OS-07

of 32
Transcript of OS-07
-
8/7/2019 OS-07
1/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 1
Process Synchronisation
Background
CriticalSection Problem
Semaphores
Classical Problems of Synchronization
Monitors
-
8/7/2019 OS-07
2/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 2
Background
Cooperating Process
Affects or affected by other processes
executing in the system.
Allowed to share data
through files.
Concurrent access to shared data
may result in data inconsistency.
-
8/7/2019 OS-07
3/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 3
Background
Race Condition
Situation where several processes
access and manipulate shared data concurrently.
Final value of the shared data
depends upon which process finishes last.
Synchronising concurrent processes
prevents race conditions.
-
8/7/2019 OS-07
4/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 4
CriticalSection Problem
Critical Section
Code segment of each process.
Accesses shared data.
When one process is executing in its critical section,no other process is allowed to execute in its critical section.
Execution of critical sections by the processes
is mutually exclusive in time.
-
8/7/2019 OS-07
5/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 5
CriticalSection ProblemProtocol design that the processes use to cooperate.
Requirements for solution to CriticalSection Problem1. Mutual ExclusionIf process Pi is executing in its critical section,
then no other processes can be executing in their critical sections.
2. Progress
If no process is executing in its critical section andthere exist some processes that wish to enter their critical section, then
the selection of the processes that will enter the critical section next
cannot be postponed indefinitely.
3. Bounded WaitingA bound must exist on the no. of times that
other processes are allowed to enter their critical sections
after a process has made a request to enter its critical section and
before that request is granted.
-
8/7/2019 OS-07
6/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 6
CriticalSection Problem
General Structure of a typical process Pi
do {
entry section
critical section
exit section
reminder section
} while (1);
-
8/7/2019 OS-07
7/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 7
CriticalSection Problem
TwoProcess SolutionsO
ne Process PiOther Process Pj
Algorithm 1Shared variables:
int turn = 0;
Structure of Process Pido {
while (turn != i);
critical section
turn = j;
reminder section} while (1);
Satisfies mutual exclusion, but not progress.
-
8/7/2019 OS-07
8/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 8
CriticalSection Problem
Algorithm 2Shared variables
boolean flag[2] = false;
Structure of Process Pido {
flag [i] := true;
while (flag [j]);
critical section
flag [i] = false;
remainder section
} while (1);
Satisfies mutual exclusion, but not progress requirement.
-
8/7/2019 OS-07
9/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 9
CriticalSection Problem
Algorithm 3Combines the key ideas of algorithms 1 and 2.
Shared variables
boolean flag[2] = false;
int turn = 0;
Structure of Process Pi
do {flag [i]:= true;
turn = j;
while (flag [j] && turn == j);
critical section
flag [i] = false;
remainder section
} while (1);
Meets all the requirements
and solves the CriticalSection problem for two processes.
-
8/7/2019 OS-07
10/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 10
CriticalSection Problem
MultipleProcess Solutions Bakery Algorithm
CriticalSection problem for n processes.
Processes enter their critical section on a first-come, first-served basis.
Before entering its critical section, process receives a no.
Holder of the smallest no. enters the critical section.
If processes Piand Pjreceive the same no., ifi< j, then
Piis served first; else
Pjis served first.
The numbering scheme always generatesnos. in increasing order of enumeration.
i.e., 1,2,3,3,3,3,4,5, .
-
8/7/2019 OS-07
11/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 11
Semaphores
Busy waiting / Spinlock
While a process is in its critical section,any other process that tries to enter its critical section
must loop continuously in the entry code.
SemaphoreSynchronization tool that does not require busy waiting.
Semaphore SInteger variable can only be accessed via
two indivisible (atomic) operations:
P (for wait; from the Dutch Proberen, to test)
V (for signal; from the Dutch Verhogen, to increment)
-
8/7/2019 OS-07
12/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 12
Semaphores
Classical definition of wait
wait(S) {while (S e 0)
; //no-op
S--;
}
Classical definition of signalsignal(S) {
S++;
}
-
8/7/2019 OS-07
13/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 13
Semaphores
Deals with Critical Section ofn Processes.
Shared data:
semaphore mutex = 1
Structure of Process Pi:
do {
wait (mutex);critical section
signal (mutex);
remainder section
} while (1);
-
8/7/2019 OS-07
14/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 14
Semaphores
Operations
blocksuspends the process that invokes it.
wakeup(P)
resumes the execution of a blocked process P.
-
8/7/2019 OS-07
15/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 15
Semaphores
Deadlocks and Starvation
DeadlockTwo or more processes waiting indefinitely for an eventthat can be caused by only one of the waiting processes.
Let S and Q be two semaphores initialized to 1.
P0 P1
wait (S); wait (Q);wait (Q); wait (S);
signal (S); signal (Q);
signal (Q) signal (S);
StarvationIndefinite blocking.
A process may never be removed from the semaphore queue
in which it is suspended.
-
8/7/2019 OS-07
16/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 16
Semaphores
Types of Semaphores
Counting Semaphore
Integer value
range over an unrestricted domain.
Binary Semaphore
Integer value
range only between 0 and 1.
Simple to implement.
-
8/7/2019 OS-07
17/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 17
Semaphores
Implementing a Counting semaphore S as a Binary semaphore
Data structures:
binary-semaphore S1, S2;
int C;
Initialization:
S1 = 1S2 = 0
C = initial value of semaphore S
-
8/7/2019 OS-07
18/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 18
Semaphores
Implementing a Counting semaphore S as a Binary semaphore
waitoperation on the counting semaphore S
wait (S1);
C--;
if (C < 0) {signal (S1);
wait (S2);
}
signal (S1);
-
8/7/2019 OS-07
19/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 19
Semaphores
Implementing a Counting semaphore S as a Binary semaphore
Signaloperation on the counting semaphore S
wait (S1);
C++;
if (C
-
8/7/2019 OS-07
20/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 20
Classical Problems of Synchronization
BoundedBuffer Problem
Readers and Writers Problem
DiningPhilosophers Problem
-
8/7/2019 OS-07
21/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 21
Classical Problems of Synchronization
BoundedBuffer Problem
Used to illustrate the power of synchronisation primitives.
Consists of n buffers, each capable of holding one item.
Shared datasemaphore full, empty, mutex;
Initialisation:
full = 0, empty = n, mutex = 1
-
8/7/2019 OS-07
22/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 22
Classical Problems of Synchronization
BoundedBuffer Problem
Structure of Producer Process
Producerproduce full buffers for the Consumer.
do {
produce an item in nextp
wait (empty);
wait (mutex);
add nextp to buffer
signal (mutex);
signal (full);
} while (1);
-
8/7/2019 OS-07
23/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 23
Classical Problems of Synchronization
BoundedBuffer Problem
Structure of Consumer Process
Consumerproduce empty buffers for the Producer.
do {
wait (full)
wait (mutex);
remove an item from buffer to nextc
signal (mutex);
signal (empty);
consume the item in nextc
} while (1);
-
8/7/2019 OS-07
24/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 24
Classical Problems of Synchronization
ReadersWriters Problem
A data object (file or record) shared among several concurrent processes.
Reader processesInterested only reading
the content of the shared object.No adverse effects, if no. of readers access
the shared data simultaneously.
Writer processes
Interested only updating (reading and writing)the content of the shared object.
Each process has exclusive access to
the shared data.
-
8/7/2019 OS-07
25/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 25
Classical Problems of Synchronization
ReadersWriters Problem
Shared data
semaphore mutex, wrt;
Initially mutex = 1, wrt = 1, readcount = 0
Structure of Writer Processwait (wrt);
writing is performed
signal (wrt);
-
8/7/2019 OS-07
26/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 26
Classical Problems of Synchronization
ReadersWriters Problem
Structure of Reader Processwait (mutex);
readcount++;
if (readcount == 1)
wait (wrt);signal (mutex);
reading is performed
wait (mutex);
readcount--;
if (readcount == 0)
signal (wrt);
signal (mutex):
-
8/7/2019 OS-07
27/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 27
Classical Problems of Synchronization
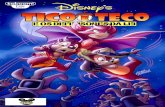
DiningPhilosophers Problem
-
8/7/2019 OS-07
28/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 28
Classical Problems of Synchronization
DiningPhilosophers ProblemShared data
semaphore chopstick[5];
Initially all values are 1.
Structure of Philosopher i:
do {
wait (chopstick[i])
wait (chopstick[(i+1) % 5])
eat
signal (chopstick[i]);
signal (chopstick[(i+1) % 5]);
think
} while (1);
-
8/7/2019 OS-07
29/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 29
Monitors
High-level synchronisation construct.
Characterised by set of programmer-defined operations.
Allows the safe sharing of an abstract data type
among concurrent processes.
-
8/7/2019 OS-07
30/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 30
Monitors
Syntax of a Monitor
monitor monitor-name {
shared variable declarations
procedure body P1 () {
...
}
procedure body P2 () {...
}
procedure body Pn () {
...
}
{
initialization code
}
}
-
8/7/2019 OS-07
31/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 31
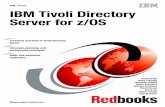
Monitors
Schematic View of a Monitor
-
8/7/2019 OS-07
32/32
Prof. D.S.R. Murthy OS-7 Process Synchronisation 32
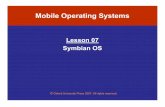
Monitors
Monitor With Condition Variables