de desarrollo CAD emplearemos MATLAB para realizar todo el procedimiento del sistema BCI.

11
Para desarrollar el programa de adquision de datos en tiempo real primeramente realice una investigación minuciosa relacionada con la adquision de señales analógicas empleando la tarjeta de National Instrument, además cabe mencionar que se instaló drivers para el interfaz con Matlab.
La adquision de datos lo desarrolle utilizando el DAQ de MATLAB, a continuación, definiremos todas las funciones y sus propiedades empleadas.
Interfaz basada en la sesión y Adquisición de Datos:
Data Acquisition Toolbox ™ y el MATLAB ® entorno de cálculo técnico utilizan la interfaz basada en sesión para comunicarse con los dispositivos de National Instruments, DAQ. Puede operar en el primer plano, o en el fondo, donde MATLAB se continúa ejecutando los comandos adicionales en paralelo con el funcionamiento del hardware.
daq. createSession: utilice el objeto de sesión para comunicarse con el NI USB 6210.
s = daq. createSession('ni');
addAnalogInputChannel: Utilice el método addAnalogInputChannel para agregar un canal que recibe las señales analógicas de un dispositivo de National Instrument NI usb6210.
ch=s. addAnalogInputChannel ('coronado','ai0', 'Voltage');
TerminalConfig: Utilice la configuración de terminal para cambiar la configuración de un canal analógico.
ch.InputType='SingleEnded';
startForeground: Utilice la configuración startForeground para iniciar operaciones en primer plano.
[data,timeStamps,triggerTime] = s. startForeground(s);
Nota: Devuelve los datos adquiridos de varias exploraciones y lo guarda en la variable data, marcas de tiempo en relación con el tiempo se activa la operación, y un tiempo de disparo que indica el tiempo absoluto se desencadenó la operación.
lh = s.addlistener('DataAvailable',... @(src,event) plot(event.TimeStamps, event.Data));

12
Desarrollo del algoritmo en Matlab 2015a para un ordenador portátil de sistema win64 bits
Para muestrear la señal se empleó una frecuencia de muestreo de 256Hz durante 8 segundos.
%---------------------------------------------------------------------
------------ % ||| Proyecto UNFV- Interfaz BCI - Herramienta de Medida en tiempo
real ||| %---------------------------------------------------------------------
-------------- %Desarrollado para el proyecto de investigacion de: % "Diseño de un sistema de control de un dispositivo robótico con un % sistema BCI,empleando procesamiento de señales cerebrales" % % BCI:Brain Computer Interfaces
Close all %borra todas las ventanas abiertas
clear all%borra las variales del espacio de trabajo s = daq.createSession('ni');%inicializacion sesion con la finalidad de
realizar la daquision de datos s.Rate = 256;% frecuencia de muestreo=Fs s.DurationInSeconds =8;%definimos el tiempo de sesion ch=s.addAnalogInputChannel('coronado','ai0', 'Voltage');% ch.Range=[-5 5]; ch.Name='CANAL C3' ch.InputType='SingleEnded';%Ajustar en modo referenciado a masa (RSE) %s.NumberOfScans %Numero de exploraciones para la operacion
cuando se inicia sesion ch=s.addAnalogInputChannel('coronado','ai1', 'Voltage'); ch.Range=[-5 5]; ch.Name='CANAL C4' ch.InputType='SingleEnded';%Ajustar en modo referenciado a masa (RSE) ch=s.addAnalogInputChannel('coronado','ai2', 'Voltage'); ch.Range=[-5 5]; ch.Name='CANAL Cz' ch.InputType='SingleEnded';%Ajustar en modo referenciado a masa (RSE) ch=s.addAnalogInputChannel('coronado','ai3', 'Voltage'); ch.Range=[-5 5]; ch.Name='CANAL EOG'
ch.InputType='SingleEnded';%Ajustar en modo referenciado a masa (RSE)
tic %ai = s.inputSingleScan() %leemos las entradas de los canales analogicas
a NI USB 6210 [data,timestamps,triggerTime] = s.startForeground();
%[data,timestamps,triggerTime] = s.startForeground();% startForeground %devuelve los datos de varias exploraciones adquiridos en una matriz
mxn, donde m nuemero de exploracionesy n numero de canales
lh = s.addlistener('DataAvailable',... @(src,event) plot(event.TimeStamps, event.Data));% creamos un
oyente

13
s.NotifyWhenDataAvailableExceeds = 256;% frecuencia con la que el evento
DataAvaialble se dispara por segundo s.startBackground();% la adquision de datos se realiza en el fondo s.IsLogging % ans = true ;esta adquiriendo datos,false=no
adquiere dato s.wait() %s.ScansAcquired delete(lh); s.IsNotifyWhenDataAvailableExceedsAuto = true; lh = s.addlistener('DataAvailable', @stopWhenExceedOneV);%configurar
nuevo oyente para procesar los datos entrantes type('stopWhenExceedOneV.m') %filename='event.Data' %save(filename) s.IsContinuous = true; %signal digital s.startBackground() %s.ScansAcquired%Número de exploraciones obtenida durante la operación %while s.IsRunning %pause(0.01) %fprintf('While loop: Scans acquired = %d\n', s.ScansAcquired) %save('sesion.mat','data') fprintf('Acquisition has terminated with %d scans acquired\n',
s.ScansAcquired); disp('Acquiring data...'); disp('Acquisition complete.'); title('BRAIN UNFV-FIEI-PERÚ','color','red') save('C:\Users\javier\Desktop\BCI
UNFV\SESIONES\EEG\eeg.mat','data')%guadamos los datos adquiridos xlabel('Time (segundos)','color','red'); ylabel('Amplitud','color','red') ylim([-2 5]); Stop = 1; uicontrol('style','pushbutton','String','Start',... 'Callback','Start = 1;'); delete(lh)
set(gca,'YTick',[0 1 2 3 4 5])
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%

14
9.-BIBLIOGRAFIA
"Grupo de robótica, percepción en tiempo real".
Departamento de Informática e Ingeniería de Sistemas de la Universidad Zaragosa_España.
Universidad Tecnológica Nacional Facultad Regional Buenos Aires Secretaría de Ciencia y
Tecnología.
Centro de investigación en sistema BCI (Brain computer interfaces) de la universidad de
Málaga _España.
UNIVERSIDAD DE CHILE FACULTAD DE CIENCIAS FISÍCAS Y MATEMÁTICAS: DEPARTAMENTO DE CIENCIAS
DE LA COMPUTACÍON.
https://www.researchgate.net/publication/259840870_Implementacion_de_Metodos_de_Pro
cesamiento_de_Senales_EEG_para_Aplicaciones_de_Comunicacion_y_Control
PROCESAMIENTO DE SEÑALES EEG PARA APLICACIONES DE COMUNICACIÓN Y CONTROL
(Universidad Peruana Cayetano Heredia)
Autores: Shirley Córdova Villar, William A. Pérez Oviedo y Avid Román González
http://www.shifz.org/brainbay/
ECG CLASSIFICATION USING AMADIFIED KOHONEN/ART NETWORK AND SUB-SAMPLED SIGNAL
IN TIME DOMAIN. (Autor: Saúl de Melo), Universidad Federal de Rio de Janeiro.
RETROALIMENTACION EN EL ENTRENAMIENTO EN EL ENTRENAMIENTO DE UNA INTERFAZ
CEREBRO COMPUTADORA USANDO TECNICAS EN REALIDAD VIRTUAL (Autor: Ricardo Ron
Angevin), ETSI UMA. Universidad de Málaga
http://zaguan.unizar.es/record/9224?ln=es# de la universidad de Zaragoza España
http://es.mathworks.com/help/daq/examples/acquire-continuous-and-background-data-using-ni-devices.html http://www.ncbi.nlm.nih.gov/pubmed/25082789 http://es.mathworks.com/help/daq/examples/getting-started-with-session-based-interface-using-ni-devices.html?prodcode=DA&language=en http://jneuroengrehab.biomedcentral.com/articles/10.1186/1743-0003-11-153 http://psicologiayneurocienciaenespanol.blogspot.com.es/2013/05/neuronas-que-se-mueven-al-ritmo-mu.html http://psicologiayneurocienciaenespanol.blogspot.com.es/2013/05/neuronas-que-se-mueven-al-ritmo-mu_10.html http://www.tsc.uc3m.es/~mlazaro/Docencia/Doctorado/FiltAdapt.html https://hal.archives-ouvertes.fr/hal-00419918/document

15
PARTICIPACION COMO EXPOSITORES EN LA FERIA PERU CON CIENCIA ORGANIZADO POR
CONCYTEC.

16

17
MÁLAGA _ ESPAÑA


















