Analytical Model to Predict Cutting Forces in Indexable...
15
Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197 Special Issue: NCETERM-2017: Organized by GMIT, Karnataka. ©JoRSTEM, Malla Reddy Engineering College (Autonomous). 46 Analytical Model to Predict Cutting Forces in Indexable Drilling Darshankumar B V 1 , Sunil B 2 1,2 Department of Mechanical Engineering, Achary Institute of Technology, Bengaluru, 560107, Karnataka, India. Email: [email protected] 1 , [email protected] 2 Abstract—In modern manufacturing, most of the industrial parts are finished by machining operations because of its good dimensional accuracy, surface finish and feasibility to machine variety of materials, geometrical shapes and geometries. These machining operations include Drilling, Milling, Turning, Grinding & much more. In most of the cases, to finish any industrial part, more than 50% operations were conducted to produce holes. These holes are required for fastening, passages for fluids, assemble, etc. The common way to produce holes in any industrial part made of any metal is by drilling operations. The drilling operations could be done by using drilling tools, which could be of any type out of Solid Carbide Drills, Modular Drills or Indexable Drills. To be more competitive in the market, every manufacturer is always more concern about CPP (cost per part) and hence always looks for most cost effective solutions. The Indexable drill includes steel drill body and Indexable inserts which are mainly involved in cutting actions. After usage or damage, Indexable inserts could be indexed or replaced which could make Indexable Drills more cost-effective solutions for making holes. As described, Indexable drills could be most cost-effective solutions for making holes. However, there is a tendency to vibrate Indexable drill under specific conditions. These vibrations could cause bad tool life & may affect CPP. Therefore, it is very important to predict cutting forces while drilling for a better understanding of cutting process and ultimately for optimization of drill body & Indexable insert design. This kind of prediction of cutting forces also helps to predict chatter & vibrations generated while drilling, which will affect hole quality, tool life & cost efficiency. In this project work, the main focus will be on developing an analytical model to predict cutting forces. As cutting forces and many other cutting properties will vary for different materials, it might require identifying cutting force coefficient for a particular material by conducting the metal cutting test. This model will be built separately for central & periphery inserts, where forces predicted will be the sum of forces acting on each small element of each insert. The simulated results generated from force model will be compared and confirmed with actual cutting test data. Here I used T40-D2400-25-04 drill for actual cutting test and simulation comparison for particular material and cutting speed with variable feed rates. This model is further customized in such way that, which can be used for further product development for different insert design with any other number of small elements & geometrical features. To complete this task, it may need to write & run the program in MATLAB software, where the end user will input some geometrical features of the insert and then MATLAB program will predict cutting forces for a particular material. Keywords—MATLAB simulation, Indexable drills, CPP (cost per part), force prediction, machining. I. INTRODUCTION Machining is the basic word for most of the mechanical parts to obtain the final shape. Bulk deformation processes, such as rolling, casting and forging processes are mostly followed by a series of controlled metal removing operations to achieve parts with desired shape, dimension and surface quality. In this theme of controlled material removal process are today collectively known as Subtractive manufacturing. The machining processes can be classified into two categories: grinding process and cutting process. The cutting process is used to remove material from the blank, followed by grinding provides a surface finish and accuracy to the part [1]. Most common cutting operations are drilling, turning and milling followed by a precision operation such as shaping, boring, form cutting, reaming and honing. However, all metal cutting operations share the same principles of mechanics, but their geometry and kinematics may differ from each other [1]. Although a large variety of cutting processes have been developed over time and categorized them into two main types: conventional (traditional) and non-conventional cutting process. In conventional machining processes, the cutting edge of the tool start cut the base workpiece material through movements of the tool relative to the
Transcript of Analytical Model to Predict Cutting Forces in Indexable...

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 46
Analytical Model to Predict Cutting Forces in Indexable Drilling
Darshankumar B V1, Sunil B
2
1,2 Department of Mechanical Engineering, Achary Institute of Technology, Bengaluru, 560107, Karnataka, India.
Email: [email protected], [email protected]
Abstract—In modern manufacturing, most of the industrial parts are finished by machining operations because
of its good dimensional accuracy, surface finish and feasibility to machine variety of materials, geometrical
shapes and geometries. These machining operations include Drilling, Milling, Turning, Grinding & much more.
In most of the cases, to finish any industrial part, more than 50% operations were conducted to produce holes.
These holes are required for fastening, passages for fluids, assemble, etc. The common way to produce holes in
any industrial part made of any metal is by drilling operations. The drilling operations could be done by using
drilling tools, which could be of any type out of Solid Carbide Drills, Modular Drills or Indexable Drills. To be
more competitive in the market, every manufacturer is always more concern about CPP (cost per part) and hence
always looks for most cost effective solutions. The Indexable drill includes steel drill body and Indexable inserts
which are mainly involved in cutting actions. After usage or damage, Indexable inserts could be indexed or
replaced which could make Indexable Drills more cost-effective solutions for making holes.
As described, Indexable drills could be most cost-effective solutions for making holes. However, there is a
tendency to vibrate Indexable drill under specific conditions. These vibrations could cause bad tool life & may
affect CPP. Therefore, it is very important to predict cutting forces while drilling for a better understanding of
cutting process and ultimately for optimization of drill body & Indexable insert design. This kind of prediction of
cutting forces also helps to predict chatter & vibrations generated while drilling, which will affect hole quality,
tool life & cost efficiency.
In this project work, the main focus will be on developing an analytical model to predict cutting forces. As cutting
forces and many other cutting properties will vary for different materials, it might require identifying cutting
force coefficient for a particular material by conducting the metal cutting test. This model will be built separately
for central & periphery inserts, where forces predicted will be the sum of forces acting on each small element of
each insert. The simulated results generated from force model will be compared and confirmed with actual
cutting test data. Here I used T40-D2400-25-04 drill for actual cutting test and simulation comparison for
particular material and cutting speed with variable feed rates. This model is further customized in such way that,
which can be used for further product development for different insert design with any other number of small
elements & geometrical features. To complete this task, it may need to write & run the program in MATLAB
software, where the end user will input some geometrical features of the insert and then MATLAB program will
predict cutting forces for a particular material.
Keywords—MATLAB simulation, Indexable drills, CPP (cost per part), force prediction, machining.
I. INTRODUCTION
Machining is the basic word for most of the mechanical parts to obtain the final shape. Bulk deformation
processes, such as rolling, casting and forging processes are mostly followed by a series of controlled metal
removing operations to achieve parts with desired shape, dimension and surface quality. In this theme of controlled
material removal process are today collectively known as Subtractive manufacturing. The machining processes can
be classified into two categories: grinding process and cutting process. The cutting process is used to remove
material from the blank, followed by grinding provides a surface finish and accuracy to the part [1]. Most common
cutting operations are drilling, turning and milling followed by a precision operation such as shaping, boring, form
cutting, reaming and honing. However, all metal cutting operations share the same principles of mechanics, but their
geometry and kinematics may differ from each other [1].
Although a large variety of cutting processes have been developed over time and categorized them into two main
types: conventional (traditional) and non-conventional cutting process. In conventional machining processes, the
cutting edge of the tool start cut the base workpiece material through movements of the tool relative to the

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 47
workpiece, e.g. Drilling, milling, and turning etc. The term non-conventional cutting refers to other cutting processes
for e.g. electrical discharge machining (EDM), water jet cutting and electro mechanical machining (EMM), etc.
An indexable-insert drill accepts inserts that clamp into a tool body designed to accept them. A cutting edge of an
insert is used until it becomes worn out, then it is indexed, or turned, to expose a fresh cutting edge. When all cutting
edges of an insert are worn out, it is usually discarded and replaced with a new insert.
When manufacturing economy is one of the biggest concerns, indexable drills are the right solution. Whether it is
general drilling, plunge drilling or stack drilling, find the indexable drill that suits specific needs here.
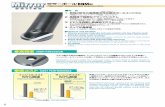
Fig. 1 Detailed view of Indexable inserted drill [8]
As shown in the figure 1 entire indexable drill come up with a steel body along with two or more, center and
periphery carbide inserts, based on the hole size and applications. The center carbide inserts work from cutting speed
0 to 50% of the maximum cutting speed (Vc max) and the periphery carbide insert work from cutting speed 50% of
Vc max to Vc max as shown in figure 2. The Center insert forms conical chips and the periphery insert forms a chip
similar to the internal turning chips from large depth of cut.
As the center inserts starts cutting at lower cutting speed, the insert should be of tougher grade to maintain the
insert life compared to the periphery insert which work under maximum cutting speed and harder grade.
Background Survey, mechanistic approach to predict cutting forces is combination of two factors, tool geometry
and cutting conditions. This method typically results in equation relating to cutting pressure or force per unit width
of cut or specific cutting force to the given cutting conditions, like feed and speed, and tool geometry. Consequently,
these methods will help us to reduce large number of machining test replaced by few experimental tests for good
prediction and to save time of manufacturing tools and inserts.
Fig. 2 Cutting Speed distribution in Indexable inserted drill [9]
Periphery
Insert
Centre
Insert
Steel
body

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 48
II. OBJECTIVES
At present, Indexable drills are designed and manufactured under some thumb rule for calculation of cutting
parameters and measurement of force obtained during drilling. Therefore, only after the manufacture of the
indexable drill bodies with inserts, and experimental (testing) setup we are going to set for cutting parameters,
corresponding drill force value will be obtained through the rotary force dynamometer. This process will take long
duration to launch the product in market with all customer expectations and needs. To overcome the long duration of
manufacturing and testing activities to find cutting forces during drilling, prediction of cutting force immediate after
the design stage will give more effectiveness in the new product development process. Use mechanistic model to
find out cutting force coefficients using particular tool geometry, and cutting force constants. By use of this
analytical model using MATLAB simulation predict cutting force for specified indexable inserted drill.
Experimental test data are obtained through Rotary dynamometer. Prediction of cutting forces in indexable drills for
different geometries. Determine and state the cutting forces and their significances using MATLAB.
Here, to predict forces few assumptions are as follows. Use of orthogonal cutting force concept to predict forces
acting on individual segments. Drill is rotating clockwise pointing cutting edge vertically downwards. Structural
vibrations and bending of the tool are not considered. Different cutting-force coefficients for central and peripheral
inserts. Linear relationship between cutting-forces and uncut chip thickness. Periphery insert parallel to positive x-
axis, and center insert on the other side. For the initial setup of drill body with the rotary dynamometer global
coordinate system. The orientation angle should be always positive. It is the angle made by tangential force acting
on center insert to global negative Y-axis.
III. METHODOLOGY
Methodology is the systematic approach to build or form the step by step procedure to improve the process,
productivity, quality and tool life of the product. Here we used to predict cutting forces in indexable drills using
MATLAB for different geometrical approach shown in figure 3. Here we can see both analytical and experimental
methodology used to predict cutting forces in indexable drilling.
Workpiece material : Stainless Steel (SS-304)
Machining Parameters : Cutting speed = 200 m/min
: Feed rate = 0.1, 0.11, 0.12, 0.13, 0.14, 0.15 mm/rev
Tool Geometry : T40-D2400-25-04
Drill body position : Rotating
Dynamometer : Rotary dynamometer spindle mounted (Kistler Type 9124B)
IV. ANALYTICAL FORCE MODEL
A good prediction of cutting force aids in the product development process and facilitates improved cutting
process, improved product design and increased productivity. The analytical method shows how to model cutting
forces for indexable drills by combining the experimental results with the simulation results. This model is
completely out from the structural vibration and bending of the tool body.
Apply linear relationship between cutting force and the uncut chip thickness to obtain a good estimation for thrust
force and torque. There will be different cutting force coefficients for both center and periphery insert.
The global coordinates (x, y, z) are rotates as the drill rotates, x is parallel to the cutting edge of the periphery
insert and y is perpendicular to x and z as shown in the figure 4. Z direction is along the drill axis and this figure
provides a detailed description of the method.
Figure 5 (a) and figure 5 (b) shown are the segmental edge profiles for center and periphery inserts respectively.
In this model assumed that cutting edges are perpendicular to the cutting speed direction. The basic principle used
here is divide the cutting edges into small segments both for center and peripheral insert as shown in the figure 5(a)
and 5(b). Identify the segments engaged in in workpiece and estimate the segmental cutting forces individually. The
frictional and normal cutting forces acting on the workpiece are assumed to be orthogonal in nature as shown in the
figure 6.

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 49
Fig. 3 Project Methodology
Fig. 4 Position of the drill body after installation, (x, y, z) on global rotating coordinates
Metal cutting
Test using
Rotary
Dynamometer Force constants
using linear
regression method
Matrix [B]
Machining
Parameters
Define work
piece material
Tool Geometry
Tool Geometry
matrix
Matrix [C]
Cutting Force
Coefficients
Matrix [A]
Predicted cutting
force
Fx, Fy, Fz & Mz
Finalize model
for future
prediction
Follow the Process
once at the beginning
Simulation v/s
measurement
comparison
MATLAB
SIMULATION
End of process
New Tool
Geometry

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 50
Fig. 5(a): Segmental edge profile for center insert
Fig. 5(b): Segmental edge profile for periphery insert
Fig. 6 Segmental friction force ( ) and normal force ( ) are transformed into tangential force ( ) and feed force ( ) directions.
is uncut chip thickness and is rake angle for segment i.[3]
The force components and are obtained by the equation below
(1)
(2)
Where , - are friction and normal cutting force co efficient, N/mm2
, - are friction and normal edge force co efficient, N/mm

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 51
- Length of cutting edge of segment ‗i‘, mm
- Uncut chip thickness of segment ‗i‘, mm
(3)
Where = Axial feed of the drill (feed/revolution).
= Angle between cutting edge and drill axis from figure 7 (Lead angle)
A right-hand coordinates system (x, y, z) is defined with z along drill axis shown in figure 4. The total directional
cutting forces are then obtained by transformation into global coordinates (x, y, z) shown in figure 7 and Summation
of the forces acting on each individual segment. Forces and are in the same plane and perpendicular to .
Fig. 7 Segmental cutting-forces shown in global coordinates ( , , ). is the length of the segmental
cutting edge and are segmental cutting-force in tangential and feed directions, respectively. [3]
Equation (1) and (2) can be rewritten in matrix form as
(4)
From figure 6 forces and are found as
(5)
Rake angle of segment ‗i‘
By combining and simplify equation (4) and (5)
Will get,
(6)
θi

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 52
Where , , are feed and tangential cutting force co efficient, N/mm2
, , are feed and tangential edge force co efficient, N/mm
Where,
(7)
Fig. 8 Segmental cutting-forces shown in global coordinates ( , ). is the angle between and negative Y - Axis. , and
are in the same plane. [3]
From Figure 7 and Figure 8, forces in x, y and z direction acting on each individual segment are calculated as:
(8)
(9)
(10)
is the angle between and negative Y-axis as shown in figure 8 (Orientation angle).
Torque is function of Tangential force and the average distance between segment and drill axis ( related as
(11)
Total torque,
(12)
Substitute eq. (3) and eq. (6) in eq. (8), we get,
(13)
Where force constants in Z-directions are
(14)

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 53
(15)
and are cutting force coefficients, ‗C‘ is the tool geometry for central and periphery inserts are given in eq.
(28).
Similarly substitute eq. (3) & eq. (6) in eq. (9), we get,
(16)
Where force constants in X-directions are
(17)
(18)
and are cutting force coefficients, ‗C‘ is the tool geometry for central and periphery inserts are
given in eq. (28).
Similarly substitute eq. (3) & eq. (6) in eq. (10), we get,
(19)
Where force constants in Y-directions are
(20)
(21)
and are cutting force coefficients, ‗C‘ is the tool geometry for central and periphery inserts are
given in eq. (28).
Similarly substitute eq. (3) & eq. (6) in eq. (11), we get,
(22)
Where moment constants in Z-directions are
(23)
(24)
are cutting force coefficients, ‗C‘ is the tool geometry for central and periphery inserts are given in eq.
(28).
Comparing above series of eq. (14), (15), (17), (18), (20), (21), (23) & (24), can be rewritten as,
8x1 8x1 (25)
Above equation is a system of linear equations that makes a relationship between cutting force coefficients ( ),
Cutting forces ( ) and tool geometry ( ).
Where, T (26)

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 54
T (27)
Elements of are extracted from the force constant matrix mentioned in equation 26 are shown in equation
28. The subscripts in geometry matric [ ] refers to ‗m‘ number of rows and ‗n‘ number of columns respectively.
The superscripts in the above equation ‗C‘ refers to center insert, and ‗P‘ refers to periphery insert respectively. ‗i
P refers to segment ‗i‘ belongs to Periphery insert and ‗i C refers to segment ‗i‘ belongs to center insert.
Equation 28 refers to non-zero element of matrix [C]. It should be noted that the thrust force has magnitude equal
to and direction in negative z-axis.
V. EXPERIMENTAL TEST RESULT
Initially to start predict cutting force on any particular cutting process like drilling, milling, turning, reaming, or
threading some kind of validation required once we come up with the predicted results. So here we need to specify
some parameters like workpiece material, tool geometry, cutting speed and feed rates for drilling. Should have some
28

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 55
standard force results for this drilling process using rotary force dynamometer. Plot the force results ( )
verses different feed rates and find regression constants using MATLAB.
A set of experiments were to be conducted to measure the cutting force in global coordinate system (x, y, z) and
torque around z-axis using rotating force dynamometer to measure the cutting forces. During this test, specify the
cutting parameters such as cutting speed, feed and specify the workpiece material. Conduct the test for different feed
rates for some fixed intervals as a variable cutting parameter as shown in table 1. For each feed rates take average
cutting force after full engagement of the drill body. And were to be calculate from the measured force in x, y, z
direction, additionally calculate the torque in z-axis from the measured torque.
TABLE I: CUTTING PARAMETER AND MATERIAL SPECIFICATION FOR THE TEST USED [2]
Description Data
Cutting speed 200 m/min
Feed rates 0.1, 0.11, 0.12, 0.13, 0.14 mm/rev
Material SS-304
Here we considered the standard results from the [2] for our calculation to find the regression constants for
data analysis using MATLAB. The data collection from the [2] are shown as below in table 2. TABLE II: EXPERIMENTAL TEST DATA
Feed rate
(mm/rev)
Fx
(N)
Fy
(N)
Fz
(N)
M
(N-mm)
0.1 -191 -268 -2950 20400 0.11 -179 -259 -2980 21800
0.12 -180 -252 -3020 23200 0.13 -175 -238 -3050 24600 0.14 -175 -236 -3110 25800
Then plot graph for forces and torque verses feed rate individually using MATLAB and find the regression
constant matrix [B] eq. 26. The force and torque in Y-axis and Feed rates in X-axis shown in Figure 9 to 12.
Force constant Matrix can be expressed as
T
[B] = [136000 6840 -3900 -2554 360 -223.2 850 -352.6] T
Fig. 9 Torque along Z-axis (Mz) versus feed.
aM= 136000
bM= 6840

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 56
Fig. 10 Force in Z-direction (Fz) versus feed.
Fig. 11 Force in X-direction (Fx) versus feed.
Fig. 12 Force in Y-direction (Fy) versus feed.
VI. DATA ANALYSIS
To predict cutting forces in drilling, tool geometry plays major contribution. So, as we know that indexable drill
is different from solid carbide shown in figure 1, steel body with min two carbide insert, one for center and one for
periphery based on drill diameter. These are placed in steel body such that drill should be stable enough to maintain
hole quality, tool vibration and chip evacuation. These inserts are with different lead angle and cutting-edge profile.
In this report to predict cutting force we divide the insert cutting edge into number of segment for both central and
periphery insert shown in figure 5(a) and (b).
Using geometry matrix [C] and the force constant matrix [B] from standard experimental test result, substitute in
eq. 25 we obtain the cutting force coefficients [A] eq. 27 below using MATLAB.
az = -3900
bz = -2554
ax = 360
bx = -223.2
ay = 850
by = -352.6

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 57
T
[A] = [-4275 4158.5 -1116 167.8 -1648.9 2354.3 378.1 62.7] T
Obtained tangential and feed cutting force and edge force coefficients from [A] are used to predict cutting forces
in indexable drills. Hence forces are calculated for each segment separately and the forces are calculated for drill
profile with partial engagement for each feed per revolution during the entry of the hole.
Using cutting force coefficient matrix [A], segmental length of cutting edge (Li) and uncut chip thickness
(hi), found segmental feed and tangential forces from eq. 6 using MATLAB program.
Calculate segmental cutting forces Fx, Fy, Fz in x, y, z direction and Torque around Z-axis Mz using
equation 8 to 11 and plot each forces individually with respect to time.
Calculate,
Spindle speed
Feed rate
Cutting time per revolution sec
Where,
Cutting speed Vc in m/min
Cutter diameter Dc in mm
Feed fn in mm/rev
By make use of MATLAB program using all inputs involved in the force prediction. Plot the graph force versus
Feed and Torque versus feed shown in the following discussion below using table. 3.
TABLE III: SIMULATION OUTPUT DATA FOR 0.1 MM/REV FEED
Time (s) 0.0678 0.0904 0.1130 0.1356 0.1582 0.1808 0.2034 0.2260 0.2486 0.2712 0.2938
Fx [N] 0.0 -76.6 -93.2 -100.3 -155.8 -173.0 -183.4 -193.8 -191.5 -187.2 -187.2
Fy [N] 0.0 1109.2 1178.2 -277.9 -642.4 -457.6 -371.2 -284.7 -255.7 -267.6 -267.6
Fz [N] 0.0 -442.4 -669.3 -1610.1 -2596.5 -2717.4 -2799.5 -2881.6 -2940.0 -2944.0 -2944.0
Mz [Nm] 0.0 -5.2 -5.0 7.0 17.9 18.3 18.9 19.6 20.3 20.4 20.4
Drill Dia 24 mm, Cutting speed 200 m/min,
Feed 0.1 mm/rev Material SS2244
Table 3 gives the simulation data for each revolution of the drill tool until full engagement of the drill body. This
simulation data gives stable cutting force and torque values once after the full engagement of the insert cutting edge
profile. This stable output value we can compare and confirmed with the experimental cutting test data for particular
feed rate from table 2, nearly match with the simulation result.
Fig. 13 Force Fx [N] simulation versus time for feed 0.1 mm/rev

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 58
Figure 13, force Fx versus time at the entry of the hole with feed rate 0.1 mm/rev and cutting speed 200 m/min.
Once drill will come in contact with the workpiece the highest point from the drill cutting geometry will start take
cut, and produces radial force. Profile engagement with each rotation of the drill produces segmental force. These
forces are summation of the segmental forces, varying proportionally as the cutting-edge engagement increases until
the full engagement of the drill cutting profile. After full engagement, the force becomes stable and which is nearly
match with the experimental test at 0.1 feed rate mentioned in table 2.
Fig. 14 Force Fy [N] simulation versus time for feed 0.1 mm/rev
Figure 14, tangential force Fy versus time at the entry of the hole, feed rate 0.1 mm/rev and cutting speed 200
m/min. Once drill will come in contact with the workpiece the peak point from the drill cutting geometry will start
take cut. Segmental profile engagement with each rotation of the drill produces tangential force. These tangential
forces are very high at initial level due to a part of the only center insert engagement. After one or two rotations, the
engagement becomes neutralize at some interval of time because of summation of the forces acting on both the
center and periphery inserts acting in different directions. Then proportionally becomes stable after full engagement
and nearly match with the experimental test at 0.1 feed rate as mentioned in table 2.
Fig. 15 Force Fz [N] simulation versus time for feed 0.1 mm/rev
Figure 15, feed force Fz versus time at the entry of the hole with feed rate 0.1 mm/rev and cutting speed 200
m/min. The highest point from the drill cutting geometry will start take cut, and produces feed force in Z-axis.
Profile engagement with each rotation of the drill produces segmental feed force. These forces are summation of the
segmental feed forces, varying proportionally until the full engagement of the drill. Once after full engagement of

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 59
the cutting edge profile, the force becomes stable and which is nearly match with the experimental test at 0.1 feed
rate from table 2.
Fig. 16 Torque Mz [N-m] along Z-Axis versus time for feed 0.1 mm/rev
Figure 16, Torque simulation during the entry of the hole along z - axis for cutting speed of 200 m/min and feed
rate of 0.1 mm/rev. The simulation torque result at the entry of the hole is -ve due to the centering deflection until
one or two rotational engagement. After that torque along Z axis will proportionally increases with each revolution
(at each time step) of the drill until the full cutting edge engagement. The final cutting torque values from the
simulation will closely match with the experimental result obtained through rotary force dynamometer shown in
Table 2.
VII. OBSERVATIONS
Cutting force coefficient obtained from standard drill test and tool geometry matrix, those are only dependent
on particular cutting speed and workpiece material.
These coefficients are independent of drill geometry, number of segments, feed rate, drill diameter.
Cutting parameters like axial feed, cutting speed and tool geometry will help us to find the segmental tool
engagement in each time step.
Divide the cutting edge into number of segments based on different lead angle, cutting edge length and overlap
of insert with reference to drill axis.
We will get the force and torque for each segment at particular feed rate.
Total force and torque value are determined by summing all obtained segmental forces and torque.
This method is not only the virtual method to predict cutting forces. Before that we are conducting an analytical
and experimental test on the model to conclude the MATLAB simulation.
By this analytical model we can save time and cost with other analysis (FEM) technique and prototype build of
the same model for experimental analysis.
Indexable inserts are coming with different geometries for both center and periphery inserts, like length of the
cutting edge, approach angle, orientation angle of center insert with respect to periphery insert.
We must necessarily to make the analytical calculation for Cutting force measurement for every small change in
the insert geometry and drill body. Without using this MATLAB simulation model, will be a kind of complex
and time dependent.
Use of spindle mounted rotary force dynamometer for extracting the cutting force and torque value
measurement directly from global drill body coordinates.
Mechanistic approach for calculation, which is fastest compared to orthogonal approach.
VIII. CONCLUSION
Mechanistic approach using method is very systematic approach to prediction of cutting forces. A detailed
analytical model is proposed here to predict cutting forces in two fluted indexable insert drills.

Journal of Research in Science, Technology, Engineering and Management (JoRSTEM) ISSN: 2456-0197
Special Issue: NCETERM-2017: Organized by GMIT, Karnataka.
©JoRSTEM, Malla Reddy Engineering College (Autonomous). 60
Obtain the cutting force coefficient from the standard experimental test result for a particular cutting tool and
machining parameters. This method identifies individual cutting force coefficient for both peripheral and center
inserts separately. These coefficients will help us to simulate or predict cutting forces in indexable insert drills.
To identify cutting force coefficient, have to conduct cutting force measurement test using rotary force
dynamometer by making few holes once at the initial stage.
This simulation model is compared with standard initial cutting test of forces in x, y, z direction and Torque Mz
along z direction are closely match for particular feed rate, cutting speed, specific material and tool geometry.
Mechanistic approach is usually less costly and faster method than the orthogonal cutting test to obtain the force
coefficients.
This segmental analysis will help us to predict and understand the cutting force variation in detail during the
entry of the hole, when inserts are about to engaged.
There is no need of making number of prototype inserts or drill body for the new design force measurement
trials.
Further modification in the existing drill design can be analyzed easily on force prediction.
Recommendation and future scope: This analytical model will be help in prediction of cutting forces in new
design release, before proceeding for manufacturing prototypes. This could have been recommended for other
machining like milling, turning and finishing operation tools, because this method is simple, fast and less costly
compared to FEM simulation and orthogonal approach. And also could have been save proto type manufacturing
lead time after the final design release by using this prediction model.
ACKNOWLEDGEMENT
Here the author would like to acknowledge the institution and the company for their support on experimental tests
and contribution on successful completion of the work. Author would like to thank parents and friends for their
unfailing moral support and encouragement.
REFERENCES
[ 1 ] Y. Altintas, Manufacturing automation: metal cutting mechanics, machine tool vibrations, and CNC design.
Cambridge University press, 2012. [ 2 ] R. F. Hamade, C. Y. Seif, F. Ismail, ―Extracting cutting force coefficient from drilling experiments‖,
International Journal of Machine Tools and Manufacture, vol. 46, pp. 387–396, 2006.
[ 3 ] A. Parsian, M. Magnevall, T. Beno, and M. Eynian, ―A mechanistic approach to model cutting forces in
drilling with indexable inserts,‖ Procedia CIRP, vol. 24, no. 0, pp. 74 – 79, 2014, new Production
Technologies in Aerospace Industry - 5th Machining Innovations Conference (MIC 2014).
[ 4 ] M. Kaymakci, Z. Kilic, and Y. Altintas, ―Unified cutting force model for turning, boring, drilling and
milling operations,‖ International Journal of Machine Tools and Manufacture, vol. 54, pp. 34–45, 2012.
[ 5 ] I. Badan, Gh. Oancea, M. Vasiloni, ―Mathematical model for drilling cutting forces of 40CrMnMoS8-6
steel‖, Engineering science Vol.5 No.1-2012, Transylvanian University of Brasov
[ 6 ] E. Kuljanic, M. Sortino, F. Miani, ―Application of a rotary dynamometer for cutting force measurement in
milling‖, Department of mechanical Engineering, university of Udine, Italy. June 2002, DOI:10.1007/978-
3-7091-2555-7_15.
[ 7 ] Lanlan Liu, LiPing Zhou, Zhengjiam Ying, ―The FEM dynamic simulation in the drilling process with
indexable insets‖, Advanced materials research, ISSN:1662-8985, Vols.557-559, pp 1292-1297.
[ 8 ] http:// www.alliedmachine.com / Products / Drilling / Indexable-Insert-Drills/ subnav / 4 T E X%
E2%84%A2-Drill.aspx
[ 9 ] http:// www.sandvik.coromant.com/en-gb / knowledge / drilling / grade_information / corodrill_880 /
pages/default.aspx