MØtodos para la Física. II. Geometría Diferencial · MØtodos para la Física. II. Geometría...
139
MØtodos para la Fsica. II. Geometra Diferencial Antonio HernÆndez Cabrera Pilar Aceituno Cantero Departamento de Fsica BÆsica Universidad de La Laguna 6 de febrero de 2008
Transcript of MØtodos para la Física. II. Geometría Diferencial · MØtodos para la Física. II. Geometría...

Métodos para la Física.II. Geometría Diferencial
Antonio Hernández CabreraPilar Aceituno Cantero
Departamento de Física BásicaUniversidad de La Laguna
6 de febrero de 2008

2
Índice general
I Introducción a la teoría de campos 9
1. Introducción 11
2. ESPACIOS PUNTUALES AFINES V �n (K): 13
2.1. De�nición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2. Sistema de referencia cartesiano en V �
n (K): . . . . . . . . . . . 132.3. Ecuaciones de un Sp� : . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.1. Vectorial: . . . . . . . . . . . . . . . . . . . . . . . . . 162.3.2. Paramétricas: . . . . . . . . . . . . . . . . . . . . . . . 162.3.3. Implícitas: . . . . . . . . . . . . . . . . . . . . . . . . . 17
3. COORDENADAS CURVILÍNEAS EN V n� (R) 19
3.1. De�nición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2. Cambio de sistema curvilíneo. . . . . . . . . . . . . . . . . . . 193.3. Variedades a�nes no lineales
en V n� (R): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4. Super�cies y curvas coordenadas en el EGO. . . . . . . . . . . 22
4. CAMPOS TENSORIALES EN V n� (R). 27
4.1. Campos tensoriales en V n� (R): . . . . . . . . . . . . . . . . . . 27
4.1.1. De�nición: . . . . . . . . . . . . . . . . . . . . . . . . . 284.1.2. Componentes: . . . . . . . . . . . . . . . . . . . . . . . 284.1.3. Propiedades de h1; � � � ; hn : . . . . . . . . . . . . . . . 28
4.2. Símbolos de Christo¤el. . . . . . . . . . . . . . . . . . . . . . . 294.3. Derivación en V n
� (R): . . . . . . . . . . . . . . . . . . . . . . . 304.3.1. Campo derivada covariante T; de T : . . . . . . . . . . 30
3

4 ÍNDICE GENERAL
4.3.2. Campo diferencial de T , dT . . . . . . . . . . . . . . . 314.3.3. Campo derivada intrínseca de T , . . . . . . . . . . . . 314.3.4. Campo derivada parcial de T , �T
�ym, . . . . . . . . . . . 31
4.4. Operadores diferenciales en V n(R): . . . . . . . . . . . . . . . 324.5. Curvas en V n
� (R): . . . . . . . . . . . . . . . . . . . . . . . . . 33
5. ESPACIOS PUNTUALES EUCLÍDEOS. CAMPOS TEN-SORIALES 375.1. De�nición de En� . Metrización. . . . . . . . . . . . . . . . . . . 375.2. Campos tensoriales en En� . . . . . . . . . . . . . . . . . . . . . 385.3. Símbolos de Christo¤el en En� . . . . . . . . . . . . . . . . . . 395.4. Volumen elemental en un En� : . . . . . . . . . . . . . . . . . . 405.5. Derivada direccional de un campo tensorial T: . . . . . . . . . 42
6. OPERADORES DIFERENCIALES EN En 436.1. Operadores de primer orden. . . . . . . . . . . . . . . . . . . . 43
6.1.1. Campo escalar U2 C1 . . . . . . . . . . . . . . . . . . 436.1.2. Campo vectorial f 2 C1 y campos tensoriales en general. 43
6.2. Operadores de segundo orden. . . . . . . . . . . . . . . . . . . 456.2.1. Campos escalares U 2 C2. Laplaciana. . . . . . . . . . 456.2.2. Para campos vectoriales f 2 C2: Laplaciana. . . . . . . 45
6.3. Super�cies de nivel y lineas de campo. . . . . . . . . . . . . . 466.3.1. Super�cies de nivel de U . . . . . . . . . . . . . . . . . . 476.3.2. Lineas de campo de un f . . . . . . . . . . . . . . . . . 47
6.4. Operadores de campos compuestosU:V; f � g; Uf; f � g: . . . . . . . . . . . . . . . . . . . . . . 48
6.5. Propiedades geométricas de grad U . . . . . . . . . . . . . . . . 49
7. Campos especiales en En� : 517.0.1. A) Para campos escalares . . . . . . . . . . . . . . . . 517.0.2. B) Para campos vectoriales y, en su caso, tensoriales: . 51
8. CIRCULACIÓN DE UN CAMPO VECTORIAL f . FLU-JO. 558.1. Circulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 558.2. Flujo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
ÍNDICE GENERAL 5
9. TEOREMAS INTEGRALES 619.1. Teorema de Stokes en el EGO . . . . . . . . . . . . . . . . . . 61
9.1.1. Fórmula matemática de Stokes en el EGO . . . . . . . 619.1.2. Interpretación vectorial. . . . . . . . . . . . . . . . . . 62
9.2. Teorema de Stokes en el plano. Fórmula matemática de Rie-
mann. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 639.2.1. Interpretación vectorial de la fórmula de Riemann. . . 63
9.3. Teorema de la divergencia en EGO. . . . . . . . . . . . . . . . 649.3.1. Fórmula de Ostrogradsky en el EGO. . . . . . . . . . . 649.3.2. Teorema de la divergencia. Forma integral vectorial. . . 659.3.3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
9.4. Teorema de la divergencia en el plano. . . . . . . . . . . . . . 659.5. Fórmula de Ostrogradsky en el plano. . . . . . . . . . . . . . . 65
9.5.1. Teorema de la divergencia. expresión integral de la fór-
mula de Ostrogradsky en el plano. . . . . . . . . . . . . 669.5.2. Teorema del gradiente.Teoremas que se deducen a par-
tir del teorema de la divergencia. . . . . . . . . . . . . 669.5.3. Teorema del rotacional. . . . . . . . . . . . . . . . . . . 679.5.4. Teorema de la laplaciana. . . . . . . . . . . . . . . . . 67
9.6. Expresión intrínseca de los operadores diferenciales. . . . . . . 67
10.CAMPOS CONSERVATIVOS 6910.1. De�nición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6910.2. Circulación de un campo irrotacional. . . . . . . . . . . . . . . 72
10.2.1. Punto sigular aislado P . . . . . . . . . . . . . . . . . . 7210.2.2. Linea de puntos singulares cerrada o inde�nida por am-
bos extremos: linea stokiana L . . . . . . . . . . . . . . 72
11. CAMPOS SOLENOIDALES. DISCONTINUIDADES 75
11.1. De�nición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7511.2. Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7511.3. Potencial vectorial de un campo . . . . . . . . . . . . . . . . . 7611.4. Flujo de un campo solenoidal. . . . . . . . . . . . . . . . . . . 7811.5. Ángulos sólidos. . . . . . . . . . . . . . . . . . . . . . . . . . . 80
6 ÍNDICE GENERAL
12.CAMPOS CENTRALES 8512.1. De�nición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8512.2. Expresión general para campos centrales armónicos. . . . . . . 85
12.2.1. Para un escalar U(r); . . . . . . . . . . . . . . . . . . . 8512.2.2. Para un campo vectorial f . . . . . . . . . . . . . . . . 86
13.DESCOMPOSICIÓN DE HELMHOLTZ. 8913.1. Teorema de la decomposición de Helmholtz. . . . . . . . . . . 8913.2. Ecuación de Poisson . . . . . . . . . . . . . . . . . . . . . . . 8913.3. Ecuación de Laplace . . . . . . . . . . . . . . . . . . . . . . . 90
14.ESPACIOS DE RIEMANN 9114.1. Variedad real n-dimensional y p-diferenciable V p
n�. . . . . . . . 9114.2. Espacio de Riemann R�n de dimensión n . . . . . . . . . . . . . 91
14.2.1. Axiomas: . . . . . . . . . . . . . . . . . . . . . . . . . 92
14.2.2. Puntos singulares: . . . . . . . . . . . . . . . . . . . . . 92
14.3. CLASIFICACIÓN DE R�n . . . . . . . . . . . . . . . . . . . . 92
14.3.1. Cambio de los coe�cientes de la forma cuadrática (ds)2; g��; 93
14.4. Ejemplo fundamental de R�n. . . . . . . . . . . . . . . . . . . . 9314.5. Curva y longitud de un arco de curva en R�n. . . . . . . . . . . 9414.6. Símbolos de Christo¤el en R�n. . . . . . . . . . . . . . . . . . . 9514.7. Cambio de sistema curvilíneo y símbolos de Christo¤el. . . . . 9514.8. Espacio de Riemann R�n, métricamente aplicable sobre un En� : 9514.9. Geodésicas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
15.CAMPOS TENSORIALES RC, RI y EI. 9915.1. Campo tensorial de Riemann-Christo¤el. . . . . . . . . . . . . 9915.2. Simetrías y hemisimetrías de R� C: . . . . . . . . . . . . . . 10015.3. Campo tensorial de Ricci. . . . . . . . . . . . . . . . . . . . . 10115.4. Componentes de la curvatura escalar R. . . . . . . . . . . . . 10215.5. Campo tensorial de Einstein. . . . . . . . . . . . . . . . . . . . 10215.6. Campo tensorial de Weyl. . . . . . . . . . . . . . . . . . . . . 10315.7. Identidades de Bianchi. . . . . . . . . . . . . . . . . . . . . . . 10315.8. Ecuación de Einstein. . . . . . . . . . . . . . . . . . . . . . . . 103
ÍNDICE GENERAL 7
II Teoría General de la Relatividad 105
16.RELATIVIDAD GENERAL 107
16.1. Principio de equivalencia. . . . . . . . . . . . . . . . . . . . . . 10716.2. Métrica debida a un campo débil: el campo gravitatorio. . . . 10816.3. Movimiento de una partícula libre en un campo gravitatorio. . 10916.4. Ley de Einstein de la gravitación. . . . . . . . . . . . . . . . . 11016.5. Aceleración de una partícula en un campo gravitatorio débil. . 11116.6. Ley de gravitación de Newton. . . . . . . . . . . . . . . . . . . 11316.7. Nube de polvo en caida libre. . . . . . . . . . . . . . . . . . . 11416.8. Métricas con simetría esférica. . . . . . . . . . . . . . . . . . . 11516.9. La solución de Schwarzschild. . . . . . . . . . . . . . . . . . . 11716.10.Las órbitas planetarias. El caso de Mercurio. . . . . . . . . . . 11916.11.Desviación de un rayo de luz debida a la gravedad. . . . . . . 12316.12.Agujeros negros. Ondas gravitatorias. . . . . . . . . . . . . . . 12616.13.Principio cosmológico. Tiempo cosmológico. . . . . . . . . . . 13116.14.Espacios de curvatura constante. . . . . . . . . . . . . . . . . 132
III Bibliografía 137

8 ÍNDICE GENERAL
Parte I
Introducción a la teoría decampos
9


Capítulo 1
Introducción
Nos ha parecido conveniente darle este nombre a la segunda entrega de lacolección de notas de la asignatura Métodos para la Física por una sencillarazón. Al dotar a los espacios vectoriales (euclídeos, seudoeuclídeos o total-mente arbitrarios) de estructura, la mayoría de las cantidades que aparecen enel mercado de la geometría ( y, por tanto, de la física) van a tomar diferentesvalores al cambiar de un punto a otro de un espacio, aunque mantengan suforma analítica inalterada. El conjunto in�nito de valores posibles que puedetomar una entidad es lo que con�gura un campo. El término es muy sug-estivo en el mundo de la física. Desde un punto de vista histórico ya fuéacuñado en el siglo XIX, en particular por J. C. Maxwell. En el siglo XX sedifundió por medio de la Relatividad General. Recordemos que, para Ein-stein, el Universo tenía estructura real en sí mismo. Y los campos también.La Mecánica Cuántica Relativista va hasta tal punto que una partícula, co-mo pueda ser el electrón, no es más que un paquete de energía y momentode un campo. Claro es que no está dentro de las ambiciones de estos apuntesel adentrarse en la Teoría Cuántica de Campos, ni presentar el Modelo Es-tándar u otras teologías contemporáneas. Toda nuestra pretensión es la deproporcionar ciertos conocimientos de las herramientas imprescindibles parapoder abordar problemas de la física actual, así como intentar que el estu-diante adquiera cierta habilidad en su manejo. Desde este punto de vista eltítulo puede ser engañoso, ya que el contenido de estos apuntes sólo son unacontinuación del cálculo tensorial y nada más.Como aplicación de interés haremos una breve introducción a la Relativi-
dad General, tratando de seguir el proceso intelectual que, nos gustaría creer,siguió Einstein. Pero nos servirá para comprobar cómo una teoría matemáti-
11
12 CAPÍTULO 1. INTRODUCCIÓN
ca, en principio sin utilidad aparente alguna, encuentra múltiples aplicacionesen el mundo de la Física. Es el reverso de la pedagogía, donde múltiplesteorías de aplicación práctica inmediata no sirven absolutamente para nadaen el mejor de los casos. Los estudiantes que no sigan la especialidad de As-trofísica tendrán la oportunidad de adquirir ciertas nociones de Cosmología,aunque estas sean .epiteliales". Esperemos que le sean de utilidad cuando al-gún indiscreto curioso les aborde con alguna duda encontrada en libros de"divulgación"tales como los de S. Hawking o de S. Weinberg. Por supuesto,sólo les servirá de forma parcial, pues sospecho que, a menudo, ni los propiosautores están seguros de lo que pretenden divulgar. Pero, con la Teoría deGrupos Contínuos, que también entra en el temario de esta asignatura, elestudiante podrá rellenar algún que otro vacio al respecto. Recordemos quela Mecánica Cuántica, la Relatividad General y las Simetrías son, proba-blemente, las contribuciones más importantes en el siglo XX a la insaciablenecesidad de una pequeñísima parte de la humanidad por conocer cómo fun-ciona físicamente este mundo ya sea material o espiritual.Así, empezaremos por dotar a esas enteléquias matemáticas llamadas es-
pacios vectoriales de cierta estructura que, de alguna manera, nos permitahacer representaciones "visuales".
Capítulo 2
ESPACIOS PUNTUALESAFINES V �n (K):
2.1. De�nición
Un espacio puntual afín V �n (K); de un espacio vectorial asociado V
n(K)es un conjunto de unos elementos denominados puntos, X, de tal formaque existe una aplicación por la que, a cada vector x 2 V n, le correspondebiunívocamente un par de puntos X; Y 2 V �
n , de forma que x = XY : Es,por tanto, una aplicación V �
n (K)� V �n (K)! V n(K). Es decir, con la ayuda
de los puntos es posible construir vectores ligados, los cuales satisfacen lasrelaciones siguientes:1) 8(X;Y ) 2 V �
n ) XY = �Y X2) 8(X;Y; Z) 2 V �
n ) XY + Y Z = XZ3) Fijado un O 2 V �
n , arbitario, 8X 2 V �n ) 9x 2 V n, siendo este vector
único, y tal que OX = x: A este punto O se le denomina origen.Es importante observar que la construcción de los espacios puntuales nos vaa permitir representar vectores.
2.2. Sistema de referencia cartesiano en V �n (K):
1) Se de�ne como sistema de referencia al conjunto de un punto arbitrariode V �
n (K) y una base de Vn, fO; eig. Al punto O se le denomina origen y a
la base ei, base asociada.
13
14 CAPÍTULO 2. ESPACIOS PUNTUALES AFINES V �N(K):
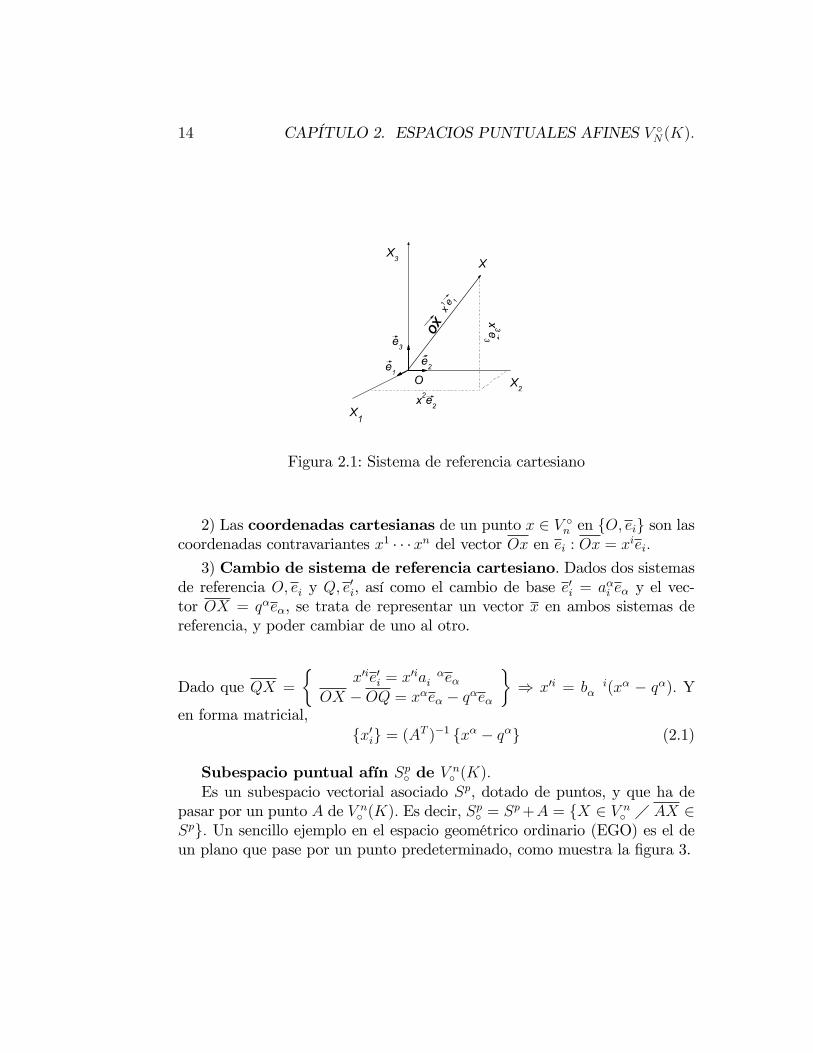
Figura 2.1: Sistema de referencia cartesiano
2) Las coordenadas cartesianas de un punto x 2 V �n en fO; eig son las
coordenadas contravariantes x1 � � �xn del vector Ox en ei : Ox = xiei:
3) Cambio de sistema de referencia cartesiano. Dados dos sistemasde referencia O; ei y Q; e
0i, así como el cambio de base e
0i = a�i e� y el vec-
tor OX = q�e�, se trata de representar un vector x en ambos sistemas dereferencia, y poder cambiar de uno al otro.
Dado que QX =
�x0ie0i = x0ia �
i e�OX �OQ = x�e� � q�e�
�) x0i = b i
� (x� � q�): Y
en forma matricial,fx0ig = (AT )�1 fx� � q�g (2.1)
Subespacio puntual afín Sp� de Vn� (K):
Es un subespacio vectorial asociado Sp, dotado de puntos, y que ha depasar por un punto A de V n
� (K): Es decir, Sp� = Sp+A = fX 2 V n
� � AX 2Spg: Un sencillo ejemplo en el espacio geométrico ordinario (EGO) es el deun plano que pase por un punto predeterminado, como muestra la �gura 3.
2.2. SISTEMA DE REFERENCIA CARTESIANO EN V �N(K): 15
Figura 2.2: Cambio de sistema de referencia cartesiano
Figura 2.3: Subespacio vectorial

16 CAPÍTULO 2. ESPACIOS PUNTUALES AFINES V �N(K):
Como consecuencia de ello:-Un Sp� es un subespacio puntual afín.-Un V n
� es un subespacio puntual afín de sí mismo.-Si B 2 Sp + A) Sp + A � Sp +B.-Una recta en V n
� es todo S1� .
-Un hiperplano en V n� es todo S
n�1� .
- Dos subespacios a�nes se llaman paralelos si los subespacios vectorialesasociados son de tal forma que uno es subespacio del otro.
2.3. Ecuaciones de un Sp�:
Sea el Sp� = A + Sp. Sea una base ei 2 V n y v1; � � � ; vn una base deSp� v� = v i
� ei: Las ecuaciones del Sp� pueden escribirse de varias formas:
2.3.1. Vectorial:
8x 2 Sp ) x = u�v� = u�v i� ei: La ecuación de Sp� en el sistema de
referencia fO; eig será:
8x 2 Sp� ) AX = u�v�: (2.2)
Como OX = OA+ u�v i� ei ) OX = (ai + u�v i
� )ei.
2.3.2. Paramétricas:
xi = ai + u�v i� , donde el número de parámetros es igual a dimSp: La
ecuación en paramétricas se escribe eliminendo las ai:Ejemplo:
Supongamos que obtenemos, el el EGO, el sistemax1 = 3 + 4u1
x2 = 1� u1 + u2
x3 = u1, donde el número de parámetros u� es dos, es decir, esta-
mos trabajando con un plano de un espacio tridimensional. Aquí las ai quede�nen al punto A son las constantes (3,1,0). Por lo tanto, la ecuación del
S2� será
8<:x1 = 4u1
x2 = �u1 + u2
x3 = u1

2.3. ECUACIONES DE UN SP� : 17
Es importante recordar que � 2 Ip pero i 2 In::
2.3.3. Implícitas:
En Sp, se obtienen eliminando los parámetros u� en las ecuaciones paramétri-cas, obteniéndose que:ai jx
j = 0, donde i 2 Im; j 2 In: Aquí, n � rango(ai j) = dimSp. En Sp� ,
tedríamos que xi � ai = u�v i� . Eliminando los parámetros, ai j(x
j � aj) =0) ai jx
j = bi. La dimSp� = n� rango(ai j).Ejemplo:
En el EGO, supongamos la recta (S1�) de�nida por:�3x� y � 7 = 1x+ 2y = 2
�)en S1 )
�3x� y � 7 = 0x+ 2y = 0
�, o, en forma de vector,
[4;�1; 7].
18 CAPÍTULO 2. ESPACIOS PUNTUALES AFINES V �N(K):

Capítulo 3
COORDENADASCURVILÍNEAS EN V n� (R)
3.1. De�nición.
Es un conjunto de n variables y1; � � � ; yn de V n� (R), tales que:
1) y1; � � � ; yn se pueden poner en correspondencia biunívoca con los puntosX 2 V n
� :2) Fijando un sistema de referencia fO; eig, dado que existe el punto X decoordenadas cartesianas x1; � � � ; xn ) 9xi = xi(yj), relaciones que han decumplir las siguientes propiedades:A: Deben ser continuas y derivables dos veces (2 C2).B: @x
i
@yj6= 0;1:
3.2. Cambio de sistema curvilíneo.
Si tenemos dos sistemas curvilíneos diferentes, y1; � � � ; yn e y0i; � � � ; y0n,ambos capaces de representar un punto X, siempre existe una relación entreambos yi = yi(y0j). Si de�nimos la matriz jacobiana de esta relación como
J =
�@yj
@y0i
�, con
i = filaj = columna
)
J�1 =
�@y0i
@yj
�) @yj
@y0i� @y
0i
@yk= �jk ) JJ�1 = I (3.1)
19

20 CAPÍTULO 3. COORDENADAS CURVILÍNEAS EN V N� (R)
Figura 3.1: Coordenadas cilíndricas
Esta matriz jacobiana será la matriz de cambio de base entre los dos sistemascurvilíneos.
Ejemplo: Paso de cartesianas a cilíndricas en el EGO:Las coordenadas cilíndricas habituales son (�; �; z), relacionadas con las carte-sianas mediante:x = � cos �y = � sin �z = z
Vamos a ver si esta relación es válida en todo el EGO. Las coordenadascilíndricas varían 0 � � <1, 0 � � < 2� y �1 < z <1. Geométricamente,existe una relación biunívoca en todo el EGO entre cartesianas y cilíndricas,excepto en el eje Z. Además, existen unas relaciones funcionales que soncontínuas y derivables dos veces en todo el EGO. Es decir, yi = yi(y0j) 2 C2.El jacobiano, donde consideramos a las coordenadas cartesianas como sistemacurvilíneo original, será:

3.3. VARIEDADES AFINES NO LINEALES EN V N� (R): 21
J =
0@ cos � sin � 0�� sin � � cos � 00 0 1
1A) jJ j = � (6= 0;1):
Es decir, el sistema (�; �; z) es curvilíneo en todo el EGO, excepto en el ejeZ.
El dominio de regularidad de un sistema curvilíneo (y1; � � � ; yn) es el lugargeométrico de los puntos donde el sistema es realmente curvilíneo. Para lascilíndricas en el EGO, la región de regularidad será D��z = EGO � ejeZ.
3.3. Variedades a�nes no linealesen V n
� (R):
Una variedad afín no lineal Sp�NL es un subconjunto de puntos de Vn� (R)
tales que, �jado un sistema y1; � � � ; yn, las coordenadas de los puntos son fun-ciones casi contínuas de p variables reales u1; � � � ; up, es decir, yi = yi(u1; � � � ; up),con p < n.
Ejemplo:Retomando el sistema curvilíneo, donde y1; y2; y3 = �; �; z, una variedad afín
no lineal de orden 2, S2�NL , podría ser
8<:� = u1
� = u2
z = (u1)2
que es un paraboloide de sección circular como el representado en la �gura5. (Por cierto, la �gura utiliza otra variedad afín no lineal para hacer larepresentación, y que viene prediseñada por el software usado).
Una variedad afín no lineal es siempre un subespacio puntual afín. Lasecuaciones de la variedad afín en un sistema cartesiano x1; � � � ; xn son fun-ciones a�nes de p variables reales.
Ejemplo:Tengamos en el EGO, en un sistema de referencia fO; eig, la variedad
afín de�nida por
8<:x = 3u1 + u2 � 1
y = u1 � 2z = u1 + u2
, que es un plano.

22 CAPÍTULO 3. COORDENADAS CURVILÍNEAS EN V N� (R)
Figura 3.2: Paraboloide circular
Dos casos particulares de variedades a�nes con nombres propios son losde dimensiones n� 1 y 1:Una hipersuper�cie en V n
� (R) es una Sn�1�NL .
Una curva en V n� (R) es una S
1�NL :
3.4. Super�cies y curvas coordenadas en elEGO.
(De�nición de super�cies y curvas coordenadas en elEGO, relativas a un sistema curvilíneo).1) Se llama familia de super�cies coordenadas, relativas al sistena y1; y2; y3,
a las familias:
SCy1 �
8<:y1 = ky2 = uy3 = v
; SCy2 �
8<:y1 = uy2 = ky3 = v
; SCy3 �
8<:y1 = uy2 = vy3 = k
, siendo
k el parámetro que identi�ca cada super�cie, o elemento de la familia. Endimensiones mayores existen la familias de hipersuper�cies coordenadas. Uncaso típico corresponde al de los universos relativistas con simetría esféricaen n = 4.En el ejemplo de las coordenadas cilíndricas que hemos ido analizando,
las familias de super�cies coordenadas serían:

3.4. SUPERFICIES Y CURVAS COORDENADAS EN EL EGO. 23
Z
YX
S Cρ
S Cθ
S C z
Figura 3.3: Curvas coordenadas en cilíndricas
SC� =
8<:� = k� = uz = v
; SC� =
8<:� = u� = kz = v
; SCz =
8<:� = u� = vz = k
:
:
SC� es una familia de hojas cilíndricas concentricas. SC� es la familia deplanos que pasan por el eje Z. Por último, SCz es la familia de planosparalelos al XY .
2) Las curvas coordenadas son las familias de curvas tales que:
CCy1 �
8<:y1 = uy2 = k1y3 = k2
;
CCy2 �
8<:y1 = k1y2 = uy3 = k2
;

24 CAPÍTULO 3. COORDENADAS CURVILÍNEAS EN V N� (R)
Z
YX
CC ρ
CC θ
CC z
Figura 3.4: Curvas coordenadas en cilíndricas
CCy3 �
8<:y1 = k1y2 = k2y3 = u
; k1; k2 son los parámetros que identi�can a cada
curva.Para las coordenadas cilíndricas tendríamos:
CC� �
8<:� = u� = k1z = k2
; CCy2 �
8<:� = k1� = uz = k2
; CCy3 �
8<:� = k1� = k2z = u
:CC� � CCy1 son semirectas paralelas al plano XY . CCy2 son circunfer-encias concéntricas paralelas al plano XY . CCy3 son rectas paralelas al ejeZ:
Cada familia de curvas coordenadas, relativa a una variable, es la inter-seción de las super�cies coordenadas relativas a las otras variables
TEOREMA:

3.4. SUPERFICIES Y CURVAS COORDENADAS EN EL EGO. 25
Un sistema yi de coordenadas curvilíneas en V n� (R) es cartesiano si, y
sólo si, �jado un xi cartesiano, las relaciones xi = xi(yj) son a�nes, es decir,lineales con un término independiente.

26 CAPÍTULO 3. COORDENADAS CURVILÍNEAS EN V N� (R)
Capítulo 4
CAMPOS TENSORIALES ENV n� (R).
SÍMBOLOS DE CHRISTOFFEL.
4.1. Campos tensoriales en V n� (R):
Es un conjunto de tensores del V n(R) asociado, todos de igual orden,peso y especie, de los cuales uno, y sólo uno, corresponde a cada punto deV n� (R): Es decir, las componentes de los tensores son funciones de los puntos.Un ejemplo sencillo en el EGO es el tensor T = ti j(ei e�j), de componentes
ti j =
0@ x xz 40 0 y0 y2 0
1A)
T = x(e1 e�1) + xz(e1 e�2) + 4(e1 e�3) + y(e2 e�3) + y2(e3 e�2):
Se llama campo vectorial f al campo tensorial de orden uno, contravari-ante, homogéneo.Un campo escalar es un campo tensorial de orden cero.El campo de vectores de posición r, con origen en O, es el campo de�nidopor los vectores r(x) = OX.
Se de�ne como Derivada parcial de un campo tensorial T , de V n� en
un sistema yi, a un nuevo campo tensorial @T@yl
que, en cada base ei, tiene
27

28 CAPÍTULO 4. CAMPOS TENSORIALES EN V N� (R).
por sistema de componentes las derivadas de las componentes de T en ei: Engeneral, @T
@yltiene la misma naturaleza tensorial que T .
Campos vectoriales naturales h1; � � � ; hn, relativos a un sistema curvilí-neo y1; :::; yn en V n
� (R):
4.1.1. De�nición:
Son los n campos vectoriales hi = @r@yi, donde r es el campo de vectores de
posición con origen en O.
4.1.2. Componentes:
hi =@OX@yi
= @(xiei)@yj
= @xi
@yjei. En forma matricial,�
hi= J fe�g (4.1)
Ejemplo:Para las coordenadas cilíndricas en el EGO,8<:
h�h�hz
9=; =
0@ cos � sin � 0�� sin � � cos � 00 0 1
1A8<:e1e2e3
9=;.
4.1.3. Propiedades de h1; � � � ; hn :a) Son independientes del origen elegido, O. Supongamos que de�nimos losvectores de posición respecto a dos orígenes diferentes O; bO, ro y rbo, respec-tivamente, de forma que bOX = OX�O bO. Los campos vectoriales naturales,respecto a los dos orígenes, serían:hi =
@ro@yi= @OX
@yi:bhi = @rbo
@yi= @ bOX
@yi= @(OX�O bO)
@yi= @OX
@yi= hi.
b) En la región de regularidad Dyi, los h1; � � � ; hn son campos de la clase C1,por ser x� = x�(yi) de la clase C2:
4.2. SÍMBOLOS DE CHRISTOFFEL. 29
hθ
hρ
hz
Z
YX
hρ
hz
hθ
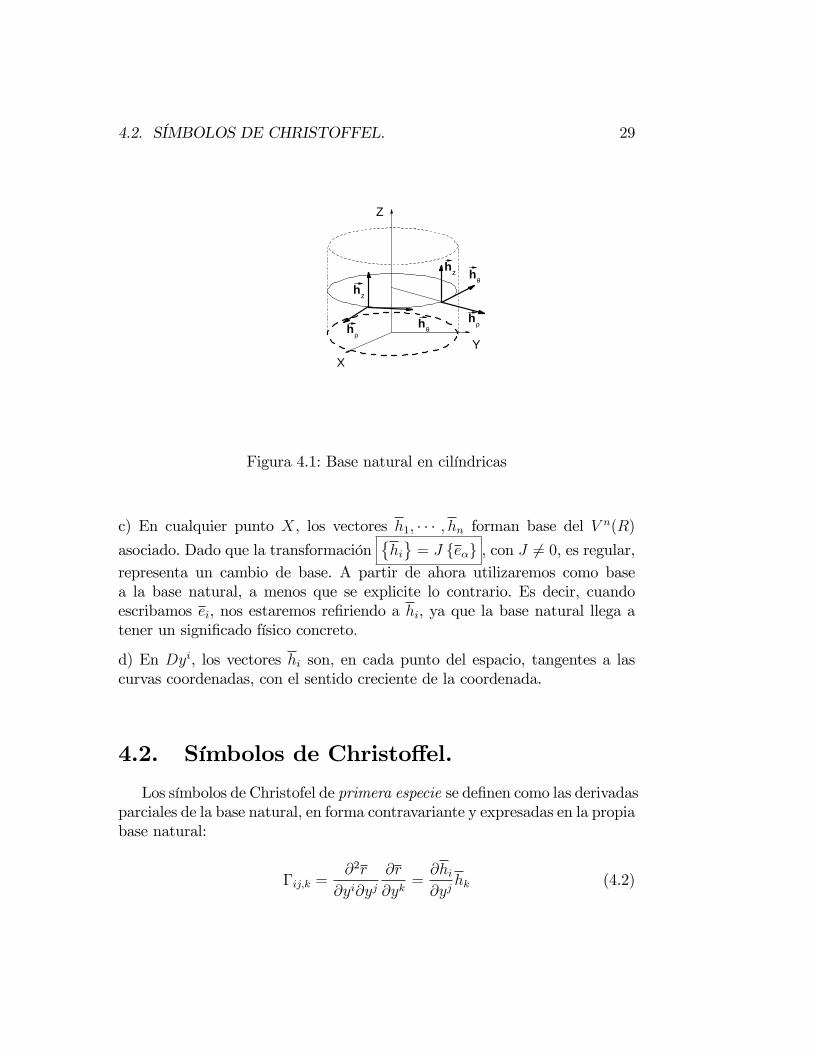
Figura 4.1: Base natural en cilíndricas
c) En cualquier punto X, los vectores h1; � � � ; hn forman base del V n(R)
asociado. Dado que la transformación�hi= J fe�g , con J 6= 0, es regular,
representa un cambio de base. A partir de ahora utilizaremos como basea la base natural, a menos que se explicite lo contrario. Es decir, cuandoescribamos ei, nos estaremos re�riendo a hi, ya que la base natural llega atener un signi�cado físico concreto:
d) En Dyi, los vectores hi son, en cada punto del espacio, tangentes a lascurvas coordenadas, con el sentido creciente de la coordenada.
4.2. Símbolos de Christo¤el.
Los símbolos de Christofel de primera especie se de�nen como las derivadasparciales de la base natural, en forma contravariante y expresadas en la propiabase natural:
�ij;k =@2r
@yi@yj@r
@yk=@hi@yj
hk (4.2)

30 CAPÍTULO 4. CAMPOS TENSORIALES EN V N� (R).
Los símbolos de Christo¤el de segunda especie serían la forma covariante delas anteriores derivadas:
� kij =
@hi@yj
hk
(4.3)
Los símbolos de Christo¤el son simétricos, por construcción, respecto a losdos primeros subíndices, tanto los de primera como los de segunda especie.
4.3. Derivación en V n� (R):
(Campos derivada covariante, diferencial, derivada in-trínseca y derivada parcial de un campo tensorial de�nidoen V n
� (R)):Sea un campo T modular de peso p, cova-contra-covariante, por ejemplo.
Lo escogemos modular para tener un caso lo más general posible. Dichocampo tendrá por componentes:
T
8><>:en la base natural ei : t
ji k(X)
en otra base natural e0i : t0 ji k(X)
en cartesianas�ei :
�t
j
i k(X)
4.3.1. Campo derivada covariante T; de T :
Es el campo que tiene por componentes, en ei,
tjik;l = Dltjik =
@tijk
@yl� tj�k�
�il + t�ik�
j�l � tji��
�kl � ptji k�
��l (4.4)
Dado que, en cartesianas, los símbolos de Christo¤el son nulos, es fácil ver
que�t
j
i k;l =@�t
j
i k
@yl:
Si cambiáramos de sistema de referencia curvilíneo, se puede comprobar, deforma bastante tediosa, que:t0 ji k;l = jJ j
p @y�
@y0i@y0j
@y�@y
@y0k@y�
@y0l t�
� ;�:Es decir, son las componentes de un campo tensorial de análoga naturalezaa T , pero con una covarianza mas.

4.3. DERIVACIÓN EN V N� (R): 31
4.3.2. Campo diferencial de T , dT
Es el campo que tiene por componentes, en ei,
Dt ji k = t j
i k;ldyl (4.5)
En cartesianas, D�t
j
i k = d�t
j
i k. Es decir, las diferenciales absolutas coincidencon las ordinarias en los sistemas cartesianos.Dado que dr = dyiei = dxi
�ei ) dT =
= T; dr = Cp+1;p+2[T;dr], para un tensor de orden p; dT tiene la mismanaturaleza tensorial que T:
4.3.3. Campo derivada intrínseca de T ,
respecto de un parámetro � de una curva de�nida por C � fyi = yi(�)g,�T��, Es el campo que tiene por componentes, en ei,
�t ji k
��= (t j
i k;l)Cdyl
d�, que
vienen a correspoder con las derivadas intrínsecas de las componentes t ji k
respecto a �: Lógicamente, en cartesianas, ��t
j
i k
��=
�d�t
j
i k
d�
�C
:
�T��tiene idéntica naturaleza tensorial que T , pero sólo en los puntos de la
curva C.
4.3.4. Campo derivada parcial de T , �T�ym ,
respecto a una coordenada curvilínea ym, donde m es �jo, es el tensor �T�ym
que tiene por componentes en una base ei a
t ji k;m =
@t ji k
@ym� t j
� k��
im + t �i k�j
�m � t ji ��
�km � pt j
i k��
�m ; (4.6)
donde m sólo toma un valor. En cartesianas,�t
j
i k;m =@�t
j
i k
@ym. Es fácil com-
probar que �T�ym
tiene la misma naturaleza tensorial que T .

32 CAPÍTULO 4. CAMPOS TENSORIALES EN V N� (R).
4.4. Operadores diferenciales en V n(R):
1) Para un campo escalar U (campo tensorial de orden cero) tenemos:( Grad U = U; que es un campo tensorial de primer orden, homogéneo,covariante, de componentes
Grad U = U;i e�i =
@U
@yie�i (4.7)
Ejemplo:Retomando las coordenadas cilíndricas yi, supongamos que tenemos un cam-po escalar U = �2x cos �. Su gradiente sería:Grad U = @U
@yie�i = 2�z cos � e�� � �2z sin � e�� + �2 cos � e�z
2) Para un campo vectorial f (tensor de primer orden, homogéneo, contravari-ante):( Grad f = f; tensor de segundo orden, homogéneo, contra-covariante, decomponentes:
f;= f i;j (ei e�j) =
�@f i
@yj+ f�� i
�j
�(ei e�j) (4.8)
div f = C[f; ] = f i;i=@f i
@yi+ f�� i
�i ; (4.9)
que es un campo escalar.
3) Para campos de funciones lineales T (tensores de primer orden, homogé-neos, covariantes):( Grad T = T;= ti;j(e
�ie�j), campo tensorial de 2oorden, cova-covariante,homogéneo.( R(T ) = campo rotacional o de Stokes =
T c;�T;= (tj;i � ti;j)(e�i e�j) = (
@tj@yi
� @ti@yj
)(e�i e�j) (4.10)

4.5. CURVAS EN V N� (R): 33
4.5. Curvas en V n� (R):
1) Campo vectorial tangente a una curva con parámetro dado �Sea la curva Cfyi = yi(�)g. Se de�ne como tangente a dicha curva, conparámetro �, a:
t� =�r
��=dyi
d�ei (4.11)
(recordemos que ya ei � hi).Si de�niéramos la curva por medio de otro parámetro �0, la tangente sólo
sufre una variación de tamaño, pero no de dirección. Si �0 = �0(�), entoces:t�0 =
�r��0 =
dyi
d�0 ei =dyi
d�� d�d�0 ei =
d�d�0 � t�.
Ejemplo:Tengamos, en el EGO, la curva de�nida por las curvas coordenadas de ciertas
coordenadas curvilíneas yi, CCy2 �
8<:y1 = k1y2 = y2 = �y3 = k2
9=;)
t2 =dyi
d�ei =
dyi
dy2ei = � i
2 ei = e2.
2) Derivada de la tangente
�t���
=�2r
��2=
�d2yi
d�2+dyj
d�
dyk
d�
�� ijk
�C
�ei (4.12)
En efecto, �t���= (ti;j )C
dyi
d�ei =�
dti
dyj+ t��� � i�j
�C
dyi
d�ei =�
d2yi
d�2+ dy�
d�dyj
d�
�� i�j
�C
�ei.
Dado que la derivada parcial y la intrínseca son similares en forma, existeotra forma de plantear la derivada de la tangente:�t���= d2yk
d�2ek +
dyi
d�@ei@yj
dyj
d�.
Dado que @ei@yj= � k
ij ek ) �t���= d2yk
d�2ek +
dyi
d�� kij ek
dyj
d�=�
d2yk
d�2+ dyi
d�dyj
d�� kij
�ek.
3) Dado un móvil que se desplaza por una curva Cfyi = yi(�)g, conley horaria, y con � = �(t), podemos representar la curva eligiendo comoparámetro al tiempo t. En tal caso podemos de�nir:Velocidad:

34 CAPÍTULO 4. CAMPOS TENSORIALES EN V N� (R).
v = tt =�r
��=dyi
dtei (4.13)
Aceleración:
a =�2r
�t2=
�d2yi
dt2+dyj
dt
dyk
dt
�� ijk
�C
�ei (4.14)
Más adelante veremos las profundas implicaciones que tiene esta expresiónde la aceleración, en particular en la Teoría de Relatividad General.
Problema 33.Dadas las coordenadas esféricas en el EGO, buscar las relaciones fun-
cionales de estas coordenadas con las cilíndricas y las cartesianas. Buscar laregión de regularidad de las esféricas. Buscar la base natural de las coorde-nadas esféricas en función de las bases naturales de cilíndricas y cartesianas.Calcular los sómbolos de Christo¤el de segunda especie.
Problema 34.Se dan las coordenadas cilíndricas en el EGO, y un campo tensorial de
segundo orden, cova-contravariante, de componentes en cilíndricas
t ji =
0@ 0 � 00 0 00 0 0
1A :
1) Componentes del tensor en cartesianas.2) Componentes de T; en cilíndricas y cartesianas.3) Componentes de @T
@�en cilíndricas y cartesianas.
4) Componentes de @T@�en cilíndricas y cartesianas.
5) Componentes de @T@zen cilíndricas y cartesianas.
6) Componentes de dT en cilíndricas y cartesianas.
7) Dada la curva C �
8<:� = a� = �z = �2
, calcular las componentes de �T��en cilín-
dricas y cartesianas.
Problema 35.Obtener, para un espacio V n
� (R)1) "i1 � � � "in ;k2) �j1��� ;jni1���in ;k
Problema 36.

4.5. CURVAS EN V N� (R): 35
En un plano del EGO se establecen las coordenadas polares (O; �; �).En él se de�ne el tensor T = tijk(e
�i e�j e�k) de componentes tijk =�0 ��� 0
��0 �11 0
�.
1) Calcular T; en polares. 2) Calcular T en cartesianas.
36 CAPÍTULO 4. CAMPOS TENSORIALES EN V N� (R).

Capítulo 5
ESPACIOS PUNTUALESEUCLÍDEOS. CAMPOSTENSORIALES
5.1. De�nición de En� . Metrización.
Un espacio puntual euclídeo En� es un V n� en el que el espacio vectorial aso-
ciado es un espacio euclídeo En.Metrización
Es una aplicación d : En� �En� ! R, llamada distancia. Para un par de puntosX; Y 2 En� , d(X;Y ) =
��XY �� cumple las siguientes propiedades:��XY �� � 0��XY �� = 0, X = Y��XY ��+ ��Y Z�� � ��XZ����XY �� = ��Y X��Distancia �nita en un sistema de referencia fO;�!e ig
d(X; Y ) =��XY �� = ��OY �OX
�� = +p(yi � xi)(yj � xj)gij, o bien, matri-
cialmente,d(X; Y ) =
pkyi � xikGei fyj � xjg: (5.1)
Distancia elemental entre dos puntos in�nitamente próximos de co-ordenadas yi
37

38CAPÍTULO 5. ESPACIOS PUNTUALES EUCLÍDEOS. CAMPOSTENSORIALES
Y3
Y2
Y1
X ( yi)X '( yi+ d yi)
r + d r
d s
r
Figura 5.1: Distancia elemental
Sean los puntos X(yi); X 0(yi + dyi) con distancia entre ambos d(XX 0) =ds =
��XX 0�� = jdrj :
Es decir, (ds)2 = dr � dr = dyiei � dyjej = gijdyidyj. Por tanto,
(ds)2 = gijdyidyj (5.2)
Hay que tener en cuenta que, en espacios preeuclídeos, pueden haber dis-tancias negativas. La anterior expresión recibe el nombre de Primera FormaCuadrática Fundamental, elemento lineal o métrica.Longitud de arco de curva
La longitud de un arco sobre la curva Cfyi = yi(�)g, entre dos puntos A y B,puntos para los cuales el parámetro toma los valores �A; �B, viene dada por
dC(AB) =CR BAds =
R �B�A
qgij(�)
dyi
d�dyj
d�d� =
R �B�A
F (�)d�, donde la funciónF (�) tiene que ser contínua (F (�) 2 C1).
5.2. Campos tensoriales en En� .
Son los campos tensoriales tales que los tensores correspondientes a cadapunto están de�nidos en En. Los campos tesoriales euclídeos tienen la par-

5.3. SÍMBOLOS DE CHRISTOFFEL EN EN� 39
ticularidad de ser siempre homogéneos. Existen una serie de campos particu-lares de especial interés, por tener las componentes constantes: �p; ";
pg y
�, todos ellos relacionados con el tesor de permutaciones o la métrica.
5.3. Símbolos de Christo¤el en En�En primer lugar, conviene recordar que estamos utilizando siempre la base
natural como base de referencia: hi = ei.Los símbolos de Christo¤el de 2 a especie se de�nen igual que en V n
� :
@ei@yj
= �kijek (5.3)
Los de 1 a especie se de�nen como:
@ei@yj
= �ij;kek (5.4)
Además, tenemos las siguientes relaciones:�kij = gkl�ij;l�ij;k =
@ei@yjek
� kij = gkl�ij;l�ij;k =
@ei@yjek
� kij = @ei
@yjek
@ei
@yj= �� i
jk ek ) � ijk = � @ei
@yjek
Los símbolos de Christo¤el tienen la siguientes propiedades:1) �ij;k son n
3 funciones de punto. Dado que gij 2 C1, �ij;k 2 C0:2) �ij;k son simétricos en los índices primero y segundo.3) Identidades de Ricci
@gij@yk
= �ik;j + �jk;i (5.5)
@gij
@yk= �g�j� i
�k � gi�� i�k (5.6)
En efecto, aprovechando la de�nición del tensor métrico, tenemos:@gij@yk
=@(ei�ej)@yk
=�@ei@yk� ej�+�ei � @ej@yk
�=�
�ik;lel � ej
�+�ei � �jk;lel
�= �ik;j + �jk;i:

40CAPÍTULO 5. ESPACIOS PUNTUALES EUCLÍDEOS. CAMPOSTENSORIALES
4) Cambio de sistema curvilíneo para los símbolos de Christo¤elSi trataramos de ver como cambian las �ijk al cambiar de sistema curvilíneo,tendríamos:@e0i@y0j = �
0ij;ke
0k =@�@y�
@y0je��
@y0j )�0ij;k =
@y�
@y0i@y�
@y0j@y
@y0k���; +@2y�
@y0i@y0j �@y�
@y0k g��, lo cual nos indica que el sistemade componentes ���; no tiene naturaleza tensorial, por no cumplir con lasrelaciones tensoriales.
5) Simbolos de Christo¤el en cartesianas:Dado que gij son constantes en cartesianas, �ij;k = �
kij = 0.
6) Obtención de los símbolos de Christo¤elAprovechando la identidad de Ricci, @gij
@yk= �ik;j + �jk;i, permutando los
índices y sumando, encontramos que:
�ik;j =1
2
�@gik@yj
+@gjk@yi
� @gij@yk
�(5.7)
7) Contracción de los símbolos de Christo¤elEn espacios puntuales euclídeos sólo,
� �i� =
@ lnpg
@yi=
1pg
@pg
@yi=1
2g
@g
@yi(5.8)
La derivada de un determinante��a ji (�
1; � � � ; �p)�� se hace de la siguiente
forma:
@��a ji (�
1; � � � ; �p)��
@�h=��a ji
�� @a ��
@�ha �� (5.9)
Para el caso particular del determinante de la métrica,
@g
@yi= 2g� �
i� (5.10)
5.4. Volumen elemental en un En� :Dado un sistema de coordenadas curvilíneas y1; � � � yn se de�ne como vol-
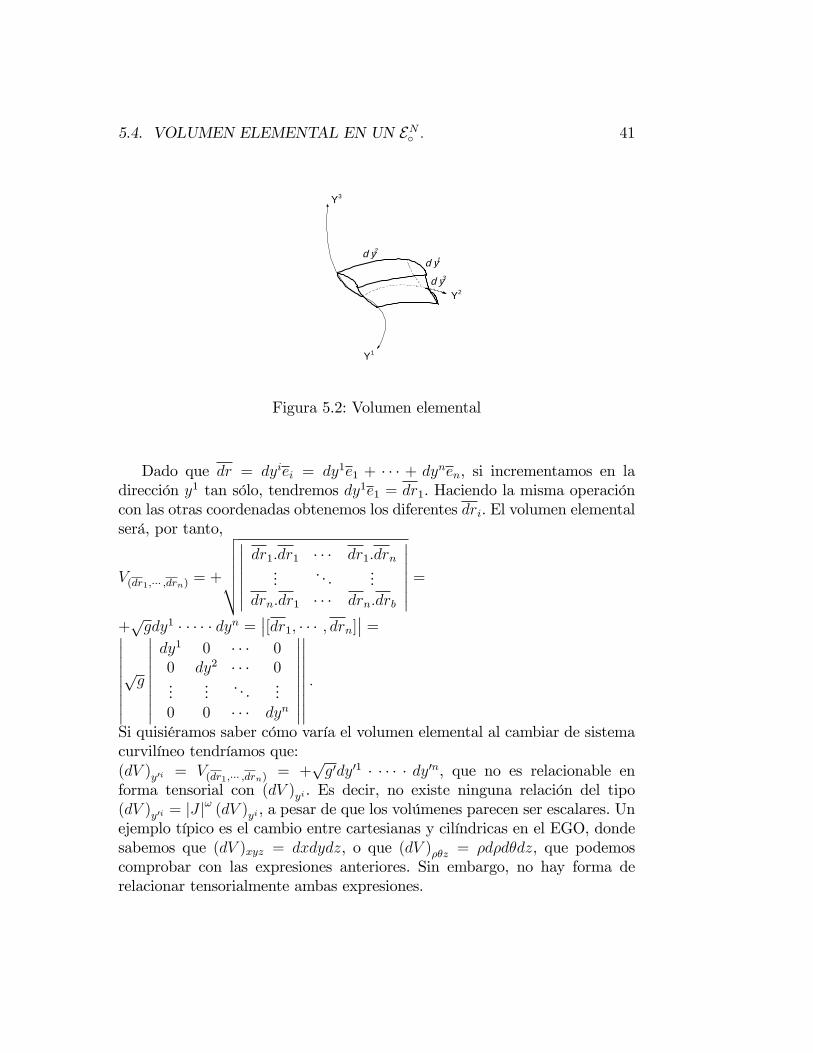
umen elemental a (dV )(y1;���yn) = V(dr1;��� ;drn):
5.4. VOLUMEN ELEMENTAL EN UN EN� : 41
Y3
Y2
Y1
d y2
d y1
d y3
Figura 5.2: Volumen elemental
Dado que dr = dyiei = dy1e1 + � � � + dynen, si incrementamos en ladirección y1 tan sólo, tendremos dy1e1 = dr1. Haciendo la misma operacióncon las otras coordenadas obtenemos los diferentes dri. El volumen elementalserá, por tanto,
V(dr1;��� ;drn) = +
vuuuut�������dr1:dr1 � � � dr1:drn...
. . ....
drn:dr1 � � � drn:drb
������� =+pgdy1 � � � � � dyn =
��[dr1; � � � ; drn]�� =���������pg
���������dy1 0 � � � 00 dy2 � � � 0...
.... . .
...0 0 � � � dyn
���������
��������� :Si quisiéramos saber cómo varía el volumen elemental al cambiar de sistemacurvilíneo tendríamos que:(dV )y0i = V(dr1;��� ;drn) = +
pg0dy01 � � � � � dy0n, que no es relacionable en
forma tensorial con (dV )yi. Es decir, no existe ninguna relación del tipo(dV )y0i = jJ j
! (dV )yi, a pesar de que los volúmenes parecen ser escalares. Unejemplo típico es el cambio entre cartesianas y cilíndricas en el EGO, dondesabemos que (dV )xyz = dxdydz, o que (dV )��z = �d�d�dz, que podemoscomprobar con las expresiones anteriores. Sin embargo, no hay forma derelacionar tensorialmente ambas expresiones.

42CAPÍTULO 5. ESPACIOS PUNTUALES EUCLÍDEOS. CAMPOSTENSORIALES
Figura 5.3: Vectores que intervienen en la derivada direccional
5.5. Derivada direccional de un campo tenso-rial T:
(según la dirección de un campo vectorial v 2 En� :)Se de�ne como
�dTds
�v= T; �v0, siendo v0 el vector unitario con la dirección
de v: Este campo tesorial tiene la misma naturaleza que T:A la derivada direccional puede dársele la siguiente interpretación ge-
ométrica. De�namos�dr�v0= (ds)v0 :v0, proyección de dr en la dirección de
v, y (dT )vo = T; ��dr�v0. Es decir, (ds)v0 = dr � v0. Entonces,�
dT
ds
�v
=T; �v0: (ds)v0(ds)v0
=T; ��dr�v0
(ds)v0(5.11)
Para un campo escalar en cilíndricas, U = �, tendríamos que:�dUds
�h�= U; �h� = U;i h
i � h� = U;i �i
� = U;�=@U@�= 0:
Para campos escalares, e incluso vectoriales, la derivada direccional tienefácil interpretación geométrica, pero no ocurre así con los campos de ordensuperior.

Capítulo 6
OPERADORESDIFERENCIALES EN En
6.1. Operadores de primer orden.
6.1.1. Campo escalar U2 C1
Gradiente o derivada covariante rU :
Grad U = U;=@U
@yihi
(6.1)
6.1.2. Campo vectorial f 2 C1 y campos tensoriales engeneral.
Gradiente rf :
Grad f = f;= fi;j
�hi h
j�= f i;j
�hi h
j�=
fi;j�hi hj
�=�@f i
@yj+ fk�jk:
i��
hi hj�)
Grad f = f;=@f
@yi h
i(6.2)
El gradiente, por ser la derivada covariante, aumenta en un orden la natu-raleza del campo vectorial. Lo mismo ocurre con el gradiente de un tensor.
43

44 CAPÍTULO 6. OPERADORES DIFERENCIALES EN EN
En general, para cualquier campo tensorial, el gradiente siempre se de�necomo su derivada covariante. Es decir, grad T = T;= @T
@yi h
i: Las distintas
formas en que puede escribirse se deben a las propiedades de los espaciospreeuclídeos y euclídeos.
Divergencia de f , r � f y de campos tensoriales T
La divergencia de un campo vectorial de de�ne como la contracción del gra-diente. Es decir,Div f = C [f; ] = f�;�= f�;
�= @f@yi� hi =
@f�
@y�+ f� 1p
g
@pg
@y�)
Div f =1pg
@
@yi�p
gf i�
(6.3)
También existe la divergencia de cualquier campo tensorial, que se de�necomo la contracción del gradiente. Para T = tij (ei ej), tendríamos queexisten dos divergencias posibles, según los índices que se contraigan:
div2T = C12
h�@tij
@yk+ t�j��k
i + ti���k:j� �ei ej ek
�i=�
@t�j
@y�+ t�j���
� + t�����:j�ej o div3T = C13 [T; ]. Ambas divergencias coin-
cidirian si el tensor fuera simétrico, caso bastante común en Física.
Campo rotacional o de Stokes.
R(f) = fC ;�f; (6.4)
R(f) = (fj;i�fi;j )�hi h
j�=�@fj@yi� @fi
@yj
��hi h
j�=
���ij f�;�
�hi h
j�= ���ij
@f�@y�
�hi h
j�:
Es un tensor euclídeo hemisimétrico de segundo orden. Por ser hemisimétricopuede escribirse en componentes estrictas como:
R(f) = ���(ij)f�;�
�h(i) ^ h(j)
�:
También puede escribirse, como forma alternativa,R(f) = h
i @f@yi� @f
@yi h
i= h
i ^ @f@yi:
Para el caso particular de E3� existe el operador rotacional, que se de�ne comoel adjunto del campo de Stokes. El rotacional es, por tanto,
6.2. OPERADORES DE SEGUNDO ORDEN. 45
Rotf =�R�f��A= �(ij)kr(ij)hk =
�(ij)k���(ij)f�;� hk = ���kf�;� hk =
Rotf =1pg
������h1 h2 h3@@y1
@@y2
@@y3
f1 f2 f3
������ (6.5)
Si trataramos de construir el rotacional en un espacio de orden superior,sería un tensor de orden n � 2. También el vector rotacional admite unaforma alternativa más compacta:
Rotf = r� f = hi � @f
@yi(6.6)
6.2. Operadores de segundo orden.
6.2.1. Campos escalares U 2 C2. Laplaciana.4U = C[U; ; ], que es un campo escalar de componentes
4U =��grad U
�;�= div
�grad U
�= C
hU;ij
�hi h
j�i)
4U = gij�
@2U
@yi@yj� @U
@y��ij:
�
�(6.7)
Otra forma de expresar la Laplaciana es:
4U = @grad U
@yi� hi
6.2.2. Para campos vectoriales f 2 C2: Laplaciana.4 f = C23 [f; ; ] = f i;� :
�hi = g��f i;�� hi =
fi;� :�h
i= g��fi;�� h
i.
Una fórmula análoga es
4 f =@ gradf
@yi� hi (6.8)

46 CAPÍTULO 6. OPERADORES DIFERENCIALES EN EN
En el EGO, la Laplaciana puede expresarse como 4 f = grad�divf
��
rot�rotf
�=
= r ��rf��r�
�r� f
�.
En cuatro dimensiones, la Laplaciana suele recibir el nombre de D�Alambertiana�.Problema 37.
En el EGO, nos dan el sistema curvilíneo de�nido porx = v coshuy = v sinhuz = w1) Buscar la región de regularidad.2) Super�cies coordenadas.3) Vectores naturales.4) Campo tensorial métrico.5) Símbolos de Christo¤el de primera y segunda especie.6) Si un punto se mieve sobre la curva u = k, v = t2, w = t2, encontrar laaceleración de dicho punto.
Problema 38.Se llama campo tensorial de deformaciones a D = f;+f;C +C13 [f;f; ]1) Hallar el transformado bdr de dr en función de dr y f;.2) Hallar bdr � cdr0 en función de dr, f; y D.3) Hallar bds en función de ds y D. Naturaleza de D.4) Interpretación geométrica de las componentes covariantes de D en unsistema curvilíneo cualquiera.
Problema 39.En un sistema curvilíneo fy1; � � � ; yng de En� se dan los siguientes campos:U = yl; f = hl; g = h
l. Calcular:
1) Derivadas covariantes.2) Derivadas covariantes segundas.3) Operadores diferenciales.
6.3. Super�cies de nivel y lineas de campo.
(Super�cies de nivel de un campo escalar U y lineas

6.3. SUPERFICIES DE NIVEL Y LINEAS DE CAMPO. 47
Figura 6.1: Línea de campo de un campo vectorial�!f , respecto de un
parámetro u.
de campo de un campo vectorial f)
6.3.1. Super�cies de nivel de U .
Son las super�cies tales que, en el EGO, U(y1; y2; y3) = cte: En espaciosde mayor dimensión serían hipersuper�cies. Para un campo general U , consuper�cies de nivel dadas F (y1; y2; y3) = k, el campo U = U(F ) siempre.
6.3.2. Lineas de campo de un f
Son la curvas tales que, en cada punto del espacio, f es tangente a dichascurvas. Por lo tanto, f es proporcional a tu. Es decir, en la base naturalhi, donde f = f ihi, tu =
@yi
@uhi. Por lo tanto, las curvas pueden calcularse
resolviendo la ecuación diferencial
dy1
f 1=dy2
f 2=dy3
f 3(6.9)
Para un campo f general, con lineas de campo dadas por U(yi) = a; V (yi) =b, f = �(yi)gradU � gradV , siendo �(yi) una función arbitraria.
48 CAPÍTULO 6. OPERADORES DIFERENCIALES EN EN
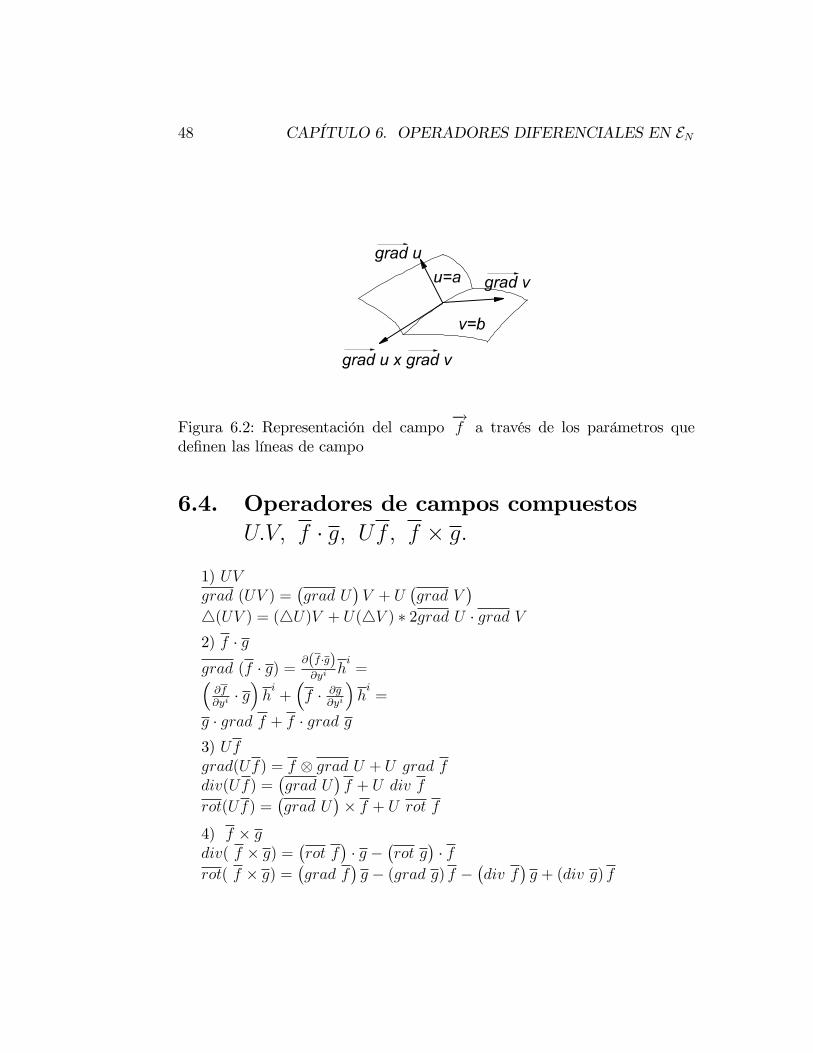
Figura 6.2: Representación del campo�!f a través de los parámetros que
de�nen las líneas de campo
6.4. Operadores de campos compuestosU:V; f � g; Uf; f � g:
1) UVgrad (UV ) =
�grad U
�V + U
�grad V
�4(UV ) = (4U)V + U(4V ) � 2grad U � grad V2) f � ggrad (f � g) = @(f �g)
@yihi=�
@f@yi� g�hi+�f � @g
@yi
�hi=
g � grad f + f � grad g3) Ufgrad(Uf) = f grad U + U grad fdiv(Uf) =
�grad U
�f + U div f
rot(Uf) =�grad U
�� f + U rot f
4) f � gdiv( f � g) =
�rot f
�� g �
�rot g
�� f
rot( f � g) =�grad f
�g � (grad g) f �
�div f
�g + (div g) f
6.5. PROPIEDADES GEOMÉTRICAS DE GRAD U . 49
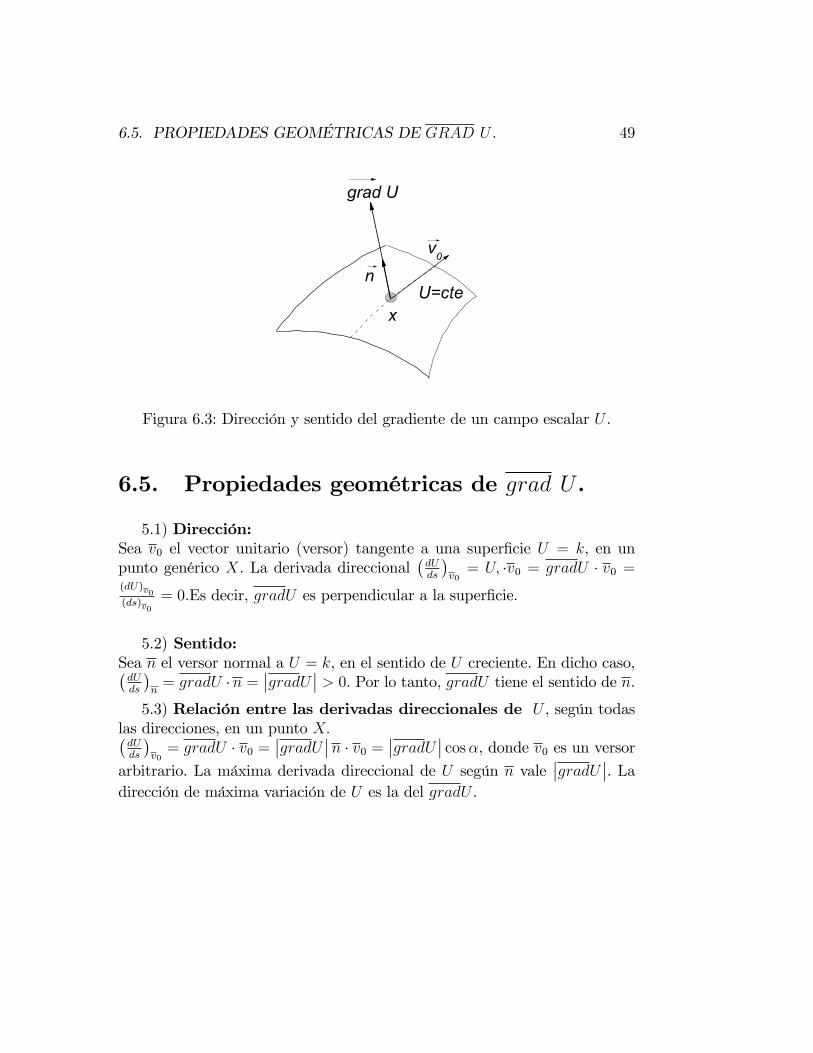
Figura 6.3: Dirección y sentido del gradiente de un campo escalar U .
6.5. Propiedades geométricas de grad U .
5.1) Dirección:Sea v0 el vector unitario (versor) tangente a una super�cie U = k, en unpunto genérico X. La derivada direccional
�dUds
�v0= U; �v0 = gradU � v0 =
(dU)v0(ds)v0
= 0:Es decir, gradU es perpendicular a la super�cie.
5.2) Sentido:Sea n el versor normal a U = k, en el sentido de U creciente. En dicho caso,�dUds
�n= gradU �n =
��gradU �� > 0. Por lo tanto, gradU tiene el sentido de n.5.3) Relación entre las derivadas direccionales de U , según todas
las direcciones, en un punto X:�dUds
�v0= gradU � v0 =
��gradU ��n � v0 = ��gradU �� cos�, donde v0 es un versorarbitrario. La máxima derivada direccional de U según n vale
��gradU ��. Ladirección de máxima variación de U es la del gradU .
50 CAPÍTULO 6. OPERADORES DIFERENCIALES EN EN
Capítulo 7
Campos especiales en En� :
7.0.1. A) Para campos escalares
U 2 C1 es armónico ,4U = 0
7.0.2. B) Para campos vectoriales y, en su caso, tenso-riales:
f 2 C0 es conservativo , (9U 2 C1�f = gradU)f 2 C1 es irrotacional , R(f) = (en el EGO, rot f = 0)f 2 C1 es solenoidal ) div f = 0f 2 C1 es armónico ) R(f) = y div f = 0
Como consecuencias inmediatas se deducen:f 2 C1 es irrotacional , f; es simétricof; es simétrico ) f es solenoidal
f 2 C1 es conservativo , f es irrotacional�9U�fi = @U
@yi, @fj
@yi= @fi
@yj
�En el EGO tenemos, además, que:f 2 C1 es armónico )4 f = 0Sin embargo, 4 f = grad
�div f
�� rot
�rot f
�= 0; f armónico; pero si f
es armónico ))�rot f = 0 y div f = 0
�)4 f = 0:
f 2 C1 es armónico,�9U armónico �f = gradU
�Problema 40.
Operadores diferenciales de ambos campos.
51

52 CAPÍTULO 7. CAMPOS ESPECIALES EN EN� :
Problema 41.En el EGO y en un sistema cartesiano ortonormal nos dan los vectoresde�nidos por
P =
������i j k
2x� a 2y 2z2x 2y � b 2z
������ ;Q =
������i j k
2x� a 2y 2z2x 2y 2z � c
������ ;R =
������i j k2x 2y � b 2z2x 2y 2z � c
������ ;donde a = x2+y2+z2
x; b = x2+y2+z2
y; c = x2+y2+z2
z. Se pide encontrar
1) Las ecuaciones de ls lineas de campo de los tres vectores.2) Las super�cies ortogonales a los tres vectores.
Problema 42.De un campo newtoniano, creado por una masa activa puntual unidad, sesabe que su �ujo a través de la esfera x2+y2+z2 = 1 vale 4�, y que, a travésde x2 + y2 + z2 � 2y = 0, vale 8�:1) Calcular la constante de �ujo K� del campo newtoniano.2) Describir la región de regularidad N de la posible localización de la masaunidad.3) Suponiendo una masa activa unidad uniformemente distribuida en N ,hallar el campo newtoniano en el origen de coordenadas.
Problema 43.En el EGO nos dan los campos f; v 2 C1. Estudiar la posible validez de lasfórmulas:1)�dfds
�v= f;s v0 +
12
�rot f
�� v0
2)�dfds
�v0= 1
2
�rot f
�� v0
3)�dfds
�v= grad
�f � v0
�4)�dfds
�v= rot
�f � v0
�Problema 44.
Nos dan, en el EGO, un campo newtoniano creado por una masa distribuidasobre una cierta super�cie S, con densidad super�cial de masa proporcional

53
a 1R3, siendo R =
px2 + y2 + (z � h)2, con 0 < h > 1.
1) Calcular el potencial generado en el punto (0; 0; h)2) Calcular el potencial cuando S es x2 + y2 + z2 = 13) Calcular el potencial cuando S es la parte de la super�cie esférica anterior,interior al cilindro x2 + y2 � x = 0.
54 CAPÍTULO 7. CAMPOS ESPECIALES EN EN� :
Capítulo 8
CIRCULACIÓN DE UNCAMPO VECTORIAL f .FLUJO.
8.1. Circulación
1.1) Se llama circulación elemental dCC�f�de un campo f , a lo
largo de un elemento de curva C, a dCC�f�=�f � dr
�C: Dado que la curva
la describimos mediante un parámetro u, al cual han de estar ligadas lascoordenadas curvilíneas, C = Cfyi = yi(u)g, y que dr = dyihi, tenemos quedCC
�f�= (fidy
i)C = fi(u)dyi
dudu = F (u) 2 C0.
1.2) La circulación �nita CCBA�f�de un campo f;a lo largo de un aporción
de curva C, se de�ne como CCBA�f�=CR BAf � dr =C
R BAfidy
i )
CCBA�f�=
Z u(B)
u(A)
�fi(u)
dyi
du
�du (8.1)
1.3) Condiciones su�cientes para que exista, y se pueda de�nir,CCBA
�f�:
� La curva C = Cfyi = yi(u)g ha de ser tal que yi = yi(u) 2 C1. Además,ha de ser uniforme, es decir, lisa excepto en un número �nito de puntos.� El campo f ha de ser uniforme y contínuo.
55

56CAPÍTULO 8. CIRCULACIÓNDEUNCAMPOVECTORIAL F . FLUJO.
8.2. Flujo
2.1) Se de�ne como �ujo elemental d�s�f�de un campo f , a través de
un elemento de super�cie dS, a
d�s�f�= f � ndS = f � dS (8.2)
siendo n el vector unitario (versor) perpendicular al elemento de super�cie.2.2). El �ujo �nito �s
�f�de un campo f;a través de una porción de
super�cie, es
�s�f�=
ZZf � ndS =
Z�
f�d��; (8.3)
donde el último término de la igualdad representa la generalización a cualquierdimensionalidad.
2.3) Las condiciones su�cientes para que exista �s�f�son:
� Que f sea uniforme y f 2 C1� Que S = Sfyi = yi(u; v)g 2 C1 sea una super�cie lisa o descomponible enun número �nito de porciones donde lo sea.
2.4) Interpretación geométrica del �ujo. d�s�f�puede interpretarse
como la cantidad de campo que atraviesa normalmente el elemento de super-�cie, o como el volumen encerrado en un cuerpo de base dS y altura f � n.Es decir, con altura recta (perpendicular a dS) dada por la proyección de fen la dirección de n.
Formas de calcular �s�f�. Dado que �s
�f�=RRSf � ndS: =
RR�(yi)
es una integral de super�cie, podemos transformarla en una integral doble:a) Si la super�cie viene dada en paramétricas por S = Sfyi = yi(u; v)g,
(dS)u;v =
qsguvdudv, con lo que �(y
i) = �(u; v): En este caso,
�s�f�=
Z u1
u0
Z v1
v0
�(u; v)dudv: (8.4)
b) Otra forma es más coveniente, si la super�cie está dada en implícitas comoz = z(y1; y2); es la siguiente:
RRS�(yi)dS =
RRSz(y1; y2)dS
0
n�k , siendo dS0 la proyección de dS en el plano
z = 0. Entonces,

8.2. FLUJO 57
Figura 8.1: Interpretación geométrica del �ujo
Figura 8.2: Figura auxiliar para el cálculo del �ujo

58CAPÍTULO 8. CIRCULACIÓNDEUNCAMPOVECTORIAL F . FLUJO.
ZZS
�(yi)dS =
Z y11
y10
Z y21
y20
�(y1; y2)
n � kpgy1y2dy
1dy2 (8.5)
La normal n a la super�cie puede calcularse de varias formas. Una deellas es útil cuando la super�cie viene descrita por una función U(y1; y2; y3).En este caso,
n =
gradU��gradU ��
!S
: (8.6)
Si no se encontrara forma de pasar la curva a implícitas, habría que tra-bajar con S = Sfyi = yi(u; v)g. En este caso n = tu�tv
jtu�tvj : Dado que tu =dyi
duhi, y comojx� yj =
p�(x; y) y Gtutv =
s
Gu;v, podemos escribir que
n = 1qsgu;v
@yi
@u@yj
@v�ijkh
k )
n =
pgijqsgu;v
�������h1
h2
h3
@y1
@u@y2
@u@y3
@u@y1
@v@y2
@v@y3
@v
������� (8.7)
con lo que �S(f) =R u1u0
R v1v0
�f; tu; tv
�dudv, representando los corchetes al
producto mixto de los tres vectores.
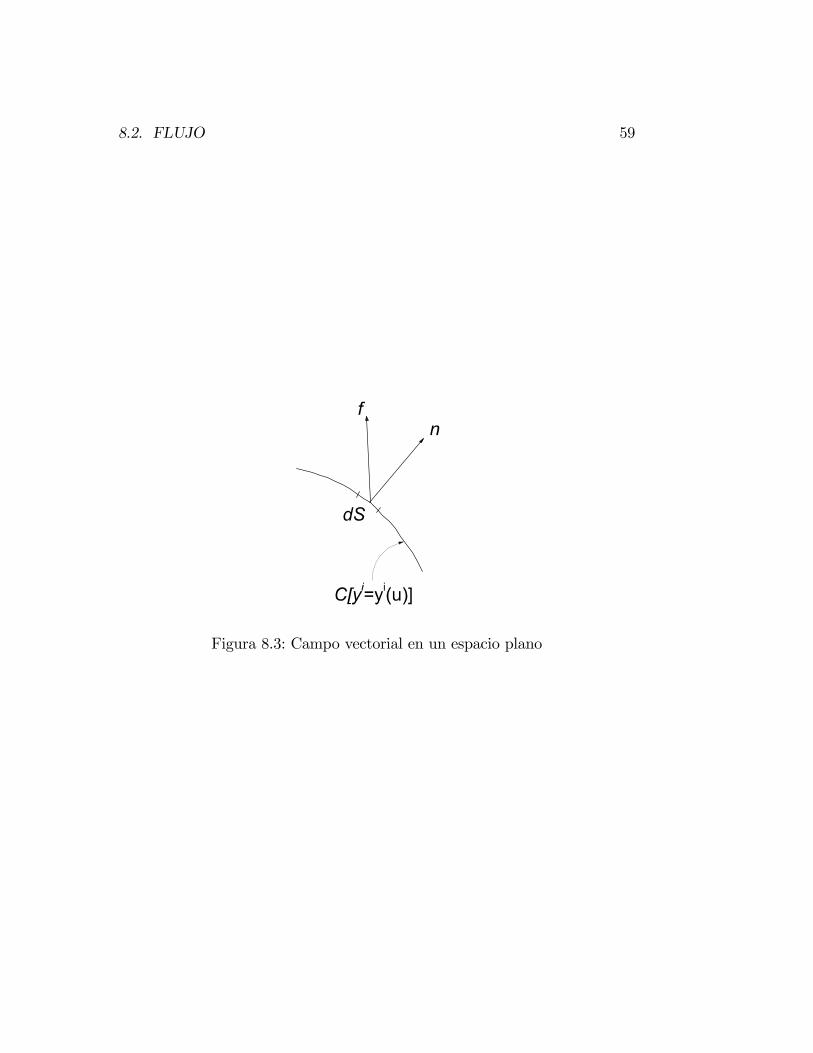
2.5) Cuando f es un campo plano, es decir, de�nido sólo en un plano, oque se repite en todos los planos paralelos a uno dado, estando f contenidoen él, la circulación es idéntica a la del caso general. No ocurre así con el �ujoa través de una curva C, contenida en el mismo plano que el campo f . Eneste caso
�C�f�=C
Z B
A
f � ndS (8.8)
Dado que la curva viene de�nida por un sólo parámetro Cfyi = yi(u)g, yque, ahora,
(dS)2 = jdrj2 = gijdyidyj, se obtendrá que (dS)2C = gij(u)
dyi
dudyj
du(du)2.
8.2. FLUJO 59
Figura 8.3: Campo vectorial en un espacio plano
60CAPÍTULO 8. CIRCULACIÓNDEUNCAMPOVECTORIAL F . FLUJO.

Capítulo 9
TEOREMAS INTEGRALES
9.1. Teorema de Stokes en el EGO
9.1.1. Fórmula matemática de Stokes en el EGO
Por razones históricas, usaremos coordenadas cartesianas en este capítu-lo, pero lo que vamos a detallar se puede extender a cualquier tipo de coor-denadas curvilíneas. Para una curva cerrada que encierra una determinadasuper�cie,
IXdx+
IY dy +
IZdz = ZZ
S
�@Z
@y� @Y
@z
�cos�dS +ZZ
S
�@X
@z� @Z
@x
�cos �dS + (9.1)ZZ
S
�@Y
@x� @X
@y
�cos dS
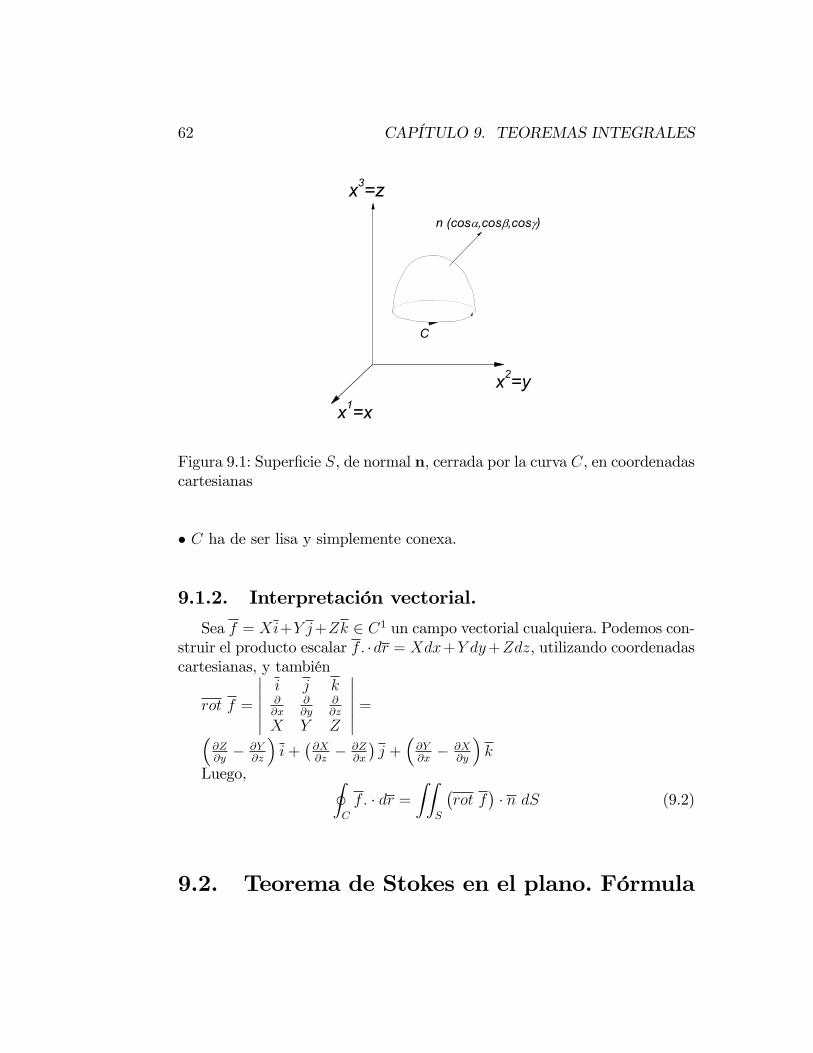
donde �; �; son los ángulos que forma la normal a la super�cie con los ejescartesianos, y se han de cumplir las siguientes condiciones:� X; Y; Z son funciones arbitrarias de x:y:z, contínuas y derivables, por lomenos una vez, tanto en C como en S.� S ha de ser lisa, orientable y simplemente conexa.
61
62 CAPÍTULO 9. TEOREMAS INTEGRALES
Figura 9.1: Super�cie S, de normal n, cerrada por la curva C, en coordenadascartesianas
� C ha de ser lisa y simplemente conexa.
9.1.2. Interpretación vectorial.
Sea f = Xi+Y j+Zk 2 C1 un campo vectorial cualquiera. Podemos con-struir el producto escalar f: �dr = Xdx+Y dy+Zdz, utilizando coordenadascartesianas, y también
rot f =
������i j k@@x
@@y
@@z
X Y Z
������ =�@Z@y� @Y
@z
�i+�@X@z� @Z
@x
�j +
�@Y@x� @X
@y
�k
Luego, IC
f: � dr =ZZ
S
�rot f
�� n dS (9.2)
9.2. Teorema de Stokes en el plano. Fórmula

9.2. TEOREMADE STOKES ENEL PLANO. FÓRMULAMATEMÁTICADERIEMANN.63
Figura 9.2: Recinto plano, R, limitado por la curva, también plana, C, encartesianas
matemática de Riemann.HXdx +
HY dy =
HC(Xdx+ Y dy) =
RRR
�@Y@x� @X
@y
�dR, siendo C la
curva que bordea un recinto plano R. Las condiciones su�cientes para que sesatisfaga la anterior igualdad son:� Que tanto X como Y sean funciones de (x; y) contínuas y derivables, porlo menos una vez en R y C.� Que la curva C sea lisa, simplemente conexa y cerrada.� Que R sea un recinto plano limitado por C.
9.2.1. Interpretación vectorial de la fórmula de Rie-mann.
Sea f = X(x; y)i+Y (x; y)j 2 C1 en C y R un campo plano arbitario. Aligual que en el caso anterior se puede construir el producto escalar f � dr =fidy
i = Xdx+ Y dy, en cartesianas. Podemos construir�rot f
�� k =
������i j k@@x
@@y
@@z
X Y 0
������ � k = @Y@x� @X
@y.
Por lo tanto,HCf: � dr =
RRR
�rot f
�� k dR:
64 CAPÍTULO 9. TEOREMAS INTEGRALES
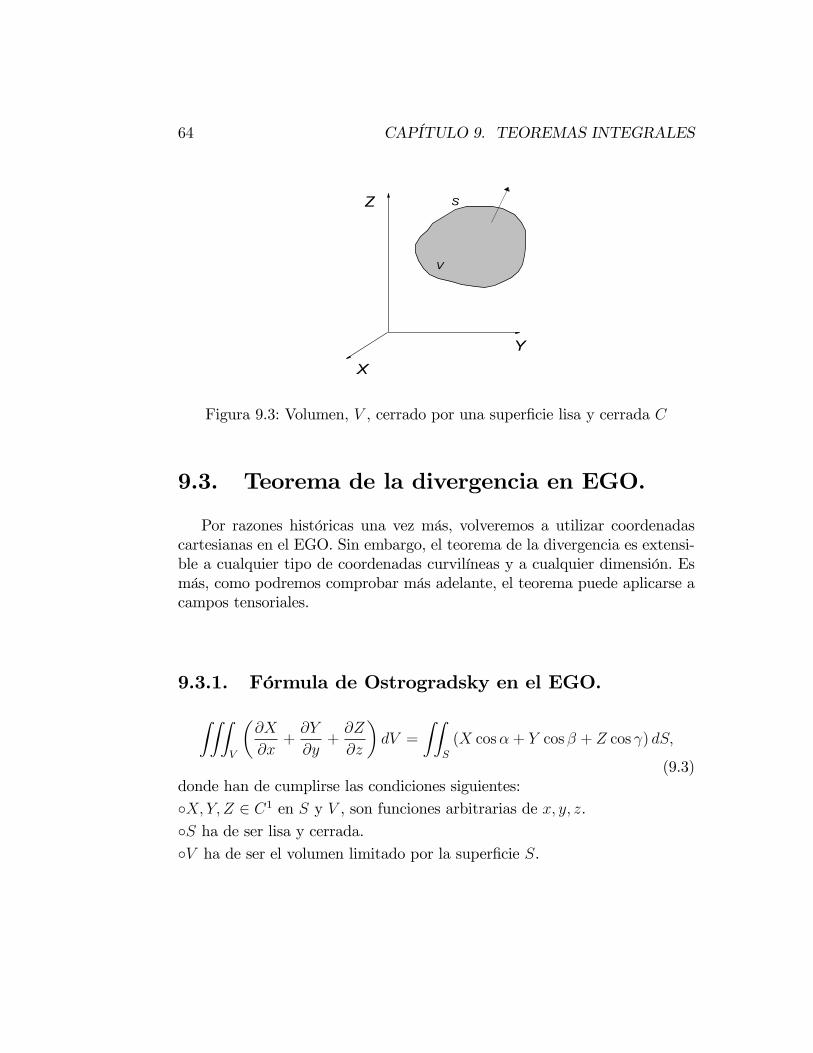
Figura 9.3: Volumen, V , cerrado por una super�cie lisa y cerrada C
9.3. Teorema de la divergencia en EGO.
Por razones históricas una vez más, volveremos a utilizar coordenadascartesianas en el EGO. Sin embargo, el teorema de la divergencia es extensi-ble a cualquier tipo de coordenadas curvilíneas y a cualquier dimensión. Esmás, como podremos comprobar más adelante, el teorema puede aplicarse acampos tensoriales.
9.3.1. Fórmula de Ostrogradsky en el EGO.
ZZZV
�@X
@x+@Y
@y+@Z
@z
�dV =
ZZS
(X cos�+ Y cos � + Z cos ) dS;
(9.3)donde han de cumplirse las condiciones siguientes:�X; Y; Z 2 C1 en S y V , son funciones arbitrarias de x; y; z.�S ha de ser lisa y cerrada.�V ha de ser el volumen limitado por la super�cie S.
9.4. TEOREMA DE LA DIVERGENCIA EN EL PLANO. 65
9.3.2. Teorema de la divergencia. Forma integral vec-torial.
Si f = Xi + Y j + Zk 2 C1 ) div f = @X@x+ @Y
@y+ @Z
@z. Por su parte
f � n = X cos� + Y cos � + Z cos , siendo �; �; los ángulos directores delversor normal a la super�cie. Es decir,ZZZ
V
div f dV =
ZZS
f � n dS (9.4)
Generalizando a cualquier espacio de dimensión arbitraria,Z
r�f�d =
Z�
f�d��; (9.5)
siendo � la hipersuperfície que envuelve al hipervolumen .El teorema de Gauss es una consecuencia del teorema de la divergen-
cia. Si S es una super�cie cerrada que envuelve sólo a una porción MI deuna distribución M de carga o masa (volumétrica, super�cial, lineal o pun-tual), entonces,
RRSf �dS = 4�MIK. Más adelante veremos el origen de esta
expresión.
9.3.3.
9.4. Teorema de la divergencia en el plano.
9.5. Fórmula de Ostrogradsky en el plano.
RRR
�@X@x+ @Y
@y
�dR =
HC(X cos�+ Y cos �) dS, donde las condiciones su�-
cientes para poderla de�nir son:� X; Y 2 C1 en R y C, son funciones arbitrarias de x; y:� C ha de ser continua, lisa, simplemente conexa y cerrada.� R ha de ser el recinto limitado por la curva C.

66 CAPÍTULO 9. TEOREMAS INTEGRALES
Figura 9.4: Intersección de una masa con una super�cie cerrada. Sólo la masainterior a la super�cie participa en el teorema de Gauss
9.5.1. Teorema de la divergencia. expresión integral de
la fórmula de Ostrogradsky en el plano.
Si f = Xi+ Y j 2 C1 en R y C )RRRdiv f dR =
HCf � n dS
9.5.2. Teorema del gradiente.Teoremas que se deducena partir del teorema de la divergencia.
ZZZV
grad U dV =
ZZS
Un dS (9.6)
En general, todos estos teoremas son aplicables a tensores, y a cualquierdimensión, siempre que se pueda de�nir la hipersuper�cie e hipervolúmencorrespondientes. Es decir,R���RTd =
R���Rt�:�(e� e�)d)R
���Rt�:�; (e� e� e )d =
R���R�t�:�(e� e�)end�.

9.6. EXPRESIÓN INTRÍNSECADE LOSOPERADORESDIFERENCIALES.67
Obviamente, el problema está en la determinación del tensor en. La situaciónes más simple en cartesianas, donde puede proyectarse � sobre los planoscartesianos, determinándose las n proyecciones de en.9.5.3. Teorema del rotacional.
ZZZV
rot f dV =
ZZZV
r� f dV =
ZZS
n� f dS (9.7)
Para comprobarlo basta aplicar el teorema de la divergencia a los camposvectoriales g1 = fzj � fxk; g2 = fxk � fzi; g3 = fyi� fxj:
9.5.4. Teorema de la laplaciana.
ZZZV
4U dV =
ZZS
@U
@ndS (9.8)
Se demuestra aplicando el teorema de la divergencia al campo f = gradU =rU
9.6. Expresión intrínseca de los operadoresdiferenciales.
Haciendo uso del teorema de Stokes y el de la divergencia, para volúmenespuntuales, se obtiene que, en un punto del espacio
divf = r � f = l��mV!0
1
V
ZZf � n dS (9.9)
rot f = r� f = l��mV!0
1
V
ZZn� f dS (9.10)
68 CAPÍTULO 9. TEOREMAS INTEGRALES
Capítulo 10
CAMPOS CONSERVATIVOS
10.1. De�nición.
Un campo vectorial f 2 C0 es conservativo si 9U 2 C1�f = rU =grad U: Como consecuencias de ello se deduce:
1) f 2 C0 es conservativo , f irrotacional�R(f) =
�La equivalencia es
obvia ya que, si f = @U@yI
,�@fj@yi= @fi
@yj
�:
2) f 2 C0 es conservativo ,�fidy
i = f � dr es diferencial exacta�. Es decir,
9U�dU = fidyi:
La condición necesaria para que se cumpla la anterior equivalencia es quef � dr = rU:dr = dU:La condición su�ciente es que si 9U 2 C1�dU = f �dr, como dU = rU:dr )f = rU:3) f 2 C0 es conservativo , 8 curva C lisa, CCBA(f) es independiente de C:La condición necesaria para que se cumpla es que CCBA(f) =C
R BAf �dr =C
R BAdU =
UB � UA:La condición su�ciente es que si C
R BAf �dr es independiente deC )9U�C
R xAf �
dr = U(x)) dU = f � dr:4) f 2 C0 es conservativo , 8 curva C cerrada y lisa, CC(f) = 0, como sededuce de la anterior consecuencia.
5) f 2 C0 es conservativo ) f = rU = grad U , con U de�nida y llamadafunción potencial de f y V = �U , el potencial escalas de f .
69

70 CAPÍTULO 10. CAMPOS CONSERVATIVOS
Figura 10.1: Figura de apoyo para comprobar la equivalencia anterior
De las anteriores propiedades de dedude que si f 2 C1 admite super�ciesortogonales, f �rot f = 0, 9�B��Bf es irrotacional, f = � grad U .Las funciones �B o � son arbitrarias. Es decir, U no está de�nida biunívoca-mente.
La condición necesaria para que se cumpla esta equivalencia es que se puedaaplicar el teorema de Stokes en C y S. Es decir,HCf � dr = 0 =
RRSrotf � n dS = 0, para in�nitas S ortogonales a f )
rotf � n = 0. Ahora bien, si S son ortogonales a f , n y f tienen la mismadirección y son proporcionales, f � rotf = 0: La condición su�ciente es que sif � rotf = 0 =
f � 1pg
������h1 h2 h3
@=@y1 @=@y2 @=@y3
f1 f2 f3
������)f1
�@f3@y2� @f2
@y3
�+ f2
�@f1@y3� @f3
@y1
�+ f3
�@f2@y1� @f1
@y2
�= 0)
f1dy1 + f2dy
2 + f3dy3 = 0 es integrable )
9�R��Rfidyi es diferencial exacta, ya que �Rf es irrotacional ) 9U��Rf �

10.1. DEFINICIÓN. 71
dr = grad U � dr = dU )9�R; U; ��9�Rf = grad U ) f = � grad U , con � = 1=�R:
Problema 45.De un campo vectorial f , de�nido en un dominio espacial V simplementeconexo, se conocen, en V , los campos div f y rot f . Y sobre una super�cieS se conoce fn = f � n. Demostrar que f está unívocamente de�nido en V:Problema 46.
En un sistema cartesiano ortonormal fO;X; Y; Zg del EGO, se tiene untoroide engendrado por la circunferencia (y � 2)2 + z2 = 1, en plano x = 0,al girar alrededor del eje Z. Se da el campo U = arctan y
x: Se piden:
1) Naturaleza de U .2) Grad U , sus super�cies equipotenciales y líneas de campo.3) @U
@n=�@U@s
�n:
Problema 47.Las super�cies equipontenciales de un campo f en el EGO son la familiax2 � y2 = �. Se piden:1) Expresión analítica de f:2)�@f@s
�k, cuando f = grad �:
3) Circulación de f a lo largo de la curva�x2 + y2 + z2 = 9y + z = 3
4) Flujo de f a través de la menor super�cie intersectada por x2+y2+z2 = 9e y + z = 3:
Problema 48.Una corriente eléctrica circula por un conductor lineal creando un campovectorial que, según la ley de Biot-Savat, es df = k0I
dr�rr3, con k0 e I con-
stantes.1) Calcular el campo en un punto P en el caso de que el conductor sea plano,y P un punto en el plano.2) Calcular el campo en un punto P a distancia a, creado por un conductorrectilíneo de longitud L.3) Calcular el campo en un punto P a distancia a, creado por un conductorrectilíneo in�nito.4) Calcular el campo creado por una corriente que circula por una elipse, enuno de los focos.5) Calcular el campo creado por una corriente que circula por una circunfer-encia, en su centro.

72 CAPÍTULO 10. CAMPOS CONSERVATIVOS
10.2. Circulación de un campo irrotacional.
(a lo largo de una curva cerrada).Este tipo de problema es bastante corriente en Física. Normalmente basta
con aplicar el teorema de Stokes. Pero pueden surgir di�cultades si existenpuntos singulares. Estos puntos son aquellos en los que el campo f , referidoa una base �ja, deja de pertenecer a C1. Pueden darse diferentes casos.
10.2.1. Punto sigular aislado P .
Si el punto P está fuera de la curva, aplicando el teorema de Stokes, CC(f) =0: Dado que la super�cie sobre la que se apoya la curva es totalmente arbi-traria, siempre se puede escoger una super�cie que no comprenda al punto yen la que CC(f ) =
RRSrot f dS = 0. Si el punto estuviera sobre la curva C
habría que aislarlo. Lo mismo ocurre con una linea de puntos singulares abier-ta pero �nita. Siempre existe alguna super�cie que la aisle y donde puedaaplicarse el teorema de Stokes.
10.2.2. Linea de puntos singulares cerrada o inde�nidapor ambos extremos: linea stokiana L
Este tipo de linea es imposible de encerrar por una super�cie que no lacorte. La circulación de un campo irrotacional en la stokiana L, a lo largode cualquier curva C cerrada, que rodee la stokiana, es siempre la misma,
10.2. CIRCULACIÓN DE UN CAMPO IRROTACIONAL. 73
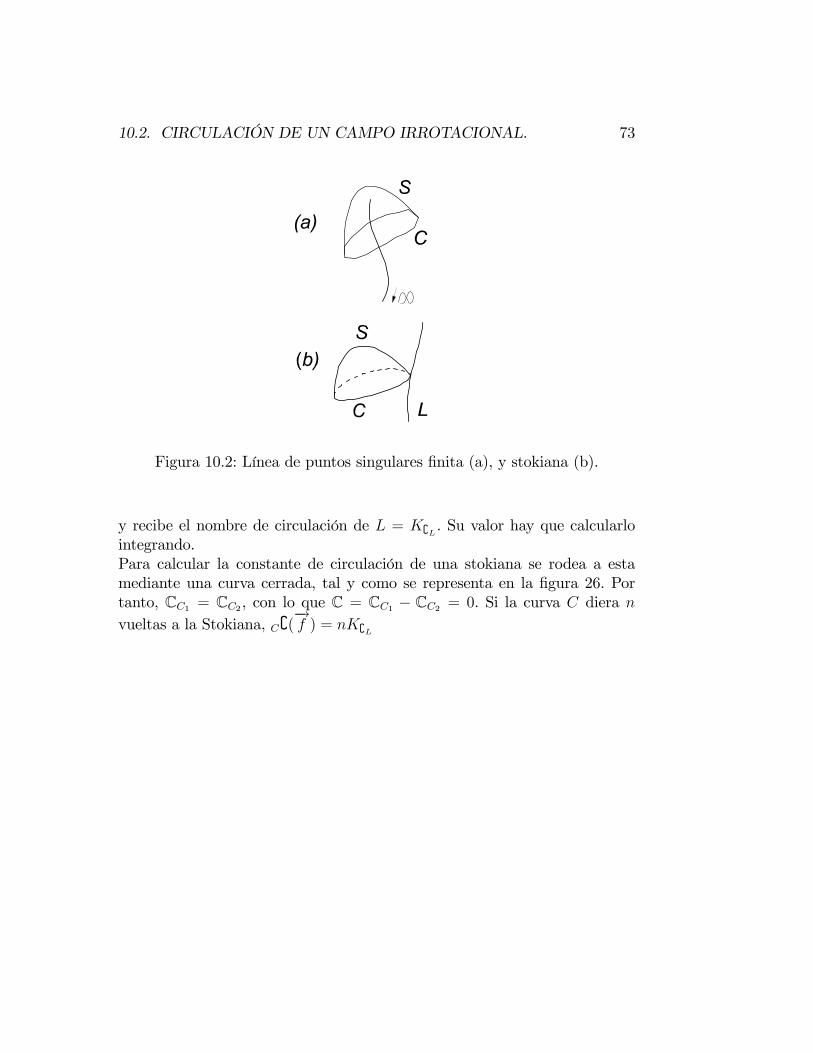
Figura 10.2: Línea de puntos singulares �nita (a), y stokiana (b).
y recibe el nombre de circulación de L = K{L . Su valor hay que calcularlointegrando.Para calcular la constante de circulación de una stokiana se rodea a estamediante una curva cerrada, tal y como se representa en la �gura 26. Portanto, CC1 = CC2, con lo que C = CC1 � CC2 = 0. Si la curva C diera nvueltas a la Stokiana, C{(
�!f ) = nK{L

74 CAPÍTULO 10. CAMPOS CONSERVATIVOS
Figura 10.3: Forma de calcular la constante de circulación de una stokiana.

Capítulo 11
CAMPOS SOLENOIDALES.DISCONTINUIDADES
11.1. De�nición
Un campo vectorial, f 2 C1 es solenoidal si divf = 0:
11.2. Propiedades
1) f 2 C1 es solenoidal , 8S, super�cie cerrada, continua, lisa y orientable,�S(f) = 0: Para comprobarlo, basta con aplicar el teorema de la divergencia:�S(f) =
RRSf � n dS =
RRRVdiv f dV = 0, siendo V el volúmen encerrado
por S. Por otra parte, para cualquier volúmen V , siRRR
VdivfdV = 0 )
div f = 0:
2) f 2 C1 es solenoidal , 8C, curva cerrada y lisa, el �ujo del campo f através de cualquier casquete (S1; S2, etc.) de borde C es siempre el mismo.Es decir, el �ujo de f a través de cualquier super�cie abierta que se apoye enla curva es el mismo. Para comprobarlo basta pensar que ambos casquetesunidos forman una super�cie cerrada. Al aplicar el teorema de la divergenciaa esta super�cie hay que tener en cuenta que las normales a ambas super�ciestienen la misma dirección (Fig. 27).A su vez, si S es una super�cie cerrada, lisa y orientable, siendo C una
curva sección de ella, podemos subdividir a la super�cie en dos regiones
75

76 CAPÍTULO 11. CAMPOS SOLENOIDALES. DISCONTINUIDADES
apoyadas en la curva. Como el �ujo del campo a través de S es nulo, la sumade los �ujos a través de los casquetes también lo será.
3) f 2 C1 es solenoidal ) el �ujo a través de las seciones de un tubo decampo es siempre el mismo.4) f 2 C1 es solenoidal, 9�(u; v)�f = �(u; v) grad u� grad v, siendo u; vlos parámetros que de�nen las lineas de campo de f:En este caso, div
��(u; v) grad u� grad v
�=�@�@ugrad u+ @�
@vgrad v
��(grad u�
grad v) = 0, puesto que tanto grad u como grad v son perpendiculares a(grad u� grad v).
5) f 2 C1 es solenoidal , 9U; V�f = grad U � grad V . Tomando U =R�(u; v)du y V = v, nos encontramos con el caso anterior.
6) f 2 C1 es solenoidal , 9g 2 C2�f = rot g: Si tomamos g = U grad V ,
tenemos que div f = div(rot g) = div(U grad V ) = 0. Por otra parterot g = rot
�U grad V
�= grad U � grad V = f:
11.3. Potencial vectorial de un campo
Cuando el campo vectorial f es solenoidal se de�ne el potencial vectorialcomo todo campo tal que g 2 C2�f = rot g. El potencial vectorial deun campo no está unívocamente determinado. Supongamos que exista unpotencial vectorial general h, tal que f = rot h y que, a su vez, existe una

11.3. POTENCIAL VECTORIAL DE UN CAMPO 77
Figura 11.1: Tubo de campo

78 CAPÍTULO 11. CAMPOS SOLENOIDALES. DISCONTINUIDADES
solución particular g con lo que f = rot g. Es evidente que rot(h � g) = 0.Si creamos h � g = grad�, entonces h = g + grad�. Es decir, el potencialvectorial está determinado salvo cierto vector que debe ser conservativo. Perotodo campo solenoidal siempre admite potencial vectorial.Existen diversos métodos para calcular el potencial vectorial. El más
común es buscar g a ojo. Más preciso es buscarlo a partir de las líneas decampo de f . Si estas líneas de campo vienen determinadas por U(yi) = a yV (yi) = b, hay que encontrar �(u; v)�f = �(u; v) grad u� grad v: Posteri-ormente se calcula U =
R�(u; v)du y V = v, con lo que g = U grad V:
Problema 50.Se da un plano en el EGO y una campo f solenoidal.1) Hallar el potencial vectorial g de f , de forma que g = (y1; y2)k, de�nidopor las ecuaciones difernciales que ha de cumplir .2) Demostrar que el campo permanece constante a lo largo de las líneasde campo de f:3) Relacionar
��f �� con grad :4) Si, además, f es irrotacional, encontrar la naturaleza de y la relaciónentre el potencial escalar V de f y . Comprobar que son parte real e imag-inaria de una función compleja.
Problema 51.Hallar la tracción que ejerce una lámina rectangular, plana y homogéneasobre una masa puntual unitaria exterior a la lámina. La situación de lamasa exterior se puede de�nir por los parámetros que se deseen.
11.4. Flujo de un campo solenoidal.
(Flujo de un campo solenoidal. con puntos singulares através de una super�cie cerrada.)Supongamos que tenemos un punto singular P aislado. En este caso,
si el punto es exterior a la región que encierra la super�cie, no afecta enabsoluto al �ujo. Si se aplica el teorema de la divergencia, la integral devolumen se extiende sólamente a la región interior a la super�cie, con lo queRRSf � ndS =
RRRdivfdV = 0:
11.4. FLUJO DE UN CAMPO SOLENOIDAL. 79
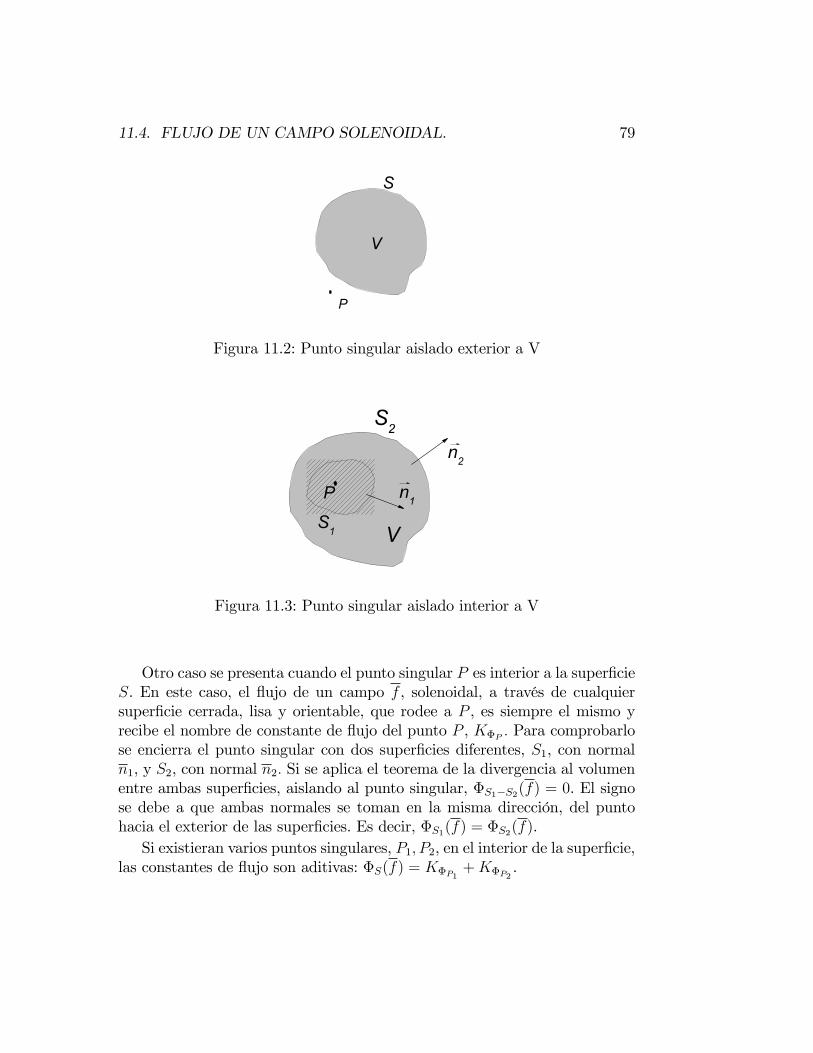
Figura 11.2: Punto singular aislado exterior a V
Figura 11.3: Punto singular aislado interior a V
Otro caso se presenta cuando el punto singular P es interior a la super�cieS. En este caso, el �ujo de un campo f , solenoidal, a través de cualquiersuper�cie cerrada, lisa y orientable, que rodee a P , es siempre el mismo yrecibe el nombre de constante de �ujo del punto P , K�P : Para comprobarlose encierra el punto singular con dos super�cies diferentes, S1, con normaln1, y S2, con normal n2: Si se aplica el teorema de la divergencia al volumenentre ambas super�cies, aislando al punto singular, �S1�S2(f) = 0. El signose debe a que ambas normales se toman en la misma dirección, del puntohacia el exterior de las super�cies. Es decir, �S1(f) = �S2(f).Si existieran varios puntos singulares, P1; P2, en el interior de la super�cie,
las constantes de �ujo son aditivas: �S(f) = K�P1+K�P2
.
80 CAPÍTULO 11. CAMPOS SOLENOIDALES. DISCONTINUIDADES
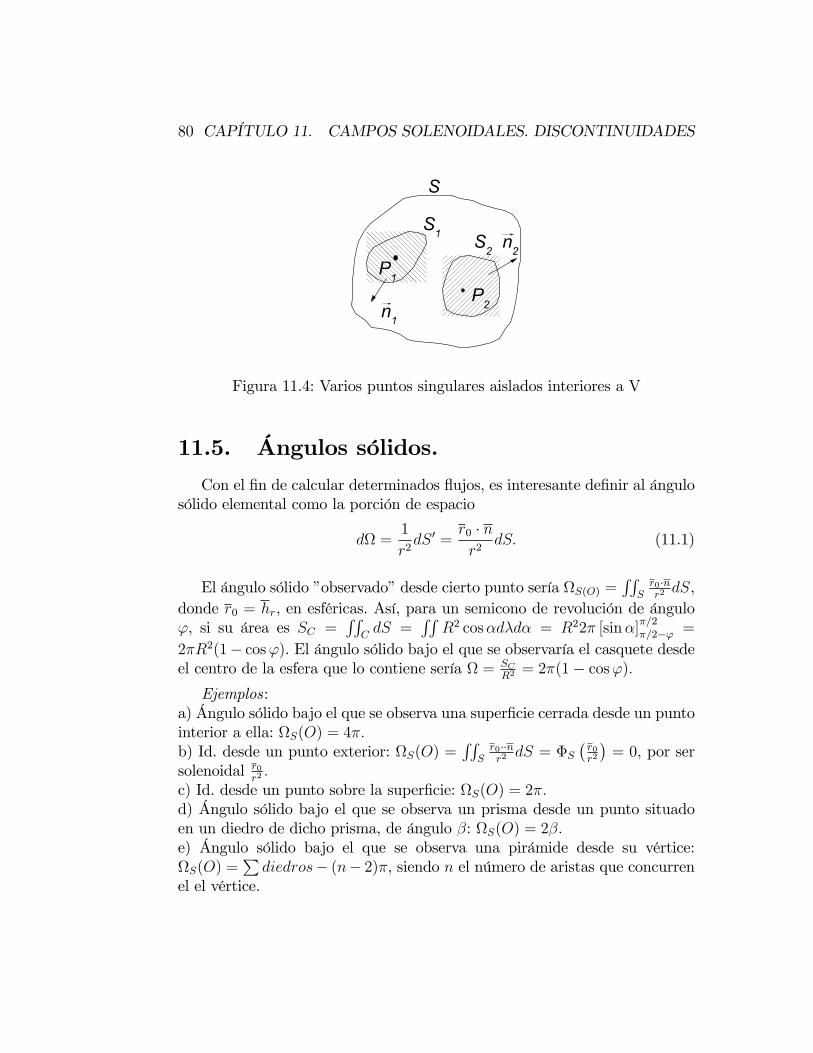
Figura 11.4: Varios puntos singulares aislados interiores a V
11.5. Ángulos sólidos.
Con el �n de calcular determinados �ujos, es interesante de�nir al ángulosólido elemental como la porción de espacio
d =1
r2dS 0 =
r0 � nr2
dS: (11.1)
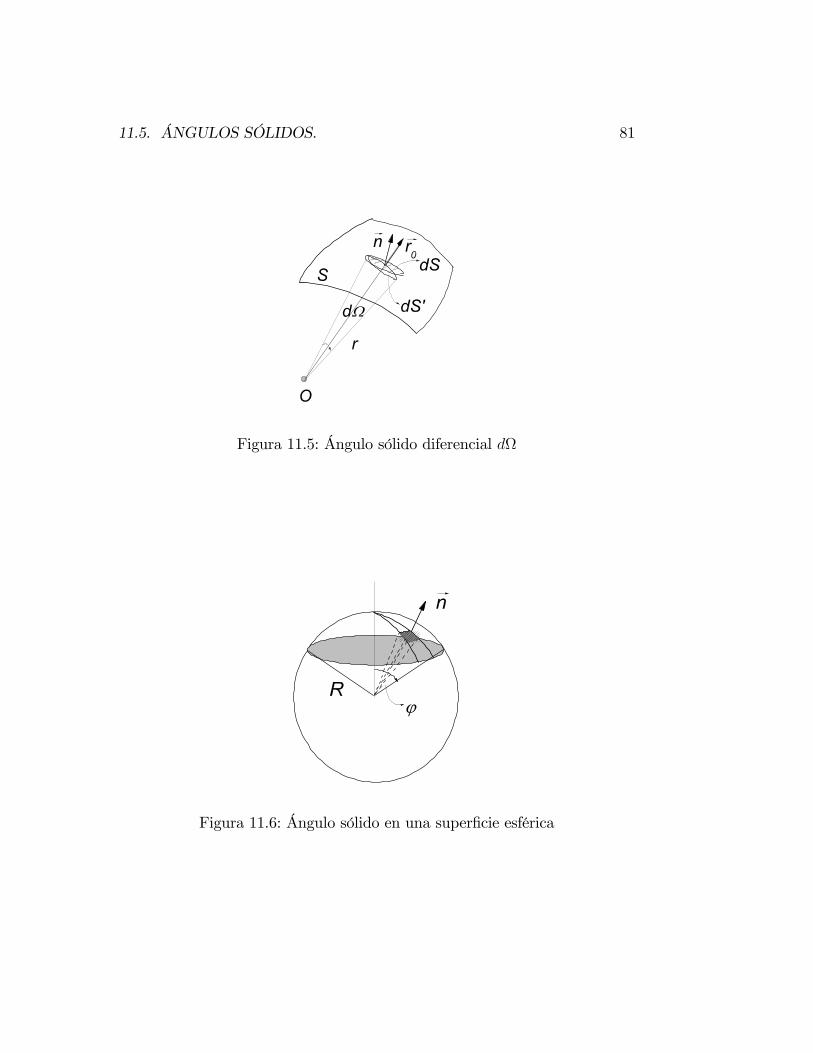
El ángulo sólido �observado�desde cierto punto sería S(O) =RRSr0�nr2dS,
donde r0 = hr, en esféricas. Así, para un semicono de revolución de ángulo', si su área es SC =
RRCdS =
RRR2 cos�d�d� = R22� [sin�]
�=2�=2�' =
2�R2(1� cos'). El ángulo sólido bajo el que se observaría el casquete desdeel centro de la esfera que lo contiene sería = SC
R2= 2�(1� cos'):
Ejemplos:a) Ángulo sólido bajo el que se observa una super�cie cerrada desde un puntointerior a ella: S(O) = 4�:b) Id. desde un punto exterior: S(O) =
RRSr0��nr2dS = �S
�r0r2
�= 0, por ser
solenoidal r0r2:
c) Id. desde un punto sobre la super�cie: S(O) = 2�:d) Ángulo sólido bajo el que se observa un prisma desde un punto situadoen un diedro de dicho prisma, de ángulo �: S(O) = 2�:e) Ángulo sólido bajo el que se observa una pirámide desde su vértice:S(O) =
Pdiedros� (n� 2)�, siendo n el número de aristas que concurren
el el vértice.
11.5. ÁNGULOS SÓLIDOS. 81
Figura 11.5: Ángulo sólido diferencial d
Figura 11.6: Ángulo sólido en una super�cie esférica
82 CAPÍTULO 11. CAMPOS SOLENOIDALES. DISCONTINUIDADES
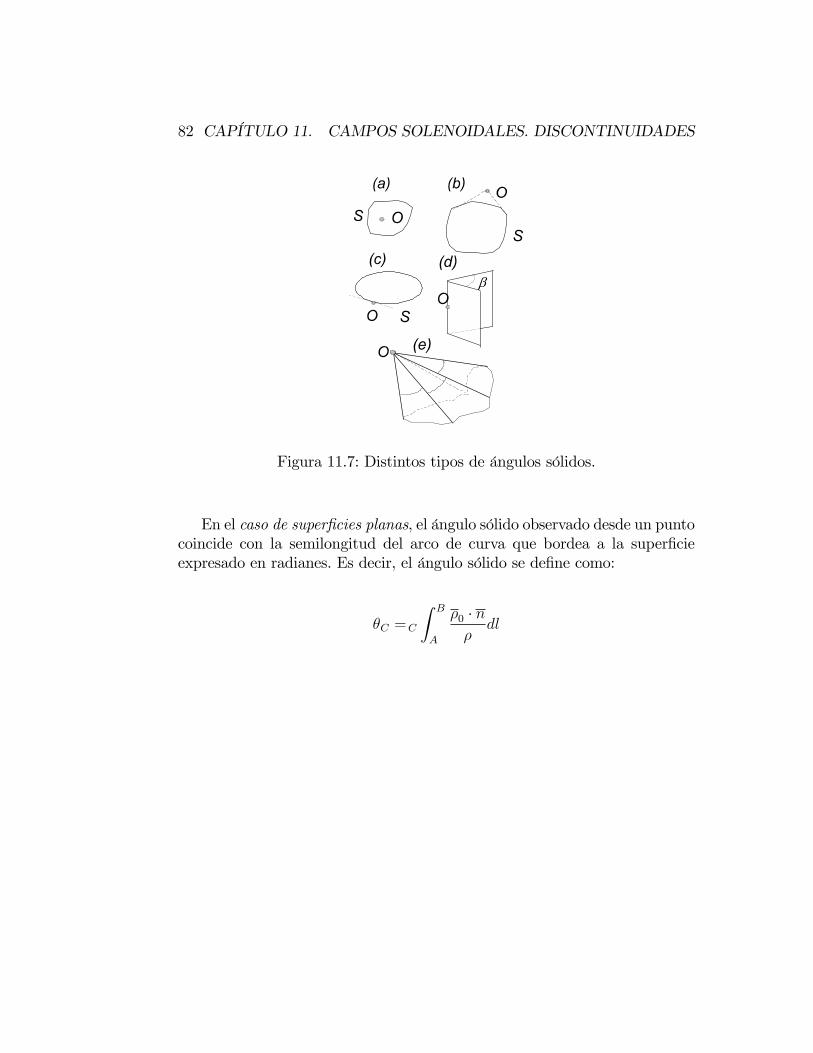
Figura 11.7: Distintos tipos de ángulos sólidos.
En el caso de super�cies planas, el ángulo sólido observado desde un puntocoincide con la semilongitud del arco de curva que bordea a la super�cieexpresado en radianes. Es decir, el ángulo sólido se de�ne como:
�C =C
Z B
A
�0 � n�
dl

11.5. ÁNGULOS SÓLIDOS. 83
Figura 11.8: Elemento de ángulo sólido

84 CAPÍTULO 11. CAMPOS SOLENOIDALES. DISCONTINUIDADES
Capítulo 12
CAMPOS CENTRALES
12.1. De�nición.
Un campo escalar U se llama central, de centro O, si U = U(r):
Un campo vectorial f se llama central, de centro O, si f = f(r):
Es decir, los campos sólo dependen de la distancia a partir de un punto. Lade�nición es extensible a cualquier tipo de campo.
Como propiedad fundamental, f central ) f conservativo . Dado que f =
f(r)r0 ) f = grad�Rf(r)dr + C
�, pues grad U(r) = dU
drgrad r = dU
drr0,
donde U(r) =Rf(r)dr: Como r0 es irrotacional, f central 2 C1 ) f irrotacional .
12.2. Expresión general para campos centralesarmónicos.
Para campos centrales que, además, sean armónicos, siempre pueden econ-trarse expresiones analíticas generales.
12.2.1. Para un escalar U(r);
4U(r) = 0) div(grad U) = div�dUdrr0�= d2U
dr2+ dU
dr2r= 0:
85

86 CAPÍTULO 12. CAMPOS CENTRALES
Conviene recordar que, en esféricas, div r0 = div hr =1
r2 cos�@@r(r2 cos�) = 2
r:
Por lo tanto, llamando U 0r =dUdr; tenemos que U 00r
U 0r= �2
r) lnU 0r = �2 ln r +
ln a0 ) U 0r =a0
r2)
U =a
r+ b (12.1)
en el EGO. Es cualquier otro espacio se sigue el mismo método, teniendo encuenta que pueden existir complicaciones adicionales en el álgebra.En el plano, como div r0 = h� =
1�@@�(�) = 1
�) 4U = div (U 0� �0) =
U 00� +U 0��= 0:
12.2.2. Para un campo vectorial f
Si f es armónico, f = grad U , siendo U armónico. Por lo tanto, la formamás general de f será f = grad
�ar+ b�= � a
r2r0 )
f =k
r2r0: (12.2)
En el plano, f = grad (�a ln �+ b) = a��0.
Problema 52.Sea en el EGO el campo f =
�41r
�r + r
r3: Calcular:
1) Naturaleza de f , discontinuidades y potenciales.2) Flujo de f a través de las esferas x2 + y2 + (z � z0)
2 = 25, en función dez0:3) Flujo de f a través del casquete x2 + y2 + (z � 3)2 = 25, z � 0:
Problema 53.Las partes real e imaginaria de la función de variable compleja f(z) =�4�aln z�a
z+a(con �; a 2 R+) son las funciones potenciales U y V de los campos
u y v. Obtener:1) U; V; u y v:2) Divergencias y rotacionales de u y v, así como las discontinuidades.3) Expresión de w = u � v:4) Circulación de u y v a lo largo de las curvas:4.1. (x�a)
2
a2+ y2
b2= 1; b > 0:
4.2. (x�a)2
a2+ (y�b)2
a2+b2= 1:
5) Si a se hace tender a 0, hallar, en el límite:

12.2. EXPRESIÓNGENERALPARACAMPOSCENTRALES ARMÓNICOS.87
5.1. U; V; u y v:5.2. Dibujar las super�cies equipotenciales y líneas de campo de u y v:

88 CAPÍTULO 12. CAMPOS CENTRALES
Capítulo 13
DESCOMPOSICIÓN DEHELMHOLTZ.
(Y ECUACIONES DE INTERÉS)
13.1. Teorema de la decomposición de Helmholtz.
Todo campo vectorial, conservativo y central, f 2 C1, perteneciente alEGO, puede descomponerse en la suma de un campo irrotacional y otrosolenoidal. En efecto, tenemos que, si f es conservativo y central, div f = 4U ,donde, en principio, U es desconocido. La anterior ecuación es de Poisson,que admite siempre una solución particular U�, de tal forma que
f =�grad U�
�+�f � grad U�
�; (13.1)
donde el primer sumando es irrotacional y el segundo solenoidal. Para elprimer sumando ya hemos visto hemos visto en el capítulo anterior por quées irrotacional. En cuanto al segundo, div
�f � grad U�
�= div f �4U� =
div f � div f = 0.
13.2. Ecuación de Poisson
Para cualquier distribución volumétrica, ya sea de carga o de masa con den-sidad de carga o masa 2 C1, en el interior de la distribución se cumple
89
90 CAPÍTULO 13. DESCOMPOSICIÓN DE HELMHOLTZ.
que divf = �4U = 4�k , donde U es el potencial escalar de f y k es unaconstante que depende del tipo de problema, coulombiano o newtoniano.
13.3. Ecuación de Laplace
En cualquier tipo de distribución, con densidad 2 C0, y fuera de dichadistribución de carga o de masa, se cumple que divf = �4U = 0:
Problema 54.Determinar qué posible distribución de masas newtoniana produce los po-tenciales V1 = 4az
r3; para r > a y V2 = 3a2+4az�3r3
a3, para r < a, siendo a
constante.
Problema 55.Se da un triángulo equilátero de lado a y masa super�cial de densidad �constante. Calcular el campo y el potencial creado en un punto genérico dela recta ortogonal a su centro, en función de la distancia medida sobre esarecta.
Problema 56.Efectuar la descomposición de Helmholtz, dando la componente solenoidal,de�nida por un potencial vectorial solenoidal, de los campos f = xyz i +xy j + z k y f = xy i+ x2y j + zy2 k:
Problema 57.Dado el campo del EGO f = �2�z ln � h
�, hacer un descomposición de
Helmholtz.

Capítulo 14
ESPACIOS DE RIEMANN
14.1. Variedad real n-dimensional y p-diferenciableV pn�.
Es un conjunto de elementos, llamados puntos, que se pueden poner encorrespondencia biunívoca con n variables reales (u1; � � � ; un), llamadas sis-tema de coordenadas, y tales que si se cambia a otro sistema (u01; � � � ; u0n),siempre existe una relación u� = u�(u0�) 2 Cp, exigiéndose que p � 2.Se conoce como región de regularidad de un sistema de coordenadas
(u1; � � � ; un) al dominio de variación en el cual existe la correspondencia bi-unívoca con los puntos de Vp
n�.
14.2. Espacio de Riemann R�n de dimensión n
Es una Vpn� en la que se introduce una métrica elemental, �jado un
(u1; � � � ; un), mediante la forma cuadrática du1 � � � � � dun en cada punto de lavariedad:
(ds)2 = g�� du�du�; (14.1)
donde g�� son n2 funciones de u1; � � � ; un.
14.2.1. Axiomas:
91

92 CAPÍTULO 14. ESPACIOS DE RIEMANN
Figura 14.1: Superfície esférica como espacio de Riemann. El interior de laesfera no existe en este caso.
1) g��(u1; � � � ; un) 2 C12) jg��j 6= 03) (g��) ha de ser siempre simétrica
14.2.2. Puntos singulares:
Son aquellos en los que no se cumple alguno de los axiomas.
14.3. CLASIFICACIÓN DE R�n
En un puntoM 2 R�n, se llama índice de R�n al rango de la matriz (g��)M .En dicho punto,R�n es propiamente riemanniano o elíptico si el índice es n (el máximoposible).R�n es impropiamente riemanniano o hiperbólico si el índice es menorque n.Para que, al pasar de un punto a otro de R�n cambie el índice, se ha de pasarpor un punto singular de R�n.

14.4. EJEMPLO FUNDAMENTAL DE R�N . 93
14.3.1. Cambio de los coe�cientes de la forma cuadráti-
ca (ds)2; g��;
al cambiarse el sistema decoordenadas
Si (ds)2 =�g�� du
�du�
g0ij du0idu0j
)
(ds)2 = g��du�
du0idu�
du0j du0idu0j )
.
g0ij =du�
du0idu�
du0jg��:
Es decir, si de�nimos en Vpn� un cambio de coordenadas u
� ! u0�, al matriz
jacobiana será J =�@u�
@u0�
�) J�1 =
�@u0�
@u�
�, donde siempre se toma � como
�la y � como columna, con lo que,
G0(u0�) = J G(u�) JT : (14.2)
14.4. Ejemplo fundamental de R�n.
Es cualquier super�cie del EGO. Es decir, el lugar geométrico de lospuntos dependientes de dos mismos parámetros mediante un funcional:8<:
y1 = y1(u1; u2)y2 = y2(u1; u2)y3 = y3(u1; u2)
9=; 2 C2
En efecto, la super�cie cumple con:1) Es una V p
2�, suponiendo que los cambios admitidos u0� = u0�(u�) 2 C2, es
decir, p = n:
2) Existe (ds)2 =Sg��du
�du�, primera forma cuadrática fundamental de lasuper�cie, que es la métrica elemental restringida de la del EGO y que cumplelos tres axiomas.De�nimos la matriz M(yi;u�) =
�@yi
@u�
�, matriz 2� 3, con rango r(M) = 2,
que no es una matriz jacobiana. En el EGO, (ds)2 = dr�dr = (dyi)hi(dyj)hj =Egijdy
idyj. El índice E sobre el tensor métrico hace referencia a que es elcorrespondiente al espacio geométrico ordinario completo. Si nos restringimosa la super�cie S, nos encontramos con que:

94 CAPÍTULO 14. ESPACIOS DE RIEMANN
(ds)2 =Egij(y(u))dy
idyj =Egij(y(u))
@yi
@u�@yj
@u�du�du�, donde
Egij(y(u))
@yi
@u�@yj
@u�
son n2 funciones que llamaremosSg��(u), que cumplen los axiomas y que
pueden expresarse en forma matricial como:
S
G(u�) =M(yi;u�)
�E
G(yi)
�MT(yi;u�); (14.3)
cumpliéndose:
1)Sg��(u) 2 C1
2)���Sg��(u)��� 6= 0
3)S
G(u�)es simétricaEn una super�cie S podemos de�nir los vectores tangente a ella como:t1 =
@r@u1
= @yi
@u1hi;
t2 =@r@u2
= @yi
@u2hi;
por lo que t� =@yi
@u�hi )
�t�=M(yi;u�)
�hi) t�� t� =
@yi
@u�hi � @y
j
@u�hj =
@yi
@u�@yj
@u�Egij =
Sg�� )
S
G(u�) = G(t1;t2): (14.4)
14.5. Curva y longitud de un arco de curvaen R�n.
Una curva en R�n es el lugar geométrico de los puntos de R�n tales que,
�jado un u1; � � � ; un, se cumple que ui = ui(u) 2 C1, siendo u, en principio,un parámetro cualquiera.Longitud de arco de curva:
La longitud de un arco sobre una curva C � fui = ui(u)g, entre dos puntos(A;B), se de�ne como:
dC(AB) =
Z B
A
ds =
Z u(B)
u(A)
rg��(u)
du�
du
du�
dudu: (14.5)
Se ha de tener siempre presente que la distancia sólo está de�nida a lo largode un arco de curva.
14.6. SÍMBOLOS DE CHRISTOFFEL EN R�N . 95
14.6. Símbolos de Christo¤el en R�n.
(relativos a un sistema curvilíneo u�).Se de�nen exactamente igual que para un espacio preeuclídeo o euclídeo
y tienen la mismas propiedades. Es decir,
5.1) �ij;k = 12
�@gjk@ui
+ @gik@uj
� @gij@uk
�5.2) �ij:k = gkl �ij;l5.3) Propiedades:5.3.1) �ij;k y �ij:k son n3 funciones de punto. No tienen por qué ser derivables.5.3.2) �ij;k y �ij:k son simétricas en los índices 10 y 20:5.3.3) Identidades de Ricci:5.3.3.1) @gij
@uk= �kj;i + �ki;j
5.3.3.2) @gij
@uk= �g�j��k:i � gi���k:
j
5.4) �i�:� =@ ln
pg
@ui= 1p
g
@pg
@ui= 1
2g@g@ui
14.7. Cambio de sistema curvilíneo y símbo-los de Christo¤el.
El resultado es análogo al producido en En� , pero no se puede seguir elmismo procedimiento para demostrarlo. En resumidas cuentas, al hacer elcambio de sistema curvilíneo se demuestra que los símbolos de Christo¤el notienen carácter tensorial.
14.8. Espacio de Riemann R�n, métricamenteaplicable sobre un En� :
Es un R�n en el que existe un sistema ui tal que las componentes del
tensor métrico correspondiente, g��, son constantes. Este sistema ui conocecomo sistema cartesiano, por deformación del lenguaje. Como consecuencia,R�n es métricamente aplicable en En� , 9ui��ij;k = �ij:k = 0. Otra forma dede�nirlos es R�n es métricamente aplicable en En� , 9ui�(ds)2 = g��du
�du�
puede ser la forma cuadrática de un En� .

96 CAPÍTULO 14. ESPACIOS DE RIEMANN
Figura 14.2: Superfície cónica como R�2 métricamente aplicable o superfíciedesarrollable.
En el caso particular de un R�2, es decir, una super�cie S, este es métri-camente aplicable en E2� , S es desarrollable. En otras palabras, se puedeencontrar un sistema curvilíneo que represente a la super�cie S en el que lascomponentes de g�� correspondiente son constantes. Encontrar el sistema ui
no es obvio. Como ejemplo, podemos analizar el caso de una super�cie cónicaque, a priori, sabemos que es desarrollable.
Supongamos que elegimos el sistema ui siguiente, relacionado con las coor-denadas esféricas de E3� :8<:
r = u1
� = u2
� = k, donde hemos �jado una coordenada. En este caso,
S
G(u�) =M(yi;u�)
�E
G(yi)
�MT(yi;u�) =�
1 0 00 1 0
�0@ 1 0 00 (u1)2 cos2 k 00 0 (u1)2
1A0@ 1 00 10 0
1A =�1 00 (u1)2 cos2 k
�:
Este sistema, como vemos, no nos sirve, pues las componentes del tensormétrico no son constantes, a pesar de que sabemos que una super�cie cónicaes desarrollable. Podemos probar con las coordenadas cilíndricas:

14.9. GEODÉSICAS. 978<:� = u1
� = u2
z = u1 tan k, que también describe una super�cie cónica. En este caso se
obtieneS
G =
�cos2 k 00 (u1)2
�, que tampoco son constantes. Como podemos
apreciar, el determinante de los tensores métricos son iguales. El caso delcono es bastante singular. Dejamos a la imaginación del lector el encontrarel sistema adecuado.
14.9. Geodésicas.
La distancia más corta entre dos puntos sobre un espacio de Riemannrecibe el nombre de geodésica. En física, corresponden a las trayectorias quesigue un móvil con aceleración nula. Sus ecuaciones se obtienen de las dela longitud de un arco de curva C = Cfu�(s)g, ya de�nida, aplicando elprincipio de mínima acción:
@2u�
@s2� �� :�
@u�
@s
@u
@s= 0: (14.6)
Sus consecuencias y utilidad son notorias en la Relatividad General, comopodremos comprobar. Por ahora, baste con su de�nición.
Problema 58.En una variedad real V p
2� se de�ne la distancia elemental en cada punto por laexpresión (ds)2 = v2 cosh 2u(du)2 + 2v sinh 2udadv + cosh 2u(dv)2, habiendo�jado previamente un sistema de coordenadas u; v. Se pide:1) Símbolos de Christo¤el y clasi�cación del espacio de Riemann.2) Estudiar si la métrica dada puede ser la de un plano del EGO, obteniendo,en caso a�rmativo:2.1. Expresión de los vectores naturales del sistema (u; v) respecto aun sis-tema cartesiano ortonormal (O; i; j), sabiendo que, en dicho sistema, (hu)O =j, con O(u = 0; v = 1):2.2. Relaciones del sistema (u; v) con el cartesiano del apartado anterior.
Problema 59.En una variedad real V p
2� se de�ne la distancia elemental en cada puntopor la expresión (ds)2 = (du1)2+(u1)2(du2)2. Estudiar si puede ser la métricade un plano del EGO, hallando el sistema cartesiano correspondiente.

98 CAPÍTULO 14. ESPACIOS DE RIEMANN
Figura 14.3: La distancia más corta entre A y B sobre la super�cie alabeada(espacio de Riemann R�2) no es la línea recta de trazos, pues esta no pertenecea dicho espacio. Sería la curva gruesa, camino que recorrería una hormiga máso menos inteligente.
Capítulo 15
CAMPOS TENSORIALES RC,RI y EI.
(DERIEMANN-CHRISTOFEL, RICCIYEINSTEIN).
15.1. Campo tensorial de Riemann-Christo¤el.
Dado un campo tensorial riemanniano T , de primer orden, arbitrario,covariante, en R�n, procedamos a calcular, en un sistema u
i cualquiera, lacantidad ti;jk�ti;kj, es decir, la diferencia entre sus dobles derivadas covari-antes cruzadas:ti;j =
@ti@uj� t��ij:
� = aij:
ti;jk= aij;k=@aij@uk
� a�j�ik:� � ai��jk:
� =@2ti
@uj@uk� @t�
@uk�ij:
� � t�@�ij :
�
@uk� �ik:�
�@t�@uj� t���j:
���
��jk:��@ti@u�
� t��i�:��:
Por su parte,ti;kj =
@2ti@uk@uj
� @t�@uj�ik:
� � t�@�ik:
�
@uj� �ij:�
�@t�@uk
� t���k:���
��kj:��@ti@u�
� t��i�:��:
Por lo tanto, tenemos que, 8ui,ti;jk�ti;kj =
�@�ik:
�
@uj� @�ij :
�
@uk+ �ik:
���j:� � �ij:���k:�
�t�:
Para que las derivadas covariantes cruzadas sean iguales, la cantidad en-tre paréntesis ha de ser nula. Precisamente, esa cantidad corresponde a las
99
100 CAPÍTULO 15. CAMPOS TENSORIALES RC, RI Y EI.
componentes del tensor de Riemann-Christo¤el Rij k|{z}:l. Dado que T es ar-
bitrario, aplicando la primera Ley del Cociente se comprueba que Rij k|{z}:l
tiene naturaleza tensorial homogénea, de cuarto orden, riemanniano, cova-cova-cova-contravariante. Dada la construcción del campo tensorial, éste eshemisimétrico en los índices segundo y tercero, peculiaridad que se reseñaen la notación con una llave. Existen varias notaciones alternativas del ten-sor, como Rl:ijk, donde la hemisimetría corresponde a los índices primero yúltimo. Por lo tanto,
R� C = Rij k|{z}:l = @�ik:
l
@uj� @�ij:
l
@uk+ �ik:
��j�:l � �ij:��k�:l: (15.1)
La primera consecuencia que se desprende, como ya hemos comentado, es queR� C , 8T , riemanniano, de primer orden, T; ; es simétrico en los índicessegundo y tercero.Es bastante corriente el usar la forma totalmente covariante del campo
tensorial R� C. Sus componentes son:Ri jk|{z} l = glmRij k|{z}:m =
@glm�ij :m
@uj� @glm�ij :
m
@uk� @glm
@uj�ik:
m + @glm@uk�ij:
m + �ik:��j�;l��ij:��k�;l :
Utilizando las identidades de Ricci a las derivadas de glm, las reescribimos enfunción de las �kl;m y �km;l :
Ri jk|{z} l = @�ik;l
@uj� @�ij;l
@uk+ �ij:
��kl;� � �ik:��jl;�; (15.2)
pero también se usa la forma Rlijk, con hemisimetría en los índices primeroy último.
15.2. Simetrías y hemisimetrías de R� C:
Hemos mencionado determinada hemisimetría de construcción en el ten-sor de Riemann-Christo¤el. En general,2.1). R�C es hemisimétrico en los índices 2o y 3o
2.2). R�C es hemisimétrico en los índices 1o y 4o

15.3. CAMPO TENSORIAL DE RICCI. 101
2.3). R�C es simétrico en los grupos de índices 1o � 4o y 2o � 3o, es decir,Ri jk|{z} l = R
j il|{z} k2.4). R
i jk|{z} l +Ri kl|{z} j +R
i lj|{z} k = 0La consecuencia inmediata es que casi todas las comoponentes de R�C sonnulas o linealmente dependientes de alguna no nula. Los casos más evidentesson en R�2 y R
�3:
En R�2 tenemos que Ri jk|{z} l = �12ik �12jlR1 12|{z} 2. La única componente lin-
ealmente independiente es la R1 12|{z} 2. Si hiciéramos un cambio de base,R01 12|{z} 2 = jJ j2R1 12|{z} 2: También se tiene que Ri jk|{z} l = �il12�
jk12R
1 12|{z} 2 )R01 12|{z} 2 = jJ j�2R1 12|{z} 2 y queRi: jk|{z}:l ) R01:
12|{z}:2 = R1:12|{z}:2, oRi: jk|{z}:l )
R01: 12|{z}:2 = R1: 12|{z}:2. Es decir, estas dos formas últimas son de componentesisotrópicas. Por otra parte, también tenemos que, 8ui se cumple que:
R1:12|{z}:2 = R1: 12|{z}:2 =
R1 12|{z} 2g
= gR1 12|{z} 2:
En cualquier problema planteado en R�2 el campo tensorial R�C puede,por tanto, obtenerse con una sola componente. Si nos dan la forma cuadráticaelemental (ds)2 = g��du
�du�, se calculan los símbolos de Christo¤el de ambasespecies y, con ellos,R1 12|{z} 2 = @�12;2
@u1� @�11;2
@u2+ �11:
��22;� � �12:��12;�, con � = 1; 2, con lo que
Ri jk|{z} l = Rlijk =
0BB@�0 00 R1122
� �0 R11220 0
��
0 0�R1122 0
� ��R1122 00 0
�1CCA :
En R�3 tenemos que las únicas seis componentes linealmente independi-entes son: R1 12|{z} 2; R1 13|{z} 2; R1 23|{z} 2; R1 13|{z} 3; R1 23|{z} 3; R2 23|{z} 3.15.3. Campo tensorial de Ricci.
Se de�ne como la contracción en los índices tercero y cuarto del campotensorial R� C, es decir,
102 CAPÍTULO 15. CAMPOS TENSORIALES RC, RI Y EI.
RI = C34 [R� C] : (15.3)
Si recordamos cómo se construyó el tensor R�C, el tensor de Ricci está direc-tamente relacionado con la laplaciana de cierto campo tensorial de segundoorden, en cualquier dimensión. Más adelante veremos las consecuencias deello. El tensor de Ricci, RI, es simétrico:Rij = R
i jk|{z}:k = gklRi jk|{z} l y Rji = gklR
j ik|{z} l = gklRi jl|{z} k = Rij:
15.4. Componentes de la curvatura escalar R.
4.1). Se de�ne como curvatura escalar de un espacio de Riemann R�n a lacontracción del tensor de Ricci:
R = C [RI] : (15.4)
Es decir, R = C34;23 [R� C]. Por lo tanto, la curvatura es calar es un campoescalar de componentes R = Ri:
i = gijRij:
4.2). Se de�ne como curvatura de Gauss o total, en un R�2, a la cantidad� = �R1122
g. Es fácil comprobar que R = �2�.
15.5. Campo tensorial de Einstein.
Por de�nición, el campo tensorial de Einstein EI es:
EI = RI � 12R:G: (15.5)
que es un campo tensorial riemanniano de segundo orden. Tiene las siguientespropiedades:5.1. Es simétrico5.2. C13 [EI; ] = C23 [EI; ] =
5.3. En R�2, EI = Como veremos más adelante, el campo tensorial de Einstein no es más queuna forma generalizada de la Laplaciana.
15.6. CAMPO TENSORIAL DE WEYL. 103
15.6. Campo tensorial de Weyl.
Se de�ne como Crsmn = Rrsmn � 12grmRns +
12grnRms +
12gsmRnr�
12gsnRmr� 1
6grngmsR+
16grmgnsR: En consecuencia, grmCrsmn = 0: Si Crsmn =
0, en cualquier punto del espacio de Riemann, automáticamente la métrica dedicho espacio es diagonalizable, correspondiendo a la de un universo plano.
15.7. Identidades de Bianchi.
En cualquier espacio de Riemann se cumplen las relaciones, de bastanteutilidad a la hora de operar con los campos tesoriales de Riemann-Christo¤el,conocidas como identidades de Bianchi:Ri jk|{z} l;m +R
i km|{z} l;j +Ri mj|{z} l;k = 0Ri: jk|{z} :l;m+Ri: km|{z} :l;j +Ri: mj|{z} :l;k= 0La demostración de las anteriores identidades es bastante laboriosa, yendo
más allá de las pretenisones de este texto, por lo que la omitiremos.
15.8. Ecuación de Einstein.
La ecuación de Einstein relaciona al campo tensorial de Ricci con la cur-vatura del espacio riemanniano donde esté de�nido:
RI = �G: (15.6)
Esta ecuación puede veri�carse o no. Caso de veri�carse, se demuestra, me-diante la segunda ley del cociente, que � es un campo escalar. Contrayendola ecuación de Einstein es fácil comprobar que
� =R
n: (15.7)
Problema 62.En un R�2, demostrar que se veri�ca la ecuación de Einstein. Demostrar queEI = . Relacionar el campo escalr � co los campos tensoriales de Riemann-Christo¤el y Ricci, así como con la curvatura escalar y la de Gauss.
Problema 63.

104 CAPÍTULO 15. CAMPOS TENSORIALES RC, RI Y EI.
En el EGO se dan los sitemas (0; x; y; z) y (0; �; �; z). Se detalla una super�cieS por [(� = u; � = v; z = u2) o (x = u0; y = v0; z = u02 + v02)] : Calcular:1) Campo tensorial R� C en (u; v):2) Campo tensorial R� C en (u0; v0):3) Componetes de todas las especies del campo tensorial RI en (u0; v0):4) Curvaturas escalar y total.5) Componentes de RI; en (u; v):6) Componentes de (R� C) ;en (u; v):

Parte II
Teoría General de laRelatividad
105


Capítulo 16
RELATIVIDAD GENERAL
16.1. Principio de equivalencia.
La Teoría General de la Relatividad (TGR) rechaza la idea newtonianade la existencia de un observador privilegiado, el cual está en reposo enel espacio absoluto (desde el punto de vista de este observador las leyesfísicas se escribirían en su forma más simple). La TGR supone que las leyesson idénticas para la misma clase de observadores, en sistemas de referenciaque se desplacen con movimiento de traslación uniforme, unos respecto aotros. Esto implica la existencia real, en sí, de los espacios, en los cualespueden de�nirse sistemas de referencia. Es decir, los espacios tienen su�cienteestructura interna.Sin embargo, la experiencia y evidencia sugieren que los espacios no
pueden de�nirse así sin más, sino por medio de distancias entre cuerpos.Un espacio físico no es más que un amasijo de todos los posibles (in�nitos)sistemas de coordenadas. En realidad, los sistemas están relacionados con lasdistribuciones de materia existentes en el Universo, y no tienen sentido fuerade dicha materia. En resumidas cuentas, según la perspectiva de Einstein,las leyes de la física deberían poderse expresar de forma independiente de lossistemas de referencia. Las leyes deberían ser idénticas para todos los obser-vadores, y no para unos privilegiados del PSOE o CC. Este es el Principiode la Relatividad General. Por supuesto, que duda cabe de que, matemática-mente, unos sistemas son más convenientes que otros a la hora de trabajarcon ellos.El Principio de equivalencia viene a decir además que, para un ob-
107
108 CAPÍTULO 16. RELATIVIDAD GENERAL
servador, es igual que su medio de transporte esté siendo acelerado o que loesté un sistema de referencia �jo en dicho medio de transporte, respecto deotro inercial. En otras palabras, un individuo en un ascensor en caida libre(después de que se ha roto el cable) siente lo mismo que un si estuviera enuna nave sin aceleración. Si el ascensor estuviera parado en el suelo, el sujeto,sometido tan sólo a la atración gravitatoria (su peso), experimentaría la mis-ma sensación que si estuviera en una nave sometida a una aceleración g. Estonos indica que su aceleración es independiente de la masa de las partículassobre las que actúa. Pero no ocurre así con la fuerza, como podremos compro-bar. La equivalencia entre inercia y gravitación fué la que indujo a Einsteina pensar que es el espacio el que se deforma por la acción de los campos,generados por masas u otros entes. Esto también le indujo a establecer que,al igual que los campos electromagnéticos (relatividad especial), la acción adistancia de los campos gravitatorios no era instantánea.
16.2. Métrica debida a un campo débil: elcampo gravitatorio.
Supondremos que el universo está con�gurado por una distribución con-tinua de masa o materia, aunque no necesariamente uniforme. Si la distribu-ción de masas no está en reposo, los sistemas cartesianos no son de utilidad.Cada suceso viene dado por cuatro coordenadas y�con dimensionalidad es-pacial. En este universo �cticio, en cada punto existe un reloj que no estásincronizado con el resto de in�nitos relojes correspondientes a los demáspuntos. Pero dos relojes in�nitamente próximos tienen horas muy parecidas.El universo es un S4 � R�4.Dos sucesos in�nitamente próximos se producirían en y� e y� + dy�, cor-
respondiéndoles tiempos t y t+ dt que, en tiempos propios, están separadospor
d� 2 = dt2 � 1
c2(dyi)2: (16.1)
Como norma general, los índices en caracteres griegos corresponden a R�4 ylos latinos a E�3 .Si de�nimos como intervalo elemental del universo a
ds2 = �c2d� 2 = (dyi)2 � c2dt2 = g��dy�dy�; (16.2)

16.3. MOVIMIENTODEUNAPARTÍCULA LIBRE ENUNCAMPOGRAVITATORIO.109
la métrica de dicho universo sería
g�� =
0BB@1 0 0 00 1 0 00 0 1 00 0 0 �c2
1CCA (16.3)
Este es el espacio de Minkovski, sucesor del de Lobachetsky, y que no es másque un espacio de Riemann. Existe la alternativa de tomar relojes normales ycorrientes (es un decir), con ds
iccomo tiempo entre dos sucesos. Habitualmente
se trabaja con cuadrivectores de R�4. Es decir, v� = (c; v), etc. Dado que ct
es una coordenada más, el parámetro con el que es costumbre trabajar, porser constante, es el intervalo del Universo s. En dicho caso, de�nimos comovelocidad unitaria a:
u� = dy�
ds= dy�
dtdtds= ( cdt
ds; u) = (c; v) = c(1; �):
16.3. Movimiento de una partícula libre enun campo gravitatorio.
Es el caso más simple que se puede analizar. Vamos a partir del intervaloelemental ds = (v2�c2)1=2dt, con v = cte. Es decir, estamos lejos de cualquierdistribución de masa que pueda afectar al movimiento de la partícula (o sea,no hay campos). En este caso, d2yi
ds2= 0 = d2t
ds2. Esta ecuación determina
una familia de líneas del universo correspondiente a las trayectorias de lapartícula libre respecto a un sistema localmente inercial. Desde cualquierotro sistema de referencia en movimiento, la ecuación del movimiento de lapartícula viene descrita por
d2y�
ds2+ �� :
�dy�
ds
dy
ds= 0; (16.4)
que, como ya hemos visto, es la ecuación de una geodésica, válida paracualquier sistema de referencia. Para g�� constantes, esta ecuación coincidecon la anterior, es decir, g11 = g22 = g33 = 1; g44 = �c2, siendo nulaslas demás componentes cuando no hay campos. En el caso general, las g��vienen determinadas por los campos existentes. Cuando estos elementos de lamétrica no pueden ponerse como constantes nos encontramos con los camposgravitatorios irreducibles (no cartesianos). En caso contrario tendríamos un
110 CAPÍTULO 16. RELATIVIDAD GENERAL
sistema reducible (cartesiano). Aún en ellos, en regiones in�nitesimales deluniverso en torno a nuestra partícula, la trayectoria es casi una línea recta,un sistema localmente inercial. Se puede generalizar al movimiento en caídalibre de partículas en cualquier campo gravitatorio siempre que conozcamoslas g��. En sistemas casi reducibles en entornos muy pequeños, los movimien-tos son casi uniformes. En este caso se dice que los sistemas coordenados sonde çaída localmente libre". Este es el caso de los campos gravitatorios gener-ados por masas como la de la Tierra, las cuales pueden considerarse bastantepequeñas.
16.4. Ley de Einstein de la gravitación.
Según la mecánica newtoniana, el campo gravitatorio que existe en cualquierregión del espacio viene determinado por la distribución de materia que hayaen dicha región. Esto indica que el tensor métrico del universo, que va a de-terminar la forma del universo, y que, como hemos visto, está íntimamenterelacionado con el campo gravitatorio, podría calcularse si se conociese la dis-tribución de materia en todo tiempo y lugar. Es decir, cualquier tensor quedescriba dicha distribución de materia debería estar relacionado de algunamanera con el tensor métrico. Uno de estos tensores es el de energía-impulso,T��,
T�� = �00v�v�; (16.5)
con �00 = � (1� v2=c2) = �= 2.En general, Tij = pij = �vivj = givj, con gi = �vi densidad de momento.
Así Ti4 = T4i = icpi; T44 = �c2� y Tij;i= div Tij = 0 en sistemas aislados.La última expresión encierra la ecuación de conservación de la densidad demateria.A �fortiori� se introduce T�� = �g��, siendo � una constante universal
relacionada con la densidad de masa �. Si conociéramos su valor, el poten-cial gravitatorio debería poderse calcular mediante la ecuación de Poissonr2U = 4�G�, siendo G la constante de gravitación universal. Todo pareceindicar que, si U está relacionado con T��, U ha de estar necesariamenterelacionado con el tensor métrico g��: En una ecuación general parece quedeberían aparecer las derivadas segundas de g�� que, además, han de tener su

16.5. ACELERACIÓNDEUNAPARTÍCULAENUNCAMPOGRAVITATORIODÉBIL.111
divergencia nula, por paralelismo con el potencial U . Casualmente, el campotensorial de Einstein tiene estas características, con lo que podemos escribir:
R�� �1
2g��R = ��T��; (16.6)
en el interior de una distribución de materia. Esta es la Ley de Einstein dela Gravitación. Puede reescribirse como
R�:� �1
2g�:�R = ��T�:�; (16.7)
que podemos contraer, obteniéndo R = �T , con T = T�:�. Luego, tambiénpodemos escribir:
R�� = �(1
2g��T � T��): (16.8)
Además, la divergencia de g�� es nula: g��;� = 0. Otra forma podría serR�� � 1
2g��R��g�� = ��T��; siendo � constante. Esta ecuación da buenos
resultados para observables en distancias galácticas. Como veremos, la con-stante �, relacionada con la constante cosmológica, sirvió inicialmente parasatisfacer los prejuicios de Einstein.
16.5. Aceleración de una partícula en un cam-po gravitatorio débil.
En campos gravitatorios como el terrestre, la geometría del espacio es noeuclídea y no existen sistemas inerciales, estrictamente hablando. Sin embar-go, y por propósitos prácticos, se usan incluso coordenadas cartesianas enla super�cie terrestre. Podemos hacer esta aproximación porque el campogravitatorio terrestre es muy débil, y no hay serios problemas entre puntospróximos, pudiéndose construir sistemas localmente inerciales..Supongamos que, en un punto cualquiera, el espacio es euclídeo (local-
mente euclídeo) y varía poco entre puntos próximos (casi cartesiano). En esecaso podemos considerar que la métrica también lo hace, y g�� = ���+h�� og�� = ��� + k��, correspondiendo ��� a los elementos de la matriz identidad(métrica euclídea de un universo plano) y k�� a un incremento in�nitesimal.Por otra parte sabemos que

112 CAPÍTULO 16. RELATIVIDAD GENERAL
���; =1
2
�@h �@y�
+@h� @y�
� @h��@y
�= � ����:
� (16.9)
en primera aproximación, y para h�� pequeños.Las ecuaciones del movimiento pueden obternerse a través de:
dy�
ds= dy�
dtdtds= (�i�; 1):Si la partícula está en reposo, dy�
ds= (0; 1) = (0; 1)
y las ecuaciones del movimiento se reducen a:
d2y�
ds2+ �44:
� = 0: (16.10)
Sustituyendo �44:�, obtenemos,d2y�
ds2= 1
2@h44@y�
� @h4�@y4. Como vemos, existe un
problema en la notación, que surge de utilizar los símbolos de Christo¤el desegunda especie. En realidad, el problema no es tal, ya que, para un espacioeuclídeo y en cartesianas g�� = ���, con lo que h�:� = h��; y ���:� =�� ���; ) �44:
� = �� �44; =
12�� �@h 4@y4
+ @h4 @y4
� @h44@y
�=
12
�@h�:4@y4
+ @h4:�
@y4� @h44
@y�
�)
d2y�
ds2= 1
2@h44@y�
� @h�:4@y4
:
Diferenciando dy�
ds, obtenemos:
d2y�
ds2= (v2 � c2)�1
�dvdt; 0�� v dv
dt(v2 � c2)�2(v; ic), que, para v = 0, d
2y�
ds2=
� 1c2
�dvdt; 0�. La componente de la aceleración puede ponerse como�c2
�12@h44@yi
+ ic@hi:4@t
�.
Si el campo no varía con el tiempo, la aceleración quedaría como�grad�12c2h44
�.
Si el potencial U es newtoniano, la fuerza es del tipo F = �gradU , luego laaceleración está ligada al gradiente del potencial. Es fácil identi�car que
U =1
2c2h44 ) g44 = 1 +
2U
c2; (16.11)
donde el 1 procede de �44. Hemos visto el procedimiento que se sigue para rela-cionar los potenciales gravitatorios con la métrica del espacio. Por supuesto,la forma general es harto más complicada y requiere la resolución de laecuación de Einstein.
16.6. LEY DE GRAVITACIÓN DE NEWTON. 113
16.6. Ley de gravitación de Newton.
Vamos a ver ahora que se pueden deducir las leyes de gavitación de New-ton a partir de la de Einstein, siempre y cuando los campos gravitatorios seandébiles. Para ello partimos del campo tensorial de Riemann-Christo¤el en unsistema de campo débil y para coordenadas curvilíneas y�. En primera aprox-imación, eliminando términos de orden superior, el campo tensorial R � Cpuede escribirse como:
R�:� � =@
@y ���:
� � @
@y��� :
�: (16.12)
Contrayendo el primer y cuarto índice, en esta notación, obtenemos el campotensorial de Ricci:
R� =@
@y ���:
� � @
@y��� :
�: (16.13)
Sustituyendo los símbolos de Christo¤el,
R� =1
2
@
@y
�@h��@y�
+@h��@y�
� @h��@y�
��
1
2
@
@y�
�@h��@y
+@h �@y�
� @h� @y�
�=
=1
2
�@2h��@y�@y
+@2h� @y�@y�
� @2h��@y�@y
� @2h �@y�@y�
�:(16.14)
Para �; = 4, sustituyendo, obtenemos:
R44 =1
2
�@2h��@y4@y4
+@2h44@y�@y�
� 2 @2h�4
@y�@y4
�: (16.15)
Si h�� es independiente del tiempo, caso de trabajar con una distribuciónde materia estática, como ocurre en la mecánica newtoniana, las derivadasparciales respecto a y4 son nulas, con lo que:
R44 =1
2
@2h44@y�@y�
=1
2r2h44: (16.16)
Como U = 12c2h44, tenemos que R44 = 1
c2r2U:
114 CAPÍTULO 16. RELATIVIDAD GENERAL
Ahora bien, recordemos que, si no hay tensiones internas en la distribuciónde materia, el campo tensorial T�� = �00V�V�, con �00 = (1��2)� = �
2, con
lo que, para Vi = 0) �00 = �. A su vez, T = Ti:i = Tii = T44 = �c2�00: En
dicho caso, y aproximadamente,
1
c2r2U =
1
2{c2�00; (16.17)
con lo que
r2U =1
2{c4�00; (16.18)
que es la ecuación clásica de Poisson si { = 8�Gc4:
16.7. Nube de polvo en caida libre.
Si tomamos una nube de partículas (distribución homogénea y uniformede masa) que cae libremente en el campo gravitatorio generado por la propianube, el problema se ciñe al cálculo del campo tensorial energía-impulso de lapropia nube contrayéndose. En un sistema curvilíneo arbitrario y� = y�(�),�jo en una de la partículas que mide el tiempo propio � , la cuadrivelocidadde la partícula será V � = dy�
d�= icdy
�
ds= icu�, puesto que, en el convenio que
estamos usando, dsd�= ic y dt
d�= . Así, para esta cuadrivelocidad obtenemos
queV 2 = V�V
� = g��V�V � = �c2g��u�u� = �c2: (16.19)
Como T�� = �00V�V �, la ecuación de Einstein se reduce a:�
�00V�V �
�; = (�00V
�) ; V� + �00V
�V �; : (�) (16.20)
Como V�V � = �c2, si diferenciamos obtenemos que V�;� V �+V�V�;� = 0)
V �;� V� = 0. Es decir, (�00V�) ; V
� = 0. Derivando en (�) obtenemos que:�@V �
@y�+ � �:
�V
�V � = 0)
(resultado de la aceleración que ya conocemos)
@V �
@y�dy�
d�+ � �:
�dy
d�
dy�
d�= 0)

16.8. MÉTRICAS CON SIMETRÍA ESFÉRICA. 115
d2y�
d� 2+ � �:
�dy
d�
dy�
d�= 0 =
d2y�
ds2+ � �:
�dy
ds
dy�
ds; (16.21)
que es la ecuación de una geodésica. Es decir, una partícula en una nubede ellas satisface la ley de Einstein que, a su vez, autoincluye las leyes delmovimiento.
16.8. Métricas con simetría esférica.
Cuando de realiza un cambio entre sistemas de referencia espacio-temporales,desde coordenadas y� a y0�, el tensor métrico ha de cambiar como un ten-sor totalmente covariante. Sin embargo, las expresiones analíticas de g��(y )son totalmente diferentes de la correspondientes a g0��(y
0 )�1� �:n
�, lo cual
no es paradójico, ya que el tensor métrico que tenemos no es un invariante.Sin embargo, en casos especiales, existe la posibilidad de que sí lo sea bajocualquier transformación. Vamos a estudiar estos casos.Dentro de un campo gravitatorio la geometría sólo puede ser casi euclídea,
por lo que no existen coordenadas rectangulares cartesianas. Sin embargo, noexisten di�cultades para, en la práctica, de�nir aproximadamente este tipode ejes y supondremos, por tanto, que las coordenadas de un suceso en uncampo gravitatorio casi pueden considerarse e interpretarse físicamente co-mo cartesianas "localmenterectangulares más el tiempo. Vamos a buscar unamétrica que, cuando se exprese en estas coordenadas, sea invariante respectoal grupo de transformaciones de coordenadas similar al de Lorentz, y queinterpretaremos físicamente como rotaciones del sistema fO; y�g, quedandot inalterada. Para ser más precisos, hay que suponer que las coordenadasespaciales (yi) pueden de�nirse de tal forma que la métrica g��(y�) sea in-variante bajo el grupo de transformaciones ortogonales fy0�g = A
y� , conAA| = I. Esta métrica recibe el nombre de esféricamente simétrica en tornoa O.Invariantes bajo este grupo de transformaciones, con grado inferior al
segundo en las diferenciales de las coordenadas, son
x2 + y2 + z2; xdx+ ydy + xdx; dx2 + dy2 + dz2; (16.22)
que, en coordenadas esféricas, estos invariantes serían
r2; rdr; dr2 + r2(d�2 sin2 �d�2); (16.23)
116 CAPÍTULO 16. RELATIVIDAD GENERAL
y también r; rdr; d�2 sin2 �d�2. La métrica más genérica con simetría esféricapuede construirse como:
ds2 = A(r; t)dr2+B(r; t)(d�2+sin2 �d�2)+C(r; t)drdt+D(r; t)dt2: (16.24)
Los coe�cientes dependen sólo de r; t por motivos de centralidad. Si se haceel cambio r02 = B(r; t), tenemos que
ds2 = E(r0; t)dr2 + r02(d�2 + sin2 �d�2) + F (r0; t)dr0dt+G(r0; t)dt2: (16.25)
Exactamente, para coordenadas esféricas puras en un sistema verdadera-mente inercial (sin distribuciones de masa y para campos estáticos), la métri-ca sería la conocida:
ds2 = dr2 + r2(d�2 + sin2 �d�2)� c2dt2: (16.26)
Quitando las primas por comodidad, para campos estáticos y para un sistemacasi-inercial, tendríamos E(r; t) = F (r; t) = 1; G(r; t) = �c2: En general, r0se comporta casi como r. Como ds2 no varia al cambiar t por �t (simetríatemporal), podemos escribir:
ds2 = a(r)dr2 + r2(d�2 + sin2 �d�2)� b(r)c2dt2: (16.27)
En un instante dado �jo t, la métrica del espacio en presencia de un campogravitatorio puede obtenerse haciendo dt = 0. La longitud de un arco elemen-tal de circunferencia de radio r0 entre (r0; �); (r0; � + d�) sería ds = r0d�,en el plano � = �=2. La longitud total de la circunferencia sería 2�r0: Sinembargo, r0 no es la longitud del radio para � = �0: Para un elemento dearco entre (r; �0); (r + dr; �0) tenemos que ds = a1=2dr. El radio total seríaZ r0
0
a1=2dr: (16.28)
Evidentemente, no sirven las expresiones euclídeas para las longitudes decircunferencias, ni para otras magnitudes.Si hacemos g11 = a; g22 = r2; g33 = r2 sin2 �; g44 = �bc2 ) g =
�abc2r4 sin2 � con a � b � 1. Tomando a(r) = e�; b(r) = e�, con � =�(r); � = �(r), los símbolos de Christo¤el serían:
16.9. LA SOLUCIÓN DE SCHWARZSCHILD. 117
���: =
0BBBBBBBBBBBBBBBBBBBBBBBBBB@
0BB@12�0 0 0 00 �re�� 0 00 0 �re�� sin2 � 00 0 0 1
2c2�0e���
1CCA0BB@0 1=r 0 01=r 0 0 00 0 � sin � cos � 00 0 0 0
1CCA0BB@0 0 1
2�0 0
0 0 cot � 012�0 cot � 0 00 0 0 0
1CCA0BB@0 0 0 00 0 0 00 0 0 00 0 0 0
1CCA
1CCCCCCCCCCCCCCCCCCCCCCCCCCA
:
donde las primas indican derivadas respecto a r.El campo tensorial de Ricci será:
RI =
0BBBBBBBB@
12�00 + 1
4�02�
14�0�0 � 1
r�0
0 0 0
0e��(1
2r�0�
12r�0 + 1)� 1 0 0
0 0 RI22 sin2 � 0
0 0 0�c2e���[RI11+
1r(�0 � �0)]
1CCCCCCCCA:
(16.29)
16.9. La solución de Schwarzschild.
La métrica estática tiene simetría esférica, como hemos visto, y determinael campo gravitatorio creado por una distribución de materia estática, tam-bién con simetría esférica, siempre que se satisfaga la ecuación de Einstein.Vamos a considerar el caso especí�co que se da cuando todo el espacio estávacio de materia excepto el cuerpo esférico, en cuyo centro está el origen y

118 CAPÍTULO 16. RELATIVIDAD GENERAL
centro de simetría O. En cualquier punto exterior al cuerpo, T�� = T = 0, yla ecuación de Einstein se reduce a R�� = 0. Es decir,
�00 +1
2�02 � 1
2�0�0 � 2
r�0 = 0;
1
2r�0 � 1
2r�0 + 1 = e�;
�00 +1
2�02 � 1
2�0�0 +
2
r�0 = 0: (16.30)
Restando la última y la primera de estas ecuaciones, � + � = cte. Como,cuando r ! 1, suponemos que la métrica se aproxima a la esférica pura,válida en ausencia de campos gravitatorios, en r !1; � = � = 0) �+� =0, con lo que podemos eliminar � en las anteriores ecuaciones, llegando a que
r�0 = 1� e�: (16.31)
La ecuación es de variables separables y admite por solución
a = e� = (1� 2m=r)�1; (16.32)
siendo m una constante de integración, con lo que
b = e� = 1� 2m=r; (16.33)
que han de satisfacer al conjunto de ecuaciones diferenciales anteriores. Porlo tanto, llegamos a la métrica
ds2 =dr2
1� 2m=r + r2(d�2 + sin2 �d�2)� c2(1� 2m=r)dt2; (16.34)
Esta ecuación fué obtenida por primera vez por Schwarzschild. Veremosque la constantem es proporcional a la masa del cuerpo que genera al campo.También puede comprobarse que, para el potencial U a distancia r de uncuerpo esférico de masa M;
U = �GMr
(16.35)
con lo que
g44 = 1�2GM
c2r: (16.36)
16.10. LAS ÓRBITAS PLANETARIAS. EL CASO DE MERCURIO. 119
y, por tanto,
b = 1� 2GMc2r
: (16.37)
Comparando con las anteriores ecuaciones obtenemos que
m =GM
c2: (16.38)
Esta métrica no es válida para r = 2m = 2GM=c2, conocida como radiode Schwarzschild, y que vale 9mm para la Tierra. Como la métrica sólo esválida fuera del cuerpo, esta cantidad no representa ningún problema. Sinembargo, sí puede ser problemática en cuerpos muy densos, en los que suvalor puede exceder al radio del cuerpo.
16.10. Las órbitas planetarias. El caso deMer-curio.
(Primera comprobación de la Relatividad General).La atracción que ejercen los planetas sobre el sol produce una minúscula
aceleración sobre este cuerpo, respecto a determinado inercial sin especi�car.Por lo tanto, si se construye un sistema de coordenadas que se mueva con elsol, existirá un campo gravitatorio, relativo a este sistema y corresponde ala aceleración mencionada, además de los campos del sol y los planetas. Sinembargo, para el análisis que vamos a realizar, todos estos campos puedendespreciarse. De este modo, y respecto a un sistema esférico polar con supolo en el centro del sol, el campo gravitatorio se supondrá determinado porla métrica de Schwarzschild. Los planetas serán tratados como partículas concampos gravitatorios despreciables, cuyas líneas del universo (trayectorias)son geodésicas. Vamos a calcular dichas geodésicas.Puesto que los intervalos entre puntos adyacentes de la línea del universo
de una partícula son necesariamente de tipo temporal, s será imaginaria puraa lo largo de dicha curva. Por lo tanto, en el cálculo de las geodésicas es másconveniente reemplazar s por � , trabajando con la métrica en función de d� 2.Es decir, la métrica de Schwarzschild quedaría como
d� 2 = � 1c2
�dr2
1� 2m=r + r2(d�2 + sin2 �d�2)
�+ (1� 2m=r)dt2 (16.39)

120 CAPÍTULO 16. RELATIVIDAD GENERAL
con lo que las geodésicas serían
d
d�
�r
1� 2m=rdr
d�
�+
m
(1� 2m=r)2
�dr
d�
�2�
r
�d�
d�
�2� r sin2 �
�d�
d�
�2+mc2
r2
�dt
d�
�2= 0;
d
d�
�r2d�
d�
�� r2 sin � cos �
�d�
d�
�2= 0;
d
d�
�r2 sin2 �
d�
d�
�= 0;
d
d�
�r � 2m
r
dt
d�
�= 0: (16.40)
La primera de las ecuaciones puede reemplazarse por
r
r � 2m
�dr
d�
�2+ r2
(�d�
d�
�2+ sin2 �
�d�
d�
�2)�
c2
r(r � 2m)
�dt
d�
�2= �c2: (16.41)
Vamos a elegir un sistema de coordenadas en el que un planeta estémoviéndose inicialmente en el plano � = �
2. Inicialmente, por tanto, d�
d�= 0
y la segunda geodésica se reduce a d2�d�2
= 0 en ese instante. Volviendo adiferenciar esta ecuación y sustituyendo los valores iniciales encontramos quetodas las derivadas de � son nulas en el instante inicial. Aplicando el teoremade Maclaurin, � = �
2para cualquier valor de � , demostrando que el planeta
se mueve siempre en dicho plano (eclíptica).Integrando las ecuaciones tercera y cuarta, con � = �
2,
d�
d�=
h
r2;
dt
d�=
kr
r � 2m; (16.42)

16.10. LAS ÓRBITAS PLANETARIAS. EL CASO DE MERCURIO. 121
siendo h; k constantes de integración. Sustituyendo estos valores, con � = �2,
en la dos últimas ecuaciones obtenemos�dr
d�
�2+h2
r3(r � 2m) = c2(k2 � 1) + 2mc
2
r:
Eliminando d� = r2
hd�, se llega a la ecuación de la órbita planetaria:�
h
r2dr
d�
�2+h2
r2= c2(k2 � 1) + 2mc
2
r+2mh2
r3: (16.43)
Tomando u = 1=r, la ecuación se reduce a�du
d�
�2+ u2 =
c2
h2(k2 � 1) + 2mc
2
h2u+ 2mu3: (16.44)
Diferenciando respecto a �, la ecuación toma una forma más familiar en lateoría de órbitas:
d2u
d�2+ u =
mc2
h2+ 3mu2: (16.45)
Esta ecuación es la análoga de la mecánica clásica
d2u
d�2+ u =
GM
h2;
dondeM es la masa del cuerpo atractor y h es momento constante del planetarespecto al centro de atracción, es decir,
r2d�
dt= h:
Si identi�camos la variable temporal t de la teoría clásica con el tiempopropio � de la relatividad, esta ecuación y d�
d�= h
r2son idénticas, con lo que
se justi�ca la elección de la constante de integración. demás, si tomamosm = GM
c2, la única diferencia entre la ecuación clásica y la relativista es el
término 3mu2. La razón entre este término y la ley del cuadrado inverso mc2
h2
es
3h2u2
c2=3
c2r2�2:

122 CAPÍTULO 16. RELATIVIDAD GENERAL
r� es la componente transversal de la velocidad del planeta y, para los plan-etas del sistema solar, toma su valor más grande en el caso de Mercurio, con4;8� 104 m=s. Dado que c = 3� 108 m=s, la razón entre los términos antescitados, 3
c2r2�2 = 7;7� 10�8, que es despreciable. Sin embargo, el efecto del
término adicional ha demostrado ser acumulativo, como vamos a estudiar,razón por la que es conveniente una comprobación experimental.La solución de la ecuación clásica conduce a
u =�
h2f1 + e cos(�� e!)g ; (16.46)
donde � = GM = mc2; e es la excentricidad de la órbita y e! es la longituddel perihelio; la cantidad � es una solución aproximada, aunque bastanteexacta de la ecuación relativista. El error obtenido al tomar
3mu2 =3m�2
h4f1 + e cos(�� e!)g2 (16.47)
es totalmente despreciable, por ser este término despreciable bajo cualquiercircunstancia. La ecuación relativista puede reemplazarse por
d2u
d�2+ u =
�
h2+3m�2
h4f1 + e cos(�� e!)g2 : (16.48)
Esta ecuación tiene una solución análoga a la clásica con términos adi-cionales correspondientes a una solución particular relativa a la forma rela-tivista, y que tiene el siguiente aspecto:
3m�2
h4
�1 +
1
2e2 � 1
6e2 cos 2(�� e!) + e� sin(�� e!)� : (16.49)
El término constante no puede aislarse en las observacione experimentales.El término cos 2(� � e!) tiene una amplitud demasiado pequeña para poderdetectarse. Sin embargo, el término restante tiene una amplitud que aumentacon � y, en consecuencia, su efecto es acumulativo. La solución general es
u =�
h2
�1 + e cos(�� e!) + 3m�e
h2� sin(�� e!)�
' �
h2f1 + e cos(�� e! � �e!)g ; (16.50)
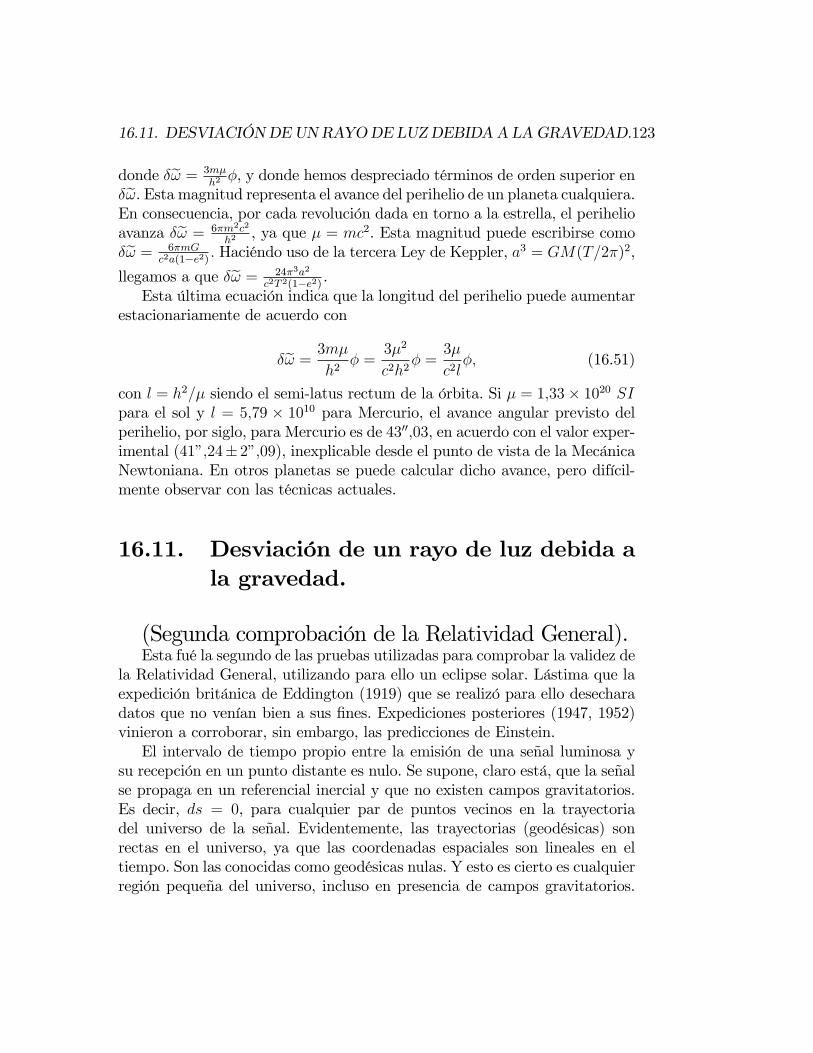
16.11. DESVIACIÓNDEUNRAYODE LUZDEBIDAALAGRAVEDAD.123
donde �e! = 3m�h2�, y donde hemos despreciado términos de orden superior en
�e!. Esta magnitud representa el avance del perihelio de un planeta cualquiera.En consecuencia, por cada revolución dada en torno a la estrella, el perihelioavanza �e! = 6�m2c2
h2, ya que � = mc2. Esta magnitud puede escribirse como
�e! = 6�mGc2a(1�e2) : Haciéndo uso de la tercera Ley de Keppler, a
3 = GM(T=2�)2,
llegamos a que �e! = 24�3a2
c2T 2(1�e2) .Esta última ecuación indica que la longitud del perihelio puede aumentar
estacionariamente de acuerdo con
�e! = 3m�
h2� =
3�2
c2h2� =
3�
c2l�; (16.51)
con l = h2=� siendo el semi-latus rectum de la órbita. Si � = 1;33� 1020 SIpara el sol y l = 5;79 � 1010 para Mercurio, el avance angular previsto delperihelio, por siglo, para Mercurio es de 4300;03, en acuerdo con el valor exper-imental (41";24� 2";09), inexplicable desde el punto de vista de la MecánicaNewtoniana. En otros planetas se puede calcular dicho avance, pero difícil-mente observar con las técnicas actuales.
16.11. Desviación de un rayo de luz debida ala gravedad.
(Segunda comprobación de la Relatividad General).Esta fué la segundo de las pruebas utilizadas para comprobar la validez de
la Relatividad General, utilizando para ello un eclipse solar. Lástima que laexpedición británica de Eddington (1919) que se realizó para ello desecharadatos que no venían bien a sus �nes. Expediciones posteriores (1947, 1952)vinieron a corroborar, sin embargo, las predicciones de Einstein.El intervalo de tiempo propio entre la emisión de una señal luminosa y
su recepción en un punto distante es nulo. Se supone, claro está, que la señalse propaga en un referencial inercial y que no existen campos gravitatorios.Es decir, ds = 0, para cualquier par de puntos vecinos en la trayectoriadel universo de la señal. Evidentemente, las trayectorias (geodésicas) sonrectas en el universo, ya que las coordenadas espaciales son lineales en eltiempo. Son las conocidas como geodésicas nulas. Y esto es cierto es cualquierregión pequeña del universo, incluso en presencia de campos gravitatorios.

124 CAPÍTULO 16. RELATIVIDAD GENERAL
Se puede generalizar diciendo que las líneas del universo de un rayo de luzson geodésicas nulas en regiones ilimitadas del espacio.Vamos, a continuación a proceder a calcular el camino de un rayo de
luz sometido al campo gravitatorio de un cuerpo esférico, partiendo de laanterior idea. Usaremos la métrica de Schwarzschild, pero reemplazando �por el parámetro �, para calcular las geodésicas. La forma g��
dy�
d�dy�
d�= 0 se
convierte en
r
r � 2m
�dr
d�
�2+ r2
(�d�
d�
�2+ sin2 �
�d�
d�
�2)�
c2
r(r � 2m)
�dt
d�
�2= 0: (16.52)
Si, una vez más, tomamos � = �2, sin perder la generalidad, el rayo de luz
en el plano ecuatorial sigue la trayectoria
d2u
d�2+ u = 3mu2;
con u = 1=r. Esta es una familia de de rayos de luz en el plano ecuatorial. Enprimera aproximación y despreciando el término de la derecha, la solución es
u =1
Rcos(�+ �);
siendo �; R constantes de integración. Esta es la ecuación de una linea rectacuya distancia desde el centro de atracción es R. Es decir, para camposgravitatorios débiles, las trayectorias de los rayos de luz siguen siendo rectas,como también con�rman los experimentos con la luna.Si hacemos � = 0, también sin pérdida de generalidad, con el rayo paralelo
al eje Y , (� = ��=2), haciendo el cambio u = cos�=R, obtenemos
d2u
d�2+ u =
3m
R2cos2 �:
El término correspondiente a la solución particular adicional es
m
R2(2� cos2 �)
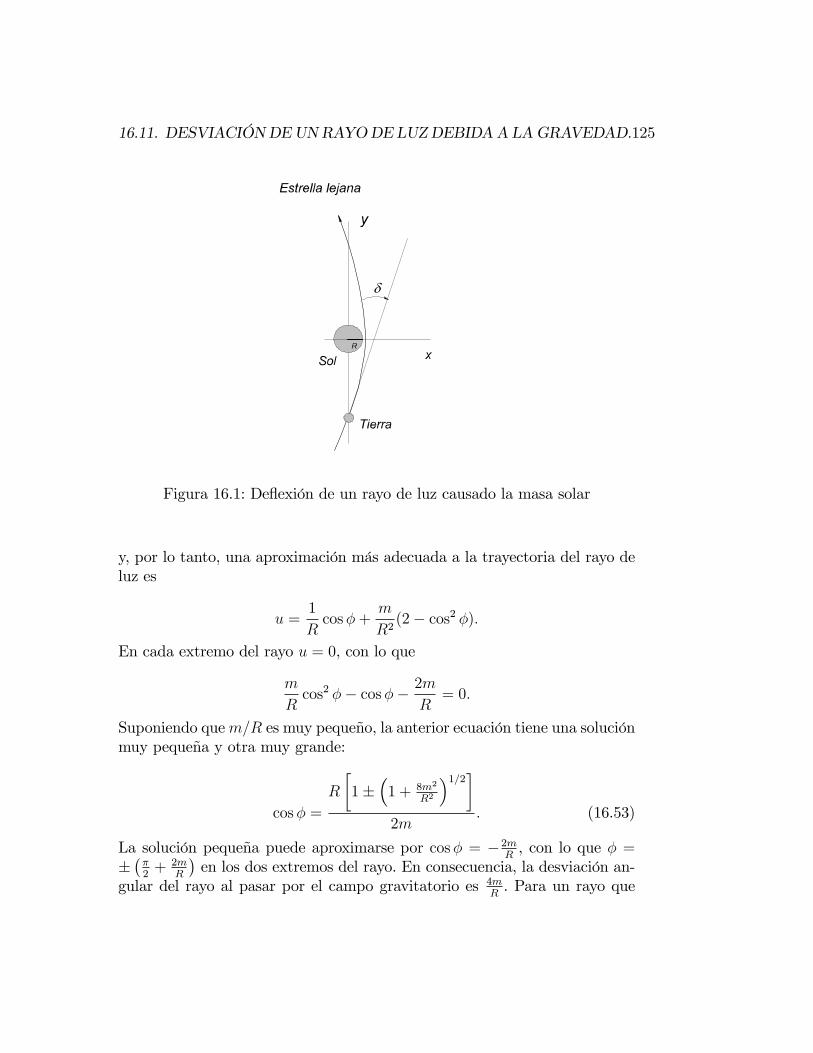
16.11. DESVIACIÓNDEUNRAYODE LUZDEBIDAALAGRAVEDAD.125
Figura 16.1: De�exión de un rayo de luz causado la masa solar
y, por lo tanto, una aproximación más adecuada a la trayectoria del rayo deluz es
u =1
Rcos�+
m
R2(2� cos2 �):
En cada extremo del rayo u = 0, con lo que
m
Rcos2 �� cos�� 2m
R= 0:
Suponiendo quem=R es muy pequeño, la anterior ecuación tiene una soluciónmuy pequeña y otra muy grande:
cos� =
R
�1�
�1 + 8m2
R2
�1=2�2m
: (16.53)
La solución pequeña puede aproximarse por cos� = �2mR, con lo que � =
���2+ 2m
R
�en los dos extremos del rayo. En consecuencia, la desviación an-
gular del rayo al pasar por el campo gravitatorio es 4mR. Para un rayo que

126 CAPÍTULO 16. RELATIVIDAD GENERAL
pase cerca del la corona solar, con R = 6;95 � 108m y m = 1;5 � 1010m,� � 8;62 � 10�6rad � 1;7700. Esta cantidad se ha comprobado experimen-talmente haciendo uso de una estrella próxima al disco solar, durante uneclipses totales.
16.12. Agujeros negros. Ondas gravitatorias.
La métrica de Schwarzchild sólo es válida en regiones externas a un cuerpoesférico que haga las veces de atractor. Así, si el radio de este cuerpo esmayor que 2m, el hecho de que la componente g11 ! 1 si r = 2m no creaninguna di�cultad. Sin embargo, si el radio del cuerpo es menor que 2m, laesfera r = 2m queda en el espacio vacio, y el campo en su vecindad ha deestudiarse con mucho cuidado.A pesar de que la métrica no es válida en la esfera r = 2m, tiene una
solución aceptable de la ecuación de Einstein en la región 0 < r < 2m.Consideremos un móvil desplazándose radialmente en esta zona. No tienepor qué ser en caida libre. Si tomamos � y � constantes, la métrica puedereducirse a
c2d� 2 = ��1(dr2 � c2�2dt2)
donde � = 2m=r�1 > 0, a lo largo de la línea de universo del cuerpo. Dada laecuación del movimiento r = r(t), esta ecuación determina el tiempo propio� marcado por un reloj anclado en el cuerpo. Como d� debe ser real, sededuce que dr=dt > c� o que dr=dt < �c�. Estas desigualdades prueban quees imposible que el cuerpo sea estacionario en nuestro sistema de coordenadaspara la región que analizamos. Esto implica que nuestra representación delsistema de referencia como un conjunto de relojes midiendo t y que, a suvez, es estacionario para el espacio (r; �; �) ya no es válido. Es decir, lascondiciones estáticas en los alrededores de una masa atractiva no existen enesta región.Vamos a considerar un cuerpo en caída libre a lo largo del radio y hacia
el centro de atracción en la región r < 2m. Si las condiciones iniciales son(t = 0; r = R; dr=dt = 0), de las ecuaciones de las órbitas planetarias obten-emos que la ecuación del movimiento del cuerpo viene determinada por�
dr
dt
�2= 2mc2
�1� 2m
R
��1�1� 2m
r
�2�1
r� 1
R
�

16.12. AGUJEROS NEGROS. ONDAS GRAVITATORIAS. 127
con lo que
ct =
�R
2m� 1�1=2 Z R
r
r3=2dr
(r � 2m) (R� r)1=2
y la integral diverge a 1 cuando r �! 2m. Esto signi�ca que, en el for-malismo de Schwarzschild, el cuerpo requerirá de una coordenada temporalin�nita para alcanzar la esfera de radio r = 2m. Si un observador �jo a unaconsiderable distancia del centro de atracción observara al cuerpo por pro-cedimientos ópticos, tendría que esperar a que los fotones que emergen delcuerpo lo alcanzaran. A través de estos fotones el tiempo aparente para lacaída del cuerpo hasta el radio de Schwarzschild para un observador externosería in�nito.Si, en vez de eliminar el tiempo propio � de las ecuaciones de la trayectoria
eliminamos la coordenada t, se obtiene que�dr
d�
�2= 2mc2
�1
r� 1
R
�:
Si integramos con � = 0 y r = R, se obtiene que
c� =p(R3=2m)
"rr
R�� rR
�2+1
2cos�1
�2r
R� 1�#
:
� es el tiempo registrado por un reloj que se mueve junto al cuerpo, y que es�nito para cualquier valor de r desde 2m hasta 0.Es evidente que que el sistema de referencia que hemos usado no es válido
si se ha de estudiar el movimiento a través de la esfera de Schwarzschild yaque t se hace in�nito para r = 2m para sucesos que pueden ser detectadosexperimentalmente por determinados observadores. En principio parece unfallo del sistema de referencia, dado que g es �nito para r = 2m, y no haysingularidades espacio-temporales en la región en estudio.Una posibilidad es la de sustituir el tiempo por u = t + f(r), con f(r)
tal que se haga in�nitamente negativa en r = 2m, de forma que cancele elin�nito que hemos señalado. Esto es lo que se conoce como renormalización.Así, dt = du� f 0(r)dr, con lo que la métrica de Schwarzschild se transformaen
ds2 = Fdr2 + r2�d�2 + sin2 �d�2
�+ c2 (1� 2m=r) (2f 0drdu� du2);

128 CAPÍTULO 16. RELATIVIDAD GENERAL
con
F =r
r � 2m � c2
r(r � 2m) f�2:
Si tomamos cf 0 = r=(r � 2m) eliminamos la singularidad. Por tanto,
cf(r) = r + 2m log(r � 2m);
quedando la métrica como
ds2 = r2�d�2 + sin2 �d�2
�+ 2cdrdu� c2(1� 2m=r)du2:
que satisface las ecuaciones de Einstein en el vacio. Pero el campo en estamétrica ya no es estático. El término que encierra a la primera potencia de duhace que el campo no sea simétrico con respecto al pasado y futuro. En otraspalabras, la trayectoria de una partícula en caída libre no admite inversióntemporal.Si retomamos al cuerpo cayendo radialmente (d� = d� = 0), aunque no
sea en caída libre, tenemos que, a lo largo de una línea del universo,
ds2 = 2cdrdu� c2(1� 2m=r)du2:
Como ds ha de ser negativa para cualquier movimiento posible,
dr
du<1
2c (1� 2m=r) :
Si r < 2m, drdues negativo y el cuerpo necesariamente caerá hacia el ori-
gen. Por tanto, en esta región, cualquier cuerpo caerá irremisiblemente ha-cia el centro de atracción, colapsando. Esta métrica evita la posibilidad demovimientos radiales de escape, cosa que si permitía la de Schwarzschild,pero podemos recuperar esa posibilidad cambiando el signo de u.Para un cuerpo cayendo radialmente en caída libre desde un estado inicial
de reposo dr=du = 0 en r = R > 2m, tendremos que g41 = c; g44 = �c2(1�2m=r) y la ecuaciones del movimiento se trasforman en
d
d�
�dr
d�� c (1� 2m=r) du
d�
�= 0;
que, junto a la primera integral
2cdr
d�
du
d�� c2 (1� 2m=r)
�du
d�
�2= �c2;

16.12. AGUJEROS NEGROS. ONDAS GRAVITATORIAS. 129
nos llevan a que�dr
du
�2+ 4mc
�1
r� 1
R
�dr
du+ 2mc2 (1� 2m=r)
�1
r� 1
R
�= 0;
cuyas raíces son
dr
du= 2mc
�1
r� 1
R
��
s�2m
�1
r� 1
R
�(1� 2m=R)
�:
Cuando r > 2m tenemos una raiz positiva y otra negativa, reales. Pero r hade decrecer inicialmente (para que la raiz anterior no sea imaginaria) por loque sólo es válida la raiz negativa. r disminuye uniformemente hasta r = 0 sinniguna peculiriadad. Las líneas del universo para los fotones que se muevanradialmente son las geodésicas nulas
2cdrdu� c2 (1� 2m=r) du2 = 0:
Existen dos familias de geodésicasde este tipo. Estas son
du
dr= 0, y c
du
dr=
2r
r � 2m:
Deshaciéndo los cambios de variables, la primera de las familias se traduceen que
cdt
dr= � r
r � 2msi r > 2m. Esta solución corresponde a un fotón que se mueve hacia el centrode atracción. Para la segunda familia, la solución es
cdt
dr=
r
r � 2m
en la misma región, correspondiendo a un fotón que se aleja del centro atrac-tor. En el primer caso el fotón cruza la esfera de Schwarzchild y luego cae alorigen. Dentro de la esfera los fotones pueden dividirse en dos clases: aquellospara los que u es constante a lo largo de una línea del universo y que puedentener su fuente fuera de la esfera. Y aquellos que cumplen con la segundaecuación cuya solución es
cu = 2r + 4m log(2m� r) + cte:

130 CAPÍTULO 16. RELATIVIDAD GENERAL
Aquí, cuando r �! 2m; u �! �1, por lo que los fotones no pueden procederde una fuente externa. Como du=dr < 0, estos fotones también caen hacia elorigen.Por lo tanto nos encontramos conque, en el campo descrito por la última
métrica, ninguna partícula (incluyendo los fotones) puede cruzar la esfera deSchwarzschild en el sentido de r creciente. Por otra parte, las partículas yfotones que crucen dicha esfera en dirección al origen serán atrapados por él,no pudiendo regresar al mundo exterior. Las anteriores condiciones adjudi-cadas a la esfera de Schwarzschild la convierten en un agujero negro. Algunasestrellas con su�ciente masa pueden colapsar bajo su propio campo gravita-torio hasta alcanzar un radio menor que el de Schwarzschild. En ese casouna contracción mayor haría que la estrella colapsara a un punto singularde densidad in�nita creándose un sumidero de materia y luz. Puede darseel caso de que dicho colapso requiera un tiempo in�nito en relojes sitos ennuestro sistema referencia terrestre, por lo que se puede argumentar que talesagujeros negros aún no han sido creados. Sin embargo, en un universo dondelos sucesos ocurran simultáneamente respecto a cierto tiempo universal, elanterior argumento no tiene sentido. Una nave cayendo hacia uno de estosagujeros, en la que el tiempo que midan sus relojes es �nito, es posible. Dehecho se han detectado objetos en las primeras fases de colapso.Curiosamente, cambiando el signo de u en el cambio de variables, ob-
tendríamos otra métrica que satisface las ecuaciones de Einstein y que daríalugar a un agujero blanco. En este, la materia y los fotones sólo pueden cruzarla esfera se Schwarzschild hacia fuera, convirtiéndose en una fuente de mate-ria o luz. Dado que la métrica de Schwarzschild es invariante ante inversionestemporales, existe la posibilidad de que agujeros negros y blancos coexistan.Otra situación interesante se produce cuando el tensor de Ricci toma, en
primera aproximación, la forma
Rjk =1
2hjk;ii =) R =
1
2hjj;ii;
con lo que la ecuación de Einstein toma la forma
Rjk �1
2gjkR =
1
2hjk;ii �
1
4�jkhrr;ii =
1
2h0jk;ii;
conh0jk = hjk;ii = �2�Tjk;

16.13. PRINCIPIO COSMOLÓGICO. TIEMPO COSMOLÓGICO. 131
por lo que podemos escribir la ecuación de Einstein como
�2h0jk = h0jk;ii = �2�Tjk:
Como la condición de armonicidad (D�Alambertiana nula) es h0ik;i = 0, laecuación de Einstein en el espacio vacio sería
�2h0jk =�@2
@x2+
@2
@y2+
@2
@z2� @2
c2@t2
�h0jk = 0;
ecuación de ondas correspondiente a las ondas gravitacionales propagándoseen el vacio a la velocidad de la luz.
16.13. Principio cosmológico. Tiempo cosmológi-co.
La cosmología es el estudio de los fenómenos a gran escala que se producenen el Universo, como son la distribución y movimiento de las galaxias, ladensidad de radiación y polvo en el espacio intergaláctico, etc. También estárelacionada con los tiempos en los que se producen variaciones apreciablesen la evolución del cosmos, que es del orden de 109 años. Fundamentalmentese interesa por el principio y �n del universo, caso de tenerlos como parecesugerir la evidencia experimental. Realmente, el origen del universo se estudiaen las distintas cosmogonías, particularmente en el Génesis, y en algunasmodernas especulaciones. Los agnósticos y no creyentes en general tienen elinconveniente de verse obligados a estudiar situaciones físicas más complejas.Dado que la galaxias son eléctricamente neutras, la única fuerza que afec-
ta su movimiento es la gravedad, razón por lo que la cosmología se basa enla teoría de la gravitación. Hay que señalar que la mecánica newtoniana esbastante capaz de generar modelos cosmológicos que explican la mayoría delos sucesos observados. Sin embargo, estos modelos suponen necesariamenteque el espacio es euclídeo, mientras que la teoría de Einstein indica que, enpresencia de campos gravitatorios, el espacio pasa a ser curvo y su geometríaes Riemanniana. Esta curvatura es inapreciable si la crea el campo gravitato-rio de una sola galaxia, por lo que puede obviarse en universos locales. Perosus efectos tienen consecuencias mayores cuando la extensión espacial abarcatodo el cosmos. Como veremos, una de las consecuencias es que el volumentotal del espacio es �nito y, por tanto, contradice la teoría newtoniana.
132 CAPÍTULO 16. RELATIVIDAD GENERAL
16.14. Espacios de curvatura constante.
En una época determinada, el estado de nuestro modelo cosmológico debeser homogéneo e isótropo. Por lo menos, el espacio tridimensional debe teneresas propiedades. La super�cie de una esfera es una espacio bidimensionalde este tipo, inmersa en un E3. Es obvio que una hiperesfera tridimensionalinmersa en un E4 ha de tener características similares. De la misma formaque una esfera ordinaria incluye al plano E2 como un caso especial cuandoel radio es in�nito, una hiperesfera de radio in�nito es una caso sencillo deespacio homogéneo e isótropo. Existe una tercera clase de estos espacios elcual, siendo análogo al E3, se diferencia de la hiperesfera por tener volumenin�nito. Todos ellos tienen curvatura escalar constante R. Sus métricas estánde�nidas positivas y su geometría es euclídea es regiones pequeñas. Con estetipo de métricas no existen otros espacios de Riemann que sean homogéneose isótropos.Tomemos unas coordenadas cartesianas rectangulares (x; y; z; u) en E4.
Una hiperesfera de radio S será
x2 + y2 + z2 + u2 = S2:
Dado que u puede determinarse por x; y; z mediante la ecuación anterior,puede construirse un sistema coordenado por los puntos de la hiperesfera unavez que se hayan localizado las x; y; z del punto de coordenadas (x; y; z; u).Siempre que x; y; z sean pequeñas en comparación con S, se comportaránaproximadamente como un sistema cartesiano rectangular de E3 y podremosde�nir un sistema cuasi esférico polar (r; �; �), con lo que u2 = S2 � r2.Diferenciando, obtenemos
du2 =r2
u2dr2 =
r2
S2 � r2dr2:
La distancia entre dos puntos in�nitamente próximos sobre la hiperesfera(x; y; z; u) y (x+ dx; y + dy; z + dz; u+ du) viene dada por
ds2 = dx2 + dy2 + dz2 + du2 =
= dr2 + r2(d�2 + sin2 �d�2) +r2
S2 � r2dr2 =

16.14. ESPACIOS DE CURVATURA CONSTANTE. 133
=S2
S2 � r2dr2 + r2(d�2 + sin2 �d�2); (16.54)
que es la métrica de un R4 hiperesférico. Si 1=S2 = 0 recobramos a E3 encoordenadas esféricas. Si calcularamos la curvatura escalar con esta métricaencontraríamos que es �6=S2, constante. Si sustituimos S2 por �S2, la cur-vatura sigue siendo constante y el espacio homogéneo e isótropo. este es eltercer tipo de espacio que antes habíamos mencionado.Por ser los espacios homogéneos e isótropos podemos tomar el polo r = 0
donde mejor nos convenga, y medir los ángulos en cualquier par de direccionesperpendiculares a partir de donde nos parezca más pertinente.Cuando r � S,las métricas anteriores se aproximan a la esférica ordinaria, demostrando queel espacio es euclídeo en regiones pequeñas.Consideremos un círculo de radio constante, en el plano � = �
2, en el
espacio de�nido por la primera de las métricas. La distancia entre puntosvecinos � y � + d� en el círculo viene dada por ds = rd�; siendo 2�r lalongitud de la circunferencia que bordea al círculo. A lo largo de un radio deeste círculo d� = d� = 0, y la distancia entre puntos próximos r y dr estarádada por
ds =SdrpS2 � r2
: (16.55)
Integrando desde 0 a r la longitud del radio será
� = S arcsin(�
S): (16.56)
Por lo tanto, r = S sin��S
�, y la longitud de la circunferencia, en términos
de �, es c = 2�S sin��S
�. Como sin
��S
�<��S
�, c < 2��, que es el resultado
euclídeo.El resultado se puede interpretar fácilmente en el caso familiar de R2,
super�cie de una esfera vulgar y corriente de radio S. Las cantidades S; r; �están representadas en la �gura. Al aumentar �, r primero aumenta hastaalcanzar su valor máximo S, disminuyendo después hasta � = �S, cuandor = 0: Nuestro sistema aparenta ser ambíguo, dado que dos puntos diferentespueden tener las mismas coordenadas. Este inconveniente puede soslayarsesustituyendo r por �, con lo que la métrica sería
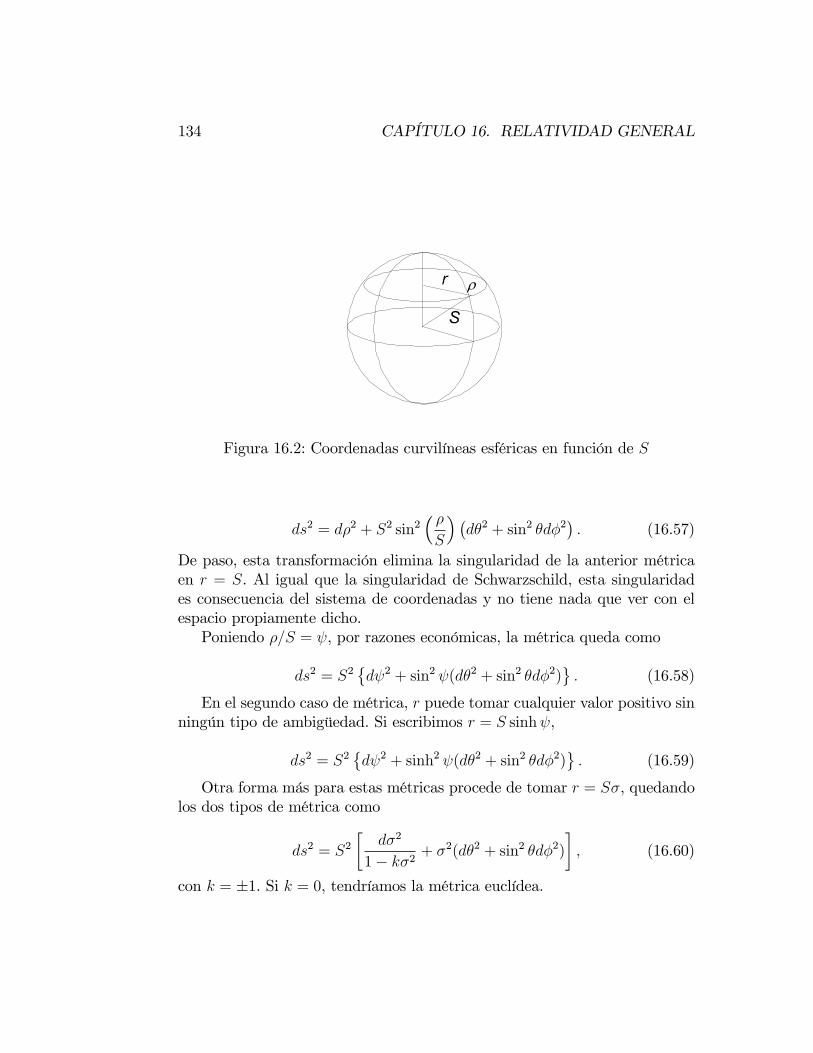
134 CAPÍTULO 16. RELATIVIDAD GENERAL
Figura 16.2: Coordenadas curvilíneas esféricas en función de S
ds2 = d�2 + S2 sin2� �S
� �d�2 + sin2 �d�2
�: (16.57)
De paso, esta transformación elimina la singularidad de la anterior métricaen r = S. Al igual que la singularidad de Schwarzschild, esta singularidades consecuencia del sistema de coordenadas y no tiene nada que ver con elespacio propiamente dicho.Poniendo �=S = , por razones económicas, la métrica queda como
ds2 = S2�d 2 + sin2 (d�2 + sin2 �d�2)
: (16.58)
En el segundo caso de métrica, r puede tomar cualquier valor positivo sinningún tipo de ambigüedad. Si escribimos r = S sinh ,
ds2 = S2�d 2 + sinh2 (d�2 + sin2 �d�2)
: (16.59)
Otra forma más para estas métricas procede de tomar r = S�, quedandolos dos tipos de métrica como
ds2 = S2�
d�2
1� k�2+ �2(d�2 + sin2 �d�2)
�; (16.60)
con k = �1. Si k = 0, tendríamos la métrica euclídea.
16.14. ESPACIOS DE CURVATURA CONSTANTE. 135
Pero no hemos incluído la variable temporal. La métrica de Robertson-Walker se obtiene de la anterior mediante
ds2 = gijdyidyj + g44(dy
4)2:
Como la distancia elemental temporal es, en el tiempo propio, �c2d� 2 =g44dy
4dy4, donde g44 sólo pude depender del tiempo para observadores galác-ticos, el nuevo tiempo cósmico es ct =
R p�g44dy4, y la métrica se reducea
ds2 = gijdyidyj � c2dt2:
La métrica de Robertson-Walker, en tiempos cósmicos, es
ds2 = S2�
d�2
1� k�2+ �2(d�2 + sin2 �d�2)
�� c2dt2: (16.61)
S es una constante a un tiempo dado, pero puede variar con t. Se le conocecomo factor de escala cósmica.

136 CAPÍTULO 16. RELATIVIDAD GENERAL
Parte III
Bibliografía
137


139
Anderson, James L., Principles of Relativity Physics, Academic Press(N.Y. 1967)González de Posadas, Francisco, Problemas de Análisis Tensorial, Copi-
graf, S.L:, (Madrid,1972)Lawden, D.F., An Introduction to Tensor Calculus, Relativity and Cos-
mology, John Wiley and Sons (N.Y., 1986)Lichnerowicz, A., Elementos de Cálculo Tensorial, Aguilar (Madrid, 1972)Wrede, Robert C., Introduction to Vector and Tensor Analysis, Dover
(N.Y., 1972)