Chapter 4 SFD and BMD
39
Chapter-4 Bending Moment and Shear force diagram Page- 1 4. Bending Moment and Shear Force Diagram Theory at a Glance (for IES, GATE, PSU) 4.1 Shear Force and Bending Moment At first we try to understand what shear force is and what is mending moment? We will not introduce any other co-ordinate system. We use general co-ordinate axis as shown in the figure. This system will be followed in shear force and bending moment diagram and in deflection of beam. Here downward direction will be negative i.e. negative Y-axis. Therefore downward deflection of the beam will be treated as negative. We use above Co-ordinate system Some books fix a co-ordinate axis as shown in the following figure. Here downward direction will be positive i.e. positive Y- axis. Therefore downward deflection of the beam will be treated as positive. As beam is generally deflected in downward directions and this co-ordinate system treats downward deflection is positive deflection. Some books use above co-ordinate system Consider a cantilever beam as shown subjected to external load ‘P’. If we imagine this beam to be cut by a section X-X, we see that the applied force tend to displace the left-hand portion of the beam relative to the right hand portion, which is fixed in the wall. This tendency is resisted by internal forces between the two parts of the beam. At the cut section a resistance shear force (V x ) and a bending moment (M x ) is induced. This resistance shear force and the bending moment at the cut section is shown in the left hand and right hand portion of the cut beam. Using the three equations of equilibrium
-
Upload
venkatesh-kakhandiki -
Category
Documents
-
view
265 -
download
15
description
SFD BMD
Transcript of Chapter 4 SFD and BMD

Chapter-4 Bending Moment and Shear force diagram Page-
1
4.
Bending Moment and Shear Force Diagram Theory at a Glance (for IES, GATE, PSU)
4.1 Shear Force and Bending Moment
At first we try to understand what shear force is and what is mending moment? We will not introduce any other co-ordinate system. We use general co-ordinate axis as shown in the figure. This system will be followed in shear force and bending moment diagram and in deflection of beam. Here downward direction will be negative i.e. negative Y-axis. Therefore downward deflection of the beam will be treated as negative.
We use above Co-ordinate system
Some books fix a co-ordinate axis as shown in the following figure. Here downward direction will be positive i.e. positive Y-axis. Therefore downward deflection of the beam will be treated as positive. As beam is generally deflected in downward directions and this co-ordinate system treats downward deflection is positive deflection.
Some books use above co-ordinate system
Consider a cantilever beam as shown subjected to external load ‘P’. If we imagine this beam to be cut by a section X-X, we see that the applied force tend to displace the left-hand portion of the beam relative to the right hand portion, which is fixed in the wall. This tendency is resisted by internal forces between the two parts of the beam. At the cut section a resistance shear force (Vx) and a bending moment (Mx) is induced. This resistance shear force and the bending moment at the cut section is shown in the left hand and right hand portion of the cut beam. Using the three equations of equilibrium

Chapter-4 Bending Moment and Shear force diagram Page-
2
0 , 0 0x y iF F and M= = =∑ ∑ ∑
We find that xV P= − and .xM P x= −
In this chapter we want to show pictorially the variation of shear force and bending moment in a beam as a function of ‘x' measured from one end of the beam.
Shear Force (V) ≡ equal in magnitude but opposite in
direction to the algebraic sum (resultant) of the components
in the direction perpendicular to the axis of the beam of all
external loads and support reactions acting on either side of
the section being considered.
Bending Moment (M) ≡ equal in magnitude but
opposite in direction to the algebraic sum of the moments
about (the centroid of the cross section of the beam) the
section of all external loads and support reactions acting on
either side of the section being considered.
What are the benefits of drawing shear force and bending moment diagram? The benefits of drawing a variation of shear force and bending moment in a beam as a function of ‘x' measured from one end of the beam is that it becomes easier to determine the maximum absolute value of shear force and bending moment. The shear force and bending moment diagram gives a clear picture in our mind about the variation of SF and BM throughout the entire section of the beam. Further, the determination of value of bending moment as a function of ‘x' becomes very important so as to determine
the value of deflection of beam subjected to a given loading where we will use the formula, 2
2 xd yEI Mdx
= .
4.2 Notation and sign convention
• Shear force (V) Positive Shear Force
A shearing force having a downward direction to the right hand side of a section or
upwards to the left hand of the section will be taken as ‘positive’. It is the usual sign

Chapter-4 Bending Moment and Shear force diagram Page-
3
conventions to be followed for the shear force. In some book followed totally opposite
sign convention.
The upward direction shearing force which is on the left hand of the section XX is positive shear force.
The downward direction shearing force which is on the right hand of the section XX is positive shear force.
Negative Shear Force
A shearing force having an upward direction to the right hand side of a section or
downwards to the left hand of the section will be taken as ‘negative’.
The downward direction shearing force which is on the left hand of the section XX is negative shear force.
The upward direction shearing force which is on the right hand of the section XX is negative shear force.
• Bending Moment (M) Positive Bending Moment

Chapter-4 Bending Moment and Shear force diagram Page-
4
A bending moment causing concavity upwards will be taken as ‘positive’ and called as
sagging bending moment.
Sagging
If the bending moment of the left hand of the section XX is clockwise then it is a positive bending moment.
If the bending moment of the right hand of the section XX is anti-clockwise then it is a positive bending moment.
A bending moment causing concavity upwards will be taken as ‘positive’ and called as sagging bending moment.
Negative Bending Moment
Hogging
If the bending moment of the left hand of the section XX is anti-clockwise then it is a positive bending moment.
If the bending moment of the right hand of the section XX is clockwise then it is a positive bending moment.
A bending moment causing convexity upwards will be taken as ‘negative’ and called as hogging bending moment.
Way to remember sign convention
• Remember in the Cantilever beam both Shear force and BM are negative (–ive).
4.3 Relation between S.F (Vx), B.M. (Mx) & Load (w)

Chapter-4 Bending Moment and Shear force diagram Page-
5
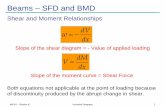
• xdV = -w (load)dx
The value of the distributed load at any point in the beam is
equal to the slope of the shear force curve. (Note that the sign of this rule may change
depending on the sign convention used for the external distributed load).
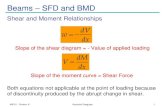
• xx
dM = Vdx
The value of the shear force at any point in the beam is equal to the
slope of the bending moment curve.
4.4 Procedure for drawing shear force and bending moment diagram Construction of shear force diagram
• From the loading diagram of the beam constructed shear force diagram.
• First determine the reactions.
• Then the vertical components of forces and reactions are successively summed from the
left end of the beam to preserve the mathematical sign conventions adopted. The shear
at a section is simply equal to the sum of all the vertical forces to the left of the section.
• The shear force curve is continuous unless there is a point force on the beam. The curve
then “jumps” by the magnitude of the point force (+ for upward force).
• When the successive summation process is used, the shear force diagram should end
up with the previously calculated shear (reaction at right end of the beam). No shear
force acts through the beam just beyond the last vertical force or reaction. If the shear
force diagram closes in this fashion, then it gives an important check on mathematical
calculations. i.e. The shear force will be zero at each end of the beam unless a point
force is applied at the end.
Construction of bending moment diagram
• The bending moment diagram is obtained by proceeding continuously along the length
of beam from the left hand end and summing up the areas of shear force diagrams using
proper sign convention.
• The process of obtaining the moment diagram from the shear force diagram by
summation is exactly the same as that for drawing shear force diagram from load
diagram.

Chapter-4 Bending Moment and Shear force diagram Page-
6
• The bending moment curve is continuous unless there is a point moment on the beam.
The curve then “jumps” by the magnitude of the point moment (+ for CW moment).
• We know that a constant shear force produces a uniform change in the bending
moment, resulting in straight line in the moment diagram. If no shear force exists along a
certain portion of a beam, then it indicates that there is no change in moment takes
place. We also know that dM/dx= Vx therefore, from the fundamental theorem of calculus
the maximum or minimum moment occurs where the shear is zero.
• The bending moment will be zero at each free or pinned end of the beam. If the end is
built in, the moment computed by the summation must be equal to the one calculated
initially for the reaction.
4.5 Different types of Loading and their S.F & B.M Diagram
(i) A Cantilever beam with a concentrated load ‘P’ at its free end.
Shear force: At a section a distance x from free end consider the forces
to the left, then (Vx) = - P (for all values of x) negative in
sign i.e. the shear force to the left of the x-section are in
downward direction and therefore negative.
Bending Moment: Taking moments about the section gives (obviously to the
left of the section) Mx = -P.x (negative sign means that the
moment on the left hand side of the portion is in the
anticlockwise direction and is therefore taken as negative
according to the sign convention) so that the maximum
bending moment occurs at the fixed end i.e. Mmax = - PL (
at x = L)
S.F and B.M diagram
(ii) A Cantilever beam with uniformly distributed load over the whole length

Chapter-4 Bending Moment and Shear force diagram Page-
7
When a cantilever beam is subjected to a uniformly
distributed load whose intensity is given w /unit length.
Shear force: Consider any cross-section XX which is at a distance of x
from the free end. If we just take the resultant of all the
forces on the left of the X-section, then
Vx = -w.x for all values of ‘x'.
At x = 0, Vx = 0
At x = L, Vx = -wL (i.e. Maximum at fixed end)
Plotting the equation Vx = -w.x, we get a straight line
because it is a equation of a straight line y (Vx) = m(- w) .x
Bending Moment: Bending Moment at XX is obtained by treating the load to
the left of XX as a concentrated load of the same value
(w.x) acting through the centre of gravity at x/2.
S.F and B.M diagram
Therefore, the bending moment at any cross-section XX is
( )2.. .
2 2xx w xM w x= − = −
Therefore the variation of bending moment is according to parabolic law.
The extreme values of B.M would be
at x = 0, Mx = 0
and x = L, Mx = 2
2wL
−
Maximum bending moment,
2
maxwL2
M = at fixed end
Another way to describe a cantilever beam with uniformly distributed load (UDL) over it’s whole
length.
(iii) A Cantilever beam loaded as shown below draw its S.F and B.M diagram

Chapter-4 Bending Moment and Shear force diagram Page-
8
In the region 0 < x < a Following the same rule as followed previously, we get
x xV =- P; and M = - P.x
In the region a < x < L
( )x xV =- P+P=0; and M = - P.x +P .x a P a− =
S.F and B.M diagram
(iv) Let us take an example: Consider a cantilever bean of 5 m length. It carries a uniformly
distributed load 3 KN/m and a concentrated load of 7 kN at the free end and 10 kN at 3 meters
from the fixed end.
Draw SF and BM diagram.
Answer: In the region 0 < x < 2 m Consider any cross section XX at a distance x from free
end.
Shear force (Vx) = -7- 3x
So, the variation of shear force is linear.
at x = 0, Vx = -7 kN
at x = 2 m , Vx = -7 - 3×2 = -13 kN
at point Z Vx = -7 -3×2-10 = -23 kN
Bending moment (Mx) = -7x - (3x). 2x 3x 7x
2 2= − −
So, the variation of bending force is parabolic.
at x = 0, Mx = 0
at x = 2 m, Mx = -7×2 – (3×2) × 22
= - 20 kNm

Chapter-4 Bending Moment and Shear force diagram Page-
9
In the region 2 m < x < 5 m Consider any cross section YY at a distance x from
free end
Shear force (Vx) = -7 - 3x – 10 = -17- 3x
So, the variation of shear force is linear.
at x = 2 m, Vx = - 23 kN
at x = 5 m, Vx = - 32 kN
Bending moment (Mx) = - 7x – (3x) x2
⎛ ⎞×⎜ ⎟⎝ ⎠
- 10 (x - 2)
23 x 17 202
x= − − +
So, the variation of bending force is parabolic.
at x = 2 m, Mx 23 2 17 2 202
= − × − × + = - 20 kNm
at x = 5 m, Mx = - 102.5 kNm

Chapter-4 Bending Moment and Shear force diagram Page-
10
(v) A Cantilever beam carrying uniformly varying load from zero at free end and w/unit length at the fixed end
Consider any cross-section XX which is at a distance of x from the free end.
At this point load (wx) = w .xL
Therefore total load (W) L L
x0 0
wLw dx .xdx = L 2w
= =∫ ∫
( )2
max
area of ABC (load triangle)
1 w wx . x .x2 2L
The shear force variation is parabolic.at x = 0, V 0
WL WLat x = L, V i.e. Maximum Shear force (V ) at fi2
Shear force V
2
x
x
x
L
=
⎛ ⎞= − = −⎜ ⎟⎝ ⎠
∴=
−= − = xed end
( )2 3
2 2
max
load distance from centroid of triangle ABC
wx 2x wx.2L 3 6L
The bending moment variation is cubic.at x= 0, M 0
wL wLat x = L, M i.e. Maximum Be
Be
nding moment (M ) a
nding moment M
t fi6 6
x
x
x
= ×
⎛ ⎞= − = −⎜ ⎟⎝ ⎠
∴=
= − = xed end.

Chapter-4 Bending Moment and Shear force diagram Page-
11
( )( )x
Integration method
d V wWe know that load .xdx L
wor d(V ) .x .
Alternative wa
L
y
dx
:
x
= − = −
= −
( )V x
0 02
Integrating both side
wd V . x .dxL
w xor V .L 2
x
x
x
= −
= −
∫ ∫
( )
( )
2x
x
2
x
Again we know thatd M wx V -
dx 2Lwxor d M - dx2L
= =
=
( )x
M 2
x0 0
3 3
x
Integrating both side we get at x=0,M =0
wxd(M ) .dx2L
w x wxor M - × -2L 3 6L
x x
= −
= =
∫ ∫

Chapter-4 Bending Moment and Shear force diagram Page-
12
(vi) A Cantilever beam carrying gradually varying load from zero at fixed end and w/unit length at the free end
Considering equilibrium we get, ( )2
A AwL wLM and Reaction R3 2
= =
Considering any cross-section XX which is at a distance of x from the fixed end.
At this point load W(W ) .xLx =
Shear force ( ) AR area of triangle A MV Nx = −
2
x max
x
wL 1 w wL wx- . .x .x = + - 2 2 L 2 2L
The shear force variation is parabolic.wL wLat x 0, V i.e. Maximum shear force, V2 2
at x L, V 0
⎛ ⎞= ⎜ ⎟⎝ ⎠
∴
= = + = +
= =
Bending moment ( )2
A AxM wx 2x=R .x - . - M2L 3
( )
3 2
2 2
max
x
wL wx wL= .x - - 2 6L 3
The bending moment variation is cubicwL wLat x = 0, M i.e.Maximum B.M. M .3 3
at x L, M 0
x
∴
= − = −
= =

Chapter-4 Bending Moment and Shear force diagram Page-
13
(vii) A Cantilever beam carrying a moment M at free end
Consider any cross-section XX which is at a distance of x from the free end.
Shear force: Vx = 0 at any point.
Bending moment (Mx) = - M at any point, i.e. Bending moment is constant throughout the
length.

Chapter-4 Bending Moment and Shear force diagram Page-
14
(viii) A Simply supported beam with a concentrated load ‘P’ at its mid span.
Considering equilibrium we get, A BPR = R = 2
Now consider any cross-section XX which is at a distance of x from left end A and section YY at
a distance from left end A, as shown in figure below.
Shear force: In the region 0 < x < L/2 Vx = RA = + P/2 (it is constant)
In the region L/2 < x < L
Vx = RA – P =2P - P = - P/2 (it is constant)
Bending moment: In the region 0 < x < L/2
Mx = P2
.x (its variation is linear)
at x = 0, Mx = 0
at x = L/2 Mx =PL4
i.e. maximum
Maximum bending moment, maxPL4
M = at x = L/2 (at mid-point)
In the region L/2 < x < L
Mx = 2P .x – P(x - L/2)
= PL2
−P2
.x (its variation is linear)
at x = L/2 , Mx =PL4
at x = L, Mx = 0

Chapter-4 Bending Moment and Shear force diagram Page-
15
(ix) A Simply supported beam with a concentrated load ‘P’ is not at its mid span.
Considering equilibrium we get, RA = BPb Paand R =L L
Now consider any cross-section XX which is at a distance x from left end A and another section
YY at a distance x from end A as shown in figure below.
Shear force: In the range 0 < x < a
Vx = RA = + PbL
(it is constant)
In the range a < x < L
Vx = RA - P = - PaL
(it is constant)
Bending moment: In the range 0 < x < a
Mx = +RA.x = PbL
.x (it is variation is linear)
at x = 0, Mx = 0
at x = a, Mx =Pab
L (i.e. maximum)

Chapter-4 Bending Moment and Shear force diagram Page-
16
In the range a < x < L Mx = RA.x – P(x- a)
= PbL
.x – P.x + Pa (Put b = L - a)
= Pa (1 - x1L
Pa ⎛ ⎞−⎜ ⎟⎝ ⎠
)
at x = a, Mx = PabL
at x = L, Mx = 0
(x) A Simply supported beam with two concentrated load ‘P’ from a distance ‘a’ both end. The loading is shown below diagram
Take a section at a distance x from the left support. This section is applicable for any value of x
just to the left of the applied force P. The shear, remains constant and is +P. The bending
moment varies linearly from the support, reaching a maximum of +Pa.

Chapter-4 Bending Moment and Shear force diagram Page-
17
A section applicable anywhere between the two applied forces. Shear force is not necessary to
maintain equilibrium of a segment in this part of the beam. Only a constant bending moment of
+Pa must be resisted by the beam in this zone.
Such a state of bending or flexure is called pure bending. Shear and bending-moment diagrams for this loading condition are shown below.
(xi) A Simply supported beam with a uniformly distributed load (UDL) through out its length
We will solve this problem by following two alternative ways.
(a) By Method of Section
Considering equilibrium we get RA = RB = wL2
Now Consider any cross-section XX which is at a distance x from left end A.

Chapter-4 Bending Moment and Shear force diagram Page-
18
Then the section view
Shear force: Vx = wL wx2
−
(i.e. S.F. variation is linear)
at x = 0, Vx = wL2
at x = L/2, Vx = 0
at x = L, Vx = - wL2
Bending moment: 2
.2 2x
wL wxM x= −
(i.e. B.M. variation is parabolic)
at x = 0, Mx = 0
at x = L, Mx = 0
Now we have to determine maximum bending
moment and its position.
For maximum B.M: ( ) ( )
0 . . 0x xx x
d M d Mi e V V
dx dx⎡ ⎤
= = =⎢ ⎥⎣ ⎦∵
or 02 2
wL Lwx or x− = =
Therefore Maximum bending moment,
2
max 8wLM = at x = L/2
(a) By Method of Integration Shear force:
We know that, ( )xd V
wdx
= −
( )xor d V wdx= −

Chapter-4 Bending Moment and Shear force diagram Page-
19
Integrating both side we get (at x =0, Vx = 2wL )
( )0
2
2
2
xV x
xwL
x
x
d V wdx
wLor V wx
wLor V wx
+
= −
− = −
= −
∫ ∫
Bending moment:
We know that, ( )x
x
d MV
dx=
( )2x x
wLor d M V dx wx dx⎛ ⎞= = −⎜ ⎟⎝ ⎠
Integrating both side we get (at x =0, Vx =0)
( )0
2
2
.2 2
xM x
xo
x
wLd M wx dx
wL wxor M x
⎛ ⎞= −⎜ ⎟⎝ ⎠
= −
∫ ∫
Let us take an example: A loaded beam as shown below. Draw its S.F and B.M diagram.
Considering equilibrium we get
( )A
B
M 0 gives
- 200 4 2 3000 4 R 8 0R 1700NBor
=
× × − × + × =
=
∑
A B
A
R R 200 4 3000R 2100N
Andor
+ = × +
=

Chapter-4 Bending Moment and Shear force diagram Page-
20
Now consider any cross-section which is at a distance 'x' from left end A andas shown in figure
XX
In the region 0 < x < 4m
Shear force (Vx) = RA – 200x = 2100 – 200 x
Bending moment (Mx) = RA .x – 200 x . x2
⎛ ⎞⎜ ⎟⎝ ⎠
= 2100 x -100 x2
at x = 0, Vx = 2100 N, Mx = 0
at x = 4m, Vx = 1300 N, Mx = 6800 N.m
In the region 4 m < x < 8 m
Shear force (Vx) = RA - 200 ×4 – 3000 = -1700
Bending moment (Mx) = RA. x - 200×4 (x-2) – 3000 (x- 4)
= 2100 x – 800 x + 1600 – 3000x +12000 = 13600 -1700 x
at x = 4 m, Vx = -1700 N, Mx = 6800 Nm
at x = 8 m, Vx = -1700 N, Mx = 0

Chapter-4 Bending Moment and Shear force diagram Page-
21
(xii) A Simply supported beam with a gradually varying load (GVL) zero at one end and w/unit length at other span.
Consider equilibrium of the beam = 1 wL2
acting at a point C at a distance 2L/3 to the left end A.
B
A
A
BA
M 0 gives
wL LR .L - . 02 3wLor R6
wLSimilarly M 0 gives R3
=
=
=
= =
∑
∑
The free body diagram of section A - XX as shown below, Load at section XX, (wx) =w xL

Chapter-4 Bending Moment and Shear force diagram Page-
22
The resulted of that part of the distributed load which acts on this free body is
( )21 w wxx . x
2 L 2L= = applied at a point Z, distance x/3 from XX section.
Shear force (Vx) = 2 2
Awx wL wxR - - 2L 6 2L
=
Therefore the variation of shear force is parabolic
at x = 0, Vx = wL6
at x = L, Vx = - wL3
x
2 3wL wx x wL wxand .x . .x6 2
Bending ML 3 6
oment (M6L
) = − = −
The variation of BM is cubic
at x = 0, Mx = 0
at x = L, Mx = 0
For maximum BM; ( ) ( )x xx x
d M d M0 i.e. V 0 V
dx dx⎡ ⎤
= = =⎢ ⎥⎣ ⎦∵
2
3 2
max
wL wx Lor - 0 or x6 2L 3
wL L w L wLand M6 6L3 3 9 3
= =
⎛ ⎞ ⎛ ⎞= × − × =⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
i.e.
2
maxwLM9 3
= Lat x3
=

Chapter-4 Bending Moment and Shear force diagram Page-
23
(xiii) A Simply supported beam with a gradually varying load (GVL) zero at each end and w/unit length at mid span.
Consider equilibrium of the beam AB total load on the beam 1 L wL2 w2 2 2
⎛ ⎞= × × × =⎜ ⎟⎝ ⎠
A BwLTherefore R R4
= =
The free body diagram of section A –XX as shown below, load at section XX (wx) 2w .xL
=

Chapter-4 Bending Moment and Shear force diagram Page-
24
The resultant of that part of the distributed load which acts on this free body is
21 2w wx.x. .x2 L L
= = applied at a point, distance x/3 from section XX.
Shear force (Vx): In the region 0 < x < L/2
( )2 2
x Awx wL wxV RL 4 L
= − = −
Therefore the variation of shear force is parabolic.
at x = 0, Vx = wL4
at x = L/4, Vx = 0
In the region of L/2 < x < L The Diagram will be Mirror image of AC.
Bending moment (Mx): In the region 0 < x < L/2
( )3
xwL 1 2wx wL wxM .x .x. . x / 3 -4 2 L 4 3L
⎛ ⎞= − =⎜ ⎟⎝ ⎠
The variation of BM is cubic
at x = 0, Mx = 0
at x = L/2, Mx =2wL
12
In the region L/2 < x < L BM diagram will be mirror image of AC.
For maximum bending moment
( ) ( )x xx x
d M d M0 i.e. V 0 V
dx dx⎡ ⎤
= = =⎢ ⎥⎣ ⎦∵

Chapter-4 Bending Moment and Shear force diagram Page-
25
2
2
max
wL wx Lor - 0 or x4 L 2
wLand M12
= =
=
i.e.
2
maxwLM12
= Lat x2
=
(xiv) A Simply supported beam with a gradually varying load (GVL) zero at mid span and w/unit length at each end.
We now superimpose two beams as

Chapter-4 Bending Moment and Shear force diagram Page-
26
(1) Simply supported beam with a UDL
through at its length
( )
( )
x 1
2
x 1
wLV wx2wL wxM .x2 2
= −
= −
And (2) a simply supported beam with a gradually varying load (GVL) zero at each end and
w/unit length at mind span.
In the range 0 < x < L/2
( )
( )
2
x 2
3
x 2
wL wxV4 LwL wxM .x4 3L
= −
= −
Now superimposing we get
Shear force (Vx): In the region of 0< x < L/2
( ) ( )
( )
2
x x x1 2
2
wL wL wxV V V -wx -2 4 L
w x - L/2L
⎛ ⎞⎛ ⎞= − = − ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠
=
Therefore the variation of shear force is parabolic
at x = 0, Vx = + wL4
at x = L/2, Vx = 0
In the region L/2 < x < L The diagram will be mirror image of AC
Bending moment (Mx) = ( )x 1M - ( )x 2
M =
2 3
3 2
wL wx wL wx.x .x2 2 4 3L
wx wx wL .x3L 2 4
⎛ ⎞ ⎛ ⎞= − − −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
= − +
The variation of BM is cubic

Chapter-4 Bending Moment and Shear force diagram Page-
27
x2
x
at x 0, M 0
wxat x L / 2, M24
= =
= =
(xv) A simply supported beam with a gradually varying load (GVL) w1/unit length at one end and w2/unit length at other end.
At first we will treat this problem by considering a UDL of identifying (w1)/unit length over the
whole length and a varying load of zero at one end to (w2- w1)/unit length at the other end. Then
superimpose the two loadings.
Consider a section XX at a distance x from left end A

Chapter-4 Bending Moment and Shear force diagram Page-
28
(i) Simply supported beam with UDL (w1) over whole length
( )
( )
1x 11
21x 11
w LV w x2
w L 1M .x w x2 2
= −
= −
And (ii) simply supported beam with (GVL) zero at one end (w2- w1) at other end gives
( ) ( ) ( )
( ) ( ) ( )
22 1 2 1
2
32 1
2 12
6 2
. .6 6
x
x
w w w w xV
Lw w xLM w w x
L
− −= −
−= − −
Now superimposing we get
Shear force ( ) ( ) ( ) ( )2
1 2x x 1 2 11 2x
w L w L xV + V + w x w w3 6 2L
V = = − − −
The SF variation is parabolic∴
( )
( )
1 2x 1 2
x 1 2
w L w L Lat x 0, V 2w w3 6 6Lat x L, V w 2w6
= = + = +
= = − +
Bending moment ( ) ( ) ( ) 2 31 1 2 1x x 11 2x
w L w L w -w1M M .x .x w x .x3 6 2 6
ML
⎛ ⎞= + = + − − ⎜ ⎟⎝ ⎠
The BM variation is cubic.∴
x
x
at x 0, M 0at x L, M 0
= =
= =

Chapter-4 Bending Moment and Shear force diagram Page-
29
(xvi) A Simply supported beam carrying a continuously distributed load. The intensity of
the load at any point is, sinxxw w
Lπ⎛ ⎞= ⎜ ⎟⎝ ⎠
. Where ‘x’ is the distance from each end of the
beam.
We will use Integration method as it is easier in this case.
We know that ( ) ( )x x
x
d V d Mload and V
dx dx= =

Chapter-4 Bending Moment and Shear force diagram Page-
30
( )
( )
( )
[ ]
x
x
x
x
d VTherefore sin
dx L
d V sin dxL
Integrating both side we getxd V w sin dx
Lxw cos
wL xLor V A cosL
Lwhere, constant of Integration
xw
xw
A
A
π
π
π
ππ
π π
⎛ ⎞= − ⎜ ⎟⎝ ⎠⎛ ⎞= − ⎜ ⎟⎝ ⎠
⎛ ⎞= − ⎜ ⎟⎝ ⎠
⎛ ⎞⎜ ⎟ ⎛ ⎞⎝ ⎠= + + = + +⎜ ⎟
⎝ ⎠
=
∫ ∫
( )
( )
xx
x x
2
x 2
Again we know thatd M
Vdx
wL xor d M V dx cos dxL
Integrating both side we getwL xsin
wL xLM x + B sin x + BL
L
A
A A
ππ
πππ
π π
=
⎧ ⎫⎛ ⎞= = +⎨ ⎬⎜ ⎟⎝ ⎠⎩ ⎭
⎛ ⎞⎜ ⎟ ⎛ ⎞⎝ ⎠= + = +⎜ ⎟
⎝ ⎠
[Where B = constant of Integration]
Now apply boundary conditions
At x = 0, Mx = 0
and at x = L, Mx = 0
This gives A = 0 and B = 0
( )x max
2
x 2
2
max 2
wL x wL Shear force V cos and V at x 0L
wL xAnd M sinL
wLM at x = L/2
ππ π
ππ
π
⎛ ⎞∴ = = =⎜ ⎟⎝ ⎠
⎛ ⎞= ⎜ ⎟⎝ ⎠
∴ =

Chapter-4 Bending Moment and Shear force diagram Page-
31
(xvii) A Simply supported beam with a couple or moment at a distance ‘a’ from left end.
Considering equilibrium we get
A
B B
B
A A
M 0 givesMR ×L+M 0 RL
and M 0 givesMR ×L+M 0 RL
or
or
=
= = −
=
− = =
∑
∑
Now consider any cross-section XX which is at a distance ‘x’ from left end A and another
section YY at a distance ‘x’ from left end A as shown in figure.
In the region 0 < x < a

Chapter-4 Bending Moment and Shear force diagram Page-
32
Shear force (Vx) = RA = ML
Bending moment (Mx) = RA.x = ML
.x
In the region a< x < L
Shear force (Vx) = RA = ML
Bending moment (Mx) = RA.x – M = ML
.x - M
(xviii) A Simply supported beam with an eccentric load
When the beam is subjected to an eccentric load, the eccentric load is to be changed into a
couple = Force× (distance travel by force)
= P.a (in this case) and a force = P

Chapter-4 Bending Moment and Shear force diagram Page-
33
Therefore equivalent load diagram will be
Considering equilibrium
AM 0 gives=∑ -P.(L/2) + P.a + RB ×L = 0
or RB = P P.a2 L−
and RA + RB = P gives RA = P P.a2 L+
Now consider any cross-section XX which is at a distance ‘x’ from left end A and
another section YY at a distance ‘x’ from left end A as shown in figure.
In the region 0 < x < L/2
Shear force (Vx) =P P.a2 L+
Bending moment (Mx) = RA . x = P Pa2 L
⎛ ⎞+⎜ ⎟⎝ ⎠
. x
In the region L/2 < x < L
Shear force (Vx) =P Pa P PaP = -2 L 2 L+ − +
Bending moment (Vx) = RA . x – P.( x - L/2 ) – M
= PL P Pa .x - Pa2 2 L
⎛ ⎞− −⎜ ⎟⎝ ⎠

Chapter-4 Bending Moment and Shear force diagram Page-
34
4.6 Bending Moment diagram of Statically Indeterminate beam Beams for which reaction forces and internal forces cannot be found out from static equilibrium equations alone are called statically indeterminate beam. This type of beam requires deformation equation in addition to static equilibrium equations to solve for unknown forces. Statically determinate - Equilibrium conditions sufficient to compute reactions. Statically indeterminate - Deflections (Compatibility conditions) along with equilibrium equations should be used to find out reactions. Type of Loading & B.M Diagram Reaction Bending Moment
RA= RB = P2
MA = MB = PL-8
RA = RB =wL2
MA= MB =
2wL-12

Chapter-4 Bending Moment and Shear force diagram Page-
35
2
A 3
2
3
R (3 )
(3 )B
Pb a bL
PaR b aL
= +
= +
MA = -
2
2
PabL
−
MB = -2
2
Pa bL
−
RA= RB = 316wL
Rc = 58wL
R A RB
+--
4.7 Load and Bending Moment diagram from Shear Force diagram OR Load and Shear Force diagram from Bending Moment diagram
If S.F. Diagram for a beam is given, then
(i) If S.F. diagram consists of rectangle then the load will be point load
(ii) If S.F diagram consists of inclined line then the load will be UDL on that portion
(iii) If S.F diagram consists of parabolic curve then the load will be GVL

Chapter-4 Bending Moment and Shear force diagram Page-
36
(iv) If S.F diagram consists of cubic curve then the load distribute is parabolic.
After finding load diagram we can draw B.M diagram easily.
If B.M Diagram for a beam is given, then
(i) If B.M diagram consists of inclined line then the load will be free point load
(ii) If B.M diagram consists of parabolic curve then the load will be U.D.L.
(iii) If B.M diagram consists of cubic curve then the load will be G.V.L.
(iv) If B.M diagram consists of fourth degree polynomial then the load distribution is parabolic.
Let us take an example: Following is the S.F diagram of a beam is given. Find its loading diagram.
Answer: From A-E inclined straight line so load will be UDL and in AB = 2 m length load = 6 kN if UDL is w N/m then w.x = 6 or w×2 = 6 or w = 3 kN/m after that S.F is constant so no force is there. At last a 6 kN for vertical force complete the diagram then the load diagram will be
As there is no support at left end it must be a cantilever beam.

Chapter-4 Bending Moment and Shear force diagram Page-
37
4.8 Point of Contraflexure In a beam if the bending moment changes sign at a point, the point itself having zero bending
moment, the beam changes curvature at this point of zero bending moment and this point is
called the point of contra flexure.
Consider a loaded beam as shown below along with the B.M diagrams and deflection diagram.
In this diagram we noticed that for the beam loaded as in this case, the bending moment diagram is partly positive and partly negative. In the deflected shape of the beam just below the bending moment diagram shows that left hand side of the beam is ‘sagging' while the right hand side of the beam is ‘hogging’.
The point C on the beam where the curvature changes from sagging to hogging is a point of contraflexure.
• There can be more than one point of contraflexure in a beam.
4.9 General expression
• EI4
2 ω= −d ydx
• 3
3 xd yEI Vdx
=
• 2
2 xd yEI Mdx
=
• dy =θ=slopedx

Chapter-4 Bending Moment and Shear force diagram Page-
38
• y=δ = Deflection
• Flexural rigidity = EI

Chapter-16 Riveted and Welded Joint Page-
39