Current Status of Isogeometric Analysis in LS-DYNA
23
12 th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany Current Status of Isogeometric Analysis in LS-DYNA Stefan Hartmann Developer Forum, September 24 th , 2013, Filderstadt, Germany Development in cooperation with: D.J. Benson: Professor of Applied Mechanics, University of California, San Diego, USA
Transcript of Current Status of Isogeometric Analysis in LS-DYNA

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
Current Status of Isogeometric Analysisin LS -DYNA
Stefan Hartmann
Developer Forum , September 24th, 2013, Filderstadt, Germany
Development in cooperation with:D.J. Benson: Professor of Applied Mechanics, University of California, San Diego, USA

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
Outline� Isogeometric Analysis
- motivation / definition
� NURBS-based finite elements- NURBS / *ELEMENT_SHELL_NURBS_PATCH / elements - connectivity
� Todo-List- mass-scaling / merging / trimmed NURBS / NURBS-solids / LSPP / …
� Current status- MPP / examples / limits / LSPP / …
� Contact with NURBS- smoothness / example
� Shell formulations- continuity / rotation free shells / blended shells

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
Isogeometric Analysis – motivation & definition
� ISOPARAMETRIC (FE-Analysis)use same approximation for geometry and deformation
GEOMETRY �� DEFORMATION
� ISOGEOMETRIC (CAD - FEA)same description of the geometry in the design (CAD) and the analysis (FEA)
CAD �� FEA
� common geometry descriptions in CAD- NURBS (Non-Uniform Rational B-splines) � most commonly used- T-splines � enhancement of NURBS- subdivision surfaces � mainly used in animation industry- and others
� reduce effort of geometry conversion from CAD into a suitable mesh for FEA (?)
� reduce discretization errors � adaptivity
� increase continuity of geometry representation � contact / rot. free shells / …

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� NURBS = Non Uniform Rational Basis Spline
NURBS-based finite elements
Control-Points
Control-Net
Elements
� A typical NURBS-Patch and the elements- elements are defined through the knot-vectors- shape functions for each control-point (�DOFs)
� B-spline basis functions- recursive- positive everywhere- dependent on knot-vector and polynomial order- normally C(P-1)-continuity- „partition of unity“ (like Lagrange polynomials)- refinement (h/p and k) without changing theinitial geometry � adaptivity
- control points are normally not a part of thephysical geometry (non-interpolatory basis functions)
� NURBS- B-spline basis functions + control net with weights- all mentioned properties for B-splines apply for NURBS

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
xy
z
*ELEMENT_SHELL_NURBS_PATCH$---+--EID----+--PID----+--NPR----+---PR----+--NPS----+---PS----+----7----+----8
11 12 4 2 5 2$---+--WFL----+-FORM----+--INT----+-NISR----+-NISS----+IMASS----+----7----+----8
0 0 1 2 2 0$rk-+----1----+----2----+----3----+----4----+----5----+----6----+----7----+----8
0.0 0.0 0.0 1.0 2.0 2.0 2.0$sk-+----1----+----2----+----3----+----4----+----5----+----6----+----7----+----8
0.0 0.0 0.0 1.0 2.0 3.0 3.0 3.0$net+---N1----+---N2----+---N3----+---N4----+---N5----+---N6----+---N7----+---N8
1 2 3 45 6 7 89 10 11 12
13 14 15 1617 18 19 20
Control Points
Control Net
NURBS-based finite elements
r
s
20
3
4
1
2
5 6
9
7
8
1011
12
13
14
15
16
17
1819
Elements

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
NURBS-based finite elements� A typical NURBS-Patch and the definition of elements
- elements are defined through the knot-vectors (interval between different values)- shape functions for each control-point
r
s
0 1 20
1
2
3
M1
M2
M3
M4
M5
N1 N2 N3N4
NURBS-Patch(physical space)
NURBS-Patch(parameter space)
Control-Points
Control-Netrknot=[0,0,0,1,2,2,2]
skno
t=[0
,0,0
,1,2
,3,3
,3]
Element
polynomial order:- quadratic in r-direction (pr=2)- quadratic in s-direction (ps=2)
r
s
xy
z

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
Nurbs-Element (automatic)
Interpolation Node (automatic)
Interpolation Element (automatic)
Control Points (*NODE)
Control Net
(*ELEMENT_SHELL_NURBS_PATCH)
Connectivity of
Nurbs-Element (automatic)
Nurbs-Surface (physical space)
3937
38
16
15
14
13
12
11
1718 19
36
35
34
33
32
31
26
25
24
23
22
21
2728 29
6
5
3
1
78
9
4
2r
s
Interpolation Elements
(postprocessing/contact/BC)
NISR=2 / NISS=2
Nurbs-Surface (parameter space)
r7
B-spline basis functions (r-direction)
B-s
pli
ne
ba
sis
fun
ctio
ns
(s-d
ire
ctio
n)
r-knot: [0,0,0,1,2,3,4,5,6,7,7,7]
s-k
no
t: [
0,0
,0,1
,2,2
,2]
s
2
NURBS-based finite elements
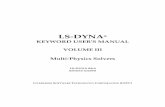
LS-DYNA®
KEYWORDUSER’S MANUAL
VOLUME I
Livermore SoftwareTechnology Corporation
(LSTC)
from:

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
Shell formulations
NURBS(bi-quadratic)
LAGRANGE(bi-quadratic)C1-lines
� FORM=0:- shear deformable shell theorywith rotational DOFs(6DOFs/control point)
� FORM=1: (requires C1)- rotation free shell theorywithout rotational DOFs(3DOFs/control point)
� FORM=4/-4:- hybrid shell formulationcombination of FORM=0 andFORM=1 (especially necessaryat patch boundaries wherecontinuity drops to C0)
� continuity at element boundary- Lagrange: C0
- NURBS: Cp-1
support of shape functions(control points) do overlap
vs.

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� G1 continuity along patch boundaries - at patch boundaries: C0-lines (no transmission of bending moments with rot-free formulation)- add rotational DOFs at patch boundary (hybrid/blended shell: FORM=4/-4)
One single patch(rot-free)
Two patches(rot-free, coupled)
Two patches(rot-free, kink)
Kink! Kink!
Shell formulations – multi-patch coupling (rotation free formulation)

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� keep angle at discontinuities (internal C0-lines) - no transmission of bending moments with rot-free formulation � kinks- add rotational DOFS at interior control points (FORM=4)
rot-free (kink)
90 -angle
90 -angle
Kink!
coupling orformulation with rotational DOFs
piano hinges
Shell formulations – multi-patch coupling (rotation free formulation)

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� all (penalty based) contacts available- use interpolation shell elements (lin. Quads) - loss of smooth (contact) surface representation� may lead to problems in tangential sliding
interpolation shells (rough)
interpolation shells (fine)
NURBS-surface (smooth)
� NURBS contact for (SMP only )*CONTACT_AUTOMATIC_1WAY_S2S - use NURBS representation on master side - smooth contact behavior (i.e. tangential sliding)
Contact with NURBS
*CONTROL_CONTACT$Optional 6 -2 -3 -4 -5 -6 -7 -8$---SHLEDG----PSTIFF----ITHCNT----TDCNOF-----ftall---------6----shltrw----igactc
1

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� comparison *Contact_Automatic_One_Way_Surface_To_Surface- IGACTC=0: master surface defined by interpolation elements (faceted)- IGACTC=1: master surface defined by NURBS surface (smooth)- _SMOOTH: smooth curve-fitted surface to represent master surface
Contact with NURBS – sliding example
� Example: Tube-In-Tube (both elastic bodies – properties of steel)- frictionless sliding- outer tube is fixed- inner tube is free to move- inner tube with initial rotationalvelocity (death: t=0.01)
- termination time: t=0.1
t
v (rz)
xz
y0.01

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� discretization- inner tube: 8x12 bi-quadratic NURBS element- outer tube: 4x16 bi-quadratic NURBS element- 2x2 bi-linear interpolation shells per NURBS element
Contact with NURBS – sliding example
� Version A- inner tube is master- outer tube is slave
NURBS
interpolationelements
x
z
y P
P
free to rotate
_SMOOTH
IGACTC=0
IGACTC=1

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� discretization- inner tube: 8x12 bi-quadratic NURBS element- outer tube: 4x16 bi-quadratic NURBS element- 2x2 bi-linear interpolation shells per NURBS element
Contact with NURBS – sliding example
� Version B- inner tube is slave- outer tube is master
NURBS
interpolationelements
x
z
y P
P
free to rotate
_SMOOTH
IGACTC=0
IGACTC=1

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� computational time
Contact with NURBS – sliding example
Version A Version B
CPU time #of cycles CPU time #of cycles
IGACTC=0 3 min 32 sec 346535 3 min 18 sec 346484 SMP (single) ncpu=1
IGACTC=1 9 min 27 sec 346537 7 min 55 sec 346536 SMP (single) ncpu=1
_SMOOTH 8 min 43 sec 346484 6 min 10 sec(loss of contact ataround t=0.03)
349561 MPP (single)-np 1
� NURBS contact (IGACTC=1)- insensitive to Slave-Master-Pair definition- more expensive than standard contact (IGACTC=0) but comparable with _SMOOTH option- NOTE: comparison is not representative (SMP vs. MPP), _SMOOTH option and Version B
looses contact around t=0.03 (30% of computation time)

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
Current status - summary
� Keyword: *ELEMENT_SHELL_NURBS_PATCH- definition of NURBS-surfaces- shell formulations with/without rotational DOFs and hybrid shell- NURBS elements run in MPP with good scaling- NURBS contact(*CONTACT_AUTOMATIC_ONE_WAY_SURFACE_TO_SURFACE, IGACTC=1, SMP only)
� Pre- and Postprocessing- work in progress for LS-PrePost … current status (lspp4.1beta)� visualization of 2D-NURBS-Patches � import IGES-format and construct *ELEMENT_SHELL_NURBS_PATCH� modification of 2D-NURBS geometry� … much more to come!
� Postprocessing and boundary conditions (i.e. contact) mainly with- interpolation nodes (automatically created)- interpolation elements (automatically created)
� Analysis capabilities- implicit and explicit time integration- eigenvalue analysis- other capabilities (e.g. geometric stiffness for buckling) implemented but not yet tested
� LS-DYNA material library available (including umats)

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
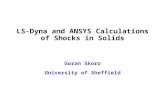
Example – Vibration of a square plate
L
L
1,0E-14
1,0E-12
1,0E-10
1,0E-08
1,0E-06
1,0E-04
1,0E-02
1,0E+00
1 10 100 1000 10000
fully integrated shell (ELFORM=16)
NURBS P=2 (rotation free)
NURBS P=3 (rotation free)
NURBS P=4 (rotation free)
� eigenvalue analysis- simply supported square plate- linear elastic material- consistent mass matrix- rotation free shell formulation
� accuracy of first eigenvalue
Number of Nodes
Err
or=
(Cal
cula
ted-
Exa
ct)/
Exa
ct

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� nonlinear dynamic buckling- isotropic elastic-plastic material- linear plastic hardening- NURBS (P=2,3,4)- Reissner-Mindlin formulation
Example – dynamic buckling
Experimental results from Kyriakides S. Kyriakides, Personal communication, 2008
� good agreement of - buckling load & buckling pattern- Reissner-Mindlin shell formulations (P=2,3,4)

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
D.J. Benson
� mesh:- 640 quartic (P=4) elements- 1156 control points- 3 integration points through thickness
� standard benchmark for automobile crashworthiness� quarter symmetry to reduce cost� perturbation to initiate buckling mode� J2 plasticity with linear isotropic hardening
Example - buckling

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
� spotweld modeling with*CONTACT_TIED_SHELL_EDGE_TO_SURFACE_OFFSET
Example – column crush

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
Example - forming

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
FEA:
FEA:
FEA:
� regular NURBS-patch
� trimmed NURBS
� 4 regular NURBS-patches
Control Points
Control Net
trimmingcurve
- reparametrization- C0-lines at patchboundaries
- standard in CAD
Current status - limits

12th LS-DYNA Forum 24 - 25 September 2013, Filderstadt, Germany
Summary
� higher order accurate isogeometric analysis may be cost competitive
� code optimization necessary to make it faster
� NURBS contact works well
� NURBS-based elements run stable and scale good in MPP
� further implementation- post-processing directly with NURBS (partially available already)- mass scaling- NURBS contact implementation for MPP- merging of non-matching NURBS patches- trimmed NURBS (research currently done at UCSD)- make pre- and post-processing more user-friendly and faster- introduce 3D NURBS elements- … much more
ToDo-List� perform a lot more studies in different fields � experience� motivate customers (and researchers) to “play” with these elements
� model creation with standard NURBS is currently the bottleneck!