LINGUISTICA GENERALE E COMPUTAZIONALE CONOSCENZA LESSICALE: IL LESSICO GENERATIVO.

Elementi di Meccanica ComputazionaleCorso di Laurea in Ingegneria Civile
Pavia, 2014
Linear beams: direct approach and finite element
formulation
Ferdinando Auricchio 1 2
1DICAR – Dipartimento di Ingegneria Civile e Architettura, Universita di Pavia, Italy2IMATI – Istituto di Matematica Applicata e Tecnologie Informatiche, CNR, Italy
March 13, 2014
F.Auricchio (UNIPV) Linear beam March 13, 2014 1 / 80

Beam theory: geometry I
Beam geometric definition:
◦ 3D body with two dimensions negligeble wrt the third one (1D problem)◦ Distinguish between beam axis (x-axis) and beam cross-section (yz-plane)◦ Consider only planar beam problems
– assume symmetry wrt xy-plane (load and cross section)– y-z are principal axes of inertia– develop all the problem only considering x-y axes
F.Auricchio (UNIPV) Linear beam March 13, 2014 2 / 80

Beam theory: local vs global I
Axes x − y are local beam axes, i.e. relative to a specific beam under investigation
Local beam axes x − y distinguished from global axes X − Y
Global axes are relative to the whole problem and not to a specific beam
◦ Developments relative to beam model are done initially wrt local beam axes, later onconverted to global axes
F.Auricchio (UNIPV) Linear beam March 13, 2014 3 / 80

Change of coordinates I
Given two bases {e1, e2} and {E1,E2}, a vector f can be expressed equivalently inany of the two bases as
f = FbEb = faea
◦ Adopt Einstein summation convention, i.e. repeated index in a multiplicative termimplies summation over valid index range
Possible to derive a relationship between the two set of components, by taking dotproduct with one of the base vectors
(FbEb) · Ei = (faea) · Ei
resulting in
Fi = fa(ea · Ei )
or
Fi = Riafa with Ria = Ei · ea (1)
F.Auricchio (UNIPV) Linear beam March 13, 2014 4 / 80

Change of coordinates II
Introducing engineering (vector) notation, f is expressed in the two bases as two setsof numbers, i.e. {f} and {F} with
{f}|i= fi , {F}|
i= Fi
Possible to convert components also through the following matrix operation
{F} = [R] {f} (2)
where
[R] =
E1 · e1 E1 · e2 E1 · e3E2 · e1 E2 · e2 E2 · e3E3 · e1 E3 · e2 E3 · e3
� Exercise. Comment on the differences between the quantities f, {f} and {F}.
� Exercise. Show that in the case of rotation around the third axis, [R] can also be rappresented as follows:
[R] =
cos φ − sinφ 0sinφ cos φ 0
0 0 1
with φ the angle between E1 and e1.
� Exercise. Prove that R is an orthogonal matrix, i.e. [R]T [R] = [R] [R]T = [I]
F.Auricchio (UNIPV) Linear beam March 13, 2014 5 / 80

Beam theory: kinematics I
Kinematic assumptions: [ Euler-Bernoulli beam ]
Plane sections normal to beam axis remain plane andnormal to axis during change of configuration
◦ Continuum displacement field: (seen as a 2D continuum problem)
s = s(x , y) with s =
{sx(x , y)sy (x , y)
}
◦ Beam “axis” displacements: (seen as a 1D beam problem)
u = u(x) , v = v(x) , θ = θ(x)
F.Auricchio (UNIPV) Linear beam March 13, 2014 6 / 80

Beam theory: kinematics I
Express continuum field s = {sx , sy}T in terms of beam axis displacements u, v , θ
{sx(x , y) = u(x)− yθ(x)sy (x , y) = v(x)
(3)
with◦ displacement positive if directed as coordinate axes◦ rotation positive if counterclockwise
Unknown fields:u = u(x) , v = v(x) , θ = θ(x)
⋆ s = s(x , y) in term of u = u(x), v = v(x), θ = θ(x) has a linear dependence on y
◦ So far, we are requiring that plane sections remain plane but we are not requiringthat sections remain orthogonal to beam axis
◦ For notational simplicity apices indicate derivation wrt independent variable, i.e.
u′ =
du
dx
F.Auricchio (UNIPV) Linear beam March 13, 2014 7 / 80

Beam: kinematics I
Strain:
◦ Non trivial strain components: εxx & εyx
εxx =dsx
dx= u′ − yθ′
εyx =1
2
(
dsy
dx+
dsx
dy
)
=1
2
(
v ′ − θ)
◦ Introduce beam strain-like quantities:
ε = u′ axial strain
χ = θ′ curvature
γ = v ′ − θ shear strain
εxx = ε− yχ
εyx =1
2γ
� Exercise. Verify that other strain components besides εxx and εyx are effectively zero
F.Auricchio (UNIPV) Linear beam March 13, 2014 8 / 80

Beam: static relations I
Stress:◮ Assume only two non-trivial stress components
σxx 6= 0 , τyx 6= 0
◮ As a consequence, only three non-trivial “internal forces” or “characteristics”(force-like quantities):
N =
∫
A
[σxx ] dA axial force
M = −
∫
A
[yσxx ] dA bending moment
S =
∫
A
[τyx ] dA shear force
F.Auricchio (UNIPV) Linear beam March 13, 2014 9 / 80

Beam: equilibrium I
Note: we are assuming as positive beam characteristics the standard ones !!
Equilibrium equations:
N′ + p = 0
M′ − S = 0
S′ − q = 0
(4)
with p and q axial and transverse distributed loads (positive if along axis directions)
� Exercise. Recall definition of stress tensor components in a general framework
� Exercise. Recall definition of (internal forces) characteristic components in a general framework
� Exercise. Verify equations 4 imposing directly equilibrium of an infinitesimal beam element
� Exercise. Verify equations 4 starting from a three-dimensional version of principle of virtual work usingassumed expression for displacement fields and integrating by parts. Observe that not only it is possibleto verify equilibrium equations but this approach leads naturally to a definition of internal characteristicforces “conjugate” to assumed displacements
F.Auricchio (UNIPV) Linear beam March 13, 2014 10 / 80

Beam: constitutive relation I
Pointwise 3D constitutive stress-strain relations:{
σxx = Eεxx = E (ε− yχ)
σyx = 2Gεyx = Gγ(5)
◦ Using beam characteristic definition, obtain local beam constitutive relations:
N =
∫
A
[σxx ] dA ⇒ N = EAε
M = −
∫
A
[yσxx ] dA ⇒ M = EIχ
S =
∫
A
[σyx ] dA 6⇒ S = κGAγ
with
I =
∫
A
y2dA moment of inertia
κ shear correction factor
◮ Note: shear correction factor κ introduced to correct inconsistency associated toequation 5 (for rectangular cross sections κ = 5/6)
F.Auricchio (UNIPV) Linear beam March 13, 2014 11 / 80

Beam: basic equations I
Kinematics:
{sx = u(x)− yθ(x)sy = v(x)
ε = u′
χ = θ′
γ = v′ − θ
Constitutive:
N = EAε
M = EIχ
S = κGAγ
Equilibrium:
N′ + p = 0
M′ − S = 0
S′ − q = 0
� Exercise. Review 3D Saint Venant model. Compare developed model with 3D Saint Venant model.
F.Auricchio (UNIPV) Linear beam March 13, 2014 12 / 80

Beam: differential eqns I
Bernoulli beam: beam with no shear deformation
Plane sections normal to beam axis remain plane andnormal to axis during the deformation
γ = 0 ⇒ θ = v′
Differential eqns ( Elastica ):
M′′ − q = 0
M = EIv′′
}⇒ EIv
IV − q = 0
� Exercise. Using the elastica compute rotations at the extremes of a simply supported beam loaded with aunit moment on one support
� Exercise. Using the elastica compute the maximum deflection of a simply supported beam loaded in themiddle span with a unit concentrated force.
F.Auricchio (UNIPV) Linear beam March 13, 2014 13 / 80

Beam: direct stiffness formulation I
Using elastica equation, we can investigate the stiffness of a given beam element(displacement based approach)
Stiffness: (set of) force(s) required to obtain a unitary displacement
◦ Indicating with pedix 1 quantities relative to left node (node 1) and with pedix 2quantities relative to right node (node 2), we can start to solve problems such as:
v1 = 1 , θ1 = v2 = θ2 = 0
◦ Using the elastica, compute beam characteristic forces T1,M1,T2,M2
T1 = 12EI
l3M1 = −6
EI
l2
T2 = 12EI
l3M2 = 6
EI
l2
(6)
F.Auricchio (UNIPV) Linear beam March 13, 2014 14 / 80

Beam: direct stiffness formulation I
� Exercise. Verify positions 6 using Matlab.
%
% Computation of stiffness coeff. for a doubly-clamped beam% subjected to a vertical unit displ. on the left extreme
%
clear
syms x % indipendent variable
syms EI % cross-section stiffness constantsyms c0 c1 c2 c3 % integration constants
syms l % beam lengthsyms v1 theta1 v2 theta2 % nodal dofs
v = c0 + c1*x + c2*x^2 + c3*x^3
rot = diff(v ,x) % rotationchi = diff(rot,x) % curvaturemom = EI*chi % bending moment
shear= diff(mom,x) % shear
% impose boundary conditions
eq1=subs(v ,x,0)-v1eq2=subs(rot,x,0)-theta1eq3=subs(v ,x,l)-v2
eq4=subs(rot,x,l)-theta2
F.Auricchio (UNIPV) Linear beam March 13, 2014 15 / 80

Beam: direct stiffness formulation II
[c0,c1,c2,c3] = solve(eq1,eq2,eq3,eq4,c0,c1,c2,c3)
v = c0 + c1*x + c2*x^2 + c3*x^3
v = subs(v,{v1,theta1,v2,theta2},[1,0,0,0])
rot = diff(v ,x) % rotationchi = diff(rot,x) % curvature
mom = EI*chi % bending momentshear= diff(mom,x) % shear
subs(mom ,x,0)subs(shear,x,0)
subs(mom ,x,l)subs(shear,x,l)
F.Auricchio (UNIPV) Linear beam March 13, 2014 16 / 80

Beam: direct stiffness formulation III� Exercise. Verify positions 6 using Sage.
EU beam stiffness
# # Computation of stiffness coeff. for a doubly-clamped beam# subjected to a vertical unit displ. on the left extreme#
var('x') # indipendent variablevar('EI') # cross-section stiffness constantcc=var('c1 c2 c3 c4') # integration constantsvar('l') # beam lengthv(x,cc)=c1*x^3+c2*x^2+c3*x+c4
rot = diff(v,x) # rotationchi = diff(rot,x) # curvaturemom = EI*chi # bending momentshear= diff(mom,x) # shear
v;rot;mom;shear
(x, cc) |--> c1*x^3 + c2*x^2 + c3*x + c4(x, cc) |--> 3*c1*x^2 + 2*c2*x + c3(x, cc) |--> 2*(3*c1*x + c2)*EI(x, cc) |--> 6*EI*c1
eq1 = v(0)==1eq2 = rot(0) == 0eq3 = v(l)== 0eq4 = rot(l) ==0
solution=solve([eq1,eq2,eq3,eq4],c1,c2,c3,c4,solution_dict = False)
solution[0]
[c1 == 2/l^3, c2 == -3/l^2, c3 == 0, c4 == 1]
type(solution)
<class 'sage.structure.sequence.Sequence'>
solution[0][0]; solution[0][0].rhs()
c1 == 2/l^32/l^3
c1 = solution[0][0].rhs()c2 = solution[0][1].rhs()c3 = solution[0][2].rhs()c4 = solution[0][3].rhs()
v1 = function('v1',x)rot1 = function('rot1',x)mom1 = function('mom1',x)shear1 = function('shear1',x)
v1(x)=c1*x^3+c2*x^2+c3*x+c4
rot1 = diff(v1,x) # rotationchi1 = diff(rot1,x) # curvaturemom1 = EI*chi1 # bending momentshear1= diff(mom1,x) # shear
v1
x |--> -3*x^2/l^2 + 2*x^3/l^3 + 1
shear1(0);mom1(0);shear1(l);mom1(l)
12*EI/l^3-6*EI/l^212*EI/l^36*EI/l^2
F.Auricchio (UNIPV) Linear beam March 13, 2014 17 / 80

Beam: direct stiffness formulation IV
� Exercise. Study the following three cases:
v2 = 1 , θ1 = v1 = θ2 = 0θ1 = 1 , v1 = v2 = θ2 = 0θ2 = 1 , v1 = v2 = θ1 = 0
� Exercise. Using a displacement based approach solve the following structure and in particular computethe vertical displacement and the rotation of cross section D.
� Exercise. Comment on the possible relation between the method adopted to solve the previous exerciseand the calculation of the reaction forces for imposed displacement such as v1 = 1 , θ1 = v2 = θ2 = 0
F.Auricchio (UNIPV) Linear beam March 13, 2014 18 / 80

Beam: direct stiffness formulation I
Using elastica equation, we can compute the complete (!) beam element stiffness
Indicating general “positive” set of beam nodal degrees of freedom as
v ={v1, θ1, v2, θ2
}T
and corresponding nodal reactions as
F = {F1,M1,F2,M2}T
we can try to construct relation between v and F
F.Auricchio (UNIPV) Linear beam March 13, 2014 19 / 80

Beam: direct stiffness formulation I
Relation between v and F is clearly linear:
F = Kev
with Ke indicating the beam stiffness matrix
◦ Note: we are now considering positive reaction forces wrt local coordinate system
◦ Note: difference between positive reaction forces and positive beam characteristics
◦ Accordingly, from equation 6 we can compute the first line of the beam stiffnessmatrix Ke :
Ke =
12EI
l36EI
l2−12
EI
l36EI
l2x x x x
x x x x
x x x x
F.Auricchio (UNIPV) Linear beam March 13, 2014 20 / 80

Beam: direct stiffness formulation I
� Exercise. Studying the following three cases:
v2 = 1 and θ1 = v1 = θ2 = 0θ1 = 1 and v1 = v2 = θ2 = 0θ2 = 1 and v1 = v2 = θ1 = 0
verify that the beam stiffness matrix Ke has the following form:
Ke=
12EI
l36EI
l2−12
EI
l36EI
l2
6EI
l24EI
l−6
EI
l22EI
l
−12EI
l3−6
EI
l212
EI
l3−6
EI
l2
6EI
l22EI
l−6
EI
l24EI
l
(7)
◦ Note: Ke is a 4×4 matrix, which can be sub-partitioned in four 2×2 nodal matrices
Ke =
x x x xx x x x
x x x xx x x x
=
[Ke
ii Keij
Keji Ke
jj
]
F.Auricchio (UNIPV) Linear beam March 13, 2014 21 / 80

Beam: direct stiffness formulation I
� Exercise. Compute the 6 × 6 stiffness matrix associated to the following set of nodal dofs
� Exercise. Investigate on the change of coordinate system for the the 6 × 6 matrix just computed.Hint. Limiting discussion to a single element (as in figure) assume that we computed the relation:
Ku = F
meant as a local relation, i.e.:K
lul = F
l (8)
where the local vector of dofs ul is given as:
ul =
{
ul1ul2
}
with ul1 =
ul1
v l1
θl1
and ul2 =
ul2
v l2
θl2
Now we can construct the rotation matrix which transform the ui vectors from a local to a globalcoordinate system, i.e.
ug
i = Ruli
F.Auricchio (UNIPV) Linear beam March 13, 2014 22 / 80

Beam: direct stiffness formulation II
with R−1 = RT . Accordingly,
ug = Tu
l =
[
R 0
0 R
]
ul
with T−1 = TT . Now, pre-multiplying relation 8 by T we obtain
TKlul = TF
l
which can be rewritten as:TK
lT
TTu
l = TFl
i.e as:(
TKlT
T)(
Tul)
= TFl
as well as:(
TKlT
T)
ug = F
g
where we can identify:
Kg = TK
lT
T
� Exercise. Solve exercise on page 18 using the 6 × 6 matrix just computed. [Hint: consider structurewithout constraint. Construct global stiffness matrix starting from element stiffness matrices. Computenodal forces. Impose external constraints eliminating specific rows and columns from the system.]
F.Auricchio (UNIPV) Linear beam March 13, 2014 23 / 80

Beam: toward a FEM formulation I
GOAL: compute the same beam stiffness matrix as before, how-ever using a more formal but general line of thinking
1 Weak formulation of the problem
Differential form → Integral form
2 Introduction of approximation fields
Integral form → Algebraic form
3 Solution of algebraic problem
⋆ Strong form ↔ differential form
⋆ Weak form ↔ integral form
◦ Differential form is natural format for BVP
◦ Weak form often associated to variational principles (necessary to have a functionaland to require stationarity)
◦ Approximation fields imply problem discretization
◦ Algebraic problem (linear or non-linear) easy to solve ⇒ matrix inversion
F.Auricchio (UNIPV) Linear beam March 13, 2014 24 / 80

Beam: strong vs weak form I
Strong form
EIvIV − q = 0
Weak form
◦ Multiply differential form by any function w and integrate over domain [a,b]
∫ b
a
[
w(
EIv IV − q)]
dx = 0
where w is named weight function◦ Integrate twice by parts
∫ b
a
[
w ′′EIv ′′]
dx =
∫ b
a
[wq] dx − Sw |ba + Mw ′∣
∣
b
a(9)
F.Auricchio (UNIPV) Linear beam March 13, 2014 25 / 80

Beam: strong vs weak form II
⋆ Note that◮ equation 9 can be rewritten as
a(w , v) = (w , q) − Sw |ba + Mw ′∣
∣
b
a
where
a(w , v) =
∫ b
a
[
w ′′EIv ′′]
dx , (w , q) =
∫ b
a
[wq] dx
◮ equation 9 can be rewritten as
Lint = Lext (10)
where
Lint =
∫ b
a
[
w ′′EIv ′′]
dx
Lext =
∫ b
a
[wq] dx − Sw |ba + Mw ′∣
∣
b
a
⋆ Since w is an arbitrary function, Equation 10 is the standard well-know principle ofvirtual work, i.e. an integral (weak) form expressing beam equilibrium
In the following neglect boundary terms for notational simplicity
F.Auricchio (UNIPV) Linear beam March 13, 2014 26 / 80

Beam: approximation I
Introduce an approximation
v(x) ≈n∑
j=1
Nj (x) vj
w(x) ≈n∑
i=1
Ni (x) wi
where:
◦ vj unknown parameters with j = 1..n
◦ wi arbitrary parameters with i = 1..n
◦ Ni (x) known functions with i = 1..n( the so-called shape functions )
Note: Ni = Ni (x) such that
∂v
∂x≈
∂
∂x
n∑
j=1
vjNj =n∑
j=1
vj∂Nj
∂x
∂w
∂x≈
∂
∂x
n∑
i=1
wiNi =
n∑
i=1
wi∂Ni
∂x
F.Auricchio (UNIPV) Linear beam March 13, 2014 27 / 80

Beam: approximation I
In a matrix format
v ≈n∑
j=1
Nj vj = Nv
w ≈n∑
i=1
Ni wi = Nw
v′′ ≈
n∑
j=1
N′′
j vj = Bv
w′′ ≈
n∑
i=1
N′′
i wi = Bw
with
v = [v1, v2, . . . , vn]T
w = [w1, w2, . . . , wn]T
N = [N1,N2, . . . ,Nn]
B =[N
′′
1 ,N′′
2 , . . . ,N′′
n
]
F.Auricchio (UNIPV) Linear beam March 13, 2014 28 / 80

Beam: linear system I
Weak formulation can be rewritten as:∫ b
a
[BwEIBv] dx =
∫ b
a
[Nwq] dx
wT
{∫ b
a
[B
TEIBv
]dx −
∫ b
a
[N
Tq]dx
}= 0
Arbitrariness of w implies
∫ b
a
[B
TEIBv
]dx =
∫ b
a
[N
Tq]dx
Algebraic system
Kv = f
with
K =
∫ b
a
[B
TEIB
]dx
f =
∫ b
a
[N
Tq]dx
F.Auricchio (UNIPV) Linear beam March 13, 2014 29 / 80

Beam: element point of view I
Take advantage of additive property of integrals and split integrals over the wholestructure as the sum of integrals on the single beams, i.e.
K =
∫ b
a
[B
TEIB
]dx =
nel∑
e=1
∫
le
[B
TEIB
]dx =
nel∑
e=1
Ke
f =
∫ b
a
[N
Tq]dx =
nel∑
e=1
∫
le
[N
Tq]dx =
nel∑
e=1
fe
where we set:
Ke =
∫
le
[B
TEIB
]dx
fe =
∫
le
[N
Tq]dx
F.Auricchio (UNIPV) Linear beam March 13, 2014 30 / 80

Beam: element point of view I
In general stiffness matrix constructed looking at the single element
Global view-point versus Local view-point
◦ Global node numbering vs local node numbering◦ Global dof numbering vs local dof numbering◦ etc. etc.
Local view-point is quite natural for Euler-Bernoulli beam element
◦ 2 nodes◦ 3 dofs per node◦ 6 dofs per element◦ Ke [6× 6]◦ Ke [6× 6] can be sub-partitioned in four 3× 3 nodal matrices
Ke =
x x x x x xx x x x x xx x x x x x
x x x x x xx x x x x xx x x x x x
=
[
Keii Ke
ij
Keji
Kejj
]
F.Auricchio (UNIPV) Linear beam March 13, 2014 31 / 80

Beam: standard element I
Global view-point
◦ 5 nodes
◦ 3 dofs per node
◦ 15 dofs per complete structure
◦ K[15× 15]
F.Auricchio (UNIPV) Linear beam March 13, 2014 32 / 80

Beam: standard element II
Different dimensions between K and Ke
K[15× 15] , Ke [6× 6]
To manage the different matrix dimensions, convert summation process into theso-called assembly process
K =Anel
e=1Ke
◦ Assembly process
K =
Ke=111 . . . . . . Ke=1
14 . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
Ke=141 . . . . . . Ke=1
44 . . .
. . . . . . . . . . . . . . .
+
Ke=211 Ke=2
12 . . . . . . . . .
Ke=221 Ke=2
22 . . . . . . . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . .
+ . . .
=
Ke=111 + Ke=2
11 Ke=212 . . . Ke=1
14 . . .
Ke=221 Ke=2
22 . . . . . . . . .
. . . . . . . . . . . . . . .
Ke=141 . . . . . . Ke=1
44 . . .
. . . . . . . . . . . . . . .
+ . . .
F.Auricchio (UNIPV) Linear beam March 13, 2014 33 / 80

Beam: standard element I
Key point: construction of elementary stiffness and load matrices
Ke =
∫
le
[B
TEIB
]dx
fe =
∫
le
[N
Tq]dx
Start focusing only on the transverse displacement-bending displacement fields
To do so, we need to define appropriate approximation functions:
{v = Nv
w = Nws.t.
{v′′ = Bv
w′′ = Bw
Question: how to construct N ???
F.Auricchio (UNIPV) Linear beam March 13, 2014 34 / 80

Beam: standard element I
Standard expression for the deflection:
v = a0 + a1x + a2x2 + a3x
3
or in matrix form:v = Ma
with
M =[1 x x
2x3]
a = [a0 a1 a2 a3]T
How to compute a in terms of “nodal” parameters v??
⋆ Need to riparametrize a in terms of the nodal dof for the beam element v, i.e.
v ={v1 θ1 v2 θ2
}T
⋆ Impose some specific conditions on the deflection expression v , i.e.{
v(0) = v1
v′(0) = θ1
,
{v(l) = v2
v′(l) = θ2
F.Auricchio (UNIPV) Linear beam March 13, 2014 35 / 80

Beam: standard element I
We need to express a in terms of v:
v(0) = a0 = v1
v′(0) = a1 = θ1
v(l) = a0 + a1l + a2l2 + a3l
3 = v2
v′(l) = a1 + 2a2l + 3a3l
2 = θ2
In matrix form:
Ca = v with C =
1 0 0 00 1 0 01 l l2 l3
0 1 2l 3l2
Inverting the above relation :
C−1 =
1 0 0 00 1 0 0
−3
l2−2
l
3
l2−1
l2
l31
l2−
2
l31
l2
F.Auricchio (UNIPV) Linear beam March 13, 2014 36 / 80

Beam: standard element I
Concluding:v = Ma = MC
−1v
i.e.v = Nv
withN = MC
−1 = [N1 N2 N3 N4]
or in a more explicit format:
N1 = 1− 3x2
l2+ 2
x3
l3
N2 = x − 2x2
l+
x3
l2
,
N3 = 3x2
l2− 2
x3
l3
N4 =x3
l2−
x2
l
(11)
� Exercise. Verify correctness of matrices C and C−1.
� Exercise. Verify correctness of shape functions Ni using expression 11.
� Exercise. Verify correctness of shape functions Ni solving the corresponding beam boundary valueproblems.
� Exercise. Given shape functions Ni , compute element stiffness matrix and compare it with matrix 7.
F.Auricchio (UNIPV) Linear beam March 13, 2014 37 / 80

Beam: a matlab code to compute standard element stiffness I
% Compute stiffness matrix associated to Euler-Bernoulli beam theory
clear all
syms xsyms a0 a1 a2 a3 % coefficients of polynomial cubic
syms v1 theta1 v2 theta2 % nodal dofssyms l % beam length
syms KK % stiffness matrix
% Elastica expression in terms of cubic constants
v = a0 + a1*x + a2*x^2 + a3*x^3 % elastica transv.displ.
theta = diff(v,x) % elastica rotation
% Convert elastica cubic constants in terms of nodal dofs
eq1=subs(v,x,0)-v1
eq2=subs(theta,x,0)-theta1eq3=subs(v,x,l)-v2
eq4=subs(theta,x,l)-theta2
[a0,a1,a2,a3] = solve(eq1,eq2,eq3,eq4,a0,a1,a2,a3)
% Elastica expression in terms of nodal dofs
v = a0 + a1*x + a2*x^2 + a3*x^3 % elastica expression
F.Auricchio (UNIPV) Linear beam March 13, 2014 38 / 80

Beam: a matlab code to compute standard element stiffness II
% Compute shape functions
N1=subs(v,{v1,theta1,v2,theta2},[1,0,0,0]) % shape function for v1-dofN2=subs(v,{v1,theta1,v2,theta2},[0,1,0,0]) % shape function for theta1-dof
N3=subs(v,{v1,theta1,v2,theta2},[0,0,1,0]) % shape function for theta1-dofN4=subs(v,{v1,theta1,v2,theta2},[0,0,0,1]) % shape function for theta1-dof
% Compute stiffness matrix terms
N1_d2 = simplify(diff(N1,x,2)) % take 2nd derivative of N1N2_d2 = simplify(diff(N2,x,2)) % take 2nd derivative of N2
N3_d2 = simplify(diff(N3,x,2)) % take 2nd derivative of N3N4_d2 = simplify(diff(N4,x,2)) % take 2nd derivative of N4
KK(1,1) = int(N1_d2*N1_d2,x,0,l); % compute v1-v1 stiffnessKK(1,2) = int(N1_d2*N2_d2,x,0,l); % compute v1-theta1 stiffnessKK(1,3) = int(N1_d2*N3_d2,x,0,l); % compute v1-v2 stiffness
KK(1,4) = int(N1_d2*N4_d2,x,0,l); % compute v1-theta2 stiffness
KK
F.Auricchio (UNIPV) Linear beam March 13, 2014 39 / 80

Beam: a matlab code implementing EB beam FE I
function displ = frame2d_lin(flag)
%===============================================================
% 2D FRAME FINITE ELEMENT PROGRAM% (Euler-Bernoulli and Timoshenko linear beam theories)
% (by A. Reali and F. Auricchio)%---------------------------------------------------------------% SYNTAX: displ = frame2d_lin(flag)
%---------------------------------------------------------------% INPUT
% flag=0 => Euler-Bernoulli beam% flag=1 => Timoshenko beam (linear interpolation)
% flag=2 => Timoshenko beam (linear+linked interpolation)% - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -% nodes.dat:
% ...% x y bc
% ...%% (bc=0 => free, bc=1 => clamped)
% - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -% elements.dat:
% Euler-Bernoulli beam:% ...
% node1 node2 E A I% ...%
F.Auricchio (UNIPV) Linear beam March 13, 2014 40 / 80

Beam: a matlab code implementing EB beam FE II
% Timoshenko beam:% ...
% node1 node2 E A I G k% ...
% - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -% loads.dat:
% ...% loadednode Fx Fy Mz% ...
%---------------------------------------------------------------% OUTPUT
% displ:% ...% ux uy thetaz
% ...%===============================================================
% load mesh data and material properties
load nodes.datload elements.datload loads.dat
echo = 0; % set input echo: 0=>off 1=>on
% print mesh data and material parametersif (echo == 1)
nodeselements
F.Auricchio (UNIPV) Linear beam March 13, 2014 41 / 80

Beam: a matlab code implementing EB beam FE III
loadsend
nnod = size(nodes,1);
nel = size(elements,1);nload = size(loads,1);
% find active nodesactive = find(nodes(:,3) == 0);
nact = length(active);ndof = 3*nact;
if (echo == 1)active % print active nodes
end
% inizializationsk_gl = zeros(ndof);
f_gl = zeros(ndof,1);displ = zeros(nnod,3);
for i = 1:nload % loop over loaded nodes to form r-h-s vectorii = find(active == loads(i,1));
if isempty(ii)== 0f_gl((3*ii-2):(3*ii)) = loads(i,2:4);
end
end
F.Auricchio (UNIPV) Linear beam March 13, 2014 42 / 80

Beam: a matlab code implementing EB beam FE IV
for i = 1:nel % loop over elementsnodes_el = nodes(elements(i,1:2),1:2) ;
% compute element stiffnessif flag == 0
k_el = EB_k_el(elements(i,3:5),nodes_el);else
k_el = T_k_el(elements(i,3:7),nodes_el,flag);
end% assemble into global stiffness
k_gl = k_assembl(k_el,k_gl,elements(i,1:2),active);end
u_gl = k_gl\f_gl; % solve the linear system by gaussian eliminationdispl(active,:) = reshape(u_gl,3,nact)’;
F.Auricchio (UNIPV) Linear beam March 13, 2014 43 / 80

Beam: a matlab code implementing EB beam FE I
function k_el = EB_k_el(element,nodes)
% compute the Euler-Bernoulli element stiffness matrix
% set element nodes and material properties
P1 = nodes(1,:);P2 = nodes(2,:);
E = element(1);A = element(2);
I = element(3);%G = element(4);%k = element(5);
L = norm(P2-P1); % compute beam length
e1 = (P2 - P1)’/L; % compute 1st local axis coincident with beam axise1(3) = 0;
e3 = [0;0;1]; % set 3rd local axis coincident with global z axise2 = cross(e3,e1); % compute second local axis as e3xe1
% construct element submatricesk_axial = E*A/L*[1 -1; -1 1];
a1 = 12/L^3;a2 = 6/L^2;a3 = 4/L;
a4 = a3/2;k_bend = E*I*[a1 a2 -a1 a2;
a2 a3 -a2 a4;-a1 -a2 a1 -a2;
F.Auricchio (UNIPV) Linear beam March 13, 2014 44 / 80

Beam: a matlab code implementing EB beam FE II
a2 a4 -a2 a3];
% construct the element stiffnessk_el = zeros(6);
k_el([1 4],[1 4]) = k_axial;k_el([2 3 5 6],[2 3 5 6]) = k_bend;
% rotate from local to global axese1 = e1(1:2);
e2 = e2(1:2);E1 = [1 0];E2 = [0 1];
R = [E1*e1 E2*e1 0; E1*e2 E2*e2 0; 0 0 1];k_el = [R zeros(3); zeros(3) R]’*k_el*[R zeros(3); zeros(3) R];
F.Auricchio (UNIPV) Linear beam March 13, 2014 45 / 80

Beam: a matlab code implementing EB beam FE I
function k_gl = k_assembl(k_el,k_gl,element,active)% assemble the local matrix k_el into the global one k_gl
% check if the element nodes are active or constrainedi1 = find(active == element(1));
i2 = find(active == element(2));
if isempty(i1)
index1_gl = [];index1_loc = [];
elseindex1_gl = (3*i1-2):(3*i1);
index1_loc = 1:3;end
if isempty(i2)index2_gl = [];
index2_loc = [];else
index2_gl = (3*i2-2):(3*i2);
index2_loc = 4:6;end
% set global and local indices
index_gl = [index1_gl,index2_gl];index_loc = [index1_loc,index2_loc];
F.Auricchio (UNIPV) Linear beam March 13, 2014 46 / 80

Beam: a matlab code implementing EB beam FE II
% assemble k_el into k_glk_gl(index_gl,index_gl) = k_gl(index_gl,index_gl) +...
k_el(index_loc,index_loc);
F.Auricchio (UNIPV) Linear beam March 13, 2014 47 / 80

Beam: standard element I
Advantages:
◦ For the case of concentrated loads (forces and moments) the presented element givesexact solutions
Disadvantages:
◦ Require the use of high-order shape functions (continuous with the first derivative) ⇒difficult to generalize to plate / shell problems
◦ Impossible to extend to the case of non-linear problems
� Exercise. Consider the case of a cantilever beam loaded with a end moment. Compute theEuler-Bernoulli analytical solution in terms of displacement and rotation and compare it with thefinite-element solution for the case of 1 element and for the case of 10 elements.
� Exercise. Consider the case of a cantilever beam loaded with a end force. Compute the Euler-Bernoullianalytical solution in terms of displacement and rotation and compare it with the finite-element solutionfor the case of 1 element and for the case of 10 elements.
� Exercise. Consider the case of a cantilever beam loaded with a distributed transverse force. Compute theEuler-Bernoulli analytical solution in terms of displacement and rotation and compare it with thefinite-element solution for the case of 1 element and for the case of 10 elements.
F.Auricchio (UNIPV) Linear beam March 13, 2014 48 / 80

Timoshenko beam: differential eqns I
Timoshenko beam: beam with shear deformation
Plane sections normal to beam axis remain plane but notnecesseraly normal to axis during the deformation
γ 6= 0 ⇒ θ 6= v′
F.Auricchio (UNIPV) Linear beam March 13, 2014 49 / 80

Timoshenko beam: weak form I
To obtain an integral (weak) form for Timoshenko beam use a potential energyapproach
Total Potential Energy obtained summing energy associated to bending, energyassociated to shear and potential Πext associated to external forces
Π(v , θ) =1
2
∫
l
[EIχ
2]dx +
1
2
∫
l
[κGAγ
2]dx − Πext
◦ We recall that{
χ(θ) = θ′
γ(v , θ) = v ′ − θ
henceΠ = Π(χ(θ), γ(v , θ)) = Π(v , θ)
Equilibrium equations obtained requiring stationarity of total potential energy
◦ Total potential energy is a functional, i.e.
Π : {v(x), θ(x)} → Π ∈ R with
{v(x) : x ∈ R → v(x) ∈ R
θ(x) : x ∈ R → θ(x) ∈ R
F.Auricchio (UNIPV) Linear beam March 13, 2014 50 / 80

Stationarity conditions I
Real function f : x ∈ R → R
Stationarity of f obtained requiring that the function derivative is null, i.e.
df = 0 ⇔df
dx= 0
◦ Derivative definition. The derivative f ′ of a function f in a point x0 is defined as:
f ′(x0) =df
dx
∣
∣
∣
∣
x0
= limǫ→0
f (x0 + ǫ)− f (x0)
ǫ
◦ Fundamental lemma of differentiation. Suppose that f has a derivative at x0. Then,there exists a function η (defined around 0) such that
f (x0 + h)− f (x0) =[
f ′(x0) + η(ǫ)]
ǫ
Function η is continuous with η(0) = 0.⋆ The previous lemma states that a differentiable function can be approximated by a
linear function whose slope is the derivative
F.Auricchio (UNIPV) Linear beam March 13, 2014 51 / 80

Stationarity conditions I
Real function f : x = {x1, x2} ∈ R2 → R
Stationarity of f obtained requiring that the function differential is null, i.e.
df = 0 ⇔∂f
∂x1=
∂f
∂x2= 0
◦ Directional derivative. Directional derivatives f ,1 and f ,2 are defined as:
f ,1 =∂f
∂x1= lim
ǫ→0
f (x1 + ǫ, x2) − f (x1, x2)
ǫ
f ,2 =∂f
∂x2= lim
ǫ→0
f (x1, x2 + ǫ)− f (x1, x2)
ǫ
◦ Fundamental lemma of differentiation. Suppose that f has continuous directionalderivatives in x. Then, f is continuous; moreover, ∃ functions η1, η2 continuous at 0with η1(0) = η2(0) = 0 s.t.
f (x+ h) − f (x) =2
∑
i=1
[f ,i (x) + ηi (h)] hi
with h = {h1, h2}.
F.Auricchio (UNIPV) Linear beam March 13, 2014 52 / 80

Stationarity conditions I
⋆ The above lemma states that every function with continuous directional derivativescan be approximated by a linear function
f (x+ h)− f (x) =
2∑
i=1
[f ,i (x) + ηi (h)] hi
⋆ Moreover:
f (x+ h) = f (x) +2∑
i=1
[f ,i (x)hi ] +2∑
i=1
[ηi (h)hi ]
= f (x) + Df (x) [h] + o(h)
Differential. A function f is differentiable if ∃ a linear transformation Df : R2 → R2
s.t.f (x+ h) = f (x) + Df (x) [h] + o(h)
as h → 0
If the differential Df (x) exists, it is unique and defined as:
Df (x)[h] = limα→0
f (x+ αh)− f (x)
α=
[d
dαf (x+ αh)
]
α=0
F.Auricchio (UNIPV) Linear beam March 13, 2014 53 / 80

Stationarity conditions I
Functional F is a real valued function whose domain is a set of real functions
F : v(x) → R
In generalF : v ∈ V → R
with V vector space
Stationarity of functional F obtained requiring variations of F (or the differential) tobe identically null, i.e.
DF (v)[u] = 0 (12)
for all possible variations u !!!
◦ Recall that
DF (v)[u] = limα→0
F (v + αu) − F (v)
α=
[
d
dαF (v + αu)
]
α=0
◦ Sometimes it is common the following notation
DF (v)[δv]
with δv indicated as variations
F.Auricchio (UNIPV) Linear beam March 13, 2014 54 / 80

Timoshenko beam: weak form I
Taking the variations we get the weak form associated to the Timoshenko beam
dΠ(v , θ)[δv , δθ] =
∫
l
[δχEIχ] dx +
∫
l
[δγκGAγ] dx − δΠext = 0 (13)
where
χ = θ′
δχ = [δθ]′
γ = v′ − θ
δγ = [δv ]′ − δθ
Functions δθ and δv play the role of weight functions
Since Equation 13 has to be satisfied for all possible variations, we can write
{dΠ(v , θ)[0, δθ] =0
dΠ(v , θ)[δv , 0] =0
F.Auricchio (UNIPV) Linear beam March 13, 2014 55 / 80

Timoshenko beam: weak form I
∫
l
[δθ
′
EIθ′]dx −
∫
l
[δθκGA
(v′ − θ
)]dx = 0
∫
l
[δv
′κGA
(v′ − θ
)]dx − δΠext = 0
(14)
◦ We can start from Equation 14 to develop a Timoshenko FE beam model
� Exercise. Discuss that Equation 131 can be interpreted as a rotational equilibrium equation and Equation132 can be interpreted as a translational equilibrium equation. In particular, you can rewrite them as:
∫
l
[
δθ′M
]
dx −
∫
l
[δθS] dx = 0
∫
l
[
δv′
S]
dx − δΠext
= 0
recalling that:M = EIθ
′ , S = κGA(
v′ − θ
)
� Exercise. Derive the strong form of the equations associated to the functional introduced above. Dothey correspond to a Timoshenko beam problem?
F.Auricchio (UNIPV) Linear beam March 13, 2014 56 / 80

Timoshenko beam: approximation I
Introduce an approximation
v ≈nv∑
a=1
Nva va δv ≈
nv∑
a=1
Nva δva
θ ≈nθ∑
a=1
Nθ
a θa δθ ≈nθ∑
a=1
Nθ
a δθa
where nv and nθ can differ
Accordingly:
χ = θ′ ≈
[nθ∑
a=1
Nθ
a θa
]′
=nθ∑
a=1
(N
θ
a
)′
θa
γ = v′ − θ ≈
[nv∑
a=1
Nva va
]′
−
[nθ∑
a=1
Nθ
a θa
]
=
[nv∑
a=1
(Nva )
′
va
]−
[nθ∑
a=1
Nθ
a θa
]
Similar developments for weight functions δχ and δγ
F.Auricchio (UNIPV) Linear beam March 13, 2014 57 / 80

Timoshenko beam: approximation I
In a matrix format
v ≈nv∑
a=1
Nva va = N
vv
θ ≈nθ∑
a=1
Nθ
a θa = Nθθ
with
v = [v1, v2, . . . , vnv ]T
θ =[θ1, θ2, . . . , θnθ
]T
Nv = [Nv
1 ,Nv2 , . . . ,N
vnv ]
Nθ =
[N
θ
1 ,Nθ
2 , . . . ,Nθ
nθ
]
Note that◦ for notational simplicity we indicate with v and θ the nodal dofs corresponding
respectively to the transverse displacement and to the rotation
◦ similar considerations apply to δv and δθ
F.Auricchio (UNIPV) Linear beam March 13, 2014 58 / 80

Timoshenko beam: approximation I
Accordingly:
χ = θ′ ≈
nθ∑
a=1
(N
θ
a
)′
θa = Bθθ
γ = v′ − θ ≈
[nv∑
a=1
(Nva )
′
va
]−
[nθ∑
a=1
Nθ
a θa
]= B
vv −N
θθ
with
v = [v1, v2, . . . , vnv ]T
θ =[θ1, θ2, . . . , θnθ
]T
Nθ =
[N
θ
1 ,Nθ
2 , . . . ,Nθ
nθ
]
Bθ =
[(N
θ
1
)′
,(N
θ
2
)′
, . . . ,(N
θ
nθ
)′]
Bv =
[(Nv
1 )′
, (Nv2 )
′
, . . . , (Nvnv )
′]
Similar developments for the weight functions:{
δχ = Bθδθ
δγ = Bvδv−N
θδθ
F.Auricchio (UNIPV) Linear beam March 13, 2014 59 / 80

Timoshenko beam: approximation I
Introduce approximations in the weak form 13 (and not – also if equivalent – inweak form variation 14) :∫
l
[(B
θδθ
)EIB
θθ
]dx +
∫
l
[(B
vδv−N
θδθ
)κGA
(B
vv−N
θθ
)]dx − δΠext = 0
Rearranging terms, we get:
(δθ
)T∫
l
[(B
θ
)T
EIBθθ
]dx−
(δθ
)T∫
l
[(N
θ
)T
κGA(B
vv−N
θθ
)]dx+
(δv)T∫
l
[(Bv )
TκGA
(B
vv −N
θθ
)]dx − δΠext = 0
Arbitrariness of δθ and of δv imply:
∫
l
[(B
θ
)T
EIBθθ
]dx −
∫
l
[(N
θ
)T
κGA(B
vv−N
θθ
)]dx − .... = 0
∫
l
[(Bv )
TκGA
(B
vv−N
θθ
)]dx − ..... = 0
F.Auricchio (UNIPV) Linear beam March 13, 2014 60 / 80

Timoshenko beam: approximation I
This is a set of two matrix equations
Ku = f
more explicitly K
θθK
θv
(K
θv)T
Kvv
{θ
v
}=
{0
....
}
where
Kθθ =
∫
l
[(B
θ
)T
EIBθ
]dx +
∫
l
[(N
θ
)T
κGANθ
]dx
Kθv =−
∫
l
[(N
θ
)T
κGABv
]dx
Kvv =
∫
l
[(Bv)
TκGAB
v]dx
As usual we can introduce element point of view → element stiffness matrices
F.Auricchio (UNIPV) Linear beam March 13, 2014 61 / 80

Timoshenko beam I
Advantages:
◦ The element takes into account shear deformation ⇒ possible to study a wider rangeof problems
◦ Require the use of low-order shape functions (discontinuous first derivatives) ⇒ easyto generalize to plate / shell problems
Disadvantages:
◦ For the case of concentrated loads (forces and moments) in general Timoshenkoelements do not give exact solutions
◦ Impossible to extend to the case of non-linear problems
F.Auricchio (UNIPV) Linear beam March 13, 2014 62 / 80

Timoshenko beam: linear approx I
Simplest choice
◦ two node element◦ two dofs per node: 1 transv. displ. + 1 rotation◦ linear approximations for all the fields, i.e.
{
v = Nv
θ = Nθ
with
N =[
1−x
l,
x
l
]
Accordingly:
B =
[−1
l,
1
l
]
� Exercise. Compute in close form the element stiffness matrix for the Timoshenko beam considered above.
� Exercise. Code the element and test it solving cantilever beam problems either with an end moment orwith an end load.
� Exercise. Consider the case of a cantilever beam loaded with a end moment and the case of a cantileverbeam loaded with a end force. Compute the Euler-Bernoulli analytical solution in terms of displacementand rotation and compare it with the finite-element solution for the case of 1 element, 10 elements, 100elements. Discuss the results. Diagram all the quantities of interest and discuss possible requirements onthe finite element scheme.
� Exercise. Consider a series of cantilever beam problems in which the beam is progressively more andmore slender. Load the cantilevers first with an end moment and then with an end load.
F.Auricchio (UNIPV) Linear beam March 13, 2014 63 / 80

Timoshenko beam: a matlab code to compute standard element stiffness I
function k_el = T_k_el(element,nodes,flag)% compute the Timoshenko element stiffness matrix% flag=1 => linear interpolations
% flag=2 => linear+linked interpolations (not active, so far!)
% set element nodes and material propertiesP1 = nodes(1,:);P2 = nodes(2,:);
E = element(1);A = element(2);
I = element(3);G = element(4);
k = element(5);
L = norm(P2-P1); % compute beam length
e1 = (P2 - P1)’/L; % compute 1st local axis coincident with beam axise1(3) = 0;
e3 = [0;0;1]; % set 3rd local axis coincident with global z axise2 = cross(e3,e1); % compute second local axis as e3xe1
% construct element submatricesk_uu = E*A/L*[1 -1; -1 1];
k_vv = k*G*A/L*[1 -1; -1 1];k_tt = E*I/L*[1 -1; -1 1] + k*G*A*L/3*[1 .5; .5 1];
k_tv = k*G*A*[.5 -.5; .5 -.5];
% construct the element stiffness
F.Auricchio (UNIPV) Linear beam March 13, 2014 64 / 80

Timoshenko beam: a matlab code to compute standard element stiffness II
k_el = zeros(6);k_el([1 4],[1 4]) = k_uu;
k_el([2 5],[2 5]) = k_vv;k_el([3 6],[3 6]) = k_tt;
k_el([3 6],[2 5]) = k_tv;k_el([2 5],[3 6]) = k_tv’;
% rotate from local to global axese1 = e1(1:2);
e2 = e2(1:2);E1 = [1 0];E2 = [0 1];
R = [E1*e1 E2*e1 0; E1*e2 E2*e2 0; 0 0 1];k_el = [R zeros(3); zeros(3) R]’*k_el*[R zeros(3); zeros(3) R];
F.Auricchio (UNIPV) Linear beam March 13, 2014 65 / 80

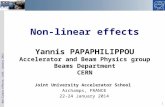
Timoshenko beam: locking problems I
Structural Finite Elements Manfred Bischoff, IBB, Uni Stuttgart April 16, 2012 19/40
Numerical Experiments thick beam, Bernoulli beam elements
1.0E-09
1.0E-08
1.0E-07
1.0E-06
1.0E-05
1.0E-04
1.0E-03
1.0E-02
1.0E-01
1.0E+00
1.0E+01
1 10 100 1000
O(-4)
V (shear force)
! (strain energy)
relative
error
O(-2)
O(-1)
M (bending moment)
d.o.f
F.Auricchio (UNIPV) Linear beam March 13, 2014 66 / 80

Timoshenko beam: locking problems II
Structural Finite Elements Manfred Bischoff, IBB, Uni Stuttgart April 16, 2012 20/40
Numerical Experiments thick beam, Timoshenko beam elements
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
1,0E+00
1,0E+01
1,0E+02
1 10 100 1000 10000
O(-2)
O(-1)
d.o.f.
! (rotation)
w (displacement)
V (shear force)
! (strain energy)
M (bending moment)
relative
error
F.Auricchio (UNIPV) Linear beam March 13, 2014 67 / 80

Timoshenko beam: locking problems III
Structural Finite Elements Manfred Bischoff, IBB, Uni Stuttgart April 16, 2012 21/40
Numerical Experiments thin beam, Timoshenko beam elements
1,0E-07
1,0E-06
1,0E-05
1,0E-04
1,0E-03
1,0E-02
1,0E-01
1,0E+00
1,0E+01
1,0E+02
1 10 100 1000 10000
O(-2)
O(-1)
d.o.f.
! (rotation)
w (displacements)
V (shear force)
! (strain energy)
M (bending moment)
relative
error
F.Auricchio (UNIPV) Linear beam March 13, 2014 68 / 80

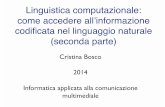
Timoshenko beam: locking problems IV
Structural Finite Elements Manfred Bischoff, IBB, Uni Stuttgart April 16, 2012 22/40
Numerical Experiments thin beam, reduced integration (Timoshenko)
1.0E-07
1.0E-06
1.0E-05
1.0E-04
1.0E-03
1.0E-02
1.0E-01
1.0E+00
1.0E+01
1.0E+02
1 10 100 1000 10000
O(-2)
O(-1)
d.o.f.
! (rotation)
w (displacement)
V (shear force)
! (strain energy)
M (bending moment)
relative
error
F.Auricchio (UNIPV) Linear beam March 13, 2014 69 / 80

Timoshenko beam: locking problems V
Compute the shear deformation for the beam under investigation
γ =Bv −Nθ
=
(−1
lv1 +
1
lv2
)−
[(1−
x
l
)θ1 +
x
lθ2
]
=−x
l
(θ2 − θ1
)−
[v1 − v2
l+ θ1
]
In a more simple formγ = c1x + c0
with c1 and c0 constants
In the limiting case of thin beam, Timoshenko model should recover Euler Bernoullimodel
γ → 0 ⇒
{c1 = 0
c0 = 0
These conditions result in a over-stiffening of the element, i.e. LOCKING
The locking is due to the presence of constraint which we are not properly satisfiedusing the chosen interpolations
F.Auricchio (UNIPV) Linear beam March 13, 2014 70 / 80

Timoshenko beam: linear + linked I
Second possible choice
◦ two node element◦ two dofs per node: 1 transv. displ. + 1 rotation◦ linear approximation for θ-field◦ linear approximation + linked term for v -field
v = Nv + Nb
(
θ1 − θ2
)
l
θ = Nθ
with
N =[(
1−x
l
)
,x
l
]
Nb =1
2
(
1−x
l
) x
l
⋆ Linked because it links v-field to θ-field
⋆ Nb bubble function
F.Auricchio (UNIPV) Linear beam March 13, 2014 71 / 80

Timoshenko beam: linear + linked I
� Exercise. Compute γ for the Timoshenko beam considered above and compare it with the case of linearelement.
� Exercise. Compute in close form the element stiffness matrix for the Timoshenko beam considered above.
� Exercise. Code the element and test it solving cantilever beam problems either with an end moment orwith an end load.
� Exercise. Consider a series of cantilever beam problems in which the beam is progressively slender andslender. Load the cantilevers either with an end moment or with an end load.
F.Auricchio (UNIPV) Linear beam March 13, 2014 72 / 80

Timoshenko beam: mixed approach I
As integral form we can use a mixed functional [Hellinger-Reisser functional]
Π(v , θ, S) =1
2
∫
l
[EIχ
2]dx −
1
2
∫
l
[(κGA)−1
S2]dx
+
∫
l
[S(v′ − θ
)]dx − Πext
where◦ Πext is the potential associated to the external forces◦ the curvature is always function of the rotation
χ = θ′
� Exercise. Compute the stationarity conditions for Hellinger-Reissner principle and the corresponding
strong form equations. Comment on the obtained strong form conditions.
F.Auricchio (UNIPV) Linear beam March 13, 2014 73 / 80

Timoshenko beam: mixed approach II
Simplest choice for mixed functional
⋆ piecewise linear (continuous) displacement/rotation fields:
◦ two node element◦ two dofs per node: 1 transv. displ. + 1 rotation
{
v = Nv
θ = Nθ
with
N =[
1−x
l,
x
l
]
⋆ constant approximation for shear force:
◦ one internal node◦ one dof per node
S = NS S = S
F.Auricchio (UNIPV) Linear beam March 13, 2014 74 / 80

Timoshenko beam: mixed approach III
� Exercise. Compute in close form the element stiffness matrix for the Timoshenko beam consideredabove. Compare this stiffness matrix with the one obtained from the linked approach.
� Exercise. Compute in close form the element stiffness matrix for the Timoshenko beam considered aboveand perform a static condensation of the local shear dof. Compare this stiffness matrix with the oneobtained from the linked approach.
� Exercise. Code the element and test it solving cantilever beam problems either with an end moment orwith an end load.
� Exercise. Consider a series of cantilever beam problems in which the beam is progressively slender and
slender. Load the cantilevers either with an end moment or with an end load.
F.Auricchio (UNIPV) Linear beam March 13, 2014 75 / 80

Timoshenko beam: mixed approach & static condensation I
Write explicitly equation system for mixed formulation:
Kθθ
0 KθS
0 0 KvS
(K
θS)T (
KvS)T
− KSS
θ
v
S
=
0
....
0
where
Kθθ =
∫
l
[(B
θ
)T
EIBθ
]dx
KSS =
∫
l
[(NS )
T 1
κGANS
]dx
KθS =
∫
l
[(N
θ
)T
NS
]dx
KvS =−
∫
l
[(Bv )
TNS
]dx
F.Auricchio (UNIPV) Linear beam March 13, 2014 76 / 80

Timoshenko beam: mixed approach & static condensation II
Solve last equation wrt S
(K
θS)T
θ +(K
vS)T
v− KSSS = 0
Therefore:
S =(K
SS)−1
[(K
θS)T
θ +(K
vS)T
v
]
Hence:Kθθ Kθv
(Kθv
)T
Kvv
{θ
v
}=
{0
....
}
where
Kθθ =Kθθ +
(K
SS)−1 (
KθS)T
Kθv =KθS
(K
SS)−1 (
KvS)T
Kvv =KvS
(K
SS)−1 (
KvS)T
F.Auricchio (UNIPV) Linear beam March 13, 2014 77 / 80

Timoshenko beam: enhanced approach I
Start from a total potential energy approach (displacement based approach)
Π(v , θ) =1
2
∫
l
[EIχ
2]dx +
1
2
∫
l
[κGAγ
2]dx − Πext
◦ Enhance strain field (i.e., the one suffering locking) with a unknown field γ
{χ(θ) = θ
′
γ(v , θ, γ) = v′ − θ + γ
◦ Hence
Π = Π(v , θ, γ)
⋆ Possible to take variation wrt v , θ, γ
F.Auricchio (UNIPV) Linear beam March 13, 2014 78 / 80

Timoshenko beam: enhanced approach II
Simplest choice for enhanced approach
⋆ Piecewise linear (continuous) displacement/rotation fields:
◦ two node element◦ two dofs per node: 1 transv. displ. + 1 rotation
{
v = Nv
θ = Nθ
with
N =[
1−x
l,
x
l
]
⋆ Linear enhanced shear strain field
γ = x γ
◦ like having one internal node with one dof per node◦ one dof per node
X Possible as usual to perform static condensation of internal dof
X Also other possible approaches are possibles (e.g., under-integration, assumed strain)
F.Auricchio (UNIPV) Linear beam March 13, 2014 79 / 80

Further readings I
O.C.Zienkiewicz and R.L.Taylor, “The Finite Element Method”,Butterworth-Heinemann (2005), vol. 2chapter 10
E. Onate, Structural Analysis with the Finite Element Method. Linear Statics:Volume 2: Beams, Plates and Shells, Springer (2013)chapters 1 & 2
F.Auricchio (UNIPV) Linear beam March 13, 2014 80 / 80