dynamic simulation and design of rf-mems switches made of steel
67
DYNAMIC SIMULATION AND DESIGN OF RF-MEMS SWITCHES MADE OF STEEL A PROJECT REPORT SUBMITTED IN PARTIAL FULFILLMENT REQUIREMENTS FOR THE DEGREE OF Master of Engineering Master of Engineering Master of Engineering Master of Engineering IN FACULTY OF ENGINEERING BY GAURAV NAIR Department of Mechanical Engineering Indian Institute of Science BANGALORE - 560012 June, 2012
Transcript of dynamic simulation and design of rf-mems switches made of steel

DYNAMIC SIMULATION AND DESIGN OF
RF-MEMS SWITCHES MADE OF STEEL
A PROJECT REPORT
SUBMITTED IN PARTIAL FULFILLMENT
REQUIREMENTS FOR THE DEGREE OF
Master of EngineeringMaster of EngineeringMaster of EngineeringMaster of Engineering
IN
FACULTY OF ENGINEERING
BY
GAURAV NAIR
Department of Mechanical Engineering
Indian Institute of Science
BANGALORE - 560012
June, 2012

ii
Acknowledgements
Many people deserve my heart-felt thanks for their help during my graduate work. First
and foremost, I would like to thank my advisor, Prof. G. K. Anathasuresh, for his
enduring support and encouragement. I have appreciated his ability to guide me toward
appropriate solutions to the problems I have had to face. I also would like to thank him
for letting me use his codes for solving coupled-electromechanical problems. The switch
I was working on was designed by Subajit Banerjee and was fabricated in collaboration
with the University of Michigan, Ann Arbor, by Fatih Mert Ozkeskin. I would like to
thank them both for their prompt reply whenever I had any doubts. I would also like to
thank Harish Varma for his help in debugging Matlab codes, Puneet Singh for his help in
generating solid models in Solidworks. I would also like to thank Sudhanshu Shekhar for
his support in modeling of coupled electrostatic problems in CoventorWare. I would also
like to thank Rakesh Pathak for the help with formatting of the final report. The members
of M2D2, M2 and CONE lab, who gave valuable inputs and suggestions during group
meetings. I would also like to thank Dr. Adarsh V. K. for his help with post processing of
output files of ANSYS.
Last but not the least; I would also like to thank the Indian Institute of Science for
equipping me with required skills, knowledge, and facilities for pursuing my research.

iii
Abstract
The focus of this research is on analysis, and re-design of contact type Radio Frequency
Micro-Electro-Mechanical Systems (RF-MEMS) switch that has high power-handling
(250 W) capability. This work is a continuation of Banerjee’s ME project work (2011)
that improved the switch through shape optimization by minimizing the pull-in voltage
without compromising the recoil force. This work began by analyzing the discrepancy
between the experimental and simulated pull-in voltages of Banerjee’s optimized switch.
Analysis that allowed the possibility of tilting of the switch during assembly supported the
experimental values of pull-in voltage. This insight pointed to the need to have caution
during the assembly of the switch. The subsequent work was focused on improving the
performance of the switch. Increasing the contact gap and inclusion of holes on the
switch are suggested to decrease the contact resistance and switching time respectively,
without altering the optimal shape of the switch. A novel design concept is proposed by
including a contact bump that increases the stiffness after the pull-in of the switch by
reducing the effective length of the beam of the switch.
The analysis that supported the aforementioned design improvements of the switch
includes the estimation of performance characteristics such as pull-in voltage, switching
time, recoil force, and contact parameters. The Recoil force is evaluated using finite
element (FE) beam model as well as 3D FE modeling. The contact parameters are
evaluated using 3D FE modeling. Pull-in voltage is evaluated using a combination of the
FE model (both 3D and 1D), relaxation scheme, and the bisection algorithm. The
switching time is obtained by solving the Euler-Bernoulli beam equation with the help of
normal mode summation method for which the damping parameters are evaluated using
the modal projection method.
The outcome of the work is a new set of improved designs for the switch that could be
prototyped using the same process as that used for Banerjee’s switch in 2011.

iv
Contents 1. Introduction .................................................................................................................................. 1
1.1. Background and Motivation ............................................................................................ 1
1.2. Scope of the work ............................................................................................................ 2
1.3. Organization of the Report ............................................................................................... 3
2. Literature Review......................................................................................................................... 4
2.1. RF-MEMS switches and reliability.................................................................................. 4
2.2. Dynamics and squeeze film damping .............................................................................. 4
2.3. Contact resistance ............................................................................................................ 7
2.4. Modeling of contact when considering beam dynamics .................................................. 8
2.5. High recoil force .............................................................................................................. 8
3. Description of the problem and formulation .............................................................................. 10
3.1. Description of the problem ............................................................................................ 10
3.2. 1D lumped model dynamics .......................................................................................... 12
3.3. Beam model with damping ............................................................................................ 14
3.4. Recoil force .................................................................................................................... 17
3.5. Contact resistance ............................................................................................................... 19
4. Results and discussion ............................................................................................................... 20
4.1. Lumped model ............................................................................................................... 20
4.2. Beam model ................................................................................................................... 20
4.3. Discussion ...................................................................................................................... 22
4.3.1. Pull-in voltage discrepancy .................................................................................... 22
4.3.2. Improvement in contact resistance ......................................................................... 24
4.3.3. Improvement of the Pull-in time ............................................................................ 25
4.3.4. Recoil force ............................................................................................................ 26
5. Recoil force enhancement with nonlinear stiffness ................................................................... 27
5.1. Contact bumps ............................................................................................................... 27
5.2. Redesign of switches ...................................................................................................... 30
6. Summary and Conclusions ........................................................................................................ 33
Appendix ........................................................................................................................................ 34
A1. Modal projection method in Ansys and input files ........................................................ 34
A2. Matlab codes .................................................................................................................. 39
A3. Manuscript in preparation for possible submission to a journal .................................... 49
Bibliography .................................................................................................................................. 58

v
List of figures
Fig.2.1. Fixed-fixed type switch used in [25] displaying the nonlinear spring damper
foundation which is active only under compression. 8
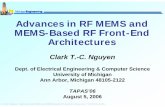
Fig.3.1. Scanning Electron Microscopes (SEM) micrographs for Design 2 in
Table 1. (a) Cantilever is shown upside down with recessed regions. (b)
Assembled structure with 6 µm gap between the cantilever and the
ground electrode shown in the inset. 10
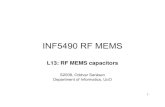
Fig.3.2. Dimensions of re-designed shapes which were fabricated. 11
Fig.3.3. Lumped approximation of a MEMS switch as a parallel-plate capacitor. 12
Fig.3. 4. Electrostatic force and the elastic restoring force for different actuation
voltages. It can be seen that the electrostatic force curve intersects the elastic
force curve at only one point (at 00.33z g= ). 13
Fig.3.5. Time response of the switch described in Fig. 3.3 for different values of ζ . 13
Fig.3. 6. Simplified model of the switch for beam FE analysis. 14
Fig.3. 7. Contributions of different modes during actuation. (a) Mode 1. (b) Mode 2. (c)
Mode 3. (d) Mode 4. (e) Mode 5. 16
Fig.3. 8. Pull-in time vs. voltage for the cantilever switch. The increase of actuation
voltage by 1.2 V reduces the pull-in time substantially and further increase in
actuation voltage has no significant effect on the pull-in time. 17
Fig.3. 9 (a) Linearly tapering switch with dimensions similar to [6]. (b) Pull-in voltage
and recoil force with taper angle of the beam with gaps and both as 8 µm. 18
Fig.3. 10. Cantilever beam coming into with the contact pad. Inset shows the hills of the
contacting surfaces coming in contact which reduces the actual area of contact. 19
Fig. 4.1. Time response of the six designs. The sharp rise in the displacement indicates
that pull-in has occurred and the corresponding time is taken as the pull-in
time. 21
Fig.4.2. (a)The beam tilts about the edge of the resting surface (axis shown) by 0.14o.
(b) Exaggerated 2D sectional view depicting the beam tilting by θ . 23
Fig.4.3. Pull-in voltage for different configurations obtained from experiments and
simulation by varying the actuation gap. 23
Fig.4.4. Effect on pull-in voltage with some amount of initial tilt given to the beam
which could occur during the assembly process. 24

vi
Fig.5.1. Cantilever with solid guide which exhibits nonlinear stiffness. 27
Fig.5.2 Electrostatic and elastic force acting on the beam for various values of
displacements applied to the tip of the beam. The applied voltage is 108.5 V
which is the pull-in voltage for the beam with zero slope. 28
Fig.5.3. Minimum tip displacement required for different slopes of the beam when the
pull-in voltage is applied. A cubic curve fit for the scattered data occurring due
to the approximate evaluation of the pull-in voltage due to the bisection
method. 28
Fig.5.4. The increase in recoil force due to the inclusion of contact bump. At 0o slope of
the beam the recoil force is more than double that of the configuration without
the bump. 29
Fig.5.5. The side view of the beam with the region where the thickness is to be reduced.
All other dimensions are the same as in [8]. 30
Fig.5.6. Switch with contact bump attached to the beam placed at 10 µm distance from
the actuation electrode. 32
Fig.A2.1 Pressure distribution for the beam mentioned in Section 3. For the first mode. 34

vii
List of Tables
Table 3.1. Data for the six optimized re-designed switches. 11
Table 3.2. Results of experiments of six optimized and redesigned switches. 11
Table 4.1. Lumped parameters and performance characteristics of the six designs. 19
Table 4.2. Results of simulation of six optimized and re-designed switches. 20
Table 4.3. Pull-in voltage when actuation gap is 3 µm and 0.0660 tilt is present. 21
Table 4.4. Contact force and resistance for contact gap of 6 µm. 23
Table 4.5. Q-factor for the first mode. 24
Table 4.6. Pull-in time for the with and without holes. 24
Table 5.1 Pull-in voltage for existing switch and the switch with reduced
thickness shown in Fig. 5.5. 29
Table 5.2. Recoil force for the existing switch, the modified switch with reduced
thickness and the modified switch with contact bump in mN. 29
Table 5.3. Recoil force comparison for existing switch with the increased contact
gap and the modified switch. 29

1
Chapter 1
Introduction
1.1. Background and Motivation
Micromachined radio-frequency (RF) switches, known as RF MEMS
(microelectromechanical systems) switches, have received much attention from academia
and industry ever since the MEMS field came into research focus [1,2]. The importance
of RF MEMS switches is underscored by the fact that they can be co-located with
digitally controllable circuit elements with a small footprint on the chip. Among different
types of actuation used, electrostatic actuation is the most common because of its low
power consumption. While linear behavior, low power consumption, low insertion loss,
high isolation, and low manufacturing cost are benefits of electrostatic micromechanical
switches, there is room for improvement in power handling capacity, switching times,
reliability, and actuation voltages as compared to purely electronic switches [3,4].
Switches made of silicon have power handling capacity of tens of W and beyond this
they tend to fail by stiction or adhesion. Also environmental factors require silicon
switches to be packaged, which proves to be expensive. Keeping these reasons in mind,
metals are used as the structural element in micro-switches [5]. In particular, steel was
assembled on a printed circuit board (PCB) [6] and the switch was shown to have up to
250 W of dissipative power capacity and occupied a small footprint of 6 mm2. Here, the
actuation voltage under cold-switching condition was over 300 V, actuation voltage
required for the functioning (hot-switching conditions) of this switch was 130 V, and the
actuation time was in ms range.
Increasing the actuation (i.e., switching) voltage reduces the switching time. But it
also increases the contact force that may cause increased adhesion and wear [7].
Therefore, Pt-Rh was used on the contact pads in [4] and [6]. Although it helped, the
problem remains that Pt-Rh is expensive and makes fabrication and assembly difficult.
Banerjee et al. [8] addressed the adhesion problem with a mechanical approach. That is,
they increased the recoil or spring-back force of the switch so that the switch can spring
back upon turning off the actuation voltage by breaking any unwanted fused connections
formed due to stiction or adhesion. Thus, it not only reduced the actuation voltage but
also alleviated problems associated with adhesion and wear.
RF-MEMS switches are aimed to replace the p-i-n diodes and field-effect
transistor (FET) diode switches which have the limitations of high insertion loss and low
isolation but have the advantage of very low switching times that is of the order of µs.
The switches mentioned in [6] have switching times in the ms range. Damping in the
micro-scale has significant effect on the response of a switch under actuation. The
millimeter order of dimensions and the micro-scale gaps between the switch and the
substrate account for very large damping forces compared to the electrostatic forces.

2
Improving the Q-factor leads to reduced damping force and hence decrease in the
switching times.
1.2. Scope of the work
This work considers the following four aspects that further improve the switch designs
reported by Ozkeskin [9] and Banerjee [10].
i. This work begins with the analysis of six switches prototyped at the University of
Michigan, Ann Arbor, USA by Ozkeskin [9] for which the designs were provided
by Banerjee [10] by means of optimization. The gap used in their switches is in
the range of a few microns but the planar dimensions of the switch are in the
millimeter range. Thus, slight error in the planar dimensions or manual assembly
can lead very big change in the gap between the actuation electrode and the
switch. The performance characteristics of the switch are highly dependent on the
gap as the electrostatic force is inversely proportional to the square of the gap [9].
The experimentally reported pull-in voltages are about one-third the values of the
simulated pull-in voltages reported in [9] and [10]. Since there is considerable
difference between the simulation and experimental results, there is a need to
investigate the reason behind this discrepancy. In this work, we investigate
various possibilities that could lead to the decrease in pull-in voltage after
assembly of the switch.
ii. Contact resistance plays an important role in ensuring the reliability of an RF-
MEMS switch. Most switches fail when the contact resistance increases beyond 5
Ω. In practice, in order to have realiable performance in repeated operation,
contact resistance of less than 1 Ω is preferred [16]. No study had been conducted
on the contact resistance that occurs during the closing of Ozkeskin’s [9] switch.
In this work, evaluation of contact resistance and redesign of the switch based on
the contact resistance are pursued. Contact parameters, i.e., the contact force and
contact area, are evaluated by means of 3D FEA and Holm’s model [17] is used
for evaluating the contact resistance.
iii. Fast switching time is a desired characteristic of a good RF-MEMS switch. Pull-
in times were measured during the experiment but this was not simulated by
Banerjee [10]. This work considers the dynamic modeling of the switch to
estimate the pull-in time. This requires us to consider the squeezed-film effect due
the air in the narrow gaps of the switch [11]. As coupled 3D simulation of
squeezed-film effects with the deformation of the electrostatically actuated body
of the switch is time-consuming, normal mode summation method [13] in
conjunction with modal projection method [14] are used in this work to develop a
quick method to capture the dynamic response of the switch. The method is also

3
extended to handle the presence of holes in the beam of the switch, which reduces
the squeezed-film effect without disturbing the optimal width profile of the beam.
iv. By noting that the recoil force, which is important for preventing the adhesion
problem, has positive correlation with the stiffness of the switch, Banerjee [10]
had used optimization of the width profile of the beam of the switch to increase
the recoil force. In this work, a new approach is proposed to increase the recoil
force by increasing the stiffness of the beam after the pull-in by incorporating a
contact bump that decreases the effective length of the beam. This approach
substantially increases the recoil force while keeping the actuation voltage low.
1.3. Organization of the Report
Literature on RF-MEMS switches and their reliability, dynamic modeling of MEMS
switches with squeeze film effect and methods to evaluate contact resistance are briefly
presented in Chapter 2. Chapter 3 contains the description of the problem and various
models and methods used for evaluation of the performance characteristics, i.e., the pull-
in voltage, contact resistance, pull-in time, and the recoil force. Chapter 4 contains the
results of the analysis that give the performance characteristics of the switch.
Discrepancy between the results obtained by simulation and experiment are discussed
here. Also discussed are some improvements related to contact parameters and switching
times. Described in Chapter 5 is a new method to improve the recoil force. This chapter
also contains the details of the redesigned switch and its comparison with the existing
designs. Concluding remarks are in Chapter 6. Appendices contain the input files of
ANSYS software, MATLAB codes, and a manuscript in preparation for possible
submission to a journal.

4
Chapter 2
Literature Review
2.1. RF-MEMS switches and reliability
RF-MEMS switches achieve a short or open circuit by mechanical motion of a structural
element. This mechanical motion is achieved by means of electrostatic, piezoelectric,
magnetostatic force or deformation due to thermal effects. Among these, electrostatic
type switches have shown reliable operations for 0.1-100 GHz applications. However,
RF-MEMS suffer from a few limitations. These include slow switching time, low power
handling capability, high packaging cost and relatively low reliability. As the input power
to the switch increases the reliability of the switch comes down. This is because in high
power applications the failure occurs due to stiction or adhesion. A lot of research has
gone into finding solutions to these problems. Some of them include change in material
properties and inclusion of heat sinks. Pt-Rh contact element along with a heat sink made
up of four micro-rods connected to the contact element via a ball[6] was able to address
the problem but the complexity involved was high. Purely mechanical means for
overcoming the problem of stiction and adhesion was explored by Banerjee et al. [8] by
posing and solving an optimization problem. They considered the recoil force, force with
which the switch will come back once the actuation voltage is turned off was taken as the
objective function. A volume constraint was imposed on the amount of material to be
used so that the switch remains within 6 mm2 foot-print area. It was found that linearly
tapering profile was optimum and six such linear profiles with varying taper angle were
fabricated and tested at the University of Michigan, Ann Arbor, USA. Details of the
variational formulation and optimization are given in [10]. The structural element used
there was steel that again scores over silicon switches. This is because silicon switches,
unlike steel switches, require hermetic packaging in inert atmospheres, which increases
the cost.
2.2. Dynamics and squeeze film damping
Banerjee et al. [8] in their design did not take into account the dynamic behavior of the
switch. Experimental observation revealed that the pull-in times for these switches were
below 8 ms which is a significant improvement over the switch in [6] which had a pull-in
time of 16 ms. Dynamics of parallel-plate and torsional switches are studied in detail in
[19] where it is proved that dynamic pull-in voltage is lower than the static pull-in
voltage. For the undamped case dynamic pull-in voltage for the parallel-plate is 92% of
the value of static pull-in voltage and is 91% of the value of static pull-in voltage for the
torsional switch. The analysis of undamped system is of little use as at the microscale
where the effect of squeeze film damping is significant. Squeeze film damping occurs
due to the change in pressure distribution on the surface of switch as the fluid film

5
between the switch and the substrate is compressed. The pressure distribution is governed
by the Reynold’s equation [11], given by
t
p
Phdt
dh
hy
p
x
p
∂
∂+=
∂
∂+
∂
∂
0
2
0
3
0
2
2
2
2 1212 µµ (2.1)
where p is the excess pressure in the film, µ the coefficient of viscosity, h the
instantaneous thickness of the film, 0h the initial thickness of the film and 0P the
reference pressure. When the mean free path of the fluid, λ , is comparable to the
thickness of the film the viscosity of the fluid becomes a function of Knudsen number,
Kn , given by 0/ hλ . An empirical relation for effective viscosity was given by Veijola et
al. [20]
159.1658.91 Kn
eff+
=µ
µ (2.2)
Starr exploited the similarity between the Eqn 2.1 and the transient heat equation
[21]. Finite element formulation of the transient heat problem is well developed [22] and
available in many commercial softwares like COMSOL Multiphysics (www.comsol.com)
and ANSYS (www.ansys.com). The transient heat equation is given by
t
TCQ
y
T
x
Tk p
∂
∂+−=
∂
∂+
∂
∂ρ
2
2
2
2
(2.3)
where k is the thermal conductivity, Q the heat source density, ρ the density and pC
the specific heat and T the temperature variable.
In order to evaluate the damping force acting on the structure we have to evaluate
the pressure at every instant as the beam deforms. This leads to a coupled problem where
the state variables wvu ,, and p are all being functions of spatial coordinates, zyx ,, and
time, t . Too many variables lead to very large computation times. The usage of beam
elements and normal mode summation method [13] reduce the number of variables
considerably. The dynamic response for a beam is given by
ed F
t
wc
t
wA
x
wEI =
∂
∂+
∂
∂+
∂
∂2
2
4
4
ρ (2.3a)
where, eF is the electrostatic force on the beam, EI the flexural rigidity, dρ the mass per
unit length of the beam, c the damping coefficient. Now discretization by finite element
formulation leads to the equation of the form
eMw + Cw + kw = Fɺɺ ɺ (2.3b)

6
where M,C and K are the mass, damping and stiffness matrices respectively. The
displacement vector, w , can be written as a linear combination of eigen-vectors, iφ and
generalized coordinates, iη where Ntoi 1= . N is the number of modes to be taken into
consideration. Let p be the matrix containing all eigen-vectors of the system and η be
the vector of the generalized coordinates. Then the displacement vector w can be written
as pη . Using the orthogonality property of the eigen-vectors [13], Eqn. (3b) on
premultiplicaion by Tp is reduced to a set of linear equations with iη as the variables
given by
T
eMη+ Cη+ Kη= p Fɶɶ ɶɺɺ ɺ (2.3c)
where Mɶ and Kɶ are diagonal due to the property of orthogonality. Cɶ can also be
diagonalised if the damping matrix, C , is expressed as a linear combination of mass and
stiffness matrices i.e. α β= +C M K [13]. This idea of applying a proportional damping is
also known as Rayleigh damping. If the damping ratio is known for the modes of for the
first and last modes of interest, the matrix C can be generated by finding the coefficients
βα & . For a one degree of freedom spring, mass and dashpot system with mass m ,
damping coefficient c given by km βα + and stiffness k and forcing term F the
equation of motion is given by
m
Fx
m
kxkm
mx =+++ ɺɺɺ )(
1βα (2.4)
Comparison of the coefficient of xɺ of Eqn. (2.4) with the equation of a second order
system given by
mFxxx nnn /2 2 =++ ωωζ ɺɺɺ (2.5)
gives the equation of damping ratio as
+= n
n
n βωω
αζ
2
1 (2.6)
If the range of interest is the first N modes then two linear equations containing α and
β the variables can be formed by writing Eqn. (2.6) for the first and the th
N mode.
Solution of the two linear equations gives
2
1
2
111
)(2
ωω
ωζωζωωα
−
−=
N
NNN (2.7)

7
2
1
2
11 )(2
ωω
ωζωζβ
−
−=
N
NN (2.8)
Thus, if the natural frequency and the damping ratio of the first and last mode under
consideration are known the dynamic response of the beam can be obtained. In [23] it is
mentioned that at least five modes are required to capture accurately the response of a
beam in motion. The electrostatic force can be easily evaluated by making use of parallel-
plate approximation but damping force remains a concern. Hung and Senturia, in [24],
have simulated the beam undergoing deformation due to electrostatic force with a fluid
between the beam and the electrode but the solution cannot be generalized to any switch.
In [23,25], constant damping is applied for all modes to simplify analysis. A very quick
and easy method is suggested by Mehner et al. [14] where the modal projection method is
used to extract the damping ratio associated with a particular mode. The DMPEXT
command macro of the commercial software ANSYS readily extracts the damping ratio
for different structures with different boundary conditions. Inclusion of perforations in
the structural element reduces the effect of damping considerably. In [15] the area ratio
and number of holes are varied and a parametric study is conducted to evaluate the
damping ratio.
2.3. Contact resistance
While the switching time has no effect on the reliability of the switches, the contact
parameters are very important for ensuring reliable operation of the switch. A lower
contact area leads to high contact resistance which produces a lot heat given by tRI c
2 ,
where I is the current, cR the contact resistance, and t the time. In fact, this is the very
principle of spot welding which is used to attach two sheets of metal together by passing
a high current through a very small area on the sheets of metal [26]. Thus, there is a very
high chance of the switch getting stuck to the transmission line if the contact resistance is
high. It has been reported in [16] that switches usually fail when the contact resistance
exceeds 5 Ω. But, for design purposes contact resistances below 1 Ω are desired. Bromley
and Nelson, in [27] have experimentally verified that the apparent area of contact has no
effect on the contact resistance and it is the contact force that controls the contact
resistance. This is due the surface roughness of either surfaces coming in contact. Only
the hills of either contact surfaces come in contact leading to much lower actual contact
area and a much high contact resistance. Holm in [17], has given an expression for the
contact resistance if area of contact is considered to be of circular shape with radius a
aRc
2
ρ= (2.9a)
For dissimilar materials coming into contact an expression for the contact resistance is
given by [28]

aRc
4
21 ρρ +=
Thus, once the contact force is known Eqn. (2.9b) can be u
resistance.
2.4. Modeling of contact when considering beam dynamics
A very popular method to model contact is to model the surface against which the beam
will contact as a foundation of
beam touches the surface and
spring is commonly simulated using
Sigmoid function [30] and
Vyasarayani et al., in [25],
is the vertical displacement of the beam and
Heaviside function acting on the gap function will give a non
1dw > . When the beam impacts the surface some losses occur due to the impact and
give rise to deformation dependent damping
the contact function defined in [25
1),( txgkF n
cc
+=
where impµ is the coefficient of deformation dependent damping. The value of
subtracted from the right hand side of Eqn. (2.3a) to give the governing equation of beam
undergoing electrostatic actuation and contacting with a surface.
Fig.2.1. Fixed-fixed type beam
active only under compression
2.5. High recoil force
A lot of research has been conducted on the failure of MEMS switche
adhesion especially with respect to the material
power application switches
8
Thus, once the contact force is known Eqn. (2.9b) can be used to evaluate the contact
Modeling of contact when considering beam dynamics
A very popular method to model contact is to model the surface against which the beam
a foundation of nonlinear springs which become active only whe
beam touches the surface and only react on compression [22], [25] and [29
spring is commonly simulated using step functions such as Heaviside funct
] and simulated stiffness has high value of spring constant,
, in [25], first defined a gap function given by ),( txg =
is the vertical displacement of the beam and 1d is the gap as shown in Fig. 2.1. Thus,
viside function acting on the gap function will give a non-zero value only when
. When the beam impacts the surface some losses occur due to the impact and
give rise to deformation dependent damping [31] which is proportional to
t function defined in [25] takes the form
)),(( txgHt
gimp
∂
∂+ µ
is the coefficient of deformation dependent damping. The value of
ht hand side of Eqn. (2.3a) to give the governing equation of beam
undergoing electrostatic actuation and contacting with a surface.
beam used in [25] displaying the nonlinear spring damper foundation which is
compression.
High recoil force
A lot of research has been conducted on the failure of MEMS switches due to stiction and
adhesion especially with respect to the material [32]. Pt-Rh is used in a number of hig
power application switches [6]. Pt-Rh being a very expensive material, Banerjee et
(2.9b)
sed to evaluate the contact
A very popular method to model contact is to model the surface against which the beam
nonlinear springs which become active only when the
only react on compression [22], [25] and [29]. This type of
Heaviside function or
high value of spring constant, ck .
1dw −= where w
is the gap as shown in Fig. 2.1. Thus, the
zero value only when
. When the beam impacts the surface some losses occur due to the impact and
which is proportional to t
g
∂
∂. Finally,
(2.10)
is the coefficient of deformation dependent damping. The value of cF is
ht hand side of Eqn. (2.3a) to give the governing equation of beam
used in [25] displaying the nonlinear spring damper foundation which is
s due to stiction and
used in a number of high
Banerjee et al. [8]

9
used a purely mechanical approach for improving reliability and thereby avoiding Pt-Rh.
Even if the switch adheres to the transmission line the optimum design ensures that any
bonds formed between the transmission line and the switch will be broken by the recoil
or the spring back force, which is maximized by design.

Chapter 3
Description of the problem and formulation
3.1. Description of the problem
An optimized profile with high recoil force was designed
Ozkeskin [9] at the University of Michigan, Ann Arbor, USA. Even though the previo
design by Ozkeskin [6] did not require any sort of packaging , this design was superior to
the previous design as it did not contain the complexity
require any contact element like Pt
maximizing the recoil force
profile, and the other was a curve
work and the two solutions obt
The cantilever beam of the switch was photochemically etched from 50
SS304 foils (Kemac Technology Inc., CA). The recesses, as shown in Fig. 3.1(a), of 6
µm and 4 µm were machined using micro
Perforations of 300 µm diameter were located for the alignment and the attachment on
the PCB (Fig. 3.1(a)). A 600 µm
Circuits Inc., CO). Metal interconnect traces of 70 µm
and the contact pad. In such PCBs, 4
base, and 0.25-µm thick outer gold layer provided an electrical contact. Through vias were
located on the PCB for the subsequent attachment of the cantilever.
Fig.3.1. Scanning Electron Microscopes (SEM) micrographs for Design 2 in Table 1. (a) Cantilever is
shown upside down with recessed regions. (b) Assembled structure with 6 µm gap betwe
and the ground electrode shown in the inset.
For the assembly, alignment posts (1000 µm
machined from gold wire using µEDM, and
on the PCB (Fig. 10a). Conical
cantilever was assembled over the posts (Fig. 3.1(
epoxy (Creative Materials). The flatness of the cantilever was maintained during the
10
Description of the problem and formulation
Description of the problem
An optimized profile with high recoil force was designed Banerjee [10] and fabricated by
University of Michigan, Ann Arbor, USA. Even though the previo
] did not require any sort of packaging , this design was superior to
the previous design as it did not contain the complexity of the heat sink and did not
require any contact element like Pt-Rh which is expensive. The optimization problem of
maximizing the recoil force, in [10] led to two solutions. One was linearly tapering
other was a curve that was also almost linear. The details of optimization
work and the two solutions obtained are in [10].
The cantilever beam of the switch was photochemically etched from 50
SS304 foils (Kemac Technology Inc., CA). The recesses, as shown in Fig. 3.1(a), of 6
4 µm were machined using micro-electrodischarge machining (
Perforations of 300 µm diameter were located for the alignment and the attachment on
A 600 µm-thick Rogers 4003 was used as the substrate (Advanced
). Metal interconnect traces of 70 µm - thick Cu provided bias electrodes
and the contact pad. In such PCBs, 4-µm thick Ni was used as an adhesion layer on the Cu
µm thick outer gold layer provided an electrical contact. Through vias were
located on the PCB for the subsequent attachment of the cantilever.
Scanning Electron Microscopes (SEM) micrographs for Design 2 in Table 1. (a) Cantilever is
shown upside down with recessed regions. (b) Assembled structure with 6 µm gap betwe
and the ground electrode shown in the inset.
For the assembly, alignment posts (1000 µm-height; 300 µm
machined from gold wire using µEDM, and they were tightly fitted into the isolated
on the PCB (Fig. 10a). Conical wire tips facilitated the insertion of the cantilever. The
ssembled over the posts (Fig. 3.1(b)) and fixed by applying conductive
epoxy (Creative Materials). The flatness of the cantilever was maintained during the
and fabricated by
University of Michigan, Ann Arbor, USA. Even though the previous
] did not require any sort of packaging , this design was superior to
of the heat sink and did not
expensive. The optimization problem of
led to two solutions. One was linearly tapering
linear. The details of optimization
The cantilever beam of the switch was photochemically etched from 50 µm-thick
SS304 foils (Kemac Technology Inc., CA). The recesses, as shown in Fig. 3.1(a), of 6
electrodischarge machining (µEDM).
Perforations of 300 µm diameter were located for the alignment and the attachment on
thick Rogers 4003 was used as the substrate (Advanced
thick Cu provided bias electrodes
µm thick Ni was used as an adhesion layer on the Cu
µm thick outer gold layer provided an electrical contact. Through vias were
Scanning Electron Microscopes (SEM) micrographs for Design 2 in Table 1. (a) Cantilever is
shown upside down with recessed regions. (b) Assembled structure with 6 µm gap between the cantilever
height; 300 µm-diameter), were
tightly fitted into the isolated-vias
wire tips facilitated the insertion of the cantilever. The
and fixed by applying conductive
epoxy (Creative Materials). The flatness of the cantilever was maintained during the

11
assembly process with the help of a high resolution laser displacement sensor (Keyence
LK-G32).
TABLE 3.1
DATA FOR THE SIX OPTIMIZED AND RE-DESIGNED SWITCHES
Design No. Slope (°) 1W (in µm) 2W (in µm)
1 -13.7 2231 572
2 -6.1 1769 1042
3 -0.9 1463 1354
4 1.7 1308 1510
5 6.9 1000 1823
6 14.5 538 2293
1l = 500, 2l = 500, 3l = 1430, 4l = 130, 5l = 600, 6l = 200, and L = 3400 (all values are in µm).
Six such designs were fabricated with the shape shown in Fig. 3.2. Dimensions are
provided in Table 3.1. Figure 3.1 depicts Design 2. Ozkeskin conducted experiments on
these six designs to obtain the performance characteristics. Results of the experiment are
included in Table 3.2.
Fig.3.2. Dimensions of re-designed shapes which were fabricated.
TABLE 3.2
RESULTS OF EXPERIMENTS OF SIX OPTIMIZED AND RE-DESIGNED SWITCHES
Design No Pull-in voltage (V) Pull-in time (ms)
1 46.25 4-5
2 40.95 4-6
3 35.75 5-6
4 34.1 5-7
5 32.8 5-8
6 28.15 6-8

3.2. 1D lumped model dynamics
A computationally efficient way to model a system for dynamic analysis is to obtain the
lumped parameters for the system and solve it as a
a spring [33]. By lumping the mechanical elements the system can be ap
a single degree-of-freedom system whose governing equation is given by
2
0
2( )
AVmz kz
g z
ε+ =
−ɺɺ
Figure 3.3 shows the schematic of the lumped system where
mass, A the overlap area between the switch and the actuation electrode,
voltage and g the gap. Neglecting the
the system shown in Fig. 3.3. Figure 3.4 shows the electrostatic force
restoring force elF for various values of
value piV only one equilibrium position is found (intersection of the curves
where as when the voltage is set to
the left and unstable on the right. Thus it can be said that
applied voltage beyond which
term and solving the equation
which also is the point of intersection betwe
curve for piV as the actuation voltage. On substitution of
term as zero, we can find the closed form expression for
A
kgVpi
0
3
0
27
8
ε=
Fig.3.3. Lumped approximation of a MEMS switch as a
The solution of the lumped system given by Eqn. (3.1) gives an estimate of the dynamic
pull-in voltage. The system is solved
method for different actuation voltages. The time response of the switch for different
actuation voltages is given in Fig. 3.5. It can be seen that pull
approximately 92% of the valu
12
1D lumped model dynamics
A computationally efficient way to model a system for dynamic analysis is to obtain the
the system and solve it as a parallel-plate capacitor constrained by
. By lumping the mechanical elements the system can be ap
freedom system whose governing equation is given by 2
22( )
AV
g z
Figure 3.3 shows the schematic of the lumped system where k is the stiffness,
the overlap area between the switch and the actuation electrode,
the gap. Neglecting the zɺɺ term in Eqn. (3.1) we get the static equation of
the system shown in Fig. 3.3. Figure 3.4 shows the electrostatic force
for various values of z . It can be seen that when voltage is set to a
only one equilibrium position is found (intersection of the curves
where as when the voltage is set to piV8.0 two equilibrium positions are found, stable on
the left and unstable on the right. Thus it can be said that piV is the critical value of the
applied voltage beyond which the stable solution ceases to exist. By neglecting the
term and solving the equation 0/ =dzdV and solving z we get /0gz =
which also is the point of intersection between the electrostatic force and elastic force
as the actuation voltage. On substitution of 3/0gz = into Eqn. (3.1) with
term as zero, we can find the closed form expression for piV given by
Lumped approximation of a MEMS switch as a parallel-plate
The solution of the lumped system given by Eqn. (3.1) gives an estimate of the dynamic
in voltage. The system is solved in the time domain using Runge
method for different actuation voltages. The time response of the switch for different
actuation voltages is given in Fig. 3.5. It can be seen that pull-in of the switch occurs at
approximately 92% of the value of piV . The damping which has a significant effect at
A computationally efficient way to model a system for dynamic analysis is to obtain the
capacitor constrained by
. By lumping the mechanical elements the system can be approximated into
freedom system whose governing equation is given by
(3.1)
is the stiffness, m the
the overlap area between the switch and the actuation electrode, V the actuation
term in Eqn. (3.1) we get the static equation of
the system shown in Fig. 3.3. Figure 3.4 shows the electrostatic force eF and elastic
. It can be seen that when voltage is set to a
only one equilibrium position is found (intersection of the curves eF and elF )
two equilibrium positions are found, stable on
is the critical value of the
the stable solution ceases to exist. By neglecting the zɺɺ
3/ as the solution
en the electrostatic force and elastic force
into Eqn. (3.1) with zɺɺ
(3.2)
capacitor.
The solution of the lumped system given by Eqn. (3.1) gives an estimate of the dynamic
in the time domain using Runge-Kutta 4th
order
method for different actuation voltages. The time response of the switch for different
in of the switch occurs at
. The damping which has a significant effect at

13
the micron level is not considered here but if the value of the damping ratio ζ is known
the damping coefficient c can be easily obtained as kmζ2 . The evaluation of ζ for
different modes is discussed in the next section.
Fig.3.4. Electrostatic force and the elastic restoring force for different actuation voltages. It can
be seen that the electrostatic force curve intersects the elastic force curve at only one point (at
00 33.z g= ).
Fig.3.5. Time response of the switch described in Fig. 3.3 for different values of piVV / .

3.3. Beam model with
By referring to Fig. 3.6 that
Bernoulli beam equation that governs its static deformation as
(
2 2
2 22
d d w wEI d x d l
dx dx b
= + ≤ ≤ +
ɶ
where ( )w x is the transverse displacement of the beam,
modulus with E indicating the Young’s modulus and
moment of inertia, 0ε the permittivity of free space,
beneath the beam, d the distance from the fixed end of the cantilever beam to the start of
the actuation electrode,
actuation electrode, and L
the transverse electrostatic force per unit length of th
Parallel-plate approximation with fringing field appro
the electrostatic force acting on the beam.
Fig.3.6. Simplified model of the switch for beam FE analysis.
Equation (3.3) cannot be solved analytically because o
Finite element modeling is used to discretize Eq. (3.3) and then solved iteratively starting
with the initial zero deformation. It is a standard method to solve this equation and to find
the pull-in voltage at which the beam wou
solution ceases to exist. There is a small difference here because the beam is shown to be
slightly thicker at the free end with contact gap equal to
can be closed before the portion of the beam above the actuating electrode actually
touches and shorts with the electrode.
To validate the results of the beam analysis, 3D finite element modeling was used
to solve the coupled problems of electrostatics and elastos
software (www.cowentorware.com
14
with damping
that depicts a simplified version of the switch, we write Euler
Bernoulli beam equation that governs its static deformation as
( )
2
0
2
0 for
1 0.65 for2
0 for
a
x d
bd d w wEI d x d l
dx dx bg w
d l x L
ε φ
<
= + ≤ ≤ +
−
+ < ≤
is the transverse displacement of the beam, (/ 1E E= −ɶ
indicating the Young’s modulus and ν the Poisson’s ratio,
the permittivity of free space, b the width of the beam,
the distance from the fixed end of the cantilever beam to the start of
the actuation electrode, ϕ the applied electric potential between the beam and the
L the total length of the beam. The term on the right hand side is
the transverse electrostatic force per unit length of the beam that deflects the beam [3
plate approximation with fringing field approximation [34] is used for modeling
the electrostatic force acting on the beam.
. Simplified model of the switch for beam FE analysis.
quation (3.3) cannot be solved analytically because of the nonlinear force term.
Finite element modeling is used to discretize Eq. (3.3) and then solved iteratively starting
with the initial zero deformation. It is a standard method to solve this equation and to find
in voltage at which the beam would snap down catastrophically because a stable
solution ceases to exist. There is a small difference here because the beam is shown to be
slightly thicker at the free end with contact gap equal to c ag g< . Hence, the contact gap
osed before the portion of the beam above the actuating electrode actually
touches and shorts with the electrode.
To validate the results of the beam analysis, 3D finite element modeling was used
to solve the coupled problems of electrostatics and elastostatics in the CoventorWare
www.cowentorware.com). In addition to the pull-in (and hence actuation)
depicts a simplified version of the switch, we write Euler-
(3.3)
)2
/ 1 ν= − the biaxial
the Poisson’s ratio, I the area
the width of the beam, ag the gap
the distance from the fixed end of the cantilever beam to the start of
pplied electric potential between the beam and the
the total length of the beam. The term on the right hand side is
e beam that deflects the beam [33].
] is used for modeling
. Simplified model of the switch for beam FE analysis.
f the nonlinear force term.
Finite element modeling is used to discretize Eq. (3.3) and then solved iteratively starting
with the initial zero deformation. It is a standard method to solve this equation and to find
ld snap down catastrophically because a stable
solution ceases to exist. There is a small difference here because the beam is shown to be
. Hence, the contact gap
osed before the portion of the beam above the actuating electrode actually
To validate the results of the beam analysis, 3D finite element modeling was used
tatics in the CoventorWare
in (and hence actuation)

15
voltage, we also need the contact and recoil forces and switching time. Contact force is
the force felt by the contacting portion of the beam with the actuation voltage present.
The recoil force, as noted earlier, is defined as the force with which the beam would
spring back up after the actuation voltage is set to zero. The switching time is obtained by
performing the dynamic analysis.
The normal mode summation was discussed in the previous chapter. Time
response of the beam is evaluated using the ODE45 solver of Matlab
(www.mathworks.com) by normal mode summation. Only five modes are used to model
the system [23]. To estimate the damping, we use the modal projection method [14] to
evaluate the damping coefficient, ς . The steps used in damping parameter extraction in
ANSYS by modal projection method are described in Appendix A1. The structural
element is modeled in ANSYS as a cantilever with length 2900 µm, 1400 µm width and
50 µm thickness (similar to design 3 mentioned in Section 3.1) using SOLID45 elements
with properties of SS304. The fluid film thickness is assumed to be 6 µm and the fluid is
modeled using FLUID136 elements with properties of air. The beam is assumed to be
open at three sides that are not fixed and closed at the side that is fixed. Care has to be
taken so that we only extract the modes arising due to bending of the beam. The modal
analysis of the switch by keeping the left end of the beam fixed and the top and bottom
sides with roller supports reveals that the first five bending modes are 1,2,4,7 and 11. We
obtain the damping coefficient for the first mode, 1ς , as 3.204 and the fifth mode, 5ς , as
0.0014. This value of 1ς corresponds to a Q-factor value of 0.16 at resonance which is a
very conservative value for this design. This value of Q-factor can be easily improved to
a higher value by introduction of holes in the beam that reduces the effect of squeeze film
damping. The contour plots of pressure distribution on the beam surface are included in
Appendix A1.
Proportional damping is applied in the form of Rayleigh damping. The damping
matrix, C , is evaluated as α β+M K , where Mand K are mass and stiffness matrices
and α and β are constants and obtained by fixing the damping ratio, ς , equal to 3.204
for the first and 0.0014 for the fifth [22]. The electrostatic force is applied as considering
each element of the beam as a parallel-plate. The dynamic response is given by Eqn.
(2.3b) which can be converted into Eqn. (2.3c). Equation (2.3c) is solved using ODE45
solver of Matlab. The pull-in time is taken as the time taken for the switch to first touch
the contact pad. As the input voltage is increased, it is observed that the switch first
closes when the voltage is 110.8 V. This is taken as the dynamic pull-in voltage. Fig. 3.7
shows the contribution of each mode to the dynamic response of the switch. It can be
seen that mode 1 has the most significant contribution. Increasing the voltage beyond this
value results in decrease of the pull-in time as shown in Fig. 3.8. It can also be seen that
increasing the actuation voltage beyond 112 V does not have any significant effect on the
pull-in time.

16
Fig.3.7. Contributions of different modes during actuation. (a) Mode 1. (b) Mode 2. (c) Mode 3. (d) Mode 4. (e) Mode 5.

17
Modeling contact is unnecessary for the estimation of pull-in time. However, in
order to simulate lift-off, the beam must initially be in contact with substrate. For this we
make use of the contact model suggested by Vyasarayani et al. [25] (described in the
previous chapter). Lift-off is simulated by first making the beam pull-in by applying a
voltage beyond the pull-in voltage and letting it settle down to an equilibrium condition.
Then using this solution as the initial condition for displacements and setting the
actuation voltage to zero volts we can simulate the lift-off phenomenon.
3.4. Recoil force
The Recoil force is evaluated by assuming that the entire region of the beam intended for
contact is in contact with the transmission line (cantilever stopper of Fig. 2.1). This can
be achieved by prescribing the displacement at the nodes of the beam elements intended
for contact. The sum of the reaction force at these nodes gives the force with which the
switch will spring back i.e. the force that will be experienced by any bonds (if formed)
between the switch and the transmission line.
Fig.3.8. Pull-in time vs. voltage for the cantilever switch. The increase of actuation voltage by
1.2 V reduces the pull-in time substantially and further increase in actuation voltage has no
significant effect on the pull-in time.
As discussed in the previous chapter, linear width profile is optimum for
maximizing the recoil force. Now, in order to reduce pull-in voltage, we take the linear
profile shown in Fig. 3.9(a) and vary its slope in re-designing the switch. The slope is
taken as L
WW
2
12 − where L is the length of the tapering region, 2800 µm in Fig. 3.9(a).
Here, the contact element is of fixed size (600 µm×2000 µm). The thickness was taken as

50 µm and the gap was taken as 8 µm throughout. The w
based on the slope while some minimum and maximum values are obeyed. The actuation
electrode was kept at a distance of 1150 µm from the fixed end. The electrode length was
taken to be 1350 µm in all cases. The contact occurs
µm at the end of the beam.
39 values for the taper angle (slope) of the beam were taken and each case was
simulated using beam FE modeling for pull
(www.comsol.com) for computing the recoil force with 3D model. The entire length of
the contact pad is assumed to be in contact with the transmission line while evaluating the
recoil force. Figure 3.9b shows the computed values for the pull
force. The recoil force is non
profile has negative or positive slope.
Fig.3.9(a) Linearly tapering switch with dimensions similar to [
recoil force with taper angle of the beam with gaps
18
50 µm and the gap was taken as 8 µm throughout. The widths at either end get decided
based on the slope while some minimum and maximum values are obeyed. The actuation
electrode was kept at a distance of 1150 µm from the fixed end. The electrode length was
taken to be 1350 µm in all cases. The contact occurs at the contact element of length 600
µm at the end of the beam.
39 values for the taper angle (slope) of the beam were taken and each case was
simulated using beam FE modeling for pull-in voltage and recoil force and COMSOL
) for computing the recoil force with 3D model. The entire length of
the contact pad is assumed to be in contact with the transmission line while evaluating the
recoil force. Figure 3.9b shows the computed values for the pull-in voltage
force. The recoil force is non-monotonic because beams bend differently when the width
has negative or positive slope.
(a) Linearly tapering switch with dimensions similar to [8]. (b) Pull
per angle of the beam with gaps cg and ag both as 8 µm.
idths at either end get decided
based on the slope while some minimum and maximum values are obeyed. The actuation
electrode was kept at a distance of 1150 µm from the fixed end. The electrode length was
at the contact element of length 600
39 values for the taper angle (slope) of the beam were taken and each case was
in voltage and recoil force and COMSOL
) for computing the recoil force with 3D model. The entire length of
the contact pad is assumed to be in contact with the transmission line while evaluating the
in voltage and recoil
monotonic because beams bend differently when the width
]. (b) Pull-in voltage and
(b)
(a)

19
3.5. Contact resistance
After the switch pulls in, the hills of either surface come in contact as shown in Fig. 3.10.
The actual area that bears all the load, denoted by bA , is small compared to the apparent
area of contact. The contact resistance is dependent on bA . In [17], the expression for the
load bearing area is given as
Cb
FA
nH= (3.4a)
where, CF is the contact force, H is the hardness of the material and n is an empirical
index which usually lies between 0 and 1 (commonly 0.1 to 0.3 when contact pressures
are not too small). Thus, it can be said that the apparent area of contact has no effect on
the contact resistance. In fact, in [27], Bromley and Nelson have experimentally showed
that decrease of apparent contact area by many orders of magnitude only had a marginal
effect on the contact resistance. To estimate the load bearing area we make use of a
conservative value of 1n = and the hardness of SS304 is taken from [14] as 2800 MPa.
Again in [12], an expression for the contact resistance is obtained by assuming a circular
contact area. Now, if ρ is the resistivity of the material and the load bearing area is
considered to be a circle with radius, a , the contact resistance can be approximated by
2CR
a
ρ= (3.4b)
This expression is valid when the contacting materials are of the same type. In case of
different materials the contact resistance is given by [28]
1 2
4CR
a
ρ ρ+= (3.4c)
where 1ρ and 2ρ are the resistivities of the metals coming in contact. In our case, the
metals coming under contact are SS304 and Gold (see Section 3.1). Taking the values of
resistivities as 7.2 x 10-7
Ω-m and 2.33 x 10-8
Ω-m [36] for SS304 and gold respectively,
the contact force required for a contact resistance of 1 Ω evaluated from Eqn. (3.4a) and
(3.4c) is 300 µN.
Fig.3.10. Cantilever beam coming into with the contact pad. Inset shows the hills of the
contacting surfaces coming in contact which reduces the actual area of contact.

20
Chapter 4
Results and discussion
4.1. Lumped model
Equation (3.1) gives the governing equation for the dynamics of a lumped system without
damping. With damping Eqn. (3.1) changes to
2
0
2
0
)(2 zg
AVkzzczm
−=++
εɺɺɺ (4.1)
The lumped parameters are evaluated by performing modal analysis on the six designs.
Table 4.1 shows the values of the lumped parameters for the six designs. The damping
ratio obtained for the first mode in Section 3.3 was 3.204 which can be used to evaluate
the damping coefficient c given by kmζ2 for each design. Using these values for the
lumped parameters m , c and k ,Eqn. (4.1) can be solved using Runge-Kutta 4th
order
method [37]. The time response for the six designs is shown in Fig. 4.1.
TABLE 4.1
LUMPED PARAMETERS AND PERFORMANCE CHARACTERISTICS OF THE SIX DESIGNS
Design
No
K (N/m) m (1e-7 Kg) A (µm2) Static pull-in
voltage (V)
From Eqn.
(3.2)
Pull-in time
without
damping
(ms)
Pull-in time
with
damping
(ms)
1 2733.22 2.086 1987042 99.71 0.038 4.40
2 2384.24 2.972 2002200 92.78 0.048 5.42
3 2146.26 3.581 2012553 87.79 0.056 6.04
4 2021.25 3.883 2017580 85.10 0.060 6.43
5 1758.07 4.531 2027711 79.17 0.070 7.18
6 1348.95 5.535 2042869 69.09 0.088 8.44
It can be seen that the values of pull-in times are in the millisecond range and are
in agreement with pull-in times measured during experiments. Thus, lumping gives us a
reasonable model to predict the performance characteristics of the switch.
4.2. Beam model
The performance characteristics obtained from the simulation are given in Table 4.2. It
can be seen that the pull-in voltage gradually comes down as the slope of the beam
increases. The decrease can be attributed to the decrease in stiffness of the beam. The
dynamic pull-in voltage also observes the same trend and is 13-16% lower than the static
pull-in voltage. The decrease in dynamic pull-in voltage as compared to the static pull-in
voltage decreases as the slope is increased. This can be explained by the fact that the net
vibrating mass increases as the slope of the beam increases from negative to positive
value.

21
TABLE 4.2
RESULTS OF SIMULATION OF SIX OPTIMIZED AND RE-DESIGNED SWITCHES
Design
No
Pull-in voltage
(V)
3D model
Pull-in
voltage (V)
1D model
Dynamic pull-in
voltage (V) 1D
model
Pull-in
time (ms)
Lift-off
time (ms)
1 120.94 125.31 105.05 1.79 0.95
2 110.63 113.42 95.98 2.26 1.15
3 103.44 105.76 90.25 2.61 1.30
4 99.69 101.94 87.07 2.79 1.35
5 92.19 94.28 80.87 3.19 1.50
6 81.25 82.38 71.13 3.90 1.75
TABLE 4.3
CONTACT PARAMETERS EVALUATED AT 5V ABOVE THE STATIC PULL-IN VOLTAGE
Design No Actuation voltage (V) Contact force (µN) Contact resistance (Ω)
1 125.94 121.84 1.58
2 115.63 120.26 1.59
3 108.44 119.22 1.60
4 104.69 110.34 1.66
5 97.19 123.81 1.57
6 86.25 111.55 1.65
Fig. 4.1. Time response of the six designs. The sharp rise in the displacement indicates that pull-in has
occurred and the corresponding time is taken as the pull-in time.
There is a significant difference between the pull-in voltage obtained through
simulation and the pull-in voltage measured by experiments (compare Table 4.2 and
Table 3.2). We discuss a few possible reasons for this discrepancy in the next section.

22
RF-MEMS switches are usually operated a few volts above the pull-in voltage.
So, we operate the switches at 5 V above the pull-in voltage to obtain the contact
parameters and evaluate the resistance using equation (3.5a) & (3.5b). The values of
contact force, area and resistances obtained are shown in Table 4.3. It can be seen that the
contact resistance is higher than 1 Ω but below 5 Ω for all the six designs. A simple re-
design is suggested in the following section which addresses this problem.
The pull-in and lift-off times obtained are in the range of a few milliseconds
which itself is an improvement over the switch in [6]. But this switch has mm range
planar dimensions and micron range gaps, giving rise to significant damping forces.
Presence of holes in the structural element of the switch can significantly reduce the
effect of damping on the structure. The effect of holes is discussed in the next section by
making a parametric study of a couple of parameters.
4.3. Discussion
4.3.1. Pull-in voltage discrepancy
It can be seen that there is a considerable difference between the pull-in voltage evaluated
by simulation and experiment i.e. the values of pull-in voltage obtained from experiments
is lower than that obtained by simulation. As mentioned in Section 3.1, conical wire tips
are used to facilitate assembly. This conical shape of the alignments posts gives rise to
clearances that can in turn make the beam tilt about the edge of its resting surface
possible as shown in Fig. 4.2. Since conductive epoxy is used for assembly, this tilt is
likely to remain after curing.
TABLE 4.3
PULL-IN VOLTAGE WHEN ACTUATION GAP IS 3µm and 0.066o TILT IS PRESENT
Config No 3 µm gap 0.066 o
tilt
1 44.69 47.41
2 40.62 41.18
3 37.81 37.33
4 36.56 35.45
5 33.75 31.72
6 29.64 26.03
An initial study suggested that the pull-in voltages of the simulation agree within
8% of the experimental values of pull-in voltage when the gap between the actuation
electrode and the beam, ag , is reduced to 3 µm from 6 µm. The results of simulation with
reduced gap is shown in Table 4.3 and the comparison with experimental results and
simulation with 6 µm gap is given in Fig. 4.3(a) and (b). It can be geometrically verified
that a tilt of approximately 0.14o is sufficient to bring the mid-point of the part of the
switch above the actuation electrode to 3 µm. This makes the average gap between the
switch and the actuation electrode as 3 µm. To facilitate this rotation the required taper on

the alignment posts is just 0.14
techniques used.
Fig. 4.2. (a)The beam tilts about the edge of the resting surface (axis shown) by 0.14
sectional view depicting the beam tilting by
Fig. 4.3. Pull-in voltage for different configurations obtained from experiments and simulation by varying
the actuation gap.
Going further with the assumption that the cantilever tilts during assembly, we try
to vary the tilt of the beam from 0 to 0.14
shown in Fig. 4.4 for design 1
voltage of 47.41 V, which is within 2.5% of the value of pull
experiment. This tilt of 0.066
23
lignment posts is just 0.14o, which is within the tolerances of the fabrication
The beam tilts about the edge of the resting surface (axis shown) by 0.14o.
beam tilting by θ .
in voltage for different configurations obtained from experiments and simulation by varying
Going further with the assumption that the cantilever tilts during assembly, we try
t of the beam from 0 to 0.14o. This results in a decrease of pull
design 1. It can be seen that a tilt value of 0.066o
voltage of 47.41 V, which is within 2.5% of the value of pull-in voltage obtained
experiment. This tilt of 0.066o
when applied to all six designs results in pull
(a)
(b)
, which is within the tolerances of the fabrication
. (b) Exaggerated 2D
in voltage for different configurations obtained from experiments and simulation by varying
Going further with the assumption that the cantilever tilts during assembly, we try
. This results in a decrease of pull-in voltage as
results in pull-in
in voltage obtained by
results in pull-in voltages

(Table 4.3) which are within 3 to 12% of the pull
experiment. The large dimensions (mm range) of the switch make the pull
the switches extremely sensitive to the value of the tilt that might occur during assembly.
Fig. 4.4. Effect on pull-in voltage with some amount of initial tilt given to the beam which could occur
during the assembly process.
4.3.2. Improvement in contact
The contact resistance obtained is
desired value of 1 Ω was not achieved. Improved contact resistance calls for enhanced
contact force. Force analysis at static equilibrium of a switch under contact suggests that
higher the electrostatic force act
Thus, to increase the electrostatic force on the switch at equilibrium without altering the
geometry of the switch or increasing the operating voltage, we suggest an increase in
contact gap from 4 µm to 6
contact gap is increased to 6
CONTACT FORCE AND RES
Config No. Actuation voltage
1
2
3
4
5
6
24
) which are within 3 to 12% of the pull-in voltage values obtained by
experiment. The large dimensions (mm range) of the switch make the pull
the switches extremely sensitive to the value of the tilt that might occur during assembly.
in voltage with some amount of initial tilt given to the beam which could occur
Improvement in contact resistance
The contact resistance obtained is less than 5 Ω for all the six configurations but the
was not achieved. Improved contact resistance calls for enhanced
contact force. Force analysis at static equilibrium of a switch under contact suggests that
higher the electrostatic force acting on the beam, the higher will be the contact force.
Thus, to increase the electrostatic force on the switch at equilibrium without altering the
geometry of the switch or increasing the operating voltage, we suggest an increase in
o 6 µm. Table 4.4 shows the increase in contact force when the
contact gap is increased to 6 µm which leads to contact resistance values of below 1
TABLE 4.4
ONTACT FORCE AND RESISTANCE FOR CONTACT GAP OF 6 µm
Actuation voltage
(Volts)
Contact force (µN) Contact resistance
125.94 678.28
115.63 711.11
108.44 733.05
104.69 708.83
97.19 711.94
86.25 661.73
in voltage values obtained by
experiment. The large dimensions (mm range) of the switch make the pull-in voltage of
the switches extremely sensitive to the value of the tilt that might occur during assembly.
in voltage with some amount of initial tilt given to the beam which could occur
for all the six configurations but the
was not achieved. Improved contact resistance calls for enhanced
contact force. Force analysis at static equilibrium of a switch under contact suggests that
higher will be the contact force.
Thus, to increase the electrostatic force on the switch at equilibrium without altering the
geometry of the switch or increasing the operating voltage, we suggest an increase in
shows the increase in contact force when the
m which leads to contact resistance values of below 1 Ω.
Contact resistance
(Ω)
0.67
0.65
0.64
0.65
0.65
0.68

25
4.3.3. Improvement of the Pull-in time
The p-i-n diode and FET switches have switching times in the range of µs. In [18] it is
reported that many MEMS switches have switching times around 2-40 µs. Table 3.2
reveals that the six designs of the switches have pull-in times of a few ms. Thus, there is
need to improve the switching times. Increase in the actuation voltage is a very easy way
to bring down the pull-in time but beyond a few volts the increase of actuation voltage
has almost negligible effect on pull-in time. Moreover we are looking for a switch with
lower actuation voltages thus increasing the actuation voltage is not a good idea. Altering
the geometry of the switch will lead to non-optimal shape of the structural element thus
affecting the recoil force and the pull-in voltage. The Q-factor of the switch has a
significant effect on the switching time. As mentioned in Section 3.3, the Q-factor
obtained for the switches was 0.16 which is a very low value. It is mentioned in [2] that
the switching time decreases considerably for a change in quality factor from 0.2 to 2, but
beyond 2 the effect of increase in Q-factor on pull-in time becomes less predominant. A
very high value of Q-factor increases the settling time for the beam and thus a Q-factor of
1 is recommended. Thus, we aim to improve the Q-factor of the switch in order decrease
the switching time.
It is a common practice to include holes in MEMS structures for the purpose of
releasing of oxides (etch holes) during fabrication and also to decrease the effect of
damping. Eung-Sam Kim et al. in [15] have made a study of effect of holes in a structure
moving like a parallel-plate. The parameters they used for the study are the area ratio
(i.e., percentage area of holes to the area of the plate) and the number of holes. It was
found that increasing the number of holes was more effective than increasing the area
ratio of the holes. Including holes in the area above the actuation electrode will reduce the
electrostatic force acting on the switch we only include the holes in the area above the
contact pad. This would decrease the area available for contact but we know that the area
of contact is dependent only on the contact force and not the apparent area of contact
[27].
The air passing through the holes is modeled using FLUID 138 elements in
ANSYS which are usually used to model fluid flow behavior through short channels.
Another benefit of these elements is that they can be used in conjunction with FLUID
136 elements which we used to model the thin-film. As in [15] we make use of the same
parameters for our study. The area above the contact pad (600 µm ×1400 µm) is taken as
the base area. We vary the number of holes as 1, 4, 9 and 16 and take area ratios as 0.05,
0.1 and 0.25. Usually it is very difficult to get circular holes by etching but we make use
of circular holes to ease the process of node selection for applying the boundary
conditions and new element generation. If we use circular holes, then by selecting a local
coordinate system with origin at the center of the hole and coordinate system of polar
type, we can get the details of all the nodes on the circumference and it is easier to
operate

26
TABLE 4.5
Q-FACTOR FOR THE FIRST MODE
NO OF HOLES/AREA
RATIO
0.05 0.1 0.25
1 0.26 0.30 0.39
4 0.32 0.36 0.44
9 0.41 0.44 0.52
16 0.46 0.51 0.55
TABLE 4.6
PULL-IN TIME FOR THE SWITCH WITH AND WITHOUT HOLES
CONFIG NO WITHOUT HOLES WITH 16 HOLES
1 1.79 0.48
2 2.26 0.61
3 2.61 0.71
4 2.79 0.76
5 3.19 0.87
6 3.90 1.07
Table 4.5 shows that we are able to bring the Q-factor to a value of 0.55 when we
employ 16 holes with an area ratio of 0.25. This value of Q-factor corresponds to a
damping ratio value of 0.9 for the first bending mode. Applying Rayleigh damping with
1ζ and 5ζ as 0.9 and 0.017 respectively we obtain the pull-in times for all the six
configurations (see Table 4.6). Almost one order of magnitude reduction is visible by the
incorporation of holes into the structural element. As mentioned earlier in this section the
use of circular holes is to ease the process of node selection. Now if we replace all
circular holes with squares such that the sides of the squares are tangents to the circle we
get square holes. There will be a slight increase in the area ratio and region of the holes
will not overlap. Thus, giving a smaller value of damping ratio and hence pull-in time.
4.3.4. Recoil force
The geometry and the material of the structural element has a significant effect on the
recoil force. The recoil for the six designs is evaluated as mentioned in Section 3.4. It is
found that the recoil force ranges between 7 and 9 mN. As reported by Ozkeskin [9],
these values of recoil force are sufficient to overcome the problems of stiction and
adhesion. Since the designs are obtained by the method of optimization, any change in
the geometry of the switch will reduce the recoil force and thus, increase the chances of
failure by stiction or adhesion. In the next chapter we introduce a new design in which,
no changes are made to the structural element and still we get an increase in the recoil
force.

27
Chapter 5
Recoil force enhancement with nonlinear stiffness
5.1. Contact bumps
The recoil force of a structure has a positive correlation with the stiffness of the structure
undergoing deformation. Keeping this in mind we try to increase the stiffness of the
structure. But, a higher stiffness leads to a higher pull-in voltage. In order to avoid the
increase in pull-in voltage we reduce the effective length of the cantilever after pull-in
has occurred. Thus, increasing the stiffness and thereby the recoil force. This idea of
nonlinear stiffness is also mentioned in [12] where a cantilever which, when deflected,
lies against a solid guide and thus shortening its effective length and becoming stiffer.
Figure 5.1 shows the cantilever with the solid guide. Since it is difficult to obtain shapes
of solid guide shown in Fig. 5.1, we replace it with a contact bump placed at a suitable
distance from the fixed end.
Fig. 5.1. Cantilever with solid guide which exhibits nonlinear stiffness.
We make use of the system used in [8] where the beam length is taken as 3400
µm, thickness 50 µm, actuation gap 8 µm and contact gap 8 µm. In order to design the
contact bump we displace the point on the beam which is above the end of the actuation
electrode (denoted by tip in this Section) by a value δ . We evaluate the electrostatic
force, eF , occurring on the beam due to this deflection and also the elastic force, elF ,
which tries to oppose the electrostatic force. Figure 5.2 shows the values of eF , elF and
ele FF − for a voltage of 108.5 V which is the pull-in voltage for zero slope switch [8].
The pull-in condition is identified by the following conditions:
1. piele FF δδ => , i.e. electrostatic force is greater than the elastic force.
2. 0)(
>−
= pid
FFd eleδδ
δ.

28
Fig. 5.2. Electrostatic and elastic force acting on the beam for various values of displacements applied to
the tip of the beam. The applied voltage is 108.5 V which is the pull-in voltage for the beam with zero
slope.
Fig. 5.3. Minimum tip displacement required for different slopes of the beam when the pull-in voltage is
applied. A cubic curve fit for the scattered data occurring due to the approximate evaluation of the pull-in
voltage due to the bisection method.
It can be found out from Fig 5.2 that the preceding conditions are satisfied for
2.88δ ≥ i.e. 2.88pi mδ µ= . Figure 5.3 shows the values of api g/δ for varying slopes of
the beam when the pull-in voltage for the configuration is applied. We fit a cubic curve

29
to the resulting data. The scatter in the results is due to the fact that pull-in voltage is
evaluated using the bisection method and thus is not exact but only within a tolerance that
we have specified. It can be seen that for a slope of -28o the minimum tip displacement
required is ag44.0 . For all other configurations the minimum tip displacement required
for pull-in conditions to be satisfied is below ag44.0 . We make use of a value of 0.66a
g
tip displacement which is above ag44.0 and thus involves a factor of safety.
A minimum distance of 5 micro inches (127 µm) should be maintained between
any two components to be placed on the PCB. This comes as a limitation of the PCB
being used. The contact bump is placed at a distance of 1020 µm, i.e., as close as possible
to the start of the actuation electrode (starts at a distances of 1150 µm) so as to have
maximum decrease in the effective length of the beam and the gap between the beam and
the bump, cbg , is taken as the displacement that would occur if the point on the beam at
the end of the actuation electrode (the tip) is made to displace by 0.66a
g . Thus, the
contact bump comes in contact with the substrate once the part of the beam at the end of
actuation electrode deforms by 0.66a
g . As in [8], we apply the Dirichlet boundary
condition to the entire region intended for contact. The point above contact bump is
displaced by cbg . The Recoil force obtained for different slopes of the beam is shown in
Fig. 5.4. It can be seen that the Recoil force increases substantially due to the inclusion of
the bump.
Fig. 5.4. The increase in recoil force due to the inclusion of contact bump. At 0
o slope of the beam the
recoil force is more than double that of the configuration without the bump.

30
It can be easily verified from Fig. 5.4 that for a beam slope of 0o we get an
increase from 11.2 mN to 22 mN which is a 96% increase. Now, this improvement only
enhances the recoil force and the pull-in voltage remains the same. Thus, incorporation of
the contact bump in our existing six configurations will only increase the recoil force and
the pull-in voltage will remain the same. Thus, we reduce the thickness of the beam in the
region shown in Fig. 5.5.
5.2. Redesign of switches
The reduction in pull-in voltage due to the reduced thickness of the switch is shown in
Table 5.1. But this reduction of pull-in voltage comes with a decrease in recoil force that
can be overcome with the addition of the contact bump as shown in Fig. 5.5. The contact
bump is placed at distance of 370 µm, which again is the farthest possible from the fixed
end thus giving the maximum reduction in the effective length. The gap between the
beam and the contact bump, cbg , is taken as the displacement that would occur at
distance of 370 µm along the beam when the tip is displaced by 0.66a
g . As discussed in
Section 4.3.2, the contact gap, c
g , is kept as 6 µm instead of 4 µm in order keep the
contact resistance below 1 Ω.
TABLE 5.1
PULL-IN VOLTAGES FOR EXISTING SWITCH AND THE SWITCH WITH REDUCED THICKNESS IN THE REGION
SHOWN IN FIG. 5.5
CONFIG NO. EXISTING SWITCH [8] REDUCED THICKNESS PERCENTAGE
DECREASE
1 125.31 110.13 13.78
2 113.42 99.34 14.17
3 105.76 92.38 14.49
4 101.94 88.90 14.66
5 94.28 81.93 15.08
6 82.38 71.08 15.90
Fig. 5.5. The side view of the beam with the region where the thickness is to be reduced. All other
dimensions are the same as in [8].
Thickness to be reduced from 50 µm to 44 µm
cg ag
Contact bump
Tip cbg
130 µm

31
TABLE 5.2
RECOIL FORCE FOR EXISTING SWITCH, THE MODIFIED SWITCH WITH REDUCED THICKNESS AND MODIFIED
SWITCH WITH CONTACT BUMP IN mN
CONFIG NO. EXISTING
SWITCH
MODIFIED
SWITCH
(REDUCED
THICKNESS)
MODIFIED
SWITCH WITH
CONTACT BUMP
PERCENTAGE
INCREASE
1 8.51 7.40 14.29 67.92
2 8.55 7.42 14.64 71.23
3 8.47 7.34 14.72 73.79
4 8.40 7.27 14.71 75.12
5 8.18 7.08 14.59 78.36
6 7.67 6.63 14.16 84.62
Table 5.2 shows the recoil force for the existing switch, the modified switch with
reduced thickness, and the modified switch with the reduced thickness and the contact
bump. As expected, due to the reduction in stiffness, the recoil force drops when the
thickness is reduced. It can be seen from Table 5.1 and 5.2 that for configuration 6, there
is a 16% decrease in pull-in voltage and an 84% increase in recoil force when we reduce
thickness and include the contact bump. The thickness can further be reduced from 44 µm
to reduce the pull-in voltage and still have similar recoil force but the manufacturing
feasibility needs to be checked. In fact the thickness can be reduced to as low as 40 µm
and still have a 56.45% (7.67 to 12 mN) increase in recoil force and 25.5% (82.38 V to
61.38V) decrease in pull-in voltage for configuration 6. Further decrease in thickness
needs to be checked for manufacturing feasibility.
TABLE 5.3
RECOIL FORCE COMPARISON FOR EXISTING SWITCH WITH INCREASED CONTACT GAP AND THE MODIFIED
SWITCH
CONFIG NO EXISTING SWITCH MODIFIED SWITCH PERCENTAGE INCREASE
1 12.76 14.29 11.99
2 12.82 14.64 14.20
3 12.70 14.72 15.91
4 12.59 14.71 16.84
5 12.28 14.59 18.91
6 11.51 14.16 23.02
It can be argued that the increase in recoil force is not solely due to the inclusion
of contact bump but also due to the increase in contact gap, c
g , to 6 µm from 4 µm
which facilitates more deformation and thus more recoil force. So, we evaluate the recoil
force for the existing six configurations again with 6c
g mµ= . We can see that there is an
increase 12 – 23% (see Table 5.3) from configuration 1 to 6. Thus, we can claim that the
inclusion of the contact bump gives substantial increase in the recoil force.
The minimum limit of 127 µm distance between the components on the PCB
prevents further decrease in effective length of the cantilever. This limitation can be
overcome by making the contact bump a part of the beam rather than being a separate

32
component attached to the PCB. Figure 5.6 shows the idea of having the contact bump as
a part of the beam.
Fig. 5.6. Switch with contact bump attached to the beam placed at 10 µm distance from the actuation
electrode.
The benefits of having the contact bump on the beam itself are multiple. First, as
mentioned, is the increase in recoil force due to further reduction in the effective length.
Second is the fact the required gap between the bump and the PCB will be more as
farther the location of the bump more will be the deformation before the beam pulls-in.
cg ag
Contact bump Tip cbg
PCB

33
Chapter 6
Summary and Conclusions
Stiction and adhesion are two problems that limit the performance of a micromachined
switch. Using special materials that reduce adhesion and modifying the contacting
surface to eliminate stiction are usually followed. In this work, we provided a new
mechanical design-based approach to solve the problem by incorporating a contact bump
that reduces the effective length of the switch after pull-in has occurred. The new
approach improves the recoil force, the force with which the switch goes out of contact
upon turning off the activation voltage. Increase in stiffness due to the contact bump gave
us the option of reducing the stiffness of the switch by reducing the thickness of the beam
which in turn reduced the pull-in voltage. Contact resistances were evaluated to be of the
value of a few Ω, which is not desired for reliable operation of the switch as the number
of switching cycles increases. A simple redesign of increasing the contact gap was
suggested which brings the contact resistance below 1 Ω. Normal mode summation
method along with the modal projection method was used to obtain the time response of
the switches. The pull-in time of the switch was found to be a few ms, which is a
significant improvement over the previous switches reported by Ozkeskin [6]. The effect
of inclusion of holes to reduce the switching time was discussed. It was found that
increasing the number of holes as well as the area ratio reduced the squeezed-film effect.
Also discussed is that even a minor error in manual assembly may cause substantial
difference in the performance of the switch. This was a result of analyzing the reason for
discrepancy between the simulated and experimental values of the pull-in voltage of the
previous switch. Tilting that occurs during assembly is argued as the reason for
discrepancy and this led a guideline for more accurate assembly.

34
Appendix
A1. Modal projection method in Ansys and input files
Modal projection techniques provide an efficient method for computing damping
parameters for flexible bodies. The Modal Projection Technique is the process of
calculating the squeeze stiffness and damping coefficients of the fluid using the
eigenvectors of the structure. In the modal projection method, the velocity profiles are
determined from the mode-frequency response of the structure.
The basic steps in performing the analysis are as follows:
1. Build a structural and thin-film fluid model and mesh.
2. Perform a modal analysis on the structure.
3. Extract the desired mode eigenvectors.
4. Select the desired modes for damping parameter calculations.
5. Perform a harmonic analysis on the thin-film elements.
6. Compute the modal squeeze stiffness and damping parameters.
7. Compute modal damping ratio and squeeze stiffness coefficient.
8. Display the results.
Steps 4-7 have been automated using the DMPEXT command macro. Step 8 is available
through the MDPLOT command macro.
Fig. A2.1 Pressure distribution for the beam mentioned in Section 3. For the first mode.
Input file for Beam without holes
/batch,list

35
/PREP7
/title, Damping Ratio calculations for a Beam
/com uMKS units
ET, 1,136,1 ! 4-node option, High Knudsen Number
ET,2,45 ! Structural element
s_l=1450 ! Half Plate length (um)
s_w=700 ! Plate width
s_t=50 ! Plate thickness
d_el=6 ! Gap
pamb=.1013 ! ambient pressure (MPa)
visc=1.83e-11 ! viscosity kg/(um)(s)
pref=.1013 ! Reference pressure (MPa)
mfp=64e-3 ! mean free path (um)
Knud=mfp/d_el ! Knudsen number
mp,visc,1,visc ! Dynamic viscosity gap
mp,ex,2,193e3 ! SS304
mp,dens,2,8000e-18
mp,nuxy,2,.29
r,1,d_el,,,pamb ! Real constants - gap
rmore,pref,mfp
! Build the model
rectng,-s_l,s_l,-s_w,s_w ! Plate domain
TYPE, 1
MAT, 1
smrtsize,4
AMESH, all ! Mesh plate domain
esize,,1
type,2
mat,2
real,2
vext,all,,,,,s_t ! Extrude structural domain
nsel,s,loc,x,s_l
nsel,a,loc,y,s_w
nsel,a,loc,y,-s_w
nsel,r,loc,z,-1e-9,1e-9
d,all,pres ! Fix pressure at outer plate boundary
nsel,all
esel,s,type,,1
nsle,s,1
! nsel,u,cp,,1,5
cm,FLUN,node
allsel
nsel,s,loc,x,-s_l
d,all,ux
d,all,uy
d,all,uz
allsel
nsel,s,loc,y,-s_w
nsel,a,loc,y,s_w
d,all,uy
allsel
/solu
antype,modal ! Modal analysis
modopt,lanb,7 ! Extract lowest seven eigenmodes
eqslv,sparse
mxpand,7 ! Expand lowest two eigenmodes

36
solve
fini
/post1
RMFLVEC ! Extract eigenvectors
fini
/solu
DMPEXT,1,1,,'EIG' ! Extract damping ratios for 1st mode
Finish
Input file for Beam with holes
/batch,list
/PREP7
/title, Damping Ratio calculations for a Perforated Beam
/com uMKS units
ET, 1,136,1 ! 4-node option, High Knudsen Number
ET,2,45 ! Structural element
ET, 3,138,1 ! Circular hole option, Hugh Knudsen Number
s_l=1450 ! Half Plate length (um)
s_w=700 ! Plate width
s_t=50 ! Plate thickness
nholes = 4 !Number of holes
Ar=.25 !Area ratio
Ah = Ar*1400*600/nholes !Area of each hole
pi=acos(-1)
c_r= sqrt(Ah/pi) ! Hole radius
d_el=6 ! Gap
pamb=.1013 ! ambient pressure (MPa)
visc=1.83e-11 ! viscosity kg/(um)(s)
pref=.1013 ! Reference pressure (MPa)
mfp=64e-3 ! mean free path (um)
Knud=mfp/d_el ! Knudsen number
mp,visc,1,visc ! Dynamic viscosity gap
mp,visc,3,visc ! Dynamic viscosity holes
mp,ex,2,193e3 ! Stainless steel SS304
mp,dens,2,8000e-18
mp,nuxy,2,.29
r,1,d_el,,,pamb ! Real constants - gap
rmore,pref,mfp
r,3,c_r,,,pamb ! Real constants - hole
rmore,pref,mfp
! Build the model
rectng,-s_l,s_l,-s_w,s_w ! Plate domain
*do,i,1,sqrt(nholes)
*do,j,1,sqrt(nholes)
cyl4, 640+150+(i-1)*300,-700+(j-1)*700+350,c_r
*enddo
*enddo
ASBA, 1, all
TYPE, 1
MAT, 1
smrtsize,2
AMESH, all ! Mesh plate domain
! Begin Hole generation
*do,i,1,2
*do,j,1,2

37
nsel,all
*GET, numb, node, , num, max ! Create nodes for link elements
N, numb+1,640+150+(i-1)*300,-700+(j-1)*700+350
N, numb+2,640+150+(i-1)*300,-700+(j-1)*700+350, s_t
TYPE,3
MAT, 3
REAL,3
NSEL, all
E, numb+1, numb+2 ! Define 2-D link element
ESEL, s, type,,1
NSLE,s,1
local,11,1,640+150+(i-1)*300,-700+(j-1)*700+350
csys,11
NSEL,r, loc, x, c_r ! Select all nodes on the hole circumference
NSEL,a, node, ,numb+1
*GET, next, node, , num, min
CP, (2*i-2)+j, pres, numb+1, next
nsel,u,node, ,numb+1
nsel,u,node, ,next
CP, (2*i-2)+j, pres,all !Coupled DOF set for constant pressure
csys,0
*enddo
*enddo
! End hole generation
esize,,1
type,2
mat,2
real,2
vext,all,,,,,s_t ! Extrude structural domain
nsel,s,loc,x,s_l
nsel,a,loc,y,s_w
nsel,a,loc,y,-s_w
nsel,r,loc,z,-1e-9,1e-9
d,all,pres ! Fix pressure at outer plate boundary
nsel,all
esel,s,type,,3
nsle,s,1
nsel,r,loc,z,s_t
d,all,pres,0 ! P=0 at top of plate
dlist,all
esel,s,type,,1
nsle,s,1
nsel,u,cp,,1,4
cm,FLUN,node
allsel
nsel,s,loc,x,-s_l
d,all,ux
d,all,uy
d,all,uz
allsel
nsel,s,loc,y,-s_w
nsel,a,loc,y,s_w
d,all,uy
allsel
fini
/solu

38
antype,modal ! Modal analysis
modopt,lanb,7 ! Extract lowest seven eigenmodes
eqslv,sparse
mxpand,2 ! Expand lowest seven eigenmodes
solve
fini
/post1
RMFLVEC ! Extract eigenvectors
fini
/solu
DMPEXT,1,1,,'EIG' ! Extract damping ratio for 1st mode
Finish

39
A2. Matlab codes
P1. Finds out the pull-in voltage for the six configurations using bisection method.
clf % Clear graphics window
clear all % Clear all variables
clc % Clear command window
hold off % No hold on the graphics window
% This script needs the following scripts to run
% matcut.m, veccut.m, thickness.dat
% veccut.m
% Enter data
length_taper=2900;
length_in = 3400; % in micron units
load thickness.dat
Y_in = 193E3/(1-.29^2); % Young's modulus of 155 GPa
% Initial gap in microns
g0 = 6; % Actuation gap
Cg0 = 4;% Contact gap
%----------------------------------------------------------------
----------
%---------------------Configuration details----------------------
----------
W1=[2231.34 1769.29 1462.58 1308.43 1000.53 538.48]; % Width at
fixed end
W2=[572.14 1041.69 1353.78 1510.39 1823.33 2292.88]; % Width at
free end
theta=(W2./2-W1./2);
theta=(1/length_in)*theta*180/pi; % Taper angle
V_PI=zeros(1,size(theta,2));
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% READ INPUT from files
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
nodenos = 290*2+1; % Number of nodes
node(:,1) = [1:1:nodenos]';
node(:,2) = [0:length_taper/(nodenos-1):length_taper]';
node(:,3) = zeros(nodenos,1);
elem(:,1) = [1:1:nodenos-1]';
elem(:,2) = [1:1:nodenos-1]';
elem(:,3) = [2:1:nodenos]';
elem(:,4) = Y_in*ones(nodenos-1,1);
% Read in displacement boundary condition data from the file
disp.dat
load dispbc.dat
load thickness.dat
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% PRE-PROCESSING
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
NNODE = size(node,1); % Number of nodes

40
% Nodal coordinates
nx = node(:,2);
ny = node(:,3);
NELEM = size(elem,1); % Number of elements
ncon = elem(:,[2 3]); % Nodal connectivity
E = elem(:,4);
t = thickness;
for i =1 : NELEM
if nx(ncon(i,2)) <= 500
t(i) = 44;
elseif nx(ncon(i,2)) <= 1950
t(i) = 44;
elseif nx(ncon(i,2)) <= 2080
t(i) = 50;
elseif nx(ncon(i,2)) <= 2700
t(i)= 46;
else
t(i) = 50;
end
end
% Applying Boundary conditions
Nfix = size(dispbc,1);
j = 0;
for i = 1:Nfix,
j = j + 1;
dispID(j) = (dispbc(i,2)-1)*3+dispbc(i,3);
end
[dispID sortIndex] = sort(dispID);
dispVal=[0 0 0];
% Compute the lengths of the elements
for ie=1:NELEM,
eye = ncon(ie,1);
jay = ncon(ie,2);
L(ie) = sqrt ( (nx(jay) - nx(eye))^2 + (ny(jay) - ny(eye))^2
);
end
% Initialization
max_iter = 50;
V=60;
for configNo=1:6
configNo
w1=W1(configNo);
w2=W2(configNo);
for i=1:NELEM
b1=w1+(w2-w1)/length_in*length_in/340*(50+i-1);
b2=w1+(w2-w1)/length_in*length_in/340*(50+i);
width(i,1)=(b1+b2)/2;
end
A = width.*t; %cross-section area of the beam
Inertia= width.*t.^3/12; %Area moment of inertia of the beam
% Arrange force information into a force vector, F
F = zeros(3*NNODE,1); % Initialization

41
U = zeros(3*NNODE,1);
U_prev = U;
flag=10;
V_inc=20;
while (flag~=0)
if flag==1
V=V+V_inc;
elseif flag==2
V=V-V_inc;
end
delta_U = 100.0; % Initialized to a large value
fV = 8.854e-12 * V^2/2*1E6; % Force per unit area per
fV2 = 8.854e-12 * 0^2/2*1E6;
for relax_iteration = 1:max_iter,
F = zeros(3*NNODE,1); % Initialization to zero.
if abs(delta_U) < 1e-6,
flag =1;
break;
end
% Computation of electrostatic forces on nodes
for i = 101:390
gi = g0 - U( 3*(i-1) + 2);
gj = g0 - U( 3*i + 2 );
gave = (gi+gj)/2;
eforce = fV * width(i) * L(i) / gave^2;
eforce = eforce * (1 + 0.65*gave/width(i));
F( 3*(i-1) + 2 ) = F( 3*(i-1) + 2 ) + eforce/2;
F( 3*i + 2 ) = F( 3*i + 2 ) + eforce/2;
end
for i = 417:540
gi = Cg0 - U( 3*(i-1) + 2);
gj = Cg0 - U( 3*i + 2 );
gave = (gi+gj)/2;
eforce = fV2 * width(i) * L(i) / gave^2;
eforce = eforce * (1 + 0.65*gave/width(i));
F( 3*(i-1) + 2 ) = F( 3*(i-1) + 2 ) + eforce/2;
F( 3*i + 2 ) = F( 3*i + 2 ) + eforce/2;
end
%
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% SOLUTION
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Call fembeam.m to solve for the following.
% Deflections: U
[U,R] =
fembeam(A,L,E,nx,ny,ncon,NELEM,NNODE,F,dispID,dispVal,Inertia
);
delta_U = max( abs(U(2:3:3*NNODE)) ) - max(…
abs(U_prev(2:3:3*NNODE)) );
U_prev = U;
end

42
% Bisection method
if relax_iteration==max_iter
V_inc=V_inc/2;
flag=2;
if V_inc<=1e-4
flag=0;
end
end
end
V_PI(configNo)=V;
end
plot(theta,V_PI);
P2. Evaluates the pull-in time for the six configurations clear all
hold off
clc
W1=[2231 1769 1463 1308 1000 538];
W2=[572 1042 1354 1510 1823 2293];
VDC_all=[125.31;113.42;105.76;101.94;94.28;82.38]; % Static pull-
in voltages
for configNo=1:6
VDC=VDC_all(configNo,:);
pullin_time=zeros(1,size(VDC,2));
for volt_index=1:size(VDC,2)
global GK GM GK1 GC evec1 L B ic voltage v_time FM Flag
freq H...
vdc vac omega gap e_force_elems e_force_contact_elems
force_bump_elem ncnt...
kc NInd nu Contactgap NNODE NELEM
sigma_r=-0;% residual stress
NELEM = 290*2; % Number of elements
w1=W1(configNo);
w2=W2(configNo);
B=zeros(NELEM,1);
length_tot=3400;
length=length_tot-500;
% Width profile of switch
for i=1:NELEM
b1=w1+(w2-w1)/length_tot*((length_tot-
length)/(length/NELEM)…
+i-1)*length/NELEM;
b2=w1+(w2-w1)/length_tot*((length_tot-…
length)/(length/NELEM)+i)*length/NELEM;
B(i)=(b1+b2)/2;
end
nu=.8;% Deformation dependent damping
NInd=3;
kc=4.7e11; %Contact stiffness
load thickness.dat;
H = thickness; % Thicknesses of beam elements in microns

43
E = 193e3/(1-.29^2); % Units: microN/micron^2
rho = 8000e-18; % Units: microKg/micron^3
vdc =VDC(volt_index);
vac = 0.0;
omega = 1e6*2*pi;
gap = 6;
Contactgap=4;
bumpNode=51;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
NNODE = NELEM + 1;
nx = [0:length/NELEM:length];
ny = zeros(size(nx));
% Nodal connectivity
for ielem=1:NELEM,
ncnt(ielem,1) = ielem;
ncnt(ielem,2) = ielem+1;
end
% Thickness of the beam
for i =1 : NELEM
if nx(ncnt(i,2)) <= 500
H(i) = 50;
elseif nx(ncnt(i,2)) <= 1950
H(i) = 44;
elseif nx(ncnt(i,2)) <= 2080
H(i) = 50;
elseif nx(ncnt(i,2)) <= 2700
H(i)= 46;
else
H(i) = 50;
end
end
e_force_elems =[]; % Elements on which electrostatic
force is applied
e_force_contact_elems=[];% Elements on which contact
force is applied
for i = 1:NELEM
if H(i) == 44
e_force_elems = [e_force_elems i];
elseif H(i) == 46
e_force_contact_elems =[e_force_contact_elems i];
end
end
force_bump_elem=bumpNode-1;
% Displacement boundary condition specification
dispID = [1 2 ];
dispVal = [0 0];
% Lengths of elements
for ie=1:NELEM,
eye = ncnt(ie,1);
jay = ncnt(ie,2);

44
L(ie) = sqrt ( (nx(jay) - nx(eye))^2 + (ny(jay) -
ny(eye))^2 );
end
% Call the fem m-file
% K = stiffness matrix
% M = inertia (mass) matrix
[K,
M]=fem2(B,H,L,E,rho,nx,ny,ncnt,NELEM,NNODE,dispVal,dispID,0);
% Compute mode shapes and natural frquencies
% evec = eigenvector matrix
% eval = diagonal matrix containing the eigenvalues
D = inv(K)*M;
[evec eval] = eig(D);
% Take only first few modes for simulation
FM = 5; % Number of modes considered
% Normalize mode shapes so that the maximum transverse
% displacement is unity.
sz = size(evec,2);
evec1=zeros(sz,FM);
for i=1:FM
evec1(:,i)= evec(:,i) / max(abs(evec(1:2:sz,i)));
end
% Generalized inertia matrix
GM = evec1'*M*evec1;
% Generalized stiffness matrix
GK = evec1'*K*evec1;
GK1=evec'*K*evec;
freq = sqrt(diag(GK)./diag(GM));
% Damping matrix by Rayleigh damping
dc1 = 3.204;
dc2 = .14e-2;
w1 = freq(1);
w2 = freq(FM);
alpha = 2*w1*w2*(dc1*w2-w1*dc2)/(w2^2-w1^2);
beta = 2*(dc2*w2-dc1*w1)/(w2^2-w1^2);
C=alpha*M+beta*K;
GC=evec1'*C*evec1;
T0 = 0.0;
Tfinal = Ncycles * 2*pi/freq(1);
Tfinal = 10e-3;
Tspan = [T0:Tfinal/100: Tfinal];
options = odeset('RelTol',1e-4,'AbsTol',[1e-4 1e-4 1e-
5]);
Y0 = zeros(1,2*FM);
ic = 0; % Index used to keep track of voltage as a
function of time
tic;
[T, Y] = ode45('stfew',Tspan, Y0);
toc;
% Take FM modes
idvec = 1:2:2*FM;
x_soln = Y(:,idvec);

45
x_soln = evec1(:,1:FM)*x_soln';
figure(8)
tip=2*(ncnt(e_force_contact_elems(size(e_force_contact_el
ems,2)),…
2))+1;
plot(T, x_soln(tip,:),'Linewidth',2.5);
xlabel('Time (sec)');
ylabel('Displacement of end of Contact part (\mum)')
title('Time response')
x_dot = evec1(:,1:FM)*Y(:,2:2:2*FM)';
figure(5)
[XEnd TEnd]=size(x_soln);
for i=1:TEnd
plot(-x_soln(1:2:XEnd,i));
axis([0 NELEM+1 -gap 2]);
F(i)=getframe;
end
end
grid on
pullin_time(volt_index)=T(size(T,1));
end
figure(configNo)
plot(VDC,[pullin_time]*1e3,':','Linewidth',2);hold on;
plot(VDC,pullin_time*1e3,'.r');
xlabel('Voltage (Volts)','fontsize',12);
ylabel('Pull-in time (milli-seconds)','fontsize',12);
title('Pull-in time variation with voltage','fontsize',12);
grid on
P3. Lumped system dynamics
global V_in e A g_0 k b m R;
K=[2733.22 2384.24 2146.26 2021.25 1758.07 1348.95] ; %Lumped
stiffness
M=[2.086234 2.971885 3.520828 3.882725 4.530887 5.534692]*1e-7;%
Lumped mass
Ar=[1987042 2002200 2012553 2017580 2027711 2042869]*1e-12;% Area
of… actuation
styl =['-:-:-:']
for configNo = 1:6;
k =K(configNo);
m = M(configNo);
b=2*3.204*sqrt(k*m); % Damping coefficent obtained from
damping ratio = 3.204
A =Ar(configNo);
g_0=6e-6; % Actuation gap
e=8.854e-12;
V_pullin=sqrt(8*k*g_0^3/27/e/A) % Static pull-in voltage
obtained from… formula
[~,a]=size(V);

46
for i=1:a
V_in=V(i);
[T,Y]=ode45(@dynamicpullin,[0 25e-3],[0 0]);
plot(T*1e3,[Y(:,1)]*1e6,[styl(configNo)
'k'],'Linewidth',3);
hold on
end
grid on
end
xlabel('Time (seconds)','fontsize',12)
ylabel('z (\mum)','fontsize',12)
function dy=dynamicpullin(t,y)
global V_in e A g_0 k b m R;
dy=zeros(2,1);
dy(1)=y(2);
dy(2)=(V_in^2*e*A/2/(g_0-y(1))^2-k*y(1)-b*y(2))/m;
P4. Recoil force evaluation
clear all % Clear all variables
clc % Clear command window
hold off % No hold on the graphics window
%----------------------------------------------------------------
----------
%---------------------Configuration details----------------------
----------
length_taper=2900;
disp =[];
length_in = 3400; % in micron units
W1=[2231.34 1769.29 1462.58 1308.43 1000.53 538.48];
W2=[572.14 1041.69 1353.78 1510.39 1823.33 2292.88];
theta=(W2./2-W1./2);
theta=(1/length_in)*theta*180/pi;
Y_in = 193E3/(1-.29^2); % Young's modulus of 155 GPa
% Initial gap in microns
g0 = 6;
gc = 4;
load thickness.dat
%---------------------Configuration details----------------------
RecoilForce=zeros(1,size(theta,2));
RecoilForceWithBump=zeros(1,size(theta,2));
nodenos = 291; % Number of nodes (do not change this!)
node(:,1) = [1:1:nodenos]';
node(:,2) = [0:length_in/(nodenos-1):length_in]';
node(:,3) = zeros(nodenos,1);
elem(:,1) = [1:1:nodenos-1]';
elem(:,2) = [1:1:nodenos-1]';
elem(:,3) = [2:1:nodenos]';
elem(:,4) = Y_in*ones(nodenos-1,1);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%

47
% PRE-PROCESSING
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Identify the number of nodes, X and Y Coordinates of the nodes
NNODE = size(node,1);
nx = node(:,2);
ny = node(:,3);
% Identify the number of elements and form an element
connectivity array,
% the cross-section and Young's modulus arrays.
NELEM = size(elem,1);
ncon = elem(:,[2 3]);
E = elem(:,4);
t = thickness;
% Compute the lengths of the elements
for ie=1:NELEM,
eye = ncon(ie,1);
jay = ncon(ie,2);
L(ie) = sqrt ( (nx(jay) - nx(eye))^2 + (ny(jay) - ny(eye))^2
);
end
for i =1 : NELEM
if nx(ncon(i,2)) <= 500
t(i) = 40;
elseif nx(ncon(i,2)) <= 1950
t(i) = 40;
elseif nx(ncon(i,2)) <= 2080
t(i) = 50;
elseif nx(ncon(i,2)) <= 2700
t(i)= 46;
else
t(i) = 50;
end
end
for configNo=1:size(theta,2)
Nfix = size(dispbc,1);
j = 0;
for i = 1:Nfix,
j = j + 1;
dispID(j) = (dispbc(i,2)-1)*3+dispbc(i,3);
end
fixNode=291-20-1-60;
for i=1:61
j=j+1;
dispID(j)= (fixNode-1)*3+2;
fixNode=fixNode+1;
end
[dispID sortIndex] = sort(dispID);
dispVal=[0 0 0 g0*ones(1,61)];
Nfix = size(dispbc,1);
j = 0;
for i = 1:Nfix,
j = j + 1;

48
dispID1(j) = (dispbc(i,2)-1)*3+dispbc(i,3);
end
dispID1(j+1)=3*(195-1)+ 2;
dispVal1=[0 0 0 g0*.66];
Nfix = size(dispbc,1);
j = 0;
for i = 1:Nfix,
j = j + 1;
dispID2(j) = (dispbc(i,2)-1)*3+dispbc(i,3);
end
dispVal2=[0 0 0];
w1 = W1(configNo);
w2 = W2(configNo);
for i=1:NELEM
b1=w1+(w2-w1)/340*(50+i-1);
b2=w1+(w2-w1)/340*(50+i);
width(i,1)=(b1+b2)/2;
end
A = width.*t; %cross-section area of the beam
Inertia= width.*t.^3/12; %Area moment of inertia of the beam
F = zeros(3*NNODE,1); % Initialization
[U,R] =
fembeam(A,L,E,nx,ny,ncon,NELEM,NNODE,F,dispID,dispVal,Inertia);
RecoilForce(configNo)=sum(R(4:size(R,2)));
[U,R] =
fembeam(A,L,E,nx,ny,ncon,NELEM,NNODE,F,dispID1,dispVal1,Inertia);
dispID2(4)=(3*(38-1)+2);
dispVal2(4)=U(3*(38-1)+2);
disp = [disp U(3*(38-1)+2)];
fixNode=291-60-20-1;
j=size(dispID2,2);
for i=1:61
j=j+1;
dispID2(j)= (fixNode-1)*3+2;
fixNode=fixNode+1;
end
dispVal2=[dispVal2 g0*ones(1,61)];
[U,R] =
fembeam(A,L,E,nx,ny,ncon,NELEM,NNODE,F,dispID2,dispVal2,Inertia);
RecoilForceWithBump(configNo)=sum(R(5:size(R,2)));
clear dispID dispID1 dispID2 dispVal dispVal1 dispVal2
end
plot(1:6,RecoilForce*1e-3,'s-k',1:6,RecoilForceWithBump*1e-3,'o-
k','Linewidth',2.5);
legend('Without Bump','With Bump','Location','Northwest');
xlabel('Taper angle (Degrees)');ylabel('Recoil force (mN)')
grid on

49
Abstract— The focus of this paper is on analysis, optimization,
re-design, fabrication, and testing of an existing contact type
Radio Frequency Micro-Electro-Mechanical Systems (RF-
MEMS) switch that has high power-handling (250W) capability.
Improved performance characteristics in terms of higher recoil
force and lower actuation voltage are obtained while ensuring
moderate contact force and small switching times. In order to
fulfill the high power-handling capabilities, the switch is
assembled on the Printed Circuit Board (PCB) and is made of
stainless steel. The Recoil force is evaluated using finite element
(FE) beam model as well as 3D FE modeling while the other
performance characteristics such as pull-in voltage, pull-in time,
and contact force are evaluated using a combination of the FE
model, relaxation scheme, and bisection method. Structural
optimization of the switch, in the framework of calculus of
variations, gave a nearly linear tapering profile of the beam,
which would maximize the recoil force. It was noted that there is
significant decrease in pull-in voltage because of the optimum
profile without any compromise in recoil force. Six switches with
optimized width profile were fabricated and tested for pull-in
voltage and pull-in time, the simulated and measured
characteristics are compared, and reasons for discrepancies were
analyzed pointing to improvements in modeling and fabrication.
Index Terms— EDM, optimization, photochemical etching,
pull-in voltage, recoil force, RF-switch, and stainless steel
I. INTRODUCTION
icromachined radio-frequency (RF) switches, known as
RF MEMS (microelectromechanical systems) switches,
have received much attention from academia and industry ever
since the MEMS field came into research focus [1] & [2]. The
importance of RF MEMS switches is underscored by the fact
that they can be co-located with digitally controllable circuit
elements with a small footprint on the chip. Among different
types of actuation used, electrostatic actuation is the most
common because of its low power consumption. While linear
behavior, low power consumption, low insertion loss, high
isolation, and low manufacturing cost are benefits of
electrostatic micromechanical switches, there is room for
improvement in power handling capacity, switching times,
reliability, and actuation voltages as compared to purely
electronic switches [3] & [4]. Switches made of silicon have
power handling capacity of tens of W and beyond this they
tend to fail by stiction or adhesion. Also environmental factors
require silicon switches to be packaged, which proves to be
expensive. Keeping these reasons in mind, metals are used as
the structural element in micro-switches [5]. Steel was
assembled on a printed circuit board (PCB) [6] and the switch
was shown to have up to 250 W of dissipative power capacity
and occupied a small footprint of 6 mm2. Here, the actuation
voltage under cold-switching condition was over 300 V,
actuation voltage required for the functioning (hot-switching
conditions) of this switch was 130 V, and the actuation time
was in ms range.
Increasing actuation (i.e., switching) voltage reduces the
switching time. But it also increases the contact force that may
cause increased adhesion and wear [7]. Therefore, Pt-Rh was
used on the contact pads in [4] and [6]. Although it helped, the
problem remains that Pt-Rh is expensive and makes fabrication
and assembly difficult. In this paper, we address the adhesion
problem with a mechanical approach. That is, we increase the
recoil or spring-back force of the switch so that the switch can
spring back upon turning off the actuation voltage by breaking
any unwanted fused connections formed due to stiction or
adhesion. Thus, we not only reduce the actuation voltage but
also alleviate problems associated with adhesion and wear.
II. PROBLEM STATEMENT AND THE SCOPE OF WORK
The model of the RF-switch considered is depicted in Fig. 1.
This switch, also called a relay switch, closes the RF
transmission line upon actuation. The actuating electrode at the
bottom is located away from the contact pad so that the beam
of the switch does not contact the actuation electrode. Figure 2
shows a solid model of an RF switch [6] in which four micro
rods serve as fins to dissipate heat while handling high power.
The performance of the switch is improved but the fabrication
becomes complex.
In order to re-design the switch we consider modifying the
mechanical element of the switch without increasing the
complexity or cost of fabrication. For re-designing the
mechanical element, we use the width profile of the beam as
the design variable and the recoil force as the objective
function. A constraint on the volume is applied so that the size
of the switch remains small and within 6 mm2 area. The
designed switch should be amenable for micro electro
discharge machining (µEDM) and PCB assembly as was the
case with switched reported in [4],[6] & [8].
An Optimized Steel Micro-switch for
Low Switching Voltage and High Recoil Force
Subhajit Banerjee, Gaurav Nair, Fatih M. Ozkeskin, Yogesh Gianchandani, and
G. K. Ananthasuresh
M
A3. Manuscript in preparation for possible submission to a journal

50
Fig. 1. Schematic of a resistive switch assembled onto a printed circuit board
(PCB). The contact pad closes the RF transmission lines. The actuation and
contact gaps are exaggerated to show the arrangement of various elements
clearly
Fig. 2. Solid model of the steel switch with RF transmission lines and
electrodes on a PCB [6].
III. ANALYSIS
A. Pull-in voltage
By referring to Fig. 3 that depicts a simplified version of the
switch, we write Euler-Bernoulli beam equation that governs
its static deformation as
( )
22 2
0
2 2 2
0 for
1 0.65 for2
0 for
a
x d
bd d w wEI d x d l
bdx dx g w
d l x L
ε φ
<
= + ≤ ≤ +
− + < ≤
ɶ (1)
where ( )w x is the transverse displacement of the beam,
( )2
/ 1E E ν= −ɶ the biaxial modulus with E indicating the
Young’s modulus and ν the Poisson’s ratio, I the area
moment of inertia, 0
ε the permittivity of free space, b the
width of the beam, a
g the gap beneath the beam, d the
distance from the fixed end of the cantilever beam to the start
of the actuation electrode, ϕ the applied electric potential
between the beam and the actuation electrode, and L the total
length of the beam. The term on the right hand side is the
transverse electrostatic force per unit length of the beam that
deflects the beam [9]. Parallel-plate approximation with
fringing field approximation [10] is used for modeling the
electrostatic force acting on the beam.
Equation (1) cannot be solved analytically because of the
nonlinear force term. Finite element modeling is used to
discretize Eq. (1) and then solved iteratively starting with the
initial zero deformation. It is a standard method to solve this
equation to find the pull-in voltage at which the beam would
snap down catastrophically because a stable solution ceases to
exist. There is a small difference here because the beam is
shown to be slightly thicker at the free end with contact gap
equal toc a
g g< . Hence, the contact gap can be closed before
the portion of the beam above the actuating electrode actually
touches and shorts with the electrode.
Fig. 3. Simplified model of the switch for beam FE analysis.
The pull-in voltage calculated by solving Eq. (1) is shown in
Fig. 4 as a function of a
g and for different values ofc
g . It can
be seen that varying c
g makes little difference because the
overhanging part of the beam beyond actuating electrode
simply moves down with zero curvature until contact happens.
To validate the results of the beam analysis, 3D finite element
modeling was used to solve the coupled problems of
electrostatics and elastostatics in the CoventorWare software
(www.cowentorware.com). Three instances of this are shown
in Fig. 4 to confirm that beam modeling is reasonable. We use
beam modeling here because it helps in design and
optimization as shown in the next section. In addition to
estimating the pull-in (and hence actuation) voltage, we also
need contact and recoil forces. Contact force is the force felt
by the contacting portion of the beam with the actuation
voltage present. The recoil force, as noted earlier, is defined as
the force with which the beam would spring back up after the
actuation voltage is set to zero. This is shown in Figs. 5a-b.
These two forces can be estimated using 3D FE modeling as
well as beam modeling; of course, the latter would make
simplifying assumptions to get an analytical formula to be used
in design optimization.
Fig. 4. Comparison of pull-in voltage for different gaps in beam FE code and
Coventorware’s CoSolve.
B. Contact resistance
The reliability of contact type RF-MEMS switches depends
on the contact force and contact resistance at the interface of
materials. The contact resistance is a result of the surface
roughness at the interface. Very low value of surface area of
contact implies very high value of contact resistance. In [11], it
is mentioned that RF-MEMS switches tend to fail when
x
d
l
L
φ

51
contact resistance is about 5-10 Ω. In general, contact
resistance below 1 Ω is required for reliable operation of the
switch.
Fig. 5. Simplified models for computing (a) the contact force, and (b) recoil
force. Contact force is the reaction force experienced by the beam when it is
pulled down with an actuation voltage. Recoil force is the force with which
the beam springs back up upon turning off the actuation voltage.
After the switch pulls in, the hills of either surface come in
contact as shown in Fig. 6. The actual area that bears all the
load, denoted by b
A , is small compared to the apparent area of
contact. The contact resistance is dependent on b
A . In [12],
the expression for the load bearing area is given as
C
b
FA
nH= (2a)
where, C
F is the contact force, H is the hardness of the
material and n is an empirical index which usually lies
between 0 and 1 (commonly 0.1 to 0.3 when contact pressures
are not too small). Thus, it can be said that the apparent area of
contact has no effect on the contact resistance. In fact, in [13],
Bromley and Nelson have experimentally showed that
decrease of apparent contact area by many orders of magnitude
only had a marginal effect on the contact resistance. To
estimate the load bearing area we make use of a conservative
value of 1n = and the hardness of SS304 is taken from [14] as
2800 MPa. Again in [12], an expression for the contact
resistance is obtained by assuming a circular contact area.
Now, if ρ is the resistivity of the material and the load bearing
area is considered to be a circle with radius, a , the contact
resistance can be approximated by
2C
Ra
ρ= (2b)
Fig. 6. Cantilever beam coming into with the contact pad. Inset shows the
hills of the contacting surfaces coming in contact which reduces the actual
area of contact.
This expression is valid when the contacting materials are of
the same type. In case of different materials the contact
resistance is given by [15]
1 2
4C
Ra
ρ ρ+= (2c)
where 1
ρ and 2
ρ are the resistivities of the metals coming in
contact. In our case, the metals coming under contact are
SS304 and Gold (see Section V). Taking the values of
resistivities as 7.2 x 10-7
Ω-m and 2.33 x 10-8
Ω-m for SS304
and Gold respectively, the contact force required for a contact
resistance of 1 Ω evaluated from Eqn. (2a) and (2c) is 300 µN.
C. Pull-in time
Fast switching is a desirable feature for RF-MEMS switches.
For power-handling requirements of 20-50 mW the switching
time for most of the RF-MEMS switches in existence is around
2-40 µs [16]. But here, we aim for switching times in the range
of few ms. It is mentioned in [2] that the switching time
decreases considerably for a change in quality factor, Q , from
0.2 to 2, but beyond 2 the effect of increase in Q-factor on
pull-in time becomes less predominant.
The beam is modeled using beam elements [17] and solved
using the modal summation method. It is mentioned in [18]
that to capture the dynamics of a beam in flight at least five
modes are required but if contact occurs we need to take at
least ten modes to ensure accurate results [19].
To estimate the damping, we use the modal projection
method [20] to evaluate the damping coefficient, ς . The
structural element is modeled in ANSYS (www.ansys.com) as
a cantilever with length 2900 µm,1400 µm width and 50 µm
thickness (similar to configuration 3 mentioned in section V)
using SOLID45 elements with properties of SS304. The fluid
film thickness is assumed to be 6 µm and the fluid is modeled
using FLUID136 elements with properties of air. The beam is
assumed to be open at three sides that are not fixed and closed
at the side that is fixed. We obtain the damping coefficient for
the first mode, 1
ς , as 3.204 and the fifth mode, 5
ς , as 0.0014.
This value of 1
ς corresponds to a Q-factor value of 0.16 at
resonance which is a very conservative value for this design.
This value of Q-factor can be easily improved to a higher
value by introduction of holes in the beam that reduces the
effect of squeeze film damping. Proportional damping is
applied in the form of Rayleigh damping. The damping matrix,
C , is evaluated as M Kα β+ , where M and K are mass and
stiffness matrices and α and β are constants and obtained by
fixing the damping ratio, ς , equal to 3.201 for the first and
0.0014 for the fifth [21]. The electrostatic force applied is the
same as in Eqn 1. The dynamic response is given by
eMw Cw Kw F+ + =ɺɺ ɺ (3)
where, e
F is the electrostatic force on the beam given by the
right hand side of Eqn (1). Equation (3) is solved using
ODE45 solver of Matlab (www.mathworks.com). As the input
voltage is increased, it is observed that the switch first closes
when the voltage is 110.8 V. This is taken as the dynamic pull-

52
in voltage. Increasing the voltage beyond this value results in
decrease of the pull-in time as shown in Fig. 7.
Fig. 7. Pull-in time vs. voltage for the cantilever switch.
IV. OPTIMIZATION AND RE-DESIGN
A. Optimum profile for the width of the beam
As discussed in Section 1, maximizing the recoil force
alleviates the problems associated with stiction and adhesion
in switches. While it is possible to pose this as a general
structural optimization problem to maximize the recoil force
and minimizing the actuation voltage, here we follow a simpler
approach. We vary only the width profile of the beam as it
does not warrant in changes in prototyping used to make the
switch shown in Fig. 2 by Ozkeskin and Gianchandani [4] &
[8]. We consider only the elastic behavior rather than coupled
behavior involving mechanical and electrostatic domains. With
these simplifications, we pose the optimization problem in the
framework of calculus of variations.
( )2
0
recoil
1
0
2 max
0
3 2
max
1Minimize
Subject to
: 0
: 0
Data: /12, , , / (1 ) , , , ( ), ( )
L
b
L
l u
L
l u
L xdx
b
F E
M mdx
b E
t b dx V
t t E E L V M x m x
α
α
α ν
−
=∆
Λ ∆ − ≤
Λ − ≤
= ∆ = −
∫
∫
∫
ɶ
ɶ
ɶ
(5)
where the expression for was obtained by computing the
reaction force for an applied displacement of the tip using
Clayperon’s energy theorem [22], i.e., half the work done by
the external force is equal to the strain energy of an elastic
body at static equilibrium.
( )
( )
22
recoil
0
recoil recoil 2
0
1
2 2
L
L
F L xdx
b EF F
E L xdx
b
α
α
−
∆∆ = ⇒ =
−
∫
∫
ɶ
ɶ (6)
The width ( )b x is the optimization variable. 1
Λ is the estimate
for the Lagrange multiplier corresponding to the deflection
constraint. Here, l
M is the bending moment in the beam for the
electrostatic load for the applied potential, φ . u
m is the
bending moment due to an unit load applied at the tip. The
expression for the deflection of the tip indicated in the first
inequality constraint can be obtained by using the unit dummy
load theorem from mechanics [22]. The second inequality
constraint restricts the volume of the material used. This is to
prevent the problem from becoming unbounded and to achieve
economy of material and keeping the size of the switch small.
maxV is the maximum amount of material allowed.
2Λ is the
estimate of the Lagrange multiplier associated with the second
constraint. The rest of the symbols were defined earlier or in
Eq. (5).
By writing the Lagrangian for the constrained minimization
problem posed in Eq. (5) and then writing the Euler-Lagrange
necessary conditions, including the complementarity
conditions, for this problem, we get
( )2
1 2 max
0 0 0
1L L L
l uL x M m
L dx dx t b dx VbE b Eα α
−= + Λ ∆ − + Λ −
∆ ∫ ∫ ∫ɶ ɶ
(7)
( )2
1 22 20l u
L x M mt
E b E bα α
−− + Λ + Λ =
∆ɶ ɶ (8a)
1 1
0
0, 0
L
l uM m
dxAEα
Λ ∆ − = Λ ≥
∫ (8b)
2 max 2
0
0, 0
L
t b dx V
Λ − = Λ ≥ ∫ (8c)
Four possibilities exist now depending on at least one, both, or
none of the constraints are active.
1 20, 0Λ > Λ = (9a)
1 20, 0Λ = Λ = (9b)
1 20, 0Λ = Λ > (9c)
1 20, 0Λ > Λ > (9d)
Let us first treat the two cases where the volume constraint
(i.e., the second constraint) is inactive. In the first case (Eq.
(9a)), 1
Λ , which is a constant, turns out to be a function of x
by virtue of Eq. (8a). Hence, it is not valid. The second case
(Eq. (9b)) is also invalid because it implies that ( )b x should
be infinite. Hence, we conclude that the volume constraint
must be active making the third and fourth cases valid. As per
Eq. (8a), the third case (Eq. (9b)) gives
( )
2
L xb
t Eα
−=
Λ ∆ɶ (10)
where 2
Λ can be computed using Eq. 5(c).

53
( )
( )
max
0 2
20
2
max max2
L
L
L xt dx V
t E
L xt dx
t E tL
V t E V
α
α
α
− = Λ ∆
− ∆ ⇒ Λ = =
∆
∫
∫
ɶ
ɶ
ɶ
(11)
By substituting for 2Λ from Eq. (11) into Eq. (10) gives
( )( )max
2
2
2L x Vb L x
tLt Eα
−= = −
Λ ∆ɶ (12)
Note that it shows that optimum width profile of the beam is
linear. The fourth case (Eq. (9d)) with Eq. (8a) gives
( )2
1
2
1l u
L xb M m
t Eα
− = − Λ ∆Λ ɶ
(13)
The constants 1
Λ and 2
Λ can be evaluated using the two
active constraints. Although it looks formidable and highly
nonlinear, it was found that this is also close to linear as shown
in Figs. 7a-b for some chosen data. While it is possible that it
may be substantially far from a linear width profile for some
other data, we choose to take the linear profile as the optimum
because: (i) manufacturing is simple and robust against
inaccuracies and (ii) keeping the actuation voltage low and
contact force moderate can be better done with the linear width
profile. The linear profile gives one parameter, i.e., the slope,
to vary to meet other performance criteria as discussed next.
B. Re-design of the switch
As discussed in the preceding sub-section, linear width
profile is optimum for maximizing the recoil force. Now, in
order to meet other criteria (reduce pull-in voltage without
compromising on recoil force), we take the linear profile
shown in Fig. 9 and vary its slope in re-designing the switch.
Here, the contact element is of fixed size. The thickness was
taken as 50 µm and the gap was taken as 8 µm throughout. The
widths at either end get decided based on the slope while some
minimum and maximum values are obeyed. The actuation
electrode was kept at a distance of 1150 µm from the fixed
end. The electrode length was taken to be 1350 µm in all
cases. The contact occurs at the contact element of length 600
µm at the end of the beam.
39 values for the taper angle of the beam were taken and
each case was simulated using beam FE modeling for pull-in
voltage and COMSOL (www.comsol.com) for computing the
recoil force. The entire length of the contact pad is assumed to
be in contact with the substrate while evaluating the recoil
force. Figure 9 shows the computed values for the pull-in
voltage and recoil force. The recoil force is non-monotonic
because beams bend differently when the width profile has
negative or positive slope.
Fig. 8. Optimum width profiles (a) as per Eq. (12), (b) as per Eq. (13).
Fig. 9. Optimum width profiles (a) as per Eq. (10), (b) as per Eq. (11).
Fig. 10. Pull-in voltage and recoil force with taper angle of the beam with
gaps c
g and a
g both as 8 µm.
Figure 10 is instructive because it shows how pull-in (and
hence actuation voltage) can be decreased substantially
without compromising much on the recoil force. As shown in
Fig. 9, as we move from the current design (i.e., the design
reported in [6] and shown in Fig. 2) of negative slope of about
-20° to positive slope of about 8°, we get substantial (almost
45%) reduction in pull-in voltage whereas the recoil force
stays the same. Another re-design was decreasing the
actuation gap to 6 µm and the contact gap to 4 µm as it was
felt that this change can be handled in machining the steel foil
and in assembly. The final configuration is shown in Fig. 9.
The details for six design variants are shown in Table 1. The
pull-in voltages of these configurations were estimated using
the CoSolve module of CoventorWare. Details of how these

54
designs were arrived at are not presented here due to paucity
of space and interested readers may refer to [23]. All six
designs were fabricated and tested.
Highlights of fabrication and testing of the six design
variants presented in the preceding section are briefly noted in
the next section. Details can be found in [3].
V. FABRICATION AND TESTING
A. Fabrication
The cantilever beam of the switch was photochemically
etched from 50µm-thick SS304 foils (Kemac Technology Inc.,
CA). The recesses of 6 µm and 4 µm were machined using
micro-electrodischarge machining (µEDM). Perforations of
300 µm diameter were located for the alignment and the
attachment on the PCB (Fig. 10a). A 600 µm-thick Rogers
4003 was used as the substrate (Advanced Circuits Inc., CO).
Metal interconnect traces of 70 µm - thick Cu provided bias
electrodes and the contact pad. In such PCBs, 4-µm thick Ni
was used as an adhesion layer on the Cu base, and 0.25-µm thick
outer gold layer provided an electrical contact. Through vias
were located on the PCB for the subsequent attachment of the
cantilever.
Fig. 11. Dimensions of re-designed shapes which were fabricated.
TABLE 1
DATA FOR THE SIX OPTIMIZED AND RE-DESIGNED SWITCHES
Design No. Slope (°) 1
W (in µm) 2
W (in µm)
1 -13.7 2231 572
2 -6.1 1769 1042
3 -0.9 1463 1354
4 1.7 1308 1510
5 6.9 1000 1823
6 14.5 538 2293
1l = 500,
2l = 500,
3l = 1430,
4l = 130,
5l = 600,
6l = 200, and L = 3400
(all values are in µm).
For the assembly, alignment posts (1000 µm-height; 300 µm-
diameter), were machined from gold wire using µEDM, and
tightly fitted into the isolated-vias on the PCB (Fig. 10a).
Conical wire tips facilitated the insertion of the cantilever. The
cantilever was assembled over the posts (Fig. 10b) and fixed by
applying conductive epoxy (Creative Materials). The flatness of
the cantilever was maintained during the assembly process with
the help of a high resolution laser displacement sensor (Keyence
LK-G32).
B. Testing
The test circuit (see Figs. 11a-b) used the variable gate
actuation voltage (VG) and constant drain voltage (VD) as inputs.
Output voltage VOUT was monitored to detect the pull-in
condition. VG was increased in steps of 50 mV from 30 V to 45
V. When the test structure was in the off-state, VOUT was equal
to zero (denoted as VOUT–OFF). When a pull-in occurred, VOUT
was approximately VD/2 = 1 V due to the relationship given in
Fig. 11b (denoted as VOUT–ON). RON denotes the on-state
resistance and includes the contact resistance and the
parasitics. The test was run in air ambient atmosphere of air.
Pull-in occurred at 40.95 V. Further increase in actuation
voltage caused VOUT to remain constant at approximately 1 V
since RON was negligibly low compared to fixed resistors.
Fig. 12. Scanning Electron Microscopes (SEM) micrographs for Design 2 in
Table 1. (a) Cantilever is shown upside down with recessed regions. (b)
Assembled structure with 6 µm gap between the cantilever and the ground
electrode shown in the inset.
The six designs presented in the previous subsection were
also assembled tested. The results are shown in Fig. 12 and
Table 2. The notable thing is that the actuation voltage is
brought down to less than 82 V from the original value that
was more than 100 V.

55
Fig. 13. (a) Circuitry for testing, using variable gate actuation voltage (VG),
and constant drain voltage VD as the input. RON was the on-state resistance
that contact resistance and all the parasitic resistances. (b) Actuation concept
showing VOUT–OFF and VOUT–ON conditions.
C. Results
The performance characteristics obtained from the
simulation are given in table 2. It can be seen that the pull-in
voltage continuously comes down as the slope of the beam
increases. The decrease can be attributed to the decrease in
stiffness of the beam. The dynamic pull-in voltage also
observes the same trend and is 13-16% lower than the static
pull-in voltage. The decrease in dynamic pull-in voltage as
compared to the static pull-in voltage decreases as the slope is
increased. This can be explained by the fact that the net
vibrating mass increases as the slope of the beam increases
from negative to positive value.
TABLE 2
RESULTS OF SIMULATION OF SIX OPTIMIZED AND RE-DESIGNED SWITCHES
Config
No
Pull-in voltage
(V)
3D model
Pull-in
voltage (V)
1D model
Dynamic pull-
in voltage (V)
1D model
Pull-in
time (ms)
1 120.94 125.31 105.05 2.21
2 110.63 113.42 95.98 2.80
3 103.44 105.76 90.25 3.24
4 99.69 101.94 87.07 3.46
5 92.19 94.28 80.87 3.95
6 81.25 82.38 71.13 4.83
TABLE 3
CONTACT PARAMETERS EVALUATED AT 5V ABOVE THE STATIC PULL-IN
VOLTAGE
Config
No
Actuation voltage
(V)
Contact force
(µN)
Contact resistance
(Ω)
1 125.94 121.84 1.58
2 115.63 120.26 1.59
3 108.44 119.22 1.60
4 104.69 110.34 1.66
5 97.19 123.81 1.57
6 86.25 111.55 1.65
TABLE 4
RESULTS OF EXPERIMENTS OF SIX OPTIMIZED AND RE-DESIGNED SWITCHES
Config No Pull-in voltage (V) Pull-in time (ms)
1 46.25 4-5
2 40.95 4-6
3 35.75 5-6
4 34.1 5-7
5 32.8 5-8
6 28.15 6-8
RF-MEMS switches are usually operated a few volts above
the pull-in voltage. So, we operate the switches at 5 V above
the pull-in voltage to obtain the contact parameters and
evaluate the resistance using equation (2a) & (2b). The values
of contact force, area and resistances obtained are shown in
Table 3. It can be seen that the contact resistance is higher than
1 Ω but below 5 Ω for all the six configurations. A simple re-
design is suggested in the following subsection which
addresses this problem.
D. Discussion
It can be seen that there is a considerable difference between
the pull-in voltage evaluated by simulation and experiment i.e.
the values of pull-in voltage obtained from experiments is
lower than that obtained by simulation. As mentioned in
section V, conical wire tips are used to facilitate assembly.
This conical shape of the alignments posts gives rise to
clearances that can in turn make the beam tilt about the edge of
its resting surface possible as shown in Fig. 14. Since
conductive epoxy is used for assembly, this tilt may be
maintained after curing.
TABLE 5
PULL-IN VOLTAGE WHEN ACTUATION GAP IS 3µm and 0.066o TILT IS PRESENT
Config No 3 µm gap 0.066 o
tilt
1 44.69 47.41
2 40.62 41.18
3 37.81 37.33
4 36.56 35.45
5 33.75 31.72
6 29.64 26.03
An initial study suggested that the pull-in voltages of the
simulation agree within 8% of the experimental values of pull-
in voltage when the gap between the actuation electrode and
the beam, a
g , is reduced to 3 µm from 6 µm. The results of
simulation with reduced gap is shown in table 5 and the
comparison with experimental results and simulation with 6
µm gap is given in Fig. 13. It can be geometrically verified
that a tilt of approximately 0.14o is sufficient to bring the mid-
point of the part of the beam above the actuation electrode to 3
µm. Thus, making the average gap between the beam and the

56
actuation electrode as 3 µm. To facilitate this rotation the
required taper on the alignment posts is just 0.14o, which is
within the tolerances of the fabrication techniques used.
Fig. 14. Pull-in voltage for different configurations obtained from
experiments and simulation by varying the actuation gap.
Fig. 15(a). The beam tilts about the edge of the resting surface (axis shown)
by 0.14o. (b&c) Zoomed view of the top of the beam touching conical
alignment post.
Going further with the assumption that the cantilever tilts
during assembly, we try to vary the tilt of the beam from 0 to
0.14o. This results in a decrease of pull-in voltage as shown in
Fig. 16 for configuration 1. It can be seen that a tilt value of
0.066o results in pull-in voltage of 47.41 V, which is within
2.5% of the value of pull-in voltage obtained by experiment.
This tilt of 0.066o
when applied to all the six configurations
results in pull-in voltages (Table 5) which are within 3 to 12%
of the pull-in voltage values obtained by experiment. The large
dimensions (mm range) of the switch make the pull-in voltage
of the switches extremely sensitive to the value of the tilt that
might occur during assembly.
TABLE 6
CONTACT FORCE AND RESISTANCE FOR CONTACT GAP OF 6 µm
Config No. Actuation
voltage
(Volts)
Contact force
(µN)
Contact resistance
(Ω)
1 125.94 678.28 0.67
2 115.63 711.11 0.65
3 108.44 733.05 0.64
4 104.69 708.83 0.65
5 97.19 711.94 0.65
6 86.25 661.73 0.68
The contact resistance obtained is below 5 Ω for all the six
configurations but the desired value of 1 Ω was not achieved.
Improved contact resistance calls for enhanced contact force.
Force analysis at static equilibrium of a switch under contact
suggests that higher the electrostatic force acting on the beam,
higher will be the contact force. Thus, to increase the
electrostatic force on the switch at equilibrium without altering
the geometry of the switch or increasing the operating voltage,
we suggest an increase in contact gap from 4 µm to 6 µm.
Table 6 shows the increase in contact force when the contact
gap is increased to 6 µm which leads to contact resistance
values of below 1 Ω.
Fig. 16. Effect on pull-in voltage with some amount of initial tilt given to the
beam which could occur during the assembly process.
VI. CLOSURE
Stiction and adhesion are two problems that limit the
performance of a micromachined switch. Using special
materials that reduce adhesion and modifying the contacting
surface to eliminate stiction are usually followed. In this work,
we provided a mechanical approach to solve the problem by
designing the width profile of the beam of an electrostatically
actuated steel switch. The width profile of the beam was
optimized using structural optimization approach by posing a
calculus of variations problem to maximize the recoil force. It
was found that linearly tapering width is optimum and is
practical in view of meeting other performance criteria. By
varying the slope of the beam profile, it was shown that the
actuation voltage can be reduced substantially without
changing the recoil force much. The pull-in time of the switch
was found to be a few ms. Six design variants are finalized.
These had actuation voltage between 82 and 121 V. This is
considerably lower than the pull-in voltage in cold-switching
conditions for the switch in [6], which is more than 300 V and
will be reduced only to 150 V even with a reduced actuation
gap of 6 µm. All six designs were fabricated using
photochemical etching and micro-EDM and assembled onto a
PCB. Also discussed in the paper is that even a minor error in
manual assembly may cause substantial difference in the

57
performance of the switch and a simple re-design to improve
the contact resistance.
REFERENCES
[1] Goldsmith, C. L., Lin, T. H., Powers, B., Wu, W. R.,
and Norvell, B., “Micromechanical membrane switches
for microwave applications,” IEEE MTT-S Intl.
Microwave Theory and Techniques Symp. Proc.,
pp.91–94, 1995.
[2] Rebeiz, G. M., RF MEMS: Theory, Design and
Technology, Wiley, Hoboken, NJ, 2003.
[3] Ozkeskin, F. M., and Gianchandani, Y. B., “A Hybrid
Technology for Pt-Rh and SS316L High Power Micro-
relays,” Proc. Solid-State Sensors, Actuators, and
Microsystems Workshop, Hilton Head Island, South
Carolina, June 6-10, 2010.
[4] Ozkeskin, F.M., “Bulk foil Pt-Rh micro-relays for high
power RF and other applications,” Ph.D dissertation,
University of Michigan, Ann Arbor, USA.
[5] Zavracky, P. M., Majumder, S., and McGruer, N. E.,
“Micromechanical Switches Fabricated using Nickel
Surface Micromachining,” IEEE/ASME J.
Micromechanical Systems, 6(1:3), 1997, pp. 3-9.
[6] F. M. Ozkeskin, S. Choi, K. Sarabandi, and Y. B.
Gianchandani, “Metal Foil RF Micro-Relay with
Integrated Heat Sink for High Power Applications,”
Proc. 24th
IEEE International Conference on Micro
Electro Mechanical Systems (MEMS’11), pp. 776–779,
2011.
[7] Shalaby, M. M., Wang, Z., Chow, L. L.-W., Jensen, B.
D., Vokakis, J. L., Kurbayashi, K., and Saitou, K.,
“Robust Design of RF-MEMS Cantilever Switches
using Contact Physics Modeling, IEEE Transactions on
Industrial Electronics, 56 (4), 2009, pp. 1012-1021.
[8] Ozkeskin, F. M., and Gianchandani, Y. B., “Double-
cantilever Micro-relay with Integrated Heat Sink for
High Power Applications,” Proceedings of Power
MEMS 2010, held in Leuven, Belgium, Nov. 30-Dec. 3,
2010, pp. 159-162.
[9] Ananthasuresh, G. K., Vinoy, K. J., Gopalakrishnan, S.,
Bhat, K. N., and Aatre, V. K., Micro and Smart
Systems: Technology and Applications, New York:
John-Wiley, 2011.
[10] Gupta, R. K., “Electrostatic pull-in test structure design
for in-situ mechanical property measurements of
microelectromechanical systems (MEMS,” PhD Thesis,
Massachusetts Institute of Technology, 1997.
[11] Jensen, B. D., “Multi-physics modeling and
experimental investigation of low-force MEMS switch
contact behavior,” PhD Thesis, University of Michigan,
Ann Arbor, MI, USA, 2004.
[12] Holm, R., Electric Contacts, Berlin: Springer-Verlag,
1967.
[13] Bromley, S. C., and Nelson, B. J., “Performance of
microcontacts tested with a novel MEMS device,” Proc.
47th
IEEE Holm Conf. Electrical Contacts, pp. 122-127,
2001.
[14] Kumaraswamy, A., and Sridhar Babu, B., “A Novel
method of evaluating flow curve for SS304 from low
cost indentation experiments,” ARPN Journal of
Engineering and Applied Sciences, vol. 5, no. 12, pp.
38-42, Dec. 2010.
[15] Slade, P. G. (editor), Electrical Contacts: Principles
and Applications, New York: Marcel Dekker, 1999, pp.
2-3.
[16] Rebeiz, G. M. and Muldavin, J. B., “RF MEMS
switches and switch circuits,” IEEE microwave
magazine, 2001.
[17] Thomson, W. T., and Dahleh, M. D., Theory of
Vibration with Applications, New Delhi: Pearson
education, 2007, ch. 10.
[18] Younis, M. I., Abdel-Rahman, E. M., and Nayfeh, A.,
“A reduced-order model for electrically actuated
microbeam-based MEMS,” J. Microelectromechanical
Systems, vol. 12, no. 5, pp. 672-680, Oct. 2003.
[19] Vyasarayani, C. P., Abdel-Rahman, E. M., McPhee, J.,
and Birkett, S., “Modeling MEMS resonators past pull-
in,” J. Computational and Nonlinear Dynamics, vol. 6,
July 2011.
[20] Pandey, A. K., and Pratap, R., “Effect of flexural modes
on squeeze film damping in MEMS cantilever
resonators,” J. Micromechanics and Microengineering,
vol. 17, pp. 2475-2484, Nov. 2007.
[21] Cook, R. D., Malkus, D. S., Pleasha, M. E., and Witt,
R. J., Concepts and Applications of Finite Element
Analysis, New Delhi: Wiley India, 2009, pp. 389-390.
[22] Y. C. Fung, Foundations of Solid Mechanics, Prentice-
Hall, 1988.
[23] Banerjee, S., “Design and simulation of an RF-MEMS
switch,” Master of Engineering Report, Department of
Mechanical Engineering, Indian Institute of Science,
Bangalore, India, June 2011.

58
Bibliography
[1] Goldsmith, C. L., Lin, T. H., Powers, B., Wu, W. R., and Norvell, B.,
“Micromechanical membrane switches for microwave applications,” IEEE MTT-S
Intl. Microwave Theory and Techniques Symp. Proc., pp.91–94, 1995.
[2] Rebeiz, G. M., RF MEMS: Theory, Design and Technology, Wiley, Hoboken, NJ,
2003.
[3] Ozkeskin, F. M., and Gianchandani, Y. B., “A Hybrid Technology for Pt-Rh and
SS316L High Power Micro-relays,” Proc. Solid-State Sensors, Actuators, and
Microsystems Workshop, Hilton Head Island, South Carolina, June 6-10, 2010.
[4] Ozkeskin, F. M., and Gianchandani, Y. B., “Double-cantilever Micro-relay with
Integrated Heat Sink for High Power Applications,” Proceedings of Power MEMS
2010, held in Leuven, Belgium, Nov. 30-Dec. 3, 2010, pp. 159-162.
[5] Zavracky, P. M., Majumder, S., and McGruer, N. E., “Micromechanical Switches
Fabricated using Nickel Surface Micromachining,” IEEE/ASME J.
Micromechanical Systems, 6(1:3), 1997, pp. 3-9.
[6] Ozkeskin, F. M., Choi, S., Sarabandi, S., and Gianchandani, Y. B., “Metal Foil RF
Micro-Relay with Integrated Heat Sink for High Power Applications,” Proc. 24th
IEEE International Conference on Micro Electro Mechanical Systems (MEMS’11),
pp. 776–779, 2011.
[7] Shalaby, M. M., Wang, Z., Chow, L. L.-W., Jensen, B. D., Vokakis, J. L.,
Kurbayashi, K., and Saitou, K., “Robust Design of RF-MEMS Cantilever Switches
using Contact Physics Modeling, IEEE Transactions on Industrial Electronics, 56
(4), 2009, pp. 1012-1021.
[8] Banerjee, S., Ozkeskin, F. M., Gianchandani, Y., and Ananthasuresh, G. K., ”An
optimized steel micro-switch with low switching voltage and high recoil force,”
Proc. Of Int. Conf. on Smart Materials, Structures and Systems (ISSS’12)
[9] Ozkeskin, F.M., “Bulk foil Pt-Rh micro-relays for high power RF and other
applications,” Ph.D dissertation, University of Michigan, Ann Arbor, USA.
[10] Banerjee, S., “Design and simulation of an RF-MEMS switch,” Master of
Engineering Report, Department of Mechanical Engineering, Indian Institute of
Science, Bangalore, India, June 2011.
[11] Bao, M., and Yang, H., “Squeeze film air damping in MEMS,” Sens. Actuators A,
136, 2007, pp. 3-27.
[12] Hartog, J. P. D., Mechanical Vibrations, Dover Publications (1985)
[13] Thomson, W. T., and Dahleh, M. D., Theory of Vibration with Applications, New
Delhi: Pearson education, 2007, ch. 10.
[14] Mehner, J. E., Doetzel, W., Schauwecker, B. and Ostergaard, D., “Reduced order
modeling of fluid structural interactions in MEMS based on modal projection
techniques:, Proc. of 12th
Int. Conf. on Solid State Sensors, Actuators and
Microsystems, 2003.

59
[15] Kim, E., Cho, Y., and Kim, M., “Effect of holes and edges on the squeeze film
damping of perforated micromechanical structures,” Proc. of 12th
IEEE Int. Conf.
on Microelectromechanical Systems (MEMS’99), pp. 296-301.
[16] Jensen, B. D., “Multi-physics modeling and experimental investigation of low-force
MEMS switch contact behavior,” PhD Thesis, University of Michigan, Ann Arbor,
MI, USA, 2004.
[17] Holm, R., Electric Contacts, Berlin: Springer-Verlag, 1967.
[18] Rebeiz, G. M. and Muldavin, J. B., “RF MEMS switches and switch circuits,” IEEE
microwave magazine, 2001.
[19] Nielson, G. N., and Barbastathis, G., “Dynamic pull-in of parallel-plate and
torsional electrostatic MEMS actuators,” J. Microelectromechanical Sytems, 15(4),
2006.
[20] T. Veijola, H. Kuisma, J. Lahdenpera, T. Ryhanen, “Equivalent-circuit model of the
squeezed gas film in a silicon accelerometer,” Sens. Actuators A, 4, 1998, pp.239–
248.
[21] J. Starr, “Squeeze film damping in solid-state accelerometers,” in: IEEE Workshop
on Solid-state Sensor and Actuator, Hilton Head Island, SC,USA, 1990, pp. 44–47.
[22] Cook, R. D., Malkus, D. S., Pleasha, M. E., and Witt, R. J., Concepts and
Applications of Finite Element Analysis, New Delhi: Wiley India, 2009, pp. 389-
390.
[23] Younis, M. I., Abdel-Rahman, E. M., and Nayfeh, A., “A reduced-order model for
electrically actuated microbeam-based MEMS,” J. Microelectromechanical
Systems, vol. 12, no. 5, pp. 672-680, Oct. 2003.
[24] Hung, E. S., and Senturia, S. D., “Generating efficient dynamical models for
microelectromechanical systems from a few finite-element simulation runs,” IEEE
J. Microelectromechanical Systems, 8(3), 1999
[25] Vyasarayani, C. P., Abdel-Rahman, E. M., McPhee, J., and Birkett, S., “Modeling
MEMS resonators past pull-in,” J. Computational and Nonlinear Dynamics, vol. 6,
July 2011.
[26] Kalpakjian, S., Manufacturing Engineering and Technology, Pearson, 2001.
[27] Bromley, S. C., and Nelson, B. J., “Performance of microcontacts tested with a
novel MEMS device,” Proc. 47th
IEEE Holm Conf. Electrical Contacts, pp. 122-
127, 2001.
[28] Slade, P. G. (editor), Electrical Contacts: Principles and Applications, New York:
Marcel Dekker, 1999, pp. 2-3.
[29] Park, N., Suh, J. and Jeon, K., “Contact force model for beam with discretely
spaced gap supports and its approximated solution,” Nuclear Engineering and
Technology, 43(5), Oct 2011.
[30] Mankame, N. D., and Ananthasuresh, G. K., “Topology optimization for synthesis
of contact-aided compliant mechanisms using regularized contact modeling,”
Computers and Structures, 82, 2004, pp. 1267-1290.

60
[31] Gilardi, G., and Sharf, I., “Literature survey of contact dynamics modelling,” Mech.
Mach. Theory, 37(10), pp. 1213-1239.
[32] Schimkat, J.,“Contact materials for microrelays,” 11th
IEEE Int. Conf. On
Microelectromech. Syst., 1998, pp. 190-194
[33] Ananthasuresh, G. K., Vinoy, K. J., Gopalakrishnan, S., Bhat, K. N., and Aatre, V.
K., Micro and Smart Systems: Technology and Applications, New York: John-
Wiley, 2011.
[34] Y. C. Fung, Foundations of Solid Mechanics, Prentice-Hall, 1988.