
Adcs orbit intro
38
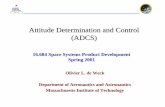
Chapter1 ALEXSAT CHAPTER (1) 1.1 Satellite Orbits After a satellite is separated from launching vehicle, it moves in a path around the Earth called an orbit. Satellite orbiting Earth due to the balance between two forces, gravitational force which attracts the satellite towards the Earth and centrifugal force (due to linear velocity of the satellite in orbit ) which causes repulsion of the satellite out from Earth,see Figure (1-1.) During satellite mission design, the orbit is chosen which is appropriate to its mission. So, a satellite that is in a very high orbit will not be able to see objects on Earth as many details as orbits that are lower, and closer to the Earth's surface. Similarly, the satellite velocity in orbit, the areas observed by the satellite, and the frequency with which the satellite passes over the same portions of the Earth are all important factors in satellite orbit selection. Essentially, there are six orbital parameter called classical Keplerian orbital elements define the orbit as shown in Figure (1-3). Figure (1-1) Gravitational force and the centrifugal force acting on bodies orbiting Earth 1. Semi-major axis. a This is a geometrical parameter of the elliptical orbit. It can, however, be computed from known values of apogee and perigee distances as for definition of apogee and perigee see Figure (1-2). By Ahmad Farrag 2011 [email protected]
-
Upload
faraagahmad -
Category
Engineering
-
view
371 -
download
8
description
this document give a good introduction to satellite orbit and satellite attitude control subsytem
Transcript of Adcs orbit intro

Chapter1 ALEXSAT
CHAPTER (1)
1.1 Satellite Orbits
After a satellite is separated from launching vehicle, it moves in a path
around the Earth called an orbit. Satellite orbiting Earth due to the balance
between two forces, gravitational force which attracts the satellite towards the
Earth and centrifugal force (due to linear velocity of the satellite in orbit )
which causes repulsion of the satellite out from Earth,see Figure ( 1-1.) During
satellite mission design, the orbit is chosen which is appropriate to its mission.
So, a satellite that is in a very high orbit will not be able to see objects on Earth
as many details as orbits that are lower, and closer to the Earth's surface.
Similarly, the satellite velocity in orbit, the areas observed by the satellite, and
the frequency with which the satellite passes over the same portions of the
Earth are all important factors in satellite orbit selection. Essentially, there are
six orbital parameter called classical Keplerian orbital elements define the orbit
as shown in Figure ( 1-3).
Figure ( 1-1) Gravitational force and the centrifugal force acting on bodies
orbiting Earth
1. Semi-major axis. a This is a geometrical parameter of the elliptical
orbit. It can, however, be computed from known values of apogee and
perigee distances as for definition of apogee and perigee see Figure
( 1-2).
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
( 1.1) 2
perigeeapogeea +=
2. Eccentricity. e The orbit eccentricity is the ratio of the distance between
the centre of the ellipse and its focus to the semi-major axis of the
ellipse see Figure ( 1-2).
3. Right ascension of the ascending node Ω . it tells about the orientation of
the line of nodes, which is the line joining the ascending and descending
-nodes, with respect to the direction of the vernal equinox See Figure
( 1-3).
Vernal equinox is the line that intersects the Earth's equatorial plane and
the Earth's orbital plane, which passes through the centre of the Earth with
respect to the direction of the sun on 21 MarchError! Reference source not
found..
(a) (b)
4. Inclination i . is the angle that the normal to the orbital plane of the
satellite makes with the normal to the equatorial plane , Figure ( 1-4).
5. Argument of the perigee W. This parameter defines the location of the
major axis of the satellite orbit. It is measured as the angle ω between
the line joining the perigee and the focus of the ellipse and the line of
nodes in the same direction as that of the satellite orbit, see Figure ( 1-4).
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
Figure ( 1-2) apogee ,perigee of the orbit and semi-major axis
Figure ( 1-3) Right ascension of the ascending node
6. True anomaly of the satellite fo. This parameter is used to indicate the
position of the satellite in its orbit. It is defined as the angle, between the
line joining the perigee and the centre of the Earth with the line joining
the satellite and the centre of the Earth, see Figure ( 1-4)
Orbits can be classified according to different criteria, such as
1. According to orbit Altitude
o Low Earth Orbit (LEO): orbit altitude ranging in altitude from 200–1000 km
o Medium Earth Orbit (MEO): orbit altitude ranging from 1000 km to just below geosynchronous orbit at 35786 km.
o High Earth Orbit (HEO): orbit altitude above 35786 km.
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
Figure ( 1-4) Keplerian orbital elements
2. according to inclination
o Equatorial orbit : an orbit that co-planed with the equator i.e. orbit with zero inclination
o Polar orbit: An orbit that passes above or nearly above both poles of the Earth on each revolution. Therefore it has an inclination of about 90 degrees
o Inclined orbit: An orbit whose inclination between 0 and 90 degrees.
3. according to Eccentricity o Circular orbit: An orbit that has an eccentricity of 0 and whose
path traces a circle o Elliptic orbit: An orbit with an eccentricity greater than 0 and less
than 1 whose orbit traces the path of an ellipse
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
1.1.1 Special Orbits
An important consideration in space mission design is determining the
type of Earth Orbit that best suits the design goals and purpose of the mission.
A brief description for the special orbits which frequently used such as; low
Earth orbit, medium Earth orbit, geostationary orbit, polar orbit, Sun-
synchronous orbit and Molniya orbit, is presented.
1.1.1.1 Low Earth Orbit (LEO)
Orbiting the Earth at roughly 200-1000 Km altitude: Almost 90 percent
of all satellites in orbit are in LEO. LEO is often utilized because of the low
launch requirements that are needed to place a satellite into orbit. LEO
satellites orbit the Earth in roughly 90 minute periods. This means that they are
fast moving, and sophisticated ground equipment must be used to track the
satellite, LEO is used for such missions as flight tests, Earth observations,
astronomical observations, space stations and scientific.
Figure ( 1-5) LEO, MEO and GEO
1.1.1.2 Medium Earth Orbit (MEO)
MEO sometimes called Intermediate Circular Orbit (ICO), is the region
of space around the Earth above low Earth orbit (1,000 kilometers) and below
geostationary orbit (35,786 Km).The most common use for satellites in this
region is for navigation, such as the GPS (20,200 Km) and Galileo
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
(23,222 Km) constellations. Communications satellites that cover the North and
South Pole are also put in MEO. The orbital periods of MEO satellites range
from about 2 o 12 hours. Telstar, one of the first and most famous experimental
satellites, orbited in
1.1.1.3 Geostationary/Geosynchronous Earth Orbit (GEO)
Satellite in geostationary orbit appears to remain in the same spot in the
sky all the time. Really, it is simply traveling at exactly the same speed as the
Earth is rotating below it, but it looks like it is staying still regardless of the
direction in which it travels, east or west. A satellite in geostationary orbit is
very high up, at 35,850 km above the Earth. Geostationary orbits, therefore, are
also known as high orbits; GEO is used for communications satellite
Figure ( 1-6) GEO satellites appear stationary with respect to a point on Earth
1.1.1.4 Polar Earth Orbit
For full global coverage of the Earth, a ground track would have to
cover latitudes up to ± 90o. The only orbit that satisfies this condition has an
inclination of 90°. These types of orbits are referred to as polar orbits. Polar
orbits are used extensively for the purpose of global observations.
1.1.1.5 Sun Synchronous Orbits (SSO)
A Sun-synchronous orbit (SSO) is a nearly polar orbit where the
ascending node precesses at 360 degrees per year or 0.9856 degrees per day.
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
Figure ( 1-7) Sun synchronous orbit
1.1.1.6 Molniya Orbit
Highly eccentric, inclined and elliptical orbits are used to cover higher
latitudes, which are otherwise not covered by geostationary orbits. A practical
example of this type of orbit is the Molniya orbit. It is a widely used satellite
orbit, used by Russia and other countries of the former Soviet Union to provide
communication services. Typical eccentricity and orbit inclination figures for
the Molniya orbit are 0.75 and 65° respectively. The apogee and perigee points
are about 40000 km and 400 km respectively from the surface of the Earth. It
has a 12-hour orbit and a satellite in this orbit remains near apogee for
approximately 11 hours per orbit before diving down to a low-level perigee.
Usually, three satellites at different phases of the same Molniya orbit are
capable of providing an uninterrupted service.
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
Figure ( 1-8) Molniya orbit
1.2 Reference Coordinate Systems
Several different reference coordinate systems or reference frames are
used to describe the attitude of a satellite in orbit. The most utilized coordinate
systems employed in attitude control problem are the inertial, Greenwich,
orbital, body, and device frames.
1.2.1 Geocentric Inertial Coordinate System
The Geocentric Inertial Coordinate System or Earth-Centered Inertial
(ECI)coordinate system has its origin in the Earth center The -axis points is
the axis of rotation of Earth. The -axis is in the direction of the vernal
equinox, and the -axis completes the right-hand rule for the coordinate
system. A demonstration for the geocentric inertial coordinate system is shown
in Figure ( 1-9).
IZ
IX
IY
1.2.2 Greenwich Coordinate System
The Greenwich Coordinate System or Earth-centered Earth-fixed
reference frame also has its origin at the center of the Earth, but it rotates
relative to inertial space, shown in Figure ( 1-10) The -axis direction is the GZ
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
GX
GY
Figure ( 1-9) Inertial coordinate system
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
Figure ( 1-10) Greenwich coordinate system
1.2.3 Orbital Coordinate System
The orbital coordinate system (OCS) is located at the mass center of the
satellite. This frame is non inertial because of orbital acceleration and the
rotation of the frame.
The motion of the frame depends on the orbit altitude. The -axis in the
direction from the satellite to the Earth , -axis in the direction opposite to
the orbit normal, and the -axis is perpendicular to the -axis and -axes
according to the right-hand rule . In circular orbits, is the direction of the
satellite velocity. The three directions , , and are also known as the roll,
pitch, and yaw axes, respectively. Figure ( 1-11) shows a comparison of the
inertial and orbital frames in an equatorial orbit.
OZ
OX OZ OY
OX
OX
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
Figure ( 1-11) orbital coordinate system
1.2.4 Body Coordinate System
Like the OCS frame, the body coordinate system has its origin at the
satellite’s mass center. This coordinate system is fixed in the body. The -axis in
the direction from the satellite to the Earth , -axis in the direction opposite to
the orbit normal, and the -axis is perpendicular to the -axis and -axes
according to the right-hand rule . In circular orbits, is the direction of the
satellite velocity. The relative orientation between the orbital and body frames
is the satellite attitude, when the satellite is nadir pointing OCS is co-onside
with BCS
By Ahmad Farrag 2011 [email protected]

Chapter1 ALEXSAT
Figure ( 1-12) Body coordinate system
1.2.5 Device Coordinate System
The device coordinate system is fixed at the device body (i.e. sensor or
actuator …). It define the orientation of the device with respect to satellite BCS
.As shown in Figure ( 1-13) the ZD- axis is Z-axis of the device 's body and XD-
axis is X-axis of the device 's body and YD-axis is perpendicular to ZD-axis and
XD-axis
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
CHAPTER (2)
ATTITUDE DETERMINATION AND CONTROL
SUBSYSTEM (ADCS)
In this chapter more detailed explanation about ADCS is introduced.
The impact of other subsystems requirements on ADCS and impact of ADCS
requirements on the other subsystems are presented. In addition, the tasks that
ADCS must perform all over the satellite lifetime and the ADCS operational
modes are describe. Then, an illustration for the physical concepts and
functions of ADCS devices such as sensors and actuators are exhibited.
Besides, different disturbances affecting rotational motion of the satellite are
demonstrated. Finally, the general control methods applied with ADCS are
presented. The control methods and
2.1 What is ADCS?
The attitude determination and control subsystem measures and controls
the satellite's angular orientation (pointing direction).The simplest satellite are
either uncontrolled or achieve control by passive methods such as spinning or
interacting with the Earth's magnetic or gravity fields. These may or may not
use sensors to measure the attitude or position. More complex systems employ
controllers to process the satellite attitude information obtained from sensors
and actuators torquers to control attitude, velocity, or angular momentum. SC
may have several bodies or appendages, such as solar array or communication
antennas, that required certain direction pointing. The complexity of the
attitude control subsystem depends on the number of body axes and appendage
to be controlled, control accuracy, and speed of response, maneuvering
requirements and the disturbance environment.
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
2.2 Internal influence between satellite mission and other subsystems
upon ADCS
ADCS is very closely coupled with other subsystems; it is interactively
influences and being influenced by other satellite’s subsystems. In the
following section, a briefer description for interaction between ADCS and
other subsystem is presented.
2.2.1 Internal influence between ADCS and Mission requirement
Main mission of the satellite imposes the main requirements on ADCS.
Normally, the requirements associated with the mission are
Earth pointing or inertial pointing ( this will affect in ADCS control
techniques)
• Accuracy /stabilization requirements (this will affect in accuracy of
selected ADCS sensors).
• Slewing requirements (this will affect in selection of actuators types)
• Mission life time (this will affect in life time of selected ADCS devices)
• Orbit parameters (this will affect in the magnitude of environment
disturbance which will perturb ADCS)
2.2.2 Internal influence between ADCS and Structure Subsystem
The ADCS Subsystem directly interacts with the structure subsystem.
The structure of the satellite affects the space craft moment of inertia and
location of its center of mass, which is affecting the dynamics and stability of
the satellite. Also, the rigidity of the structure determines whether the model of
the satellite will be a rigid body or a flexible one. In addition, mounting
accuracies of ADCS devices are one of the main constrains upon the structural
design of the satellite.
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
2.2.3 Internal influence between ADCS and Power Subsystem
The ADCS and the power subsystem are influencing each other. The
power budget of the satellite must take into account the requirements of the
ADCS sensors and actuators during different operational modes. For satellite
using solar panels, there are additional pointing requirements placed on the
ADCS, if solar panels must be kept aligned with the Sun for optimal
performance
2.2.4 Internal influence between ADCS and Communication Subsystem
If the satellite antenna is required to be pointed within a given accuracy
in order to communication with ground station, the Communication subsystem
will add pointing requirements on the ADCS Subsystem during communication
session.
2.2.5 Internal influence between ADCS and Command and Data
Handling Subsystem
Since the Command and data handling subsystem is the main brain that
organizes the data flow between satellite subsystems; so it imposes
requirements on the volume and rate of data transfer to ADCS or from ADCS
to other subsystems.
2.2.6 Internal influence between ADCS and thermal subsystem
In order to keep temperature of the satellite’s components within
specific range the thermal subsystem may impose maneuver requirements on
ADCS, by pointing the hot side to deep space and pointing the cold side
towards the sun
2.3 ADCS Tasks
According to the previous mutual impacts of ADCS with other
subsystems, ADCS has the following tasks must to be executed all over the
satellite life time. That is, ADCS executing the following tasks from the
moment of separation up to de-orbiting or discarding of the mission.
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
1. Damping the satellite angular velocity, obtained from LV after satellite
separation.
2. Attitude acquisition of the satellite where the BCS is oriented to be
coincide with the assigned RCS (in Earth observation missions OCS will
be this RCS). In this attitude acquisition the satellite is initially oriented
towards the RCS supports the mission requirements.
3. The satellite three-axis stabilize in the RCS with the required accuracy
during the imaging sessions.
4. Three-axis stabilization in nadir pointing with low accuracy during non-
imaging periods
5. Attitude determination with the required accuracy during all ADCS
operational modes
2.4 Satellite operational modes
According to the above required tasks from ADCS, the ADCS
operational mode will be.
2.4.1 De-tumbling mode (DM)
This mode occurs after the satellite is released from the LV or after
loosing of orientation due to any failure. During this mode the ADCS suppers
the satellite angular velocity that received from the LV, Because of power
limitation this process should be completed within specified period.
2.4.2 Standby Mode (SM)
After DM satellite can have arbitrary attitude Automatically so after
finishing DM, ADCS transfers to SM in order to make attitude acquisition of
satellite (i.e. Orient the satellite BCS to be co-onside with OCS to get
stabilization at nadir pointing with low accuracy) and stay in this case
whenever there is no imaging tasks assigned to the satellite. In this mode the
satellite attitude should be kept even with a low accuracy to avoid loosing the
satellite’s attitude, it is a low accuracy mode. In this mode, the most important
thing is to save the system resources (i.e. lifetime of ADCS devices) and reduce
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
the consumed power. ADCS stay in SM about 95% of the whole satellite
lifetime
2.4.3 High Accuracy Mode (HAM) or Imaging Mode (IM)
In this mode, ADCS should provide the required control to achieve the
pointing of the payload requirements. As an example, for imaging remote
sensing satellite using magnetic actuator the satellite must be stabilized at nadir
with high accuracy during imaging periods, so this mode called imaging mode
(IM)..
2.4.4 Emergency Mode (EM)
In case of any failure in ADCS (e.g. loosing satellite attitude or any
failure of ADCS devices ) ADCS automatically transfer to EM .In this mode
ADCS switch off all ADCS devices and make diagnostic for ADCS devices
according to command from ground and send TM to ground in order to take
the suitable decision.
2.4.5 Transferring from one operational mode to another
The organization of transfer from one mode to another is shown in
Figure ( 2-1).ADCS operational cyclogram and conditions for transferring
between modes are as follows:
1. After separation from LV and starting of satellite operation ADCS
enters DM.
2. When DM is finished, ADCS directly transfers the satellite to SM and
stay in SM.
3. Before imaging time, within specified period (i.e. Period sufficient to
stabilize the satellite at the required attitude with the required
accuracy),ADCS transfers the satellite to IM.
4. After finishing of imaging task, ADCS transfers the satellite again to
SM
5. In normal cases, the sequence of items 3-4 are repeated.
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
6. In case of any failure (i.e. failure in ADCS devices or attitude
orientation ), ADCS directly transfers the satellite to EM.
DM
finishing
ADCS
failure
DM SM IM
EM
Imaging
command
Finishing imaging
session
ADCS
failure
ADCS
failure
Fixing of ADCS
failure
Figure ( 2-1) Organization of transferring from one operational mode to
another.
2.5 ADCS devices
A satellite in space must point to a given direction as assigned by the
mission requirements. Many satellites are Earth orientated while others are
inertial space object oriented such as sun or a star of interest. The orientation
of the satellite in space is known as its attitude. In order to achieve control and
stabilization of the satellite, attitude sensors are used to determine the current
attitude and actuators are used to generate required torque to maintain the
required attitude. This section gives brief description of the most common
used ADCS sensors and actuators.
2.5.1 ADCS Sensors
Sensors generally determine the attitude and pointing direction of
satellite with respect to reference objects, this object could be inertial space or a
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
body of known position. The most commonly used reference objects, Earth,
Sun, stars, geomagnetic field and inertial space.
2.5.1.1 Earth’s Horizon sensor
For near-Earth satellites the Earth covers a large proportion of the sphere
of view and presents a large area for detection. The presence of the Earth alone
does not provide a satisfactory attitude reference hence the detection of the
Earth’s horizon is widely used.
Horizon sensor is infrared device that detect the contrast between the
cold of deep space and the heat of the Earth’s see Figure ( 2-2). Horizon sensors
can provide pitch and roll attitude knowledge for Earth-pointing satellite. For
the better accuracy in low Earth orbit (LEO), it is necessary to correct the data
for the Earth oblateness and seasonal changes in the apparent horizon .Earth’s
Horizon sensor is used in AEROS-I,-2, MAGSAT, SEASAT
Figure ( 2-2) principle of Earth horizon sensor
2.5.1.2 Sun sensor
Sun sensor is widely used with satellite mission due to the special
features of sun as a space object. One of these features is the brightness of the
sun, which makes it easy to be distinguished among other solar and stellar
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
objects. also the Sun-Earth distance makes it appear as nearly a point source
(0.25 º). Those factors urge ADCS designer to rely upon sun sensors in high
pointing accuracy missions.
Sun sensor measures one or two angles between their mounting base
and incident sunlight. Categories of sensors are ranging from just sun presence
detector, which detects the existence of sun, rather accurate analogue sensor
measuring sun incidence angle, up to high accuracy digital instrument, which
measure the sun direction to accuracy down to one arc-minute. Typical digital
sun sensor is shown Figure ( 2-3).
Sun sensor is accurate and reliable, but require direct line of sight to the
sun. Since most low-Earth orbits include eclipse periods, the attitude
determination system should provide some way of handling the regular loss of
Sun vision. Sun sensor is used in AEROS-1,2 , GEOS-3, MAGSAT, SAGE,
SEASAT.
Figure ( 2-3) Sun sensors
2.5.1.3 Star mapper
Star mapper provides the most accurate absolute pointing information
possible for a satellite attitude. It contains Charged-Coupled Device (CCD)
sensors or Active Pixel Sensors (APS) which provides a relatively inexpensive
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
Figure ( 2-4) Start sensor
The accuracy and autonomy provided by a star camera would be
impossible without high-speed microprocessors for image processing and star
identification. Star sensor is used in ATS-6, Egyptsat-1, LANDSAT-D·,
MAGSAT.
2.5.1.4 Magnetometers
Magnetometers are simple, lightweight sensors that measure both the
direction and magnitude of the Earth’s magnetic field. They are reliable but
require complex software for interpretation and provide relatively coarse
attitude determination as compared to horizon, sun, and star sensors.
Navigational information are used with a computer model of the Earth’s
magnetic field to approximate the field direction at the satellite’s current
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
position. Comparison between measured and calculated earth magnetic field is
used to provide information about satellite orientation. Employing estimation
techniques such as Kalman filter, allows magnetometer to work as standalone
device for attitude determination. The Earth’s magnetic field also varies with
time and can't be calculated precisely, so a magnetometer is often used with
another sensor such as a sun, horizon or star sensor or a gyroscope in order to
improve the accuracy. Magnetometer is used in AEROS-1, Egyptsat1, GEOS-
3, SEASA.
Figure ( 2-5) flux-gate magnetometer
2.5.1.5 Inertial Sensor or Gyro
By definition, a gyroscope, is any instrument, which uses a rapidly
spinning mass to sense and respond to changes in the inertial orientation of its
spin axis. There are types of attitude sensing gyros: mechanical and optical
gyro. These sensors measure satellite orientation change.
• Mechanical Gyroscopes
The angular momentum of a gyro, in the absence of an external torque,
remains constant in magnitude and direction in space. Therefore, any rotation
of the satellite about the gyro's input axis results in a precession of the gimbal
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
Figure ( 2-6) Three degree-of-freedom gyroscope construction geometry.
• Optical Gyroscopes
Optical gyros are gyroscopes that utilize a light ring instead of a
mechanical rotor as the main component to determine rotational changes. All
optical gyros work on the same principle, the Sagnac effect, This effect works
on relativistic principles but can be described in "normal" terms. Two light
beams are traveling through circular paths of the same length but in opposite
directions around in an optical coil. If the optical coil is rotating, one of the
light beams will take a longer period of time to travel the circumference of the
coil. This time lag is measured and converted into a rotational rate for the coil.
Thus, the rotation the gyro is feeling can be measured. The length changes
associated with the light beam are of nuclear dimensions and are difficult to
measure. However, great accuracy can be achieved through the use of this type
of gyroscope. The most common devices of this type is the Ring Laser Gyro
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
(RLG) and Fiber Optic Gyros (FOG) .Gyros are used in ATS-6,
Egyptsat1,LANDSAT-D·, MAGSAT.
Figure ( 2-7) The QRS11Pro gyro used on Rømer
Typical values for accuracy of ADCS sensors are shown in the
following table
Table 2-1 Ranges of ADCS sensors accuracy
Sensor Accuracy
Earth’s Horizon sensor 0.05 deg. (GEO)
0.1 deg. (LEO)
Sun sensor 0.01 deg.
Star mapper 2 arc. sec.
Magnetometers 1.0 deg. (5,000 Km altitude)
5.0 deg. (200 Km altitude)
Gyro 0.001 deg./hr
2.5.2 ADCS Actuators
ADCS actuators are used to generate the required torque for correction
of satellite attitude. The generated torque is operated against the environmental
disturbance or to force the satellite to point to a cretin direction according to the
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
control system requirement. A brief description of the commonly used
actuators is presented in this section.
2.5.2.1 Momentum and Reaction Wheel
Momentum wheels and reaction wheels are similar in construction; they
are simply motor with a flywheel mounted on the motor shaft, the difference in
terminology resulting primarily from the speed at which they operate. A
momentum wheel typically operates at constant speed, providing a means of
momentum storage, which in turn provides gyroscopic stabilization to the
satellite. Reaction wheels generally operate at varying speed, providing means
of reacting torque. According to Newton's third law, as a torque is electrically
applied on the motor shaft to cause the wheel to accelerate, an equal and
opposite torque is generated on the satellite, causing the attitude to change.
Momentum wheels are commonly used singly or in pairs to provide spin
stabilization. Normally, reaction wheel system consists of four wheels. Three
reaction wheels are aligned to the satellite pitch, yaw and roll control axes. The
fourth wheel is skewed symmetrically with respect to the orthogonal control
axes. This commonly used configuration provides full redundancy for roll or
pitch or yaw in case of wheel failure. An image of typical reaction wheel is
shown in Figure ( 2-8)
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
Figure ( 2-8) The TELDIX Momentum and Reaction
Momentum and reaction wheels have the advantage of providing quick
and accurate attitude control. Also, they can be used at any altitude. Their
disadvantage is that they can be costly, massive, and require large amounts of
power. However, wheels may saturate since the RW is a motor that has
maximum speed, since the angular momentum that can be stored in the wheels
is limited, so a secondary control system is used to prevent the stored
momentum from reaching the maximum limit. The secondary control system
can be thrusters system or magnetorquers. Momentum and reaction wheels are
used in Egyptsat1, FLTSATCOM, MAGSAT and SEASAT Error! Reference
source not found..
2.5.2.2 Magnetic actuators
Magnetic actuators enforce a torque on the satellite by generating a
dipole moment, which interacts with the Earth's magnetic field. Generally,
there are two types of magnetic actuators, torque coils and magnetic rods or
magnetorqure.
1. Torque Coils
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
The torque coil is simply a long copper wire, winded up into a coil.
Generally, three coils are used, one coil in each axis as shown in Figure ( 2-9
The generated dipole moment by each coil is calculated by L
ANiL coil ⋅⋅= ( 2.1)
Where, is the current in the coil, N is the number of windings in
the coil, and A is the area spanned by the coil.
coili
Figure ( 2-9) Torque Coils
2. Torque Rods
Torque rods operate on the same principle as torque coils, but instead of
a large area coil the windings is spun around a piece of ferromagnetic material
with very high permeability as shown in Figure ( 2-10). Ferromagnetic
materials, have a relative permeability, , of up to 106. the generated dipole
moment is calculated by the following formula
η
L
ANiL coil ⋅⋅⋅= η ( 2.2)
Hence, generating specified dipole moment from magnetic rod needs
current much lower than that needed to magnetic coil. However, the weight of
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
magnetic rod increases drastically because of the metal core in the rods.
Another inconvenience of the torque rods is the hysteresis effect associated
with ferromagnetic core which add nonlinearity to the control loop. Advantages
and disadvantages of using magnetic actuator will be discussed in details in
Error! Reference source not found.. Magnetic actuators are used with
Egyptsat1, MAGSAT, TIROS-IX, LANDSAT-D and AEROS-1, 2Error!
Reference source not found. .
Figure ( 2-10) Torque rods
2.5.2.3 Thruster
Thruster works on the principle of Newton's third law, according to
which "for every action, there is an equal and opposite reaction". Referring to
this principle, if gas is propelled out of a nozzle, the satellite will accelerate in
opposite direction. However, if the nozzles are not pointed directly away from
the center of mass this will lead to cause rotational of satellite as well. In
addition, if two thrusters in opposite direction but not co-lined rotation only
will be generated. The source of the used gas defines the type of thruster .
Cold gass thrusters use high pressure storage tank. Hot gas thrusters use the
combustion of either monopropellant or bipropellant.
Six thrusters are needed to be mounted in pairs to generate the torque
needed for three-axis control. Thruster as actuator is highly accurate and
generate higher torque than RW and magnetic rods. On the other hand, the
structure used with the thrusters is large and heavy. Besides, run out of either
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
gas or propellant will lead to stop functioning of thrusters. Thrusters are used in
ATS-3,6 , FLTSATCOM, GOES-I and SKYNETError! Reference source not
found. .
Figure ( 2-11) Torque generated thruster mounted to satellite
2.6 Disturbance Environment
In an Earth orbit, the space environment imposes several external
torques that the ADCS system must tolerate. According to orbit altitude, three
or four sources of disturbing torques are affecting the space craftError!
Reference source not found. . These torques are; gravity gradient, magnetic
field effect, solar radiation pressure, and aerodynamic forces. Those
disturbances are affected by the satellite’s geometry, orientation, and mass
properties in addition to satellite orbital altitude.
2.6.1 Gravity Gradient Disturbance
Any object with nonzero dimensions orbiting Earth will be subjected to
a “gravity-gradient” torque. In short, the portions of the satellite that are closer
to the Earth are subjected to a slightly larger force than those parts farther away
Error! Reference source not found. . This creates a force imbalance that has
a tendency to orient the satellite towards the center of Earth in order to
compensate this imbalance. According to [Error! Reference source not
found. the gravity gradient torque can be determined by equation ( 2.3) . The
worst case torque arises at o90=Θ
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
)2sin(23
3 Θ−= iiZZgg JJR
T μ ( 2.3)
Where,
Tgg: is the resulting gravitational torque [Nm
μ: is the gravitational constant of the earth [m³/s² (μ = 3.896*1014m³/s²)
Jii :is the moment of inertia tensor for the satellite in i axis.(in body
coordinate system) [kgm² (i=x,y,z)
Θ Is the maximum deviation angel from the local vertical [rad
R: is the distance between satellite center of mass and earth center of
mass [km
The previous formula for calculation of gravity gradient is used to give
course estimation of gravity gradient disturbance torque but an accurate
formula given in Error! Reference source not found. is used in calculation of
satellite mathematical model
2.6.2 Magnetic Field Disturbance
Magnetic field torques are generated by interactions between the
satellite magnetic dipole and the Earth’s magnetic field. This satellite magnetic
dipole is the summation of two components; first component is the induced
magnetic dipole, which is caused by current running through the satellite
wiring harness and second component is the residual dipole moment, which is
caused due to magnetic properties of the satellite components. The satellite
magnetic dipole exhibits transient and periodic fluctuations due to power
switching between different subsystems. These effects can be minimized by
proper placement of the wiring harness. The magnetic torque is calculated by
following formula
BDTm ×= ( 2.4)
Where
D = the vector of total satellite magnetic dipole.
B = local geomagnetic field vector.
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
In the worst case, the vectors are perpendicular to each other and the
cross product turns into a product of scalar values.
2.6.3 Solar Radiation Pressure Disturbance
Solar radiation pressure is a result of the transfer of momentum from
photons of light to the surface of the satellite. The result of this pressure across
the satellite surface is a force that acts through the center of pressure, , of the
satellite. In most cases, the center of pressure is not co-onside with the center of
mass of the satellite, thus a torque will be generated around the center of
mass see Figure ( 2-12). For Earth-orbiting satellite, where the distance from
the satellite to the Earth is small compared to the Earth-Sun distance, the mean
solar flux acting on the satellite is considered a constant (regardless of orbital
radius or position).
psc
cm
The solar radiation torque is calculated using the following equation
[Error! Reference source not found. .
( 2.5) )()cos()1( gpssSp cciqAc
SoT −⋅⋅+⋅⋅=
Where
So is solar constant [W/m² = 1428 W/m² (max)
c is speed of light [m/s = 3*108 m/s
A is the cross sectional area subjected to solar radiation pressure [m²
q is reflectance factor (0: perfectly absorbing, 1: perfectly reflecting)
si is the angle of sun light incidence [rad
cps is the center of pressure [m
cg is the center of gravity [m
Referring to the previous assumptions, the solar pressure disturbance
torque is the only one that is not dependent of the orbit altitude. However, it is
dependent of the sun incidence angle i. The worst case torque arises at i = 0°.
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
2.6.4 Aerodynamic Disturbance
Aerodynamic torques are due to atmospheric drag acting on the satellite
as shown in Figure ( 2-12. Aerodynamic torques can be quite significant,
especially at low altitudes (less than 500). At higher altitudes the aerodynamic
torque is almost negligible. These torques is difficult to be calculate because
changing of some parameters, such as cross sectional area of satellite subjected
to the aerodynamic drag during tilting. In addition, atmospheric density varies
significantly with solar activity. The generated torque due to aerodynamic
effects is calculated by ( 2.6) .
( )gpaCDad ccvAcT −⋅⋅⋅⋅⋅= 2
21 ρ ( 2.6)
Where
ρ is the density [kg/m³
cD is the coefficient of drag
A is the cross sectional area subjected to atmospheric drag [m²
vc is the orbital velocity [m/s
cps is the center of pressure [m
cg is the center of gravity [m
Figure ( 2-12) Sunlight and drag effect
2.7 Attitude Control techniques
There are different techniques to apply control torque for disturbance
compensation and to maintain the required orientation . For these purposes, two
types of control techniques are often employed , passive and active control
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
Error! Reference source not found. Error! Reference source not found. .
Since Attitude control system, is highly mission dependent, so the decision to
use a passive or an active control technique or a combination of them depends
on mission pointing and stabilization requirements.
2.7.1 Passive Control
For missions with rather coarse orientation requirements, passive control
techniques are used for attitude control. The main advantageous of these
techniques are saving resources concerning both mass and power and the
associated cost. In addition, they provide longer lifetime for the space mission.
However, a poor pointing accuracy is obtained. The most common passive
control techniques are passive magnetic system (i.e. Permanent magnate),
gravity gradient and spin stabilization Error! Reference source not found. .
2.7.1.1 Passive magnetic
In this method, the concept of magnetic compass is applied, that is, the
satellite is equipped with permanent magnet that will keep the alignment
between certain axis of the satellite with geomagnetic field vector .As a result,
the south pole of the magnet will be drawn towards the magnetic north pole of
the Earth, and vice versa. This will lead to a slight tumbling motion with two
revolutions per orbit and no possibilities of controlling spin around the magnets
axis as shown in Figure ( 2-13) so continues nadir pointing will not be possible.
Permanent magnet technique is used in AZUR-1 Error! Reference source not
found. .
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
Figure ( 2-13) passive magnetic control orientation profile.
2.7.1.2 Gravity-gradient stability
Gravity-gradient stability uses the mass characteristics of the satellite to
maintain the nadir pointing towards Earth (as described in 2.6.1). The
magnitude of gravity-gradient torque decreases with the cube of the orbit
radius, and symmetric around the nadir vector, thus not influencing the yaw of
satellite. Therefore, the gravity gradient stability is used in simple satellite in
LEO without yaw orientation requirements Error! Reference source not
found. .
Yet, stability in the gravity gradient case depends upon the the
configuration of the mass characteristics of the space craft. The following
condition is necessary for gravity-gradient stability [Error! Reference source
not found. : JzzJxxJyy & Jzz Jxx Jyy +<>> ( 2.7)
Where Jii :is the moment of inertia tensor for the satellite in i axis.(in
body coordinate system) (i=x,y,z)
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
As a result, the gravity gradient stability can be achieved by
manipulation of lay out of the satellite's components to grantee the above
mentioned condition ( 2.7). Other solution is to add a sufficient mass on a
deployed boom to reach the stability condition. This will increase the moment
of inertia in the directions transverse to the boom, and the satellite will be
stable with the mass pointed toward or away from the earth. Gravity gradient
stability is suffering from continuous oscillation about nadir due to lack of
damping. Hence, gravity-gradient stabilization should be supported with
damping system to reduce the small oscillation around the nadir vector.
Gravity-gradient stabilization technique is used in DODGE, GEOS-3, and
RAE-2 Error! Reference source not found. .
2.7.1.3 Spin stabilization
Spin stabilization technique applies the gyroscopic stability to passively
resist the effect of disturbance torques about the spinning axis. Spin-stabilized
satellites spins about their major or minor axes, so angular momentum vector
remains approximately fixed with respect to inertial space. [Error! Reference
source not found. . Spinning satellite is classified according to spinning object
to single or dual spin. The stability criteria and the corresponding spinning axis
is predicted according to the following analysis.
2.7.1.3.1. Single Spin
In single spin satellites, the whole satellite spins about the angular
momentum vector as shown in Figure ( 2-14) This method of stabilization is
simple and has a high reliability. The cost is generally low, and it has a long
system life. However, Spin-stabilized satellite are subject to nutation and
precession, but have a gyroscopic resistance which provides stability about the
transverse axis.
On the other side, spinning satellite will have poor maneuverability.
Beside, it will not be suitable for systems that need to be Earth pointing, such
as payload scanners and communication antennas. Single spin stabilization
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
technique is used in AEROS-I,2, ALOUETIE-I,2and ARIEL-I Error!
Reference source not found. .
Figure ( 2-14) spin stabilization
2.7.1.3.2. Dual Spin
In satellite with dual spin, a major portion of the satellite is spun, while
the payload section is despun. This technique is favorable because fixed inertial
orientation is possible on the despun portion. This method of stabilization has a
few disadvantages, however. This system is much more complex, which leads
to an increase in cost and a decrease in reliability. In addition, the stability is
sensitive to mass imbalances. Duel spin stabilization technique is used in ANS,
ATS-6, SEASAT and SMM Error! Reference source not found. .
2.7.2 Active control techniques
For complex mission requirements, satellite requires continues
autonomous control about the three axes during the mission. In general, active
control systems employ momentum exchange wheels, magnetic control
devices, and thrusters. Advantages of these systems are high pointing accuracy,
and a not constrained to inertial pointing like spin stabilization technique.
However, the hardware is often expensive, and complicated, leading to a higher
weight and power consumption.
By Ahmad Farrag 2011 [email protected]

Chapter 2 ALEXSAT
By Ahmad Farrag 2011 [email protected]
2.7.2.1 Momentum exchange Wheels
Three-axis stabilization through momentum exchange wheels applies
reaction wheels, momentum wheels, and control moment gyros. This is to
provide three axis stabilization. Advantages and disadvantages of this wheel
system are discussed in 2.5.2.1. Three-axis stabilization technique using wheels
is used in Egyptsat1, FLTSATCOM, MAGSAT and SEASAT Error!
Reference source not found. .
2.7.2.2 Magnetic actuators
Magnetic actuators devices use the interaction of the satellite magnetic
dipole moment and the Earth’s magnetic field to provide a control torque.
Magnetic control torques work better in low Earth orbits than higher orbits,
such as geostationary, because as the distance from the Earth increases, the
geomagnetic strength decreases. Advantage and disadvantage of magnetic
actuators is discussed in 2.5.2.2 Three-axis stabilization technique using
magnetic actuators is used in Egyptsat1, MAGSAT, TIROS-IX, LANDSAT-D
and AEROS-1, 2Error! Reference source not found. .
2.7.2.3 Thrusters
Mass propulsive devices, such as thrusters, can be used for three-axis
stabilization. These often consist of six or more thrusters located on the satellite
body. The strength of the obtainable torque is dependent on the thrust level as
well as the torque-arm length about the axis of rotation. Advantage and
disadvantage of thrusters is discussed in 2.5.2.3 2.5.2.2. Three axis stabilization
technique using thrusters is used in ATS-3,6 , FLTSATCOM, GOES-I,
SKYNETError! Reference source not found. .


















