
c o n t i n u i n g e d u c a t i o n f o r a p p l y i n g c o n t r o l t h e o r y to Automobiles...
6
Pergamon 0967-0661 (95)00053-4 Control Eng. Practice, Vol. 3, No. 5, pp. 723-727, 1995 Copyright © 1995 Elsevier Science Ltd Printed in Great Britain. All fights re~'ve d 0967-0661/ 95 $9.50 + 0.00 CONTINUING EDUCATION FOR APP LYING CONTROL THEORY TO AUTOMOBILES AT TOYOTA H. Kousaka*, M. Yamashita*, Y. Hirano**, A. Ohata** and S. Ijichi* *Toyota Mo tor Corporation, Aichi 471, Japan **Higashi-Fuji Technical Center, Toyota Motor Corporation, Susono, Shizuoka 410-11, Japa n (Received September 1994; in final form March 1995) Abstract: Since 1990, the Toyota Motor Corporation has been conducting internal education programs on control technology for its engineers, using the MATLAB and inverted pendulum experimental devices. With three years of experience, some major complaints were voiced concerning these programs, such as "not practical", or "not helpful to understand the basic theory of control". As countermeasures for these prob- lems, SIMULINK has been introduced as a new tool for constructing models easily. "One-year Project" has also been started which enables the participants to solve the problems they face in their daily work with the help of university researchers and Toyota's experts. Ke y Words: Automobiles; Education; Optimal control; Ro bust control; Adaptive con- 1. INTRODUCTION Vehicles, which are Toyota's products, consist of countless technologies. With the rapid progress and expansion of automobile technologies, there are some areas where the individual engineer or group has diff- culty in obtaining new skills as a result of their own efforts. In order to encourage engineers to obtain the new skills which were required in various depart- ments, but which had not yet been acquired in spite of their importance, the company started its own "Tech- nical Education Programs". At present, there are three courses; "Electronics", "Materials" and "Control". Each course consists of lecture sessions, given by University researchers, and training sessions, led by internal experts. The dura- tion varies from three to twenty-five days. The cur- riculums are studied and decided through meetings be- tween representatives of the departments concerned and the University researchers. The opinions of par- ticipants are collected after the programs, and are re- flected in the next year's programs. The Control Course started in 1990 to fulfil the in- creasing need for people skilled in control engineer- ing. For instance, as the legal restrictions on emis- sions and fuel consumption are getting tougher, more- advanced and complicated control technologies are re- quired. Also, as shown in Table 1, various vehicle control system s such as Four Wheel Steering, Traction Control Systems, Anti-lock Braking Systems and Ac- tive Suspensions have been introduced in a very short period, to improve safety and comfort. Today, control technology has a big influence on vehicle performance and production costs. On the other hand, some surveys have Woved that in the company, there are not enough engineers who are able to keep up with the very rapid progress in the area of control technology. With this background, the Control Course started in 1990 to develop engineers who are able to utilize control theories in the actual development of vehicle components. 2. CURRICULUM OF CONTROL COURSES IN TECHNICAL EDUCATION PROGRAMS A lot of vehicle control objects are stable and SISO systems; heuristic methods have therefore often been used in the development of control systems. This means that mathematical models and control theory are not utilized. This type of development procedure is no longer effective in the current situation, where vehicle control must be far more advanced and com- plicated to meet various requirements, such as clean emissions, safety, custom er satisfaction, and cost effi- 7 2 3
-
Upload
muhidin-arifin -
Category
Documents
-
view
212 -
download
0
Transcript of c o n t i n u i n g e d u c a t i o n f o r a p p l y i n g c o n t r o l t h e o r y to Automobiles...

7/27/2019 c o n t i n u i n g e d u c a t i o n f o r a p p l y i n g c o n t r o l t h e o r y to Automobiles at Toyota
http://slidepdf.com/reader/full/c-o-n-t-i-n-u-i-n-g-e-d-u-c-a-t-i-o-n-f-o-r-a-p-p-l-y-i-n-g-c-o-n-t-r-o-l-t 1/5
Pe r g a mo n
0 9 6 7 - 0 6 6 1 ( 9 5 ) 0 0 0 5 3 - 4
Control Eng. Practice,Vol. 3, No. 5, pp. 723-727, 1995Copyright © 1995 Elsevier Science Ltd
Printed in Great Britain. All fights re~ 've d0967-0661/95 $9.50 + 0.00
C O N T I N U I N G E D U C A T I O N F O R A P P L Y I N G C O N T R O L T H E O R YT O A U T O M O B I L E S A T T O Y O T A
H . K o u s a k a * , M . Y a m a s h i t a * , Y . H i r a n o * * , A . O h a t a * * a n d S . I j i c hi *
*Toyota Mo tor Corporation, Aichi 471, Japan
**Higashi-Fuji Technical Center, Toyota Motor Corporation, Susono, Shizuoka 410-11, Japa n
( Re c e i v e d Se p t e m be r 1994; i n f i na l f o r m M ar c h 1995)
Abstract: Since 1990, the To yota M otor Corporat ion has bee n conduc t ing internaleduca t ion p rograms on con t ro l techno logy fo r it s engineers , u s ing the MA TL AB and
inver ted pendu lum exper imen tal dev ices . Wi th th ree years o f exper i ence , som e majo rcompla in t s we re vo iced concern ing these p rograms , such a s "no t p rac t ica l " , o r "no the lp fu l to unders tand the bas i c theory o f con tro l " . As coun termeasures fo r these p rob-l ems , SIM UL INK has been in t roduced as a new too l fo r cons t ruc t ing m odel s eas ily .
"One-year Project" has also been s tarted which enables the part icipants to solve theprob lems they face in the i r da i ly work wi th the he lp o f un ivers i ty researchers and
Toyo ta ' s exper ts .
Ke y Words : Automobi l es ; Educa t ion ; Opt imal cont ro l; Ro bus t con t ro l ; Adap t ive con-trol
1 . I N T RO D U CT I O N
V e h i c l e s , w h i c h a r e T o y o t a ' s p r o d u c t s , c o n s i s t o fcoun t less technologies . W ith the rapid progress andexpans ion o f au tom obi l e t echno log ies , t here a re some
areas whe re the individual engineer or group has di ff -cul ty in obtaining new ski l ls as a resul t of thei r ownefforts . In order to encou rage engineers to obtain then e w s k i l l s w h i c h w e r e r e q u i r e d i n v a r i o u s d e p a r t -
men t s , bu t which had no t ye t been acqu i red in sp it e o fthei r imp ortance, the com pan y s tarted i t s ow n "Tech-
nical Educat ion Programs".
A t p r e s e n t , t h e r e a r e t h r e e c o u r s e s ; " E l e c t r o n i c s " ,"Materials" and "Control" . Eac h course consis ts of
lecture sess ions , g iven by Univers i ty researchers , andtraining sess ions, led by internal experts. The dura-t ion var i es f rom th ree to twen ty - f ive days . The cu r -r i cu lums are s tud ied and dec ided th rough meet ings be-tween rep resen ta t ives o f the depar tmen t s concernedand the Univers i ty researchers . The op in ions o f par -
t icipants are col lected after the programs, and are re-
f lected in the next year 's programs.
The Control Course s tar ted in 1990 to ful f i l the in-creasing need for people ski l led in control engineer-ing. Fo r instance, a s the legal res t r ictions on emis-s ions and fuel consump tion are get ting tougher, more-
advanced and compl i ca ted con t ro l t echno log ies a re re -quired. Also, as show n in Tab le 1 , various vehicle
control system s such as Four W heel Steering, TractionCont ro l Sys tems , Ant i - lock Brak ing S ys tems and Ac-
t ive Suspens ions have been in t roduced in a very shor tper iod , to improve safe ty and comfor t . Today , con t ro lt echno logy has a b ig in f luence on veh ic l e per fo rmance
and product ion costs .
On the o ther hand , som e su rveys have W oved tha t in
the company , there a re no t enough eng ineers who areab le to keep up wi th the very rap id p rogress in the a reaof con t ro l t echno logy . W i th th i s backgroun d , the
Control Course s tar ted in 1990 to develop engineerswho are able to ut i l ize control theories in the actualdeve lopm ent o f veh ic l e compon en t s .
2 . C U R R I C U L U M O F C O N T R O L C O U R S E S I NT E C H N I C A L E D U C A T I O N P R O G R A M S
A lo t o f veh ic l e con t ro l ob jec t s a re s t ab le and SISOsystems; heuris t ic me thods hav e therefore often been
used in the deve lop me nt o f con t ro l sys t ems . Th i s
means tha t mathemat i ca l model s and con t ro l t heoryare no t u ti li zed . Th i s type o f deve lopme nt p rocedure
is no longer effec t ive in the current s i tuat ion, whe reveh ic l e con t ro l mus t be fa r more adv anced and c o m -
p l i c a t e d t o meet v ar ious requ i rement s, such as c l eanemiss ions , safety , custom er sat is faction, and cost eff i -
7 2 3

7/27/2019 c o n t i n u i n g e d u c a t i o n f o r a p p l y i n g c o n t r o l t h e o r y to Automobiles at Toyota
http://slidepdf.com/reader/full/c-o-n-t-i-n-u-i-n-g-e-d-u-c-a-t-i-o-n-f-o-r-a-p-p-l-y-i-n-g-c-o-n-t-r-o-l-t 2/5
7 2 4 H . K o u s a k a e t a l .
E n g i n e C o n t r o l
D r i v e T r a i n C o n t r o l
S u s p e n s i o n C o n t r o l
Table 1 Deve lopm ent of elec t ronic cont ro l in the au tomobi le .
1 9 7 0 1 9 ~I I
* E l e c t r i c F u e l I n j e c t i o n ( l ~ l ) ',! * S p a r k A d v a n C e C O n u ' o l
* A u t o D r i v e
1 ~ 0lip
t
: * K n o c k C o n t r o l
i * V m i a b l e C y l i n d e r C o n t r o l [
• V i t i a b l e I n d u e t i o n , C o n t r o li *Variabld Valv e "timing,' *Lean Bm 'nEngiue ,"
', *ElectronicallyConlrolledT,~msmission EC T)i *Full-thne WD *A ctiv ~ orque Split 4WD
i *Bk~monicHeight Control (EHc)• ElectronicallyM o d ~ Suspens ion lEMS)
• Air su~emdbn TEM S: t A c t i b e S u s p e n d ' o n: : * P k ~ o TEMS
* S p e e d S e i n i n g P S ( O n - o f f s o l e n o i d ) ',: *Progressive S (Line~ solenoid)
P o w e r S t e e ri n g ( P S )
4 W h e e l S t e e ri n g ( 4 W S )
A n t i - l o c k B r a k e ( A B S )
T r a c t io n C o n t r o l ( T R C )
I
* R ~ W h eelAB SI
* 4 W l ~ l A B S
c iency . How ever , s ince vehic le cont ro l sys tems canbe des ign ed by heur is t ic me thods to som e ex ten t , the
enginee r s gene ra l ly do wi thou t cont ro l theory . To
improve th is s i tua t ion , two courses were p lanned asfo l lows .
T h e B a s ic C o u r s eThis w as p lanned to teach the bas ic procedures for de -
s ign ing cont ro l sys tems, such as "M ode l ing =~ Ident i -f ica t ion =~ Contro l le r Des ign ~ S imula t ion" , and howto use the la te s t des ign too ls .
T h e A d v a n c e d C o u r s e
T h i s w a s p l a n n e d t o p r o m o te u n d e r s t a n d in g o f t h e l a t -
e s t cont ro l theor ie s .
Both cou rses inc lude not on ly the lec ture sess ions , bu ta l s o t ra i n in g s e s s io n s u s in g MA T L A B ( Ma th W o r k s
Inc . , 1992a) and inve r ted pendulum exper imenta l de -v ices , r e fe r red to he re a s IPED. The IPED was se -lec ted because i t i s easy to handle , and i t s f eedback
ef fec ts a re v is ib le . I t i s gene ra l ly r ecognized a s themost popula r expe r imenta l device for cont ro l theorye d u c a t io n . I t p r o v id e s a c o mm o n o b j e c t w h ic h c an b e
used to teach cont ro l theory to enginee r s f rom va r iousa reas : pow er t r a in , chass is , f ac tory enginee r ing , and soOff .
In most vehic le cont ro l sys tems, two-degree -of - f r ee -
d o m c o n t r o l le r s w i th f e e d f o r w a r d a n d f e e d b a c k a r eused . Such cont ro l le r s a l so inc lude comp ensa t ion fornonl inea r i t ie s and t ime-de lays , such a s ga in schedul -i n g me th o d s , a n d l e a r n in g a n d a d a p t i v e f u n c t i o n s .Usu a l ly , cont inuou s ac tua tor s a re se ldom used as con-
t ro l devices , and d isc re te ac tua tor s wi th only a f ewmo des ( such as on-o f f va lves) a re adopted ins tead . In
*HydraulicP~aefionPS*ElectrictllyactuatedPump PS
*EleoCr6mnguetk:M O ~ PS
* N i s u m H1CA~*Mazda 4W~
* T o ~ t a 4W S*,'Niuan Super-HICA S
' *ToyotaActive4W Si ( y a w rate feedback)li
* 4 W D ' , A B S
*TRC (Engine) :* T R C ( E n g i n e & T h r o t t l e )* T R C ( E n g i n e & B r a k e )
m any cases , the num ber of s ta te va r iab les i s impl ic i t ly
reduced by s l id ing sur face , and case c la ss i f ica t ion i s
done by i f -then log ic . There fore , r egula tor s such as
L in e a r Q u a d r a t ic m e th o d s c a n n o t h a n d l e a l l t h e c o m-pl ica ted vehic le cont ro l sys tem s. To des ign exce l len t
c o n t r o l s y s t e m s , t h e f o l l o w i n g c o n t e n t s s h o u l d b ec lea r ly unders tood .
Ana lvs is of the cont ro l ob jec ts
T h i s i n c lu d e s d e c id in g t h e c o n t r o l g o a l s , s t u d y in g t h ed i s t u r b a n c e c h a r a c t e r i s t i c s , m o d e l i n g t h e o b j e c t s ,ident i f ica t ion of pa ramete r s a nd unce r ta in t ie s , and so
o n .
D e s i ~ o f t h e c o n tr o ll e r
T h i s c o v e r s d e c i s io n s c o n c e r n in g e s t ima to r s a n d r e g u -
la tor s , and the des ign of pre /pos t compensa tor s , in -c luding the f eed forward and l inea r iza t ions .
A n a ly s i s o f t h e c o n t r o l s y s t e ms
T h i s m e a n s t h e e v a lu a t i o n o f p e r f o r ma n c e a n d r o b us t -
n e s s i n c lo s e d - lo o p s y s t e ms , a n d s o o n .
Table 2 Con ten ts of the cur r icu lum.
B u i c C o u r s e
f~3nte~lt Pertod
• ntroduc tion. O.b day
• H o w t o u s e M A T L A B . 0 . 5
•P rogra m m ing a r e a l - t im e c on t ro l le r . 2
• De s ign o f a n L Q c on t ro l le r , a nd im ple m e nta t ion . 2
A d v a n c e d C o u r s e
t~3fltent l.~tio~i
•Linem" contro l theor y. 2 c lay
•R o b m t c o n t r o l t h e o r y . 2
•Fe e dba c k l ine a r iz a t ion . 1
•S l id ing c on t ro l . 1
• Ada p t ive c on t ro l . 1
•Fuz z y c on t ro l . 1

7/27/2019 c o n t i n u i n g e d u c a t i o n f o r a p p l y i n g c o n t r o l t h e o r y to Automobiles at Toyota
http://slidepdf.com/reader/full/c-o-n-t-i-n-u-i-n-g-e-d-u-c-a-t-i-o-n-f-o-r-a-p-p-l-y-i-n-g-c-o-n-t-r-o-l-t 3/5
A p p l y i n g C o n t r o l T h e o r y t o Automobiles 725
F r o m t h e a b o v e c o ns i de r at i on s , a s s h o w n i n T a b l e 2 ,
t h e c u r r i c u l um w a s d e s i g n e d t o c o v e r m a n y a r e a s o f
vehicle control technologies w i t h o u t becoming exces-sively in-depth.
3. EVALUATION OF CONTROL COURSES
ply what they had learned.
From the above evaluation, it was felt that it would bemore effective for both the participants and the i n -
s t r u c t o r s to study examples of actual problems towhich c o n tr o l t h e g n / m a y be applied.
In both the Basic Course and the Advanced Course,the number of participants is limited to ten respec-tively, so that each pa~icipant has his/her own training
device. Each course was held twice per year.
After three years of experience, it has become clearthat the Basic Course is very effective in teaching thep r o c e d u r e o f d e s i g n i ng v e h i c l e c o n u ' o l systems. Inthe Advanced Course, however, most of the partici-pants complained that the contents cannot be appliedto their daily jobs. Especially, the onderstanding ofthe theories was very poor even though the partici-
pants concentrated on learning these theories in thecurriculum. Some participants reported that theycould not keep up with the curriculum and they had theimpression that the control theories are too difficult.
4. M O D I F I C A T I O N OF THE ADVANCEDCOURSE
In order to improve the above si ~t io n, the program ofthe advanced course was modified in 1993. Timeschedule of the course is shown in Table 3. The tenparticipants are divided into three groups, and each
group has its own university researcher as a tutor forboth sessions.
Lecture with PracticeBasically, the first half of this program is designed to
teach how to use the linear control theories, especiallyLQG methods. The latter half is an attempt to putmore emphasis on robust control, nonlinear controland intelfigent control.
In actual applications, MIMO systems are seldomtreated, and even in SISO systems, high-order dynam-ics in the plants are usually ignored. Since the pro-gram covers these subjects, it may be unnecessarilycomplicated.
Furthermore, many participants tend to think thatsince many nonlinearities exist in vehicle systems, ba-
sic linear control theory is useless in their daily work.Although controllers and pre/post f'flters should be si-multaneously designed, they tend to think that theseare completely separate issues. Before applying ro-bust con~ol, they also tend to think that compensationfor the variations of the plant should be covered bycomplex learning and adaptive functions.
Thus, this lack of understanding prevents the partici-pants from applying the control theories in their dailywork. The IPED might be considered the cause of thisproblem. Some participants said that training deviceslike the IPED are too far from what they actually use in
their work, therefore making it difficult for them to ap-
To solve the problem that the theory is too difficult toabsorb in a short period of time, the duration was pro-longed from two days to four days, concentrating more
on LQG methods. Also, the SIMULINK (MathWorks Inc., 1992b) was introduced to reduce the loadof model construction.
This is planned to solve problems which simulate theactual control objects that the participants face. It ishoped that the project will become mote like coopera-tive research, performed by the universities andToyota. Project themes are collected from the partici-pants, and categor ized into three group them es . Each
group has its own group leader, and he finally decideswhat the group will do, through meetings with the tu-
tor.
The themes in 1993 were;• Anti-lock Braking System (ABS),• Four Wheel Steering (4WS),
• Engine Control System for Air-Fuel Ratio.
Table 3 Time schedule of new advanced course.
Lecture with PracticeM a y
A u g . •Trends and Problems of Vehicle Control.•CAD for C~trol Systems.•Analysis of Conlxol Object.•Design of Controller.•Analysis of Control System.
S e p .
N o v . • F u z z y Co n t r o l T h e o r y .
• o b u s t C o n t r o l T h e o r y .
• d a p t i v e C o n t r o l T h e o r y .
Dec.
One-Year Project•Choice of Theme Candidates in the Corporation.
•Determinating Themes and Goals with University Researchers.•Starting Projects with Lectures. (One Hour per Day)
•Continuing Projects in Each Group.
•Reporting Previous Results.•Modification Acc~din_g to Suggestions by Researchers.•Continuing Projects with Lectures. (One Hour per Day)
• o n t i n u i n g P r o j e c t s i n E a c h G r o u p .
•ReportingF ' m a l R e s u l t s .

7/27/2019 c o n t i n u i n g e d u c a t i o n f o r a p p l y i n g c o n t r o l t h e o r y to Automobiles at Toyota
http://slidepdf.com/reader/full/c-o-n-t-i-n-u-i-n-g-e-d-u-c-a-t-i-o-n-f-o-r-a-p-p-l-y-i-n-g-c-o-n-t-r-o-l-t 4/5
7 2 6 H . K o u s a k a e t a l .
The instructors had to perform ex tensive preparationto adopt the control theories to these items, while thepar t i c ipan t s a l so had to spend much t ime on these
proje cts in addition to lecture sessions. As this pro-gram requ ires a lo t of addi tional work from b oth theinstructors and the participants, i t must be ensure d that
the ski l l s and know ledge obtained are useful. There-fore, i t was decided that at the end of the program,each g roup w ould repo rt their results to their managersand the Tutor Pro fessor, in the form of a presentation.
5 . R E S U L T S O F O N E - Y E A R P R O J E C T
Four Wheel Steering (4WS)The 4WS group t r ied to design a layered control lerconsis t ing of a m odel-fol lowing control ler in the main
loop and an LQG con t ro l l e r i n the minor loop , asshown in Figure 3 . Figure 4 shows the s tep responsesof the rear whee l angles for the case that the two types
of commands (0 .25, 1 .0 [deg]) are input to the per-turbed plant . The remarkable imp rovem ent was con-fh'med in the minor loop of the rear steering actuator.This resul ts indicated that the closed-loop system s sat-is f ied some specif icat ions for perform ance and robust-n e s s .
This sect ion shows the technical resul ts of the One-Year Pro jec t as exam ples .
Ant i - lock Brak ing Svs tem lAB S)The AB S group des igned con tro l sys tems fo r a wel l -known quar te r -car model , wh ich invo lves the dynam-
ics of actual hydraul ic actu .a t0~. Figure 1 show s theblock diagram of the control system. Using the poleass ignme nt m ethod, a control ler to compen sate for s l ipra t io was des igned . From the s imula t ion resu l t sshow n in Figure 2 , i t has been confi rmed that the s l ip
rat io was co ntrol led to the peak value (0 .15) fo r th is
road.
Actua ting T im e [-I
VehicleI W h ee lngular Velocity
A c t u a t o r Vehic~
l Con troU~ f R ~ c eMinorLaop
Rc41ulatotofM ~ Loop Ot~erve~
Yaw RIt*
s ~ ~
s ~
Fig . 3 Block d iag ram of con tro l sys t em fo r 4WS(Four-Wheel Steering System).
. . •ontrol ler of [ 4 - - I Control ler ofHydraulic Pressure | - I Slip Ratio
| L ] Est imator ofVehicle Model ~ Ma sterPressure
Estimator of
~.-S Cha racteristic
Fig . 1 Block d iag ram of con t rol sys t em fo r ABS
(Anti - lock Braking Sy stem).
i t , ~ - . - - - ~ ~ e V eloc ity ......4 ...........
dine Oee)
0.3 , , ,
0 0 .2 0 ,4 0 .6 0 .1 1 .2 1 .4 L 6 1 .1 l(u :,O
Fig. 2 Tim e responses of longi tudinJal veloci t ies and
slip ra tio due to braking.
1.2
1
0
0. 6
<"-d0 13.4
~ 0.2
0
-0.2
Com mand """ Uncontrolled
../':' / Uncontrolled
i A " , Contro|ledC o m m a n d
0 0.0.$ 0.1 O. IS 0.2 0.25 0.3 0.35 0.4 0.45
time (see)
Fig . 4 T ime responses o f rear wheel ang les on
perturbed plant .
0.3
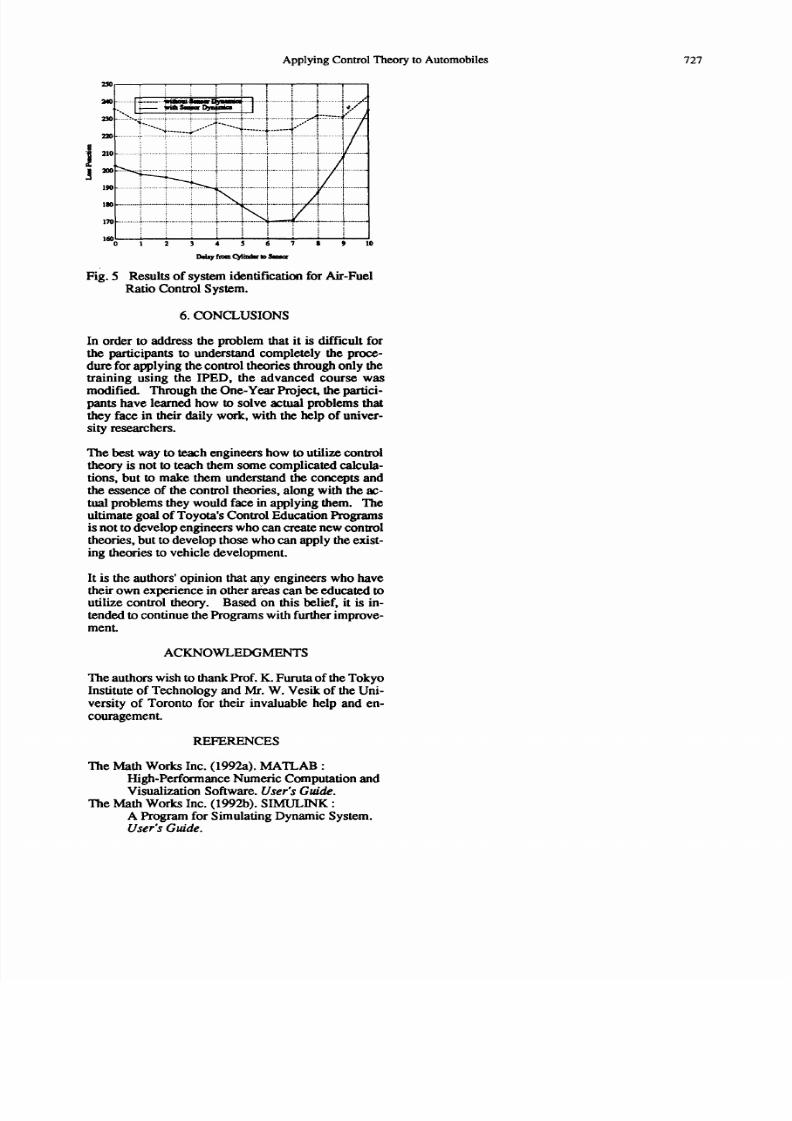
Engine Control S ystem for Air-Fuel R at ioBe fore control ler design, the Engine group identi fied amo del wi th t ime d elay from the cyl inder to the air-fuel
rat io sensor, us ing leas t -square method s. Figure 5show s the resu l t s o f sys t em iden t if i ca tion . In the
model wi th sensor dynamics , t he los s func t ion de-creases dras t ical ly , compared wi th the model wi thoutsensor dynamics . Therefore, th is resul t suggests thatthe mo del us ing s ix delays and senso r dynamics is the
mo st sui table for co ntrol ler design.
7/27/2019 c o n t i n u i n g e d u c a t i o n f o r a p p l y i n g c o n t r o l t h e o r y to Automobiles at Toyota
http://slidepdf.com/reader/full/c-o-n-t-i-n-u-i-n-g-e-d-u-c-a-t-i-o-n-f-o-r-a-p-p-l-y-i-n-g-c-o-n-t-r-o-l-t 5/5
A p p l y i n g C o n t r o l T h e o r y t o A u t o m o b i l e s 7 2 7
Fig. 5
250 , , , r =
~ o [ ... . . . .. . .~ ... . .. . . . .. . .~ .............................................. ..............~ ... .. . . .. . . .. --..- .~ .- ' : :~ .... . .. . .
i /2 1 0 . . . . . . . .. . . . . . . ) - . . . . . . . . . . ~ - . . . . . . . . . . .. . ~ . . . . . . .. . . . . . .. [ . . . . . . .. . . . . . . . ~ . . . . . . .. . . . . . .. . . . . . . . . . . . . .. . ~ - . . . . . . . . . .. . . r . . . . . . ] -
i ! I ) ~ I l lFF-, , , ~ ~ . .. . .. . . .. . .. . . .. . .. .. . .. . ~ . .. .. . .. .. . . ~ . . . . . . . .. . . . . . . . . . . ~ . . .. . . .. . .
, . . . . . . .. . . . . .. . . . . . . .. . . . . . . ..
i i i i i ! : i I
i i ) ' i ~ '160 0 3 4 $ 6 7 | 9 10
I M a y ~ o y l i m ~ ~ $ m f f i
Re sul ts of system ident if icat ion for Air-Fuel
Rat io Con t ro l Sys tem.
6 . C O N C L U S I O N S
In order to address the problem that i t i s d i ff icul t forthe part icipants to unders tand com pletely the proce-dure fo r applying the control theories through o nly thet r a i n i n g u s i n g t h e I PE D , t h e a d v a n c e d c o u r s e w a smod ified. Through the One -Ye ar Project , the part ici -
pan t s have l earned ho w to so lve ac tua l p rob lems tha tthey fac e in thei r dai ly wo rk, wi th the help of univer-sit), researchers.
The bes t way to t each eng ineers how to u t il ize con t ro ltheory i s no t to t each them som e compl i ca ted ca lcu la -t ions , bu t to ma ke them unders tand the concep t s and
the essenc e of the control theories , along w ith the ac-tua l p rob lems they would face in app ly ing them. Theu l timate goa l o f Toyo ta ' s Con t ro l Educa t ion Programsi s no t to deve lop eng ineers who can c rea te new con t ro ltheor ies , bu t t o de ve lop those w ho can app ly the ex i s t -ing theories to vehicle developm ent .
I t i s the authors ' op inion that a~y engineers w ho havethe ir ow n exper i ence in o ther a / eas can be educa ted tout i l ize control theory. Ba sed on this bel ief , i t i s in-t ended to con t inue the Programs wi th fu r ther improve-ment .
A C K N O W L E D G M E N T S
The au thors w i sh to thank Pro f . K . Furu ta o f the Toky o
Inst itut e o f Techno logy and M r . W. V es ik o f the Uni -vers i ty o f Toron to fo r the ir i nva luab le he lp and en-
couragement .
R E F E R E N C E S
The M ath Works Inc . (1992a) . M AT LA B :
High-Per fo rmance Num er ic Computa t ion andVisualization Software. User's G uide.
The Math W orks Inc . (1992b) . SIMU LIN K :
A Program fo r S imula t ing Dyn amic Sys tem.User's G uide.


















