Chapter 11 Coherent and Incoherent Systems
68
Chapter 11 Coherent and Incoherent Systems Most large-aperture imaging systems are made of mirrors, instead of lenses, for many reasons. A single lens requires fabrication of two surfaces, may only be supported on the edges, and suffers from chromatic aberration (variation in image position with wavelength) due to the dispersion of the glass (the variation in the refractive index, and therefore of the focal length, with wavelength). Mirror systems do not suffer from chromatic effects, but may exhibit significant amounts of the five “monochromatic aberrations,” which are deviations from ideal imaging due to errors in the wavefront at the pupil. The five aberrations are: spher- ical aberration, coma, astigmatism, distortion, and curvature of field. The “sixth” monochromatic aberration, “piston error,” is present only in special cases, such as pupils composed of multiple elements (a “segmented” pupil). A system composed of a single curved mirror exhibits no chromatic aberration, because light of all wavelengths reflect identically, unlike transmissive lenses, where the focal length increases with increasing wavelength. But a mirror does exhibit monochromatic aberrations that differ with the shape of the mirror. We have already showed in Fig.(8.3) that a sphere is the easiest surface shape to fabricate, but it will focus rays of light from a distant object at different distances from the mirror surface, as shown in Fig.(11.1-a). This effect is called “spherical aberration.” A mirror with a paraboloidal surface has no spherical aberration for an object distance of ∞, but does suffer from coma and astigmatism. 11.1 Filled Circular Aperture We have already considered aspects of the most common imaging system with a lens system with a circular aperture with diameter 0 and specified focal ratio f 1 . The pupil function has the form: [ ]= ()= μ 0 ¶ (11.1) 371
Transcript of Chapter 11 Coherent and Incoherent Systems

Chapter 11
Coherent and Incoherent Systems
Most large-aperture imaging systems are made of mirrors, instead of lenses, for many
reasons. A single lens requires fabrication of two surfaces, may only be supported on
the edges, and suffers from chromatic aberration (variation in image position with
wavelength) due to the dispersion of the glass (the variation in the refractive index,
and therefore of the focal length, with wavelength).
Mirror systems do not suffer from chromatic effects, but may exhibit significant
amounts of the five “monochromatic aberrations,” which are deviations from ideal
imaging due to errors in the wavefront at the pupil. The five aberrations are: spher-
ical aberration, coma, astigmatism, distortion, and curvature of field. The “sixth”
monochromatic aberration, “piston error,” is present only in special cases, such as
pupils composed of multiple elements (a “segmented” pupil).
A system composed of a single curved mirror exhibits no chromatic aberration,
because light of all wavelengths reflect identically, unlike transmissive lenses, where
the focal length increases with increasing wavelength. But a mirror does exhibit
monochromatic aberrations that differ with the shape of the mirror. We have already
showed in Fig.(8.3) that a sphere is the easiest surface shape to fabricate, but it will
focus rays of light from a distant object at different distances from the mirror surface,
as shown in Fig.(11.1-a). This effect is called “spherical aberration.” A mirror with
a paraboloidal surface has no spherical aberration for an object distance of ∞, butdoes suffer from coma and astigmatism.
11.1 Filled Circular Aperture
We have already considered aspects of the most common imaging system with a lens
system with a circular aperture with diameter 0 and specified focal ratio f1. The
pupil function has the form:
[ ] = () =
µ
0
¶(11.1)
371

372 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.1: (a) Spherical aberration of spherical mirror acting on parallel rays from
distant object. Rays far from the axis are focused “closer” to the mirror, while paraxial
rays cross the axis at a larger distance f = 02; (b) Rays from a distant object incident
on a mirror with a concave paraboloidal surface all cross the axis of symmetry at the
same location. (http://boomeria.org/physicstextbook/ch13.html)
Eq.(9.31) shows that the coherent transfer function is proportional to a scaled replica
of the pupil:
[; 1 f1 2] ∝
µ−02
0
¶=
⎛⎝ ³002
´⎞⎠ ≡
µ
2 · max
¶(11.2)
This system transmits all spatial frequencies without change up to the cutoff frequency
max =0
202(11.3)
and thus acts as a lowpass filter that “blurs” the output image. Note that if imaging
objects located at large distances so that 1 À f1, then the image distance 2 ' f1,and the maximum spatial frequency passed by the system is:
max /0
20f1(11.4)
The impulse response of this coherent imaging system is a “sombrero” function: at
[; 1 f1 2] ∝ F−12
⎧⎨⎩
⎛⎝ h002
i⎞⎠⎫⎬⎭ ∝
⎛⎝ h020
i⎞⎠ (11.5)
The impulse response of the corresponding incoherent system with a circular pupil
is the squared magnitude of Eq.(11.5):

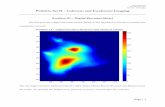
11.2 APERTURE + CENTRAL OBSCURATION (CASSEGRAIN) 373
h () ∝ 2
⎛⎝ h020
i⎞⎠→ 2
⎛⎝ h0f10
i⎞⎠ (11.6)
which is a well-known function in optical imaging. The central lobe of this pattern
is called the Airy disk with diameter approximately equal to 244 ·³0f10
´, which
decreases with increasing aperture diameter 0. In the last section, we considered
several criteria for image resolution/quality that are based on the diameter of the
Airy disk.
The transfer function of this circular pupil in incoherent light is a “circular tri-
angle,” which is the autocorrelation of the circular transfer function in the coherent
case:
H () ∝
µ02
0
¶F
µ02
0
¶
=
⎛⎝ h002
i⎞⎠ F
⎛⎝ h002
i⎞⎠ (11.7)
Note that since the autocorrelation of the circular pupil is twice as wide as the pupil
itself, the cutoff frequency in incoherent light (i.e., the spatial frequency closest to the
origin at which () = 0) is twice as large as the corresponding metric in coherent
light. However, the incoherent OTF drops from unity for all spatial frequencies larger
than zero, as shown in Fig.(11.2). The radial profiles of the two psfs are shown in
Fig.(11.3). Both the coherent and incoherent imaging systems with finite apertures
act as lowpass filters that blur the image.
11.2 Aperture +Central Obscuration (Cassegrain)
A very common optical system used to gather imagery at a distance is the Cassegrain
telescope, which cascades a large concave mirror (usually a paraboloid) with a smaller
convex mirror (usually hyperboloidal) to collect the radiation. The optical path of
a Cassegrain telescope is shown in Fig.(11.4) and has a longer focal length (often
MUCH longer) than the distance between the mirrors — the so-called “tube length.”
There are several variations of the curvatures of the two mirrors with this op-
tical train; they may be hyperbolic to improve image quality at the figurative and
literal expense of fabrication difficulty (Ritchey-Chrétien, used in the Hubble Space
Telescope, among others); a concave elliptical primary may be combined with a con-
vex spherical secondary for ease of manufacturing (Dall-Kirkham, which suffers from
significant coma). The secondary mirror often is supported by an optically flat “win-
dow” with no optical power that has the side benefit of “closing” the tube to dust,
at some cost in light-gathering power due to reflections from the two surfaces of the
window.

374 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.2: Pupil function of circular aperture [ ] = ¡
¢and its auto-
correlation, which are respectively proportional to the transfer function of the coher-
ent and incoherent imaging system with this pupil if the coordinates are mapped to
[ ] → [−2−2]. Both systems act as lowpass filters. The incoherent systempasses information with larger spatial frequencies, though with less modulation.

11.2 APERTURE + CENTRAL OBSCURATION (CASSEGRAIN) 375
Figure 11.3: Profiles of the normalized point spread functions of an optical imaging
system with a circular pupil of diameter : (a) coherent imaging; (b) incoherent
imaging.
In Cassegrain systems, the smaller mirror obstructs light from reaching the pri-
mary mirror, which means that the aperture function of a Cassegrain is the difference
of the two circular aperture functions:
() =
µ
1
¶−
µ
2
¶ 1 2 (11.8)
where 1 and 2 are the diameters of the concave primary and convex secondary mir-
rors, respectively. The coherent transfer function and impulse response are obtained
by direct substitution:
() =
µ0
1
¶−
µ0
2
¶
=
⎛⎝ ³10
´⎞⎠−
⎛⎝ ³20
´⎞⎠ (11.9)
() ∝
⎛⎝ ³01
´⎞⎠−µ2
1
¶2
⎛⎝ ³02
´⎞⎠ (11.10)
In coherent light, the centrally obscured system acts as a bandpass filter ; it passes
radial spatial frequencies to the output that satisfy the condition:
1
20
2
20

376 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.4: Optical layout of a Cassegrain imaging system consisting of circular
primary and secondary mirrors of diameter 1 and 2, respectively. The focal length
of the equivalent thin lens is much longer than the “tube length” between the primary
and secondary. The pupil function is () = ³
1
´−
³2
´.
The incoherent psf of the Cassegrain system is the squared magnitude of Eq.(11.10):
h () ∝¯̄̄̄¯
µ1
0
¶−µ2
1
¶2
µ2
0
¶¯̄̄̄¯2
(11.11)
Its psf falls off faster with increasing than for the filled aperture, so the incoherent
psf of an optical system with a central obscuration is “skinnier” than that of an equal-
diameter clear-aperture system. However, the first lobe of the psf is “brighter” for a
Cassegrain than for a clear-aperture system, as shown in the profiles in Fig.(11.5).
The normalized OTF of the Cassegrain system (identical to the MTF for this
unaberrated case) is the autocorrelation of the aperture function:
H () =
∙
µ0
1
¶−
µ0
2
¶¸F
∙
µ0
1
¶−
µ0
2
¶¸(11.12)
as shown in Figure (11.6) for the case where 1 = 2 · 2, so the area of the apertureof the Cassegrain is 3
4of the area of the unobscured aperture with diameter 1. The
profile of the MTF is shown in Figure (11.7), which shows a more rapid “falloff” of
the modulation for low frequencies ' 0, but larger values of the MTF for ' 07.This effect is due to the normalization by the pupil area when calculating the MTF;
because the area of the Cassegrain pupil is smaller, the MTF values are divided by
this smaller number, which results in a relative “amplification” of the MTF at large
spatial frequencies.
Diffraction-limited images of the point spread functions of the f/10 clear-aperture

11.3 NEWTONIAN TELESCOPE WITH MIRROR SUPPORT 377
Figure 11.5: Profiles of the normalized point spread functions of a Cassegrain optical
imaging system with primary diameter and secondary diameter 2, compared to the
profiles for the unobscured pupil (a) coherent imaging; (b) incoherent imaging. Note
the increase in amplitude of the first sidelobe for the Cassegrain compared to the full
pupil in the incoherent case.
and Cassegrain systems are compared in Figure (11.8), which shows the brighter
“rings” of the diffraction pattern for the Cassegrain system.
11.3 Newtonian Telescope with Mirror Support
The Newtonian telescope includes a concave reflective element and a secondary “flat”
that reflects the converging beam out of the telescope tube. The flat mirror merely
redirects the beam and has no impact on the image quality. Modern Newtonians
are (obviously) variants of the original design by Sir Isaac Newton from 1688. As is
the case for all single-mirror telescopes, Newtonians suffer from some aberration that
depend on the object distance. If the primary is spherical, the only object location
that will create an image without aberrations is at the center of curvature. If the
object is distant (as is the usual case), then light rays near the axis of symmetry will
cross the axis “farther” from the mirror than rays farther from the axis of symmetry.
As we shall soon see, this effect is characterized as a deviation from ideal behavior
called “spherical aberration.” By changing the surface shape to a paraboloid, rays
from a distant object parallel to the axis of symmetry will cross that axis at the
same “focal point,” so such a surface has no spherical aberration. However, rays from
distant off-axis objects do not form ideal images, but rather have the characteristic
“comet” shape that is evidence of the aberration of “coma.”
The flat mirror usually is supported in front of the primary mirror by some kind of
frame, often called a “spider,” which must of necessity block some light from reaching
the primary and therefore removes some of the pupil function. A schematic of the

378 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.6: Pupil function of Cassegrain imaging system: [ ] → () =
³
1
´−
³2
´, where 1 = 22 (50% obscuration). The incoherent transfer
function does not decay smoothly to zero with increasing =p2 + 2, but exhibits
a “shoulder” region where the modulation flattens out.

11.3 NEWTONIAN TELESCOPE WITH MIRROR SUPPORT 379
Figure 11.7: Comparison of MTF curves of f/10 mirror with 0 = 100mm with and
without 50% Cassegrain obstruction. The normalizatoin of the value at = 0 ensures
that the MTF of the Cassegrain is larger than that of the filled aperture near the cutoff
frequency.
Figure 11.8: Comparison of diffraction-limited images from system with unobscured
aperture and Cassegrain system with 50% obscuration, showing the brighter diffraction
“rings” in the latter system.

380 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.9: Optical path for Newtonian telescope, showing presence of “spider” to
hold the secondary mirror within the tube.
light path is shown in Fig.(11.9), and examples of pupil functions from three different
types of spider are shown in Fig.(11.10). The effect of the spider vanes (supports)
on the incoherent psf is fairly obvious, as the vanes diffract light orthogonal to their
narrow dimension to form diffraction “spikes” on images of point objects, such as
stars. Spiders are made from “vanes” or “stalks”: usually one, three, or four vanes
that respectively create one, six, or four diffraction “spikes” that are visible in images
of bright point objects, as shown in Fig.(11.10)
The mirror support adds diffraction “spikes” to images of the small bright objects
that are, after all, the stellar targets that are imaged by astronomical telescopes;
an example is shown in Fig.(11.11). The diffraction “spikes” may possibly obscure
fainter stars located along the direction of the diffracted light.
It is possible to minimize the visibility of the diffraction “spikes” by using a mir-
ror support with curved sides. Two examples are shown with calculated impulse
responses. Note that these still diffract light, but they spread it in a less structured
manner throughout the field and so may be less visible.
11.4 Multiaperture Systems (“Dilute” or “Sparse”
Apertures)
Optical systems may be constructed with multiple apertures that may be positioned at
regular spacings or “scattered” about in random patterns. For example, an opaque
stop with holes at the locations of the apertures creates a “sparse-” or “dilute-”
aperture system. One interesting potential bug/feature of a multiaperture system
is the possibility of changing the phase of one or more of the component apertures
relative to the others, with effect to be described shortly.
Two well-known examples are the “Very Large Array” (VLA) of radio telescopes
in NewMexico and what had been the “Multiple-Mirror Telescope” (MMT) on Mount
Hopkins near Tucson. The MMT originally had been composed of six 72"-diameter
(18m) mirrors arranged in a hexagon, but was been converted in 1998 to a single

11.4MULTIAPERTURE SYSTEMS (“DILUTE”OR “SPARSE”APERTURES)381
Figure 11.10: Three examples of pupils in Newtonian telescopes showing the additional
obscuration of the primary mirror by the “stalk” support (top left) and three- and four-
vane “spiders” (top center and right). Contrast-enhanced images of calcuated point
spread functions at the bottom exhibit diffraction “spikes” from the mirror supports.
Figure 11.11: Actual photographic image of star field through Newtonian telescope
showing diffraction “spikes” from the cross spider supports of the secondary mirror.

382 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
65m-diameter primary with a focal ratio of f/1.25 (a very “fast” system with focal
length f1primary ≈ 8125m). This mirror is combined with various secondaries thatproduce different focal ratios for the entire system, including wide-field systems at
f/9 and f/5, and an f/15 system with an adaptive-optics “rubber mirror” secondary
used at near-infrared wavelengths. The field of view of the f/5 system is one angular
degree (twice the diameter of the full moon); this is almost unbelievably wide for an
aperture with such a large diameter. Since the diameter of the primary is the same
for all secondaries, the systems with larger focal ratios have longer focal lengths.
In the general case, if the pupil of an optical imaging system is created by an array
of identical individual apertures, the mathematical expression for the pupil function
may be written as a convolution of the individual aperture function and an array
of Dirac delta functions that specify the centers of the locations of the individual
elements:
[ ] =
X=1
[− − ] = [ ] ∗X=1
[− − ] (11.13)
The corresponding coherent transfer function is proportional to this pupil function
after appropriate scaling to the frequency domain:
[ ] ∝ [−02−02] =X=1
∙−02
µ −
02
¶−02
µ −
02
¶¸
∝ [−02−02] ∗X=1
∙ +
02 +
02
¸(11.14)
The incoherent transfer function of the system with this pupil is the autocorrelation:
H [ ] = [ ]F [ ] ∝ [−02−02]F [−02−02]
= ( [−02−02]F [−02−02])
∗Ã
X=1
∙ +
02 +
02
¸F
X=1
∙ +
02 +
02
¸!
= ( [−02−02]F [−02−02])
∗Ã
X=1
X=1
∙ − −
02 − −
02
¸!(11.15)
As an example, consider four circular apertures arrayed in a square, as shown
in Figure (11.12). The coherent transfer function is a bandpass filter, while the
incoherent transfer function is dominated by the central maximum and has isolated
passbands.

11.4MULTIAPERTURE SYSTEMS (“DILUTE”OR “SPARSE”APERTURES)383
Figure 11.12: Pupil function of a multiaperture imaging system composed of four cir-
cular subpupils placed at the vertices of a square. The transfer function of the system
(OTF) in coherent light is proportional to the suitably scaled pupil function, and thus
the system acts as a bandpass filter. The OTF in incoherent (yet still quasimonochro-
matic) illumination is proportional to the scaled autocorrelation of [ ], and thus
the incoherent system is a lowpass filter.

384 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
It is important to note that multiaperture mirror systems have an additional de-
gree of freedom not present in a monolithic mirror system; the longitudinal positions
of the individual elements may be varied. This means that individual mirror com-
ponents will exhibit different phase delays, such as if one subaperture “slips” in its
mounting by a distance ∆ relative to the others. The light reflected from that mirror
traverses the additional distance ∆ twice and thus incurs an additional phase delay
of
∆ = 2 · 2 ·∆
0(11.16)
where 0 is the dominant wavelength of the light. The phase term affects the transfer
function of the system. An example based on the same four elements, but with a
phase delay − radians for one “subaperture” is shown in Fig.(11.13). The resultingincoherent transfer function exhibits two symmetrically placed regions of “negative
amplitude.” This means that the phase of any sinusoidal component imaged by the
system within that range of spatial frequencies is changed by radians, thus “re-
versing” the modulation of imaged sinusoidal components within that small range of
spatial frequencies (“bright” regions become “dark” and vice versa). This observa-
tion is interesting because it demonstrates that an optical imaging system acting in
incoherent light may have observable phase effects.
11.5 Monochromatic Aberrations
We now turn our attention to the practical question of characterizing deviations of
the action of an optic from ideal behavior. It is easy to visualize that the wavefront
generated from a point object that emerges from the exit pupil of an optical system
should be a converging spherical wave that will focus at an ideal image. Of course,
in the near-field Fresnel approximation, we model spherical wavefronts by quadratic-
phase approximations. We have seen that these approximations do exhibit the same
kind of “ideal” behavior. For example, consider the infinite-support 2-D converging
wave with chirp rate 0 =√01 that propagates over that distance 1. We have
seen that the action may be modeled by convolving the converging wavefront with
the ideal impulse response in the Fresnel region:
[ ] ∗ [ ] = exp
∙−
2 + 2
01
¸∗µ
1
01exp
∙+ · 2 · 1
0
¸· exp
∙−
2 + 2
01
¸¶=
1
01exp
∙+ · 2 · 1
0
¸·µexp
∙−
2 + 2
01
¸∗ exp
∙+
2 + 2
01
¸¶=
1
01exp
∙+ · 2 · 1
0
¸·µexp
∙− 2
01
¸∗ exp
∙+
2
01
¸¶·µexp
∙− 2
01
¸∗ exp
∙+
2
01
¸¶(11.17)

11.5 MONOCHROMATIC ABERRATIONS 385
Figure 11.13: OTF of the multiaperture system if the phase of one subpupil is changed
by radians. The pupil function is real valued and bipolar (gray =⇒ amplitude = 0),
and thus so is the coherent OTF. The OTF of the corresponding incoherent system is
bipolar and thus can “reverse” the phase of some frequency components.

386 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
The two 1-D convolution integrals are identical but for coordinate, so we can solve
for one in the frequency domain and substitute by changing the variable:
exp
∙− 2
01
¸∗ exp
∙+
2
01
¸= F−11
½F1½exp
∙− 2
01
¸¾· F1
½exp
∙+
2
01
¸¾¾= F−11
n³p01 exp
h−4
i· exp £+012¤´ · ³p01 exp
h+
4
i= F−11
½³p01
´2· 1 []
¾= 01 · []
So the 2-D convolution evaluates to:
[ ] ∗ [ ] = 1
01exp
∙+ · 2 · 1
0
¸· (01 · []) · (01 · [])
= −01 exp∙+ · 2 · 1
0
¸· [ ] ∝ [ ] (11.19)
This means that we can usefully model the converging spherical wave emerging from
the exit pupil as a converging quadratic-phase factor.
We have also used the M-C-M chirp Fourier transform to derive the ideal image
if the pupil size is finite:
[ ] · exp∙−
2 + 2
01
¸∗µ
1
01exp
∙+ · 2 · 1
0
¸· exp
∙−
2 + 2
01
¸¶=
1
01exp
∙+ · 2 · 1
0
¸·µ
∙
02
02
¸· exp
∙+
2 + 2
02
¸¶∝
∙
02
02
¸· exp
∙+
2 + 2
02
¸(11.20)
so the output irradiance is proportional to the squared magnitude:
[ ] ∝¯̄̄̄
∙
02
02
¸¯̄̄̄2(11.21)
which says that the irradiance at the ideal image point is a scaled replica of the
Fourier transform of the pupil function [ ]. This is the BEST POSSIBLE image
point. Its errors are due to diffraction only, and so it is called the diffraction-limited
image.
In real life, the converging wave emerging from the exit pupil never exactly
matches the actual “spherical” shape (again, approximated by a quadratic phase
term). These deviations often result from fabrication errors. So the image is not the
ideal diffraction-limited case, but rather its quality is limited by the deviations from
ideal behavior, i.e., but the aberrations of the system.
We already know that the quadratic-phase approximation for the spherical wave
is most valid near the axis of symmetry of the system — the optical axis. We can
also consider imaging based on constructs that are normal to the wavefronts that

11.5 MONOCHROMATIC ABERRATIONS 387
represent rays, which convey the energy in straight lines. If the rays are close to
the axis, then the ray angles measured from that axis are small, so we can use the
paraxial approximation to specify these so-called paraxial rays:
sin [] ≈ tan [] ≈ (11.22)
Paraxial rays from the center of the object (its intersection with the optical axis) will
cross the axis at the ideal Gaussian image location.
As we shall see in the discussion of ray optics later, this Gaussian approximation
may be used to derive the imaging equation in another way:
1
1+1
2=1
f1(11.23)
We have seen that the impulse response of the image under the influence of diffrac-
tion in coherent light is the amplitude of a scaled replica of the Fraunhofer diffraction
pattern of the aperture, which is the Fourier transform of the pupil function. The
psf in the incoherent case is the squared magnitude of the same scaled replica of the
spectrum of the pupil function. However, deviations from this ideal due to limitations
of optical fabrication technology result in emerging wavefronts that more often are
aspherical due to deviations in the surface shapes of the optical elements. The as-
pherical wavefront cannot converge to the ideal Fraunhofer diffraction spot, but rather
will produce some other pattern. We describe the “aspherical” deviations from the
ideal “spherical” (actually “parabolic”) wave as aberrations. Generally speaking, the
optical surfaces are more difficult to figure accurately if the aperture is large and/or
the focal length is short. In other words, “fast” optical systems with small f-ratios
are more likely to exhibit significant aberrations.
To introduce the concept of monochromatic aberrations, consider the complex am-
plitude of the wavefront diverging from a specific object point [0 0] to the location
[ ] in the entrance pupil:
[ ;0 0] = [ ] · exp [+ · Φ [ ;0 0]] (11.24)
The magnitude [ ] is the pupil function. Though we have considered only “bitonal”
pupils composed of areas that are either perfectly transparent or perfectly opaque,
the pupil may be apodized, where the magnitude varies with position.
The phase Φ of the light converging from the exit pupil may be decomposed into
two additive terms that we already know, plus a “remainder” due to the deviations
from ideal behavior:
Φ [ ;0 0] =
µ+2
1
0
¶+
µ− ·
2
0
∙1
1− 1
f1
¸¶+ (2 ·∆Φ [ ;0 0]) (11.25)
The first term is the constant phase due to the “downstream” propagation; the sec-
ond is the quadratic phase of the ideal “spherical” wavefront emerging from the
pupil and converging to the image point at the distance 2 =1·f11−f1 determined de-
termined from Eq.(11.23). The remainder ∆Φ [ ;0 0] includes any phase error

388 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.14: Comparison of ideal and actual wavefronts emerging from a hypothetical
optical system. The difference between the wavefronts may be specified by the difference
in phase or by the intersections of rays normal to the wavefront. At locations where
the actual wavefront is “ahead” of the ideal, then the light at that location was emitted
“later” than the ideal and the phase error is negative.
expressed as a multiplier of 2 radians. If the phase error ∆Φ is zero, then we have
the diffraction-limited case already covered; the resulting image is proportional to the
squared magnitude of the scaled Fourier transform of the pupil function.
It is useful to consider the algebraic sign of the phase error ∆Φ, which is de-
termined by the convention used for phase as expressed in Eq.(2.50). If the actual
wavefront at [ ] in the pupil lags behind the paraboloidal approximation to the
ideal spherical wavefront, then the light from that location converging to the image
plane from those “lagging” points must have been emitted earlier in time; the phase
difference ∆ at that location [ ] in the pupil is positive in our convention.
The map of the phase error ∆Φ [ ;0 0] may be decomposed into different
wavefront “shapes,” described by different powers of the image coordinates [0 0]
and of the pupil coordinates [ ]. The weights of each of these different shapes
present in the phase error wavefront are the aberration coefficients , which are
commonly used to specify the differences between actual and ideal behavior. Since
the shapes of the aberration wavefronts are well defined, we can specify the amount of
each aberration in units of wavelength at the edge of the pupil, such as the wavefront
error in terms such as “12wave of spherical aberration and −1
4wave of coma,” where
the numbers refer to the values at the edge of the pupil. One-half wave of aberration
at the edge of the pupil means that the phase error there is radians.
Alternatively, we can describe the difference in action of the optic from the ideal
in terms of the “rays” from different points in the pupil, which are perpendicular to
the wavefront emerging from the pupil at each point in the pupil. Unaberrated rays
should all intersect the optical axis exactly at a common image point. Rays from an
aberrated wavefront will cross the axis at different locations.
The aberration function specifies the difference in optical phase between the actual
and ideal wavefronts that converge to the ideal real image point (or that diverge from

11.5 MONOCHROMATIC ABERRATIONS 389
Figure 11.15: Rays from different points on the wavefront emerging from the pupil of
an optic with spherical aberration; the rays cross the optical axis at different locations.
the ideal virtual image point). Since the shape of the wavefront due to a point object
generally varies with its location in the object plane, the aberration function generally
depends on coordinates in both the object and pupil planes; it is a 4-D function. The
coordinates used in the calculations of the rays for each case are shown in Figure
(11.16).
In Figure(11.16), light with wavelength 0 emerges from the exit pupil at [ ]
and intersects the image plane at [0 0]We can write this as magnitude (determined
by the pupil function [ ]) and phase deviation from ideal:
[ ;0 0] = [ ] · exp [+ · 2 · Φ [ ;0 0]] (11.26)
where Φ [ ;0 0] is the phase of light emerging from [ ] at the pupil towards
the image point at coordinates [0 0]. Again, if Φ [ ;0 0] = 0, then the ideal
diffraction-limited image results. Again from Figure(11.16), the two points [ ] in
the pupil and [0 0] at the image are points are separated by the distance
=
q(− 0)
2+ ( − 0)
2+ 22
and the resulting phase error is:
Φ [ ;0 0] = +2
0(11.27)
It is useful (and simpler) to consider the pupil and image locations in polar coordi-
nates: the pupil coordinate is [ ]→ ( ) and the image location is [0 0] = (0 ).
If the optical system has a circular pupil function, so that it may be rotated about the
optical axis with no change in system function, then the behavior of the aberration
depends only on the difference of the coordinates in the pupil and image planes. This
allows us to consider a three-dimensional description of the wave aberration function

390 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.16: Coordinates used to evaluate aberrations. Light propagates from the
pupil plane (coordinates without subscripts) over the distance 2 to the image plane
(coordinates with subscripts). Note that the pupil and image plane coordinates are
normalized so that max = (0)max = 1.

11.5 MONOCHROMATIC ABERRATIONS 391
based on radial coordinates , 0, and the relative azimuthal angle − ≡ ; i.e., we
can write the phase error function in the form ∆Φ [ 0 ]. The relative phase be-
tween the object point and a location in the pupil is 2 radians (per cycle) multiplied
by the number of cycles, which is the ratio of the distance between the locations in
the object plane and in the pupil divided by the wavelength 0:
distance: =
q22 + (− 0)
2+ ( − 0)
2
=©22 + ( cos − 0 cos)
2+ ( sin − 0 sin)
2ª 12
Now expand and collect the terms with common factors:
=©22 +
¡2 cos2 + 20 cos
2 − 2 · · 0 cos cos¢+¡2 sin2 + 20 sin
2 − 2 · · 0 sin sin¢ª 1
2
= 2 ·½1 +
2 + 20 − 2 · · 0 (cos cos+ sin sin)22
¾12
= 2 ·½1 +
∙µ2 + 2022
¶+
µ−2 · · 0
22cos [ − ]
¶¸¾ 12
≡ 2 ·½1 +
∙µ2 + 2022
¶+
µ−2 · · 0
22cos []
¶¸¾12
(11.28)
If we assume that 2 is (much) larger than or 0, we can expand the square root
into a power series that will converge via the binomial theorem, in Eq.(6.28):
(1 + )12 = 1 +
1
2− 1
82 +
1
163 − · · · (11.29)
Each additional term will result in increased accuracy of the square root, but the
series is often truncated after the quadratic term. The linear and quadratic terms in

392 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
the expansion are:
≡µ2
22
¶+
µ2022
¶+
µ−2 · · 0
22cos []
¶=⇒ 1
2 =
µ2
222
¶+
µ20222
¶+
µ− · 0
22cos []
¶(11.30)
=⇒ −182 = −1
8
∙µ2 + 2022
¶+
µ−2 · · 0
22cos []
¶¸2= −1
8
"µ2 + 2022
¶2+
µ−2 · · 0
22cos []
¶2+ 2
µ2 + 2022
¶µ−2 · · 0
22cos []
¶#
= −18
∙µ4 + 40 + 2
22042
¶+
µ+4 · 2 · 20
4cos2 []
¶− 4 ·
µ2 + 202
¶³ · 02
cos []´¸
= −18
∙µ4 + 40 + 2
2204
¶+
µ4 · 2 · 20
42cos2 []
¶− 4
µ3 · 042
cos [] + · 3042
cos []
¶¸−182 = −
µ4 + 40 + 2
220842
¶−µ2 · 20242
cos2 []
¶+
µ3 · 0242
cos [] + · 30242
cos []
¶(11.31)
We can sum these terms multiply by the leading factor of2
0to produce an approxi-
mate expression for the phase measured in cycles of the wavelength at each point in
the image from each point in the pupil:
(; 0 2) ≈ 2 +
µ2 + 2022
¶−µ · 022
cos []
¶−µ4 + 40 + 2
2 · 20832
¶−µ2 · 20232
cos2 []
¶+
3 · 0232
cos [] + · 30232
cos [] (11.32)
There are 10 terms in the second-order approximation to the propagation distance
: the constant 2, three terms from the first-order polynomial, and six from the
second-order polynomial:
(; 0 2) ≈ 2 +
∙µ2
22
¶+
µ2022
¶−µ · 0 cos []
22
¶¸−µ
4
832
¶−µ
40832
¶−µ2 · 20232
¶+
µ3 · 0 · cos []
232
¶−µ2 · 20 · cos2 []
232
¶+
µ · 30 · cos []
232
¶(11.33)
The terms represent “shapes” of the wavefront emerging from the exit pupil. n other
words, we have “decomposed” the approximate propagation distance of the “spheri-
cal” wave (actually quadratic) into terms with different powers of the coordinate in

11.5 MONOCHROMATIC ABERRATIONS 393
the pupil plane (with coordinates [ ] = ( )) and in the image plane (with coor-
dinates [0 0] = (0 ) in a manner analogous to the decomposition into sinusoidal
components in the Fourier transform. Our goal will be to decompose the phase dif-
ference between the ideal and actual wavefronts using these same terms, but weighted
by the “number of wavelengths” of each at the edge of the pupil ( = 1). Again, since
the system is assumed circularly symmetric, so that only the difference in azimuthal
angle − ≡ is relevant.
11.5.1 Names of Aberrations
The difference in the shape of the “actual” wavefront from the ideal spherical wave-
front is described as a phase and is decomposed into a specific set of components based
on different powers of the normalized object height, image height, and the included
angle. Each of these components has its own unique name and “shape,” and each
is described by a coefficient that determines “how much” of that “shape” is present
in the actual phase difference from the ideal converging spherical surface. From the
series above, we can apply weighting coefficients to the three relevant coordinates
distinguished by subscripts: the index is the power of the radial coordinate 0 at
the image (the “image height”), the index is the power of the radial coordinate
at the pupil, and the index is the power of cos []. From the series above we
can see that only some combinations of powers are included in the summation, so we
can write the distance between the actual and ideal wavefronts at the pupil location
[ ] = for the image location [0 0] = 0 is:
∆ [ ;0 0 ] = ideal [ ;0 0 ]− actual [ ;0 0 2]
=X
· (0) · () · (cos)
=000 · 1 (constant phase, propagation from pupil plane to image plane)
+200 · 20 (“piston error”)+111 · 0 · · cos (“tip-tilt”)+020 · 2 (“defocus”)+040 · 4 (“spherical aberration”)+131 · 0 · 3 · cos (“coma”)
+220 · 20 · 2 (“curvature of field”)+222 · 20 · 2 · cos2 (“astigmatism”)+311 · 30 · · cos (“distortion”)+400 · 40 (“piston error”)
+ · · · (11.34)
The coefficients are analogous to Fourier coefficients; they are measures of the
“amount” of each term present in the aberrated wavefront and are the “number of
waves” of each term measured at the edge of the pupil ( = 1). — the coefficients
are the “number of waves” of the aberration. Each term is scaled by 2 radians
per wavelength to convert the number of waves to phase angle.
Note that all of the terms now have positive signs; any negative sign in the ex-
pansion is included in the coefficients.
For example, a sample system would have “one-half wave of spherical aberration
and a quarter wave of astigmatism” if 040 =12and 222 =
14. The corresponding

394 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
distance difference measured in “wavelengths” is:
∆ ( 0) =1
24 +
1
4
¡20 · 2 · cos2
¢(11.35)
so the corresponding phase difference is:
∆Φ ( 0) = 2 ·∆ ( 0) = 2 ·µ1
24 +
1
4
¡20 · 2 · cos2
¢¶(11.36)
Shift Invariant or Not?
Note that phase errors that depend on the image “height” 0 =p20 + 20 result in dif-
ferent “shapes” for point sources at different locations in the object; these aberrations
therefore are shift-variant effects and strictly cannot be characterized by impulse re-
sponses and/or transfer functions. That being said, it is common practice to examine
the results in local regions as though the aberration is shift invariant, which allows
the analyst to create a (“pseudo”) frequency-domain description of the action of the
aberration.
11.5.2 Aberration Coefficients
To get an idea of the contribution to a wavefront from each of these terms, we can
plot graphs of these “shapes” at the pupil for specified locations in the object plane.
The examples are plotted for different object locations for the reference case with
0 = 2 = 1. The aberration coefficients are grouped by the numerical powers
of the radial terms in the series, e.g., + = 0 for 000, + = 2 for 200 (piston
error), 111 (tip-tilt), and 020 (defocus), + = 4 for 040, 131, etc. You might
expect that the second-order grouping would include 200, 111, and 020but the
groupings are based for historical reasons on the powers of the coefficients for “rays”
that are derived from “wavefronts” via the gradient operator (a first-order derivative),
so the group of three for + = 2 comprise the first-order ray aberrations or the
second-order wave aberrations. The terms with + = 4 are the third-order ray
aberrations or the fourth-order wave aberrations.
Zero-Order Term:
Propagation:
constant phase (zero-order “piston error” = propagation from pupil to image):
(11.37)
∆ ( 0) =000 ·⎧⎨⎩ 1 if ≤ 10 if 1

11.5 MONOCHROMATIC ABERRATIONS 395
This is identical to the leading constant phase term in the Fresnel and Fraunhofer
approximations exph+ · 2 · 2
0
i. If we normalize the pupil coordinate to have a max-
imum radial value of unity, then the increment to the wavefront from the aberration
is:
(; 0) = ³2
´· exp [+ · 2 ·000] (11.38)
The coefficient 000 is the number of additional wavelengths due to propagation
“downstream” from the object to the pupil — it is the “constant-phase term” we have
considered in the expressions for Fresnel and Fraunhofer diffraction. Because it is a
normal part of the imaging, it is not considered to be an aberration. The shape of
the wavefront for zero-order piston error is shown in Figure (11.17).
Figure 11.17: Wavefront emerging from pupil with the zero-order term and constant
phase, so this is the shape of the piston error “aberration.”
Second-Order Wave (= First-Order Ray) Aberrations:
These include the three terms for which the sums of the powers of and 0 equal two.
Since the rays are orthogonal to the wavefronts (and are calculated by derivatives),
these correspond to the “first-order” aberrations for rays. In fact, these three terms
often are not considered to be aberrations since the only one that has a degrading
effect on an irradiance image is defocus, which may (of course) be compensated by
changing the location of the sensor so that it coincides with the image.
Constant Phase: First-Order Piston Error The coefficient200 is the number
of wavelengths between the ideal and actual wavefronts at the edge of the pupil
scaled by the square of the image height, so the difference in distance (measured in
wavelengths) between the ideal wavefront and that with piston error as a function of

396 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
the pupil height is:
constant phase (first-order piston error):
∆ (; 0) =200 · 20 ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.39a)
In words, the height in the pupil has no impact on the difference in distance. The cor-
responding phase due to this term is obtained by scaling the distance in wavelengths
by 2 radians per wavelength:
(; 0) = ³2
´· exp £+ · 2 ·200 · 20
¤(11.40)
This is an additional constant phase due to the off-axis location in the image plane;
it is quadratic in the image coordinate 0, but constant in the pupil coordinate , it
evaluates to a constant across the pupil for a particular image location. Since this
measures the “constant” phase difference, it has no effect on the measured irradiance
and therefore no impact on the quality of the image.
Figure 11.18: Wavefront emerging from pupil that exhibits constant phase from the
first-order term — this is piston error.
Bilinear Phase: “Tip-Tilt” This is a term that includes both the height at the
pupil and image. The coefficient 111 is the number of wavelengths of this “tilted
planar” shape at the edge of the pupil, so the distance as a function of the pupil and
image heights (measured in wavelengths) is:

11.5 MONOCHROMATIC ABERRATIONS 397
linear phase from both object and pupil (tip or tilt):
∆ ( 0) =111 · ( · 0 · cos []) ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.41)
The aberration measured in radians is obtained by scaling the distance by 2 radians
per wavelength. The corresponding wavefront aberration is:
(; 0) = ³2
´· exp [+ · 2 ·111 · ( · 0 · cos [])] (11.42)
This “bilinear” phase has linear contributions from the pupil location and image
location 0 confirms that the shape of the field emerging from the pupil for a particular
object location is a “flat” plane tilted in proportion to the off-axis position of the
object and the image. Because it is a linear phase in the pupil, it displaces the
resulting image towards the direction where the phase increment is negative. The
tilted wavefront for this aberration is shown in Figure (11.19).
In atmospheric imaging scenarios (imaging along a vertical path through turbu-
lence), the time-varying tip-tilt aberration is dominant. For example, the centers of
the images of individual stars appear to move around over short time intervals of
the order of hundredths of a second. The correction of tip-tilt aberration has a very
significant positive effect on the quality of the resulting image. For an example, see
the animated GIF file at URL:
http://www.ast.cam.ac.uk/~optics/Lucky_Web_Site/100Her_10ms_200fr.gif
https://www.ast.cam.ac.uk/research/instrumentation.surveys.and.projects/lucky.imaging/latest.res
Figure 11.19: Wavefront emerging from pupil with a nonzero first-order linear term
for tip-tilt error.

398 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Quadratic-Phase Error: Focus Shift = “Defocus” The incremental distance
of the wavefront surface from the ideal wavefront at the pupil is a paraboloid with
“height” proportional to 2:
quadratic phase =⇒ focus shift = “defocus”
∆ (; ) =020 · 2 ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.43)
where the factor 020 is the coefficient measured as the number of “waves” at the
edge of the pupil. The corresponding phase error is again obtained by scaling the
distance ∆ by 2 radians per wavelength:
(; 0) = ³2
´· exp £+ · 2 ·020 · 2
¤(11.44)
This quadratic term is the error in the Fresnel propagation from the exit pupil if
the observation plane does not coincide with the ideal image plane and is therefore
called “defocus.” Since it is a result of improper positioning of the image plane and
not to flaws in the optics, it is often not considered to be an “aberration,” but there
is reason to do so in some applications. As an example, consider the atmospheric
imaging scenario mentioned in the discussion of “tip-tilt” aberration; any time-varying
quadratic contribution to the relative phase displaces the focal plane (slightly), so
images through atmospheric turbulence with quadratic contributions appear to go
in and out of focus over short time intervals (but, as already mentioned, the tip-tilt
aberration is dominant, totalling 87% of the light energy under certain assumptions —
see Noll, “Zernike polynomials and atmospheric turbulence,” JOSA, 66, pp.207-211,
1976 and van Dam & Lane, “Tip/tilt estimation from defocused images,” JOSA A,
19, pp. 745-752, 2002). The “shape” of the defocused wavefront is paraboloidal, as
shown in Fig.(11.20).
Since defocus is a function only of the pupil-plane coordinates, it is shift invariant
at the image plane and therefore may be described as a convolution with correspond-
ing point spread and transfer functions. As an example of the effect, consider a small
first-order focus error of radians at the edge of a rectangular pupil with linear di-
mension 0 = 1 unit; this is “12wave of defocus”) . The complex-valued wavefront
has the form shown in Figure (11.21).
The incoherent transfer function is the scaled autocorrelation of the pupil and
the impulse response is the inverse Fourier transform, shown in Figure (11.22). The
MTF has a zero at the normalized spatial frequency ≈ 05, and the psf with defocusis “wider” and the peak irradiance is “smaller” than that of diffraction-limited psf,
as though the “brightness” of the spot had been “smushed” into a wider and flatter
distribution, as shown in Figure (11.22).
Images of a star through f/10 imaging systems with a clear aperture and Cassegrain
system with 50% obscuration and one-half wave of defocus are shown in Figure
(11.23).

11.5 MONOCHROMATIC ABERRATIONS 399
Figure 11.20: Wavefront emerging from pupil with the first-order quadratic term, focus
shift error = “defocus”
Figure 11.21: Pupil function with defocus of radians at edge of the pupil (“half-wave
of defocus”): (a) real part; (b) imaginary part; (c) magnitude; (d) phase, showing
quadratic nature.

400 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.22: (a) MTF of incoherent optical system with square aperture with one
half-wave of defocus compared to MTF without defocus (red); (b) psf with half-wave
of defocus (black) and without defocus (red).
Figure 11.23: Comparison of diffraction-limited images from f/10 systems with (a)
clear aperture and (b) Cassegrain with 50% obscuration, and with one-half wave of
defocus for the same (c) clear aperture and (d) Cassegrain. Note that the first “ring”
of the pattern is more visible for the Cassegrain system in (b) than for the clear
aperture in (a).

11.5 MONOCHROMATIC ABERRATIONS 401
Figure 11.24: MTF and corresponding psfs for square pupil in quasimonochromatic
light with different amounts of defocus from 04at the edge of the pupil to 150. Note
that the decrease in MTF is most pronounced at intermediate spatial frequencies.
For larger amounts of defocus, the MTF goes negative over regions of the frequency
domain (contrast reversal). The psf widens with increasing defocus.
Recall from Fig.(11.13) in the discussion of a telescope with a multiaperture pupil
function that it is possible for one subaperture to “slip” in its mount, which produced
a phase change of that element relative to the other elements. In the example in
Fig.(11.13), the phase of one of the four subapertures differed from the others by
radians. In that example, the transfer function had regions with negative amplitude
resulting from the autocorrelation of the pupil function. The same observation of neg-
ative values of the transfer function may result from defocus if the maximum phase
error at the edge of the pupil exceeds radians. This is demonstrated by evaluating
the MTFs for square apertures with different amounts of defocus (measured in waves
at the edge of the pupil), as shown in Figure (11.24). Note in particular that the
intermediate frequencies are degraded more rapidly than the spatial frequencies close
to the origin and to the cutoff frequency. Note that the MTF at certain frequencies
is negative, which means that the modulation has changed sign at those frequencies.
Sinusoids with those spatial frequencies that are scaled by negative values have their
modulation “reversed” (“brighter” and “darker” extrema in the original object be-
come “darker” and “lighter,” respectively, in the defocused image). This can be seen
in an object with different spatial frequencies at obvious locations.
Now consider the effect of defocus on the image of the “radial grating” in Figure
(11.25); the spatial frequency varies as the reciprocal of the distance from the center.
In the examples shown, the irradiance is biased up so that its normalized maximum
and minimum amplitudes are 1 and 0, respectively. The grating is imaged through a
real optical system onto a CCD sensor that samples the image and thus the image is
aliased at large spatial frequencies (near the center). The three images are at the focal
plane (i.e., “in focus”) and with two increments of defocus. Track a radial line in the
original (in red) to see that the amplitude of the in-focus image does not vary (except

402 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.25: Effect of two increments of defocus on the image of a radial grating.
The negative regions of the MTF of defocus imply that the contrast of those spatial
frequencies is “reversed” (darker gray → lighter gray and vice versa). Track the
“lightness” along the red lines to see the contrast reversals. Note that the “in-focus”
image exhibits some sampling (“aliasing”) artifacts in the center where the azimuthal
spatial frequency is large.
where there is aliasing in the sampled image), while the defocused image exhibits
several changes in phase, from light to dark to light, etc. The contrast of the smallest
spatial frequency (at the edge of the image) is reversed in the image with more defocus,
and this image also exhibits more changes in phase. Because the spatial frequency in
the azimuthal direction is related to the radial distance (larger frequency close to the
center, smaller frequency at large distances), a radial plot of the modulation of the
fringe may be rendered as the modulation transfer function for defocus.This artifact
is often called “spurious resolution,” because the spatial frequencies in the image are
incorrectly reproduced at locations of those frequencies in the object.
The same observation that phase errors larger than radians can “invert” the
modulation will be true for higher-order aberrations, as will be demonstrated in the
next section.
One other relevant note — since the wave aberration function for defocus is largest
at the edge of the pupil, one simple method to minimize its impact on the image is
to reduce the size of the aperture (“stop down the lens”). Since this will reduce the
phase error at the edge of the pupil, it will result in an impulse response that better
matches that the ideal Airy disk at the diffraction limit (though the Airy disk will of
course be “wider” because the aperture is smaller). This also suggests the observation

11.5 MONOCHROMATIC ABERRATIONS 403
that stopping down the lens increases the range of object distances that appear to
produce “in focus” images — the so-called “depth of field.” This will be discussed in
more detail shortly.
11.5.3 Fourth-Order Wave Aberrations (Third-Order Ray):
the “Seidel aberrations”
+4 =⇒ no variation at object, quartic phase at pupil
=⇒ Spherical Aberration 040 (LSI) (11.45a)
+ · 30 · cos [] =⇒ cubic phase at object, linear phase at pupil
=⇒ Coma, 131 (LSV) (11.45b)
+2 · 20 =⇒ quadratic phase at object and pupil
=⇒ Field Curvature, 220 (LSV) (11.45c)
2 · 20 · cos2 [] =⇒ quadratic phase at object and pupil + azimuth variation
=⇒ Astigmatism, 222 (LSV) (11.45d)
+3 · 0 · cos [] =⇒ linear phase at object, cubic phase at pupil
=⇒ Distortion, 311 (LSV) (11.45e)
+40 =⇒ quartic phase at object, no variation at pupil
=⇒ third-order Piston Error, 400 (LSV) (11.45f)
Note that four of these six terms have even powers of both the pupil coordinate
and the image coordinate 0, whereas coma and distortion include odd powers of
both.
Spherical Aberration
This is the simplest third-order aberration to describe mathematically since it depends
only on the coordinates in the pupil plane, so that its effect is constant across the
image plane. This means that spherical aberration is the only one of the six Seidel
terms that is shift invariant, and may therefore be described as a convolution with
corresponding psf and MTF. The wavefront shape for spherical aberration with a
positive value of the coefficient 040 resembles a deeper “bowl” than the paraboloid
for defocus.
∆ (; 0) =040 · 4 ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.46)
The shape of the wavefront with spherical aberration is shown in Figure (11.26).
(; 0 2) = ³2
´· exp £+ · 2 ·040 · 4
¤(11.47)
If the numerical coefficient of spherical aberration 040 0, then rays from the

404 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.26: Wavefront emerging from pupil with the quartic term from the second
order of expansion, which is spherical aberration.
marginal regions of the pupil have a steeper slope than those from the paraxial region
near the optical axis. In other words, the “marginal focus” is closer to the lens than
the ideal “paraxial focus.” The paraxial image of a point object is not “sharp” but
exhibits a halo of light around a bright central core, as shown in Figure (11.27). If
040 0, the focus of the marginal rays at the edge of the pupil is more distant than
the focal point from rays near the center of the pupil.
Because it is a shift-invariant effect at the image plane, spherical aberration may
be described by an impulse response and by a transfer function. Spherical aberration
with 040 0 is a distortion of the true spherical wavefront that makes a “deeper
bowl” so that the incremental phase error is large near the edge of the pupil (far
from the optical axis, for the marginal part of the wave) and small near the center
of the pupil (near the optical axis, for the paraxial part of the wave). The profiles of
wavefronts with defocus and spherical aberration are shown in Figure (11.28). Note
that there is less “volume” in the phase error from spherical aberration than from
defocus near the edge of the pupil, which means that the maximum phase error for
spherical aberration must be larger than that of defocus at the edge of the pupil to
produce negative values in the MTF.
Consider an example for spherical aberration where the phase error is radians
at the edge of a square pupil, the same phase error at the edge that was considered
for defocus. The profiles of the phase in the pupil are shown in Figure (11.29).
The MTF shows a significant decrease as the frequency approaches cutoff and the
psf is noticeably wider and “shorter,” as shown for several examples of the aberration
coefficient 040 in Figure (11.30).
Images through a f/10 clear-aperture and 50%-obscuration Cassegrain systems
with one-half wave of third-order spherical aberration are compared to the corre-
sponding diffraction-limited images in Figure (11.31).
Spherical aberration is of particular interest because the uncorrected optical sys-

11.5 MONOCHROMATIC ABERRATIONS 405
Figure 11.27: Negative coefficient of spherical aberration of positive lens: rays from
the margin of the pupil cross axis closer to the optic than paraxial rays. The image
of a point object at the paraxial focus exhibits a bright central region surrounded by a
“halo” of light from the margin of the pupil.
Figure 11.28: Example of quartic wavefront error of spherical aberration compared to
quadratic error from defocus. Spherical aberration error is a “deeper bowl.”

406 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.29: Pupil function for one-half wave of spherical aberration: (a) real part;
(b) imaginary part; (c) magnitude; (d) phase in units of radians, showing the
fourth-power behavior.

11.5 MONOCHROMATIC ABERRATIONS 407
Figure 11.30: MTF and corresponding psfs for square pupil with different amounts
of spherical aberration from 04to 150 at the edge of the pupil. The MTF has a
similar behavior as for defocus; it decreases most rapidly at the middle frequencies
rather than at smallest or largest, and it may go negative at some frequencies. The
MTF for spherical aberration decreases more slowly than for defocus because the phase
changes more slowly except near the edge of the pupil. Also note that the MTF becomes
negative for phase errors noticeably larger than radians.
Figure 11.31: Comparison of diffraction-limited images from f/10 systems with cir-
cular pupils: (a) unaberrated clear aperture and (b) Cassegrain with 50% obscura-
tion, and with one-half wave of spherical aberration for (c) clear aperture and (d)
Cassegrain.

408 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
tem in the Hubble Space telescope suffered from significant amounts of this condition
due to flaws in the primary mirror that were disguised during mirror testing.
Use of Defocus to Compensate for Spherical Aberration Spherical aberra-
tion of the wave emerging from different parts of the pupil may be partially balanced
by changing the distance of the observation plane, i.e., by “adding defocus.” For ex-
ample, the phase at the edge of the pupil may be compensated by applying a defocus
aberration in the opposite direction so that
040 +020 = 0 =⇒ 020 = −040 (11.48)
The phase of the wavefront with spherical aberration balanced by defocus is:
(; 0) = ³2
´· ¡exp £+ · 2 ·020 ·
¡2 − 4
¢¤¢(11.49)
If we use defocus to cancel the phase error due to spherical aberration at the edge of
the pupil, the resulting transfer function and impulse response have the form shown
in Figure (11.33), so that the image is improved markedly by using the appropriate
amount of defocus.
The example in Fig. (11.32) shows radial profiles in the pupil of the wavefront
with 12wave of spherical aberration balanced by 1
2wave of defocus:
The corresponding transfer function and profiles of the impulse response are shown
in Fig.(11.33)
Coma
The first aberration that is not shift invariant is coma, where the wavefront error is
cubic in the pupil coordinate and linear in the image coordinate:
∆ (; 0) =131 ·¡0 · 3 · cos []
¢ ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.50)
The corresponding wave aberration function for an image point located at 0 is:
(; 0) = ³2
´· exp £+ · 2 ·131 · 0 · 3 · cos []
¤(11.51)
as shown in Figure (11.34). This produces a different phase error, and therefore
different images, for different values of the image height 0 as shown in the example
in Figure (11.35) (Fig.83 on p.93 of Star Gazing with Telescope and Camera by
George T. Keene, Chilton Book Co, 1967). The images have a “comet-like” shape,
hence the name for the aberration.
Images obtained from f/10 systems with and without the same 50% Cassegrain
obscuration and a half wave of coma are compared to diffraction-limited images in
Figure (11.36).

11.5 MONOCHROMATIC ABERRATIONS 409
Figure 11.32: Pupil function with 12wave of spherical aberration balanced by −1
2wave
of defocus as (a) real part, (b) imaginary part, (c) magnitude, and (d) phase.
Figure 11.33: Application of defocus to balance spherical aberration at edge of square
pupil: (a) MTF without aberrations (black), with 1/2 wave of spherical aberration
(red), and after balancing with -1/2 wave of defocus; (b) corresponding impulse re-
sponses.

410 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.34: Wavefront with coma emerging from pupil from a specific off-axis point
source.
Figure 11.35: Star field recorded through optical system with coma; elongation of the
star images increases with distance from optical axis (which is located below bottom
of the image). Credit: “Star Gazing with Telescope and Camera,” George T. Keene,
Amphoto, Garden City, 1967, p. 93.

11.5 MONOCHROMATIC ABERRATIONS 411
Figure 11.36: Comparison of diffraction-limited images from f/10 systems: (a) clear
aperture and (b) Cassegrain system with 50% obscuration. Both cases are shown with
one-half wave of coma for (c) clear aperture and (d) for Cassegrain, showing the
asymmetry of the images.

412 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Curvature of Field
The distance error for curvature of field is:
∆ (; 0) =220 ·¡20 · 2
¢ ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.52)
and the corresponding wavefront error is:
(; 0) = ³2
´· exp £− · 2 ·220 · 20 · 2
¤(11.53)
as shown in Figure (11.37). As indicated by the name, the “best” images in systems
with this aberration are on a curved surface.
Figure 11.37: Wavefront error for field curvature for an on-axis source.
Some imaging systems (e.g., Schmidt cameras) are deliberately designed with
curved fields to produce good images over wide fields of view. The sensors used
in wide-field Schmidt astronomical cameras used to be glass plates that were predis-
torted” (“warped” to follow the field curvature, as by vacuum) prior to being installed
in the camera. Since the plates could be as large as 14- in square (≈ 360mm), thiscould be a touchy operation. Emulsions with flexible bases were much easier to ac-
commodate.
Astigmatism
The Latin word for “points” is “stigmata,” so that a system that is astigmatic is not
capable of producing point images. The distance error is:
∆ (; 0) =222 ·¡20 · 2 · cos2 []
¢ ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.54)

11.5 MONOCHROMATIC ABERRATIONS 413
and the wavefront aberration is:
(; 0) = ³2
´· exp £+ · 2 ·222 · 20 · 2 · cos2 []
¤(11.55)
The error is quadratic in both pupil and image coordinates with an azimuthal de-
pendence; the additional quadratic is maximized along the azimuthal direction = 0
and, and zero along the orthogonal direction. It therefore adds an azimuthally depen-
dent “focusing” power. In other words, object lines oriented along different directions
are focused at different distances from the optic. An example of an astigmatic system
with an unobscured circular aperture (f/10) is shown at the focal plane (no defocus)
and with ±02waves of defocus is shown in Figure (11.38). Note that the image is
elongated in one direction on one side of the focal plane and elongated in the orthog-
onal direction on the other side. The shape of one example of astigmatic wavefront
is shown in Figure (11.39).
The eye systems of many people exhibit astigmatism, which means that the cor-
rective lenses must have different powers along the orthogonal axes; in other words,
lenses with cylindrical power are needed.
Figure 11.38: System with f/10 unobscured circular aperture with +02of astigmatism:
(a) with −02of defocus; (b) at the focal plane (no defocus), and (c) with +0
2of
defocus. These show the assymetry of the astigmatic images.
Lenses that have been corrected for astigmatism are known as anastigmats.
Distortion
The coefficient for distortion is linear in the object ray height and cubic in the image
height, so the distance error is:
∆ (; 0) =311 ·¡30 · · cos []
¢ ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.56)
and the corresponding wavefront aberration is:
(; 0) = ³2
´· exp £+ · 2 ·311 · 30 · · cos []
¤(11.57)
This aberration includes cubic and linear dependences on the pupil and image

414 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.39: Wavefront emerging from pupil that exhibits astigmatism.
coordinates, respectively, which means that the effect of distortion also varies with
image height.
Figure 11.40: Wavefront emerging from pupil for one example of distortion.
The image shapes resulting from distortion with coefficients of different algebraic
signs are different. If 311 0 or 311 0, the images suffer from “pincushion
distortion” or “barrel distortion,” respectively, as shown in Figure (11.41).
Piston Error
The distance error is a function only of the image height 0

11.5 MONOCHROMATIC ABERRATIONS 415
Figure 11.41: Images of a grid object through systems with (a) no aberrations; (b)
“pincushion” distortion (311 0); (c) “barrel” distortion (311 0).
∆ (; 0) =400 · 40 ·⎧⎨⎩ 1 if ≤ 10 if 1
(11.58)
The wavefront aberration function is:
(; 0) = ³2
´· exp £+ · 2 ·400 · 40
¤(11.59)
This is a constant phase due to the off-axis distance at the image plane and has no
effect on the irradiance of the image, hence it often is not considered to be an aber-
ration. However, it is important for optical systems with “sparse” primary elements,
such as multiple-mirror telescopes, where the phase of the individual apertures may
be different.
Aberrations due to Atmospheric Interactions
Of course, the ultimate resolution of optical systems may be due in part to other
uncontrollable factors. For example, ground-based astronomical telescopes are ul-
timately limited by random variations in local air temperature that create random
variations in the refractive index of atmospheric “patches.” The instantaneous re-
alizations of these variations may be decomposed into the Seidel aberrations. The
constant part of the phase is the “piston” error and has no effect on the irradiance
(the squared magnitude of the amplitude). Linear phase errors move the image from
side to side and or top to bottom (“tip-tilt”). Quadratic phase errors (“defocus”)
add or subtract power from the lens to move the image plane along the axis forwards
(towards the optic) or backwards (away from the optic), respectively.
The tip-tilt error is most significant in most atmospheric imaging situations, which
means that correcting for the linear term alone can significantly improves the image
quality. In other words, just “lining up” or “registering” individual image frames can
often improve the image quality significantly.

416 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.42: Wavefront emerging from pupil with the constant term from second-
order expansion: piston error
Another interesting aspect of imaging through the atmosphere that may seem non-
intuitive (but that is easily explained) is that the impulse response is invariant across
the field of view, so that images of point sources through atmospheric turbulence are
identical. Consider the example in Figure (11.43).
The field of correcting atmospheric aberrations in real time is called “adaptive
optics,” and is an active research area. It also is possible to process sequences of
images (as from movie film, video capture, or sequences of still frames from a digital
sensor) after collection with the goal of recovering additional information from the
recorded images. In the old days, this task was called “stellar speckle interferometry.”
11.5.4 Examples of Imaging Systems
1-D System without aberrations
Consider a 1-D imaging system with rectangular pupil of width 0 acting in quasi-
monochromatic light with dominant wavelength 0, which propagates the distance 2to the image. The pupil function has the form:
1 [] =
∙
0
¸We can evaluate the coherent impulse response via the scaled 1-D Fourier transform:
1 [] ∝
∙0 ·
01
¸=
⎡⎣ ³010
´⎤⎦

11.5 MONOCHROMATIC ABERRATIONS 417
Figure 11.43: Calculated images of single star and double star imaged through sys-
tem with f/10 clear aperture: (a) single star, (b) double star. Imaging through one
half-wave of turbulence: (c) single star, showing “shape” of the impulse response, (d)
double star, showing that the images of both stars are identical impulse responses.
Imaging through different realization of one-half wave of turbulence: (e) single star,
(f) double star, again showing identical responses. The aberrated images may give in-
sight into the common name of “speckles” within images of stars through atmospheric
turbulence.

418 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
(the impulse response is “narrower” for a “wider” pupil). The impulse response in
quasimonochromatic light is:
h [] = |1 []|2 ∝ 2
⎡⎣ ³020
´⎤⎦
The distance from the origin to the first zero is 020.
The associated modulation transfer function is the Fourier transform of the im-
pulse response normalized to unity at the origin:
H1 []
H1 [0]=
⎡⎣ ³0
02
´⎤⎦
Note that we could also evaluate the coherent transfer function directly from the
pupil:
[] ∝ [−02] =
∙+02
0
¸=
⎡⎣ ³0
−02
´⎤⎦
The incoherent transfer function is the normalized autocorrelation of 1 []:
H1 [] ∝
⎡⎣ ³0
02
´⎤⎦F
⎡⎣ ³0
02
´⎤⎦
=
⎡⎣ ³0
02
´⎤⎦ ∗
⎛⎝
⎡⎣− ³0
02
´⎤⎦⎞⎠∗
=
⎡⎣ ³0
02
´⎤⎦ ∗
⎡⎣ ³0
02
´⎤⎦
=0
02·
⎡⎣ ³0
02
´⎤⎦
=⇒ H1 [] =
⎡⎣ ³0
02
´⎤⎦
where the scaling property of convolution has been used. The “cutoff spatial fre-
quency” (measured in “cycles per unit length, e.g., cycles
mm) and “cutoff angular fre-

11.5 MONOCHROMATIC ABERRATIONS 419
quency” (measured in cycles
radian) of the system are:
max =0
02
max = 2 · max =0
0
The profiles of the impulse responses and transfer functions are shown in Fig.(11.44)
for the case 0 = 2 units:
2 [] = h2
i2 [] = 2 · [2]
2
∙
02
¸= 2 ·
"¡
022
¢# =⇒ 2 [] ∝
"¡
022
¢#
h2 [] = |2 []|2 ∝ 2
"¡
022
¢#
2 [] ∝
∙−022
¸=
⎡⎣ ³2
02
´⎤⎦
H2 [] ∝
⎡⎣ ³2
02
´⎤⎦
1-D System with Tilt
If we add some “tilt” to the pupil (as by introducing a prism into the aperture), then
the form of the aperture function includes a phase factor that varies linearly across
the pupil:
2 [] =
∙
0
¸· exp
∙+ · 2 · 1
0· ¸
where 0 is a parameter with dimensions of length that specifies the distance from
the origin along the -direction over which the phase changes by 2 radians. The
phase at the edge of the pupil is:
Φ
½ =
0
2
¾= 2 · 1
0· 0 = 2 · 0
0
which is larger for small values of 0.
The linear phase ensures that the spectrum of the aperture function is the ideal
function with translation:
2 [] = (|0| · [0]) ∗ ∙ +
1
0
¸

420 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.44: 1-D unaberrated pupil: (a) [] =
∙
0f00
¸; (b) h [] =¯̄̄̄
∙
0f00
¸¯̄̄̄2; (c) [] =
∙00f0
¸; (d) H [] = []F []

11.5 MONOCHROMATIC ABERRATIONS 421
After scaling back to the space domain to evaluate the “coherent” impulse response:
[] ∝ 2
∙
02
¸= |0| ·
∙0 ·
02
¸∗ ∙
02+1
0
¸
= |0| ·
⎡⎣ ³020
´⎤⎦ ∗ "+ 02
0
02
#
= |0| · |02| ·
⎡⎣ ³020
´⎤⎦ ∗ ∙+ 02
0
¸
= |020| ·
⎡⎣+ 020³
020
´⎤⎦
The corresponding incoherent impulse response is the squared magnitude:
h2 [] = |2 []|2 ∝ 2
⎡⎣+³020
´³020
´⎤⎦
= 2
⎡⎣ ³020
´⎤⎦ ∗ ∙+ 02
0
¸
which is a translated replica of the original unaberrated impulse response — the two
impulse responses have the same form, just different locations. The translation dis-
tance is proportional to the reciprocal of 0, and so is larger for larger values of the
phase at the edge of the pupil.
We can evaluate the incoherent transfer function via the Fourier transform of the
incoherent impulse response or via the scaled autocorrelation of the original pupil.
In the first case, the translation of the incoherent impulse response produces a linear
phase in the OTF (autocorrelation of the pupil):
H2 [] = F1©|2 []|2ª =
⎡⎣ ³0
02
´⎤⎦ · exp
⎡⎣+ · 2 · ³002
´⎤⎦
=
⎛⎝
⎡⎣ ³0
02
´⎤⎦ · cos
⎡⎣2 · ³002
´⎤⎦⎞⎠+ ·
⎛⎝
⎡⎣ ³0
02
´⎤⎦ · sin
⎡⎣2 · ³002
´⎤⎦⎞⎠
This same result may be evaluated via the autocorrelation of the pupil, but the math
is a bit more tedious.
The magnitude of the autocorrelation of this translated impulse response has the

422 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
same form as that of the unaberrated MTF:
|H2 []| = |H1 []| =
⎡⎣ ³0
02
´⎤⎦
If the phase introduced by the tilt is a quarter wave, this determines the value for
scaling length 0 that will not produce a visible difference to the image compared to
the original image:
max =2
4=
2= 2
max
0= 2 ·
¡02
¢0
=⇒ 0 = 40
If the phase introduced by the tilt is larger, then the impulse response moves farther
from its unaberrated location, but still has the same “shape.”
The graphical examples are evaluated for the case 0 = 2 units and 0 =12, so
that the phase at the edge of the pupil is 4 radians:
2 [] = h2
i· exp [+ · 2 · 2 · ]
2 [] = 2 · [2] ∗ [ + 2]
2 [] ∝
"+ 202¡
022
¢ #=
"¡
022
¢# ∗ [+ 202]h2 [] = |2 []|2 ∝ 2
"+ 202¡
022
¢ #= 2
"¡
022
¢# ∗ [+ 202]2 [] ∝
∙−022
¸=
⎡⎣ ³2
02
´⎤⎦
H2 [] =
⎡⎣ ³2
02
´⎤⎦ · exp [− · 2 · 202 · ]
1-D Pupil with Two Tilts
Now consider a variation on the previous case where the pupil function has a “negative
tilt” for 0 and a “positive” tilt for 0. The phase at the edges of the pupil¡ = ± 0
2
¢is max = 2
020:
3 [] =
∙
0
¸· exp
∙+ · 2 · ||
0
¸This situation may be created by placing a symmetric prism at the center of the pupil
such that the phase delay is smallest at the center:

11.5 MONOCHROMATIC ABERRATIONS 423
Figure 11.45: 1-D pupil with 4 radians = 2 waves of tilt at the edge of the pupil: (a)
real part, (b) imaginary part, (c) magnitude, and (d) linear phase.

424 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.46: Incoherent transfer function of system with pupil including a linear
phase. The MTF is the ideal triangle with the linear phase.

11.5 MONOCHROMATIC ABERRATIONS 425
Figure 11.47: Impulse responses with and without tilt, showing that the only impact
of the tilt term is a translation of the impulse response.
We can split the pupil into pieces for ±:
3 [] =
"+ 0
4¡02
¢ # · exp ∙− · 2 · 0
¸+
"− 0
4¡02
¢ # · exp ∙+ · 2 · 0
¸
=
Ã
"¡02
¢# ∗ ∙+ 0
4
¸!· exp
∙− · 2 ·
0
¸
+
Ã
"¡02
¢# ∗ ∙− 0
4
¸!· exp
∙+ · 2 ·
0
¸Since the two halves are each half as wide as the full aperture, each produces a
function in the coherent impulse response that is twice as wide as that from the full

426 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
aperture. The two linear phases translate the functions in opposite directions:
3 [] =
⎛⎝ |0|2
⎡⎣ ³20
´⎤⎦ · exp ∙− · 2 · · 0
4
¸⎞⎠ ∗ ∙ + 1
0
¸
+
⎛⎝ |0|2
⎡⎣ ³20
´⎤⎦ · exp ∙+ · 2 ·µ + 1
0
¶· 04
¸⎞⎠ ∗ ∙ − 1
0
¸
=|0|2
⎡⎣ + 10³
20
´⎤⎦ · exp ∙− · 2 ·µ + 1
0
¶· 04
¸
+|0|2
⎡⎣ − 10³
20
´⎤⎦ · exp ∙− · 2 ·µ − 1
0
¶· 04
¸
=|0|2
⎡⎣ + 10³
20
´⎤⎦ · exp ∙− · 2 ·µ + 1
0
¶· 04
¸
+|0|2
⎡⎣ − 10³
20
´⎤⎦ · exp ∙− · 2 ·µ − 1
0
¶· 04
¸
3 [] = 3
∙
02
¸
=|0|2
⎡⎣ 02
+ 10³
20
´⎤⎦ · exp ∙− · 2 ·µ
02+1
0
¶· 04
¸
+|0|2
⎡⎣ 02− 1
0³20
´⎤⎦ · exp ∙− · 2 ·µ
02− 1
0
¶· 04
¸
=|0|2
Ã
"+ 02
02020
#· exp
"− · 2 ·
Ã+ 02
0
02
!· 04
#!
+|0|2
Ã
"− 02
02020
#· exp
"− · 2 ·
Ã− 02
0
02
!· 04
#!
which is the sum of two translated functions to opposite sides of the origin
of coordinates, each with a linear phase term in opposite directions. The incoherent
impulse response is the squared magnitude, which may be approximated as the sum

11.5 MONOCHROMATIC ABERRATIONS 427
of two 2 functions displaced to either side of the origin by the same distance:
h3 [] ≈ 2
"
2020
#∗µ
∙− 02
0
¸+
∙+
02
0
¸¶The corresponding MTF is the 1-D Fourier transform, which is a triangle of width de-
termined by the aperture size modulated by a cosine function with period determined
by the phase change at the edge of the pupil
H3 [] ≈
⎡⎣ ³0
202
´⎤⎦ · cos
⎡⎣2 · ³002
´⎤⎦
If the phase at the edge of the pupil is 2radians (one quarter of 2 radians corre-
sponding to a full cycle, and so is a “quarter of a wave”), then the condition on 0is:
2 ·¡02
¢0
=
2=⇒ 0 = 20
The two 2 functions in the impulse response overlap, and the impulse response
is:
h3 [] ≈ 2
"
2020
#∗µ
∙− 02
20
¸+
∙+
02
20
¸¶so the separation of the two 2 functions is 1
4of their widths, which means that
the two will “blend together to give the appearance of a single function.
If the phase at the pupil is larger than the Rayleigh rule, then the two 2
are “mostly” disjoint, so two images are created from the pupil.
The first example includes a phase error of 4 radians (“two waves”) at the edge
of the pupil. The pupil function as real part, imaginary part, magnitude, and phase
is shown in Fig.(11.48). The transfer function and psf are shown in Fig.(11.49).
In a second example, the maximum phase error is 2radians, or one-quarter of a
wavelength.
1-D System with Defocus
A more relevant phase error is the quadratic, so that the 1-D pupil function has the
form:
4 [] =
∙
0
¸· exp
"± · ·
µ
0
¶2#where 0 is again the “chirp rate,” the distance along from the origin that produces
a phase change of radians.

428 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.48: The pupil function including two tilt terms: (a) real part, (b) imaginary
part, (c) magnitude, and (d) phase, with maximum error of 4 radians at the edge
of the pupil. The two linear phases create two different “tilts.”

11.5 MONOCHROMATIC ABERRATIONS 429
Figure 11.49: (a) transfer function and (b) impulse response of the optical system
with pupil with two sections of linear phase. The impulse response consists of two
wider 2 functions that are displaced from the origin.
The Fourier transform of the pupil function is:
4 [] ≈ |0| ·⎡⎣ ³
020
´⎤⎦ · exp h±
4
i· exp £∓ (0)2¤
After remapping back to the space domain, the impulse response is:
4 [] ∝
⎡⎣ ³02020
´⎤⎦ · exp h±
4
i· exp
⎡⎣∓⎛⎝ ³
020
´⎞⎠2⎤⎦
h4 [] ∝
⎡⎣ ³02020
´⎤⎦
H4 [] ∝
⎡⎣ ³20
020
´⎤⎦
Max phase error = 2=⇒ 0 =
02√2
4 [] =
∙
0
¸· exp
⎡⎣± · 2·Ã
¡02
¢!2⎤⎦

430 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.50: Pupil function with two linear phases and maximum phase error of 2
radians at the edge of the pupil: (a) real part, (b) imaginary part, (c) magnitude, and
(d) phase in units of radians.

11.5 MONOCHROMATIC ABERRATIONS 431
Figure 11.51: (a) MTF of system with two linear phases and maximum phase error
of 2at edge of pupil; (b) impulse response of aberrated system (red) compared to that
of unaberrated system (blue), showing that the Strehl ratio D ∼= 08.
4 [] ∝
⎡⎣ ³80
´⎤⎦ · exp h±
4
i· exp
⎡⎣∓⎛⎝ ³
80
´⎞⎠2⎤⎦
1-D System with Shift-Variant Coma
5 [; 0 ] =
∙
0
¸· exp £± · 2 ·131 · 3 · 0 · cos []
¤Note the two additional parameters: the image height 0 and the angle . In
other words, the impulse response now depends on the image height and is therefore
not shift invariant.
1-D System with Random Phase
6 [] =
∙
0
¸· exp [± · 2 · []]
where [] is a number selected from a uniform random distribution over the interval
min ≤ ≤ max. If min = −max = 14, then the maximum phase error is max =
2
radians. The pupil function is shown in Fig.(11.52) and the MTF and psf are shown
in Fig.(11.53)
1-D System with shift-variant Coma
7 [] =
∙
0
¸· exp £± · 2 ·131 · 3 · (0 · cos [])
¤

432 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.52: Pupil function with random phase with maximum excursion of 2radi-
ans: (a) real part, (b) imaginary part, (c) magnitude, (d) phase.

11.6 ZERNIKE “CIRCULAR” POLYNOMIALS 433
Figure 11.53: MTF and psf of pupil with maximum phase error of 2radians, showing
that D ∼= 08
In the 1-D case, there is no analogue to , but we can substitute different values
for 0 · cos [] to visualize profiles of the corresponding “impulse response” (which isshift-variant).
2-D System with Defocus
The same comparison for a quarter wave of spherical aberration is shown in Figure
(11.54); the Strehl ratio is D ≈ 081, which implies effectively ideal imaging.
11.6 Zernike “Circular” Polynomials
It should be no surprise that useful decompositions of the wavefront errors exist
other than the Seidel aberrations. These measure the amount of wavefront error
projected onto different sets of basis functions. The Zernike polynomials are the most
common alternative set; these often are used for fitting data from interferometric
optical testing (though NOT in the presence of air turbulence; Zernikes have little
value in this situation). They were derived by Fritz Zernike in 1934 (“Beugungstheorie
des Schneidenverfahrens und seiner verbesserten Form, der Phasenkontrastmethode,”
Physica, 1, p.689, 1934).
The Zernike polynomials are functions of radial and azimuthal coordinates that
describe “surfaces” on the unit circle such that the average value of each is zero. The
basic forms may be written in complex or real-valued forms:
( ) =
() · exp [ · · ]=
() · (cos ( · ) + · sin cos ( · ))

434 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.54: Comparison of (a) diffraction-limited psf from f/10 clear-aperture
system and (b) with a quarter wave of spherical aberration, along with the corre-
sponding profiles of the psfs are shown respectively in (c) and (d). The Strehl ratio
D ≈ 081,which again lies nicely in the range of “ideal imagery.”

11.6 ZERNIKE “CIRCULAR” POLYNOMIALS 435
( ) =
() · cos ( · ) (11.60)
− ( ) = () · sin ( · ) (11.61)
where the domains of the radial part is ≤ 1 and of the azimuth angle is the unitcircle of 2 radians. These have a property of orthogonality over the unit circle:Z =2
=0
Z =1
=0
¡ ( )
¢∗ · ( ) · · · =
+ 1
where the “Kronecker delta” is defined:
=
⎧⎨⎩ 0 if 6=
1 if =
The radial part of each polynomial is specified for ≥ :
() =
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩(−)2X=0
(−1) (− )!
! ·µ+
2−
¶! ·µ−
2−
¶!
· −2 if − is even
0 if − is odd
(11.62)
These satisfy a variation of the orthogonality relation:Z =1
=0
() ·
() · =1
2 · (+ 1) (11.63)
Examples of functional forms of the radial parts include:
00 () =0!
0! · 0! · 0! · 0 = 1 () =⇒ 00 ( ) = 1 () · cos (0 · ) = 1 ()
11 () =(−1)0 · 1!0! · (0)! · (0)! ·
1 = =⇒ 11 ( ) = · (cos () + · sin cos ())
02 () =
1X=0
(−1) (− )!
! ·µ+
2−
¶! ·µ−
2−
¶!
· −2
=2!
0! · 1! · 1!2 +
(−1) · 1!1! · 0! · 0!
0 = 22 − 1
22 () =2!
0! · 2! · 0! · 2 = 2

436 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
04 () =
2X=0
(−1) (4− )!
! ·µ4
2−
¶! ·µ4
2−
¶!
· 4−2
=4!
0! · 2! · 2!4 − 3!
1! · 1! · 1!2 +
2!
2! · 0! · 0!0
= 64 − 62 + 1
≤ ()
0 0 00 () = 1
1 1 11 () =
2 0 02 () = 22 − 1
2 2 22 () = 2
3 1 13 () =
3 3 33 () = 3
4 0 04 () = 64 − 62 + 1
4 2 24 () = 42 − 32
4 4 44 () = 4
One property of the Zernike polynomials is that distinct polynomials are orthogo-
nal over the unit circle (i.e., the scalar product of any pair of distinct Zernike polyno-
mials vanishes):where is the Kronecker delta function, which is (loosely speaking)
a discrete analogue of the Dirac delta function. It may be useful to confirm this for
a couple of cases:Z =1
=0
04 () ·24 () · =Z =1
=0
¡64 − 62 + 1¢ · ¡42 − 32¢ ·
=
Z =1
=0
¡67 − 65 + 3
¢
= 0
Z =1
=0
04 () ·44 () · =Z =1
=0
¡64 − 62 + 1¢ · ¡4¢ ·
=
Z =1
=0
¡69 − 67 + 5
¢ = −23
60
The set of the first 36 (nonconstant) Zernike polynomials yields a decomposition
with minimum RMS wavefront error. Since they all represent wavefront errors at the
exit pupil, the corresponding impulse responses and transfer functions may be calcu-
lated; the former are shown in Figure (11.56). JimWyant of the University of Arizona

11.6 ZERNIKE “CIRCULAR” POLYNOMIALS 437
Figure 11.55: First 28 Zernike polynomials ordered by az-
imuthal index (horizontally) and radial index(vertically). Ref:
http://scien.stanford.edu/class/psych221/projects/03/pmaeda/index_files.
has a dynamic webpage where the wavefront shape may be depicted for any combina-
tion of Zernike polynomials (http://wyant.optics.arizona.edu/zernikes/zernikes.htm)
The various Seidel aberrations may be written in terms of the Zernike polynomials:
Seidel Coefficient Zernike
Spherical Aberration 040 · 4 040 ·04 ()Coma 131 · 3 · 0 · cos [] 131 ·13 () · cos []
Astigmatism 222 · 2 · 20 · cos2 [] 222 ·22 () · cos [2]Curvature of Field 220 · 2 · 20 220 ·02 ()
Distortion 311 · · 30 · cos [] 311 ·11 () · cos []

438 CHAPTER 11 COHERENT AND INCOHERENT SYSTEMS
Figure 11.56: psfs (impulse responses) of the aberra-
tions for each of the first 28 Zernike Polynomials (ref:
http://scien.stanford.edu/class/psych221/projects/03/pmaeda/index_files/image096.gif)