Bifurcation Analysis and Chaos Control in Genesio System ... · following Genesio system with...
13
International Scholarly Research Network ISRN Mathematical Physics Volume 2012, Article ID 843962, 12 pages doi:10.5402/2012/843962 Research Article Bifurcation Analysis and Chaos Control in Genesio System with Delayed Feedback Junbiao Guan School of Science, Hangzhou Dianzi University, Hangzhou 310018, China Correspondence should be addressed to Junbiao Guan, [email protected] Received 13 September 2011; Accepted 30 October 2011 Academic Editor: P. Minces Copyright q 2012 Junbiao Guan. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. We investigate the local Hopf bifurcation in Genesio system with delayed feedback control. We choose the delay as the parameter, and the occurrence of local Hopf bifurcations are verified. By using the normal form theory and the center manifold theorem, we obtain the explicit formulae for determining the stability and direction of bifurcated periodic solutions. Numerical simulations indicate that delayed feedback control plays an effective role in control of chaos. 1. Introduction Since the pioneering work of Lorenz 1, much attention has been paid to the study of chaos. Many famous chaotic systems, such as Chen system, Chua circuit, R¨ ossler system, have been extensively studied over the past decades. It is well known that chaos in many cases produce bad effects and therefore, in recent years, controlling chaos is always a hot topic. There are many methods in controlling chaos, among which using time-delayed controlling forces serves as a good and simple one. In order to gain further insights on the control of chaos via time-delayed feedback, in this paper, we aim to investigate the dynamical behaviors of Genesio system with time- delayed controlling forces. Genesio system, which was proposed by Genesio and Tesi 2, is described by the following simple three-dimensional autonomous system with only one quadratic nonlinear term: ˙ x y, ˙ y z, ˙ z ax by cz x 2 , 1.1
Transcript of Bifurcation Analysis and Chaos Control in Genesio System ... · following Genesio system with...

International Scholarly Research NetworkISRN Mathematical PhysicsVolume 2012, Article ID 843962, 12 pagesdoi:10.5402/2012/843962
Research ArticleBifurcation Analysis and Chaos Control in GenesioSystem with Delayed Feedback
Junbiao Guan
School of Science, Hangzhou Dianzi University, Hangzhou 310018, China
Correspondence should be addressed to Junbiao Guan, [email protected]
Received 13 September 2011; Accepted 30 October 2011
Academic Editor: P. Minces
Copyright q 2012 Junbiao Guan. This is an open access article distributed under the CreativeCommons Attribution License, which permits unrestricted use, distribution, and reproduction inany medium, provided the original work is properly cited.
We investigate the local Hopf bifurcation in Genesio system with delayed feedback control. Wechoose the delay as the parameter, and the occurrence of local Hopf bifurcations are verified. Byusing the normal form theory and the center manifold theorem, we obtain the explicit formulaefor determining the stability and direction of bifurcated periodic solutions. Numerical simulationsindicate that delayed feedback control plays an effective role in control of chaos.
1. Introduction
Since the pioneering work of Lorenz [1], much attention has been paid to the study of chaos.Many famous chaotic systems, such as Chen system, Chua circuit, Rossler system, havebeen extensively studied over the past decades. It is well known that chaos in many casesproduce bad effects and therefore, in recent years, controlling chaos is always a hot topic.There are many methods in controlling chaos, among which using time-delayed controllingforces serves as a good and simple one.
In order to gain further insights on the control of chaos via time-delayed feedback,in this paper, we aim to investigate the dynamical behaviors of Genesio system with time-delayed controlling forces. Genesio system, which was proposed by Genesio and Tesi [2],is described by the following simple three-dimensional autonomous system with only onequadratic nonlinear term:
x = y,
y = z,
z = ax + by + cz + x2,
(1.1)

2 ISRN Mathematical Physics
−20
24
−5
0
5
−10
0
10
x(t)
y(t)
z(t)
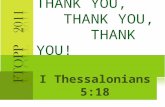
Figure 1: Genesio system’s chaotic attractor.
where a, b, c < 0 are parameters. System (1.1) exhibits chaotic behavior when a = −6,b = −2.92, c = −1.2, as illustrated in Figure 1. In recent years, many researchers have studiedthis system frommany different points of view; Park et al. [3–5] investigated synchronizationof the Genesio chaotic system via backstepping approach, LMI optimization approach, andadaptive controller design. Wu et al. [6] investigated synchronization between Chen systemand Genesio system. Chen and Han [7] investigated controlling and synchronization ofGenesio chaotic system via nonlinear feedback control. Inspired by the control of chaos viatime-delayed feedback force [8] and also following the idea of Pyragas [9], we consider thefollowing Genesio system with delayed feedback control:
x(t) = y(t),
y(t) = z(t) +M(y(t) − y(t − τ)),
z(t) = ax(t) + by(t) + cz(t) + x2(t),
(1.2)
where τ > 0 andM ∈ R.
2. Bifurcation Analysis of Genesio System with DelayedFeedback Force
It is easy to see that system (1.1) has two equilibria E0(0, 0, 0) and E1(−a, 0, 0), which arealso the equilibria of system (1.2). The associated characteristic equation of system (1.2) at E0
appears as
λ3 − (M + c)λ2 + (Mc − b)λ − a +(Mλ2 −Mcλ
)e−λτ = 0. (2.1)
As the analysis for E1 is similar, we here only analyze the characteristic equation at E0. First,we introduce the following result due to Ruan and Wei [10].

ISRN Mathematical Physics 3
Lemma 2.1. Consider the exponential polynomial
P(λ, e−λτ1 , . . . , e−λτm
)= λn + p(0)1 λn−1 + · · · + p(0)n−1λ + p(0)n
+[p(1)1 λn−1 + · · · + p(1)n−1λ + p(1)n
]e−λτ1 + · · ·
+[p(m)1 λn−1 + · · · + p(m)
n−1λ + p(m)n
]e−λτm ,
(2.2)
where τi ≥ 0 (i = 1, 2, . . . , m) and p(i)j (i = 0, 1, . . . , m; j = 1, 2, . . . , n) are constants. As
(τ1, τ2, . . . , τm) vary, the sum of the order of the zeros of P(λ, e−λτ1 , . . . , e−λτm) on the open right halfplane can change only if a zero appears on or crosses the imaginary axis.
Denote p = c2 + 2b, q = b2 − 2Mcb − 2Ma − 2ac, r = a2, Δ = p2 − 3q = c4 + 4bc2 +6(Mb + a)c + 6Ma+ b2, h(v) = v3 + pv2 + qv + r, v = ω2, v∗
1 = (−p +√Δ)/3, v∗
2 = (−p −√Δ)/3,
τ(j)k = (1/ωk){cos−1((Mω2
k+Mc2−bc−a)/M(ω2k+c
2))+2jπ}, τ0 = mink∈{1,2,3}{τ (0)k }. Followingthe detailed analysis in [8], we have the following results.
Lemma 2.2. (i) If Δ ≤ 0, then all roots with positive real parts of (2.1) when τ > 0 has the same sumto those of (2.1) when τ = 0.
(ii) If Δ > 0, v∗1 > 0, h(v∗
1) ≤ 0, then all roots with positive of (2.1) when τ ∈ [0, τ0] has thesame sum to those of (2.1) when τ = 0.
Lemma 2.3. Suppose that h′(vk)/= 0, then d(Reλ(τjk))/dτ /= 0, and sign{d(Reλ(τj
k))/dτ} =
sign{h′(vk)}.
Proof. Substituting λ(τ) into (2.1) and taking the derivative with respect to τ , we can easilycalculate that
⎡
⎢⎣d(Reλ(τj
k
))
dτ
⎤
⎥⎦
−1
=3v2
k + 2pvk + q
M2ω2k
(ω2k+ c2) =
h′(vk)M2ω2
k
(ω2k+ c2) , (2.3)
thus the results hold.
Theorem 2.4. (i) If Δ ≤ 0, then (2.1) has two roots with positive real parts for all τ > 0.(ii) IfΔ > 0, v∗
1 > 0, h(v∗1) ≤ 0, then (2.1) has two roots with positive real parts for 0 ≤ τ < τ0.
(iii) IfΔ > 0, v∗1 > 0, h(v∗
1) ≤ 0 and h′(vk)/= 0, then system (1.2) exhibits the Hopf bifurcation
at the equilibrium E0 for τ = τ (j)k.
3. Some Properties of the Hopf Bifurcation
In this section, we apply the normal formmethod and the centermanifold theorem developedby Hassard et al. in [11] to study some properties of bifurcated periodic solutions. Withoutloss of generality, let (x∗, y∗, z∗) be the equilibrium point of system (1.2). For the sake of

4 ISRN Mathematical Physics
convenience, we rescale the time variable t = τt and let τ = τk + μ, x1 = x − x∗, x2 = y − y∗,x3 = z − z∗, then system (1.2) can be replaced by the following system:
x(t) = Lμ(xt) + f(μ, xt), (3.1)
where x(t) = (x1(t), x2(t), x3(t))T ∈ R3, and for φ = (φ1, φ2, φ3)
T ∈ C, Lμ and f are,respectively, given as
Lμ(φ)=(τk + μ
)⎛
⎝0 1 00 M 1
a + 2x∗ b c
⎞
⎠
⎛
⎝φ1(0)φ2(0)φ3(0)
⎞
⎠ +(τk + μ
)⎛
⎝0 0 00 −M 00 0 0
⎞
⎠
⎛
⎝φ1(−1)φ2(−1)φ3(−1)
⎞
⎠, (3.2)
f(τ, φ)=(τk + μ
)⎛
⎝00
φ23(0)
⎞
⎠. (3.3)
By the Riesz representation theorem, there exists a function η(θ, μ) of bounded variation forθ ∈ [−1, 0], such that
Lμ(φ)=∫0
−1dη(θ, 0)φ(θ), φ ∈ C. (3.4)
In fact, the above equation holds if we choose
η(θ, μ)=(τk + μ
)⎛
⎝0 1 00 M 1
a + 2x∗ b c
⎞
⎠δ(θ) − (τk + μ)⎛
⎝0 0 00 −M 00 0 0
⎞
⎠δ(θ + 1), (3.5)
where δ is Durac function. For φ ∈ C1([−τ, 0], R), let
A(μ)φ =
⎧⎪⎪⎪⎨
⎪⎪⎪⎩
dφ(θ)dθ
, −1 ≤ θ < 0,
∫0
−τdη(θ, μ)φ(θ), θ = 0,
R(μ)φ =
{0, −1 ≤ θ < 0,F(μ, φ), θ = 0.
(3.6)
Then (1.2) can be rewritten in the following form:
x(t) = A(μ)xt + R
(μ)xt. (3.7)

ISRN Mathematical Physics 5
For ψ ∈ C[0, 1], we consider the adjoint operator A∗ of A defined by
A∗(μ)ψ(s) =
⎧⎪⎪⎨
⎪⎪⎩
−dψ(s)ds
, 0 < s ≤ 1,∫0
−τdηT (t, 0)ψ(−t), s = 0.
(3.8)
For φ ∈ C[−1, 0] and ψ ∈ C[0, 1], we define the bilinear inner product form as
⟨ψ, φ⟩= ψ(0)φ(0) −
∫0
θ=−τ
∫θ
s=0ψ(s − θ)dη(θ)φ(s)ds. (3.9)
Suppose that q(θ) = (1, α, β)Teiθωkτk(−1 ≤ θ ≤ 0) is the eigenvectors of A(0) withrespect to iωkτk, then A(0)q(θ) = iωkτkq(θ). By the definition of A and (3.2), (3.4), and (3.5)we have
τk
⎛
⎝iωk −1 00 iωk −M +Me−iωkτk −1
−a − 2x∗ −b iωk − c
⎞
⎠q(0) =
⎛
⎝000
⎞
⎠. (3.10)
Hence
q(s) =(1, α, β
)T =(1, iωk,
a + 2x∗ + ibωk
iωk − c)T
eiθωkτk . (3.11)
Similarly, let q∗(s) = B(1, α∗, β∗)eisωkτk(0 ≤ s ≤ 1) be the eigenvector of A∗ with respect to−iωkτk, by the definition of A∗ and (3.2), (3.4), and (3.5)we can obtain
q∗(s) = B(1, α∗, β∗
)eisωkτk =
1
1 + αα∗ + ββ∗ −Mαα∗τke−iωkτk
(1,
iωk(iωk + c)a + 2x∗
,−iωk
a + 2x∗
).
(3.12)
Furthermore, 〈q∗, q〉 = 1, 〈q∗, q〉 = 0.Let z(t) = 〈q∗, xt〉, where xt is the solution of (3.7) when μ = 0. We denote w(t, θ) =
ut(θ) − 2Re{z(t)q(θ)}, then
z(t) = iωkτkz(t) + q∗(0)f(μ0, w(z, z) + 2Re
{zq(0)
})= iωkτkz(t) + q∗(0)f0(z, z). (3.13)
We Rewrite (3.13) in the following form:
z(t) = iωkτkz(t) + g(z, z), (3.14)
where
g(z, z) = g20z2
2+ g11zz + g02
z2
2+ g21
z2z
2+ · · · . (3.15)

6 ISRN Mathematical Physics
Noticing that
w(z, z) = w20z2
2+w11zz +w02
z2
2+ · · · , (3.16)
we have
w =
⎧⎪⎨
⎪⎩
Aw − 2Re{q∗(0)f0q(θ)
}, −1 ≤ θ < 0,
Aw − 2Re{q∗(0)f0q(θ)
}+ f0, θ = 0.
(3.17)
Define
w = Aw +H(z, z, θ), (3.18)
with
H(z, z, θ) = H20z2
2+H11zz +H02
z2
2+ · · · . (3.19)
On the other hand,
w = wzz +wzz = Aw +H(z, z, θ). (3.20)
Expanding the above series and comparing the corresponding coefficients, we obtain
(A − 2iωkτk)w20(θ) = −H20(θ)Aw11(θ) = −H11(θ)
...
(3.21)
While
xt(θ) = w(z, z)(θ) + zq(θ) + zq(θ),
g(z, z) = g20z2
2+ g11zz + g02
z2
2+ g21
z2z
2+ · · · = q∗(0)f0.
(3.22)
Let xt(θ) = (x(1)t (θ), x(2)
t (θ), x(3)t (θ)), then we have
x(1)t (0) = z + z +w(1)
20 (0)z2
2+w(1)
11 (0)zz +w(1)02 (0)
z2
2+O(|(z, z)|3
),
x(2)t (0) = αz + αz +w(2)
20 (0)z2
2+w(2)
11 (0)zz +w(2)02 (0)
z2
2+O(|(z, z)|3
),
x(3)t (0) = βz + βz +w(3)
20 (0)z2
2+w(3)
11 (0)zz +w(3)02 (0)
z2
2+O(|(z, z)|3
).
(3.23)

ISRN Mathematical Physics 7
Therefore we have
g(z, z) = Bτk(1, α∗, β∗
)⎛
⎜⎝
00
(x(1)t (0)
)2
⎞
⎟⎠
= Bτkβ∗[
z + z +w(1)20 (0)
z2
2+w(1)
11 (0)zz +w(1)02 (0)
z2
2+O(|(z, z)|3
)]2.
(3.24)
Comparing the corresponding coefficients, we have
g20 = g11 = g02 = 2Bτkβ∗,
g21 = 2Bτkβ∗[w
(1)20 (0) + 2w(1)
11 (0)].
(3.25)
In what follows we will need to compute w11(θ) and w20(θ). Firstly we computew11(θ), w20(θ)when θ ∈ [−1, 0). It follows from (3.18) that
H(z, z, θ) = −2Re{q∗(0)f0q(θ)}= −gq(θ) − gq(θ). (3.26)
Substituting the above equation into (3.21) and comparing the corresponding coefficientsyields
H20(θ) = −g20q(θ) − g02q(θ), (3.27)
H11(θ) = −g11q(θ) − g11q(θ). (3.28)
By (3.21), (3.28), and the definition of A we have
w20(θ) = 2iωkτkw20(θ) + g20q(θ) + g02q(θ). (3.29)
Hence
w20(θ) =ig20ωkτk
q(0)eiωkτkθ +ig02
3ωkτkq(0)e−iωkτkθ + E1e
2iωkτkθ. (3.30)
Similarly we have
w11(θ) =−ig11ωkτk
q(0)eiωkτkθ +ig11
ωkτkq(0)e−iωkτkθ + E2. (3.31)
In what follows, we will seek appropriate E1 and E2 in (3.30) and (3.31). When θ = 0,
H(z, z, θ) = −2Re{q∗(0)f0q(θ)
}+ f0 = −gq(0) − gq(0) + f0 (3.32)
with
f0 = f0,z2z2
2+ f0, zzzz + f0, z2
z2
2+ · · · . (3.33)

8 ISRN Mathematical Physics
Comparing the coefficients in (3.18)we have
H20(0) = −g20q(0) − g02q(0) + f0,z2 ,
H11(0) = −g11q(0) − g11q(0) + f0,zz.(3.34)
By (3.21) and the definition of A we have
∫0
−1dη(θ)w20(θ) = 2iωkτkw20(θ) + g20q(0) + g02q(0) +
⎛
⎝002τk
⎞
⎠. (3.35)
∫0
−1dη(θ)w11(θ) = g11q(0) + g11q(0) +
⎛
⎝002τk
⎞
⎠. (3.36)
Substituting (3.30) into (3.36) and noticing that
iωkτkq(0) =
(∫0
−1eiωkτkθdη(θ)
)
q(0),
−iωkτkq(0) =
(∫0
−1e−iωkτkθdη(θ)
)
q(0),
(3.37)
we have
(
2iωkτkI −∫0
−1e2iωkτkθdη(θ)
)
E1 = f0,z2 , (3.38)
namely,
⎛
⎝2iωk −1 00 2iωk −M +Me−2ωkτk −1
−a − 2x∗ −b 2iωk − c
⎞
⎠E1 =
⎛
⎝002
⎞
⎠. (3.39)
Thus
E(1)1 =
2R, E
(2)1 =
4iωk
R, E
(3)1 =
4iωk
(2iωk −M +Me−2ωkτk
)
R, (3.40)
where
R =
∣∣∣∣∣∣
2iωk −1 00 2iωk −M +Me−2ωkτk −1
−a − 2x∗ −b 2iωk − c
∣∣∣∣∣∣. (3.41)

ISRN Mathematical Physics 9
Following the similar analysis, we also have
⎛
⎝0 −1 00 0 −1
−a − 2x∗ −b −c
⎞
⎠E2 =
⎛
⎝002
⎞
⎠, (3.42)
hence
E(1)2 =
2S, E
(2)2 = 0, E
(3)2 = 0, (3.43)
where
S =
∣∣∣∣∣∣
0 −1 00 0 −1
−a − 2x∗ −b −c
∣∣∣∣∣∣. (3.44)
Thus the following values can be computed:
c1(0) =i
2ωkτk
[
g20g11 − 2∣∣g11∣∣2 −∣∣g02∣∣2
3
]
+g212,
μ2 = − Re{c1(0)}Re{λ′(τk)} ,
χ2 = − Im{c1(0)} + μ2 Im{λ′(τk)}ωkτk
,
β2 = 2Re{c1(0)}.
(3.45)
It is well known in [11] that μ2 determines the directions of the Hopf bifurcation: ifμ2 > 0(< 0), then the Hopf bifurcation is supercritical(subcritical) and the bifurcated periodicsolution exists if τ > τk(τ < τk); χ2 determines the period of the bifurcated periodic solution:if χ2 > 0(< 0), then the period increase(decrease); β2 determines the stability of the Hopfbifurcation: if β2 < 0(> 0), then the bifurcated periodic solution is stable(unstable).
4. Numerical Simulations
In this section, we apply the analysis results in the previous sections to Genesio chaotic systemwith the aim to realize the control of chaos. We consider the following system:
x(t) = y(t),
y(t) = z(t) +M(y(t) − y(t − τ)),
z(t) = −6x(t) − 2.92y(t) − 1.2z(t) + x2(t).
(4.1)

10 ISRN Mathematical Physics
−20
24
−4−2
02
4
−10
0
10
x(t)
y(t)
z(t)
Figure 2: Phase diagram for system (4.3)with τ = 0.1 and initial value (0.1, 0.1, 0.2).
Obviously, system (4.1) has two equilibria E0(0, 0, 0) and E1(6, 0, 0). In what follows weanalyze the case of E0 only, the analysis for E1 is similar. The corresponding characteristicequation of system (4.1) at E0 appears as
λ3 − (M − 1.2)λ2 + (−1.2M + 2.92)λ + 6 +(Mλ2 + 1.2Mλ
)e−λτ = 0. (4.2)
Hence we have p = 4.4, q = −5.8736 + 4.992M, r = 36, Δ = 36.9808 − 14.976M, h(v) =v3+pv2+qv+r, v = ω2, v∗
1 = (−p+√Δ)/3 = (1/3)(4.4+
√36.9808 − 14.976M), v∗
2 = (1/3)(4.4−√36.9808 − 14.976M), τ (j)
k= (1/ωk){cos−1((Mω2
k+ Mc2 − bc − a)/(Mω2
k+ Mc2)) + 2jπ},
τ0 = mink∈{1,2,3}{τ (0)k }. By Theorem 2.4, whenΔ = 36.9808−14.976M ≤ 0, that is,M ≥ 2.46934,(4.2) has two roots with positive real parts for all τ > 0. In order to realize the control of chaos,we will consider M < 2.46934. We take M = −8 as a special case. In this case, system (4.1)takes the form of
x(t) = y(t),
y(t) = z(t) − 8y(t) + 8y(t − τ),z(t) = −6x(t) − 2.92y(t) − 1.2z(t) + x2(t).
(4.3)
Thus we can compute Δ = 156.789, v∗1.= 5.64051, h(v∗
1).= −182.922, v1 .= 4.30249, v2
.=0.873751, ω1
.= 2.07424, ω2.= 0.934746, h′(v1)
.= −28.1373, h′(v2) .= −51.2083, τ (0)1.= 0.632012,
τ(0)2
.= 1.85965,τ0.= 0.632012. Therefore, using the results in the previous sections, we have
the following conclusions: when the delay τ = 0.1 < 0.632012, the attractor still exists, seeFigure 2; when the delay τ = 0.632, Hopf bifurcation occurs, see Figure 3. Moreover, μ2 > 0,β2 < 0, the bifurcating periodic solutions are orbitally asymptotically stable; when the delayτ = 1.2 ∈ [0.632012, 1.85965], the steady state S0 is locally stable, see Figure 4; when the delayτ = 3.2 > 1.85965, the steady state S0 is unstable, see Figure 5. Numerical results indicatethat as the delay sets in an interval, the chaotic behaviors really disappear. Therefore theparameter τ works well in control of chaos.

ISRN Mathematical Physics 11
−0.10
0.1
−0.1
0
0.1
−0.5
0
0.5
x(t)y(t)
z(t)
Figure 3: Phase diagram for system (4.3)with τ = 0.632 and initial value (0.1, 0.1, 0.2).
−0.1
0
0.1
−0.10
0.1
−0.5
0
0.5
x(t)
y(t)
z(t)
Figure 4: Phase diagram for system (4.3)with τ = 1.2 and initial value (0.1, 0.1, 0.2).
−0.050
0.050.1
0.15
−0.1
0
0.1
−0.8−0.6−0.4−0.2
0
0.2
0.4
x(t)
y(t)
z(t)
Figure 5: Phase diagram for system (4.3)with τ = 3.2 and initial value (0.1, 0.1, 0.2).

12 ISRN Mathematical Physics
5. Concluding Remarks
In this paper we have introduced time-delayed feedback as a simple and powerful controllingforce to realize control of chaos of Genesio system. Regarding the delay as the parameter,we have investigated the dynamics of Genesio system with delayed feedback. To show theeffectiveness of the theoretical analysis, numerical simulations have been presented. Num-erical results indicate that the delay works well in control of chaos.
Acknowledgment
This work was supported by the Research Foundation of Hangzhou Dianzi University(KYS075609067).
References
[1] E. Lorenz, “Deterministic non-periodic flow,” Journal of the Atmospheric Sciences, vol. 20, pp. 130–141,1963.
[2] R. Genesio and A. Tesi, “Harmonic balance methods for the analysis of chaotic dynamics in nonlinearsystems,” Automatica, vol. 28, no. 3, pp. 531–548, 1992.
[3] J. H. Park, “Adaptive controller design for modified projective synchronization of Genesio-Tesichaotic system with uncertain parameters,” Chaos, Solitons and Fractals, vol. 34, no. 4, pp. 1154–1159,2007.
[4] J. H. Park, “Synchronization of Genesio chaotic system via backstepping approach,” Chaos, Solitonsand Fractals, vol. 27, no. 5, pp. 1369–1375, 2006.
[5] J. H. Park, O. M. Kwon, and S. M. Lee, “LMI optimization approach to stabilization of Genesio-Tesichaotic system via dynamic controller,” Applied Mathematics and Computation, vol. 196, no. 1, pp. 200–206, 2008.
[6] X. Wu, Z. H. Guan, Z. Wu, and T. Li, “Chaos synchronization between Chen system and Genesiosystem,” Physics Letters A, vol. 364, no. 6, pp. 484–487, 2007.
[7] M. Chen and Z. Han, “Controlling and synchronizing chaotic Genesio system via nonlinear feedbackcontrol,” Chaos, Solitons and Fractals, vol. 17, no. 4, pp. 709–716, 2003.
[8] Y. Song and J. Wei, “Bifurcation analysis for Chen’s system with delayed feedback and its applicationto control of chaos,” Chaos, Solitons and Fractals, vol. 22, no. 1, pp. 75–91, 2004.
[9] K. Pyragas, “Continuous control of chaos by self-controlling feedback,” Physics Letters A, vol. 170, no.6, pp. 421–428, 1992.
[10] S. Ruan and J. Wei, “On the zeros of a third degree exponential polynomial with applications toa delayed model for the control of testosterone secretion,” IMA Journal of Mathemathics Applied inMedicine and Biology, vol. 18, no. 1, pp. 41–52, 2001.
[11] B. D. Hassard, N. D. Kazarinoff, and Y. H. Wan, Theory and Applications of Hopf Bifurcation, vol. 41,Cambridge University Press, Cambridge, UK, 1981.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of



![South African Astronomical Observatory · 2019. 9. 17. · y]t w w d t\y y t uu d z yy yyv y v t&[y sv y u yv x w v [y ut w y s y s w yw uv s zd []w y]t w z&d sw y y t uu d st v yyv](https://static.fdocuments.in/doc/165x107/60b7194c54d6b33e0b48e0ce/south-african-astronomical-observatory-2019-9-17-yt-w-w-d-ty-y-t-uu-d-z-yy.jpg)




![LMI optimization approach to stabilization of Genesio–Tesi ...ynucc.yu.ac.kr/~jessie/temp/amc08_1.pdf · The Genesio–Tesi system, proposed by Genesio and Tesi [14], is one of](https://static.fdocuments.in/doc/165x107/61067f0ae6640310ce3a4188/lmi-optimization-approach-to-stabilization-of-genesioatesi-ynuccyuackrjessietempamc081pdf.jpg)