Introduction Ansys
14
Chapter 1 INTRODUCTION 1.1 Concept The Finite Element Analysis (PEA) method, originally introduced by Turner et al. (1956), is a powerful computational technique for approximate solu- tions to a variety of "real-world" engineering problems having complex domains subjected to general boundary conditions. PEA has become an essential step in the design or modeling of a physical phenomenon in vari- ous engineering disciplines. A physical phenomenon usually occurs in a continuum of matter (solid, liquid, or gas) involving several field variables. The field variables vary from point to point, thus possessing an infinite number of solutions in the domain . Within the scope of this book, a continuum with a known boundary is called a domain. The basis of PEA relies on the decomposition of the domain into a finite number of subdomains (elements) for which the systematic approximate solution is constructed by applying the variational or weighted residual methods . In effect, FEA reduces the problem to that of a finite number of unknowns by dividing the domain into elements and by expressing the unknown field variable in terms of the assumed approximating functions within each element. These functions (also called interpolation functions) are defined in terms of the values of the field variables at specific points, referred to as nodes. Nodes are usually located along the element bound - aries, and they connect adjacent elements. The ability to discretize the irregular domains with finite elements makes the method a valuable and practical analysis tool for the solution of boundary, initial, and eigenvalue problems arising in various engineering disciplines. Since its inception, many technical papers and books have appeared on the development and application of FEA. The books by Desai and Abel (1971), Oden (1972), Gallagher (1975), Huebner (1975), Bathe and Wilson (1976), Ziekiewicz (1977), Cook (1981), and Bathe (1996) have influenced the current state of PEA. Representative common engineering problems and their corresponding PEA discretizations are illustrated in Fig. 1.1.
description
This is a Introduction in MEF
Transcript of Introduction Ansys

Chapter 1
INTRODUCTION
1.1 Concept
The Finite Element Analysis (PEA) method, originally introduced by Turneret al. (1956), is a powerful computational technique for approximate solutions to a variety of "real-world" engineering problems having complexdomains subjected to general boundary conditions. PEA has become anessential step in the design or modeling of a physical phenomenon in various engineering disciplines. A physical phenomenon usually occurs in acontinuum of matter (solid, liquid, or gas) involving several field variables.The field variables vary from point to point, thus possessing an infinitenumber of solutions in the domain . Within the scope of this book, acontinuum with a known boundary is called a domain .
The basis of PEA relies on the decomposition of the domain into a finitenumber of subdomains (elements) for which the systematic approximatesolution is constructed by apply ing the variational or weighted residualmethods . In effect, FEA reduces the problem to that of a finite number ofunknowns by dividing the domain into elements and by expressing theunknown field variable in terms of the assumed approximating functionswithin each element. These functions (also called interpolation functions)are defined in terms of the values of the field variables at specific points,referred to as nodes. Nodes are usually located along the element bound aries, and they connect adjacent elements.
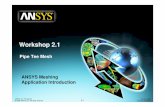
The ability to discretize the irregular domains with finite elements makes themethod a valuable and practical analysis tool for the solution of boundary,initial , and eigenvalue problems arising in various engineering disciplines.Since its inception, many technical papers and books have appeared on thedevelopment and application of FEA. The books by Desai and Abel (1971),Oden (1972), Gallagher (1975), Huebner (1975), Bathe and Wilson (1976),Ziekiewicz (1977), Cook (1981), and Bathe (1996) have influenced thecurrent state of PEA. Representative common engineering problems andtheir corresponding PEA discretizations are illustrated in Fig. 1.1.

2
oo
f-f--
f-f---
elastic plate
I _. ~ t
/symmetry line
FEM WITH ANSY~
steam pipe
8insulation
stream line\ ,
symmetry . >"nodesline ". . / / /
• ,\',Y'. ambient./ , .. / -
...:,.(1".,. temp,steam~·.a= l: l -:::::e l ementstemp, .-1-;-. - .
r l 'symmetry IDC
flow around pipe
Fig. 1.1 PEA representation of practical engineering problems.
The finite element analysis method requires the following major steps :
• Discretization of the domain into a finite number of subdomains (ele-ments).
• Selection of interpolation function s.• Development of the element matrix for the subdomain (element).• Assembly of the element matrices for each subdomain to obtain the global
matrix for the entire domain.• Imposition of the boundary conditions.• Solution of equations.• Additional computations (if desired).
There are three main approaches to constructing an approximate solutionbased on the concept of FEA:
Direct Approach: This approach is used for relatively simple problems,and it usually serves as a means to explain the concept of PEA and itsimportant steps (discussed in Sec. 1.4).

INTRODUCTION 3
Weighted Residuals: This is a versatile method, allowing the applica tion of PEA to problems whose functionals cannot be constructed. Thisapproach directly utilizes the governing differential equations, such asthose of heat transfer and fluid mechanics (discussed in Sec. 6.1).
Variational Approach: This approach relies on the calculus of variations, which involves extremizing a functional. This functional corresponds to the potential energy in structural mechanics (discussed in Sec.6.2).
In matrix notation, the global system of equations can be cast into
Ku=F (1.1)
where K is the system stiffness matrix, u is the vector of unknowns, andF is the force vector . Depending on the nature of the problem, K may bedependent on u, i.e., K = K(u) and F may be time dependent, i.e.,F=F(t) .
1.2 Nodes
As shown in Fig. 1.2, the transformation of the practical engineering problem to a mathematical representation is achieved by discretizing the domainof interest into elements (subdomains). These elements are connected toeach other by their "common" nodes. A node specifies the coordinatelocation in space where degrees of freedom and actions of the physicalproblem exist. The nodal unknown(s) in the matrix system of equationsrepresents one (or more) of the primary field variables. Nodal variablesassigned to an element are called the degrees of freedom of the element.
The common nodes shown in Fig. 1.2 provide continuity for the nodalvariables (degrees of freedom). Degrees of freedom (DOF) of a node aredictated by the physical nature of the problem and the element type. Table1.1 presents the DOF and corresponding "forces" used in PEA for differentphysical problems .
O~ommon(x" y ,) (x", y,,) common nodes
commonnodes
nodes
Fig. 1.2 Division of a domain into subdomains (elements).

4 FEM WITH ANSYS@
Table 1.1 Degrees of freedom and force vectors inPEA for different engineering disciplines.
Discipline DOF Force VectorStructural/solids Displacement Mechanical forcesHeat conduction Temperature Heat fluxAcoustic fluid Displacement potential Particle velocityPotential flow Pressure Particle velocityGeneral flows Velocity FluxesElectrostatics Electric potential Charge density
Magnetostatics Magnetic potential Magnetic intensity
1.3 Elements
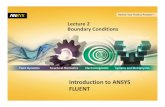
Depending on the geometry and the physical nature of the problem, thedomain of interest can be discretized by employing line, area, or volumeelements. Some of the common elements in PEA are shown in Fig . 1.3.Each element, identified by an element number, is defined by a specificsequence of global node numbers. The specific sequence (usually counterclockwise) is based on the node numbering at the element level. The nodenumbering sequence for the elements shown in Fig . 1.4 are presented inTable 1.2.
I' , 2line element
~.. ~4' 3.. I'.:..4········ " . 2 .,/ 7... 2 -, ..
~ , .c,Y,z z
triangular
tetrahedra l
rec tangular
area elements
right prism
volume elements
z
quadrila tera l
{j174 ..
5 . .' 6/ 3'.
y I ./
J---. x 2
irregular hexahedal
Fig. 1.3 Description of line, area, and volume elements with nodenumbers at the element level.

INTRODUCTION
7
globa l nodenumber6 -------'5 4
local nodenumber
3 3 <, 2
5
Fig. 1.4 Discretization of a domain: element and node numbering.
Table 1.2 Description of numbering at the element level.
ElementNode 1 Node 2 Node 3 Node 4Number
1 1 2 6 72 3 4 6 23 4 5 6
1.4 Direct Approach
Although the direct approach is suitable for simple problems, it involveseach fundamental step of a typical finite element analysis . Therefore, thisapproach is demonstrated by considering a linear spring system and heatflow in a one-dimensional (I -D) domain.
1.4.1 Linear Spring
As shown in Fig. 1.5, a linear spring with stiffness k has two nodes. Eachnode is subjected to axial loads of fi and h, resulting in displacements ofu\ and u2 in their defined positive directions.
Subjected to these nodal forces, the resulting deformation of the springbecomes
(1.2)
k 2
-~--x~.U , h.~
Fig. 1.5 Free-body diagram of a linear spring element.

6
which is related to the force acting on the spring by
The equilibrium of forces requires that
which yields
FEM WITH ANSYS®
(1.3)
(1.4)
(1.5)
Combining Eq. (1.3) and (1.5) and rewriting the resulting equations inmatrix form yield
(1.6)
in which u(e) is the vector of nodal unknowns representing displacementand k(e) and r(e) are referred to as the element characteristic (stiffness)matrix and element right-hand-side (force) vector, respectively. The superscript (e) denotes the element numbered as ' e ' .
The stiffness matrix can be expressed in indicial form as ki)e)
(1.7)
where the subscripts i and j (i, j =1,2) are the row and the columnnumbers . The coefficients, kOe
) , may be interpreted as the force required atnode i to produce a unit displacement at node j while all the other nodesare fixed.
1.4.2 Heat Flow
Uniform heat flow through the thickness of a domain whose in-planedimensions are long in comparison to its thickness can be considered as aone-dimensional analysis. The cross section of such a domain is shown inFig. 1.6. In accordance with Fourier's Law, the rate of heat flow per unitarea in the x -direction can be written as
dBq=-kA-
dx(1.8)

INTRODUCTION 7
-x
2.------- ..~
(J2
I~L
.....
1
-r>::»(JI
ql
Fig. 1.6 One-dimensional heat flow.
where A is the area normal to the heat flow, 8 is the temperature, and k isthe coefficient of thermal conductivity. For constant k, Eq. (1.8) can berewritten as
fJ.8q=-kA-
L(1.9)
in which fJ.8 =82 - 81 denotes the temperature drop across the thicknessdenoted by L of the domain.
As illustrated in Fig. 1.6, the nodal flux (heat flow entering a node) at Node1 becomes
(1.10)
The balance of the heat flux requires that
(1.11)
which yields
(1.12)
Combining Eq. (1.10) and (1.12) and rewriting the resulting equations inmatrix form yield
(1.13)

8 FEM WITH ANSYS@
in which e(e) is the vector of nodal unknowns representing temperature andk(e) and q(e) are referred to as the element characteristic matrix andelement right-hand-side vector, respectively.
1.4.3 Assembly of the Global System of Equations
Modeling an engineering problem with finite elements requires the assemblyof element characteristic (stiffness) matrices and element right-hand-side(force) vectors, leading to the global system of equations
Ku=F (1.14)
in which K is the assembly of element characteristic matrices, referred toas the global system matrix and F is the assembly of element right-handside vectors, referred to as the global right-hand-side (force) vector. Thevector of nodal unknowns is represented by u .
The global system matrix, K, can be obtained from the "expanded"element coefficient matrices, k (e) , by summation in the form
(1.15)
in which the parameter E denotes the total number of elements. The"expanded" element characteristic matrices are the same size as the globalsystem matrix but have rows and columns of zeros corresponding to thenodes not associated with element (e) . The size of the global system matrixis dictated by the highest number among the global node numbers.
Similarly, the global right-hand-side vector, F, can be obtained from the"expanded" element coefficient vectors, f( e), by summation in the form
E
F= If(e)e=l
(1.16)
The "expanded" element right-hand-side vectors are the same size as theglobal right-hand-side vector but have rows of zeros corresponding to thenodes not associated with element (e) . The size of the global right-hand-sidevector is also dictated by the highest number among the global nodenumbers .

INTRODUCTION 9
The explicit steps in the construction of the global system matrix and theglobal right-hand-side-vector are explained by considering the system oflinear springs shown in Fig. 1.7. Associated with element (e), the elementequations for a spring given by Eq. (1.6) are rewritten as
(1.17)
in which k~f) =ki~) =k(e) and kg) =ki~) =_k(e) . The subscripts used inEq. (1.17) correspond to Node 1 and Node 2, the local node numbers ofelement (e). The global node numbers specifying the connectivity amongthe elements for this system of springs is shown in Fig. 1.7, and theconnectivity information is tabulated in Table 1.3.
4p..---'\I\I\J\/'.,...--o--. F
Q)
Fig. 1.7 System of linear springs (top) and correspondingFEA model (bottom).
Table 1.3
ElementNumber
2
3
Table of connectivity.
Local Node Global NodeNumbering Numbering
1 12 2
1 22 3
1 22 3
4 12
34

10 FEM WITH ANSYS@
In accordance with Eq. (1.15), the size of the global system matrix is (4 x 4)
and the specific contribution from each element is captured as
IT] [lJ [] [1]IT] [lJ k(l) k (l) 0 0 IT]
II 12
[ k(l ) k(l7jJ k (l) k(l) 0 0 [lJ == k (l)Element 1: 11 12 ::::::> 21 22 (1.18)k (I) k (I) [lJ 0 0 0 0 []21 22
0 0 0 0 [1]
IT] [lJ [] [1][lJ [] 0 0 0 0 IT]
[ k(2) k(2 )Jill 0 k (2 ) k (2) 0 [lJ == k (2)Element 2: 11 12 ::::::> 11 12 (1.19)k (2) k (2) [] 0 k (2 ) k (2 ) 0 []21 22 21 22
0 0 0 0 [1]
IT] [lJ [] [1][lJ [] 0 0 0 0 IT]
[k (3) k(3) Jill 0 k (3) k (3) 0 [lJ==k (3)Element 3: 11 12 ::::::> II 12 (1.20)k (3) k (3) [] 0 k (3) k (3) 0 []21 22 21 22
0 0 0 0 [1]
IT] [lJ [] [1][] [1] 0 0 0 0 IT]
[ k(4) k(47~] 0 0 0 0[lJ==k (4)Element 4: 11 12 ::::::>
k (4 ) k (4 ) (1.21)k (4) k (4 ) [1] 0 0 []21 22 11 12
0 0 k (4 ) k (4 ) [1]21 22
Performing their assembly leads to
4K =Lk(e) =k (I) +k (2) +k (3) +k (4) (1.22)
e=I
or

INTRODUCTION 11
k (l ) k (l ) 0 0II 12
k(l ) ( k (l ) +k (2) +k (3) ) (k (2) +k (3) ) 021 22 I I II 12 12K= (1.23)
0 (k (2) +k(3) ) ( k (2) +k(3) +k(4) ) k(4)21 21 22 22 II 12
0 0 k (4 ) k (4 )21 22
In accordance with Eq. (1.16), the size of the global right-hand-side vector is(4 x 1) and the specific contribution from each element is captured as
fi (\) illElement 1: {iiI)}ill => Iii) ~ = f(l) (1.24)
Iii) ~ 0 rn0 @]
0 illElement 2:
{J,(2)}[2]=> fi (2) ~= f(2) (1.25)IP) rn IP) rn
0 @]
0 illElement 3:
{J,(3)}[2]=> fi (3) ~ =f(3) (1.26)IP) rn IP) rn
0 @]
0 illr)}~=>
0 ~ = f(4)Element 4: 11(4) (1.27)
l i4) @] rn
li4) @]
Similarly, performing their assembly leads to
4F = Lf(e) = f (l ) + f (2) + f (3) + f (4) (1.28)
e=1
or

12
J,.(I)
Iii) + J,.(Z) + I?)IP) + IP) +1
1(4)
li4)
FEM WITH ANSYS@
(1.29)
Consistent with the assembly of the global system matrix and the globalright-hand-side vector, the vector of unknowns, u , becomes
(I)ul u l
Uz u(l) - u(Z) - u(3)Z - I - I
u= =u3 u(Z) - u(3) - u(4)
Z - Z - I
U4 (4)Uz
(1.30)
1.4.4 Solution of the Global System of Equations
In order for the global system of equations to have a unique solution, thedeterminant of the global system matrix must be nonzero. However, anexamination of the global system matrix reveals that one of its eigenvaluesis zero, thus resulting in a zero determinant or singular matrix. Therefore,the solution is not unique. The eigenvector corresponding to the zero eigenvalue represents the translational mode, and the remaining nonzeroeigenvalues represent all of the deformation modes.
For the specific values of k[f) =ki~) =k(e) and k[~) =ki~) =_k(e) , theglobal system matrix becomes
1 -1 0 0
K=k(e) -1 3 -2 0(1.31)
0 -2 3 -1
0 0 -1 1
with its eigenvalues ~ =0, Az =2, A., =3 - J5, and -14 =3 +J5 . Thecorresponding eigenvectors are

INTRODUCTION 13
1 1 - 1 -1
u (l) = 1u ( 2) = - 1
u (3) = 2-J-su (4 ) = 2+J-s
1,
-1,
-2 + J-s,
-2-J-s(1.32)
1 1 1 1
Each of these eigenvectors represents a possible solution mode. The contribution of each solution mode is illustrated in Fig. 1.8.
In order for the global system of equations to have a unique solution, theglobal system matrix is rendered nonsingul ar by eliminating the zeroeigenvalue . This is achieved by introducing a boundary condition so as tosuppress the translation al mode of the solution corresponding to the zeroeigenvalue.
Q)CD 2 3 ® 4
Cd)I 2 3 4
undeformed • • • •I I I II I I 2 I 3 I 4
mode I I • I • I • I •T , , ,I I I II I 2 I 3 I I 4I I I Imode 2 T • • i • , , •I I I I
I I 2 1: 3
I 4I Imode 3 • . J I. •i ,I I
I I 2 3 I 4I Imode 4 • i • • I •
! I
Fig. 1.8 Possible solution modes for the system of linear springs .
1.4.5 Boundary Conditions
As shown in Fig. 1.7, Node 1 is restrained from displacement. Thisconstraint is satisfied by imposing the boundary condition of ul =0 . Eitherthe nodal displacements, u. , or the nodal forces, / i ' can be specified at agiven node. It is physically impossible to specify both of them as known oras unknown. Therefore, the nodal force /1remains as one of the unknown s.The nodal displacements, u2' u3' and u4 are treated as unknowns, and thecorresponding nodal forces have values of Jz =0, /3=0 , and / 4=F .
These specified values are invoked into the global system of equations as

14 FEM WITH ANSYS®
1 -1 0 0 ul =0 IIk(e)
-1 3 -2 0 Uz I z =0=
0 -2 3 -1 u3 h=O
0 0 -1 1 u4 14 =F
leading to the following equations:
k"H-2
~ll{::}=m3
- 1
and
(1.33)
(1.34)
(1.35)
The coefficient matrix in Eq. (1.34) is no longer singular, and the solutionsto these equations are obtained as
5 FU - - -
4 - 2 k(e)(1.36)
and the unknown nodal force II is determined as II =-F. The finalphysically acceptable solution mode is shown in Fig. 1.9.
There exist systematic approaches to assemble the global coefficient matrixwhile invoking the specified nodal values (Bathe and Wilson 1976; Bathe1996) . The specified nodal variables are eliminated in advance from theglobal system of equations prior to the solution.
4•II 4t •I I1--,
U.( = 2.5 F / kl l' )
3 @ 4
3•II 3I •I I1+--,
U, = 1.5F / k k J
2•II 2J •I I1+-+,
U1
= F / k k J
1undeformed ••----e------e----e
I
physically l.~---___.,r......----___.,r.-._-___.,r.-____eacceptable I
solution mode I
Fig. 1.9 Physically acceptable solution mode for the system oflinear springs.