CONFORT ET TENUE DE ROUTE -...
33
1 CONFORT ET TENUE DE ROUTE Pierre DUYSINX Ingénierie des Véhicules Terrestres Université de Liège Année académique 2010-2011 Références bibliographiques T. Gillespie. « Fundamentals of vehicle Dynamics », 1992, Society of Automotive Engineers (SAE) R. Bosch. « Automotive Handbook ». 5th edition. 2002. Society of Automotive Engineers (SAE) J.Y. Wong. « Theory of Ground Vehicles ». John Wiley & sons. 1993 (2nd edition) 2001 (3rd edition).
Transcript of CONFORT ET TENUE DE ROUTE -...

1
CONFORT ET TENUE DE ROUTE
Pierre DUYSINXIngénierie des Véhicules Terrestres
Université de LiègeAnnée académique 2010-2011
Références bibliographiques
T. Gillespie. « Fundamentals of vehicle Dynamics », 1992, Society ofAutomotive Engineers (SAE)R. Bosch. « Automotive Handbook ». 5th edition. 2002. Society ofAutomotive Engineers (SAE)J.Y. Wong. « Theory of Ground Vehicles ». John Wiley & sons. 1993 (2nd edition) 2001 (3rd edition).

2
Plan de l’exposé
IntroductionSources de vibrations
Le profil de la routeExcitations à bord du véhicule
L’assemblage roue / pneuLa ligne de transmissionLe moteur
Réponse humaine aux vibrationsModèles de tenue de route du véhiculeModèle à 2 ddls ou modèle de quart de voitureModèle à 2 ddls ou modèle de tangage / pompage
Introduction

3
Introduction
En se mouvant à une certaine vitesse, l’automobile est soumise à un large spectre vibratoireLes vibrations affectent les passagers de manière visuelle, tactile ou auditiveLe terme de « ride »
Se réfère communément aux sensations tactiles ou visuellesFréquences basses: 0 -25 Hz
Le bruit Caractérise les sensations auditivesFréquences plus élevées : 25 – 20.000 Hz
Distinction peut devenir difficile, car les deux types de fréquences sont souvent reliées
Introduction
Environnement vibratoire est un des critères les plus importants de jugement de la qualité d’une voitureMais
Jugement subjectifDifficulté des méthodes objectives de mesure de la performance
Comportement vibratoire des véhiculesEst caractérisé par un contenu fréquentiel à basse fréquence, car le véhicule est monté sur des pneumatiques en caoutchoucDépend de la nature de l’excitationEst influencé par la réponse dynamique du système véhicule
4
Introduction
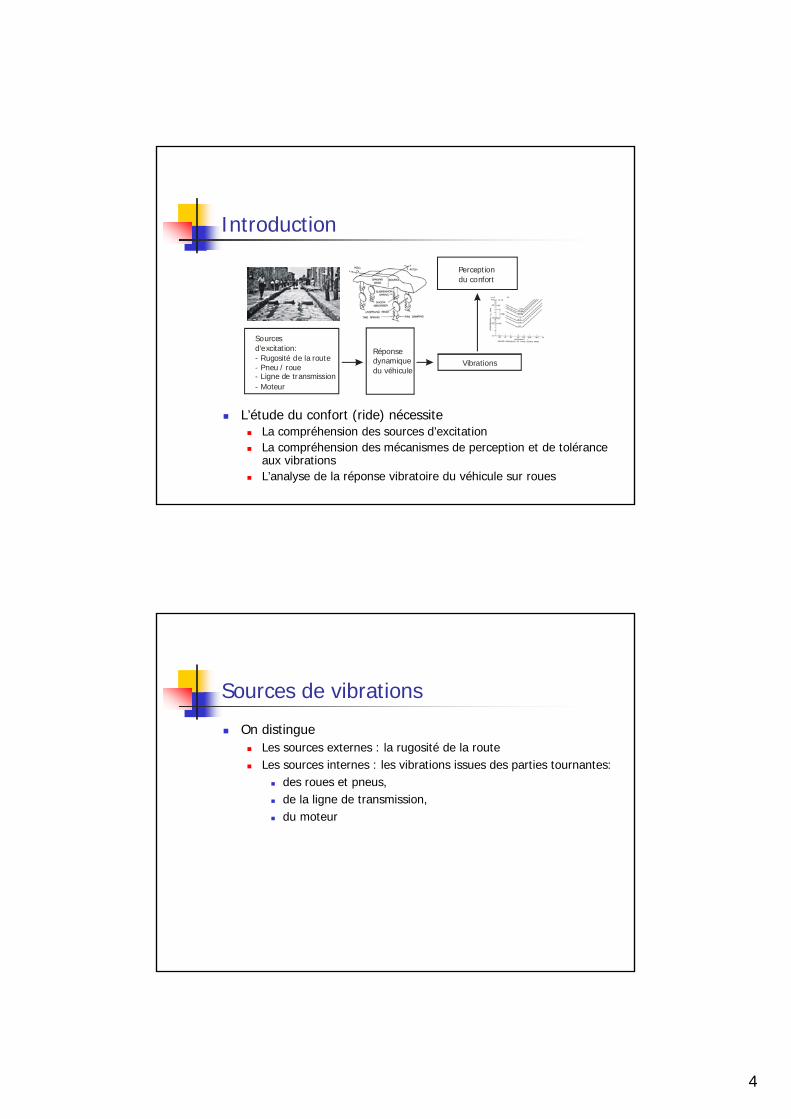
L’étude du confort (ride) nécessiteLa compréhension des sources d’excitationLa compréhension des mécanismes de perception et de tolérance aux vibrationsL’analyse de la réponse vibratoire du véhicule sur roues
Sources d’excitation:- Rugosité de la route- Pneu / roue- Ligne de transmission- Moteur
Réponse dynamiquedu véhicule
Vibrations
Perceptiondu confort
Sources de vibrations
On distingue Les sources externes : la rugosité de la routeLes sources internes : les vibrations issues des parties tournantes:
des roues et pneus, de la ligne de transmission, du moteur

5
Rugosité de la route
Rugosité de la route
Recouvre aussi bien les trous (nids de poule, etc.) que déviations aléatoires du profil de la route résultant des imprécisions inhérentes à la fabrication et que de la réparation de la surface de la route.La rugosité est décrite par le profil en élévation le long de la trajectoire des roues.La rugosité est caractérisée par un signal aléatoire à large bandeElle peut être décrite soit par le profil lui-même, soit par ses données statistiques. Une représentation habituelle : la distribution de densité de puissance spectrale.La fréquence spatiale est donnée en termes de cycles/mètre, soit l’inverse de la longueur d’onde spatiale des ondulations
6
Rugosité de la route
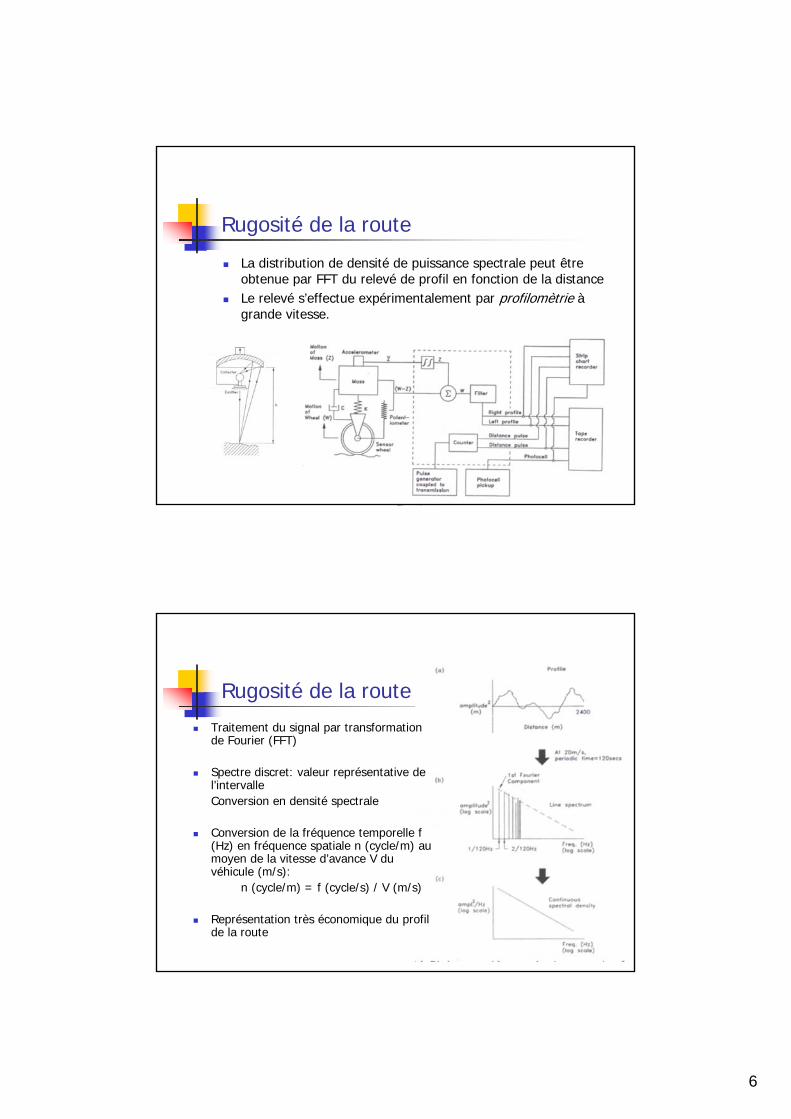
La distribution de densité de puissance spectrale peut être obtenue par FFT du relevé de profil en fonction de la distanceLe relevé s’effectue expérimentalement par profilomètrie àgrande vitesse.
Rugosité de la route
Traitement du signal par transformation de Fourier (FFT)
Spectre discret: valeur représentative de l’intervalleConversion en densité spectrale
Conversion de la fréquence temporelle f (Hz) en fréquence spatiale n (cycle/m) au moyen de la vitesse d’avance V du véhicule (m/s):
n (cycle/m) = f (cycle/s) / V (m/s)
Représentation très économique du profil de la route

7
Rugosité de la route
On constate que pour toutes les routes, la courbe de PSD en fonction de la fréquence diminue
Approximativement, elle est donnée par une loi du type
Avec p entre 2 et 3; p~2,5, la pente de la droite dans un graphique log-log
En effet les déviations de l’ordre des dizaines de mètres ont des amplitudes de l’ordre du cm tandis que les déviations de l’ordre du mm ont des amplitudes de l’ordre du mm.)
( ) pS n G n−=
Rugosité de la route
Souvent on constate une discontinuitéde pente, ce qui suggère une fonction de densité spectrale
avec n0 la fréquence de discontinuitéEn outre il existe une fréquence de coupure nco en dessous de laquelle la densité de puissance spectrale reste constante
1
00
2
00
( )
p
p
nG if n nn
S nnG if n nn
−
−
⎧ ⎛ ⎞⎪ ≤⎜ ⎟⎪⎪ ⎝ ⎠= ⎨
⎛ ⎞⎪>⎜ ⎟⎪
⎪ ⎝ ⎠⎩

8
Rugosité de la route
Si la surface de la route est parcourue à vitesse constante V (m/s), alors l’équation peut être réécrite en fonction de la fréquence au lieu de la longueur d’onde:
On peut voir que parcourir la route à une vitesse plus grande a le même effet pour solliciter la suspension que de rouler sur une surface plus rugueusePour des modèles linéaires, la sollicitation décrite ci-dessus peut être appliquée directement comme entrée pour l’analyse fréquentiellePour des modèles non linéaires, il est nécessaire de passer au domaine temporel et de recréer le profil de route
1
( )p
p
VS f Gf
−
=
Réponse humaine aux vibrations

9
Réponse humaine aux vibrations
En général, les limites du confort (ou d’inconfort) des humains aux vibrations sont difficiles à déterminer à cause de
La variabilité de la sensibilité des individusDe l’absence d’une méthodologie acceptée uniformément pour la déterminer
Des recherches considérables sont toutefois dévouées à la questionDifférentes méthodes ont été utilisées :
Des mesures subjectives de la tenue de routeDes tests sur table vibranteDes tests en simulateur de conduiteDes mesures sur véhicule
Avec les années, plusieurs critères de confort ont été proposés
Réponse humaine aux vibrations
Test sur simulateur de conduite

10
Réponse humaine aux vibrations
CritCritèère du re du Ride Ride andandVibration Data Vibration Data ManualManual J6aJ6ade la SAEde la SAE, aussi connu sous le nom de critcritèère re JanewayJaneway.Ce critère donne l’amplitude admissible des vibrations verticales en fonction de leurfréquence.Lorsque la fréquence augmente, l’amplitude admissible diminue fortement
Réponse humaine aux vibrations
Critère Janeway est constitué de 3 zones linéaires où on limite la valeur de pic du jerk, de l’accélération, de la vitesse:
Zone 1-6 Hz: jerk< 12.6 m/s³Zone 6-20 Hz : accélération < 0.33 m/s²Zone 20-60 Hz : vitesse < 2.710-3 m/s
Remarque : jerk = d³z/dt³ = amplitude * pulsation³, accélération = d²z/dt² = amplitude * pulsation²Vitesse = dz/dt = amplitude * pulsation
Exemple: amplitude max à 1Hz 12.6 / (2 π * 1 Hz)³ = 0.0508 m

11
Réponse humaine aux vibrations
Remarques: Le critère est basé sur un signal sinusoïdal vertical à une seule fréquenceQue se passe-t-il lorsque on a plusieurs fréquences simultanées?Probablement: la composante qui représente la plus grande sensation gouverne le sentiment d’inconfortCritères établis avec des sièges rigides
Réponse humaine aux vibrations
Guide gGuide géénnééral ral ééditditéé par lpar l’’ISO (ISO 2631)ISO (ISO 2631) définit la tolérance humaine aux vibrations d’ensemble du corpsS’applique aux systèmes de transport ou à l’industrieLe guide définit 3 limites distinctes pour les vibrations dans la gamme 1-80 Hz
Limites d’exposition: reliées à la sécurité ou à la préservation de la santé, elles ne doivent être dépassées qu’avec des justifications très spécialesLimites de fatigue ou de capacité décroissante, liées à la préservation de l’aptitude au travail. Elles s’appliquent aux tâches telles que la conduite de véhicules ou de tracteursLes limites de confort réduit, qui concernent la préservation du confort, ce qui dans les moyens de transport correspond à la capacité de lire, écrire ou manger dans les véhicules

12
Réponse humaine aux vibrations
Wong Fig 7.2 : Limites des vibrations d’ensemble pour la fatigue et la capacité décroissante dans les directions verticales (a)
et transversales (b) selon l’ISO 2631
Réponse humaine aux vibrations
Les critères donnent l’accélération RMS en fonction de la fréquenceLorsque l’accélération a lieu selon plusieurs directions, le critère s’applique à chaque composanteLes limites de sécurité sont obtenues à partir de celles pour la fatigue en augmentant celle-ci de 6dB (facteur 2)Les limites de confort réduit s’obtiennent à partir de celles pour la fatigue en retirant 10 dB (facteur 3.15)Les fréquences en dessous de 1 Hz sont un problème important, car elles impliquent des mouvements qui rendent malade. Une limite très sévère est proposée par l’ISO pour les fréquences entre 0.1 et 1Hz

13
Réponse humaine aux vibrations
La puissance absorbLa puissance absorbééee, qui est le produit de la force de vibration par la vitesse transmise au corps humain, a été aussi proposé comme un paramètre significatif de la réponse du corps aux vibrations.Traduit une mesure du taux auquel le corps absorbe les vibrationsUtilisé pour définir la tolérance aux vibrations dans les véhicules militaires tout-terrain. Le critère est à la base de l’US ArmyAMM-75 Ground Mobility Model et du NATO Reference MobilityModel pour évaluer les véhicules militairesLa limite de tolérance actuelle est de 6W absorbée à la position du conducteurLa vitesse limitant le confort est celle à laquelle la puissance moyenne absorbée sur le temps total atteint le niveau de 6W
Modèles pour le confort

14
Modèles de tenue de route du véhicule
Wong : Fig 7.7Modèle à 2 ddlpour le tangageet le pompage
Wong : Fig 7.6Modèle à 2 ddl, ouquart de voiture
Wong : Fig 7.3Modèle à 7 ddl
Modèle de quart de voiture

15
Modèle à 2 ddl pour les masses suspendues et non suspendues
Modèle de quart de voiture
Equations du mouvement
m s Ä z 1 + c sh ( _ z 1 ¡ _ z 2) + k s ( z 1¡ z 2) = 0
m u s Ä z 2+ c s h ( _ z 2 ¡ _ z 1 ) + k s ( z 2¡ z 1) + c t _ z 2+ k trz 2 = F ( t ) = c t _ z 0+ k tr z 0
z0
z1
z2
ms
mus
kscsh
ktr ct
Modèle à 2 ddl pour les masses suspendues et non suspendues
Etude des vibrations naturelles du système non amorti
Solutions harmoniques
Le système s’écrit
L’équation caractéristique
z 1 = Z 1 c o s ! n t
z 2 = Z 2 c o s ! n t
m s Ä z 1 + k s z 1 ¡ k s z 2 = 0
m u s Ä z 2 + ( k s + k t r ) z 2 ¡ k s z 1 = 0
! 4 n ( m s m u s ) ¡ !
2 n ( m s k s + m s k t r + m u s k s ) + k s k t r = 0
( ¡ m s !
2 n + k s ) Z 1 ¡ k s Z 2 = 0
¡ k s Z 1 + ( ¡ m u s ! 2 n + ( k s + k t r ) ) Z 2 = 0

16
Modèle à 2 ddl pour les masses suspendues et non suspendues
Fréquences naturelles
Remarques: compte tenu que ms > mus et que ks < ktr, elles sont assez proches des fréquences découplées
A 1 = m s m u s
B 1 = m s k s + m s k t r + m u s k s
C 1 = k s k t r
f n ; s =
1
2 ¼
s
k s k t r = ( k s + k t r )
m s
f n ; u s =
1
2 ¼
r
k s + k t r
m u s
! 2
n 1 =
B 1 ¡
p
B 2
1 ¡ 4 A 1 C 1
2 A 1
! 2
n 2 =
B 1 +
pB 2
1 ¡ 4 A 1 C 1
2 A 1
Modèle à 2 ddl pour les masses suspendues et non suspendues
Exercice:
fn1 = 1.04 Hzfn2 = 10.5Hz
17
Modèle à 2 ddl pour les masses suspendues et non suspendues
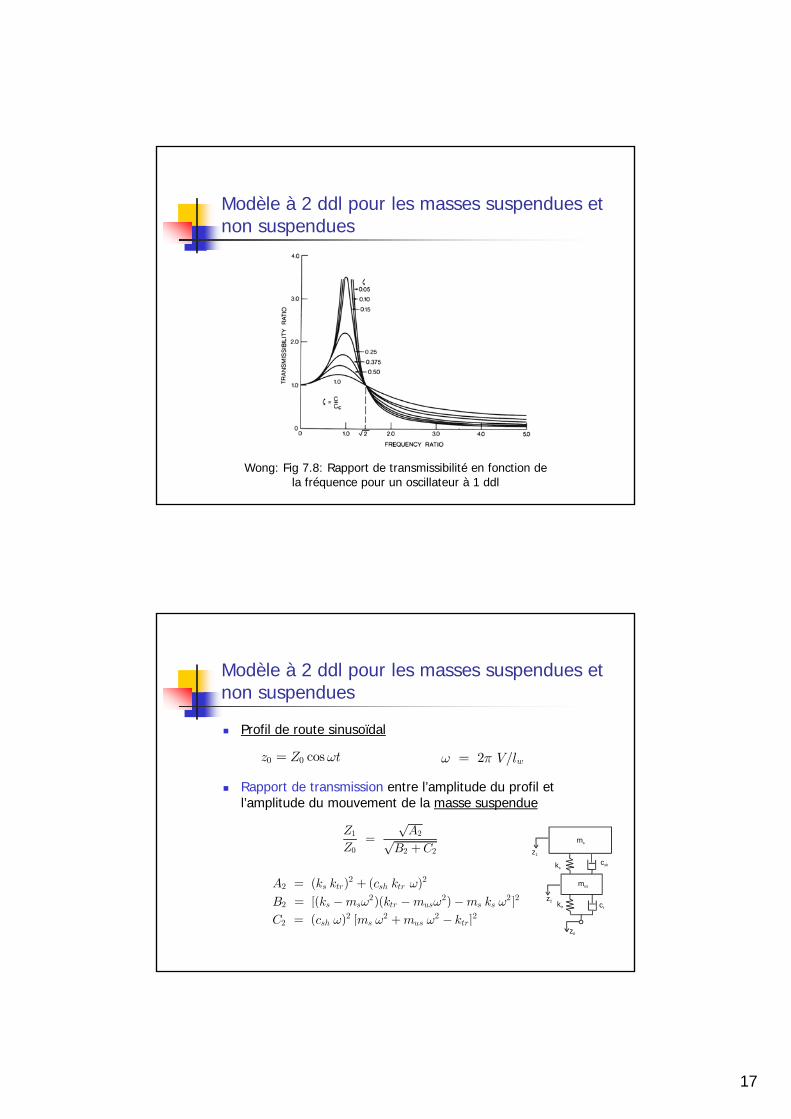
Wong: Fig 7.8: Rapport de transmissibilité en fonction dela fréquence pour un oscillateur à 1 ddl
Modèle à 2 ddl pour les masses suspendues et non suspendues
Profil de route sinusoïdal
Rapport de transmission entre l’amplitude du profil et l’amplitude du mouvement de la masse suspendue
z 0 = Z 0 c o s ! t
! = 2 ¼ V = l w
Z 1
Z 0
=
p
A 2 p
B 2 + C 2
A 2 = ( k s k t r )
2 + ( c s h k t r ! ) 2
B 2 = [ ( k s ¡ m s ! 2 ) ( k t r ¡ m u s !
2 ) ¡ m s k s ! 2 ] 2
C 2 = ( c s h ! ) 2 [ m s !
2 + m u s ! 2 ¡ k t r ]
2
z0
z1
z2
ms
mus
kscsh
ktr ct

18
Modèle à 2 ddl pour les masses suspendues et non suspendues
Rapport de transmission entre l’amplitude du profil et l’amplitude du mouvement de la masse non suspendue
A 2 = ( k s k t r )
2 + ( c s h k t r ! ) 2
B 2 = [ ( k s ¡ m s ! 2 ) ( k t r ¡ m u s !
2 ) ¡ m s k s ! 2 ] 2
C 2 = ( c s h ! ) 2 [ m s !
2 + m u s ! 2 ¡ k t r ]
2
Z 2
Z 0
=
p
A 3 p
B 2 + C 2
A 3 = [ k t r ( k s ¡ m s ! 2 ) ] 2 + ( c s h k t r ! )
2
z0
z1
z2
ms
mus
kscsh
ktr ct
Modèle à 2 ddl pour les masses suspendues et non suspendues
Rapports de transmission dans le cas où on néglige l’amortissement i.e. csh =0
Z 1
Z 0
= k s k t r
( k s ¡ m s ! 2 ) ( k t r ¡ m u s ! 2 ) ¡ m s k s ! 2
= k s k t r
m s m u s ( ! 2 n 1 ¡ ! 2 ) ( !
2 n 2 ¡ ! 2 )
Z 2
Z 0 =
k t r ( k s ¡ m s ! 2 )
( k s ¡ m s ! 2 ) ( k t r ¡ m u s ! 2 ) ¡ m s k s ! 2
= k t r ( k s ¡ m s !
2 )
m s m u s ( ! 2 n 1 ¡ ! 2 ) ( !
2 n 2 ¡ ! 2 )
19
Modèle à 2 ddl pour les masses suspendues et non suspendues
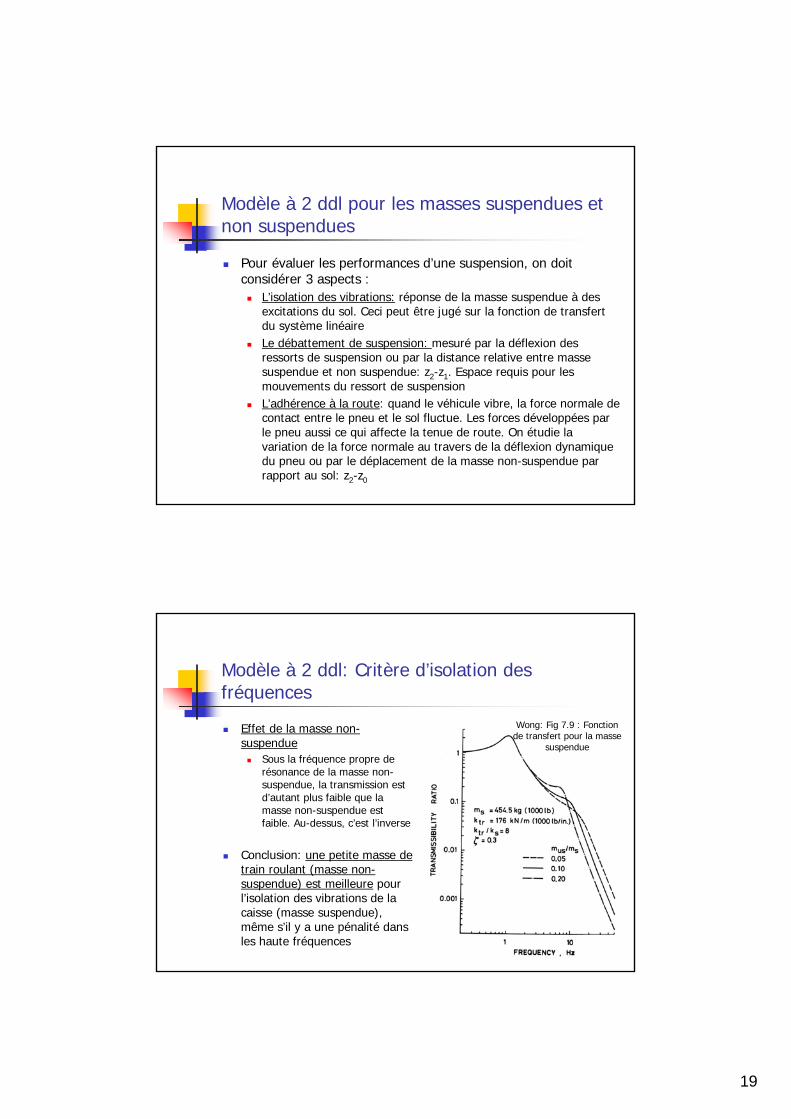
Pour évaluer les performances d’une suspension, on doit considérer 3 aspects :
L’isolation des vibrations: réponse de la masse suspendue à des excitations du sol. Ceci peut être jugé sur la fonction de transfert du système linéaireLe débattement de suspension: mesuré par la déflexion des ressorts de suspension ou par la distance relative entre masse suspendue et non suspendue: z2-z1. Espace requis pour les mouvements du ressort de suspensionL’adhérence à la route: quand le véhicule vibre, la force normale de contact entre le pneu et le sol fluctue. Les forces développées par le pneu aussi ce qui affecte la tenue de route. On étudie la variation de la force normale au travers de la déflexion dynamique du pneu ou par le déplacement de la masse non-suspendue par rapport au sol: z2-z0
Modèle à 2 ddl: Critère d’isolation des fréquences
Effet de la masse non-suspendue
Sous la fréquence propre de résonance de la masse non-suspendue, la transmission est d’autant plus faible que la masse non-suspendue est faible. Au-dessus, c’est l’inverse
Conclusion: une petite masse de train roulant (masse non-suspendue) est meilleure pour l’isolation des vibrations de la caisse (masse suspendue), même s’il y a une pénalité dans les haute fréquences
Wong: Fig 7.9 : Fonction de transfert pour la masse
suspendue
20
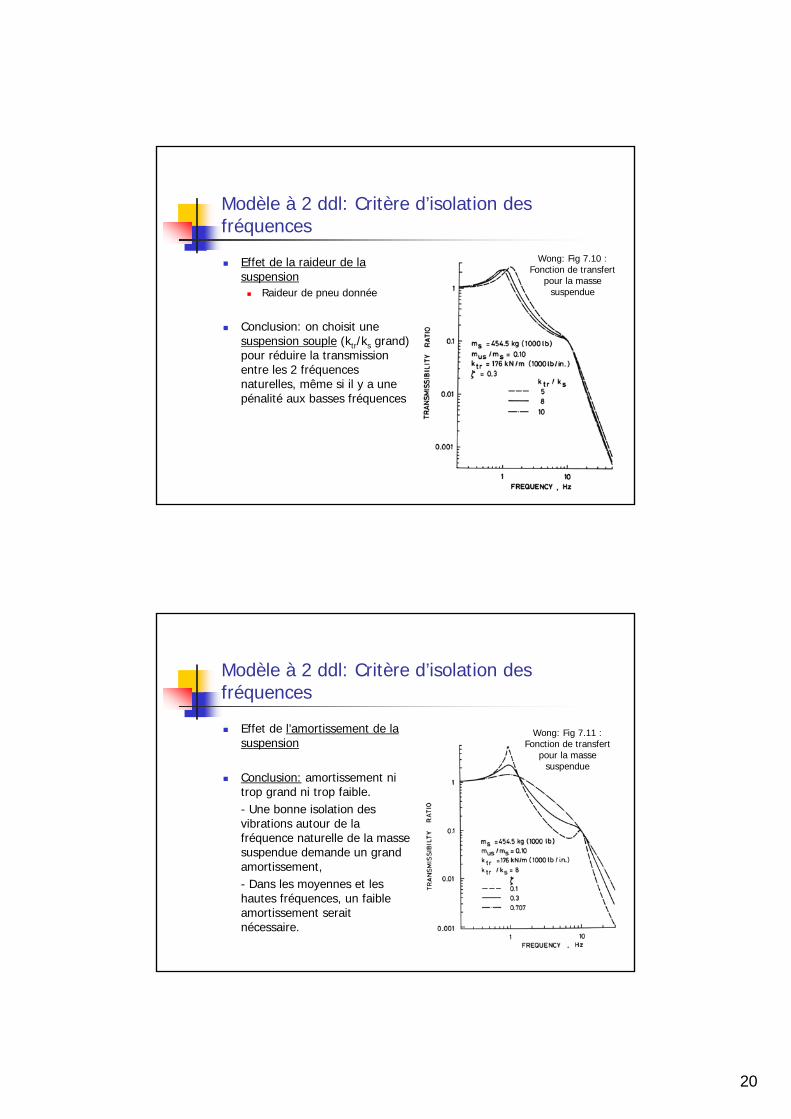
Modèle à 2 ddl: Critère d’isolation des fréquences
Effet de la raideur de la suspension
Raideur de pneu donnée
Conclusion: on choisit une suspension souple (ktr/ks grand) pour réduire la transmission entre les 2 fréquences naturelles, même si il y a une pénalité aux basses fréquences
Wong: Fig 7.10 : Fonction de transfert
pour la masse suspendue
Modèle à 2 ddl: Critère d’isolation des fréquences
Effet de l’amortissement de la suspension
Conclusion: amortissement ni trop grand ni trop faible.- Une bonne isolation des vibrations autour de la fréquence naturelle de la masse suspendue demande un grand amortissement, - Dans les moyennes et les hautes fréquences, un faible amortissement serait nécessaire.
Wong: Fig 7.11 : Fonction de transfert
pour la masse suspendue

21
Modèle à 2 ddl: Critère de débattement de la suspension
Effet de la masse non-suspendue
Conclusion: une petite masse de train roulant (masse non-suspendue) est meilleure pour réduire les débattements de la suspension, même s’il y a une pénalité dans les hautes fréquences
Wong: Fig 7.12 Débattement de
suspension
Modèle à 2 ddl: Critère de débattement de la suspension
Effet de la raideur de la suspension
Conclusion:Sous la fréquence naturelle de la masse suspendue, une suspension raide (ktr/ks faible) diminue les débattementsPour les fréquencesintermédiaires, existence d’une fréquence de croisement : en dessous, meilleur d’avoir une suspension souple, au-delàmeilleur de durcir la suspensionAux hautes fréquences, la raideur a relativement peu d’effet
Wong: Fig 7.13Débattement de
suspension

22
Modèle à 2 ddl: Critère de débattement de la suspension
Effet de l’amortissement
Conclusion: pour réduire le débattement de la suspension, il est toujours meilleur d’avoir un grand amortissement
Wong: Fig 7.14Débattement de suspension
Modèle à 2 ddl: Critère d’adhérence
Effet de la masse non-suspendue
Conclusion: une faible massenon-suspendue réduit la déflexion dynamique du pneu
Attention: le pneu décolle du sol si la déflexion dynamique dépasse l’écrasement statique de la suspension
Wong: Fig 7.15 Déflexion
dynamique du pneu

23
Modèle à 2 ddl: Critère d’adhérence
Effet de la raideur de la suspension
Conclusion: Entre la fréquence propre de la masse suspendue et la fréquence de croisement, une suspension souple (ktr/ks grand) réduit les déflexions du pneu. Au delà de la fréquence de croisement, autour de la fréquence propre de la masse non suspendue, une suspension raide (ktr/ks faible) diminue la déflexion du pneu et améliore la tenue de route
Une forte raideur est meilleure pour la tenue de route, alors que l’isolation des vibration demande l’inverse
Wong: Fig 7.16 Déflexion dynamique
du pneu
Modèle à 2 ddl: Critère d’adhérence
Effet de l’amortissement
Conclusion: pour réduire la déflexion dynamique autour des fréquences naturelles, il faut un grand amortissement. Cela pénalise cependant les performances dans les fréquences intermédiaires
Wong: Fig 7.17 Déflexion dynamique
du pneu

24
Modèle à 2 ddl pour les masses suspendues et non suspendues
Masse non suspendue / masse suspendue:Dans tous les cas, il est préférable que la masse non suspendue soit faible (mus < ms/10)
Raideur des ressorts de suspensionPour l’isolation des vibrations : suspension souplePour la réduire le débattement : suspension souple aux basses fréquences et raide aux hautes fréquencesPour augmenter la tenue de route: suspension raideConclusion: suspension souple = confort privilégié, suspension raide = tenue de route privilégiée
Amortissement:Ni trop grand ni trop faible pour avoir un bon confort et une bonne tenue de route à toutes fréquences (ζ entre 0.2 et 0.4)
Modèle tangage pompage

25
Fréquences de pompage et de tangage
L’ajustement des fréquences de pompage et de tangage a un effet direct sur l’acceptabilité de la tenue de route.Sur la plupart des véhicules, les mouvements de tangage et de pompage sont couplés. Il n’y a pas de mouvement de pompage pur ou de tangage pur.Le comportement en termes de fréquences de pompage / tangage et de centre de mouvement peut être facilement extrait d’un modèle simple à 2 degrés de liberté.
Modèle à 2 ddl pour le tangage et le pompage
Modèle à 2 ddlRaideur de suspension et des pneus considérées ensemblesAmortissement de suspension et des pneus négligéesMasse non suspendue négligée
Equations du mouvement
m s Ä z + k f ( z ¡ l f µ ¡ z f ) + k r ( z + l r µ ¡ z r) = 0
I y Ä µ ¡ k f l f ( z ¡ l f µ ¡ z f ) + k r l r ( z + l r µ ¡ z r) = 0

26
Modèle à 2 ddl pour le tangage et le pompage
Posons
Les équations s’écrivent
I y = m s r 2
y
D 1 = 1
m s ( k f + k r )
D 2 = 1
m s
( k r l r ¡ k f l f )
D 3 = 1
I y ( k f l
2 f + k r l
2 r ) =
1
m s r 2 y
( k f l 2 f + k r l
2 r )
Ä z + D 1 z + D 2 µ = 0
Ä µ + D 3 µ +
D 2
r 2
y
z = 0
Modèle à 2 ddl pour le tangage et le pompage
Les équations deviennent découplées si
On a alors les 2 fréquences propres naturelles en pompage et en tangage découplées
D 2 = 0 , k f l f = k r l r
! n ; z =
p
D 1 =
r
k f + k r
m s
! n ; µ =
p
D 3 =
s
k f l 2
f + k r l 2
r
I y
27
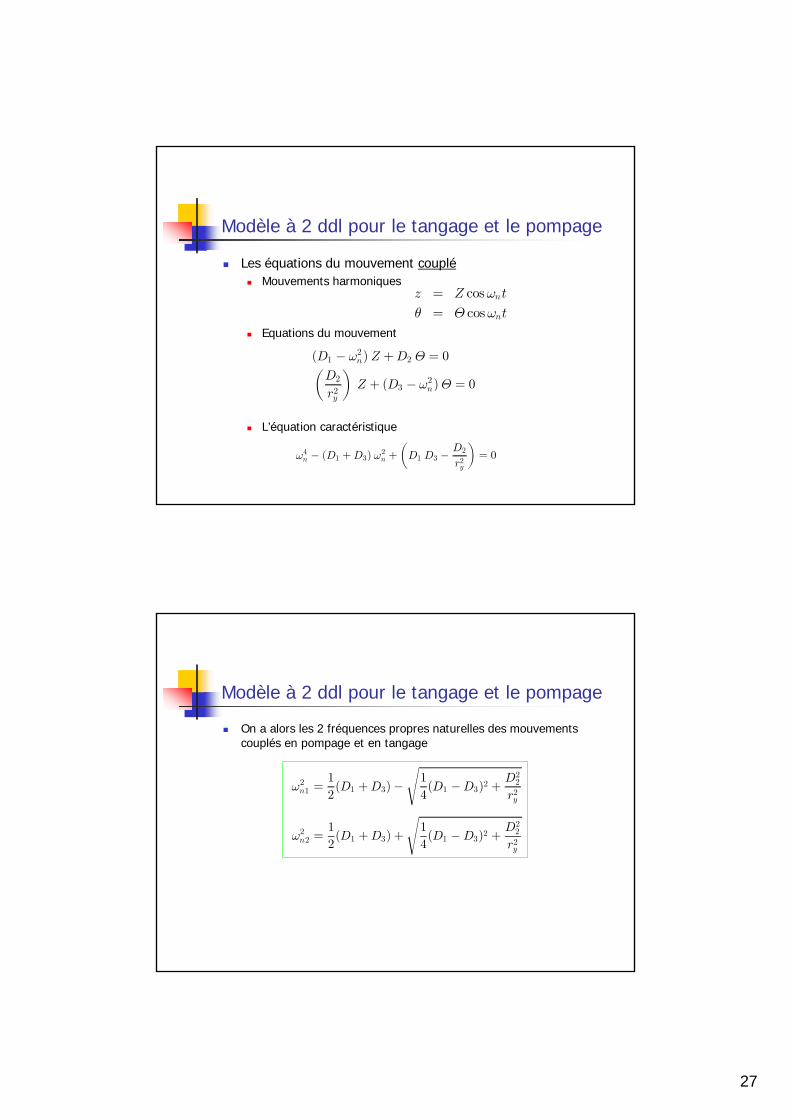
Modèle à 2 ddl pour le tangage et le pompage
Les équations du mouvement coupléMouvements harmoniques
Equations du mouvement
L’équation caractéristique
z = Z c o s ! n t
µ = £ c o s ! n t
( D 1 ¡ ! 2
n ) Z + D 2 £ = 0 µ
D 2
r 2 y
¶
Z + ( D 3 ¡ ! 2
n ) £ = 0
! 4 n ¡ ( D 1 + D 3 ) !
2 n +
µ
D 1 D 3 ¡ D 2
r 2 y
¶
= 0
Modèle à 2 ddl pour le tangage et le pompage
On a alors les 2 fréquences propres naturelles des mouvements couplés en pompage et en tangage
!2n1 =1
2(D1 +D3)¡
s1
4(D1 ¡D3)2 +
D22
r2y
!2n2 =1
2(D1 +D3) +
s1
4(D1 ¡D3)2 +
D22
r2y

28
Modèle à 2 ddl pour le tangage et le pompage
On définit aussi le ratio entre les amplitudes des mouvements de pompage et de tangage
Et le concept de centre d’oscillation
Z
£
¯ ¯ ¯ ¯
! n 1
=
D 2
! 2
n 1 ¡ D 1
Z
£
¯ ¯ ¯ ¯
! n 2
=
D 2
! 2
n 2 ¡ D 1
l01 =D2
!2n1 ¡D1
l 0 2 =
D 2
! 2
n 2 ¡ D 1
Modèle à 2 ddl pour le tangage et le pompage
Exercice:ms = 2120 kg ry = 1.33 mlf = 1.267 m lr = 1.548 mkf = 35 kN/m kr = 38 kN/m
Solution:D1 = 34.43 s-2 D2= 6.83 ms-2 D3= 39.26 s-2
ωn1² = 31.17 s-1, fn1 = 0.89 Hzωn2² = 42.52 s-1 fn2 = 1.04 Hz
l01 = -2.09 m l02 = +0.84 m

29
Fréquences de pompage et de tangage
Dès 1930, Maurice Olley, un pionnier de la dynamique des véhicules automobiles modernes, a émis 4 recommandations pour concevoir des voitures avec un bon confort et une bonne tenue de route (tout au moins pour les basses fréquences).Celles-ci proviennent de l’expérimentation sur une voiture àinertie giratoire variable.Elles restent aujourd’hui des règles de bonne pratique pour concevoir des voitures modernes.
Fréquences de pompage et de tangage
Règle 1: La suspension avant doit avoir une raideur (taux de tenue de route) 30% plus faible que la suspension arrière, autrement dit le centre de raideur doit être au moins à 6,5% de l’empattement derrière le CG.
Ne donne pas les fréquences propres des suspensions, car distribution des masses entre avant et arrière est proche de 50-50, mais dit que la suspension arrière doit être plus raide que l’avant
Règle 2: Les fréquences de pompage et de tangage doivent être proches l’une de l’autre. La fréquence de pompage doit être inférieure à 1.2 fois la fréquence de tangage. Pour des plus hauts rapports, il y a des saccades d’interférences résultants de la superposition des deux mouvements
Généralement réalisé sur les voitures modernes

30
Fréquences de pompage et de tangage
Règle 3: Aucune fréquence ne doit être plus grande que 1.3 Hz, ce qui signifie que la déflexion statique effective du véhicule ne doit pas dépasser 6 pouces
Règle 4: La fréquence de roulis devrait être approximativement égale aux fréquences de tangage et de pompage.
Généralement réalisé sur les voitures modernes
Fréquences de pompage et de tangage
Dans les années 1930, Maurice Olley avec sa théorie du filtrage dû à l’empattement procède de l’idée que le confort est lié àune évolution « à plat ».Considérons le cas d’un véhicule traversant une route à profil sinusoïdaleCertaines fréquences produisent des excitations verticales ou de tangage importantes.Les courbes de réponses fréquentielles tendent à être dessinées par les fréquences de filtrage de la réponse fréquentielle

31
Fréquences de pompage et de tangage
Fréquences de pompage et de tangage
Un véhicule passe sur un casse-vitesse, il y a un délai entre les sollicitations sur les trains avant et arrière.Si la suspension avant est plus souple que la suspension arrière, on assiste à un phénomène de battement qui a tendance àdiminuer le mouvement de tangage.

32
Fréquences de pompage et de tangage
L’idée intuitive de M. Olley est partiellement vérifiée sur les véhicules modernes, car:
La théorie ne marche que pour une vitesse particulièreSignificatif pour les USA: 55 mph, voitures avec faible amortissement en tangage, routes avec des excitations discrètesPeu significatif en Europe
OrL’effet de mouvement global n’est pas toujours significatif pour le véhiculeL’excitation venant de la route contient plusieurs fréquences et la vitesse du véhicule varieLes modes du véhicules sont couplés de sorte que les modes de pompage et de tangage sont mutuellement excités
The end…

33
Bonnes fêtes de Noël à tousBonne année 2010
Merci pour l’attention