Edinburgh Research Explorer · 2017. 9. 22. · Correspondent author: Sudip Biswas. This is usually...
16
Edinburgh Research Explorer Robust Transceiver Design in Full-Duplex MIMO Cognitive Radios Citation for published version: Cagatay Cirik, A, Biswas, S, Taghizadeh , O & Ratnarajah, T 2017, 'Robust Transceiver Design in Full- Duplex MIMO Cognitive Radios', IEEE Transactions on Vehicular Technology. https://doi.org/10.1109/TVT.2017.2755665 Digital Object Identifier (DOI): 10.1109/TVT.2017.2755665 Link: Link to publication record in Edinburgh Research Explorer Document Version: Peer reviewed version Published In: IEEE Transactions on Vehicular Technology General rights Copyright for the publications made accessible via the Edinburgh Research Explorer is retained by the author(s) and / or other copyright owners and it is a condition of accessing these publications that users recognise and abide by the legal requirements associated with these rights. Take down policy The University of Edinburgh has made every reasonable effort to ensure that Edinburgh Research Explorer content complies with UK legislation. If you believe that the public display of this file breaches copyright please contact [email protected] providing details, and we will remove access to the work immediately and investigate your claim. Download date: 26. Dec. 2020
Transcript of Edinburgh Research Explorer · 2017. 9. 22. · Correspondent author: Sudip Biswas. This is usually...

Edinburgh Research Explorer
Robust Transceiver Design in Full-Duplex MIMO CognitiveRadios
Citation for published version:Cagatay Cirik, A, Biswas, S, Taghizadeh , O & Ratnarajah, T 2017, 'Robust Transceiver Design in Full-Duplex MIMO Cognitive Radios', IEEE Transactions on Vehicular Technology.https://doi.org/10.1109/TVT.2017.2755665
Digital Object Identifier (DOI):10.1109/TVT.2017.2755665
Link:Link to publication record in Edinburgh Research Explorer
Document Version:Peer reviewed version
Published In:IEEE Transactions on Vehicular Technology
General rightsCopyright for the publications made accessible via the Edinburgh Research Explorer is retained by the author(s)and / or other copyright owners and it is a condition of accessing these publications that users recognise andabide by the legal requirements associated with these rights.
Take down policyThe University of Edinburgh has made every reasonable effort to ensure that Edinburgh Research Explorercontent complies with UK legislation. If you believe that the public display of this file breaches copyright pleasecontact [email protected] providing details, and we will remove access to the work immediately andinvestigate your claim.
Download date: 26. Dec. 2020

1
Robust Transceiver Design in Full-Duplex MIMOCognitive Radios
Ali Cagatay Cirik, Member, IEEE, Sudip Biswas, Member, IEEE,Omid Taghizadeh, Student Member, IEEE and Tharmalingam Ratnarajah, Senior Member, IEEE
Abstract—We consider a full duplex (FD) multiple-inputmultiple-output (MIMO) underlay cognitive radio (CR) cellularnetwork, in which an FD secondary base-station (BS) servesmultiple half-duplex (HD) uplink (UL) and downlink (DL)secondary users (SUs) at the same time and frequency. Weassume that the channel state information (CSI) available at thetransmitters is imperfect, and the errors of the CSI are assumedto be norm bounded. Under the impact of channel uncertainty,we address the sum mean-squared-errors (MSE) minimizationproblem subject to individual power constraints at the UL SUs,a total power-constraint at the secondary BS, and the interferenceconstraints on the primary users (PUs) by the secondary network.By transforming the problem into an equivalent semidefiniteprogramming (SDP), we propose an iterative alternating algo-rithm to compute the transceiver matrices jointly. Moreover, toreduce the high computational complexity of the SDP method,we develop a cutting-set method, which solves the problem byalternating between an optimization step (transceiver design) anda pessimization step (worst-case channel analysis). Numericalresults are presented to show the effectiveness and robustnessof the proposed algorithms.
Keywords—Cognitive radio, full-duplex, MIMO, MSE, multi-user, self-interference, robust transceiver designs.
I. INTRODUCTION
W ITH the dramatic increase in the demand for wirelesscommunication services, the efficient utilization of the
available spectrum resources becomes crucial, and motivatesthe realization of new solutions. In particular, a full-duplex(FD) transceiver is able to transmit and receive at the same timeand the same frequency, and hence has the potential to enhancethe spectral efficiency. As a result it is widely considered asa candidate technology for future communication systems [2].Nevertheless, FD systems suffer from the inherent interferencefrom their own transmit signal, i.e., self-interference (SI).In order to avoid the SI, the currently deployed wirelesscommunication systems operate in half-duplex (HD) mode byallocating orthogonal channels for transmission and reception.
A. C. Cirik was with the School of Engineering, Institute for Digi-tal Communications, University of Edinburgh, Edinburgh EH9 3JL, U.K.He is now with the Department of Electrical and Computer Engineering,University of British Columbia, Vancouver, BC, V6T 1Z4, Canada (email:[email protected]).
S. Biswas and T. Ratnarajah are with the School of Engineering, Institutefor Digital Communications, University of Edinburgh, Edinburgh EH9 3JL,U.K. (email: {sudip.biswas, t.ratnarajah}@ed.ac.uk).
O. Taghizadeh is with the Institute for Theoretical Information Tech-nology, RWTH Aachen University, Aachen, 52074, Germany (email:[email protected]).
This work was supported by the Seventh Framework Programme forResearch of the European Commission under grant number ADEL - 619647and the U.K. Engineering and Physical Sciences Research Council (EPSRC)under grant number EP/L025299/1.
Part of this work was presented in IEEE International Conference onCommunications (ICC), Kuala Lumpur, Malaysia, May 2016 [1].
Correspondent author: Sudip Biswas.
This is usually realized by separating the channels via the wellknown time division duplexing (TDD), or frequency divisionduplexing (FDD) schemes.
Recently, it has been experimentally demonstrated that theoverwhelming SI in an FD transceiver can be sufficiently mit-igated by simultaneously implementing cancellation schemesincluding antenna design, and analog and digital domain SIcancellation techniques [3]-[5]. However, consideration of aresidual SI is still necessary, due to the inherent imperfectionof the transmit and receive chains [6]-[13]. Moreover, theinterference from the uplink (UL) to downlink (DL) users, i.e.,the co-channel interference (CCI), is another challenge for thegainful use of FD technology. In this respect, the applicationof beamforming techniques are known to be effective, wherethe impact of the CCI, as well as the SI are jointly taken intoconsideration [14], [15].
Furthermore, cognitive radio (CR) is another promisingtechnology that can enhance spectrum efficiency [16], [17]. Inan underlay CR system, unlicensed secondary users (SUs) canaccess the spectrum owned by the licensed primary users (PUs)as long as the interference level from SUs to PUs is maintainedto meet the Quality-of-Service (QoS) requirements for thePUs. In practice, it is quite difficult to obtain the estimatesof the channels in CR systems due to the time varying andrandom nature of wireless channel, and the lack of full SU-PUcommunication. In this regard, there are two approaches whichare commonly used to model the channel state information(CSI) error. Firstly, the stochastic approach, where the channelis usually modeled as a complex random matrix with normallydistributed elements, and the transmitter knows the meanand/or the covariance, i.e., the slowly-varying channel statisticsthat can be well estimated [18]. Secondly, the deterministic(or worst-case) approach, where the instantaneous CSI erroris assumed to lie in a known set, e.g., a norm-2 ball, where alarger set represents a higher CSI uncertainty [19]-[23].
The authors in [12] studied the minimization of summean-squared-error (MSE) in a multiple-input multiple-output(MIMO) FD underlay CR system. By assuming perfect knowl-edge of the CSI, a second-order cone programming (SOCP)-based algorithm was proposed. However, the sum-MSE opti-mization problem under norm-bounded imperfect CSI cannotbe cast as an SOCP problem, and thus the algorithms proposedin [12] are not applicable under the assumption of imperfectCSI knowledge, since it is not suitable to solve the min-max problems arising from worst-case (norm-bounded) CSIconsidered in this paper. Hence, it is of paramount importanceto consider the imperfect channel estimates, and develop robustbeamforming schemes in FD underlay CR systems.
Motivated by the above, in this paper, we study an underlayCR system, where a secondary FD base-station (BS) servesmultiple HD UL and DL SUs at the same time and frequency,and the secondary network utilizes the spectrum simulta-neously with multiple PUs. In addition to SI, CCI is also

2
taken into account to design the optimal robust beamformersunder a norm-bounded-error model. We study the sum-MSEminimization problem under the power constraints at the ULSUs and secondary BS, and SUs’ interference constraints tothe PUs. Since this problem is semi-infinite (optimizationproblems with infinitely many constraints) [24, Ch. 3], wepropose two methods to design the transceiver matrices atthe secondary network jointly. In the first method, by repre-senting the semi-infinite constraints in tractable forms (linearmatrix inequality (LMI)), the problem can be transformed toa semidefinite programming (SDP), and therefore efficientlysolved by optimizing the transmit and receiving beamformingmatrices iteratively. Due to the prohibitive complexity of theSDP-based algorithms, in the second algorithm, we proposea low complexity cutting-set method [25], [26], which solvesthe problem by alternating between an optimization step and apessimization step. In the first (optimization) step, the transmitand receive beamforming matrices are designed under a givenfinite subset of the uncertainty region, and in the second (pes-simization) step, the subset is updated through the computationof the worst-case channels in the uncertainty regions.
A. Related WorksThe imperfect CSI in FD cellular systems have been con-
sidered in the beamformer design in [27], [28], [29], wherethe channel estimation errors are modeled using a statisticalapproach. Norm-bounded CSI model in FD systems was firstadopted in [30], [31]. However, only single-users equippedwith single antennas was considered. Therefore, they cannotbe applied to FD multi-user MIMO wireless communicationsystems directly.
In the context of robust CR networks design, a stochasticmodel was considered in [18] and the worst-case model wasconsidered in [19], [21], [22], [23]. For example, in [19], arobust cognitive beamforming scheme was proposed where thesecondary transmitters were assumed to have the the perfectCSI information between secondary transmitters and receivers,whereas the channel between the secondary transmitters andprimary users were assumed to be known imperfectly. More-over, in [19], the transmitters and receivers were assumed tobe equipped with multiple and single antennas, respectivelyleading to a convex optimization problem. In [21], the non-cooperative game was considered to optimize the CR networkwhere the resource allocation problem for each game playerwas convex. Compared with the optimization problems in [19],[21], which are convex, the robust beamforming problem wehave is more challenging because it is non-convex. Both ourproposed scheme and the scheme proposed in [22] employthe S-procedure [32] to transform the constraints into LMIs.The difference between our proposed scheme and the schemeproposed in [22] is that in our proposed scheme, the optimiza-tion problem is transformed to a single SDP while in [22], theoptimization problem is solved using bisection search wherein each iteration an SDP is solved. Moreover, single-antennareceivers are assumed in [22]. In [23], each semi-infinite con-straint included only one uncertainty variable, and they mostlyresort to the complex-valued version of the sign-definitenesslemma published in [32] to resolve the semi-infiniteness ofthe constraints. We apply the sign-definiteness lemma to thecase of complex-valued quantities with multiple uncertaintiesin each design constraint. Moreover, in [23], identical channelestimation errors for different secondary and primary linkswere assumed. Compared to [23], the proposed scheme in
our paper accounts for different estimation inaccuracies in thesecondary and primary links.
As discussed in [12], MSE-based beamforming problemshave been considered extensively for many communicationsystems in literature due to their good performance, signif-icantly reduced complexity, and relationship with bit errorrate (BER) and signal-to-interference-plus-noise ratio (SINR).Here, we reveal useful insights into FD CR systems via arobust MSE-based optimization. Indeed, the studied systemin our paper shares many similarities to the traditional multi-cell multi-user networks, both in terms of the system concept,service requirements, as well as the design guidelines. Never-theless the application of the FD technology in a CR networkintroduces fundamental new challenges to the traditional multi-user MIMO systems, which is the main focus of the presentpaper. The main distinctions are summarized as follows:• The coexistence requirements of a secondary cellular
system, with a network of PUs needs to be revised foran FD CR system. This is because, in an FD cellularnetwork, the BS, as well as the UL users share thesame channel resource for transmission, which resultsin the imposition of a higher interference intensity onthe primary network. This issue becomes more criticalconsidering the fact that the acquisition of an accurateCSI regarding the interference paths from the secondaryUL users to the primary nodes is relatively unrealistic,and calls for the consideration of joint robust transmis-sion strategies from the UL secondary users as well asthe secondary BS.
• In an FD multi-user MIMO system, the interferencepaths between UL and DL SUs should be additionallytaken into account. This impacts both the system perfor-mance, as well as the design strategy.
• In an FD multi-user MIMO system, the SI at thesecondary BS is a critical challenge, and strongly relatesthe performance/design of the UL reception to the DLtransmission. In this respect, the consideration of anaccurate transceiver model, including the impacts oftransmission and reception distortions are critical, as itis well-established in the context of FD system designand analysis.
Note that the aforementioned considerations regarding thedesign of a robust FD multi-user MIMO CR network, resultin a relatively complicated problem structure. Moreover, dueto the transmit and receive distortions at the FD nodes inaddition to imperfect CSI, MSE is a complicated function,which makes the transformation of the constraints in theoptimization problems complicated. This, in turn, calls for arigorous optimization and analysis, together with a dedicatedcomputational complexity study. Simulation results demon-strate that the proposed FD system can achieve a significantimprovement of throughput over HD system.
B. NotationMatrices and vectors are denoted as bold capital and low-
ercase letters, respectively. (·)T is the transpose; (·)∗ is theconjugate, and (·)H is the conjugate transpose. E {·} and tr{·}denote the statistical expectation and trace, respectively. INand 0N×M denote the N by N identity and the N by M zeromatrices, respectively. diag (A) is the diagonal matrix with thesame diagonal elements as A. CN
(µ, σ2
)denotes a complex
Gaussian distribution with mean µ and variance σ2. vec(·)stacks the elements of a matrix to one long column vector.

3
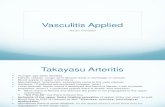
Fig. 1: An illustration of a full-duplex multi-user MIMO CR system model. The PUs are being interfered by both the SU BS and UL SUs.
The operators ⊗ and ⊥ denote Kronecker product and thestatistical independence, respectively. ‖X‖F and ‖x‖2 denotethe Frobenius norm of a matrix X and the Euclidean norm ofa vector x, respectively. bAici=1,...,K denotes a tall matrix (orvector) obtained by stacking the matrices Ai, i = 1, . . . ,K.<{A} represents the real part of A. A � 0 shows that A is apositive semidefinite matrix. Finally, Rm×n and Cm×n denotem× n real and complex matrices, respectively.
II. SYSTEM MODEL
We study an underlay FD CR cellular system, in which asecondary FD BS equipped with M0 transmit and N0 receiveantennas serves K HD mode UL SUs, each equipped with Mk
transmit antennas and J HD mode DL SUs, each equippedwith Nj receive antennas simultaneously. The secondary net-work coexists with the primary network, consisting of L PUsas seen in Fig. 1.
In Fig. 1, HULk ∈ CN0×Mk and HDL
j ∈ CNj×M0 denotethe k-th UL and the j-th DL channel, respectively. Moreover,H0 ∈ CN0×M0 and HDU
jk ∈ CNj×Mk denote the SI channelat the FD BS and the CCI channel between the k-th UL andj-th DL users, respectively.
We adopt the transmitter/receiver distortion model in [7],which accounts for the non-ideal hardware components atthe transmit and receive chains, e.g., power amplifiers, os-cillators, analog-to-digital converters (ADCs), and digital-to-analog converters (DACs). The aforementioned model relieson the experimental measurements in [33] and [34] showingthat a collective effects of hardware imperfections can beapproximated as an additive Gaussian noise, and this modelhas been commonly used in related literature, see [8]-[13].In this respect, we consider an additive white Gaussian termas “transmitter noise” (“receiver distortion”) at each transmit(receive) antenna, whose variance is κ (β) times the power ofthe undistorted signal at the corresponding chain.
The source symbols at the k-th UL and j-th DL users aredenoted as sULk ∈ CdUL
k ×1 and sDLj ∈ CdDLj ×1, respectively.
It is assumed that the symbols are independent and identicallydistributed (i.i.d.) with unit power, i.e., E
[sULk
(sULk
)H]=
IdULk
and E[sDLj
(sDLj
)H]= IdDL
j. The transmitted signal of
the k-th UL user and that of the BS can be written as
xULk = VULk sULk , x0 =
J∑j=1
VDLj sDLj , (1)
respectively, where VULk ∈ CMk×dUL
k and VDLj ∈ CM0×dDL
j
represent the precoders for the data streams of the k-th UL
and j-th DL users, respectively. The signal received by the BSand that received by the j-th DL user can be written as
y0 =
K∑k=1
HULk
(xULk + cULk
)+ H0 (x0 + c0)
+ e0 + n0, (2)
yDLj = HDLj (x0 + c0) +
K∑k=1
HDUjk
(xULk + cULk
)+ eDLj + nDLj , (3)
respectively, where n0 ∈ CN0 and nDLj ∈ CNj denote theadditive white Gaussian noise (AWGN) vector with zero meanand covariance matrix R0 = σ2
0IN0and RDL
j = σ2j INj
at theBS and the j-th DL user, respectively.1
Furthermore, cULk (c0) in (2)-(3), is the distortion at thetransmitter at the k-th UL user (BS), which closely approx-imates the effects of phase noise, non-linearities in the DACand additive power-amplifier noise. The covariance matrix ofcULk is given by κ (κ � 1) times the energy of the intendedsignal at each transmit antenna [7]. In particular cULk can bemodeled as
cULk ∼ CN(0, κ diag
(VULk
(VULk
)H)), cULk ⊥ xULk . (4)
Finally, in (3)((2)), eDLj (e0) is the receiver distortion at thej-th DL user (BS), which closely approximates the combinedeffects of non-linearities in the ADC, additive gain-controlnoise and phase noise. The covariance matrix of eDLj is givenby β (β � 1) times the energy of the undistorted receivedsignal at each receive antenna [7] and can be modeled as
eDLj ∼ CN(0, βdiag
(ΦDLj
)), eDLj ⊥ uDLj , (5)
where ΦDLj = Cov{uDLj } and uDLj is the undistorted received
vector at the j-th DL user, i.e., uDLj = yDLj −eDLj . Similarly,the discussion on the transmitter/receiver distortion modelholds for c0 and e0, as well.
To obtain the source symbols of the k-th UL and the j-th DL users, the received signals are multiplied by linear
1Since the secondary BS and DL SUs are unable to distinguish theinterference from the primary network from the thermal noise, the noise termsin (2) and (3) include both the thermal noise and the interference from thePUs. This assumption is also adopted in [19], [21], [35]-[37] and the noise ismodeled as zero mean with unit variance in [19], [38].

4
matrices, employing single-stream decoding2. In this regard,linear decoders are denoted as UUL
k ∈ CN0×dULk , and UDL
j
∈ CNj×dDLj at the BS and at the j-th DL user, respectively.
Consequently, the estimates of data streams are given as
sULk =(UULk
)Hy0, sDLj =
(UDLj
)HyDLj . (6)
Using these estimates, the MSEs of the k-th UL and j-th DLusers can be written as in (7) and (8) given at the bottom ofthe current page, respectively. In (7) and (8), ΣUL
k and ΣDLj
are the approximated aggregate interference-plus-noise termsat the k-th UL and j-th DL user, respectively, and are expressedas in (9)-(10) given at the bottom of the following page3 4.Since the secondary and primary networks coexist under thesame spectrum, secondary network infers interference on theprimary network. The interference power from the UL SUs andBS projected to the l-th PU equipped with Tl receive antennasis written as
IPUl =
K∑k=1
tr{
Glk
(VULk
(VULk
)H+κdiag
(VULk
(VULk
)H))GHlk
}+
J∑j=1
tr{
Gl
(VDLj
(VDLj
)H+κdiag
(VDLj
(VDLj
)H))GHl
}, (11)
2In this paper we consider a system with linear and single-stream decoding.Other decoding possibilities, e.g., successive interference reduction schemesbased on single user decoding, can be also considered at the expense of highercomplexity, see, e.g., [39], [40].
3Note that ΣULk and ΣDL
j are approximated under κ � 1 and β � 1,and thus the terms including κβ, i.e., the multiplication of κ and β have beenignored. This is a practical assumption [4], [7]. Note that although the termsκ and β are much smaller than 1, when they are applied on a strong channelalone, i.e., SI channel, they are no longer negligible [7].
4In practice, since the BS knows the codeword x0 (its own transmittedsignal), and the SI channel H0, the term H0x0 can be canceled out in (2).In the following sections, we will keep this term merely to be able to use thesimplification in the next subsection. However, in the performance simulations,this term will not be considered.
where Glk ∈ CTl×Mk(Gl ∈ CTl×M0
)is the channel between
the l-th PU and k-th UL user (l-th PU and the BS).
A. Joint Beamforming Design
In this paper, we tackle the sum-MSE minimization problem,which is formulated as
minV,U
K∑k=1
tr{
MSEULk
}+
J∑j=1
tr{
MSEDLj
}(12a)
s.t. tr{
VULk
(VULk
)H} ≤ Pk, k = 1, . . . ,K, (12b)J∑j=1
tr{
VDLj
(VDLj
)H} ≤ P0, (12c)
IPUl ≤ λl, l = 1, . . . , L, (12d)where Pk in (12b) is the transmit power constraint at thek-th UL user, P0 in (12c) is the total power constraintat the BS, and λl in (12d) is the upper limit of the in-terference allowed to be imposed on the l-th PU. HereV =
{VULk , k = 1, . . . ,K, VDL
j , j = 1, . . . , J}
and U ={UULk , k = 1, . . . ,K, UDL
j , j = 1, . . . , J}
are the set of alltransmit and receive beamforming matrices, respectively.
1) Simplification of Notations: To simplify the notations,we combine UL and DL channels, similar to [15]. Let usdenote SUL and SDL to represent the set of K UL and JDL channels, respectively. Denoting Hij , ni, Glj and receive(transmit) antenna numbers Ni(Mi) as
Hij =
HULj , i ∈ SUL, j ∈ SUL,
H0, i ∈ SUL, j ∈ SDL,HDUij , i ∈ SDL, j ∈ SUL,
HDLi , i ∈ SDL, j ∈ SDL,
ni =
{n0, i ∈ SUL,nDLi , i ∈ SDL,
Glj =
{Glj , j ∈ SUL,Gl, j ∈ SDL, Ni
(Mi
)=
{N0 (Mi) , i ∈ SUL,Ni (M0) , i ∈ SDL,
and referring to VXi , UX
i , dXi and ΣXi , X ∈ {UL,DL} as
Vi, Ui, di and Σi, respectively, the MSE of the i-th link,
MSEULk =
((UULk
)HHULk VUL
k − IdULk
)((UULk
)HHULk VUL
k − IdULk
)H+(UULk
)HΣULk UUL
k , (7)
MSEDLj =
((UDLj
)HHDLj VDL
j − IdDLj
)((UDLj
)HHDLj VDL
j − IdDLj
)H+(UDLj
)HΣDLj UDL
j . (8)
ΣULk ≈
K∑j 6=k
HULj VUL
j
(VULj
)H (HULj
)H+ κ
K∑j=1
HULj diag
(VULj
(VULj
)H) (HULj
)H+
J∑j=1
H0
(VDLj
(VDLj
)H+ κdiag
(VDLj
(VDLj
)H))HH
0 + σ20IN0
+ β
J∑j=1
diag(H0V
DLj
(VDLj
)HHH
0
)+ β
K∑j=1
diag(HULj VUL
j
(VULj
)H (HULj
)H), (9)
ΣDLj ≈
J∑i 6=j
HDLj VDL
i
(VDLi
)H (HDLj
)H+ κ
J∑i=1
HDLj diag
(VDLi
(VDLi
)H) (HDLj
)H+
K∑k=1
HDUjk
(VULk
(VULk
)H+ κdiag
(VULk
(VULk
)H)) (HDUjk
)H+ σ2
j INj
+ β
K∑k=1
diag(HDUjk VUL
k
(VULk
)H (HDUjk
)H)+ β
J∑i=1
diag(HDLj VDL
i
(VDLi
)H (HDLj
)H). (10)

5
i ∈ S , SUL ∪ SDL can be written asMSEi
=(UHi HiiVi − Idi
) (UHi HiiVi − Idi
)H+ UH
i ΣiUi,(13)whereΣi =
∑j∈S,j 6=i
HijVjVHj HH
ij + κ∑j∈S
Hijdiag(VjV
Hj
)HHij
+ β∑j∈S
diag(HijVjV
Hj HH
ij
)+ σ2
i INi, (14)
and the interference power at the l-th PU, IPUl in (11) can berewritten as
IPUl =∑j∈S
tr{Glj
(VjV
Hj + κdiag
(VjV
Hj
))GHlj
}.(15)
With the simplified notations, the non-convex optimizationproblem (12) can be equivalently expressed as
minV,U
∑i∈S
tr {MSEi} (16a)
s.t. tr{ViV
Hi
}≤ Pi, i ∈ SUL, (16b)∑
i∈SDL
tr{ViV
Hi
}≤ P0, (16c)
IPUl ≤ λl, l = 1, . . . , L, (16d)where (16d) represents the per PU received interference powerconstraint. Note that underlay CR systems enable SUs totransmit with overlapping spectrum with PUs as long asthe QoS of PUs is not degraded. This is managed by, e.g.,introducing some interference constraints that impose upperbounds on the total aggregate interference induced by all SUsto each PU. The choice of this upper bound (or threshold) is acomplex and open regulatory issue, which can be the resultof a negotiation or opportunistic-based procedure betweenPUs (or regulatory agencies) and SUs [35]. Both deterministicand probabilistic interference constraints have been suggestedin the literature [16], [17]. In this paper, we will considerdeterministic interference constraints as assumed in [35], [36],[37]. Particularly, we assume that the PU imposing the interfer-ence constraint, has already computed its maximum tolerableinterference threshold.
B. Imperfect CSI Model
In practice, perfect CSI of the PUs may not be availableat the BS, because of the loose cooperation between PUs andSUs. Therefore, in this paper, we assume that the secondaryBS has an imperfect knowledge of the secondary and primarynetworks. The channel uncertainties are modeled by the worst-case (norm-bounded error) model [19]-[20]:
Hij ∈ Hij ={
Hij + ∆i : ‖∆i‖F ≤ δi, j ∈ S},(17)
Glj ∈ Glj ={
Glj + Λl : ‖Λl‖F ≤ θl, j ∈ S}, (18)
where Hij and Glj denote the nominal value of the CSI, ∆i
and Λl denote the channel error matrix, and δi and θl denotethe uncertainty bounds.
Under channel uncertainties, the problem (16) can be ex-pressed as
minV,U
max∀Hij∈Hij
∑i∈S
tr {MSEi} (19a)
s.t. tr{ViV
Hi
}≤ Pi, i ∈ SUL, (19b)
TABLE I: Sum-MSE Minimization using SDP Algorithm
1) Set the iteration number n = 0 and initialize V[n].2) n← n+ 1. Update U
[n]i , i ∈ S by solving the convex SDP problem (21)
under fixed V[n−1].3) Update V
[n]i , i ∈ S by solving the convex SDP (21) under fixed U[n].
4) Repeat steps 2 and 3 until convergence.∑i∈SDL
tr{ViV
Hi
}≤ P0, (19c)
IPUl ≤ λl, ∀Glj ∈ Glj , l = 1, . . . , L.(19d)Due to the constraint (19d), the problem (19) is a semi-
infinite program [24, Ch. 3], and we will derive an equivalentconstraint in LMI form in Section III, so that the problem (19)will turn into an equivalent SDP, which can be efficientlysolved by standard interior point methods. Then, in an attemptto further reduce the complexity of the SDP algorithm, inSection IV, we will develop a cutting-set based algorithm tosolve the non-convex problem (19).
III. SDP METHOD
Since the problem (19) is an intractable semi-infinite op-timization problem [41], in the following, we will turn itinto a tractable form. Using epigraph form [42, Sec. 4.1.3]and introducing slack variables τi, the min-max problem (19)can be equivalently rewritten as the following minimizationproblem:
minV,U,τ
∑i∈S
τi (20a)
s.t. tr {MSEi} ≤ τi, ∀Hij ∈ Hij , i ∈ S, (20b)tr{ViV
Hi
}≤ Pi, i ∈ SUL, (20c)∑
i∈SDL
tr{ViV
Hi
}≤ P0, (20d)
IPUl ≤ λl, ∀Glj ∈ Glj , l = 1, . . . , L, (20e)where τ is a stacked vector composed of τi, i ∈ S.
The problem (20) can be formulated as a standard SDP,which is defined as minimizing a linear objective under LMIconstraints. LMI is a matrix constraint in the form of A (x) �0, where the matrix A depends linearly on x. Thanks to thisformulation, many well known algorithms for solving SDPs,e.g., interior point methods [42] can be exploited to solve theoptimization problem efficiently in polynomial time. The SDPformulation, equivalent to the problem (20) is expressed asbelow, the lengthy proof of which is relegated to Appendix A5.
minV,U,τ ,εi≥0,ηl≥0
∑i∈S
τi (21a)
s.t.
τi − εi µHi 01×NiMµi IAi
−δiD∆i
0NiM×1 −δiDH∆i
εiINiM
� 0, i ∈ S, (21b)
‖vec (Vi)‖22 ≤ Pi, i ∈ SUL, (21c)‖bvec (Vi)ci∈SDL‖22 ≤ P0, (21d) λl − ηl ιHl 01×TlM
ιl IBl−θlEΛl
0TlM×1 −θlEHΛl
ηlITlM
�0, l=1, . . . , L.(21e)
The variables Ai, Bl, µi, D∆i , ιl and EΛlare defined as:
5To simplify the presentation, from now on we will assume the number oftransmit antennas at the BS is equal to number of transmit antennas at the ULusers, i.e., M =M0 =Mi, i ∈ SUL.

6
Ai = di
∑j∈S
(dj + Mj
)+ Ni
+ Ni∑j∈S
dj , (22)
Bl = Tl∑j∈S
(dj + Mj
), (23)
µi=
(VTi ⊗UH
i
)vec
(Hii
)− vec (Idi)⌊(
VTj ⊗UH
i
)vec
(Hij
)⌋j∈S,j 6=i⌊⌊√
κ((Γ`Vj)
T ⊗UHi
)vec
(Hij
)⌋`∈D(T )
j
⌋j∈S⌊⌊√
β(VTj ⊗ (UH
i Γ`))vec
(Hij
)⌋`∈D(R)
i
⌋j∈S
σivec (Ui)
,(24)
D∆i=
(VTi ⊗UH
i
)⌊(VTj ⊗UH
i
)⌋j∈S,j 6=i⌊⌊√
κ((Γ`Vj)
T ⊗UHi
)⌋`∈D(T )
j
⌋j∈S⌊⌊√
β(VTj ⊗ (UH
i Γ`))⌋`∈D(R)
i
⌋j∈S
0diNi×NiM
, (25)
ιl =
⌊(
VTj ⊗ ITl
)vec
(Glj
)⌋j∈S
√κ
⌊⌊((Γ`Vj)
T ⊗ ITl
)vec
(Glj
)⌋`∈D(T )
j
⌋j∈S
,(26)
EΛl=
⌊(VTj ⊗ ITl
)⌋j∈S√
κ⌊⌊(
(Γ`Vj)T ⊗ ITl
)⌋`∈D(T )
j
⌋j∈S
. (27)
As it can be observed from (21b), the problem (21) doesnot hold a jointly convex structure over the optimizationvariables. Nevertheless, it is a separately convex optimizationproblem over the transmit beamforming matrices V, and thereceiving beamforming matrices U, once the other variablesare fixed. This facilitates an alternating optimization algorithmwhere in each iteration the solution to (21) is calculated, as aconvex optimization problem, assuming an alternatively fixedV or U. The described optimization iterations continue untilconvergence or a maximum number of iterations is reached.Please see Table I for a detailed algorithm description.
The proposed SDP method decreases the sum MSE mono-tonically at each iteration of the alternating algorithm. Andsince MSE is bounded below by zero, it is quite obviousthat the proposed sum-MSE minimization algorithm con-verges [43], [44]. However, the resulting converging point doesnot necessarily satisfy the first order optimality conditions andsince the sum-MSE minimization problem is not jointly convexover transmit and receive filters, the proposed algorithm doesnot necessarily converge to an optimum point of the originalproblem. As a result, it is important to select good initializationpoints to achieve a suboptimal solution with a good perfor-mance. Due to the problem complexity, the utilization of suchmethods with similar convergence result is very common [45].The performance of the proposed SDP-based algorithm isanalyzed via numerical simulations in Section VI.
A. Computational Complexity
In this subsection, we discuss the computational complexityof the proposed SDP algorithm in Table I. The number of
TABLE II: Complexity of SDP method
Number of variables (n) Dimension of blocks (ai)V
∑i∈S 2Mdi + 2|S|+ L ai = Ai + NiM + 1, i ∈ S
ai = MdULi + 1, i ∈ SUL
ai = M∑
i∈SDL dDLi + 1
al = Bl + TlM + 1, l, . . . , L
Ui 2Nidi + 2 ai = Ai + NiM + 1, i ∈ S
arithmetic operations required to solve a standard real-valuedSDP problem
minx∈Rn
cTx (28a)
s.t. A0 +∑n
i=1xiAi � 0, (28b)
‖x‖2 ≤ R, (28c)where Ai denotes the symmetric block-diagonal matrices withP diagonal blocks of size al × al, l = 1, . . . , P , is upper-bounded by [41]
O (1)
(1 +
P∑l=1
al
)1/2
n
(n2 + n
P∑l=1
a2l +
P∑l=1
a3l
). (29)
Since the proposed algorithm in Table I solves a SDP prob-lem in Step 2 and Step 3, the number of arithmetic operationsrequired to compute optimal Vi and Ui is calculated from (29)as follows. In computing Vi, the number of diagonal blocks Pis equal to |S|+
∣∣SUL∣∣+L+1. For the MSE constraint of eachuser, the dimension of blocks are ai = Ai+ NiM +1, i ∈ S.For the UL SU power constraint, the dimension of the blocksare ai = MdULi +1, i ∈ SUL. For the BS power constraint, thedimension of the block is ai = M
∑i∈SDL dDLi + 1, and for
the PU interference constraint, the dimension of the blocks areal = Bl + TlM + 1, l, . . . , L. The size of unknown variablesis n =
∑i∈S 2Mdi + 2|S| + L, where the first term is due
to the real and image parts of Vi and the other terms aredue to the additional slack variables. The calculation of thenumber of arithmetic operations required for Ui can be carriedout similarly. The computational complexity to solve the sum-MSE minimization problem using SDP method are given inTable II. It is easy to see that as the number of users andtransmit/receive antennas increase, the complexity of the SDPalgorithm is very high.B. CSI Acquisition
We assume that the secondary BS has the knowledge ofthe nominal channels and the radius of uncertainty regions.We undertake a centralized approach where the secondaryBS collects all channel matrices, computes the beamformingmatrices based on the imperfect CSI, and then distributesthem to the SUs. The estimation of CSI matrices in thesecondary network follows a similar strategy to that of tra-ditional systems, as the secondary nodes cooperate with thesecondary BS. This is performed via the exchange of thetraining sequences and feedback, and the application of usualCSI estimation methods [46]. On the other hand, it is morechallenging to obtain an accurate estimate for the CSI be-tween the secondary and primary networks, as the primarynetwork is usually not willing to cooperate with the secondarynetwork. In this regard, few methods have been suggestedto combat this problem. Firstly, in case the primary systemadopts the TDD scheme, the secondary network can obtainthe CSI to the primary nodes by taking advantage of thechannel reciprocity, and overhearing the transmissions fromthe primary network [46]-[50]. Secondly, a partial CSI can be

7
obtained via blind environmental learning [51], [52]. Third,an estimate of CSI can be obtained via the realization of aband manager with the ability to exchange the CSI betweenthe secondary and primary networks [47], [48], [53], andfinally, if possible, the primary and secondary networks cancooperate for the exchange of channel estimates [46]. Sincewe have loose cooperation between primary and secondarynetworks, the channel estimates will not be perfect in practice.Therefore, we model the imperfect channel estimates with anorm-bounded channel uncertainty model. Note that in SDP-based algorithm, the transmit and receive filters are designedat a central scheduler design with the help of CSI feedbacksat the secondary network [49].
IV. ROBUST TRANSCEIVER DESIGN BASED ONCUTTING-SET METHOD
Since the SDP algorithm has a high computational complex-ity, in this section, we propose an efficient with a low com-plexity algorithm, the cutting-set method [25], which tacklesthe channel uncertainties by separating worst-case optimizationfrom the robust transceiver design problem. In particular, theoptimization problem is solved through alternating betweentwo steps, i.e., transceiver design and worst-case channeldetermination steps. In the first step (transceiver design), theoptimal beamforming matrices are computed under the as-sumption that the errors belong to a certain known uncertaintyregion (fixed set of CSI), whereas the second step (worst-casechannel determination) computes the worst-case channel errormatrices in the uncertainty region that maximize the constraintsunder the assumption that transceiver beamforming matricescomputed in the first step are fixed. In the following, we giveboth steps of the cutting-set algorithm in detail to solve therobust MSE-based optimization problem.
A. Transceiver design under fixed channelsIn this step, a version of the semi-infinite problem is solved
over finite subsets of the uncertainty regions. Assuming thatthe worst-case channels are given (fixed CSI), the optimal Vi
and Ui are computed through solving the following problem:
minV,U,τ
∑i∈S
τi (30a)
s.t. ‖µi‖22 ≤ τi, i ∈ S, (30b)
‖vec (Vi)‖22 ≤ Pi, i ∈ SUL, (30c)‖bvec (Vi)ci∈SDL‖22 ≤ P0, (30d)
‖ιl‖22 ≤ λl, l = 1, . . . , L, (30e)where µi and ιl are defined in (54) and (55), respectively.Note that this problem is similar to the optimization prob-lem (56) (without CSI errors) given in Appendix A, and withstraightforward manipulations, it is easy to show that the SDPformulation without CSI errors would reduce to the SOCPformulation. Hence, we can reformulate the problem (30) as aSOCP problem under fixed V or fixed U [12].
B. Worst-case Channel Determination for Given TransceiversIn the second step, worst-case analysis is carried out where
channels that violate the constraints are determined and ap-pended to the finite uncertainty subsets. For fixed transceiverbeamforming matrices computed in the first step, the worst-case channels, which maximize the MSE and PU interferenceconstraints given in (30b) and (30e), respectively, are computedin the bounded uncertainty regions. Note that under fixed
transceiver beamforming matrices, the MSE and PU interfer-ence constraints are independent of each other with respect tothe CSI errors. Under a fixed transceiver design, the worst-casechannels that maximize the MSE of the i-th user is computedthrough solving the following problem
max∆i
tr {MSEi} (31a)
s.t. ‖∆i‖F ≤ δi, (31b)where ∆i is the channel estimation error defined in (17).
Since the function (31a) is non-convex, the problem isintractable, and thus to simplify the computation, we adopta first order approximation by neglecting all the second andhigher terms of CSI errors in (13), similar to [54], [55]. Theapproximation is expressed as
tr {MSEi}(a)≈ tr
{˜MSEi
}+ 2<
{vecH
(BHi
)vec (∆i)
},(32)
where tr{
˜MSEi
}is obtained by setting all CSI errors in (13)
to zero, (a) is obtained by using the identity tr {AB} =vecH
(AH
)vec (B), and Bi is expressed as
Bi = Vi
(UHi HiiVi − Idi
)HUHi +
∑j∈S,j 6=i
VjVHj HH
ijUiUHi
+ κ∑j∈S
diag(VjV
Hj
)HHijUiU
Hi
+ β∑j∈S
VjVHj HH
ijdiag(UiU
Hi
). (33)
Using Cauchy-Schwarz inequality in the approximate MSEexpression in (32), the worst-case CSI errors correspondingto the MSE constraints are computed as
∆i =δi
‖vec (Bi)‖2BHi . (34)
After computing the worst-case CSI errors, their correspond-ing worst-case channels are written as Hij = Hij+∆i, j ∈ S.Note that since the worst-case CSI error in (34) is computedthrough an approximation in (32), it is possible for the MSEconstraints in (30b) to be violated even if the correspondingworst-case channels are in the given uncertainty regions. How-ever, when the CSI error is small, this violation is negligible,since the contribution of the second and higher order terms ofCSI errors on the performance is also negligible [54], [55].
Next, we compute the worst-case CSI errors correspond-ing to the PU interference (20e). In particular, under fixedtransceiver design, the worst-case channels that maximize theinterference power at the l-th PU is computed by solving thefollowing problem
maxΛl
IPUl (35a)
s.t. ‖Λl‖F ≤ θl, (35b)which is, again, difficult to solve. Here, Λl is the channel esti-mation error defined in (18). Similar to (32), an approximationfor (15) involving only the first-order errors is adopted, and theapproximation is expressed as
IPUl ≈ IPUl + 2<{vecH
(CHl
)vec (Λl)
}, (36)
where IPUl is obtained by setting all CSI errors in (15) to zero,and Cl is defined as
Cl =∑j∈S
(VjV
Hj + κdiag
(VjV
Hj
))GHlj . (37)

8
Using Cauchy-Schwarz inequality in the approximate expres-sion (36), the worst-case errors corresponding to the l-th PUinterference are obtained as
Λl =θl
‖vec (Cl)‖2CHl . (38)
The corresponding worst-case channels can be expressed asGlj = Glj + Λl, j ∈ S.
C. Iterative Algorithm for the Robust Design
The proposed cutting-set algorithm to solve the robust MSE-based problem involves a two-step algorithm alternating overtransceiver optimization and worst-case analysis steps, whereat each step a convex optimization problem is solved asdescribed in the previous two subsections. The algorithm startswith the set of channel matrices H, which initially containsonly the imperfect CSI Hij , {i, j} ∈ S and Glj , j ∈ S, l =1, . . . , L. In the first step, the problem (30) is solved underall the channels in H (the constraints involve all the channelelements in the set H).
The second step involves computing the worst-case channelsthrough the problems (31) and (35) under the transceiversobtained in the previous step. After the worst-case analysis,if the corresponding channels for all links, i.e., Hij + ∆i
and Glj + Λl violate the constraints in (30b) and/or (30e)under the transceivers obtained in the first step, these worst-channels are appended to the set H. The alternating two-step algorithm runs until no violating channel is produced,i.e., the maximum constraint violation is below a specifiedthreshold [54], [55], [56], [57]. Note that during the worst-case channel determination step, the set H may be expanded(or remain the same) depending on the constraint violations.During the minimization step (first step), the precoder andreceive beamforming matrices are computed to meet MSE andPU interference constraints for increasing number of worst-case channels in H (MSE and PU interference constraintsmust include all the channels in H) resulting in increasedrobustness. Particularly, as the size of the set H increases,the number of effective constraints in the transceiver designproblem increases.
As shown in [25], the two-step alternating algorithm con-verges to an optimal solution of the original problem whenthe optimization and worst-case analysis steps are solved toglobal optimality in each iteration. However, the optimizationstep here involves solving the non-convex problem in (30) andfurthermore due to the MSE and interference approximationsin (32) and (36), respectively used to convexify the optimiza-tion problem in the worst-case analysis, the proposed iterativealgorithm is not guaranteed to lead to the robust optimalsolution, and generally converges to a suboptimal solution.Since the optimization problem is intractable, the convergenceof the proposed cutting-set algorithm is not shown analyticallybut only demonstrated empirically, similar to the prior relatedworks [54], [55], [56], [57] . However, our simulations showthat the proposed design is robust to the CSI errors, i.e., it canstill provide a significant gain over the non-robust method inthe presence of CSI errors. Moreover, using warm-start [25]techniques in the outer iterations, i.e., use the previouslycomputed precoder and receive filter to initialize the solutionof the current outer iteration reduces the overall effort forour proposed scheme to converge. The steps of the proposedcutting-set method is shown in Table III.
TABLE III: Sum-MSE Minimization using Cutting-Set Method
1) Set the iteration number n = 0 and initialize H[n].2) Update U
[n]i and V
[n]i by solving the problem (30) with the given set H[n]
utilizing a similar iterative algorithm given in Table I.3) Compute the worst-case channels, denoted as H[n] using (34) and (38).4) Find the violating channels and append them to the set,
i.e., H[n+1] ={H[n],H[n]
}.
5) If the termination criterion is satisfied, then end.Otherwise, set n← n+ 1 and go to Step 2.
TABLE IV: Complexity of cutting-set method
Number of variables (n) Dimension of blocks (ai)V
∑i∈S 2Mdi + |S| ai = Ai − Nidi, i ∈ S
ai = MdULi , i ∈ SUL
ai = M∑
i∈SDL dDLi
al = Bl, l, . . . , L
Ui 2Nidi + 1 ai = Ai, i ∈ S
D. Computational ComplexityThe main computation complexity of the cutting-set algo-
rithm stems from the SOCP problem (30), since the compu-tation complexity of the worst-case analysis can be neglected.A real-valued SOCP problem can be expressed as
minx∈Rn
cTx (39a)
s.t. ‖Aix + bi‖ ≤ cTi x + di, i = 1, . . . , P, (39b)‖x‖2 ≤ R, (39c)
where bi ∈ Rai . As discussed in [41], the upper bound on thenumber of arithmetic operations to solve this problem is:
O (1) (1 + P )1/2
n
(n2 + P +
P∑i=0
a2i
). (40)
In our problem, the number of inequalities P + 1 equals to|S| +
∣∣SUL∣∣ + L + 1. For the MSE constraint of each user,the dimension of blocks are ai = Ai − Nidi, i ∈ S . Forthe UL SU power constraint, the dimension of the blocks areai = MdULi , i ∈ SUL. For the BS power constraint, thedimension of the block is ai = M
∑i∈SDL dDLi , and for the
PU interference constraint, the dimension of the blocks areal = Bl, l, . . . , L. The size of the unknown variables aren =
∑i∈S 2Mdi + |S|. By carrying out a similar analysis,
the complexity of other subproblems can be computed. Thecomputational complexity for the sum-MSE problem based oncutting-set method is shown in Table IV. Note that comparedto the complexity of the SDP method in Table II, the cutting-set method has a lower computational complexity, which willbe further compared in the simulations.
V. EXTENSIONS
A. Different Utility FunctionsIn this subsection, it is shown that with minor modifications,
the proposed algorithms can also be applied to solve the otherrobust optimization problems. One problem can be sum-powerminimization subject to MSE and interference constraints,which can be formulated as:
minV,U
∑i∈S
tr{ViV
Hi
}(41a)
s.t. tr {MSEi} ≤ ςi, i ∈ S, ∀Hij ∈ Hij , (41b)IPUl ≤ λl, ∀Glj ∈ Glj , l = 1, . . . , L, (41c)
where ςi, i ∈ S is the MSE constraint of the i-th user. Usingepigraph form and introducing slack variables τi, the problem

9
can be written asmin
V,U,τ
∑i∈S
τi (42a)
s.t. tr{ViV
Hi
}≤ τi, i ∈ S, (42b)
tr {MSEi} ≤ ςi, i ∈ S, ∀Hij ∈ Hij , (42c)IPUl ≤ λl, ∀Glj ∈ Glj , l = 1, . . . , L. (42d)
Another optimization problem can be the minimization ofmaximum per-user MSE subject to power constraints at thesecondary network, and interference constraints from the sec-ondary to primary network. Unlike the sum-MSE minimizationproblem, the min-max per-user MSE problem makes sure thateach user has the same MSE, an thus the problem bringsfairness among the nodes. The min-max MSE problem iswritten as:
minV,U
max∀Hij∈Hij ,i∈S
tr {MSEi} (43a)
s.t. tr{ViV
Hi
}≤ Pi, i ∈ SUL, (43b)∑
i∈SDL
tr{ViV
Hi
}≤ P0, (43c)
IPUl ≤ λl, ∀Glj ∈ Glj , ∀l, (43d)which is equivalent to the following problem
minV,U,τ
τ (44a)
s.t. tr {MSEi} ≤ τ, ∀Hij ∈ Hij , i ∈ S, (44b)tr{ViV
Hi
}≤ Pi, i ∈ SUL, (44c)∑
i∈SDL
tr{ViV
Hi
}≤ P0, (44d)
IPUl ≤ λl, ∀Glj ∈ Glj , l = 1, . . . , L. (44e)
Since the problems (42) and (44) have similar structureswith (20), both problems (42) and (44) can be solved usingboth SDP and cutting-set methods proposed in Section III andSection IV, respectively.B. Multiple Uncertainties
So far, we have assumed that each semi-infinite constraint(MSE and interference constraints) includes only one uncer-tainty variable. Here, we will generalize this to the case ofcomplex-valued quantities with multiple uncertainties in eachdesign constraint. To that end, the channel is modeled as
Hij ∈ Hij ={
Hij + ∆ij : ‖∆ij‖F ≤ δij}, (45)
Glj ∈ Glj ={
Glj + Λlj : ‖Λlj‖F ≤ θlj}, (46)
where Hij , Glj are defined in (17)-(18), and δij , λlj denotethe nominal value of uncertainty bounds. Please note that com-pared to the model in (17)-(18), which has only one uncertaintyvariable, the model in (45)-(46) has multiple uncertainties.
To handle the multiple uncertainties, we first rewrite theMSE term in (13) as
µi =
(VTj ⊗UH
i
)vec (Hij)⌊√
κ((Γ`Vj)
T ⊗UHi
)vec (Hij)
⌋`∈D(T )
j⌊√β(VTj ⊗ (UH
i Γ`))vec (Hij)
⌋`∈D(R)
i
j∈S
σivec (Ui)
−
0(∑
j<i(Nj+Mj+1)didj)×1
vec (Idi)0(di(Ni−dj)+
∑j≥i(Nj+Mj+1)didj)×1
(47)
= µi +∑j∈S
Mij vec (∆ij) , (48)
where µi is the same as the first term in (47), and the onlydifference is that the actual channel matrices Hij , ∀{i, j} isreplaced with the nominal channel matrices Hij , and Mij isdefined as
Mij =
0(∑
j<i(Nj+Mj+1)didj)×NiMj(VTj ⊗UH
i
)⌊√κ((Γ`Vj)
T ⊗UHi
)⌋`∈D(T )
j⌊√β(VTj ⊗ (UH
i Γ`))⌋`∈D(R)
i
0(Nidi+∑
j>i(Nj+Mj+1)didj)×NiMj
. (49)
Using the extended sign-definiteness lemma [44], the MSEconstraint ‖µi‖
22 ≤ τi in (56b) can be expressed as
Ai −∑j∈S εijQ
HijQij −δi1PH
i1 . . . −δi|S|PHi|S|
δi1Pi1 εi1INiM. . . 0NiM×NiM
......
. . ....
−δi|S|Pi|S| 0NiM×NiM. . . εi|S|INiM
� 0, i ∈ S, (50)
εij ≥ 0, ∀{i, j}, (51)where
Ai =
[τi µHiµi IAi
], Qij = [−1, 01×Ai
] ,
Pij =[0NiM×1, MH
ij
],
and εij , ∀{i, j} are non-negative real numbers. The same stepscan be independently carried out for the interference powerconstraint ‖ιl‖22 ≤ λl in (56e). With the LMI forms in hand,the proposed SDP can be applied for the case with the multipleuncertainties.
VI. SIMULATION RESULTS
In this section, we numerically investigate the sum-MSEminimization problem for an FD MIMO CR cellular system.We start by comparing the sum MSE performance of the twoalgorithms, proposed in the paper as a function of transmit-ter/receiver distortion, κ/β and channel uncertainty size, δ/θ.We then analyze the sum-rate performance of the FD systemas a function of the number of antennas N , transmitter/receiverdistortion, κ/β, channel uncertainty size, δ/θ and CCI atten-uation factor6, ν. The tolerance (the difference between MSEof two iterations) of the proposed iterative algorithm is set to10−4, the maximum number of iterations is set to 50, and theresults are averaged over 100 independent channel realizations.Since the optimization problems we are dealing with are non-convex, we need to choose good initialization points to have asuboptimal solution with a good performance. In this paper,we use right singular matrices initialization [58], and haveused multiple initializations to improve the performance. Foreach simulation point, a certain number of initializations weretried and the best result was chosen. We have observed in
6It is important to note that while the channel matrices are assumed tobe given for each user, it is essential for a practical system to exploit asmart channel assignment algorithm prior to precoder/decoder design. This isparticularly essential for an FD setup as the CCI can be reduced by assigningthe users with weaker interference paths into the same channel. In order toincorporate the effect of channel assignment into our simulation, we assumean attenuation coefficient, namely ν, on the CCI channels, which representthe degree of isolation among UL and DL users due to channel assignment.

10
TABLE V: Simulation Parameters
Parameter SettingsCell Radius 40mCarrier Frequency 2GHzBandwidth 10MHzThermal Noise Density −174dBm/HzNoise Figure BS: 13dB, User: 9dBPath Loss (dB) between BS and users 103.8 + 20.9 log10 d(d in km)Path Loss (dB) between users (d in km) 145.4 + 37.5 log10 dShadowing Standard Deviation LOS: 3dB, NLOS: 4dB
5 10 15 20
Iteration Number
6
6.5
7
7.5
8
8.5
9
Su
m M
SE
FD SDP
FD Cutting set
Fig. 2: Convergence behavior of the proposed algorithms.
our simulations that the difference caused by the number ofinitializations is not very large after 20 initializations. Thus, inthe sequel, we have used 20 initializations.
We consider small cell deployments [59] and compare theFD system with the HD system under the 3rd GenerationPartnership Project (3GPP) Long-Term Evolution (LTE) speci-fications. Small cell is considered to be suitable for deploymentof FD technology due to its low transmit power, short trans-mission distances and low mobility [14], [60]. We consider asingle hexagonal cell with cell radius r = 40m, consisting ofa BS in the center with M0 transmit and N0 receive antennas.K = 2 UL and J = 2 DL users equipped with N antennasrandomly distributed in the cell7. For simplicity, we assumeM0 = N0 = N = N . The CR system has L = 2 PUs, withthe same maximum allowed interfering power λl = 0dB. Thechannel between BS and all users are assumed to experiencethe path loss model for line-of-sight (LOS), and the channelbetween UL and DL users are assumed to experience thepath loss model for non-line-of-sight (NLOS) communications.Detailed simulation parameters are shown in Table V.
The estimated channel gain between the BS to kth ULuser is given by HUL
k =√κULk HUL
k , where HULk denotes
the small scale fading following a complex Gaussian dis-tribution with zero mean and unit variance, and κULk =10(−X/10), X ∈ {LOS,NLOS} represents the large scalefading consisting of path loss and shadowing, where LOSand NLOS are calculated from a specific path loss modelgiven in Table V. The channels between BS and DL users,between UL users and DL users, between BS and PUs, andbetween UL users and PUs are defined similarly. We adopt theRician model in [3], in which the SI channel is distributed asH0 ∼ CN
(√KR
1+KRH0,
11+KR
IN0⊗ IM0
), where KR is the
7Although the BS has N0 +M0 antennas in total, we assume that onlyM0 (N0) antennas can be used for transmission (reception) in HD mode. Thisassumption is similar to [15]. The reason is that in practical systems RF front-ends are scarce resources, since they are much more expensive than antennas.Therefore, we assume that BS only has M0 transmission front-ends and N0
receiving front-ends, and do not carry out antenna partitioning.
0 5 10 15 20
Antenna number
106
108
1010
1012
1014
1016
Num
ber
of com
ple
x m
ultip
lications
FD SDP
FD Cutting set
(a) Complexity comparison.
4 8 12 16 20 24 28
Antenna number
0
2000
4000
6000
8000
10000
12000
CP
U tim
e (
sec)
0
2
4
6
8
10
12
14
16
Itera
tion n
um
ber
FD SDP
FD Cutting set
FD SDP
FD Cutting set
(b) CPU time and iteration number comparisons.
Fig. 3: Complexity, CPU time and iteration number comparisons of SDP and cutting-setalgorithm systems with respect to different number of antennas. In (a), 3 UL, 3 DL, 2PU equipped with 3 antennas, and d = 2 data stream transmission is assumed.
Rician factor, and H0 is a deterministic matrix8. Unless statedotherwise, we consider, N = 2, κ = β = −70dB, ν = 0.5and δ = θ = 0.1.
Fig. 2 shows the evolution of the proposed algorithms, i.e.,the convergence of the algorithms in Table I and Table III.The monotonic decrease of the sum-MSE can be verified, andis seen that the cutting set algorithm converges more rapidlythan SDP.
After establishing the convergence of the two algorithms, wenow present a thorough comparison of the SDP and cutting-set methods in terms of computational complexity (complexmultiplications) and CPU time (time in secs required forconvergence)/iteration number (number of iterations requiredto converge) in Fig. 3a and Fig. 3b, respectively with respect todifferent number of antennas. Similarly, in Fig. 4a and Fig. 4b,computational complexity and CPU time/iteration number areplotted with respect to different number of users for the twoalgorithms, respectively.9 Note that in Fig. 3b and Fig. 4b,the bar plots represent the CPU time and lines represent thenumber of iterations. As expected, cutting-set algorithm alwayshas the lowest complexity and requires less computational timethan SDP, especially at high number of antennas and users,which is inline with our computational complexity analysis inTable II and IV.
Next, we compare the sum-MSE performance of the pro-posed SDP and cutting set algorithms under various κ = β
8Similar to [14], without loss of generality, we set KR = 1 and H0 to bethe matrix of all ones for all experiments.
9For system guidelines we note that, the proposed algorithms are evaluatedcentrally using MATLAB R20015a on a Linux server with Intel Xeonprocessor (16 cores, each clocked at 2 GHz) and 31.4 GiB of memory.

11
0 5 10 15 20 25 30
Total number of users
106
108
1010
1012
1014
1016
1018
Num
ber
of com
ple
x m
ultip
lications
FD SDP
FD Cutting set
(a) Complexity comparison.
5 10 15 20
Total number of users
0
0.5
1
1.5
2
CP
U tim
e (
sec)
104
0
2
4
6
8
10
12
14
16
Itera
tion n
um
ber
FD SDP
FD Cutting set
FD SDP
FD Cutting set
(b) CPU time and iteration number comparisons.
Fig. 4: Complexity, CPU time and iteration number comparisons of SDP and cutting-setalgorithm systems with respect to different number of users. In (a), 4 transmit/receiveantennas, 2 PU equipped with 3 antennas, and d = 2 data stream transmission isassumed.
−90−80−70−60−50−40−306.4
6.6
6.8
7
7.2
7.4
Transmitter/Receiver Distortion (κ=β) [dB]
Su
m M
SE
FD SDP
FD Cutting set
Fig. 5: Sum-MSE comparison of SDP and cutting-set algorithms for an FD system withrespect to transmitter/receiver distortion, i.e., κ, β.
values in Fig. 5. From the figure, it can be seen that theperformance of the cutting set method is similar to the SDPbased one, but with a nominal performance gap. This loss inperformance is well compensated from the computational pointof view as the cutting set based method provides affordablecomputational complexity with respect to its SDP counterpart.To further highlight the similarities between the two algorithmsin terms of MSE performance, in Fig. 6, we compare the sum-MSE performance of both SDP and cutting set algorithmsunder different channel uncertainty sizes. When the channeluncertainty size is small, both the algorithms perform similarly,whereas with an increase in δ = θ values, the performancegap between the two algorithm increases. The reason is thatcutting-set algorithm is derived based on the approximationsgiven in (32) and (36), where the second-order CSI errorsare ignored. Therefore, as the channel uncertainty size in-
0 0.05 0.1 0.15 0.2 0.25 0.36.6
6.7
6.8
6.9
7
7.1
7.2
7.3
7.4
δ=θ Values
Su
m M
SE
FD SDP
FD Cutting set
Non−robust FD
Fig. 6: Sum-MSE comparison of SDP, cutting-set and non-robust algorithms for an FDsystem with respect to channel uncertainty, δ = θ. Here, κ = β = −40dB.
creases, the effect of second-order CSI errors become moreapparent [55]. In Fig. 6, we also illustrate the performanceof the non-robust algorithm. The non-robust beamformer isdesigned based on the nominal estimated value of the CSIby setting the radius of the uncertainty region to zero. It isshown that the performance of the non-robust design whichassumes the estimated CSI as perfect is found to deteriorateas the uncertainty region increases.
Hence, from the above results, we can conclude that theSDP algorithm achieves lower MSE, but with the cost of slowconvergence and high CPU time, which is inline with ourcomputational complexity analysis in Table II and IV. On theother hand, the cutting set method can be considered as a goodalternative to the SDP method, which offers a decent trade-offbetween performance and computational complexity.
In our next example, we give the sum-rate comparison ofFD and HD systems as a function of κ = β values fordifferent number of antennas based on the SDP algorithm. Wewould like to note that hereinafter, we have not included thecutting-set algorithm, since we have observed that both SDPand cutting-set algorithms give very similar performance. Thesum-rate of the MIMO FD cellular system assuming a linearsingle-stream decoding at the receiver can be expressed as
Isum =∑
i∈S
∑di
k=1log2 (1 + SINRik) , (52)
where SINRik is SINR of the k-th stream of user i defined as
SINRik =uHikHiivikvHikHH
ii uik
uHik
(Σi +
∑j 6=k Hiivijv
Hij
HHii
)uik
. (53)
In (53), uik and vik are the k-th column of Ui, and Vi,respectively. It is seen in Fig. 7 that the performance of theHD system is invariant to transmit/receive distortion κ andβ values, as expected and as the SI cancellation capabilityincreases, the sum-rate achieved by the FD system is around1.6 times more than that of HD. However, at low SI cancella-tion levels (below around κ = β = −55dB), the distortion ismagnified with the increasing number of antennas and the sum-rate of the FD system starts being outperformed by that of HDscheme. Note that transmitter/receiver distortion parametersκ = β = −55dB refers to digital domain SI cancellation.As mentioned in the fourth footnote, the main SI term hasbeen cancelled out in the analog domain, and the residual SIis handled in the digital domain. Similar digital cancellationvalues have also been reported experimentally in [4].
In Fig. 8, the importance of the smart channel assignment,as a stage prior to the precoder/decoder design is depictedfor the SDP algorithm. The CCI attenuation represents the

12
−90−80−70−60−50−40−300
5
10
15
20
25
30
35
Transmitter/Receiver Distortion (κ=β) [dB]
Su
m R
ate
(b
its/s
/Hz)
FD, N = 4
HD, N = 4
FD, N = 3
HD, N = 3
FD, N = 2
HD, N = 2
Fig. 7: Sum-rate comparison of FD and HD systems for various antenna numbers underdifferent transmitter/receiver distortion, i.e., κ, β.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
CCI Attenuation (ν)
0
2
4
6
8
10
12
14
16
18
20
Su
m R
ate
(b
its/s
ec/H
z)
FD, κ = −90 dB
HD, κ = −90 dB
FD, κ = −70 dB
HD, κ = −70 dB
FD, κ = −50 dB
HD, κ = −50 dB
0.1 0.14 0.18
7.67.8
88.28.48.68.8
Fig. 8: Sum-rate comparison of FD and HD systems with respect to CCI attenuationfactor, i.e., ν.
0 0.05 0.1 0.15 0.2 0.25 0.3
δ=θ Values
2
4
6
8
10
12
14
16
Su
m R
ate
(b
its/s
ec/H
z)
FD, κ = −90 dB
HD, κ = −90 dB
FD, κ = −70 dB
HD, κ = −70 dB
FD, κ = −50 dB
HD, κ = −50 dB
0.2 0.22 0.24
6
6.5
7
Fig. 9: Sum-rate comparison of FD and HD systems with respect to channel uncertainty,δ = θ.
provided isolation among the UL and DL users. It is seen thatas the suppression level of CCI increases (ν decreases), the FDsystem starts outperforming the HD system, and thus isolationamong the UL and DL users is essential for a successfulcoexistence of UL and DL users in an FD setup.
In Fig. 9, sum-rate comparison of FD and HD systemsunder various κ=β values as a function of δ=θ based on theSDP algorithm is shown. It can be seen that the FD resultsdeteriorate more than the HD ones for the same decrease CSIquality. The reason is that when operating in FD mode, thereare more channel links between the various nodes than forthe corresponding HD systems. Having an increased amountof links with imperfect knowledge result in a sharper ratedecrease, thereby stressing the added importance of channelestimation and robust beamformer design for FD systems.
Finally, in Fig. 10 we compare the sum-rate performanceof the FD system with respect to path loss. As mentionedpreviously, the path loss considered in this work is adopted
X1,j
X2,j
X3,j
X4,j
X5,j
Coordinate positions of UL users
0
2
4
6
8
10
12
Sum
Rate
(bits/s
/Hz)
FD
HD UL
HD DL
Fig. 10: Sum-rate comparison of FD and HD systems for various coordinate positions ofthe UL users. The x-axis represents the coordinate positions of the UL users, i.e., Xi,j ,with j ∈ {1, 2} and i = [1, 2, 3, 4, 5]. Here, ||X1,j ||2 < · · · < ||X5,j ||2.
from the 3GPP model [59], where it depends on the distance dbetween the BS and users. Here, d is in meters and is a randomvariable. In particular, we begin by randomly generating thecoordinate positions of the UL and DL users inside thecircumference of the cell, while the BS is located at the centreof the cell with coordinates (0, 0). The first coordinates forthe UL users, Xi,j = (xi,j , yi,j) is generated such that thedistance from the BS, di,j = ||Xi,j ||2 ≤ 10m. Now, withoutaltering the coordinates of the DL users, we start displacingthe coordinates of the UL users with respect to the BS insteps of 5m until it reaches the cell edge. It can be seenthat when the distance of the UL users increases, the sum-rate of the FD system monotonically decreases to reach anoptimal point at coordinate position X4,j before increasingagain at coordinate position X5,j . This can be explained asfollows. When the distance of the UL users from the BSincreases, the path loss increases, resulting in a decrease ofthe received signal power at the BS. As a result the residualSI power at the BS overwhelms the received signal power.Furthermore, as seen from Fig. 8, in FD systems the CCIis another important factor that affects FD systems. Whiledisplacing the coordinates of the UL users away from theBS, UL users may tend get closer to the DL users, whichis when the CCI overwhelms the DL users. As a result, thesum-rate of the FD system falls alarmingly below the sum-rate of the HD system. Here, coordinates X3,j and X4,j arethe two worst case scenarios. However, as the UL users moveeven farther, the CCI on the DL users starts decreasing andthe sum-rate of the FD system increases again. At coordinateX5,j , the UL of the FD system is almost inoperable andthe system is operating only in DL mode. Here, the pathloss affecting the UL transmission is so high that the signalpower can no longer be differentiated from the residual SIpower at the BS. Numerically, average of X5,j is found asX5,1=(26.3764, 23.9888) and X5,2=(26.7644,−28.9238). Atthis point the sum-rate of the FD system is comparable to thatof the DL of the HD system. Further, it can also be seen fromthe figure that the UL sum-rate of the HD system decreasesmonotonically. This is due to the fact that as the distancebetween the UL users and the BS increases, the path lossincreases, which in turn decreases the signal power resultingin reduction of the sum rate in the UL of the HD. However, asthe coordinates of the DL users are not altered, the sum-ratefor the DL users in HD mode are not affected and remainsconstant, which can be seen from the figure as well.

13
VII. CONCLUSION
We have tackled the sum-MSE minimization problem foran FD MIMO CR cellular system that suffers from the trans-mit/receive distortions and the imperfect CSI. Two algorithmsare proposed to solve this non-convex problem, i) an iterativeSDP-based algorithm that computes the transmit and receivingfilters jointly, ii) a two-step cutting-set method that alternatesbetween transceiver design and worst-case channel analysis. Assimulation results demonstrate, the cutting-set method achievesa similar performance to that of the SDP-based method with alower computational complexity. Moreover, it has been shownin simulations that replacing standard HD networks with FDones within this context can indeed increase achievable sumrate for low to intermediate distortion levels.
APPENDIX A: PROBLEM REFORMULATION
To solve the optimization problem (20), we first write it ina more compact form for ease of exposition. To that end, wewrite tr{MSEi} and IPUl in (20) in vector forms. As shownin Appendix B, the vector forms of tr{MSEi} and IPUl canbe written as tr{MSEi} = ‖µi‖
22 and IPUl = ‖ιl‖22, where
µi and ιl are given as
µi=
(VTi ⊗UH
i
)vec (Hii)− vec (Idi)⌊(
VTj ⊗UH
i
)vec (Hij)
⌋j∈S,j 6=i⌊⌊√
κ((Γ`Vj)
T ⊗UHi
)vec (Hij)
⌋`∈D(T )
j
⌋j∈S⌊⌊√
β(VTj ⊗ (UH
i Γ`))vec (Hij)
⌋`∈D(R)
i
⌋j∈S
σivec (Ui)
(54)
ιl =
⌊(VTj ⊗ ITl
)vec (Glj)
⌋j∈S√
κ⌊⌊(
(Γ`Vj)T ⊗ ITl
)vec (Glj)
⌋`∈D(T )
j
⌋j∈S
, (55)
where D(R)j represents the set {1 · · · Nj}, D(T )
j represents theset {1 · · · Mj} and Γ` is a square matrix with zero elements,except for the `-th diagonal element, equal to 1. Using thevector forms (54) and (55), the problem (20) can be rewrittenas
minV,U,τ
∑i∈S
τi (56a)
s.t. ‖µi‖22 ≤ τi, ‖∆i‖F ≤ δi, i ∈ S, (56b)
‖vec (Vi)‖22 ≤ Pi, i ∈ SUL, (56c)‖bvec (Vi)ci∈SDL‖22 ≤ P0, (56d)
‖ιl‖22 ≤ λl, ‖Λl‖F ≤ θl, l = 1, . . . , L. (56e)
Semi-infinite optimization problems can be formulated interms of LMIs. Such a reduction, if possible, has importantpractical consequences: It means that those semi-infinite prob-lems can be solved efficiently with interior-point methods forLMI problems [42]. Note that the constraints (56b) and (56e)are not in the form of an LMI because the optimizationvariables do not appear linearly in these constraints. To recastthe semi-infinite problem (56) as a SDP problem, the Schurcomplement lemma [42] is used to rewrite the constraints (56b)and (56e) in LMI form10.
10Schur Complement Lemma is stated as follows: Let Q and R besymmetric matrices. Then the following two expressions are equivalent.[
Q SS∗ R
]� 0 , R � 0, Q− SR−1S∗ � 0.
The resulting optimization problem is written as
minV,U,τ
∑i∈S
τi (57a)
s.t.[τi µHiµi IAi
]� 0, ‖∆i‖F ≤ δi, i ∈ S, (57b)
‖vec (Vi)‖22 ≤ Pi, i ∈ SUL, (57c)‖bvec (Vi)ci∈SDL‖22 ≤ P0, (57d)[λl ιHlιl IBl
]� 0, ‖Λl‖F ≤ θl, l = 1, . . . , L,(57e)
where the dimensions of the identity matrices in (57b)and (57e) are given in (22) and (23), respectively.
To further simplify the problem (57), the following lemmafrom [32] is used to relax the semi-infiniteness of the con-straints (57b) and (57e), see also [45] for a similar approach.
Lemma 1: Given matrices P, Q, A with A = AH , thesemi-infinite LMI of the form of
A � PHXQ + QHXHP, ∀X : ‖X‖F ≤ ρ,holds if and only if ∃ε ≥ 0 such that[
A− εQHQ −ρPH
−ρP εI
]� 0. (58)
To apply Lemma 1, we need to separate the estimatedchannel and the channel estimation error. To this end, the LMIin (57b) is first expressed as[
τi µHiµi IAi
]+
[0 µH∆i
µ∆i0Ai×Ai
]� 0, (59)
where µi is defined in (24) and µ∆i= D∆i
vec (∆i), whereD∆i
is defined in (25). By choosing
A =
[τi µHiµi IAi
], P =
[0NiM×1, DH
∆i
], (60)
X = vec (∆i) , Q = [−1,01×Ai] , (61)
and applying Lemma 1, the LMI in (57b) is relaxed as τi − εi µHi 01×NiMµi IAi
−δiD∆i
0NiM×1 −δiDH∆i
εiINiM
� 0, i ∈ S, (62)
εi ≥ 0, i ∈ S. (63)Using a similar procedure, the LMI in (57e) is expressed as[
λl ιHlιl IBl
]+
[0 ιHΛl
ιΛl0Bl×Bl
]� 0, (64)
where ιl is given in (26) and ιΛl= EΛl
vec (Λl), where EΛl
is defined in (27). Then the LMI in (57e) is relaxed as λl − ηl ιHl 01×TlM
ιl IBl−θlEΛl
0TlM×1 −θlEHΛl
ηlITlM
� 0, l = 1, . . . , L, (65)
ηl ≥ 0, l = 1, . . . , L. (66)Using the relaxed LMIs in (62) and (65), the SDP problem,which is equivalent to (19) can be formulated as (21).
APPENDIX B: MSE COMPUTATION
Using (13), tr{MSEi} can be written as
tr{MSEi} = tr{(
UHi HiiVi − Idi
) (UHi HiiVi − Idi
)H+ UH
i ΣiUi
}= tr
{(UHi HiiVi − Idi
) (UHi HiiVi − Idi
)H}(67)

14
+∑
j∈S,j 6=itr{UHi HijVjV
Hj HH
ijUi
}+ σ2
i tr{UHi Ui
}+∑
j∈S
∑`∈D(T )
j
κtr{UHi HijΓ`VjV
Hj ΓH` HH
ijUi
}+∑
j∈S
∑`∈D(R)
i
βtr{UHi Γ`HijVjV
Hj HH
ijΓH` Ui
},
where D(R)j represents the set {1 · · · Nj}, D(T )
j representsthe set {1 · · · Mj} and Γ` is a square matrix with zeroelements, except for the `-th diagonal element, equal to 1.Applying the vec(·) operation, and the identity ‖vec (A) ‖22 =tr{AAH
}, (67) can be rewritten as
tr{MSEi} =∥∥vec (UH
i HiiVi
)− vec(Idi)
∥∥2
2(68)
+∑
j∈S,j 6=i
∥∥vec (UHi HijVj
)∥∥2
2+ σ2
i ‖vec (Ui)‖22
+∑
j∈S
∑`∈D(T )
j
κ∥∥vec (UH
i HijΓ`Vj
)∥∥2
2
+∑
j∈S
∑`∈D(R)
i
β∥∥vec (UH
i Γ`HijVj
)∥∥2
2.
Using the identity vec(ABC) =(CT ⊗A
)vec (B), (68) can
be written as ‖µi‖22, where µi is given in (54).
Similar to (68), IPUl can be written as
IPUl =∑
j∈S
(‖vec (GljVj)‖22
+∑
`∈D(T )j
κ ‖vec (GljΓ`Vj)‖22
). (69)
Using the identity vec(ABC) =(CT ⊗A
)vec (B), (69) can
be written as ‖ιl‖22, where ιl is given in (55).
REFERENCES
[1] A. C. Cirik, S. Biswas, O. Taghizadeh, A. Liu, T. Ratnarajah, “Robusttransceiver design in full-duplex MIMO cognitive radios,” IEEE Int.Conf. Commun. (ICC), pp. 1-7, May 2016.
[2] Chih-Lin I, C. Rowell, S. Han, Z. Xu, G. Li and Z. Pan, “Towards greenand soft: A 5G perspective,” IEEE Comm. Mag., Feb. 2014.
[3] M. Duarte, C. Dick, and A. Sabharwal, “Experiment-driven characteri-zation of full-duplex wireless systems,” IEEE Trans. Wireless Commun.,vol. 11, no. 12, pp. 4296-4307, Dec. 2012.
[4] D. Bharadia and S. Katti, “Full duplex MIMO radios,” USENIX NSDI,pp. 359-372, 2014.
[5] Y. Hua, Y. Ma, A. Gholian, Y. Li, A. C. Cirik, P. Liang, “Radio self-interference cancellation by transmit beamforming, all-analog cancella-tion and blind digital tuning,” Elsevier Signal Process., vol. 108, pp.322-340, Mar. 2015.
[6] A. Sahai, G. Patel, C. Dick, and A. Sabharwal, “On the impact of phasenoise on active cancelation in wireless full-duplex,” IEEE Trans. Vel.Technol., vol. 62, no. 9, pp. 4494-4510, Nov. 2013.
[7] B. P. Day, A. R. Margetts, D. W. Bliss, and P. Schniter, “Full-duplexbidirectional MIMO: Achievable rates under limited dynamic range,”IEEE Trans. Signal Process., vol. 60, no. 7, pp. 3702-3713, July 2012.
[8] W. Li, J. Lilleberg, and K. Rikkinen, “On rate region analysis of half- andfull-duplex OFDM communication links,” IEEE J. Sel. Areas Commun.,vol. 32, no. 9, pp. 1688-1698, Sept. 2014.
[9] A. C. Cirik, S. Biswas, S. Vuppala and T. Ratnarajah, “Beamformingdesign for full-duplex MIMO interference channelsQoS and energy-efficiency considerations,” IEEE Trans. Communications, vol. 64, no.11, pp. 4635-4651, Nov. 2016.
[10] A. C. Cirik, O. Taghizadeh, L. Lampe, R. Mathar and Y. Hua, “Lineartransceiver design for full-duplex multi-cell MIMO systems,” IEEEAccess, vol. 4, pp. 4678-4689, 2016.
[11] A. C. Cirik, R. Wang, Y. Rong and Y. Hua, “MSE based transceiverdesigns for bi-directional full-duplex MIMO systems,” in Proc. IEEESPAWC. pp. 384-388, 2014.
[12] A. C. Cirik, R. Wang, Y. Rong, and Y. Hua,“MSE-based transceiverdesigns for full-duplex MIMO cognitive radios,” IEEE Trans. Commun.,vol. 63, no. 6, pp. 2056-2070, Jun. 2015.
[13] T. M. Kim, H. J. Yang, and A. Paulraj, “Distributed sum-rate optimiza-tion for full-duplex MIMO system under limited dynamic range,” IEEESignal Process. Letters, vol. 20, no. 6, pp. 555-558, Jun. 2013.
[14] D. Nguyen, L. Tran, P. Pirinen, and M. Latva-aho, “On the spectralefficiency of full-duplex small cell wireless systems,” IEEE Trans.Wireless Commun., vol. 13, no. 9, pp. 4896-4910, Sept. 2014.
[15] S. Li, R. Murch, and V. Lau, “Linear transceiver design for full-duplexmulti-user MIMO system,” in Proc. IEEE ICC, pp. 4921-4926, Jun. 2014.
[16] S. Haykin, “Cognitive radio: brain-empowered wireless communica-tions,” IEEE J. Sel. Areas Commun., vol. 23, no. 2, pp. 201-220, Feb.2005.
[17] Q. Zhao and B. M. Sadler, “A survey of dynamic spectrum access,”IEEE Signal Processing Magazine, vol. 24, no. 3, pp. 79-89, May 2007.
[18] G. Zheng, S. Ma, K. Kit Wong, and T.-S. Ng, “Robust beamformingin cognitive radio,” IEEE Trans. Wireless Commun., vol. 9, no. 2, pp.570-576, Feb. 2010.
[19] L. Zhang, Y.-C. Liang, Y. Xin, and H. V. Poor, “Robust cognitive beam-forming with partial channel state information,” IEEE Trans. WirelessCommun., vol. 8, no. 8, pp. 4143-4153, Aug. 2009.
[20] Y. Zhang, E. DallAnese, and G. B. Giannakis, “Distributed optimalbeamformers for cognitive radios robust to channel uncertainties,” IEEETrans. Signal Process., vol. 60, no. 12, pp. 6495-6508, Dec. 2012.
[21] J. Wang, G. Scutari, and D. P. Palomar, “Robust MIMO cognitive radiovia game theory,” IEEE Trans. Signal Process., vol. 59, no. 3, pp. 1183-1201, Mar. 2011.
[22] G. Zheng, K. K. Wong, and B. Ottersten, “Robust cognitive beamform-ing with bounded channel uncertainties,” IEEE Trans. Signal Process.,vol. 57, no. 12, pp. 4871-4881, Dec. 2009.
[23] E. A. Gharavol, Y.-C. Liang, and K. Mouthaan, “Robust lineartransceiver design in MIMO ad hoc cognitive radio networks withimperfect channel state information,” IEEE Trans. Wireless Commun.,vol. 10, no. 5, pp. 1448-1457, May 2011.
[24] D. P. Bertsekas, “Nonlinear Programming”, 2nd ed. Belmont, MA:Athena Scientific, 1999.
[25] A. Mutapcic and S. Boyd, “Cutting-set methods for robust convexoptimization with pessimizing oracles,” Optim. Methods Softw., vol. 24,no. 3, pp. 381-406, Jun. 2009.
[26] A. Mutapcic, S. Kim, and S. Boyd, “A tractable method for robustdownlink beamforming in wireless communications,” in Proc. ACSSC,pp. 1224-1228, Nov. 2007.
[27] S. Huberman and T. Le-Ngoc, “Full-duplex MIMO precoding for sum-rate maximization with sequential convex programming,” IEEE Trans.Wireless Commun., vol. 64, no. 11, pp. 5103-5112, Nov. 2015.
[28] S. Huberman and T. Le-Ngoc, , “MIMO full-duplex precoding: a jointbeamforming and self-interference cancellation structure,” IEEE Trans.Wireless Commun., vol. 14, no. 4, pp. 2205-2217, Apr. 2015.
[29] P. Wu, R. Schober and V. K. Bhargava, “Robust transceiver design forSC-FDE multi-hop full-duplex decode-and-forward relaying systems,”IEEE Trans. Wireless Commun., vol. 15, no. 2, pp. 1129-1145, Feb. 2016.
[30] J. Zhang, O. Taghizadeh, and M. Haardt, “Robust transmit beamformingdesign for full-duplex point-to-point MIMO systems,” in Proc. ISWCS,pp. 1-5, 2013.
[31] R. Feng, Q. Li, Q. Zhang, and J. Qin, “Robust secure beamforming inMISO full-duplex two-way secure communications,” IEEE Trans. Veh.Technol., vol. 65, no. 1, pp. 408-414, Jan. 2016.
[32] Y. C. Eldar, A. Ben-Tal, and A. Nemirovski, “Robust mean-squared-error estimation in the presence of model uncertainties,” IEEE Trans.Signal Process., vol. 53, no. 1, pp. 161-176, Jan. 2005.
[33] H. Suzuki, T. V. A. Tran, I. B. Collings, G. Daniels, and M. Hedley,“Transmitter noise effect on the performance of a MIMO-OFDM hard-ware implementation achieving improved coverage,” IEEE J. Sel. AreasCommun., vol. 26, no. 6, pp. 867-876, Aug. 2008.
[34] W. Namgoong, “Modeling and analysis of nonlinearities and mis-matches in AC-coupled direct-conversion receiver,” IEEE Trans. WirelessCommun., vol. 4, no. 1, pp. 163-173, Jan. 2005.
[35] G. Scutari, D. P. Palomar, and S. Barbarossa, “Cognitive MIMO radio,”IEEE Signal Process. Mag., vol. 25, no. 6, pp. 46-59, Nov. 2008.

15
[36] G. Scutari, D. Palomar, F. Facchinei, and J.-S. Pang, “Flexible designof cognitive radio wireless systems: From game theory to variationalinequality theory,” IEEE Signal Proc. Mag., vol. 26, no. 5, pp. 107-123,Sept. 2009.
[37] G. Scutari and D. P. Palomar, “MIMO cognitive radio: A game-theoretical approach,” IEEE Trans. Signal Process., vol. 58, no. 2, pp.761-780, Feb. 2010.
[38] S.-J. Kim and G. B. Giannakis, “Optimal resource allocation for MIMOad hoc cognitive radio networks,” IEEE Trans. Inf. Theory, vol. 57, no.5, pp. 3117-3131, May 2011.
[39] O. Simeone, U. Spagnolini and Y. Bar-Ness, “Linear and non-linearprecoding/decoding for MIMO systems using the fading correlation atthe transmitter,” in Proc. IEEE SPAWC, pp. 6-10, Jun. 2003.
[40] N. I. Miridakis and D. D. Vergados, “A survey on the successiveinterference cancellation performance for single-antenna and multiple-antenna OFDM systems,” IEEE Commun. Surveys and Tut., vol. 15, no.1, pp. 312-335, 2013.
[41] A. Ben-Tal and A. Nemirovski, Lectures on Modern Convex Optimiza-tion: Analysis, Algorithms, Engineering Applications. Philadelphia, PA,USA: SIAM, 2001.
[42] S. Boyd and L. Vandenberghe, Convex Optimization. Cambridge Uni-versity Press, 2004.
[43] M. Botros Shenouda and T. N. Davidson, “On the design of lineartransceivers for multiuser systems with channel uncertainty,” IEEE J.Sel. Areas Commun., vol. 26, no. 6, pp. 1015-1024, Aug. 2008.
[44] E. A. Gharavol and E. G. Larsson, “The sign-definiteness lemma andits applications to robust transceiver optimization for multiuser MIMOsystems,” IEEE Trans. Signal Process., vol. 61, no. 2, pp. 238-252, Jan.2013.
[45] J. Jose, N. Prasad, M. Khojastepour and S. Rangarajan, “On robustweighted-sum rate maximization in MIMO interference networks,” inProc. IEEE ICC, pp. 1-6, Jun. 2011.
[46] K. Phan, S. Vorobyov, N. Sidiropoulos, and C. Tellambura, “Spectrumsharing in wireless networks via QoS-Aware secondary multicast beam-forming,” IEEE Trans. Signal Process., vol. 57, no. 6, pp. 2323-2335,Jun. 2009.
[47] T. W. Ban, W. Choi, B. C. Jung, and D. K. Sung, “Multi-user diversityin a spectrum sharing system,” IEEE Trans. Wireless Commun., vol. 8,no. 1, pp. 102-106, Jan. 2009.
[48] A. Ghasemi and E. S. Sousa, “Fundamental limits of spectrum-sharingin fading environments,” IEEE Trans. Wireless Commun., vol. 6, no. 2,pp. 649-658, Feb. 2007.
[49] D. I. Kim, L. B. Le, and E. Hossain, “Joint rate and power allocation forcognitive radios in dynamic spectrum access environment,” IEEE Trans.Wireless Commun., vol. 7, no. 12, pp. 5517-5527, Dec. 2008.
[50] Q. Zhao, S. Geirhofer, L. Tong, and B. M. Sadler, “Opportunisticspectrum access via periodic channel sensing,” IEEE Trans. SignalProcess., vol. 56, no. 2, pp. 785-796, Feb. 2008.
[51] F. Gao, R. Zhang, Y.-C. Liang, and X. Wang, “Multi-antenna cognitiveradio systems: Environmental learning and channel training,” in Proc.IEEE ICASSP, Apr. 2009, pp. 2329-2332.
[52] E. A. Gharavol, Y.-C. Liang, and K. Mouthaan, “Robust downlinkbeamforming in multiuser MISO cognitive radio networks with imperfectchannel-state information,” IEEE Trans. Veh. Technol., vol. 59, no. 6, pp.2852-2860, Jul. 2010.
[53] J. M. Peha, “Approaches to spectrum sharing,” IEEE Commun. Mag.,vol. 43, no. 2, pp. 10-12, Feb. 2005.
[54] P. Ubaidulla and A. Chockalingam, “Relay precoder optimization inMIMO-relay networks with imperfect CSI,” IEEE Trans. Signal Process.,vol. 59, no. 11, pp. 5473-5484, Nov. 2011.
[55] J. Liu, F. Gao, and Z. Qiu, “Robust transceiver design for downlinkmultiuser MIMO AF relay systems,” IEEE Trans. Wireless Commun.,vol. 14, no. 4, pp. 2218-2231, Apr. 2015.
[56] P. Ubaidulla and S. Aissa, “Robust two-way cognitive relaying: Precoderdesigns under interference constraints and imperfect CSI,” IEEE Trans.Wireless Commun., vol. 13, no. 5, pp. 2478-2489, May 2014.
[57] M.-M. Zhao, Y. Cai, B. Champagne, and M. Zhao, “Min-Max MSEtransceiver with switched preprocessing for MIMO interference chan-nels,” in Proc. IEEE PIMRC, pp. 198-202, Sep. 2014.
[58] H. Shen, B. Li, M. Tao, and X. Wang, “MSE-based transceiver designs
for the MIMO interference channel,” IEEE Trans. Wireless Commun.,vol. 9, no. 11, pp. 3480-3489, Nov. 2010.
[59] 3GPP, TR 36.828, “Further enhancements to LTE time division duplex(TDD) for downlink-uplink (DL-UL) interference management and traf-fic adaptation (Release 11),” Jun. 2012.
[60] S. Goyal, P. Liu, S. Panwar, R. DiFazio, R. Yang, J. Li, and E. Bala,“Improving small cell capacity with common-carrier full duplex radios,”in Proc. IEEE ICC 2014, pp. 4987-4993, Jun. 2014.
Ali Cagatay Cirik (S’13-M’14) received the B.S andM.S. degrees in telecommunications and electron-ics engineering from Sabanci University, Istanbul,Turkey, in 2007 and 2009, respectively, and Ph.D.degree in electrical engineering from University ofCalifornia, Riverside in 2014. He held research fel-low positions at Centre for Wireless Communica-tions, Oulu, Finland and Institute for Digital Commu-nications (IDCOM), University of Edinburgh, U.Kbetween June 2014 and November 2015. His industryexperience includes internships at Mitsubishi Electric
Research Labs (MERL), Cambridge, MA, in 2012 and at Broadcom Corpo-ration, Irvine, CA, in 2013. Currently, he is working as a research scientistat Sierra Wireless, Richmond, Canada. He is also affiliated with Universityof British Columbia, Vancouver, Canada. His primary research interests arefull-duplex communication, non-orthogonal multiple-access (NOMA), MIMOsignal processing, and convex optimization.
Sudip Biswas (S’16-M’17) received the B.Tech.degree in electronics and communication engineeringfrom the Sikkim Manipal Institute of Technology,Sikkim, India, in 2010, the M.Sc. degree in signalprocessing and communications from the Universityof Edinburgh, Edinburgh, U.K., in 2013 and thePh.D. degree in digital communications at the Uni-versity of Edinburgh’s Institute for Digital Communi-cations in 2017. Currently he is working as a researchscientist at the Institute for Digital Communications(IDCOM), University of Edinburgh. His research
interests include various topics in wireless communications and networkinformation theory with particular focus on stochastic geometry and possible5G technologies such as massive MIMO, mmWave, full-duplex and NOMA.
Omid Taghizadeh received his M.Sc. degree inCommunications and Signal Processing in April2013, from Ilmenau University of Technology, Ilme-nau, Germany. From September 2013, he has beena research assistant in the Institute for TheoreticalInformation Technology, RWTH Aachen University.His research interests include full-duplex wirelesssystems, MIMO communications, optimization, andresource allocation in wireless networks.
Tharmalingam Ratnarajah (A’96-M’05-SM’05) iscurrently with the Institute for Digital Communica-tions, University of Edinburgh, Edinburgh, UK, asa Professor in Digital Communications and SignalProcessing and the Head of Institute for DigitalCommunications. His research interests include sig-nal processing and information theoretic aspects of5G and beyond wireless networks, full-duplex radio,mmWave communications, random matrices theory,interference alignment, statistical and array signalprocessing and quantum information theory. He has
published over 330 publications in these areas and holds four U.S. patents.He was the coordinator of the FP7 projects ADEL (3.7Me) in the area oflicensed shared access for 5G wireless networks and HARP (3.2Me) in thearea of highly distributed MIMO and FP7 Future and Emerging Technologiesprojects HIATUS (2.7Me) in the area of interference alignment and CROWN(2.3Me) in the area of cognitive radio networks. Dr Ratnarajah is a Fellowof Higher Education Academy (FHEA), U.K..