BTP - Final(335,340)_final
21
DESIGN DEVELOPMENT AND CONTROL OF A 3-PPR MANIPULATOR V. Vinoth(1100335) Y. Ravi Kiran(1100340) Indian Institute of Technology - Indore Guide : Dr. M. Santhakumar
-
Upload
vinoth-venkatesan -
Category
Documents
-
view
218 -
download
2
description
Design and development of a 3-PPR Manipulator
Transcript of BTP - Final(335,340)_final
-
DESIGN DEVELOPMENT AND
CONTROL OF A 3-PPR MANIPULATOR
V. Vinoth(1100335)
Y. Ravi Kiran(1100340)
Indian Institute of Technology - Indore
Guide : Dr. M. Santhakumar
-
Introduction
What are serial and parallel mechanisms and how is one superior to the other?
What are XYz planar platforms and what is their need?
What this project proposes?
Advantages and limitations of the proposed planar platform used here.
-
Project Plan
15-May 21-Jun 28-Jul 03-Sep 10-Oct 16-Nov
Literature review
CAD Modelling
Refinement of the model and detailing
Kinematic modelling
Dynamic modelling
Kinematic simulations and feasibility analysis
Material Selection and Design Optimatization
Fabrication
Controller Design
Numerical simulations
Sensor selection and calibration
Experimental simulation and validation
Report Completion and Submission
-
Construction and Visualization
Solid model of the manipulator Kinematic link Parameters
-
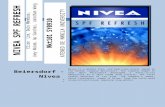
Fabricated Prototype
1
4
3
2
6
5
1. Control Scheme
2. Camera
3. Power Supply
4. Controller
5. Linear Actuator
6. End-effector
-
Comparison Workspace
-
Comparison Performance Parameters
Manipulability Resistivity
Isotropy
-
Kinematic Modelling
The kinematic analysis refers to the development of relations
between the position (x and y) and orientation () of the end-
effector/work table (task space parameters) and the joint space
parameters (in this case r1, r2 and r3).
-
Dynamic Modelling
The dynamic model of the proposed platform is developed using
the Euler-Lagrangian formulation method based on the kinetic
and potential energies associated with the system.
The Lagrangian term, L = KE PE ;
i
ii
d KE KEf
dt dd
disCM ,
-
Control Scheme
-
Real-time controller
-
Numerical Simulations Trajectory Tracking
Desired Trajectory - explained Trajectory Tracking - Simulations
-
Simulation Results
Task space
data during
tracking
Task space
error during
tracking
-
Time histories of the linear actuator control inputs (voltages) during
desired trajectory tracking experiment
Simulation Results
-
Equations for Reference
),()~sign(dt
dsign)(
21 CKKM
dcon
discon
CLLM
L
),()~sign(dt
d)(
1 con
dis
)~sign(~
Control equation
Disturbance
Observer
PD like adaptive sliding mode control
-
Applications
(Industrial)
-
Applications (Medical Robot)
-
Conclusions
This project addressed the dynamic analysis
of an existing three degrees of freedom (3-
PPR) planar robotic parallel manipulator and
proposed a disturbance observer based
sliding mode control scheme.
This work can be extended easily for spatial
parallel robotic platforms.
-
Visible Output
(1). Robust Disturbance Observer based Sliding Mode Control of
a Planar Parallel (3-PPR) Manipulator, IEEE SCES 14 (Best
Paper Award)
(2). Inverse Dynamics and Control of a 3-DOF Planar Parallel
Robotic (U-Shaped 3-PPR) Manipulator, Journal of Robotics and
Computer Integrated Manufacturing.
-
Thank You!
Questions?
Acknowledgements:
We thank our guide Dr. M. Santhakumar, the
Director, IITI for providing us the
infrastructure, CRC lab, research scholars and
other lab members for intellectual support
and the Central Workshop for helping us in
fabricating the prototype.
This project wouldnt have been possible
without help from all these people.