Big-Data Framework for Electric Vehicle Range Estimation
7
1 Big-Data Framework for Electric Vehicle Range Estimation Habiballah Rahimi-Eichi * , Mo-Yuen Chow * * Department of Electrical and Computer Engineering, North Carolina State University, NC, USA Emails: [email protected], [email protected] Abstract— Range anxiety is a major contributor in low penetration of electric vehicles into the transportation market. Although several methods have been developed to estimate the remaining charge of the battery, the remaining driving range is a parameter that is related to different standard, historical, and real-time data. Most of the existing range estimation approaches are established on an overly simplified model that relies on a limited collection of data. However, the sensitivity and reliability of the range estimation algorithm changes under different environmental and operating conditions; and it is necessary to have a structure that is able to consider all data related to the range estimation. In this paper, we propose a big- data based range estimation framework that is able to collect different data with various structures from numerous resources; organize and analyze the data, and incorporate them in the range estimation algorithm. MATLAB/SIMULINK code is demonstrated to read real-time and historical data from different web databases and calculate the remaining driving range. Keywords—Electric Vehicle, Driving range estimation, Remaining charge estimation, Big-Data Analytics I. INTRODUCTION Electric Vehicles (EVs) are now financially within reach of many American families, yet their adoption rate remains low in the US (3.38 % of new cars were EVs in 2012). Industry research has uncovered that “the anxiety felt by many drivers about the remaining driving range their vehicle can run before the next charge” is a major contributing factor to this low adoption rate [1]. This anxiety is mainly because the current technologies cannot accurately estimate the remaining driving range of EVs. Existing EV remaining range estimation technologies mainly rely on limited collection of data. While some methods put more emphasis on electrochemical behavior of the battery [2], there are others that focus on identifying different driving patterns [3, 4]. Moreover, there are some other approaches that consider more GPS-based and manufacturers-provided data with a simplified EV power train model [5]. Finally, some techniques consider up to nine factors to estimate the driving range of the EV [6]. However, the sensitivity and reliability of the range estimation algorithm changes under different environmental and operating conditions; and it is necessary to have a structure that is able to consider all data related to the range estimation. To accurately estimate the driving range of the EVs, our Big Data based range estimation uses adaptive estimation models along with Big Data Analytics. In this paper, we propose an effective and robust framework to discover and analyze the factors that are important in estimation of the driving range. This framework helps with qualitative demonstration of the relationships between the Range Estimation results and the available data, as well as quantitative evaluation of the relativeness, importance and required precision of different data types to accomplish the estimation. The rest of this paper is organized as follows: section II introduces the big data concept especially related to the range estimation technique; section III describes the range estimation data framework. In section IV, a MATLAB/SIMULINK-based example of the big data range estimation framework is presented; and section V concludes the paper and explains the future work. II. BIG DATA CONCEPT AND RANGE ESTIMATION The amount of data collected in Electric Vehicles has been growing fast because we have many more sensors, higher bandwidth communication systems, and cheaper memory to monitor and measure real-time driving range related data and store the data on the vehicles, in connected clouds, etc. This massive amount of data can have different levels of accuracy, resolutions, and relevance in unstructured ways. Big Data technologies have been emerging to address huge, diverse and unstructured data to substantially improve the overall system performance. With proper use of Big Data concepts and techniques, the remaining driving range estimation of the vehicle can be substantially improved. As described earlier, many available, yet unstructured and growing data exist to provide much better estimates of the vehicle driving range. Different data has been collected from the battery in-situ measurements, state of charge (SOC) estimation, battery manufacturers and models, EV manufacturers and models, driving history, GPS location tracking of the EV, traffic report, weather center, etc. However, some of these factors are more important than others when trying to provide an accurate estimate of range. This assorted data can be categorized into standard, historical, and real-time data. While the standard data is associated with deterministic non-updating phenomena, the
Transcript of Big-Data Framework for Electric Vehicle Range Estimation

1
Big-Data Framework for Electric Vehicle RangeEstimation
Habiballah Rahimi-Eichi*, Mo-Yuen Chow*
*Department of Electrical and Computer Engineering, North Carolina State University, NC, USAEmails: [email protected], [email protected]
Abstract— Range anxiety is a major contributor in lowpenetration of electric vehicles into the transportation market.Although several methods have been developed to estimate theremaining charge of the battery, the remaining driving range isa parameter that is related to different standard, historical,and real-time data. Most of the existing range estimationapproaches are established on an overly simplified model thatrelies on a limited collection of data. However, the sensitivityand reliability of the range estimation algorithm changes underdifferent environmental and operating conditions; and it isnecessary to have a structure that is able to consider all datarelated to the range estimation. In this paper, we propose a big-data based range estimation framework that is able to collectdifferent data with various structures from numerousresources; organize and analyze the data, and incorporatethem in the range estimation algorithm. MATLAB/SIMULINKcode is demonstrated to read real-time and historical data fromdifferent web databases and calculate the remaining drivingrange.
Keywords—Electric Vehicle, Driving range estimation,Remaining charge estimation, Big-Data Analytics
I. INTRODUCTION
Electric Vehicles (EVs) are now financially within reachof many American families, yet their adoption rate remainslow in the US (3.38 % of new cars were EVs in 2012).Industry research has uncovered that “the anxiety felt bymany drivers about the remaining driving range their vehiclecan run before the next charge” is a major contributingfactor to this low adoption rate [1]. This anxiety is mainlybecause the current technologies cannot accurately estimatethe remaining driving range of EVs.
Existing EV remaining range estimation technologiesmainly rely on limited collection of data. While somemethods put more emphasis on electrochemical behavior ofthe battery [2], there are others that focus on identifyingdifferent driving patterns [3, 4]. Moreover, there are someother approaches that consider more GPS-based andmanufacturers-provided data with a simplified EV powertrain model [5]. Finally, some techniques consider up tonine factors to estimate the driving range of the EV [6].However, the sensitivity and reliability of the rangeestimation algorithm changes under different environmentaland operating conditions; and it is necessary to have astructure that is able to consider all data related to the rangeestimation.
To accurately estimate the driving range of the EVs, ourBig Data based range estimation uses adaptive estimationmodels along with Big Data Analytics. In this paper, wepropose an effective and robust framework to discover andanalyze the factors that are important in estimation of thedriving range. This framework helps with qualitativedemonstration of the relationships between the RangeEstimation results and the available data, as well asquantitative evaluation of the relativeness, importance andrequired precision of different data types to accomplish theestimation.
The rest of this paper is organized as follows: section IIintroduces the big data concept especially related to therange estimation technique; section III describes the rangeestimation data framework. In section IV, aMATLAB/SIMULINK-based example of the big data rangeestimation framework is presented; and section V concludesthe paper and explains the future work.
II. BIG DATA CONCEPT AND RANGE ESTIMATION
The amount of data collected in Electric Vehicles hasbeen growing fast because we have many more sensors,higher bandwidth communication systems, and cheapermemory to monitor and measure real-time driving rangerelated data and store the data on the vehicles, in connectedclouds, etc. This massive amount of data can have differentlevels of accuracy, resolutions, and relevance inunstructured ways. Big Data technologies have beenemerging to address huge, diverse and unstructured data tosubstantially improve the overall system performance. Withproper use of Big Data concepts and techniques, theremaining driving range estimation of the vehicle can besubstantially improved.
As described earlier, many available, yet unstructuredand growing data exist to provide much better estimates ofthe vehicle driving range. Different data has been collectedfrom the battery in-situ measurements, state of charge(SOC) estimation, battery manufacturers and models, EVmanufacturers and models, driving history, GPS locationtracking of the EV, traffic report, weather center, etc.However, some of these factors are more important thanothers when trying to provide an accurate estimate of range.This assorted data can be categorized into standard,historical, and real-time data. While the standard data isassociated with deterministic non-updating phenomena, the

2
historical data is related to the stochastic behavioral-dependent trends. The real-time data are deterministic orstochastic data that need to be updated in real-time.
Here we use a three-day trip planning to a nearby site forour vacation to illustrate the proposed framework concept.The planning needs a combination and synchronization ofdifferent types of data:
Standard data: E.g. the schedule of different tours andactivities such as parachuting, skydiving, etc. from thewebsites, the normal driving time to the destination fromGPS or Google Map, or the climatic conditions such ashurricane season.
Historical Data: E.g. Recent Mile per Gallon (MPG) ofthe car to schedule the refueling stops on the road, thereviews from the people who have planned a similar trip orvisited the area from review websites such astripadvisor.com, the reviews of the restaurants and hotels fordining and accommodation from websites such as yelp.com,etc.
Real-time Data: E.g. a traffic jam caused by an accident,a sudden rain, an urgent issue that needs to be resolvedbefore departure, etc.
Therefore, we always use a combination of standard,historical and real-time data to plan and adjust our plans.Based on the good reviews on a restaurant (historical data),we choose the close-to-lunch tours (standard data) near thatrestaurant. If a sudden rain or sickness happens (real-timedata) we compromise the activities with less priority, e.g.from skydiving to watching a movie (the priority of theactivities is based on the historical and standard data).
Similarly, the range estimation needs the incorporationand synchronization of all standard, real-time and historicaldata. For example, assume that we drive a Tesla Model S(with LiCoO2 battery pack) in California. We plan to makea trip from Sacramento to San Jose (around 120 miles) on awinter morning. Our Big Data-based range estimationsystem will give the driving range prediction based on thefollowing data:
Standard Data: E.g. the standard test data that providesthe specification (e.g. capacity degradation) of the LiCoO2battery from NASA; the regular route to San Jose fromGPS; the winter climatic condition of northern Californiafrom Wikipedia, the nominal All Electric Range (AER) ofModel S from Tesla, etc.
Historical Data: E.g. the average of the past energyconsumptions of the vehicle, the battery misuse history (e.g.operation under extreme temperatures, high humidity, highcharging/discharging rate, deep cycles, etc.) that could causea lasting effect on the performance of the battery logged inthe vehicle computer, the morning traffic pattern for theroute in the last months from the California Department ofTransportation, etc.
Real-time Data: E.g. a traffic jam on the highway due toaccidents, weather changes like sudden rain during the trip,rerouting due to the highway shutdown, etc.
The driving range estimation is based on these threeforms of data. Usually, the standard and historical data
provides an initial prediction of the driving range; and thereal-time data updates the estimation during the driving.However, under different conditions, some data are morerelevant than others for the range estimation. This data canbe historical, standard, or real-time depending on differentsituations. The big data analytics helps us identify therelevant data and discover its correlation to the remainingdriving range estimation.
III. RANGE ESTIMATION DATA FRAMEWORK
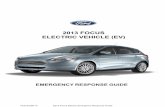
All the standard, historical and real-time data related tothe range estimation are available from different resources,including the electric vehicle, battery management system,traffic report, GPS center, etc. with different structures,accuracies, sampling rates, and communication standards.Therefore, we develop a range estimation data framework tocollect different data from various resources, analyze them,and include them as parameters and models in the rangeestimation algorithm. This framework has the ability to beimplemented in big data computing structures such asHadoop [7]. Figure 1 shows an example of the rangeestimation framework block diagram with five datacollecting nodes including route, weather, driving behavior,vehicle, and battery nodes. These nodes collect the rangeestimation related data from different resources. Then theelectric vehicle model along with the battery model isutilized to estimate the driving range based on the storeddata. The following subsections explain the components ofthis block diagram.
Routeand
Terrain
Weather
DrivingBehavior
VehicleModeling
BatteryModeling
Electric VehicleModel
Battery Simulator(SimBattery)
Data Collection Nodes
Google Map
Wunderground.com
Driver History
VehicleManufacturer
BatteryManufacturer
Distance, Terrain, location
Temperature, wind
VehicleParameters
Speed
PowerConsumption
Battery ModelParameters
DrivingRange
Figure 1 Range estimation framework block diagram.
A. Route informationRoute information including the driving distance, the
road terrain, speed limit, and the traffic data is one of themost important components to estimate the driving range.This information can be categorized as standard data in thecase of the distance, road terrain and speed limit, as well asreal-time data in the case of live traffic data, and historicaldata in case of typical traffic data. The route data (point-to-point longitude-latitude path) as well as the speed limit andtraffic data are easily available through the Google mapwebsite. Moreover, the Google website encouragesdeveloping free Application Programming Interfaces (APIs)

3
that use the Google map information and provide additionalinformation. For example, the elevation API provides theterrain of the road using the longitude and latitude of therouting points.
Note that what the Google map website shows to thedriver is the decision points on the route. In the other words,the website displays the points at which the driver needs tomake decisions such as turn right/left, merge, or switch theroad, rather than overwhelming the driver with so many in-between points that are not necessary. However, these in-between points are necessary for accurate route terraincalculation. The good news is that the latitude and longitudeinformation of detailed in-between data points on thedriving route is already available on the website althoughnot displayed. This data is available in a “polyline dataformat”; and we use “googlePolylineDecoder”, which is anopen source MATLAB code, to extract the latitude-longitude information of the route points.
B. Weather DataThe weather data mainly falls into the category of the
real-time data. Although the historical data helps to predictthe weather in the near future, the accurate prediction isperformed by analyzing the satellite images. Therefore, theweather prediction is a well-established expertise that wecan just use the results to make the range estimation moreaccurate. There are several webpages that present accurateweather reports and prediction results. According to themain idea of this big data framework, we write a code tolocate the information, extract the parameters that areimportant to the range estimation algorithm, and integratethem into the range estimation algorithm.
We use “Wunderground.com”, a website that providesthe information regarding temperature, wind speed and winddirection at the given longitudes and latitudes. While thetemperature is used to adjust the battery parameters basedon the temperature effect analysis, the wind speed anddirection gives the velocity of the wind in the oppositedirection of the vehicle to calculate the aerodynamic powerconsumption of the vehicle.
C. Driving Behavior DataThe driving behavior is the most challenging data to
obtain, because it is tied to the human behavior; and can berelated to all historical, standard, and real-time data.Although the historical data could be available for eachdriver by recording the speed and location in the vehicle’sGPS, the access to this type of data is not easy due to theprivacy and security issues. Moreover, different backgroundand daily events can significantly influence the drivingbehavior and make the real-time data deviated from thehistorical data.
Several approaches have been suggested so far to modelthe drivers’ behavior based on the experimental data. Thereare standard driving cycle tests available from the UnitedStates Environmental Protection Agency [8] that gives thedriving speeds at different trips. These data provide thestandard driving speeds at typical highways and urban areas
at different conditions. The actual driving behavior can bedifferent from these standard data. For example, somestudies have categorized different driving behaviors intoaggressive, normal and slow drivers depending on theindividual history of the driver. Each of those categories isassigned a weight to approximate the vehicles speed basedon the standard data or the road speed limit. The sameapproach has been used by categorizing the trips into short,medium and long distance trips and assigning standarddriving behaviors to each category. Also, some data-drivenapproaches [9, 10] have been proposed that consider thehistorical driving speed of different drivers on a route orhighway; and use Fuzzy Logic or Markov Chain techniquesto predict the speed of the vehicle on the road. Thesemethods have been used extensively in transportation area.However, incorporating these approaches is beyond thescope of this paper, and will be pursued in our future work.In this paper, we use the distance and predicted time data ofthe google map to approximate the average speed of thedriver among decision points.
D. Electrical Vehicle Modeling DataTo calculate the power consumption of an electric
vehicle at different speeds, accelerations, as well as road andweather conditions, we consider a widely-used model [11]to represent the power that needs to be provided by thevehicle's battery to propel the vehicle. Accordingly, weconsider a vehicle along a slope as demonstrated in Figure 2with all the forces applied to the vehicle as a free bodydiagram.
Figure 2 Free body diagram of an electric vehicle along a slope.
Table 1 Vehicle Power Consumption ParametersVehicle
ParameterDescription
v Velocity of the vehicle (m/s)a Acceleration of the vehicle (m/s2)
m Vehicle mass (kg)
vw Velocity of the wind in the opposite direction (m/s)
α Slope of the road (rad)
μ Friction coefficient
ρ Density of the fluid (air) (kg/m3)
A Cross section of the car (m2)
Cd Drag coefficient

4
ηg The gear system efficiency
r Radius of the wheel (m)
G Gear ratio
I moment of inertia of the rotor
ηm Vehicle’s motor efficiency
T Torque (Nm)
ω Angular speed (rad/s)
kC Copper losses coefficient
ki Iron losses coefficient
kw Windage loss coefficient
C Constant losses
In this figure, the traction force of the vehicle providedby the drivetrain is the interaction of different forces:= + + + . (1)
Defining all vehicle parameters inTable 1, where the friction and gravity forces are:= ( ) , (2)= sin( ) , (3)the aerodynamic force, a function of the relative speed ofthe vehicle v and the wind vw, is calculated as:= ( − ) , (4)and the acceleration force is a combination of the linear androtational acceleration:= + . (5)
Therefore, the traction power of the vehicle can becalculated as: = × (6)
Obtaining the motor angular speed from:= , (7)The applied torque to the motor can be calculated as:= . (8)The efficiency of the motor at this speed and torque is:= (9)The input power to the motor is:= (10)Another power consumption load inside the vehicle is theancillary power including air conditioner, batterymanagement system, light and audio systems:= + + + (11)Thus, the power that needs to be provided by the batterypower is: = + (12)
Figure 3 demonstrates the power transmission in electricvehicles from battery to the wheels with considering allpreviously mentioned power consumptions.
Figure 3 Power transition block diagram in the electric vehicle.
E. Battery Modeling DataDepending on the required accuracy and the application,
different types of models have been developed for thebattery. Among those models, the RC-equivalent circuit isan effective one to represent the battery’s dynamics forbattery energy management purposes. The followingsubsections describe some of the battery’s characteristicsthat are considered in the electric vehicle’s battery model.
1) Linear Model with Internal ResistanceA typical rechargeable battery can be modeled by a large
capacitor that stores and releases electrical energy duringcharging and discharging cycles. As in any electrochemicalprocess, these charging/discharging cycles encounter a smallresistance due to the electrolyte and the inter-phase resistance.This small resistance is modeled as an internal resistor, R0, inseries with the battery capacitor Q in Figure 4. Since thevalue of R0 changes with the battery State of Charge (SOC),the ambient temperature, and the aging effect of the battery,online parameters identification technique is used to estimatethe internal resistance of the battery from the battery terminalcurrent and voltage.
Figure 4 Battery model with relaxation effect, internal resistance,and VOC-SOC function.
2) Relaxation EffectThe relaxation effect is another basic characteristic of the
battery that appears during and after the charging anddischarging cycles. This effect represents the slowconvergence of the battery’s terminal voltage to itsequilibrium after hours of relaxation followingcharging/discharging and is modeled by series-connectedparallel RC circuits. The number of RC groups used is atrade-off between accuracy and complexity. While Chen, etal., [12] recommended two RC groups as the optimal model,there are several references [13] stating that one RC groupstructure can provide results that are accurate enough forapplications such as electric vehicles.
3) VOC-SOC RelationshipDespite the common assumptions about a simple linear

5
model for the battery, the static relationship between the opencircuit voltage (VOC) and the SOC of the battery isintrinsically nonlinear. This nonlinear relationship is thefunction of electrochemical characteristic of the battery cell;and is obtained from experimental tests on the battery cell.The VOC-SOC curve is usually provided by the battery cellmanufacturer, or obtained from experimental results.
4) Cycling and temperature EffectThe parameters of the battery are subject to change due
to different conditions of temperature and ageing (calendartime and cycling). The effect of temperature and cycling onthose parameters are available as standard data for differentchemistries and battery types. Those data along withstatistical analysis to apply uncertainty factors includingpartial charge/discharge and temperature fluctuations, helpspredicting the battery parameters variations during amedium to long trip. In this paper, we just consider thetemperature effect on the internal resistance of the battery tokeep the simplicity of the demonstration.
5) Battery SOC and SOHThe SOC and SOH of the vehicle’s battery at the time of
the prediction are crucial for the range estimation algorithm.The SOC provides the remaining charge of the batterycompared to the full capacity, and SOH provides the abilityof the battery to handle the chare/discharge cycles duringthe trip. For accurate estimation of the remaining charge atthe time of the range estimation, we have developed aparameters/SOC/SOH co-estimation algorithm [14-16] thataccurately estimates the SOC and full capacity of the batterybased on a model with updating parameters.
IV. PROTOTYPE AND RESULTS
To demonstrate the big-data-based range estimationconcept as a prototype, we have developed aMATLAB/SIMULINK code that is able to search for therange estimation-related data including route, weather,driving behavior, electric vehicle, and battery data fromdifferent resources. The interface of the code is a Graphical
Figure 5 Big-data based range estimation GUI front page
User Interface (GUI) in MATLAB that is in a prototypingstage. As described earlier, each part of the code can beconsidered as a data collection and analysis node that can beimplemented in a distributed computing structure.Moreover, in our implementation the processing andincorporating the data into the range estimation algorithm isperformed on the same PC as the data collecting processalthough it can be distributed among different processors toincrease the computing speed.
A GUI has been designed so that the user is able toverify the features of the data-driven based range estimationapproach. Figure 5 shows the front page of the designedGUI. In this page, the users enter the departure anddestination cities of the trip inside the “Origin” and“Destination” boxes. Pressing the “Get Route Data” button,a MATLAB function starts running. This function acts asthe “Route” and “weather” data collecting nodes in Figure 1.Figure 6 shows part of the code in this function that startswith the origin and destination points, and uses a Googlemap API called “Direction” to provide the latitude,longitude and the predicted arrival time at the turning pointsof the route from the origin to the destination. With thedistance and duration data, the normal driving speedbetween two points can be approximated assuming averagespeed between turning points. Although assuming theaverage speed between route points is a practical solution tothe intrinsically stochastic driving behavior, the road gradesin shorter travel distances can be obtained in more detailscompared to the route points. As explained in section III-A,the “googlePolylineDecoder()” which is an open sourceMATLAB function, is used to convert the polyline ASCIIcode of the Google map data into the latitude and longitudeof the in-between points.google_search=strcat('http://maps.googleapis.com/maps/api/directions/xml?origin=',origin,'&destination=',destination,'&sensor=false');DOMnode=xmlread(google_search);xmlwrite('temp.xml',DOMnode);s = xml2struct('temp.xml');n_speed=numel(s.DirectionsResponse.route.leg.step);distance_speed=zeros(1,n_speed);duration_speed=zeros(1,n_speed);for i=1:n_speed
duration_speed(i)=str2num(s.DirectionsResponse.route.leg.step{1,i}.duration.value.Text);distance_speed(i)=str2num(s.DirectionsResponse.route.leg.step{1,i}.distance.value.Text);
endspeed=distance_speed./duration_speed;currentRoute =s.DirectionsResponse.route.overview_polyline.points.Text;[route_lat,route_lon] =googlePolyLineDecoder(currentRoute,0);Figure 6. Code for extracting route, speed and polyline data.

6
Afterwards, as demonstrated in the Figure 7 code, the“Elevation” API is utilized to provide the altitude(elevation) of all available points. The road grade is a directfunction of the relative altitude of the consecutive pointsalong the route.
google_search=strcat('http://maps.googleapis.com/maps/api/elevation/xml?locations=',num2str(route_lat(i)),',',num2str(route_lon(i)),'&sensor=false');DOMnode=xmlread(google_search);xmlwrite('temp.xml',DOMnode);s = xml2struct('temp.xml');elev_route(i)=str2num(s.ElevationResponse.result.elevation.Text);
Figure 7. Code for extracting road grade data.
After obtaining the route and terrain information, thelatitude and longitude data is used along with the “wui” APIwhich collects the real-time weather data from the“Wunderground.com” website. The MATLAB code toextract the weather data is demonstrated in Figure 8. Thisdata contains the temperature, wind speed, and winddirection information. The temperature data is used in ourbattery simulator, called “SimBattery”, to adjust the internalresistance and the full capacity of the battery. As explainedin sections III-B and III-D, the wind speed and winddirection is used to calculate the wind velocity in theopposite direction of the vehicle; and adjust theaerodynamic power consumption. Other data collectingnodes, regarding different vehicles, driving behaviors andbattery chemistries can be added to the MATLAB function.Those nodes would be able to incorporate different standard,historical and real-time data, and increase the accuracy ofmodeling and range estimation. For demonstration purposes,we use data regarding Tesla Roadster model [17] andlithium polymer battery. Moreover, we consider averagespeed with constant acceleration and deceleration at waypoints to model the driving behavior.
google_search2=strcat('http://api.wunderground.com/auto/wui/geo/WXCurrentObXML/index.xml?query=',num2str(route_lat(i)),',',num2str(route_lon(i)));xmlwrite('temp1.xml',xmlread(google_search2));s1 = xml2struct('temp1.xml');T_route(i)=str2num(s1.current_observation.temp_f.Text);wdeg_route(i)=str2num(s1.current_observation.wind_degrees.Text);wmph_route(i)=str2num(s1.current_observation.wind_mph.Text);
Figure 8 Weather data collection code
Following the mentioned considerations about thedriving speed, battery, and vehicle, the vehicle power
consumption is calculated using equations 1-11 in sectionIII-D. This task starts with pressing the “Range Estimation”button on the GUI, or the “Range Estimation/Weather”button to include weather data. Afterwards as demonstratedin Figure 9, the battery power is obtained from equation 12.An average model for a DC/DC converter is developed tocalculate the input current of the battery from the power.Figure 10 shows the battery model called SimBatterydeveloped in SIMULINK to represent the dynamic RCequivalent model of the battery that was described in sectionIII-E. As explained earlier, this model is an RC equivalentcircuit with adjusting internal resistance based on thereported temperature. The relationship between the internalresistance and the temperature (in oC) has been obtainedfrom experimental results on the battery cell as follows:( ) = .006438 . (13)
Figure 9. Vehicle, battery, and range estimation dataanalysis block diagram.
Figure 10. Simbatterybattery model simulator with DC/DCconvertor.
The SimBattery is executed by pressing the“SimBattery” button on the GUI; and provides the batteryvoltage and SOC. In this case study, the initial SOC at thebeginning of the trip is the SOC value estimated in the lastusage of the battery (e.g., yesterday from work to home),which can be different from the actual SOC now due toalready changes due to change of operating conditions (e.g.,different temperature, relaxation). When the trip starts, thecurrent SOC is estimated in real-time by feeding in-situvoltage and current of the battery to theparameters/SOC/SOH co-estimation algorithm. Moreover,the algorithm provides the updates of the battery parametersbased on the real-time and historical data. Figure 11 showsthe predicted consumed power, as well as the batterycurrent, voltage and SOC for a short 12 miles trip fromCary, NC to Raleigh, NC. Figure 11(d) shows that for a 12-mile drive the SOC drops for 5%. It means that this driver isable to drive for 12×16=192 miles with 80% SOC at similar

7
conditions. Although in this figure the data has been plottedversus time, it is also available versus distance; and leads tothe range that the vehicle can go before the battery goes outof charge.
(a)
(b)
(c)
(d)Figure 11. The simulated (a)battery power (b)battery current (c)
battrey voltage (d) battery SOC for range estimation.
V. CONCLUSION AND FUTURE WORK
A big-data analytics-based framework was introduced toestimate the remaining driving range of electric vehicles.This framework collects different standard, historical, andreal-time data from different resources. It then analyzes andcompiles them as a part of the range estimation algorithm.An example of the framework was introduced; and the datacollecting and processing trend was explained. AMATLAB/SIMULINK version of an example frameworkwas implemented to demonstrate the feasibility of theapproach. Future works will include various in-depth
analyses, based on the standard, historical and real-time dataand development to enhance range estimation accuracy androbustness.
ACKNOWLEDGMENT
The authors would like to thank Advanced Diagnosis,Automation, and Control (ADAC) lab for all fruitful groupdiscussions and feedbacks. This project is financiallysupported by Samsung Advanced Institute of Technology(SAIT).
REFERENCES
[1] R. A. Daziano, "Conditional-logit Bayes estimators forconsumer valuation of electric vehicle driving range," Resourceand Energy Economics, vol. 35, pp. 429-450, 2013.
[2] M. Ceraolo and G. Pede, "Techniques for estimating the residualrange of an electric vehicle," Vehicular Technology, IEEETransactions on, vol. 50, pp. 109-115, 2001.
[3] Hai Yu, Finn Tseng, and R. McGee, "Driving patternidentification for EV range estimation," Electric VehicleConference (IEVC), 2012 IEEE International, pp. 1-7, 2012.
[4] H. He, C. Sun, and X. Zhang, "A Method for Identification ofDriving Patterns in Hybrid Electric Vehicles Based on a LVQNeural Network," Energies, vol. 5, pp. 3363-3380, 2012.
[5] J. G. Hayes, R. P. R. de Oliveira, S. Vaughan, and M. G. Egan,"Simplified electric vehicle power train models and rangeestimation," Vehicle Power and Propulsion Conference (VPPC),2011 IEEE, pp. 1-5, 2011.
[6] Yuhe Zhang, Wenjia Wang, Y. Kobayashi, and K. Shirai,"Remaining driving range estimation of electric vehicle,"Electric Vehicle Conference (IEVC), 2012 IEEE International,pp. 1-7, 2012.
[7] Apache Hadoop [Online]. Available: http://hadoop.apache.org/[8] Dynamometer Driving Schedule: United States Environmental
Protection Agency [Online]. Available:http://www.epa.gov/nvfel/testing/dynamometer.htm
[9] L. Bor Yann and M. Dubarry, "From driving cycle analysis tounderstanding battery performance in real-life electric hybridvehicle operation," Journal of Power Sources, vol. 174, pp. 76-88, 2007.
[10] Tae-Kyung Lee, B. Adornato, and Z. S. Filipi, "Synthesis ofReal-World Driving Cycles and Their Use for Estimating PHEVEnergy Consumption and Charging Opportunities: Case Studyfor Midwest/U.S," Vehicular Technology, IEEE Transactionson, vol. 60, pp. 4153-4163, 2011.
[11] J. Larminie and J. Lowry, Electric Vehicle TechnologyExplained 2nd ed.: John Wiley & Sons, 2012.
[12] M. Chen and G. A. Rincon-Mora, "Accurate electrical batterymodel capable of predicting runtime and I-V performance,"Energy Conversion, IEEE Transactions on, vol. 21, pp. 504-511, 2006.
[13] M. A. Roscher and D. U. Sauer, "Dynamic electric behavior andopen-circuit-voltage modeling of LiFePO4-based lithium ionsecondary batteries," Journal of Power Sources, vol. 196, pp.331-336, 2011.
[14] H. Rahimi-Eichi, F. Baronti, and M. Chow, "Online AdaptiveParameters Identification and State of Charge Co-Estimation forLithium-Polymer Battery Cells," Industrial Electronics, IEEETransactions on, 2013.
[15] H. Rahimi-Eichi and Mo-Yuen Chow, "Adaptive online batteryparameters/SOC/capacity co-estimation," TransportationElectrification Conference and Expo (ITEC), 2013 IEEE, pp. 1-6, 2013.
[16] H. Rahimi-Eichi, U. Ojha, F. Baronti, and M. Chow, "BatteryManagement System: An Overview of Its Application in theSmart Grid and Electric Vehicles," Industrial ElectronicsMagazine, IEEE, vol. 7, pp. 4-16, 2013.
[17] J. Straubel. Roadster Efficiency and Range [Online]. Available:http://www.teslamotors.com/blog/roadster-efficiency-and-range