Modeling and Input Optimization Under Uncertainty for a Collection of RF MEMS Devices
16
Modeling and Input Modeling and Input Optimization Under Optimization Under Uncertainty for a Uncertainty for a Collection of RF MEMS Collection of RF MEMS Devices Devices Matt Allen 1 , Rich Field 2 & Jordan Massad 2 1 University of Wisconsin-Madison Madison, WI 2 Sandia National Laboratories* Albuquerque, NM 2006 ASME International Mechanical Engineering Congress and Exposition Chicago, IL November 2006 Sandia is a multi-program laboratory operated by Sandia Corporation, a Lockheed Martin Company, for the United States Department of Energy’s National
description
Modeling and Input Optimization Under Uncertainty for a Collection of RF MEMS Devices. Matt Allen 1 , Rich Field 2 & Jordan Massad 2 1 University of Wisconsin-Madison Madison, WI 2 Sandia National Laboratories* Albuquerque, NM - PowerPoint PPT Presentation
Transcript of Modeling and Input Optimization Under Uncertainty for a Collection of RF MEMS Devices

Modeling and Input Optimization Modeling and Input Optimization Under Uncertainty for a Under Uncertainty for a
Collection of RF MEMS DevicesCollection of RF MEMS Devices
Matt Allen1, Rich Field2 & Jordan Massad2
1University of Wisconsin-MadisonMadison, WI
2Sandia National Laboratories*Albuquerque, NM
2006 ASME International Mechanical Engineering Congress and ExpositionChicago, IL
November 2006
Sandia is a multi-program laboratory operated by Sandia Corporation, aLockheed Martin Company, for the United States Department of Energy’s National
Nuclear Security Administration under Contract DE-AC04-94AL85000.

2
IntroductionIntroduction
There has been significant interest in RF MEMS switches because they can potentially provide:
very low power consumption high isolation excellent linearity contained in a compact package
One significant challenge is obtaining the high reliability required.
Previous studies at Sandia have observed orders of magnitude increase in life when the impact velocity of the switches is reduced.
This is difficult because the electro-static closing force is highly nonlinear.
SpringsRaised post
”NE”tab
100 m
Fixed to substrate
Transmis-sion line
Actuation pad
SpringsRaised post
”NE”tab
100 m
Fixed to substrate
Transmis-sion line
Actuation pad

3
OutlineOutline
Switch design and uncertainty model Response of ensemble of switches to:
Unshaped waveform Deterministically designed waveform Optimization Under Uncertainty (OUU)
Improving performance: Effect of a design change and OUU Effect of process improvement and OUU
Conclusions Wild cheering and applause

4
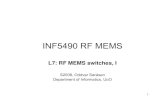
Switch DesignSwitch Design
RF Switch consists of a stiff plate suspended by four folded leaf springs.
A voltage is applied to a pad under the plate resulting in an electrostatic force that closes the switch.
The switch is well approximated by a single-degree of freedom model. The input is shaped to limit
excitation to higher modes to assure that this assumption is valid.
SpringsRaised post
”NE”tab
100 m
Fixed to substrate
Transmis-sion line
Actuation pad
SpringsRaised post
”NE”tab
100 m
Fixed to substrate
Transmis-sion line
Actuation pad
meff
keff
Felectrostatic
SDOF Model

5
OUU ApproachOUU Approach Random variation in switch
parameters described by probability density functions (PDFs).
Waveform optimized numerically to minimize impact velocity over the ensemble of switches.
Deterministic ApproachDeterministic Approach Variation in switch parameters is
ignored. Waveform designed semi-
analytically to satisfy the switch with average parameters.
Succeeds only if the optimum is insensitive to variation in switch parameters.
??
?? ????

6
80 85 90 95 100 1050
0.05
PD
F
Modulus
GPa
80 85 90 95 100 1050
1
2
3
Cou
nt
3.4 3.6 3.8 4 4.20
2
4x 10
6
PD
F
Electrostatic gap
G (m)
3.4 3.6 3.8 4 4.20
1
2
Cou
nt
6 6.5 7 7.5 8
PD
F
Plate thickness
T (m)
6 6.5 7 7.5 80
1
2
Cou
nt
2 2.5 30
5
10x 10
6
PD
F
Travel distance
D (m)
0
1
2
Cou
nt
Model
DataModel
Data
Model
Data
Model
Data
Uncertainty ModelUncertainty Model
Plate thickness, electrostatic gap, travel distance and elastic modulus were measured and fit to uniform and Beta Probability Density Functions (PDFs).
Expert opinion was used to augment the data since few samples were available. Modulus and Thickness were used to deduce effective mass and stiffness.
3 3.5 4
x 10-9
0
1
2
3
4
x 109
Meff (kg)
Model for effective mass
20 40 60 80 1000
0.02
0.04
0.06
Keff (N/m)
Model for effective stiffness
PDF estimate
Histogram
PDF estimate
Histogram
3 3.5 4
x 10-9
0
1
2
3
4
x 109
Meff (kg)
Model for effective mass
20 40 60 80 1000
0.02
0.04
0.06
Keff (N/m)
Model for effective stiffness
PDF estimate
Histogram
PDF estimate
Histogram
80 85 90 95 100 1050
0.05
PD
F
Modulus
GPa
80 85 90 95 100 1050
1
2
3
Cou
nt
3.4 3.6 3.8 4 4.20
2
4x 10
6
PD
F
Electrostatic gap
G (m)
3.4 3.6 3.8 4 4.20
1
2
Cou
nt
6 6.5 7 7.5 8
PD
F
Plate thickness
T (m)
6 6.5 7 7.5 80
1
2
Cou
nt
2 2.5 30
5
10x 10
6
PD
F
Travel distance
D (m)
0
1
2
Cou
nt
Model
DataModel
Data
Model
Data
Model
Data
PD
F
PD
F

7
15 20 25 30 35 40 45 500
2
4
6
8
10
12
14
16
18
Maximum Contact Velocity (cm/s)
Co
un
t
Histogram of Maximum Contact Velocity for Ensemble
Response without Input ShapingResponse without Input Shaping
90% of the switches experience maximum contact velocities below 40.3 cm/s
90 % Upper Quantile

8
Deterministic Waveform DesignDeterministic Waveform Design
A waveform that is optimum in a deterministic sense gives higher contact velocities than an unshaped waveform when applied to the ensemble of switches.
0 10 20 30 40 50 600
5
10
15
20
Maximum Contact Velocity (cm/s)
Co
un
t
Histogram of Maximum Contact Velocity for Ensemble
Vu = 43 cm/s

9
0 5 10 15 20 25 30 35 400
50
100
150
200
time (s)
Vo
ltag
e (V
olt
s)
ts(1)
tr(1)
tp(1)
u1
ts(2)
u2
tr(2)
Optimization Objective & StrategyOptimization Objective & Strategy
Optimization Objective: g(ts
1,…) = vu+ cnc*pnc of the switches
experience contact velocities lower than vu
(i.e. P(Vmax > vu) = 0.10) pnc is the probability that a
switch doesn’t close in 250 s
cnc is a constant to weight the relative importance of the two Optimization Strategy:
Set u2 = 0 and adjust tp(1) (duration of first pulse) until the maximum contact velocity for the
ensemble of 200 switches is ~10cm/s. Use exhaustive search to find starting values for ts
(2) (start time of second pulse), tr(2) (rise
time of second pulse) and u2 (maximum voltage of second pulse). Refine using Nelder-Mead Simplex algorithm.

10
OUU Waveform DesignOUU Waveform Design
Results: 90% have maximum contact velocities
below 20 cm/s The mean maximum contact velocity
is 15.3 cm/s These represent improvements of more
than 50% compared to the unshaped waveform or the deterministically designed waveform.
None of the switches have a contact velocity near zero.
10 15 20 250
5
10
15
20
25
Maximum Contact Velocity (cm/s)
Co
un
t
Histogram of Maximum Contact Velocityfor Ensemble, = 15.2653
Vu = 20 cm/s

11
Design ChangeDesign Change
Electrostatic force varies with the inverse square of the electrostatic gap (G) minus the switch displacement (X).
The displacement (X) is less than the travel distance (D).
The system is unstable for: X > G/3 => D/G > 1/3
Currently: 0.59 · D/G · 0.75
The design was modified to reduce this ratio resulting in
0.41 · D/G · 0.52. This design does not venture as
far into the unstable region as the previous did.

12
Design Change and OUUDesign Change and OUU
35 % reduction in upper and mean contact velocities.
Upper reduced from 19.7 to 12.5 cm/s
Mean reduced from 15.3 to 9.8 cm/s
Contact velocity is 70% less than unshaped waveform or deterministically designed waveform.
0 5 10 15 20 250
5
10
15
20
25
30
35
Maximum Contact Velocity (cm/s)
Co
un
t
Histogram of Maximum Contact Velocityfor Ensemble, = 9.7822
Vu = 13 cm/s

13
Process ImprovementProcess Improvement
How much would the performance improve if the process repeatability were improved by 50%?
Coefficient of Variation of the following were decreased by 50%. (COV = standard deviation / mean).
Gap Distance Travel Distance Thickness
Optimization procedure was repeated with this modified uncertainty model for the switch.
This level of improvement may not be feasible, but this type of analysis can provide motivation for allocating resources to process improvement.

14
Process Improvement and OUUProcess Improvement and OUU
Simulated the effect of process improvement:
Reduced the COV of gap, travel and thickness by 50%
>35% reduction in upper and mean contact velocities
Upper 12.8 cm/s vs 19.7 cm/s Mean 9.6 cm/s vs. 15.3 cm/s
5 10 15 200
5
10
15
20
25
Maximum Contact Velocity (cm/s)
Co
un
t
Histogram of Maximum Contact Velocityfor Ensemble, = 9.6232
Vu = 13 cm/s

15
SummarySummary

16
ConclusionsConclusions
Shaped waveforms can reduce the impact velocity that an ensemble of switches experiences.
The contact velocity was reduced by 50% using the waveform that was optimized under uncertainty.
Further reductions of 35% were demonstrated after modifying the switch design or reducing process variability. (Net reduction of 70%)
Uncertainty must be accounted for when designing shaped waveforms.
A waveform that was optimum for the average switch actually increased the impact velocity when applied to the ensemble of switches.