6 Confidence measures for object detection6 Confidence measures for object detection Portions of...
21
6 Confidence measures for object detection Portions of this chapter were previously presented at the 20 th Australian Joint Confer- ence on Artificial Intelligence (Horton et al., 2007). As discussed in section 2.6 and fig. 2.4, a Haar Classifier Cascade tests whether an image region represents an object as follows: 1. A cascade steps through several stages in turn; it stops and returns false if a stage returns false. If all stages return true, the cascade returns true. 2. A stage returns true if the sum of its feature outputs exceeds a chosen threshold. 3. A feature returns the sum of its rectangle outputs. 4. A rectangle returns the sum of pixel values in the image region bounded by that rectangle, multiplied by a chosen weight. While the Haar Classification output is binary, its intermediate values are numeric and continuous. This suggests that the stages could derive a confidence measurement from the features, and the cascade could combine the stage confidences to return an overall confidence measurement. This has similarities to the stacking experiments men- tioned in section 2.3.3, which showed stacking only effectively combines classifier output when that output contains class probability distributions. The confidence measurement also amounts to measuring the margin of a boosted classifier, as in section 2.3.4.1. The method proposed and implemented here returns the confidence for a region by modifying the first two steps as described below. The modifications are illustrated in fig. 6.1; this may be compared to the illustration of the binary process in fig. 2.4. 1. A cascade steps through several stages, adding up their outputs; it stops if any stage returns negative. If all stages are non-negative, the confidence returned is this cumu- lative sum; if not, it returns false. 2. A stage returns the sum of its feature outputs minus its threshold. 84
Transcript of 6 Confidence measures for object detection6 Confidence measures for object detection Portions of...

6 Confidence measures for object
detection
Portions of this chapter were previously presented at the 20th Australian Joint Confer-
ence on Artificial Intelligence (Horton et al., 2007).
As discussed in section 2.6 and fig. 2.4, a Haar Classifier Cascade tests whether an
image region represents an object as follows:
1. A cascade steps through several stages in turn; it stops and returns false if a stage
returns false. If all stages return true, the cascade returns true.
2. A stage returns true if the sum of its feature outputs exceeds a chosen threshold.
3. A feature returns the sum of its rectangle outputs.
4. A rectangle returns the sum of pixel values in the image region bounded by that
rectangle, multiplied by a chosen weight.
While the Haar Classification output is binary, its intermediate values are numeric
and continuous. This suggests that the stages could derive a confidence measurement
from the features, and the cascade could combine the stage confidences to return an
overall confidence measurement. This has similarities to the stacking experiments men-
tioned in section 2.3.3, which showed stacking only effectively combines classifier output
when that output contains class probability distributions. The confidence measurement
also amounts to measuring the margin of a boosted classifier, as in section 2.3.4.1.
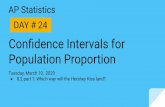
The method proposed and implemented here returns the confidence for a region by
modifying the first two steps as described below. The modifications are illustrated in
fig. 6.1; this may be compared to the illustration of the binary process in fig. 2.4.
1. A cascade steps through several stages, adding up their outputs; it stops if any stage
returns negative. If all stages are non-negative, the confidence returned is this cumu-
lative sum; if not, it returns false.
2. A stage returns the sum of its feature outputs minus its threshold.
84

Chapter 6 Confidence measures for object detection 85
Figure 6.1: Haar Classifier Cascade confidence measurement process
6.1 Uses
The confidence measurement described above derives more information from a cascade
than the binary classification does. This information may lead to more accurate object
detection. Two potential ways to use this information are proposed here: hill-climbing
to maximise the confidence of the regions found by binary detection and measuring
confidence across an entire image to build a ‘confidence map’.
6.1.1 Hill-climbing
Here, regular binary detection finds potential object regions in the image. The hill-
climbing routine then measures the confidence of all regions with similar scales and
positions. The highest-confidence region is selected and the process repeats until no
nearby region has higher confidence than the currently chosen one. The number of
hill-climbing steps affects running time, so steps are listed in section 6.4.7.
The scale and position adjustments implemented here for a w×h pixel region cover
the 9 scale adjustments from 1.05−4 to 1.054 and the 81 position adjustments from
−w4 ,−h
4 pixels to +w4 , +h
4 pixels.
6.1.2 Confidence mapping
If the cascade confidence is measured across the image for a variety of region sizes, it
is possible to build a ‘confidence map’ of the image. This will illustrate the confidence
that there is an object centred upon each point in the image, along with information
about sizes and (if necessary) orientations.

Chapter 6 Confidence measures for object detection 86
6.1.2.1 Merging confidences
As with binary detection, confidence mapped detections form clusters around each ob-
ject in the image and should be combined in a manner similar to the near neighbour
merging described in section 2.6.6. The chosen method finds similarly-placed confi-
dence measurements and sums their confidence; the location and scale of the summed
confidence is the location and scale of the local maximum of the original confidence
measurements. The definition of ‘similarly-placed confidence’ is as follows:
If some detection E is sufficiently close to a higher-confidence detection D such
that, if D were a positive annotation instead of a detection, E would be considered a
successful detection of D, Econfidence is added to Dconfidence and E is discarded.
Under the OpenCV defaults described in section 2.7.2, this means a face or fish
detection D will gain all lower-confidence detections centred within 3×Dsize10 pixels and
sized between 23Dsize and 3
2Dsize. For seahorse segments the similarity measure in
section 4.3.1 is used instead.
The results in section 6.4.1 show why this form of merging was used.
If a binary classification is required, a confidence threshold can be chosen, based on
its trade-off between true positives and false positives. ROC curves may be created by
varying this threshold from 0 to∞. Figures in appendix C such as C.2(e), C.2(f), C.5(e)
and C.5(f) show detection rectangles with their confidences; false positives among them
may be excluded by selecting an appropriately high threshold.
6.1.2.2 Multiple cascades
Even if confidence maps improve the accuracy of single cascades, they may not effec-
tively combine the output of multiple cascades. The confidence sum described above
will combine the confidences returned by each of the cascades used, which assumes
that the stage thresholds, and therefore the final confidence measurements, are compa-
rable. The cascade training process does not guarantee this property, because binary
cascades don’t require it. If this becomes a problem confidence mapping may be run
on the training images to find the minimum, average or maximum confidences returned
by each cascade. Confidence results at classification time may then be divided by those
amounts as a crude form of normalisation.

Chapter 6 Confidence measures for object detection 87
6.2 Stage variations
Cascade confidence measurement offers some intriguing possibilities in modifying the
cascade before running it, or in running multiple variations of the cascade and com-
bining their results. Two such modifications are considered here: accepting some stage
failures, and running virtual attribute subsetting to gain multiple classifications from
a single cascade.
6.2.1 Stage failure tolerance
As implemented, the confidence measurement still halts if any stage returns false.
It is possible, however, to merely accept one or more stage ‘failures’, add the stage
result (which will be negative) to the cumulative confidence measurement, and continue
running to the next stage of the cascade. This may yield a more robust result, as it
prevents any individual badly-trained stages from preventing positive detections.
6.2.2 Virtual attribute subsetting
With confidence mapping it is also possible to create multiple copies of the existing
cascade, remove a subset of stages from each copy, run all the copies and combine the
results. This is analogous to virtual attribute subsetting, as described in chapter 3.
Note that where ‘attribute’ is normally synonymous with ‘feature’, here each ‘attribute’
considered by the subset generator is one stage of the cascade. The process is still
‘virtual’ in the sense that it takes a single trained classifier and manipulates it at
classification time to obtain multiple classifications.
Each test of virtual attribute subsetting here uses 10 subsets, with selection by
the ‘both balanced subsets’ algorithm as suggested by section 3.4. Although the best
attribute (stage) proportion is expected to be in the 0.8..0.9 range, 0.7 will also be
tested. The local maximum and sum operation will combine the confidences from each
stage subset run, just as it combines confidences from multiple independent cascades
in section 6.1.2.2.

Chapter 6 Confidence measures for object detection 88
6.2.3 Computation costs
Both of these variations will increase running time. Accepting some stage failures will
increase computation time, as tests continue on regions that would previously have
been rejected by early stages. Also, while virtual attribute subsetting has no effect on
training time, it multiplies classification time by the number of subsets.
6.3 Cascade selection
The confidence measurement may be made from any Haar Classifier Cascade; there
is no need to train the cascade with confidence hill-climbing or confidence mapping
in mind. Therefore, as explained in section 4.1.1, the existing OpenCV sample cas-
cade haarcascade frontalface alt2 was used for face detection. It has 20 stages and its
window size is 20× 20 units.
For fish and seahorse detection, the cascades trained in chapter 5 were used again.
Cascades used for confidence-based object detection might benefit from different prop-
erties from those used to make binary object classifications, so the cascades trained
with different random angle ranges were tested and compared. The images or cascades
were always rotated in 15◦ steps, in accordance with the results in section 5.4.5.
6.4 Results
ROC curves were once again constructed in pairs to show the best random angle range
in each case, as were made for binary object detection; this is explained in section 5.4.
This section contains only summary curves constructed using the best results from each
test; the individual curves are shown in appendix B. Example images with detections
are included in appendix C.
6.4.1 Confidence mapping merge comparison
The reasons for confidence mapping taking local maxima and adding nearby confidences
are shown for faces in fig. 6.2 and for fish in fig. 6.3. When all confidence regions were
returned, performance was poor. Returning only local maxima improved accuracy, and
adding neighbouring detection confidences improved it further.

Chapter 6 Confidence measures for object detection 89
255
319
383
447
511
0 100 200 300 400 500False positives
Tru
e p
os
itiv
es
0.5
0.6
0.7
0.8
0.9
1
Tru
e p
os
itiv
e r
ate
Local maxima, summing neighboursLocal maximaAll confidences
Figure 6.2: ROC curves for face detection by confidence mapping, varying local maxi-
mum usage
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Local maxima, summing neighboursLocal maximaAll confidences
(a) Rotated images
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Local maxima, summing neighboursLocal maximaAll confidences
(b) Rotated cascades
Figure 6.3: ROC curves for fish detection by confidence mapping, varying local maxi-
mum usage

Chapter 6 Confidence measures for object detection 90
6.4.2 Normalising confidence maps from multiple cascades
There was some small variation between the confidences returned by the different fish
cascades; these are shown in table 6.1 and plotted in fig. 6.4. Normalising by these
values had an insignificant effect upon accuracy, as shown by the overlapping lines in
fig. 6.5. Normalisation was therefore not used in the experiments that follow.
Table 6.1: Confidence returned by rotated fish cascades on training images
Fig. 6.4 is a graph of these confidences.
0
10
20
30
40
50
60
70
45° 30° 15° 0° -15° -30° -45°
Cascade angle
Co
nfi
de
nc
e
Max
90th percentile
MeanMedian
Min
10th percentile
Figure 6.4: Graph of rotated fish cascade confidences

Chapter 6 Confidence measures for object detection 91
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
No normalisationNormalised by meanNormalised by minimumNormalised by 10th percentileNormalized by medianNormalised by 90th percentileNormalised by maximum
Figure 6.5: ROC Curves for fish detection by rotated cascade confidence mapping,
varying normalisation

Chapter 6 Confidence measures for object detection 92
6.4.3 Stage failure tolerance
Allowing one stage failure of the 20 in each cascade consistently improved the accuracy
of confidence mapped fish detection, both for rotated images (fig. 6.7(a)) and rotated
cascades (fig. 6.7(a)). It was not as useful for face detection (fig. 6.6) or seahorse
segment detection (figs. 6.8(b), 6.8(d)). Allowing more than one stage failure did not
cause further improvements, and often reduced accuracy.
The confidence mapping used in section 6.4.5 tolerated no stage failures for face
and seahorse detection, and used failure tolerance of 1 for fish detection.
255
319
383
447
511
0 100 200 300 400 500False positives
Tru
e p
os
itiv
es
0.5
0.6
0.7
0.8
0.9
1
Tru
e p
os
itiv
e r
ate
Standard confidence mappingFailure tolerance=1Failure tolerance=2Failure tolerance=3
Figure 6.6: ROC curves for face detection by confidence mapping, varying the number
of stage failures permitted

Chapter 6 Confidence measures for object detection 93
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Standard confidence mappingFailure tolerance=1Failure tolerance=2Failure tolerance=3
(a) Rotated images
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Standard confidence mappingFailure tolerance=1Failure tolerance=2Failure tolerance=3
(b) Rotated cascades
Figure 6.7: ROC curves for fish detection by confidence mapping, varying the number
of stage failures permitted

Chapter 6 Confidence measures for object detection 94
0
200
400
600
800
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Standard confidence mapping
Failure tolerance=1
(a) Rotated images, seahorse heads
0
200
400
600
800
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Standard confidence mapping
Failure tolerance=1
(b) Rotated cascades, seahorse heads
0
200
400
600
800
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Standard confidence mapping
Failure tolerance=1
(c) Rotated images, seahorse bodies
0
200
400
600
800
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Standard confidence mapping
Failure tolerance=1
(d) Rotated cascades, seahorse bodies
Figure 6.8: ROC curves for seahorse segment detection by confidence mapping, varying
the number of stage failures permitted

Chapter 6 Confidence measures for object detection 95
6.4.4 Virtual attribute subsetting
The attribute proportions tested had little effect on virtual attribute subsetting ac-
curacy, as shown for face detection in fig. 6.9(a), fish detection on rotated images in
fig. 6.10(a) and fish detection by rotated cascades in fig. 6.10(c). It improved upon sim-
ple confidence mapping for faces, where it nearly reached its maximum true positive
count while creating less than 100 false positives, as shown in fig. 6.9(b). It was slightly
inferior to simple confidence mapping for fish detection on rotated images (fig. 6.10(b)),
but improved fish detection by rotated cascades (fig. 6.10(d)). This may be seen, along
with comparisons to permitting one stage failure, in figs. 6.10(b) and 6.10(d).
Seahorse segment detection by virtual attribute subsetting was not tested due to
time constraints; seahorse detection with its two cascades and larger set of angles was
already much slower than fish detection, and virtual attribute subsetting has a large
time penalty, as predicted in section 6.2.3 and confirmed in section 6.4.8.
383
447
511
0 100 200 300 400 500False positives
Tru
e p
os
itiv
es
0.75
0.875
1
Tru
e p
os
itiv
e r
ate
p=0.9p=0.8p=0.7
(a) Varying attribute proportion
383
447
511
0 100 200 300 400 500False positives
Tru
e p
os
itiv
es
0.75
0.875
1
Tru
e p
os
itiv
e r
ate
Failure tolerance=1
Virtual Attribute Subsetting, p=0.8
Standard confidence mapping
(b) Method comparison
Figure 6.9: ROC curves for face detection using confidence mapping and virtual at-
tribute subsetting

Chapter 6 Confidence measures for object detection 96
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
p=0.9p=0.8p=0.7
(a) Rotated images, varying attribute proportion
0
100
200
300
400
500
0 200 400 600 800
False positivesT
rue
po
sit
ive
s
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Failure tolerance=1Virtual attribute subsetting, p=0.9Standard confidence mapping
(b) Rotated images, method comparison
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
p=0.9p=0.8p=0.7
(c) Rotated cascades, varying attribute propor-
tion
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Failure tolerance=1Virtual Attribute Subsetting, p=0.7Standard confidence mapping
(d) Rotated cascades, method comparison
Figure 6.10: ROC curves for fish detection using confidence mapping and virtual at-
tribute subsetting

Chapter 6 Confidence measures for object detection 97
6.4.5 Method comparison
Both confidence-based detection methods were generally better than simple binary ob-
ject detection. Confidence mapping was almost always the better of the two, although
for face detection they were equal for low false positive counts, as seen in fig. 6.11;
table A.1 in appendix A contains the original true and false positive counts.
For the rotated object detection confidence mapping was also usually better than
hill-climbing, which was in turn mostly better than binary detection. This is plotted
for fish detection in fig. 6.12 and for seahorse segment detection in fig. 6.13. Despite
the concerns raised in section 6.1.2.2, confidence mapping with multiple rotated cas-
cades showed large improvements, as shown for fish detection in fig. 6.12(b), seahorse
head detection in fig. 6.13(b) and seahorse body detection in fig. 6.13(d). However,
fig. 6.12(b) also contains the only case found where confidence mapping is inferior: for
very low (< 10) false positive counts, binary detection is more accurate.
255
319
383
447
511
0 100 200 300 400 500False positives
Tru
e p
os
itiv
es
0.5
0.6
0.7
0.8
0.9
1
Tru
e p
os
itiv
e r
ate
Confidence mappingBinary with hill-climbingBinary
Figure 6.11: ROC curves for face detection using binary detection, binary detection
followed by hill-climbing, and confidence mapping

Chapter 6 Confidence measures for object detection 98
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Confidence mappingBinary with hill-climbingBinary
(a) Rotated images
0
100
200
300
400
500
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Confidence mappingBinary with hill-climbingBinary
(b) Rotated cascades
Figure 6.12: ROC curves for fish detection using binary detection, binary detection
followed by hill-climbing, and confidence mapping

Chapter 6 Confidence measures for object detection 99
0
200
400
600
800
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Confidence mappingBinary with hill-climbingBinary
(a) Rotated images, seahorse heads
0
200
400
600
800
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Confidence mappingBinary with hill-climbingBinary
(b) Rotated cascades, seahorse heads
0
200
400
600
800
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Confidence mappingBinary with hill-climbingBinary
(c) Rotated images, seahorse bodies
0
200
400
600
800
0 200 400 600 800
False positives
Tru
e p
os
itiv
es
0
0.2
0.4
0.6
0.8
1
Tru
e p
os
itiv
e r
ate
Confidence mappingBinary with hill-climbingBinary
(d) Rotated cascades, seahorse bodies
Figure 6.13: ROC curves for seahorse segment detection using binary detection, binary
detection followed by hill-climbing, and confidence mapping

Chapter 6 Confidence measures for object detection 100
6.4.6 Angle ranges
As mentioned above, the graphs plotting ROC curves for individual random angle
ranges are listed in appendix B.
The results for hill-climbing on each image set closely match the binary cascade
results for each image set. The connections are listed in table 6.2.
The individual confidence mapping ROC curves are much closer together. This
shows that confidence mapping is more robust than binary detection if the cascade
random angle ranges are not optimal. The best angle ranges found and their relation-
ships to binary detection angle ranges are listed in table 6.3.
Table 6.2: ROC curve figure numbers for binary detections and their corresponding
hill-climbing curves, including the selected ‘best’ angles
Image set Rotated Binary Angle Hill-climbed Angle
Fish images 5.14(a)/5.14(b) 30◦ B.1(a)/B.1(b) 30◦
Fish cascades 5.15(a)/5.15(b) 25◦ B.2(a)/B.2(b) 20◦
Seahorse heads images 5.16(a)/5.16(b) 5◦ B.5(a)/B.5(b) 5◦
Seahorse bodies images 5.17(a)/5.17(b) 15◦ B.5(c)/B.5(d) 10◦
Seahorse heads cascades 5.18(a)/5.18(b) 10◦ B.7(a)/B.7(b) 20◦
Seahorse bodies cascades 5.19(a)/5.19(b) 10◦ B.7(c)/B.7(d) 10◦
Table 6.3: ROC curve figure numbers for binary detections and their corresponding
confidence mapping curves, including the selected ‘best’ angles
Image set Rotated Binary Angle Confidence-mapped Angle
Fish images 5.14(a)/5.14(b) 30◦ B.3(a)/B.3(b) 30◦
Fish cascades 5.15(a)/5.15(b) 25◦ B.4(a)/B.4(b) 15◦
Seahorse heads images 5.16(a)/5.16(b) 5◦ B.6(a)/B.6(b) 20◦
Seahorse bodies images 5.17(a)/5.17(b) 15◦ B.6(c)/B.6(d) 15◦
Seahorse heads cascades 5.18(a)/5.18(b) 10◦ B.8(a)/B.8(b) 35◦
Seahorse bodies cascades 5.19(a)/5.19(b) 10◦ B.8(c)/B.8(d) 10◦

Chapter 6 Confidence measures for object detection 101
6.4.7 Hill-climbing steps
Few hill-climbing steps were needed in most cases. Half of the detections made only
needed two hill-climbing step to maximise confidence, and none needed more than 9.
Fig. 6.14(a) shows that the object to detect had little effect upon the number of hill-
climbing steps made. Increasing random angle ranges in the positive training sets very
slightly increased the number of steps for all of the fish (fig. 6.14(b)), seahorse heads
(fig. 6.14(c)) and seahorse bodies (fig. 6.14(d)) detected. The mean number of steps
made consistently fell between 2.4 and 2.8, as seen in table 6.4.
0
0.1
0.2
0.3
0.4
0.5
0.6
1 2 3 4 5 6 7 8 9 10
Hill-climbing steps
Pro
po
rtio
na
l fr
eq
ue
nc
y
Faces
Fish
Seahorse bodies
Seahorse heads
(a) All objects, random angle range=15◦
0
0.1
0.2
0.3
0.4
0.5
0.6
1 2 3 4 5 6 7 8 9 10
Hill-climbing steps
Pro
po
rtio
na
l fr
eq
ue
nc
y
Range=0°
Range=15°
Range=45°
(b) Fish detection
0
0.1
0.2
0.3
0.4
0.5
0.6
1 2 3 4 5 6 7 8 9 10
Hill-climbing steps
Pro
po
rtio
na
l fr
eq
ue
nc
y
Range=0°
Range=15°
Range=45°
(c) Seahorse head detection
0
0.1
0.2
0.3
0.4
0.5
0.6
1 2 3 4 5 6 7 8 9 10
Hill-climbing steps
Pro
po
rtio
na
l fr
eq
ue
nc
y
Range=0°
Range=15°
Range=45°
(d) Seahorse body detection
Figure 6.14: Frequency of hill-climbing steps made during object detection
Proportional frequency is the proportion of all hill-climbs ending after each step.

Chapter 6 Confidence measures for object detection 102
Table 6.4: Summary of hill-climbing steps carried out during object detection
6.4.8 Classification time
To compare the time needed for classification, each of the methods considered in this
chapter was run 5 times on the 130 images in the face detection dataset. These times are
shown in table 6.5 and plotted in fig. 6.15. The ROC curves associated with these times
are in fig. 6.11 (standard methods), fig. 6.6 (confidence mapping with varying stage
failure tolerance) and fig. 6.9 (confidence mapping with virtual attribute subsetting).
These results show confidence mapping to be slightly binary detection. However,
profiling tests found that this was entirely due to idiosyncratic compiler optimisations,
and would probably not reappear on other platforms. This advantage also only applied
for standard confidence mapping, with no stage failure tolerance – any stage failure tol-
erance made confidence mapping slower than binary detection, while virtual attribute
subsetting was slower still.

Chapter 6 Confidence measures for object detection 103
Table 6.5: Time in seconds taken to classify the face dataset with different methods
A graph of the mean times is plotted in fig. 6.15.
0
500
1000
1500B
ina
ry
Hill-clim
bin
g
Co
nfid
en
cem
ap
pin
g
To
lera
nce
=1
To
lera
nce
=2
To
lera
nce
=3
p=
0.9
p=
0.8
p=
0.7
Cla
ssif
icati
on
tim
e (
seco
nd
s)
Confidence mapping with
virtual attribute subsetting
Confidence mapping with
failure toleranceStandard methods
Figure 6.15: Graph of time in seconds taken to classify the face dataset with different
methods

Chapter 6 Confidence measures for object detection 104
6.5 Conclusions
This chapter introduced a confidence measurement to the formerly binary Haar Classi-
fier Cascade object detection algorithm. It was used in two different ways, and tested
on three image sets. The tests showed that the ‘confidence mapping’ form was almost
always more accurate and sometimes faster than binary object detection. On the fish
and seahorse segment detection problems it also showed itself to be capable of com-
bining the confidences from multiple cascades, and to be more robust to suboptimal
choices of cascade training angle range than binary detection using the same cascades.
If additional accuracy is required, tests also showed that virtual attribute subsetting
on the cascade stages can increase accuracy at the expense of classification time.
These confidence measurements may be taken from any Haar Classifier Cascade.
The face detection used an existing cascade, while the fish and seahorse detections used
the cascades trained and used for binary detection in chapter 5. The training process
was not changed to optimise for confidence-based object detection.