An Economical Class of Digital Filters for Decimation and Interpolation-FoL

of 8
Transcript of An Economical Class of Digital Filters for Decimation and Interpolation-FoL
-
7/30/2019 An Economical Class of Digital Filters for Decimation and Interpolation-FoL
1/8
IEEE TRANSACTIONS O N ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. ASSP-29, NO . APRIL 1981
Abstruct-A class of digital he a r phase fi iit e impulse response (FIR)filters for decimation (sampling rate decrease) and interpolation (sam-pling rate increase) are presented. They require no multipliers and uselimited storage making them an economical alternative to convent ionalimplementations for certain applications.A digital fiiter in this class consists of cascaded ideal integrator stagesoperating at a high sampling rate and an equal number of c omb stagesoperating at a low sampling rate . Together, a single ntegrator-com bpair producesauniform FIR. Thenumber of cascaded ntegrator-comb pairs is chosen to meet design requirements for aliasing or imagingerror.Design procedures and examples are given for both de cimation andinterpolation filters with the emphasison frequency response and regis-ter width.
I . N T R O D U C T I O NI recent iterature,CrochiereandRabiner [ l ] -[3] havepresenteda general theory for FIR multistage decimatorsand interpolators with emphasis on optimalesigns in terms ofminimizing he numb er of multiplications per second or herequiredamo unt of storage.Goodmanan dCarey [4] havetaken the approac h that a careful choice of filter coefficientsfor half-band decimators and interpolators can leado efficienthardware designs.
In the field of efficient digital filters, Peled and Liu [SI haveintroduced the coefficient slicing approach to filter design.For these filte,rs, multipliers are replaced with adders and ROMlook-up tables.Thisapproach can be appliedprofitably todecimator and interpolator designs.The essential func tion of a d ecimation or interpo lation ilteris to decr ease or increase the sampling rateand to keep hepassband aliasing or imaging error within prescribed bounds .In this paper, a class of linear phase FIR filters for decimationand interpolation that fulfill this basic re quirement are intro-duced. The filters require no multipliers and use limited stor-age thereby leading to more economical hardware implemen-tations. They are designated cascaded integrator-comb (CIC)filters because their structure consists of an integrator sectionoperating at the high sampling rate and a comb section oper-ating at the low sampling rate.Using CIC filters, the amo unt of passb and liasing or imagingerror can be brought within prescribed bounds by increasingthe number of stages in the filter. Howeve r, the width of thepassband and he requenc ycharacteristicsoutside he pass-band are severely limited. orriticalpplicationshese
Manuscript received March 17 ,19 80 ; revised September 22, 19 80 .The author is with ESL, Inc. Sunnyvale, CA 94086.
limitations can be overcome by using CIC filters to make thetransitionbetween high and owsamplingrates,and to useconventional iltersat he owsampling ate to shapeorclean-up the frequ ency response. In this manner, CIC filtersare used at high sampling rates where economy is critical, andconven tional filters are used at low sampling rates where thenumber of multipliesper seco nd is low.Like CIC filters, some of the filters described in [4] do notrequiremultipliers;however, hese ilters are restricted to arate change factor of two, and have limited attenuation in thealiasing/imaging bands.The next s ection descr ibes CIC filters in terms of their func-tional uilding locks,elatingheir-transforms tohez-transform of the comp osite filter., Section I11 discusses thefrequency response of CIC filters giving an approximation thatis usable for a wide range of design problems. Tables are pro-vided for determining filter param eters as a func tion of hedesired band width and aliasing/imaging error.InSection V, CIC decima tion ilters are describedwithparticular attention given to the effectsof truncationandrounding on he filters error statistics. Design equa tions aregiven and are applied to a specific design problem. In SectionV a similar treatme nt is given for CIC interpolatio n filters withthe major considera tion given to register growth and its rela-tion to the filter design.
11. CIC FILTE R DES CRIPT IONFig. 1 shows the basic structure of the CIC decimation filter.analogou s structure for the CIC interpolatio n filter is pre-sented in Fig. 2.The integrator sectionof CIC filters consists of Ni de al digitalintegrator stages ope rating at the high sampling rate,f,. Eachstage is implemented as a one-pole filter with a unity feedbackcoefficient. The system func tion for a single integr ator is
Thecombsectionoperates at he ow sampling rate f JRwhere R is the integer rate change factor. This section consistsof N comb stages with a differential delay of M samples perstage. The differential delay is a filter design parameter usedtocon trol he filters frequenc y esponse. npractice, hedifferentialdelay is usually held to M = 1 or 2. The systemfunction for a single comb stage reference d to the high sam-pling rate isH&) 1 Z-RM.
0096-3518/81/0400-01S5$00.7S 1981 IEEE
AlultIXDoM1a1UfIX Ra
-
7/30/2019 An Economical Class of Digital Filters for Decimation and Interpolation-FoL
2/8
156 IEEE TRANSACTIONS ON ACOUSTICS,PEECH, AND SIGNAL PROCESSING, VOL. ASSP-29, NO , 2, A P R I L 198
Fig. 1. CIC decimation filter.x.Fig. 2. CI C interpolation filter.
There is a rate change switch between the two filter sections.For decimation, the switch sub samples the outpu t of the lastintegrator stage, reducing he sampling rate from f, t o f , / R ;and for nterpolation , he switch causes a rate increase by afactor of R by inserting R 1 zero valuedsamples betweenconsecutive samples of the com b section out pu t.It follows from (1) an d ( 2 ) that the system function for thecompo site CIC filter referenced t o the high sam pling rat e,& , isH ( z ) H Y ( Z ) H F ( Z ) (1 z - RM) N R M - 1z ) k=(1 - 1 N .-.IN. (3 )
It is implicit from the last form of the system fun ctio n thatthe CIC filter is functionally equivalent to a cascade of N u n i-form FIRfilter stages. A conventional implementation consistsof a cascade of N stages each requiring Rh torage registersan don eaccumulator.Takingadvantage of the atechangefactor, one of the N stages can be simplified to use only Mstorage registers.It must be stressed that each integrator has a unity feedbackcoefficient; for CIC decim ators this resu lts in register overflowin all integrator stages. This is of no consequence if the fol-lowing two conditions are met. 1) The filter is implementedwith twos complementarithmeticorothernumbersystemwhich allows wrap-aroundbetween themo st positive andmost negative numbers. 2 ) The rangeof the num ber systemis equal to or exceeds he maximum magnitude expected atthe ou tpu t of the composite filter. For CIC interpolators, thedata are preconditioned by the comb section so that overflowwill no t occur in the integra tor stages.The conomicsof CIC filters derive from he followingsources: 1) n o multipliers are required;2 ) n o storage .is requiredfor filtercoefficients; 3 ) intermediatestorage is reduced byintegrating a t the high sampling rate and com b filtering at thelow sampling rate, compared to th eequivalent implementationusing cascadeduniform FI R filters; 4) the structure ofCICfilters is very regular consisting of tw o basic building blocks;5) littleexternalcontrolorcomp licated ocal iming is re-
quired; 6) the same filter design can easily be used for a widrange of rate change factors , R , with the additio n of a scalincircuit and m inimal changes to the filter timing.Som e problems encou ntered with CIC filters include the folowing. 1) Registerwidthscanbecom e large for large ratchange factors, R. 2 ) The frequency response is fully deter-mined by only three integer parameters ( R , M ,an d N ) , esulting in a limite d range of filter characteristics.The application for CIC filters seems to be in areas wherehigh sampling rates make multipliers an uneconom ical choiceand areas where large rate change factors would require largamounts of coefficient storage or fast impulse response generation. For examp le, a system has been implemented consistingof 32 digital interpolators operating at about , 5 MHz. Eachinterpolator is built on a single PC board using the CIC technique. The filters have a variable rate change fac tor of up toR 512 implemented with N 4 stages andadifferentialdelay of M = 2 , resulting in a stopb and attenuatio n of 5 3 dBFor the rate change factor of 5 12, the filter consists of 409zeros. Although the num ber of zeros is large, the imp lemen tation is very economical, consisting of 7 dders and 1 1 storagregisters with n o coefficient storage or multipliers.
111. FREQUENCY HARACTERISTICSCIC filters have a low-pass frequency characteristic. The frequency response is given by (3 ) evaluated at
, i O ~ f / R ) (4where f is the requency relative to the ow sampling ratfJR. As part of the filter design process, R , M , an d N archosen to provide acceptable assband haracteristics ovethe requency range from ero to apredetermined utofffrequency f, xpressed relative to the low sampling rate. Thepower response is
For large rate change factors R , the power responsecan bapproxim ated over a limited frequency range bysir^;^]'" 1P ( f ) = Rh- f o r O < f < - - .A4Thisapproximation canbe used formany pra$icaldesignproblems. For examp le, the error between P an d P s less than1 dB forRM> 10, l < N < 7 an d 0 f 255 / ( 256M ) .For the power response of(5) and (6),nulls exist at multipleof f l/M. Thus, he differential delay M can be usedas design parameter to control the placement of nulls. For CICdecimation filters, the region arou nd every Mt h null is foldedint o the passband causing aliasing errors; for CIC interpolationfilters, imaging occurs in the regions around these same nullsSpecifically, these aliasing/imaging ban ds are
(i f , ) < f +f,> (7fo r f 3 an d 1 , 2 , 1 R / 2 ]where is the largest integer not greater than
AlultIXDoM1a1UfIX Ra
-
7/30/2019 An Economical Class of Digital Filters for Decimation and Interpolation-FoL
3/8
HOGENAUER: DIGITAL FILTERS FORECIMATION AND INTERPOLATION 1 5 1
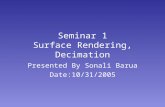
Fig. 3. Example frequency responseorN 4,M R 7, nd f,TABLE IPASSBANDTTENUATIONOR LARGE AT ECHANGEACTORS
elative Bandwidth-ifferential Delayroduct O l f c )
1/1281/641/321/161/81/4
Passband. Attenuation at fc (BB)a Functlon of
Number of Staqes i N )1
0.000.000.010.060.220.91
0.000.010.030.110.451.62
3
0.000.010.040.170.672.74
examp le power response is given in Fig. 3 for an Nstage CIC filter with a differential delay of M 1 and a ratechange factor of R 7. The passba nd cutoff is at f, withthe aliasing/imaging bandscenteredaround henulls at fre-quencies of 1 , 2 , an d 3 relative to the low sampling rate.For practical design prob lems , he aliasing/imaging errorscan be characterized by the maxim um error over all aliasing/imaging bands.For large class of filter design problemswhere f, 1/2M, this maxim um occurs at the lower edge ofthe first aliasing/imaging b and atf A I 1 f c . (8)
Tables I and I1 are presented as an aid in determining hetradeoffsetweenandwidth,assbandttenuation,ndaliasing/imaging erro r. It is assumed that the rate change factoris large, so the power response approximation of (6) can beused. In these tables attenu ations are calculated relative to themaximum filter response atThe passband attenuations given in Table I are constant fora given relative bandwidth-differentialdelayproduct (Mf,);howev er, his is not the case for the aliasing/imaging att en u-ation given in Table 11. Here, two values of differential delay,M = an d 2 are tabulated;differentialdelaysgreater hanthese seem t o be of less value.
IV. CIC DECIMATIONILTERDESIGNA . Design Overview
This section presents design cons ideration s for CIC decima-tion filters. The most significant bit (MSB) of these filters isdetermined as a function of th e overall register growth. This is
TABLE I1ALIASING / IMAG ING ATTENUATIONOR LARGE AT E H A N G E FACTORS
Aliasing/Imaging Attenuatior. zt f IA ( dB lDiffer-Delayentia1
a of Number of Stages ( N )elativeBandwidth(M)
(fc) 4 5 6
1
62.72.31.81.40.90 .5/4102.85. 68.51.44.3 17.1/8141.517.94.30.77.23.6/16179.049.219.49.59.79.8/32 1215.980.044.008.02.06.0/64252.510.468.326.24.22.1/128
2
106.99.11.33.45.67.8/8142.518.75.01.27.53.7/16179.349.419.59.69.89.9/32
160.044.a08.02.06.0/64252.510.468.326.24. 22. 1/128
240.792.544.46.38.11/256
followed by a dem onstration that trun cation or rounding maybe used a t each stage of filtering, the retained number of bitsdecreasing m ono tonically from stage to stage. An explanationis given which elates the runcat ionor ounding n nter-mediate stages to the otal error in the ou tpu t dat a stream.This explanation is then turned around so that the filter de-signer can determine the amoun t of truncation or rounding toapply at each stage, withoutviolating design constraints.It is assumed that the desired frequency characteristics havealreadybeendetermined using inform ation inSectionresulting in choices for the rate change factor R , differentialdelay M , and number of stages N. It is also assum ed through-out this section and Section V that twos com plement arith-metic is being used.B. Register Growth
The system function from the jt h stage up t o and includingthe last stage can be expressed as a fully expanded polynomialin z - l . The resulting function is
j = 1 , 2 ; . . , N2 h j ( k ) z - k R M ,2 N + 1 - ik=O
j = N + I ; . . , 2 N (9a)where
AlultIXDoM1a1UfIX Ra
-
7/30/2019 An Economical Class of Digital Filters for Decimation and Interpolation-FoL
4/8
1 5 8 IEEE TRANSACTIONS ONCOUSTICS,PEECH, ANDIGNAL PROCESSING,OL. ASSP-29, NO. 2, APRIL 1981
are th e impulse response coefficients. This func tion is derivedin Appendix I.The maxim um register grow th is define d as the max imumou tpu t magnitude resulting from the worst possible inp ut sig-nal relative to th emaximum nputmagnitude. Thisgrowthis used in the CIC filter design process to insure tha t no dataare ostdue t o register overflow. Using thisdefinition, hemaximum register grow th from he first stage up o and n-cluding the last stage is simply
(RM-1)NG m a x = Ihl(k)l- ( loa)k= O
It is shown in Appendix I1 that this can be simplified t oGmax ( l o b )
If the numb er of bits in the input data stream is Bin, henthe register growth can be used to calculate Bmax,he mos tsignificant bit at the filter output. That is,B,,, [Nlog, RM Bin 11 (1 1)
where th e least significant bit (LSB) of he npu t register isconsidered to be bit number zero and where [x1 is the smallestinteger not less thanNot only is B,,, th e MSB at the filter output, but it s alsoth e MSB for all tages of he filter.This canbe shownbyapplying modulo arithmetic to the filter output function. Fo rtwos complementarithmetic, h emodulooperation can beimplem ented b y simply eliminating bit positio ns above B,,,Since the modulo operation is used at the filter outp ut, thesame modulo operation can be applied independently to eachintegrator and com b stage. This implies that B,,, is an upperbound for each ilter stage.It is now shown that B,,, is also a lower boun d. Since thefirst N stages of the filter are integrators with unity feedback ,it is apparent that the variance of the integrato r outputs growwithoutbound oruncorrelated nputdata. As een at heoutput register, B,,, is the MSB for each integrator since thisis a significant bit and is the highest order bit that can propo -gate in to the outp ut register. Since a propagation path mustbe provided through the comb section for this MSB, it can beconcluded that B,,, must be the MSB not only for the inte-grators, bu t also for the combs that follow .C Truncation and Round ing
B,,, is large for many practica l cases and can result in largeregister widths; however, trunc ation or rounding may be usedat each filter stage redu cing register widths significantly.To calculate the total error at the filter outp ut due to trun -cation or rounding, the mean and variance of the error at eacherror sou rce is determ ined and then the correspo nding statisticsat th e filter o utput due to th e source alone is determined. Thetotal mean and variance at the outpu t is then determined asthe sum of the statistics from hese individual sources.There are a totalof 2 N 1 error sources: he firs t 2 N sourcesarecaused by runcationor oundingat he nputs to he2 N filter stages. The last error source is due to truncation orrounding going into the output register. The error sources are
given indexes corresponding to th e filter stage numbers shownin Fig. 1, with 2 N 1 identifying the error source going intothe outp ut register.It is often assumed that rounding is always better tha n trun-cation, however, in the following paragraphs it is show n thatexceptfor he firstand asterrorsources, theoutputerrorstatistics are the same for both runca tion nd roundingFurthermore, to keep the output error within bounds, mospractical designs will make use of full precision arithmetic athe firsterrorsource. As a result, he only place where thedesigner need worry about truncation versus rounding is at thlast e rror source going into the ou tput register.It is assumed thateacherrorsourceproduceswhite noisethat is uncorrelated with he nput and other error sourcesFurthermo re, the error at the j t h source is assumed to have auniform p robability distribution w ith a width f
E . = 0, if no truncation no r rounding2Bi, otherwisewhere Bj is the numbe r of LSBs discarded at the jth sourceIt can be shown tha t since the erro r has a unifo rm d istributiothe mean of the errors
E j , if truncationotherwise
and the variance of the erro r is
To determine the statistics at the output due to the jt h errosource, we use the system unction rom he jt h stage upthrough the last comb as given by (9). The impulse responsecoefficients correspond t o indepe ndent random processes thaare summ ed together to produce one filter output. The errormeanand variance corresponding to the kt h coefficien tar esimply p j h j ( k ) and u!h;(k), respectively, an d since the pro-cessesare indepen dent over k , the otalstatisticsat he jthstage are the sums of the statistics for each impulse responsecoefficient. That is, the total mean is
whereh i @ ) , j = 1 , 2 , - - - , 2 N
(1 53j = 2 N t 1is designated the mean error gain for the jt h error source,Similarly, the total variance is
where
is designated the variance error gain for the jth error sourceThe two error gains are used to relate the statistics at the erro
AlultIXDoM1a1UfIX Ra
-
7/30/2019 An Economical Class of Digital Filters for Decimation and Interpolation-FoL
5/8
HOGENAUER: DIGITAL FILTERS FOR DECIMATION AND INTERPOLATION
source to thoseat he out put andareuseful in the designprocess because they are indep endent of the actual error.It can be demo nstrated hat he mean error gain given by(15b) is zero for all but he first and ast error sources andfurth erm ore, the expression for the first error source can besimplified . This results in the form
Fro m (12) and (14) it is noted th at the error variance is thesame foreither runcationor ounding and the otalerrormean given by (15a) and (17) is zero for all but the first andlast error sources. As a result, the choice of truncation versusrounding does not affect the errortatistics except fo r the firstand last error sources.The tota l mean an d variance at the ou tput due to truncationand/or rounding are
an d
Using th e foreg oing inform ation relating error at th e sourcesto erro r at the ou tput, we can now work backwards to dete r-mine thenum ber of bits to discard given appropriateerrorconstraints. n hisprocess,only hevarian ce is used as ade -sign parameter since it is affected by truncation and roundingat all error sources. On the othe r han d, the mean is affected-by runcationand oundingonlyat he irstand asterrorsources.It is assumed that the number of bits retained in the outputregister is Bout ,so the num ber of LSBs discarded is
B 2N+1 - B m a x -Bout (20)The resulting error variance u%2N+Is defined by (1 6).
A legitimate design decision at this poin t is t o make the vari-ance from the first 2 N error sources less than or equal to thevariance for his ast error source, and also to distribute heerror bou t equally mongheseources.Thisesults inthe following design equation orchoosing henumber ofL SBs t odiscard at each stage:
for 1 ,2 , ,2 N. This equation is derived in Appendix 111.D. Design Example
We wish to design a decimation filter to reduce the sam plingrate from 6 MHz to 24 0 kHz with a passband of 30 kHz. Thealiasing attenu ation mu st be better than 60 dB with a falloffin the passband of less than 3 dB. The number of bits in theinput and outpu t registers is B in Bout 16.We note that the rate change factor is R 25 and the ban d-
r---------
I
Fig. 4. CIC building blocks. (a)4 it integrator; bit comb.
width relative to th e low sampling rate is f, Referringto Tables I and we see that a filter with N = 4 stages and adifferential delay of M 1 results in an aliasing atten uati on of68.5 dB and a passband attenu ation of 0.90 dB. T o simplifythedesign, runcation is used a t all stagesof the filter. Wecalculate he MSB for he ilter as BmaX 34 resulting n
Using (1 5a), (1 6 ) , and (17 ) we calculate the error gain foreach stage and using (21) we determ ine the num ber of LSBsdiscarded for the 2 N f il te r s tages to be 1 ,6 ,9 ,1 3 , 14, 15, 16,and17, respectively. Using (18)and 19) we calculate thetotal meanand tandarddeviationassumingabinarypointto the right of the LSB of the outp ut register. The mean isPT/219 1.245 andhetandard eviation of 0.373 .The decimator is to be implemented in hardware using 4 bi tparts. As a result, the register lengths in this example, exceptfor the first ntegrator, can be truncatedup to he nearestmultiple of 4 bits resulting inLSBs to be discarded for he2Nstagesof0,3,7,11,11,15,15,and 15,respectively.Th emean is now educed to PT/219 and he tandarddeviation is slightly bettert 0.301.The design uses two basic building blocks: a 4 bit integratorshown in Fig. 4(a) and a 4 bit co mb how n in Fig. 4(b). Theseare combined in Fig. to form the composite CIC decimator.Each building block has a 4 bit input, 4 bit outpu t, carry-inand carry-out. A comb stage built from the 4 bit comb build-ing blocks requires a subtraction on the feed-forward path. It
B2N+1 19.
AlultIXDoM1a1UfIX Ra
-
7/30/2019 An Economical Class of Digital Filters for Decimation and Interpolation-FoL
6/8
160 IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. ASSP-29, NO. 2 , APRIL 198
Fig. 5. Example CIC decimation filter for N M 1,and R 25.
is implementedby aking he ones complem ent (inverting)and using the low order carry-in port to form the twos com-plement result.V. CIC INTERPOLATIO NILTERDESIGN
A . Design OverviewThis section presents design consideration s for CIC interpo-lation filters. For each filter stage the minimu m register widthis determined. Rounding cannot be used for CIC interpolators(except going into heoutpu t register); the ntroductionofsmall erro rs in the integrato r stages causes the variance of theerror to grow witho ut boun d resulting in an unstable filter.
B. Register GrowthThe derivation of minimum register width for the jt h filterstages rather traightforward .First,he ystemunctionfrom the filter input up to and including the jth stage is deter -mined. The system function together with a worst case inpu tsignal are used to evaluate the maximum register growth up tothat point, and he grow th ogethe r with he nput registerwidth is used t o d etermine the minimum register width at thej th s tage.Using this approach, the m aximum register growth up t o thejt h stage can be shown to be1 , 2 ; . * , N
assuming tha t the inpu t signal producing his register growthis at the low sampling rate f,/R. The minimum register widthbased on this growth isWi [Bin log, Gj] (23)
where Bin is the input register width .When the differential delay is one, then , according t o (23),the width of th e last comb is actually larger than the width ofthe first integrator that follows. Using the modulo arithmeticargu men t introdu ced n Section IV, we can establish the special
1 1 1 1Fig. 6 . Example CIC interpolation filter N A4 and R 64 to512.
condition for the ast comb such thatW N = B i , + N - 1 i f M = 1. (24
After the last integrator, truncation, or rounding can e usedgoing in to the ou tpu t register. This is the only source of arithmetic error in CIC interpolators. If the number of bits in theoutput register is B o u t , hen the number of LSBs discarded isBT w2N Bout. (25
Assuming theerror hasauniformprobabilitydistributionand with the binary point to the right of th e LSB of the outpu t register, the error mean is 0.5 for truncation and zero (0fo rounding;he rror tanda rd deviation 0.289.C Design Example
We are to design an interpolation filter t o handle rate changefactorsof R 64 ,1 2 8 ,25 6, and 512, resulting na inalsample rate of 5 MHz. The input and output register widthsar e B i n = B ou t 8. Trunca tion is used going into the out putregister. We kno w from other cons idera tions hat an N 4stage fdter with a differential delay of M 2 will meet fre-quency design requirements.Since the same filter will be used over a range of rate changefactors, maximum register widths must be chosen over all rat
change factors. These maximumwidthsoccur for R 512the max imum rate change factor. The hardwa re design musinclude shifting hardware to choose the appropriate bits fromthe filter ou tput as a functionof the curre nt rate change factorThe register wid ths are calculate d using (23) esulting invalues of 9 , 10, 11 ,12 , 12 ,2 1 , 30 , nd 39 , respect ively . S ince4 bit parts are to be used, the actual widths implem ented ar1 2 , 1 2 , 12 , 1 2 , 1 2 , 2 4 , 3 2 ,and 40. The numb er of LSBs discarded going in to heout put register (as controlledby heshifting hardware) is BT 22 ,25 ,28 , o r 31 for the four ra techange fac tors.Fig. 6 shows the mplem entation of the nterpolator usingthe wo basic buildingblocksshown in Fig. 4. Hardware i
AlultIXDoM1a1UfIX Ra
-
7/30/2019 An Economical Class of Digital Filters for Decimation and Interpolation-FoL
7/8
HOGENAUER: DIGITAL FILTERS FOR DECIMATION A N D INTERPOLATIONrequired to vary the rate change factor. In addition, a chooseris required to select the out put bits. This selection is a func-tion of the rate hange factor.
VI. CONCLUSIONSIt has been shown that CIC filters are an economical alterna-tive to conventional dec imation and interpolation filters.CIC filters are implemented using acascade of ideal inte-grator stages operating at a high sampling rate and an equa lnumberofcomb stages operatingata ow am pling ate.These filters equire no multipliersand use limitedstorage;their regular structure, demonstrated by Figs. 5 an d 6 , simplifytheir implem entation in .hardware; they can be applied easily
to problemsrequiringarate change facto r hat is selectableover a wide operating ange.The frequ ency resp onse o f CIC filters is fully determ ined byonly hree nteger parameters resulting n a imited rangeoffiltercharacteristics. Th e aliasing/imaging error n th e pass-band anbeheldwithin rbitrarybounds by appropriatechoice of these parameters. How ever, the bandwidth and thefrequency response outside the p assband are everely limited.For CIC decimation filters, truncation or rounding may beused at each stage of the filter with a nondecreasing numberofLSB's discarded at successive stages. Th e MSB of eachstage is propo rtional to the maximum register growth expectedat he filter ou tp ut . This equires tha t all stageshave thesame MSB.For CIC interpolation filters, theuse of truncation or round-ing will produ ce an unstable filter response. As a result, fullprecision arithmatic must be used at each stage of th e filter.Unlike CIC d ecimators, however, the MSB increases in succes-sive stages with the MSB of each stage being proportional tothe registergrowth from he filter input up to the stage inquestion.
APPENDIXSYSTEMFUNCTION OR CIC DECIMATORSIn this Appendix we derive (9), the system fun ction for CICdecim ators rom he th stage up o and ncluding the laststage. The form of th e fun ctio n is tha t of a fully expandedpolynom ial n There re two cases expressedby (9):case 1 , where is in the range 1 t o N and case 2 , where is inthe range N t 1 to 2N .First we derive case 1. In this case there are N t 1 inte-grators and N combs. The system function is simply
~ f J - i + 1 ~ ; , 1 , , N . ( A l lSubstituting ( 1 ) an d ( 2 ) nto (Al ) results in
This equation can be expanded by dividing the deno minato rinto the num erator esulting in
k=O
A dim ensional analysis of (A3) ndicates that the ord er ofthe polynom ial in terms of z-l isM ( j - ) t ( R M - 1 ) ( N - t ) = ( R M - 1 ) N t j - 1 . (A4)
Thus, thesystem function can be expressed as a fully expandedpolynomial of the same order. The polynomial has the formH~(z) hj(k)z -k( R M - 1 ) N + j -
k= Owhere h j ( k )are the polynom ial coefficients.expansion. This results inAnother way of expressing (A2) is in term s of its binomial
l = O ( - 1 ) l ( y ) z - R M l ] . u = o r - j t u ) z - u ]
and taking the cross product of the twopolynomials results in
In this expression, terms with identical powers of z - l can becollected ogether.Thus, for aparticularnonnegative valuek , wherek = R M Z t v (As)
it is app aren t that can range over the integers1 = 0 , 1 , . * - ,k / R M ] 649)
without forcing ou t of range. Using (A8) and (A9) we cannow collect terms resulting in the fully expanded polynomia
j = 1 , 2 ; . - , N . (A10)The form of this polynom ial is the sameas A5) whe re herange of k is established as k 1 (RM l ) N t 1 .This results in (9) for case 1.We no w derive case 2 . In this case, where is in the rangeN t 1 , . , 2 N , there are 2 N t 1 combs and no inte-grators. The system function is simply
H j ( ~ ) = H : N + l - j , j = N t; . . , 2 N (A 1 1 )and substituting (2 ) into (A1 1) results in
H j ( z ) = ( l ~ - ~ ~ ) ~ ~ + ~ - j ,= N t I ; - . , 2 N . ('412)The binomial expansion of A 1 2 ) results in (9) for case 2 .
APPENDIX 1MAXIMUM EGISTERGROWTH N CIC DECIMATORSEquation ( 1 Ob) is derived resulting in a simplified expressionfor hemax imu m register growth n CIC decimators.Thisregister growth is defined by (1 Oa).It is appa rent hat sa), evaluated at is the system
functio n for the com posite CIC filter and is just an alternateAlultIXDoM1a1UfIX Ra
-
7/30/2019 An Economical Class of Digital Filters for Decimation and Interpolation-FoL
8/8
162 IEEERANSACTIONSNCOUSTICS,PEECH,NDIGNALROCESSING,OL.SSP-29,O. 2 , APRIL 1981
form of (3). Combining these two equa tions results in UT. 2 Fj1 2B. 2I(RM-1)NH 1 ( Z ) h , ( k ) z - k .-INM-1 (A131 This equation combined with (A17) results in the inequality
k= O k= Oand evaluating (A1 3) at z 1 results in
HI(1) h,(k) (my .R M - l ) Nk
Taking the logarithm base 2 of (A19) and rearranging ermsresults in1 6In equation (A13) it is noted that the system function is the Bj -logzFj t og, u ~ ~ ~ + ~log,2 N (A20)product of N system functions of the form
One choice of Bi is the largest nteger not greater han theY k . (A15)xpression onhe right-hand side of (A20). Thishoiceesults
k in (2 1).Sincehisolynomialas all positiveoefficients, it follows REFERENCESthat the produ ct of tw o or more of these polynomials resultsin apolynomial tha t alsohas all positivecoefficien ts. As aresult we can equ ate the coefficients with their absolute values.This results in a version of (A14) with the form
Substituting hisexpression nto (lo a) results in (lob) , heequation t o be derived.APPENDIX11DESIGN QUATION OR CIC DECIMATORS
In his Appendix, (21) is derived. The equation is used nthe design of CIC decimators to determine henumber ofLSBs to discard at each stage of filtering. The design criteriais to make the variance from he first 2N error sources lessthan or equal to the variance from the last error source (i.e.,error source 2N l), and also to distribute the error aboutequally among these sources. These criteria can be expressedby the inequality
2N.In (12) if one assumes that either trunca tion or rounding isbeing used then (12), (14), and (16a) can be combined result-ing in
11 R. E. Crochiere and L. R. Rabiner,OptimumFIRdigital filterimplementations for decimation, nterpolation,and narrowbandfiltering, IEEE Trans. Acoust.,Speech, SignalProcessing, vol.[2 ] L. R.RabinerandR. E. Crochiere, A novel mplementation fornarrowbandFIRdigitalTiters, IEEE Trans. Acoust., Speech,Signal Processing,vol. ASSP-23, pp. 457 -46 4, Oct. 1975.[3 ] R. E. Crochiereand L. R. Rabiner,Furtherconsiderations inthe design of decimators and interpolators, IEEE Trans. Acoust.,Speech, Signal Processing, vol. ASSP-24, pp. 296-3 11, Aug. 1976.[4 ] D. J. Goodman and M . J. Carey, Nine digital filters for decima-tion ndnterpolation, IEEE Trans. Acoust., Speech, SignalProcessing,vol. ASSP-25, pp. 121-126, Apr. 1977.[5] A. Peled and B. Liu, New hardware realizations of digital filters,IEEE Trans. Acoust ., Speech, SignalProcessing, vol.ASSP-22,pp. 456-462, Dec. 1974.
ASSP-23, pp. 444 -45 6, Oct. 1975.