A Prototype System for 3D Dynamic Face Data Collection by Synchronized Cameras
22
A Prototype System for 3D Dynamic Face Data Collection by Synchronized Cameras Yuxiao Hu Hao Tang
-
Upload
connor-finch -
Category
Documents
-
view
39 -
download
0
description
A Prototype System for 3D Dynamic Face Data Collection by Synchronized Cameras. Yuxiao Hu Hao Tang. Problem Statement. Collect multi-view face video with expressions; Potential researches Co-articulation of facial expression and lip movement: - PowerPoint PPT Presentation
Transcript of A Prototype System for 3D Dynamic Face Data Collection by Synchronized Cameras

A Prototype System for 3D Dynamic Face Data Collection by Synchronized Cameras
Yuxiao Hu
Hao Tang

Problem Statement
Collect multi-view face video with expressions; Potential researches
Co-articulation of facial expression and lip movement: Non-frontal view audio/visual speech recognition-lip
reading

Relevant Works
Static 2D face databases: FERET, CMU PIE, ORL, Yale Database, UMIST, etc
Static 3D face databases: 3D-RMA, GavabDB, YorkDB, XM2VTS database, FRGC database,etc
3D Dynamic face databases: CMU FIA, no markers, no audio Intel Research China Database, not synchronized

Highlights
Total Solution: Both hardware and software MultiView+Synchronization+RealTime Flexibility: Flexibly extended from 2 cameras to 5 ca
meras; Supplementary Tools:
camera calibration, color space conversion, 2D facial feature tracking 3D face shape recovery
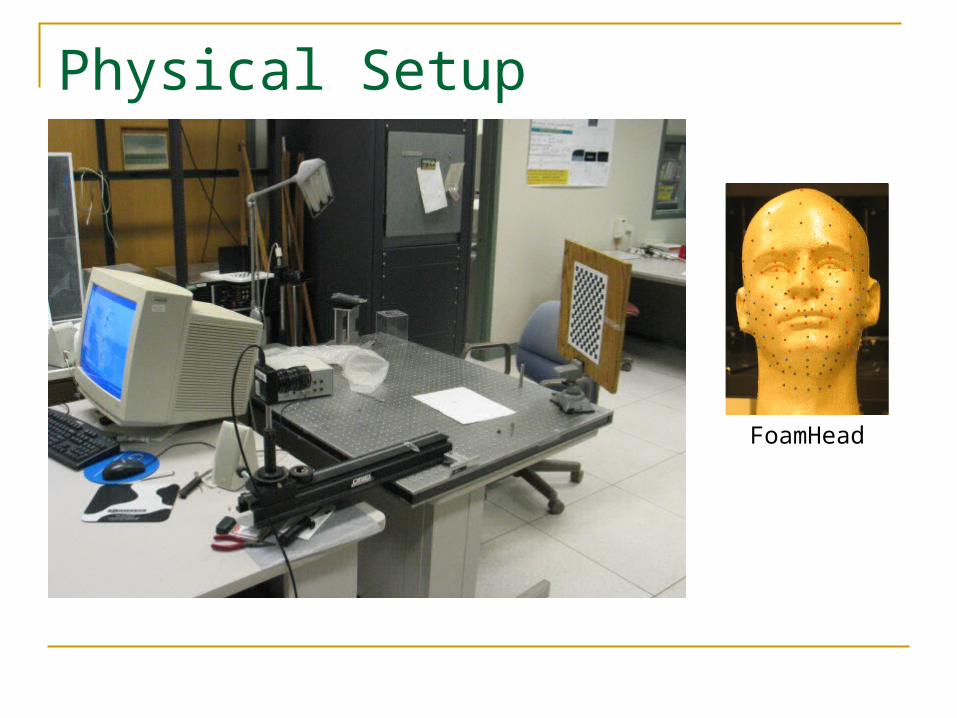
Physical Setup
FoamHead

System Diagram
Camera Calibration
Video Data Capture
Color De-mosaicing
Facial Feature Tracking
3D Shape Reconstruction

Synchronization-Hardware Configuration
DragonFly Camera
Y
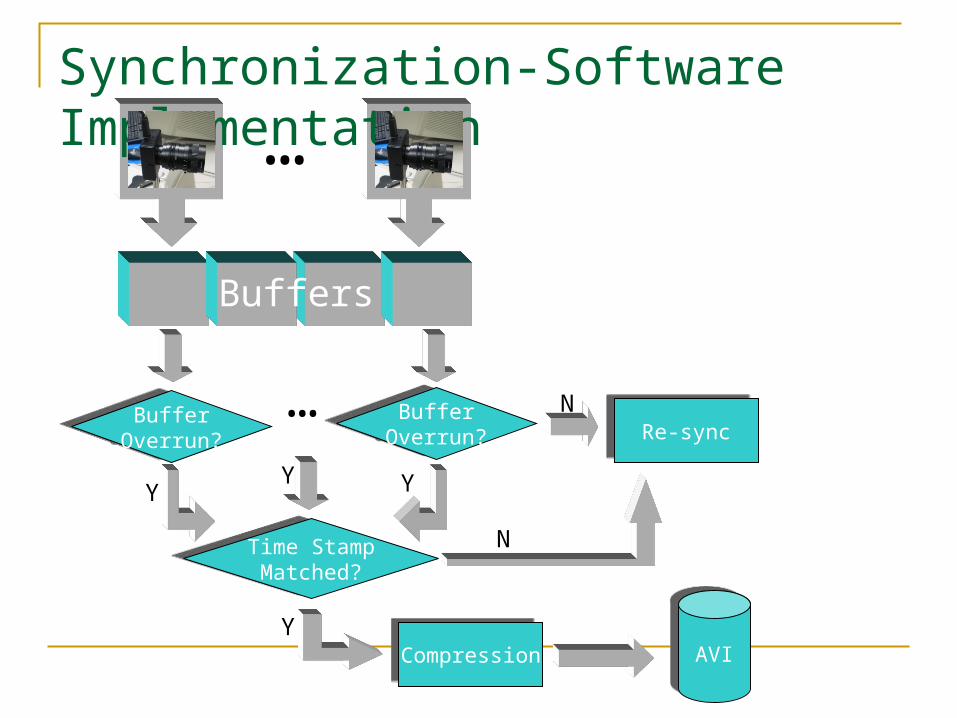
Synchronization-Software Implementation…
Buffers
BufferOverrun?
BufferOverrun?
BufferOverrun?
BufferOverrun?
Time StampMatched?Time StampMatched?
…Y Y
Y
N
NRe-syncRe-sync
CompressionCompression AVIAVI

Offline Color De-mosaic
Raw Data: Color represented in Sparse (Stippled) Pattern
Reconstructed RGBcolor image
Raw Data Reconstructed RGBcolor video
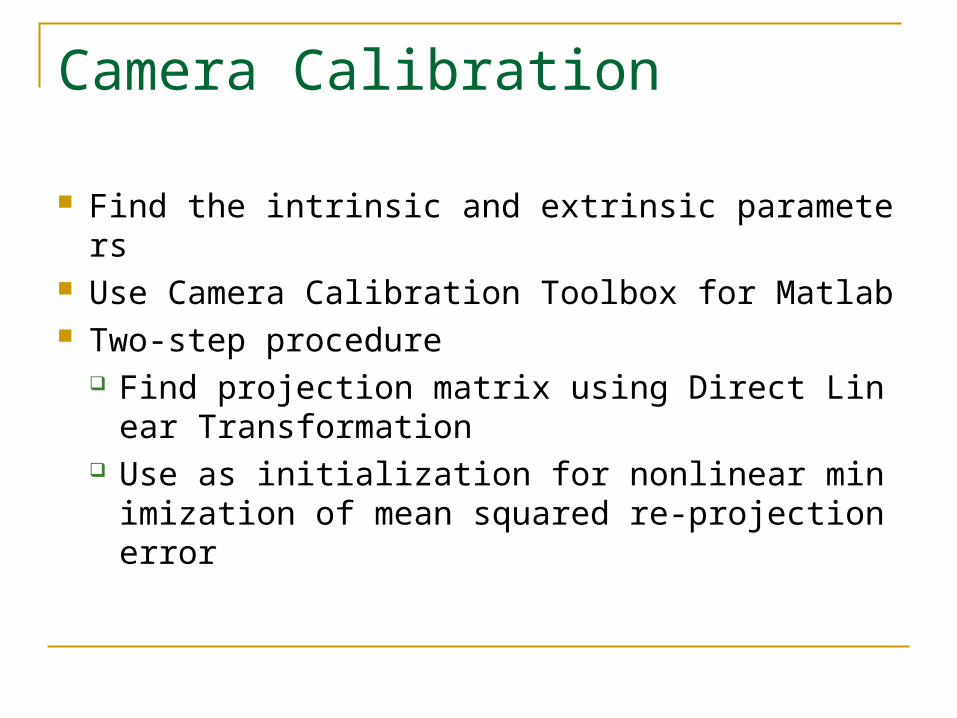
Camera Calibration
Find the intrinsic and extrinsic parameters Use Camera Calibration Toolbox for Matlab Two-step procedure
Find projection matrix using Direct Linear Transformation
Use as initialization for nonlinear minimization of mean squared re-projection error

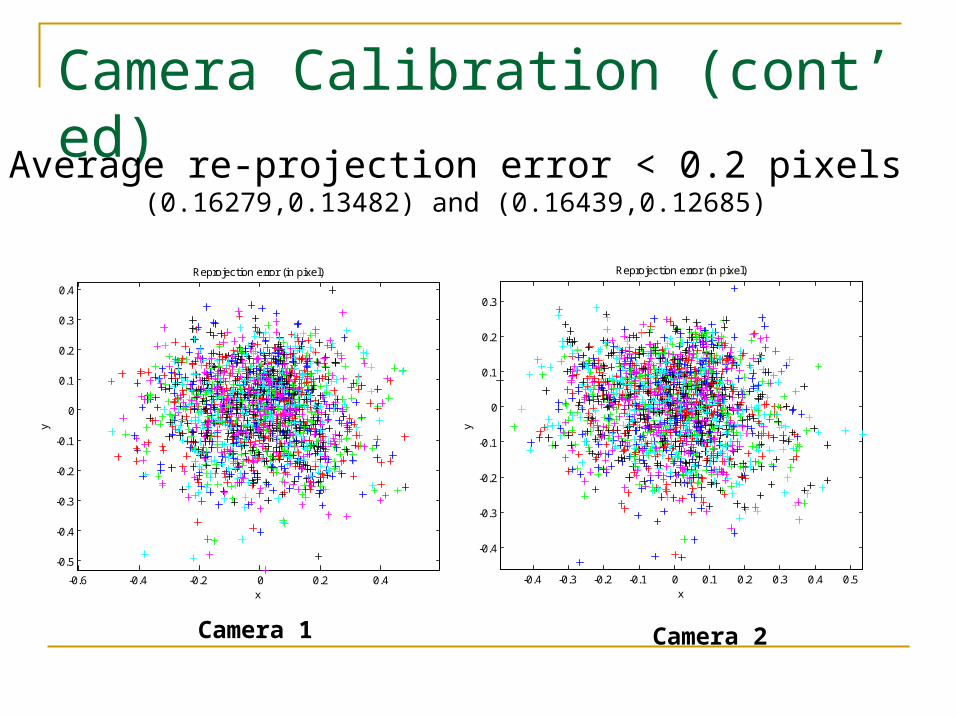
Camera Calibration (cont’ed)
Camera 1 Camera 2
Camera 1
Camera 2

Camera Calibration (cont’ed)

Camera Calibration (cont’ed)
Camera 1
Camera Calibration (cont’ed)
-0.6 -0.4 -0.2 0 0.2 0.4
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Reprojection error (in pixel)
x
y
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Reprojection error (in pixel)
x
y
Camera 1 Camera 2
Average re-projection error < 0.2 pixels(0.16279,0.13482) and (0.16439,0.12685)

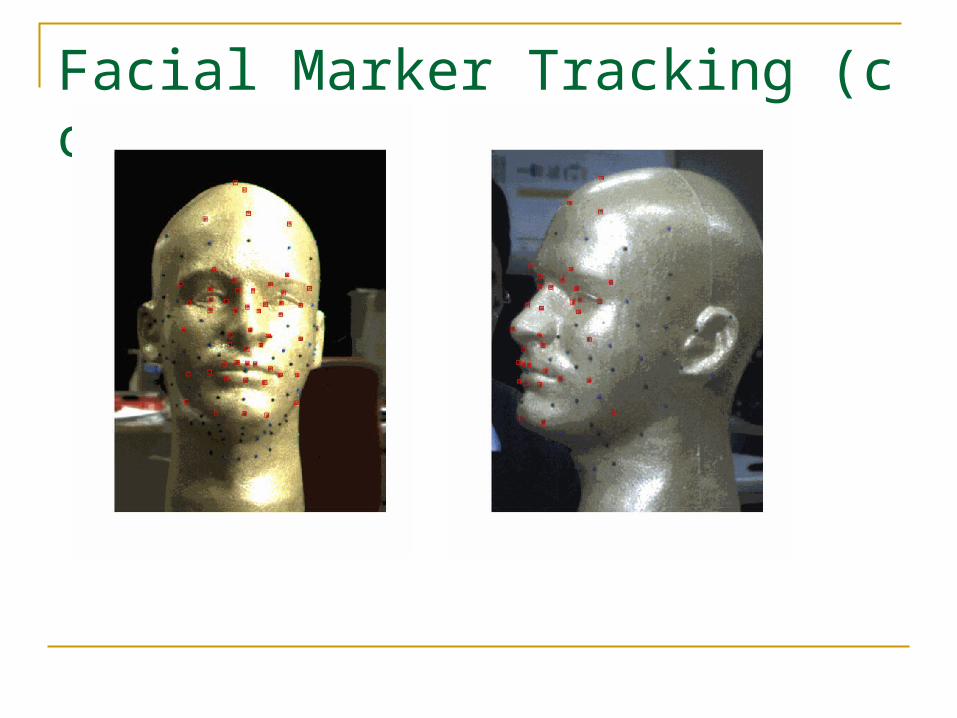
Facial Marker Tracking
Simple but effective tracking algorithm

Facial Marker Tracking (cont’ed) Statistical marker collocation model

Facial Marker Tracking (cont’ed)
Facial Marker Tracking (cont’ed)

3D Reconstruction: Stereo Triangulation A bit of theory

3D Reconstruction: Stereo Triangulation (cont’ed)
Deliveries
The data acquisition system of camera array Tools for Color De-mosaicing The calibration data and tools Some sample data result 3D ground truth data and labeling tool Technical Report

Outline (4Ws+2Hs)
Why (do we do this?) Who (has done the related work?) What (we proposed to do?) How (did we achieve our goal?) Why (we need to do so?) How (we evaluate our work?)