Algoritmi di riconoscimento in FPGA · FPGA: tool flow Simulink Model SysGen ... Siamo disponibili...
3
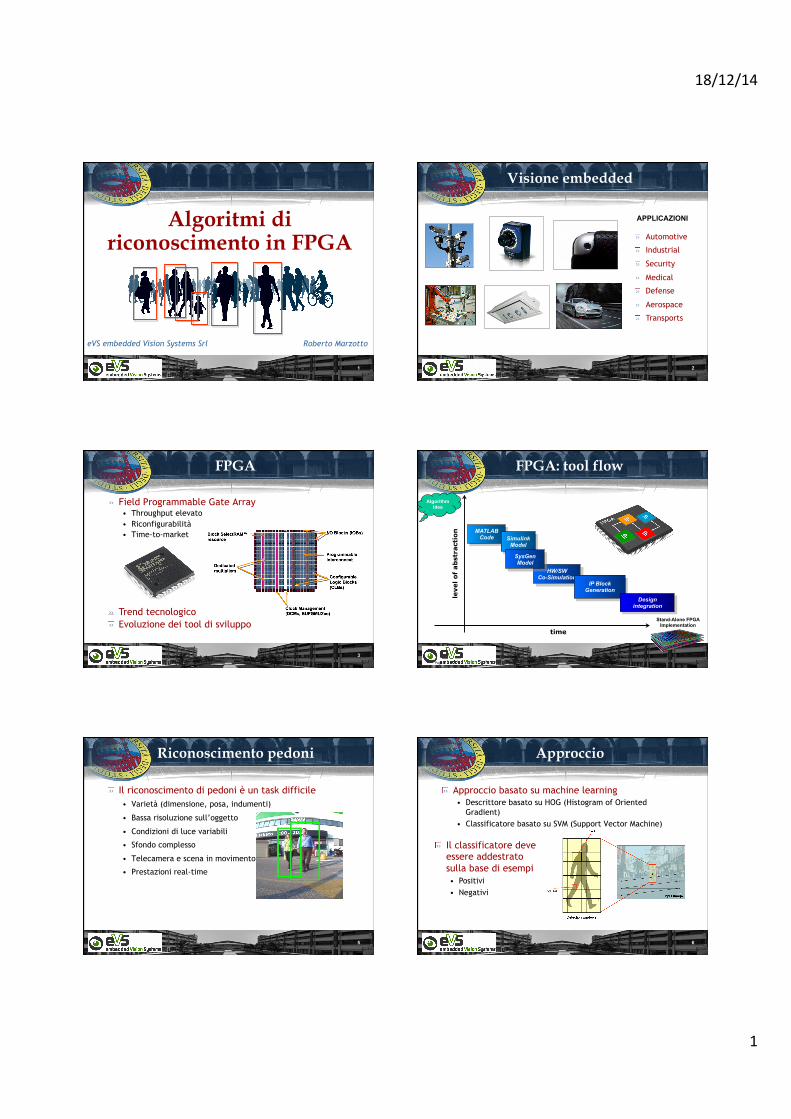
18/12/14 1 1 Algoritmi di riconoscimento in FPGA Roberto Marzotto eVS embedded Vision Systems Srl 2 Visione embedded Automotive Industrial Security Medical Defense Aerospace Transports APPLICAZIONI 3 Field Programmable Gate Array • Throughput elevato • Riconfigurabilità • Time-to-market FPGA Trend tecnologico Evoluzione dei tool di sviluppo Page 4 MATLAB Code Stand-Alone FPGA Implementation HW/SW Co-Simulation IP Block Generation Design integration Algorithm Idea time level of abstraction FPGA: tool flow Simulink Model SysGen Model 5 Il riconoscimento di pedoni è un task difficile • Varietà (dimensione, posa, indumenti) • Bassa risoluzione sull’oggetto • Condizioni di luce variabili • Sfondo complesso • Telecamera e scena in movimento • Prestazioni real-time Riconoscimento pedoni 6 Approccio basato su machine learning • Descrittore basato su HOG (Histogram of Oriented Gradient) • Classificatore basato su SVM (Support Vector Machine) Approccio Il classificatore deve essere addestrato sulla base di esempi • Positivi • Negativi
Transcript of Algoritmi di riconoscimento in FPGA · FPGA: tool flow Simulink Model SysGen ... Siamo disponibili...
18/12/14
1
1
Algoritmi di riconoscimento in FPGA
Roberto Marzotto eVS embedded Vision Systems Srl
2
Visione embedded
! Automotive
! Industrial
! Security
! Medical
! Defense
! Aerospace
! Transports
APPLICAZIONI
3
! Field Programmable Gate Array • Throughput elevato • Riconfigurabilità • Time-to-market
FPGA
! Trend tecnologico ! Evoluzione dei tool di sviluppo
Page 4
MATLAB Code
Stand-Alone FPGA Implementation
HW/SW Co-Simulation
IP Block Generation
Design integration
Algorithm Idea
time
leve
l of
abst
ract
ion
FPGA: tool flow
Simulink Model
SysGen Model
5
! Il riconoscimento di pedoni è un task difficile • Varietà (dimensione, posa, indumenti)
• Bassa risoluzione sull’oggetto
• Condizioni di luce variabili
• Sfondo complesso
• Telecamera e scena in movimento
• Prestazioni real-time
Riconoscimento pedoni
6
! Approccio basato su machine learning • Descrittore basato su HOG (Histogram of Oriented
Gradient) • Classificatore basato su SVM (Support Vector Machine)
Approccio
! Il classificatore deve essere addestrato sulla base di esempi • Positivi • Negativi
18/12/14
2
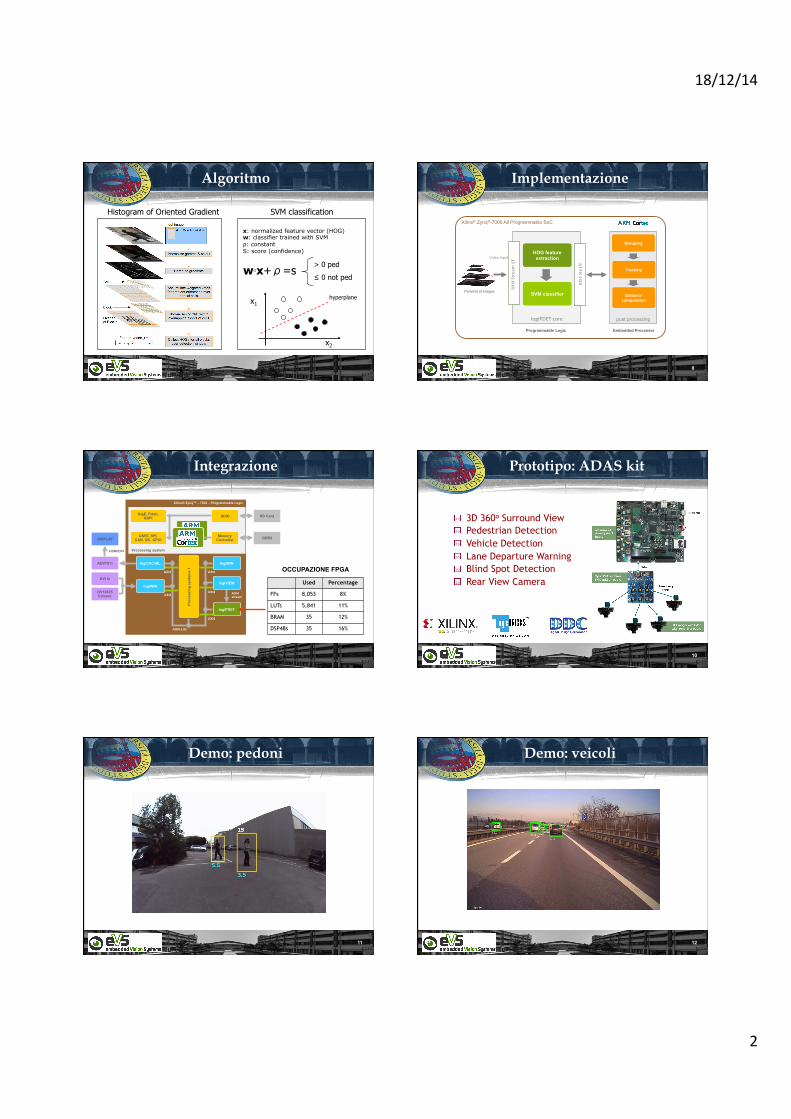
Histogram of Oriented Gradient SVM classification
w◦x+ρ=s
x1
x2
x: normalized feature vector (HOG) w: classifier trained with SVM ρ: constant S: score (confidence)
hyperplane
> 0 ped
≤ 0 not ped
Algoritmo
8
Implementazione
post processing
Pyramid of images
Grouping
Embedded Processor
Distance computation
Tracking
Programmable Logic
logiPDET core
AXI4 lite I/F
AXI4 Stream I/F Video input
HOG feature extraction
SVM classifier
Xilinx® Zynq®-7000 All Programmable SoC
Xilinx® Zynq™ – 7020 – Programmable Logic
Processing system
SD Card
DDR3 DISPLAY
ADV7511
DVI in
SDIO
Memory Controller
GigE, Flash, QSPI
UART, SPI, CAN, I2C, GPIO
logiPDET
logiWIN
logiVIEW
logiCVC-ML
HDMI/DVI
AXI4
AXI4
AXI4
AXI4
AXI4
AXI4-Lite
AXI4 stream
OV10635 Camera
Proc
essi
ng s
yste
ms
7
logiWIN
Integrazione
Used Percentage
FFs 8,053 8%
LUTs 5,841 11%
BRAM 35 12%
DSP48s 35 16%
OCCUPAZIONE FPGA
10
Prototipo: ADAS kit
! 3D 360o Surround View ! Pedestrian Detection ! Vehicle Detection ! Lane Departure Warning ! Blind Spot Detection ! Rear View Camera
11
Demo: pedoni
12
Demo: veicoli
18/12/14
3
13
Demo: DPM
! eVS si occupa di innovazione tecnologica, progetti di ricerca in collaborazione con l’Università di Verona
! Siamo disponibili ad ospitare tesi triennali, specialistiche e stage in azienda
www.embeddedvisionsystems.it
Progetti studenti
» Teorie e Tecniche di Riconoscimento • Prof. Marco Cristani
» Visione Computazionale • Dott. Umberto Castellani
CORSI SUGGERITI