
2019 CMwBang! site Lecture 7 Class YouTube Channel Wed. 9 ...
101
Kepler Geometry of IHO (Isotropic Harmonic Oscillator) Elliptical Orbits (Ch. 9 and Ch. 11 of Unit 1) Constructing 2D IHO orbital phasor “clock” dynamics in uniform-body Constructing 2D IHO orbits using Kepler anomaly plots Mean-anomaly and eccentric-anomaly geometry Calculus and vector geometry of IHO orbits A confusing introduction to Coriolis-centrifugal force geometry (Derived better in Ch. 12) Some Kepler’s “laws” for all central (isotropic) force F(r) fields Angular momentum invariance of IHO: F(r)=-k·r with U(r)=k·r 2 /2 (Derived here) Angular momentum invariance of Coulomb: F(r)=-GMm/r 2 with U(r)=-GMm·/r (Derived in Unit 5) Total energy E=KE+PE invariance of IHO: F(r)=-k·r (Derived here) Total energy E=KE+PE invariance of Coulomb: F(r)=-GMm/r 2 (Derived in Unit 5) Introduction to dual matrix operator contact geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1 •p=1 Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1 -ellipse position p ( r′•p=0=r•p′) Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry Vector calculus of tensor operation Q:Where is this headed? A: Lagrangian-Hamiltonian duality Lecture 7 Wed. 9.18.2019 BoxIt simulation: IHO orbits w/Stokes plot RelaWavity Simulation: IHO orbital time rates of change RelaWavity Simulation: Exegesis Plot Class YouTube Channel 2019 CMwBang! site Web Links
Transcript of 2019 CMwBang! site Lecture 7 Class YouTube Channel Wed. 9 ...

Kepler Geometry of IHO (Isotropic Harmonic Oscillator) Elliptical Orbits (Ch. 9 and Ch. 11 of Unit 1)
Constructing 2D IHO orbital phasor “clock” dynamics in uniform-body Constructing 2D IHO orbits using Kepler anomaly plots
Mean-anomaly and eccentric-anomaly geometry Calculus and vector geometry of IHO orbits A confusing introduction to Coriolis-centrifugal force geometry (Derived better in Ch. 12)
Some Kepler’s “laws” for all central (isotropic) force F(r) fields Angular momentum invariance of IHO: F(r)=-k·r with U(r)=k·r2/2 (Derived here) Angular momentum invariance of Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r (Derived in Unit 5) Total energy E=KE+PE invariance of IHO: F(r)=-k·r (Derived here) Total energy E=KE+PE invariance of Coulomb: F(r)=-GMm/r2 (Derived in Unit 5)
Introduction to dual matrix operator contact geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation Q:Where is this headed? A: Lagrangian-Hamiltonian duality
Lecture 7 Wed. 9.18.2019
BoxIt simulation: IHO orbits w/Stokes plotRelaWavity Simulation: IHO orbital time rates of changeRelaWavity Simulation: Exegesis Plot
Class YouTube Channel
2019 CMwBang! site
Web Links
https://modphys.hosted.uark.edu/markup/RelaWavityWeb.html?plotType=1,0&semiMajor=1.0&semiMinor=0.125

Lecture #7
This Lecture’s Reference Link ListingWeb Resources - front pageUAF Physics UTube channel
Classical Mechanics with a Bang!Principles of Symmetry, Dynamics, and Spectroscopy
Quantum Theory for the Computer Age
Modern Physics and its Classical Foundations2018 AMOP
2019 Advanced Mechanics
2017 Group Theory for QM2018 Adv CM
Pirelli Site: Phasors animimation CMwithBang Lecture #6, page=70 (9.10.18) BoxIt Web Simulations:
Generic/Default Most Basic A-Type Basic A-Type w/reference lines Basic A-Type A-Type with Potential energy A-Type with Potential energy and Stokes Plot A-Type w/3 time rates of change A-Type w/3 time rates of change with Stokes Plot B-Type (A=1.0, B=-0.05, C=0.0, D=1.0)
RelaWavity Web Elliptical Motion Simulations: Orbits with b/a=0.125 Orbits with b/a=0.5 Orbits with b/a=0.7 Exegesis with b/a=0.125 Exegesis with b/a=0.5 Exegesis with b/a=0.7 Contact Ellipsometry
Burning a hole in reality—design for a new laser may be powerful enough to pierce space-time Trampoline mirror may push laser pulse through fabric of the Universe Achieving_Extreme_Light_Intensities_using_Optically_Curved_Relativistic_Plasma_Mirrors_-_Vincenti-prl-2019 A_Soft_Matter_Computer_for_Soft_Robots_-_Garrad-sr-2019 Correlated_Insulator_Behaviour_at_Half-Filling_in_Magic-Angle_Graphene_Superlattices_-_cao-n-2018
https://modphys.hosted.uark.edu/markup/RelaWavityWeb.html?plotType=1,0&semiMajor=1.0&semiMinor=0.125
https://modphys.hosted.uark.edu/markup/RelaWavityWeb.html?plotType=1,1&semiMajor=1.0&semiMinor=0.125

RelaWavity Web Simulation: Contact Ellipsometry BoxIt Web Simulation: Elliptical Motion (A-Type) CMwBang Course: Site Title Page Pirelli Relativity Challenge: Describing Wave Motion With Complex Phasors UAF Physics UTube channel BounceIt Web Animation - Scenarios:
Generic Scenario: 2-Balls dropped no Gravity (7:1) - V vs V Plot (Power=4) 1-Ball dropped w/Gravity=0.5 w/Potential Plot: Power=1, Power=4 7:1 - V vs V Plot: Power=1 3-Ball Stack (10:3:1) w/Newton plot (y vs t) - Power=4 3-Ball Stack (10:3:1) w/Newton plot (y vs t) - Power=1 3-Ball Stack (10:3:1) w/Newton plot (y vs t) - Power=1 w/Gaps 4-Ball Stack (27:9:3:1) w/Newton plot (y vs t) - Power=4 4-Newton's Balls (1:1:1:1) w/Newtonian plot (y vs t) - Power=4 w/Gaps 6-Ball Totally Inelastic (1:1:1:1:1:1) w/Gaps: Newtonian plot (t vs x), V6 vs V5 plot 5-Ball Totally Inelastic Pile-up w/ 5-Stationary-Balls - Minkowski plot (t vs x1) w/Gaps 1-Ball Totally Inelastic Pile-up w/ 5-Stationary-Balls - Vx2 vs Vx1 plot w/Gaps
Velocity Amplification in Collision Experiments Involving Superballs - Harter, 1971 MIT OpenCourseWare: High School/Physics/Impulse and Momentum Hubble Site: Supernova - SN 1987A
Running Reference Link ListingPrior to Lecture #7
More Advanced QM and classical references at the end of this Lecture
X2 paper: Velocity Amplification in Collision Experiments Involving Superballs - Harter, et. al. 1971 (pdf) Car Collision Web Simulator: https://modphys.hosted.uark.edu/markup/CMMotionWeb.html Superball Collision Web Simulator: https://modphys.hosted.uark.edu/markup/BounceItWeb.html; with Scenarios: 1007 BounceIt web simulation with g=0 and 70:10 mass ratio With non zero g, velocity dependent damping and mass ratio of 70:35 Elastic Collision Dual Panel Space vs Space: Space vs Time (Newton) , Time vs. Space(Minkowski) Inelastic Collision Dual Panel Space vs Space: Space vs Time (Newton), Time vs. Space(Minkowski) Matrix Collision Simulator:M1=49, M2=1 V2 vs V1 plot <<Under Construction>>
With g=0 and 70:10 mass ratio With non zero g, velocity dependent damping and mass ratio of 70:35 M1=49, M2=1 with Newtonian time plot M1=49, M2=1 with V2 vs V1 plot Example with friction Low force constant with drag displaying a Pass-thru, Fall-Thru, Bounce-Off m1:m2= 3:1 and (v1, v2) = (1, 0) Comparison with Estrangian
m1:m2 = 4:1 v2 vs v1, y2 vs y1 m1:m2 = 100:1, (v1, v2)=(1, 0): V2 vs V1 Estrangian plot, y2 vs y1 plot
v2 vs v1 and V2 vs V1, (v1, v2)=(1, 0.1), (v1, v2)=(1, 0) y2 vs y1 plots: (v1, v2)=(1, 0.1), (v1, v2)=(1, 0), (v1, v2)=(1, -1) Estrangian plot V2 vs V1: (v1, v2)=(0, 1), (v1, v2)=(1, -1)
m1:m2 = 3:1BounceIt Dual plots BounceItIt Web Animation - Scenarios:
49:1 y vs t, 49:1 V2 vs V1, 1:500:1 - 1D Gas Model w/ faux restorative force (Cool), 1:500:1 - 1D Gas (Warm), 1:500:1 - 1D Gas Model (Cool, Zoomed in), Farey Sequence - Wolfram Fractions - Ford-AMM-1938 Monstermash BounceItIt Animations: 1000:1 - V2 vs V1, 1000:1 with t vs x - Minkowski Plot Quantum Revivals of Morse Oscillators and Farey-Ford Geometry - Li-Harter-2013 Quantum_Revivals_of_Morse_Oscillators_and_Farey-Ford_Geometry - Li-Harter-cpl-2015 Quant. Revivals of Morse Oscillators and Farey-Ford Geom. - Harter-Li-CPL-2015 (Publ.) Velocity_Amplification_in_Collision_Experiments_Involving_Superballs-Harter-1971 WaveIt Web Animation - Scenarios: Quantum_Carpet, Quantum_Carpet_wMBars, Quantum_Carpet_BCar, Quantum_Carpet_BCar_wMBars Wave Node Dynamics and Revival Symmetry in Quantum Rotors - Harter-JMS-2001 Wave Node Dynamics and Revival Symmetry in Quantum Rotors - Harter-jms-2001 (Publ.)
AJP article on superball dynamics AAPT Summer Reading List
Scitation.org - AIP publications HarterSoft Youtube Channel
These are hot off the presses. Out in MISC for quick reference. Sorting_ultracold_atoms_in_a_three-dimensional_optical_lattice_in_a_ realization_of_Maxwell's_Demon - Kumar-n-2018Synthetic_three-dimensional_atomic_structures_assembled_atom_by_atom - Barredo-n-2018Older ones:Wave-particle_duality_of_C60_molecules - Arndt-ltn-1999Optical_Vortex_Knots_-_One_Photon__At_A_Time - Tempone-Wiltshire-Sr-2018Baryon_Deceleration_by_Strong_Chromofields_in_Ultrarelativistic_, Nuclear_Collisions - Mishustin-PhysRevC-2007, APS Link & Abstract Hadronic Molecules - Guo-x-2017 Hidden-charm_pentaquark_and_tetraquark_states - Chen-pr-2016

Introducing 2D IHO orbits and phasor geometry Phasor “clock” geometry

Fx
v0Fy
F=-r(a) (b)
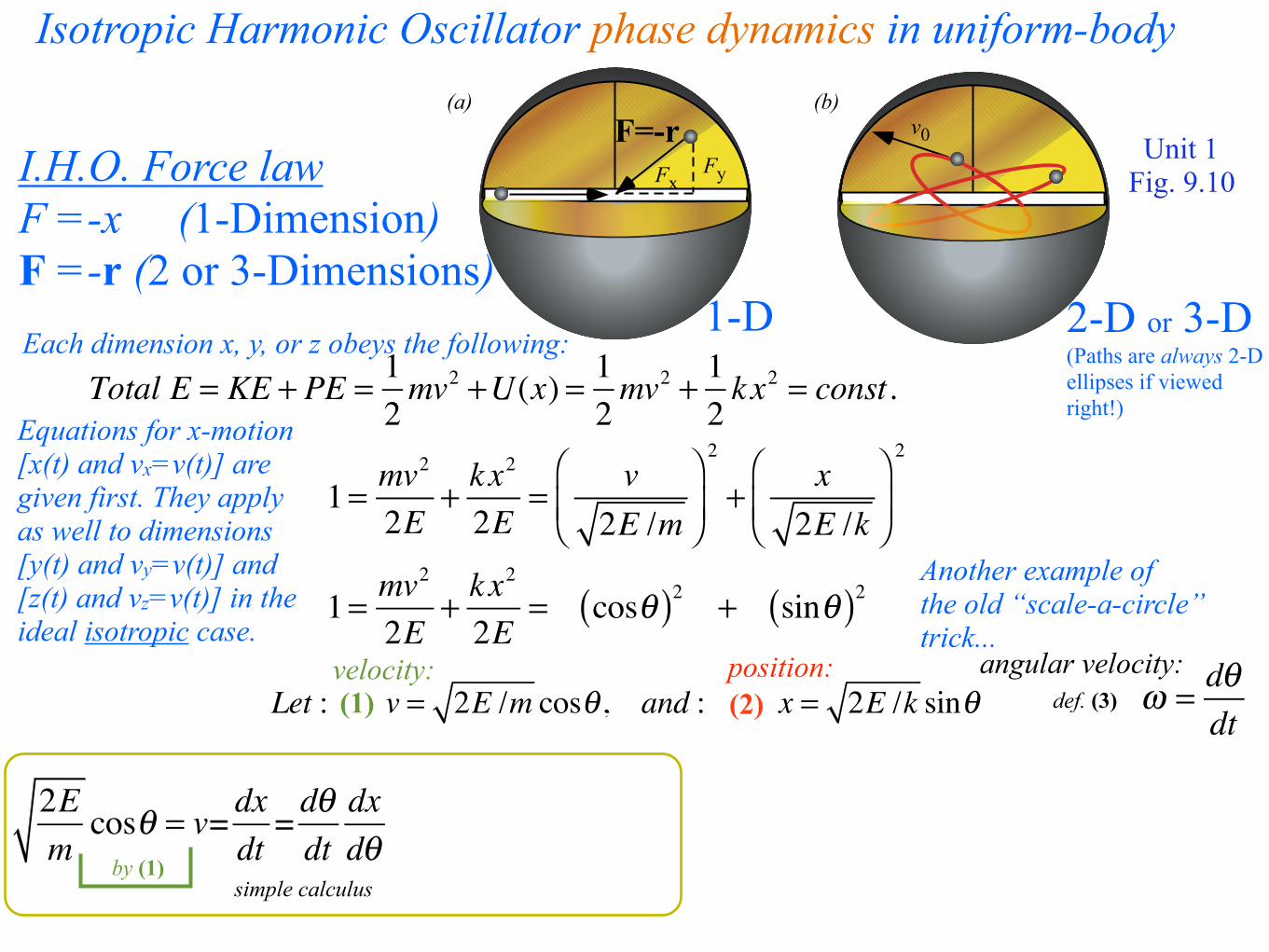
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
1-D 2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
velocity: position:

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)velocity: position: angular velocity:

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
2Emcosθ = v= dx
dt
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
by (1)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)velocity: position: angular velocity:
Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
2Emcosθ = v= dx
dt= dθdt
dxdθ
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
by (1)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)velocity: position: angular velocity:
simple calculus

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
2Emcosθ = v= dx
dt= dθdt
dxdθ=ω dx
dθ
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
by (1)by def. (3)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)velocity: position: angular velocity:

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
2Emcosθ = v= dx
dt= dθdt
dxdθ=ω dx
dθ=ω 2E
kcosθ
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
by (1)by def. (3) by (2)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)velocity: position: angular velocity:

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
2Emcosθ = v= dx
dt= dθdt
dxdθ=ω dx
dθ=ω 2E
kcosθ ω = dθ
dt
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
by (1)by def. (3) by (2)
by def. (3)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
2Emcosθ = v= dx
dt= dθdt
dxdθ=ω dx
dθ=ω 2E
kcosθ ω = dθ
dt=
2Emcosθ
2Ekcosθ
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
by (1)by def. (3) by (2)
by def. (3)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)
by (2) derivative
divide (1)

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
2Emcosθ = v= dx
dt= dθdt
dxdθ=ω dx
dθ=ω 2E
kcosθ ω = dθ
dt=
2Emcosθ
2Ekcosθ
= km
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
by (1)by def. (3) by (2)
by def. (3)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)
by (2) derivative
divide (1)

Fx
v0Fy
F=-r(a) (b)
Total E = KE + PE = 12mv2 +U(x) = 1
2mv2 + 1
2kx2 = const.
1= mv2
2E+ kx
2
2E= v
2E /m⎛
⎝⎜⎞
⎠⎟
2
+ x2E /k
⎛
⎝⎜⎞
⎠⎟
2
1= mv2
2E+ kx
2
2E= cosθ( )2 + sinθ( )2
2Emcosθ = v= dx
dt= dθdt
dxdθ=ω dx
dθ=ω 2E
kcosθ ω = dθ
dt= k
m
Let : v = 2E /m cosθ , and : x = 2E /k sinθ(1) (2)
by (1)by def. (3) by (2)
by def. (3)
Isotropic Harmonic Oscillator phase dynamics in uniform-body
I.H.O. Force law F =-x (1-Dimension) F =-r (2 or 3-Dimensions)Each dimension x, y, or z obeys the following:
Another example of the old “scale-a-circle” trick...
1-D
Unit 1 Fig. 9.10
Equations for x-motion [x(t) and vx=v(t)] are given first. They apply as well to dimensions [y(t) and vy=v(t)] and [z(t) and vz=v(t)] in the ideal isotropic case.
by integration given constant ω:
θ = ω⋅dt∫ =ω⋅t +α
2-D or 3-D (Paths are always 2-D ellipses if viewed right!)
ω = dθdt
def. (3)angular velocity:

Review of IHO orbital phasor “clock” dynamics in uniform-body with two “movie” examples

0 12
3
4
5
6
78-7-6
-5
-4
-3
-2-1
01
2
3 4 5
6
78
-7-6
-5
-4-3
-2-1
(2,4)(3,5)(4,6)
(5,7)
(6,8)
(7,-7)
x-position
x-velocity vx/ω
position
x
velocity vx/ω
(a) 1-D Oscillator Phasor Plot
(b) 2-D Oscillator Phasor Plot
Phasor goes
clockwise
by angle ω t
ω t
(8,-6)(9,-5)
y-velocity
vy/ω
(x-Phase 45°
behind
the y-Phase)y-position
φ counter-clockwise
if y is behind x
clockwise
orbit
if x is behind y
(1,3) Left-
handed
Right-
handed
(0,2)
Fx
v0Fy
F=-r(a) (b)
Unit 1 Fig. 9.10
Review of IHO orbital phase dynamics in uniform-body
Introduction to Phasors at our Pirelli Relativity SiteBoxIt web simulation - With y-Phasor is on other side of xy plot
RelaWavity web simulation - Contact ellipsometry

Geometry of Kepler anomalies for vectors [r(φ), v(φ)] in coordinate (x,y) space rendered by animation web-apps BoxIt and RelaWavity described below after p.70.RelaWavity web simulation - Contact ellipsometry (User Mouse Input allowed for setting phasor values)
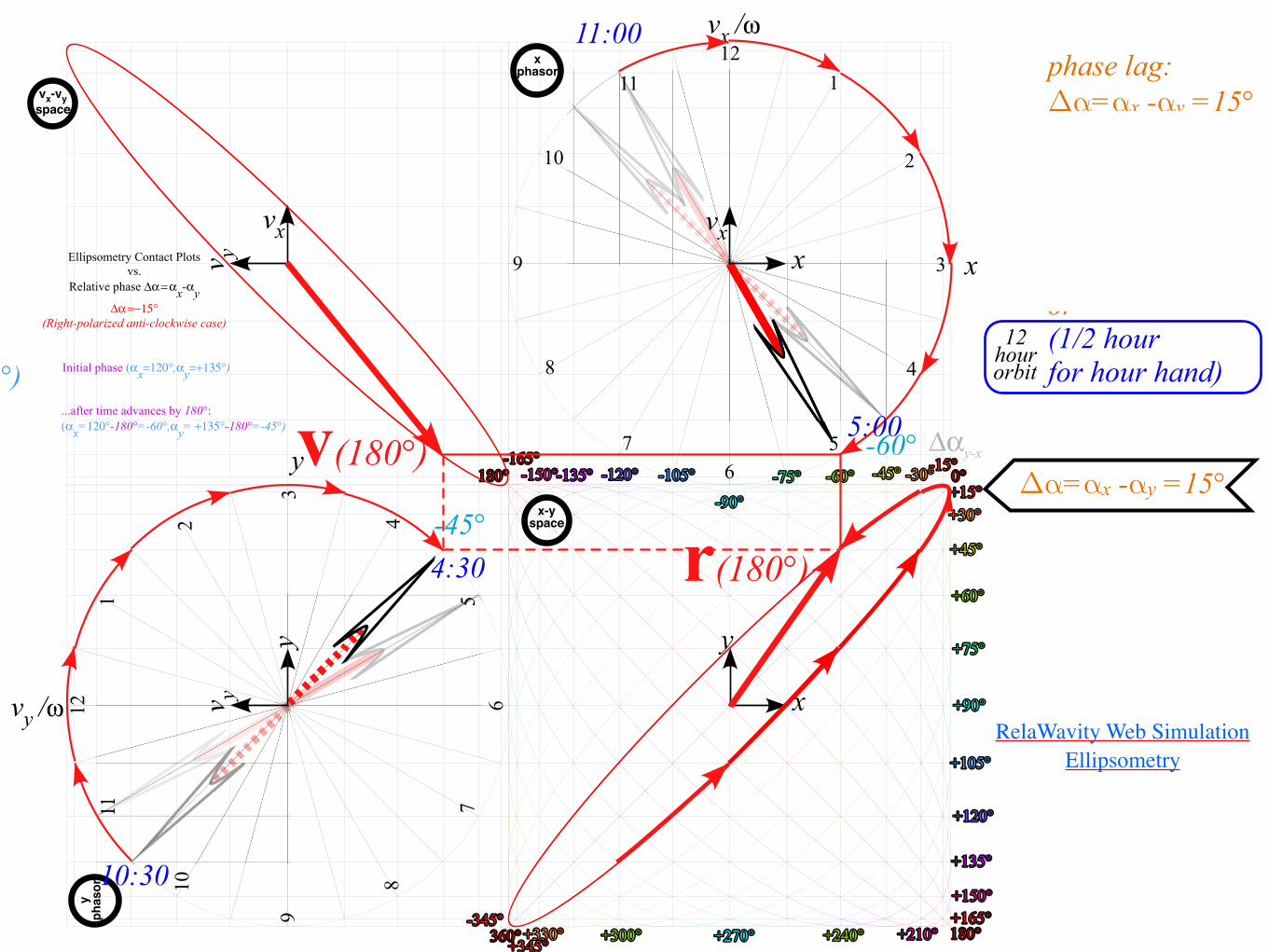
RelaWavity Web Simulation Ellipsometry

Geometry of Kepler anomalies for vectors [r(φ), v(φ)] in coordinate (x,y) space rendered by animation web-apps BoxIt and RelaWavity described below after p.7 and p.17.
RelaWavity web simulation - Contact ellipsometry (User Mouse Input allowed for setting phasor values)
RelaWavity Web Simulation Ellipsometry
x
y
121
2
3
4
56
7
8
9
10
121
2
3
4
56
7
8
9
10
11
00°°--1155°°--3300°°--4455°°++1155°°++3300°°
++4455°°
--6600°°
++6600°°
--7755°°
++7755°°
--9900°°
++9900°°
--110055°°
++110055°°
--112200°°
++112200°°
--113355°°
++113355°°
--115500°°
++115500°°
--116655°°
++116655°°
118800°°
118800°°++227700°° ++224400°°++330000°°336600°° ++221100°°++333300°°
vx /ω
vy /ω
Δαy-x
xphasor
yphasor
x-yspace
x
y
xvx
y
v y
++334455°°--334455°°
...after time advances by 180°:(αx=120°-180°=-60°,αy= +135°-180°=-45°)
r(180°)
Ellipsometry Contact Plotsvs.
Relative phase Δα=αx-αyΔα=−15°
(Right-polarized anti-clockwise case)
...after time advances by 180°:(αx=120°-180°=-60°,αy= +135°-180°=-45°)
Initial phase (αx=120°,αy=+135°)
vxv y
vx-vyspace
v(180°)-45°
-60°
phase lag: Δα=αx -αy =15° (2.5 seconds for second hand) or (2.5 minutes for minute hand) or (1/2 hour for hour hand)
1 minute orbit
1 hour orbit
12 hour orbit
Δα=αx -αy =15°
10:30
11:00
5:00
4:30
RelaWavity Web Simulation Ellipsometry

Constructing 2D IHO orbits using Kepler anomaly plots Mean-anomaly and eccentric-anomaly geometry Calculus and vector geometry of IHO orbits A confusing introduction to Coriolis-centrifugal force geometry (Derived better in Ch. 12)

b bsin ω t
ω t
ω ta cos ω t
ay=bsin ω t
x=a cos ω t
ω t
r
φ
b
-b
-b
a
a
-a
ω t
a
y=bsin ω t
x=a cos ω t
r
b
-b
-b
a
a
-a
-a
ω t
Step 1. Draw concentriccircles of radius a and band a radius OA at angleω t
Step 3. Draw horizontial line BRfrom b-circle at ω t to line AX.Intersection is orbit point R.
Step 2. Draw vertical line AXfrom a-circle at ωt to x-axis
O
A
O
A
O
A
X X
BR
abω t
b
-b
-b
a
-a
-a
ab
O X O X
Step 4-NRepeatas oftenas needed
ba
Linear HarmonicForce-FieldOrbits
Unit 1 Fig. 11.1
(top 2/3’s)
Kepler’s Mean Anomaly Line (slope angle θ =ωt)
Kepler’s Eccentric Anomaly Line
(slope is polar angle φ=atan[y/x])
A
RB
Zig!
Zag!
Another example of a
Zig-Zag construction:

b bsin ω t
ω t
ω ta cos ω t
ay=bsin ω t
x=a cos ω t
ω t
r
φ
b
-b
-b
a
a
-a
ω t
a
y=bsin ω t
x=a cos ω t
r
b
-b
-b
a
a
-a
-a
ω t
Step 1. Draw concentriccircles of radius a and band a radius OA at angleω t
Step 3. Draw horizontial line BRfrom b-circle at ω t to line AX.Intersection is orbit point R.
Step 2. Draw vertical line AXfrom a-circle at ωt to x-axis
O
A
O
A
O
A
X X
BR
abω t
b
-b
-b
a
-a
-a
ab
O X O X
Step 4-NRepeatas oftenas needed
ba
Linear HarmonicForce-FieldOrbits
Unit 1 Fig. 11.1
Kepler’s Mean Anomaly
Line
Kepler’s Eccentric Anomaly Line
(slope is polar angle φ=atan[y/x])

Constructing 2D IHO orbits using Kepler anomaly plots Mean-anomaly and eccentric-anomaly geometry Calculus and vector geometry of IHO orbits A confusing introduction to Coriolis-centrifugal force geometry (Derived better in Ch. 12)
r(t) φv(t)/ω
90°
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
r(t)φ=ω tv(t)/ω
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
90°
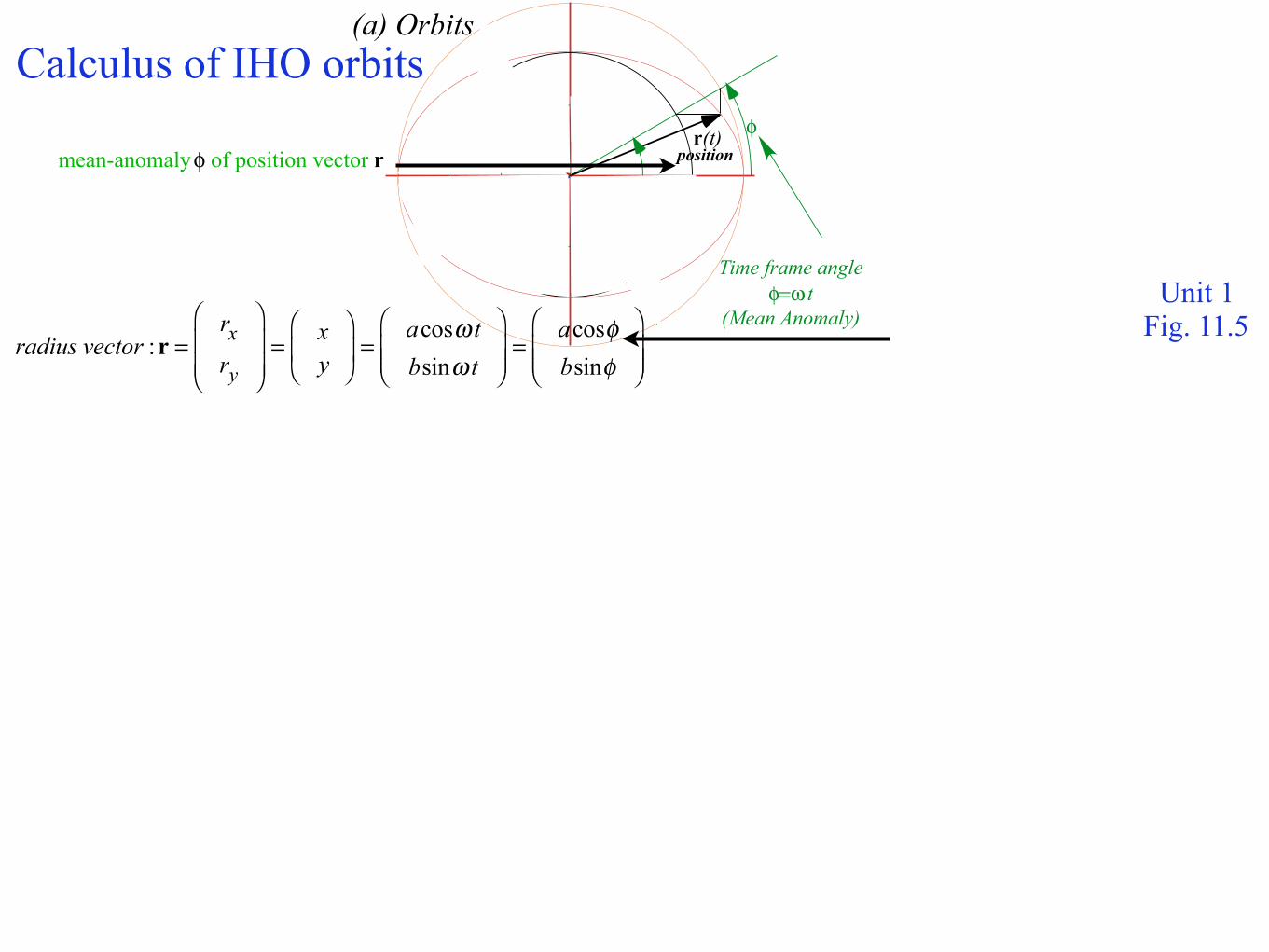
Time frame angle
φ=ω t(Mean Anomaly)
(a) Orbits (b) Tangents
radius vector :r =rx
ry
⎛
⎝⎜⎜
⎞
⎠⎟⎟= x
y
⎛
⎝⎜
⎞
⎠⎟ =
acosω tbsinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
acosφbsinφ
⎛
⎝⎜⎜
⎞
⎠⎟⎟
Unit 1 Fig. 11.5
Calculus of IHO orbits
mean-anomaly φ of position vector r

r(t) φv(t)/ω
90°
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
r(t)φ=ω tv(t)/ω
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
90°
Time frame angle
φ=ω t(Mean Anomaly)
(a) Orbits (b) Tangents
radius vector :r =rx
ry
⎛
⎝⎜⎜
⎞
⎠⎟⎟= x
y
⎛
⎝⎜
⎞
⎠⎟ =
acosω tbsinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
acosφbsinφ
⎛
⎝⎜⎜
⎞
⎠⎟⎟
velocity vector : v =vx
vy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω sinω tbω cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dr
dt= !r =
acos φ + 2π( )
bsin φ + 2π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
( for ω = 1)
Unit 1 Fig. 11.5
Calculus of IHO orbitsTo make velocity vector v just rotate by π/2 or 90° the mean-anomaly φ of position vector r
mean-anomaly φ of position vector r rotated by π/2 or 90° is m.a. of vector v

r(t) φv(t)/ω
90°
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
r(t)φ=ω tv(t)/ω
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
90°
Time frame angle
φ=ω t(Mean Anomaly)
(a) Orbits (b) Tangents
radius vector :r =rx
ry
⎛
⎝⎜⎜
⎞
⎠⎟⎟= x
y
⎛
⎝⎜
⎞
⎠⎟ =
acosω tbsinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
acosφbsinφ
⎛
⎝⎜⎜
⎞
⎠⎟⎟
velocity vector : v =vx
vy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω sinω tbω cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dr
dt= !r =
acos φ + 2π( )
bsin φ + 2π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
( for ω = 1)
accelerationor force vector :Fm= a =
ax
ay
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω 2 cosω t
−bω 2 sinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dv
dt= !v = !!r = d2r
dt2=
acos φ + 22π( )
bsin φ + 22π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
Unit 1 Fig. 11.5
or changeof velocity
Calculus of IHO orbitsTo make velocity vector v just rotate by π/2 or 90° the mean-anomaly φ of position vector r
mean-anomaly φ of position vector r rotated by π/2 or 90° is m.a. of vector v
m.a. φ+π/2 of vector v rotated by another π/2 is m.a. of vector a

r(t) φv(t)/ω
90°
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
r(t)φ=ω tv(t)/ω
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
90°
Time frame angle
φ=ω t(Mean Anomaly)
(a) Orbits (b) Tangents
radius vector :r =rx
ry
⎛
⎝⎜⎜
⎞
⎠⎟⎟= x
y
⎛
⎝⎜
⎞
⎠⎟ =
acosω tbsinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
acosφbsinφ
⎛
⎝⎜⎜
⎞
⎠⎟⎟
velocity vector : v =vx
vy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω sinω tbω cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dr
dt= !r =
acos φ + 2π( )
bsin φ + 2π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
( for ω = 1)
accelerationor force vector :Fm= a =
ax
ay
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω 2 cosω t
−bω 2 sinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dv
dt= !v = !!r = d2r
dt2=
acos φ + 22π( )
bsin φ + 22π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
jerk or changeof acceleration : j=jxjy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
+aω 3sinω t
−bω 3cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= da
dt= !a = !!v = !!!r = d3r
dt3=
acos φ + 23π( )
bsin φ + 23π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
Unit 1 Fig. 11.5
or changeof velocity or changeof velocity
Calculus of IHO orbitsTo make velocity vector v just rotate by π/2 or 90° the mean-anomaly φ of position vector r
mean-anomaly φ of position vector r rotated by π/2 or 90° is m.a. of vector v
m.a. φ+π/2 of vector v rotated by another π/2 is m.a. of vector a
...and so forth...

r(t) φv(t)/ω
90°
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
r(t)φ=ω tv(t)/ω
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
90°
Time frame angle
φ=ω t(Mean Anomaly)
(a) Orbits (b) Tangents
radius vector :r =rx
ry
⎛
⎝⎜⎜
⎞
⎠⎟⎟= x
y
⎛
⎝⎜
⎞
⎠⎟ =
acosω tbsinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
acosφbsinφ
⎛
⎝⎜⎜
⎞
⎠⎟⎟
velocity vector : v =vx
vy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω sinω tbω cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dr
dt= !r =
acos φ + 2π( )
bsin φ + 2π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
( for ω = 1)
accelerationor force vector :Fm= a =
ax
ay
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω 2 cosω t
−bω 2 sinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dv
dt= !v = !!r = d2r
dt2=
acos φ + 22π( )
bsin φ + 22π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
jerk or changeof acceleration : j=jxjy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
+aω 3sinω t
−bω 3cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= da
dt= !a = !!v = !!!r = d3r
dt3=
acos φ + 23π( )
bsin φ + 23π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
inaugurationor changeof jerk :i =ixiy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
+aω 4 cosω t
+bω 4 sinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dj
dt= !j= !!a = !!!v = !!!!r = d4r
dt4=
acos φ + 24π( )
bsin φ + 24π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
Unit 1 Fig. 11.5
or changeof velocity or changeof velocity or changeof velocity
Calculus of IHO orbitsTo make velocity vector v just rotate by π/2 or 90° the mean-anomaly φ of position vector r
mean-anomaly φ of position vector r rotated by π/2 or 90° is m.a. of vector v
m.a. φ+π/2 of vector v rotated by another π/2 is m.a. of vector a
...and so forth...
...and so on......But, now it repeats after 4 t-derivatives

r(t) φv(t)/ω
90°
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
r(t)φ=ω tv(t)/ω
a(t)/ω2
j(t)/ω3
acceleration
jerk
velocity
position
90°
90°
Time frame angle
φ=ω t(Mean Anomaly)
(a) Orbits (b) Tangents
radius vector :r =rx
ry
⎛
⎝⎜⎜
⎞
⎠⎟⎟= x
y
⎛
⎝⎜
⎞
⎠⎟ =
acosω tbsinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
acosφbsinφ
⎛
⎝⎜⎜
⎞
⎠⎟⎟
velocity vector : v =vx
vy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω sinω tbω cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dr
dt= !r =
acos φ + 2π( )
bsin φ + 2π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
( for ω = 1)
accelerationor force vector :Fm= a =
ax
ay
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω 2 cosω t
−bω 2 sinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dv
dt= !v = !!r = d2r
dt2=
acos φ + 22π( )
bsin φ + 22π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
jerk or changeof acceleration : j=jxjy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
+aω 3sinω t
−bω 3cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= da
dt= !a = !!v = !!!r = d3r
dt3=
acos φ + 23π( )
bsin φ + 23π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
inaugurationor changeof jerk :i =ixiy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
+aω 4 cosω t
+bω 4 sinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟= dj
dt= !j= !!a = !!!v = !!!!r = d4r
dt4=
acos φ + 24π( )
bsin φ + 24π( )
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟
Unit 1 Fig. 11.5
or changeof velocity or changeof velocity or changeof velocity
Calculus of IHO orbitsTo make velocity vector v just rotate by π/2 or 90° the mean-anomaly φ of position vector r
mean-anomaly φ of position vector r rotated by π/2 or 90° is m.a. of vector v
m.a. φ+π/2 of vector v rotated by another π/2 is m.a. of vector a
...and so forth...
...and so on......But, now it repeats after 4 t-derivatives
Link → IHO Exegesis Plot
Link ⇒ BoxIt simulation of IHO orbits
Link → IHO orbital time rates of change

Geometry of Kepler anomalies for vectors [r(φ), v(φ), a(φ), j(φ),] in coordinate (x,y) space rendered by animation web-apps BoxIt and RelaWavity.
RelaWavity orbit web-app
Link → IHO orbital time rates of change

https://modphys.hosted.uark.edu/markup/BoxItWeb.html
Geometry of Kepler anomalies for vectors [r(φ)] in coordinate (x,y) space and 2-particle (x1,x2) space rendered by animation web-apps BoxIt.
BoxIt Web Stokes Simulation
BoxIt minimal detailBoxIt more detailBoxIt still more detail

Geometry of Kepler anomalies for vectors [r(φ), v(φ), a(φ), j(φ),] in coordinate (x,y) space and 2-particle (x1,x2) space rendered by animation web-apps BoxIt. BoxIt Web Simulation - w/Derivatives
BoxIt minimal detailBoxIt more detailBoxIt still more detail

Geometry of vectors [r(φ), p(φ)] and quantum spin S-space and 2-particle (x1,x2) space rendered by animation web-apps BoxIt.
BoxIt Web Simulation - B-Type Motion
BoxIt minimal detailBoxIt more detailBoxIt still more detail
Constructing 2D IHO orbits using Kepler anomaly plots Mean-anomaly and eccentric-anomaly geometry Calculus and vector geometry of IHO orbits A confusing introduction to Coriolis-centrifugal force geometry (Derived better in Ch. 12)

F = -kr
orbital velocity=V
(b) “Carnival kid” orbiting inspace attached to a spring
centrifugalforce=+kr=+mω2r
ω t
centripetalforce=
(due to spring)
Carnival kidsays:
“This is awful!I can hardlyhold ontothis darnspring.”
F = -kr
orbital velocity=V
(a) “Earthronaut” orbitingtunnel inside Earth
centrifugalforce=+kr=+mω2r
ω t
centripetalforce=
(due to gravity)
Earthronautsays:
“This is great!I’m weightless.”
apogee(x=a, y=0)aphelion=a
perigee(x=0,y=b)
θperhelion=bmass gaining speed
as it falls
VelocityV
θVelocityV centripetal force F=-kr
Negative power( F•V=|F||V|cos θ <0)
Positive power( F•V=|F||V|cos θ >0)
mass losing speedas it rises
Unit 1 Fig. 11.2
Unit 1 Fig. 11.3
(Radius r decreasing)(Radius r increasing)

centrifugal force
Velocityalongradialpath
Coriolis force(depends onradial pathspeed)
RotationalvelocityV=ωr
(a) Centrifugal and CoriolisForces on Merry-Go-Round
centrifugal force
Velocityalongradialpath
Coriolis forcePhysicist Force (where m wants to go)
Mathematician Force (to hold m back)
Constraint force keeps m in radial slot

centrifugal force
Velocityalongradialpath
Coriolis force(depends onradial pathspeed)
RotationalvelocityV=ωr
(a) Centrifugal and CoriolisForces on Merry-Go-Round
centrifugal force
Velocityalongradialpath
Coriolis forcePhysicist Force (where m wants to go)
Mathematician Force (to hold m back)
Constraint force keeps m in radial slot
Velocity
V
centripetal force F=-kr
centrifugal force
Total inertial force F=+kr
Coriolis forcecircle
of
curvature
(b) Centrifugal and Coriolis
Forces on Oscillator Orbit
(Falling phase)

centrifugal force
Velocityalongradialpath
Coriolis force(depends onradial pathspeed)
RotationalvelocityV=ωr
(a) Centrifugal and CoriolisForces on Merry-Go-Round
centrifugal force
Velocityalongradialpath
Coriolis forcePhysicist Force (where m wants to go)
Mathematician Force (to hold m back)
Constraint force keeps m in radial slot
Velocity
V
centripetal force F=-kr
centrifugal force
Total inertial force F=+kr
Coriolis forcecircle
of
curvature
(b) Centrifugal and Coriolis
Forces on Oscillator Orbit
(Falling phase)

centrifugal force
Velocityalongradialpath
Coriolis force(depends onradial pathspeed)
RotationalvelocityV=ωr
(a) Centrifugal and CoriolisForces on Merry-Go-Round
centrifugal force
Velocityalongradialpath
Coriolis forcePhysicist Force (where m wants to go)
Mathematician Force (to hold m back)
Constraint force keeps m in radial slot
(c) Centrifugal and Coriolis
Forces on Oscillator Orbit
(Rising phase)
Velocity
V
centripetal force F=-kr
centrifugal force
Total inertial force F=+kr
Coriolis force
circle
of
curvature

Velocity
V
centripetal force F=-kr
centrifugal force
Total inertial force F=+kr
Coriolis force
centrifugal force
Velocity
along
radial
path
Coriolis force
(depends on
radial path
speed)
Rotational
velocity
V=ωr
circle
of
curvature
Velocity
V
centrifugal force is
Total inertial force F=+kr
circle
of
curvature
(a) Centrifugal and Coriolis
Forces on Merry-Go-Round
(b) Centrifugal and Coriolis
Forces on Oscillator Orbit
(Falling phase)
(c) Centrifugal and Coriolis
Forces on Oscillator Orbit
(Rising phase)
centrifugal force
Velocity
along
radial
path
Coriolis force
centripetal force F=-kr
Velocity
V
centripetal force F=-kr
centrifugal force
Total inertial force F=+kr
Coriolis force
circle
of
curvature
(d) Centrifugal Force
on Oscillator Orbit
(apogee and perigee)
Velocity
V
centripetal force F=-kr
centrifugal force is
Total inertial force F=+kr
Unit 1 Fig. 11.4
a-d
A little confusing? Discussion of Coriolis forces will be done more elegantly and made more physically intuitive in Ch. 12 of Unit1 and in Unit 6.
Physicist Force (where m wants to go)
Mathematician Force (to hold m back)
Constraint force keeps m in radial slot

Some Kepler’s “laws” for all central (isotropic) force F(r) fields Angular momentum invariance of IHO: F(r)=-k·r with U(r)=k·r2/2 (Derived here) Angular momentum invariance of Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r (Derived in Unit 5) Total energy E=KE+PE invariance of IHO: F(r)=-k·r (Derived here) Total energy E=KE+PE invariance of Coulomb: F(r)=-GMm/r2 (Derived in Unit 5)

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx = acosω t ⋅ bω cosω t( )− bsinω t ⋅ −aω sinω t( ) = ab ⋅ω cos2ω t + sin2ω t( )
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Unit 1 Fig. 11.8
Some Kepler’s “laws” for central (isotropic) force F(r) ...and certainly apply to the IHO: F(r)=-k·r with U(r)=k·r2/2
for IHO
vx
vy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω sinω tbω cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟
rxry
⎛
⎝⎜⎜
⎞
⎠⎟⎟= x
y
⎛
⎝⎜
⎞
⎠⎟ =
acosω tbsinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(Recall from Lecture 6: k = Gm 4π
3ρ⊕ )

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx = acosω t ⋅ bω cosω t( )− asinω t ⋅ −bω sinω t( ) = ab ⋅ω
2. Angular momentum L = mr × v is conserved
L = m |r × v |= m rxvy − ryvx( ) = m ⋅ab ⋅ω
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Unit 1 Fig. 11.8
Some Kepler’s “laws” that apply to any central (isotropic) force F(r) ...and certainly apply to the IHO: F(r)=-k·r with U(r)=k·r2/2
for IHO
for IHO
rv
|r×v| =r·v·sin!rv
(Recall from Lecture 6: k = Gm 4π
3ρ⊕ )

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx = acosω t ⋅ bω cosω t( )− asinω t ⋅ −bω sinω t( ) = ab ⋅ω2. Angular momentum L = mr × v is conserved
L = m |r × v |= m rxvy − ryvx( ) = m ⋅ab ⋅ω
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Unit 1 Fig. 11.8
Some Kepler’s “laws” that apply to any central (isotropic) force F(r) ...and certainly apply to the IHO: F(r)=-k·r with U(r)=k·r2/2
for IHO
for IHO
3. Equal area is swept by radius vector in each equal time interval T
AT =r × dr
20
T
∫ =r × dr
dt2
dt0
T
∫ = r × v2
dt0
T
∫ = L2m
dt0
T
∫ = L2m
T for IHO
by 2.
rdr
|r×dr| =r·dr·sin!rdr
(Recall from Lecture 6: k = Gm 4π
3ρ⊕ )

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx = acosω t ⋅ bω cosω t( )− asinω t ⋅ −bω sinω t( ) = ab ⋅ω2. Angular momentum L = mr × v is conserved
L = mr × v = m rxvy − ryvx( ) = m ⋅ab ⋅ω = m ⋅ab ⋅ 2πτ
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Unit 1 Fig. 11.8
Some Kepler’s “laws” that apply to any central (isotropic) force F(r) ...and certainly apply to the IHO: F(r)=-k·r with U(r)=k·r2/2
for IHO
for IHO
3. Equal area is swept by radius vector in each equal time interval T
AT =r × dr
20
T
∫ =r × dr
dt2
dt0
T
∫ = r × v2
dt0
T
∫ = L2m
dt0
T
∫ = L2m
T for IHO
In one period: τ= 1υ
= 2πω
= 2mAτ
L the area is: Aτ =
Lτ2m
( = ab ⋅π for ellipse orbit)
(Recall from Lecture 6: k = Gm 4π
3ρ⊕ )

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx = acosω t ⋅ bω cosω t( )− asinω t ⋅ −bω sinω t( ) = ab ⋅ω2. Angular momentum L = mr × v is conserved
L = mr × v = m rxvy − ryvx( ) = m ⋅ab ⋅ω = m ⋅ab ⋅ 2πτ
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Unit 1 Fig. 11.8
Some Kepler’s “laws” that apply to any central (isotropic) force F(r) ...and certainly apply to the IHO: F(r)=-k·r with U(r)=k·r2/2
for IHO
for IHO
3. Equal area is swept by radius vector in each equal time interval T
AT =r × dr
20
T
∫ =r × dr
dt2
dt0
T
∫ = r × v2
dt0
T
∫ = L2m
dt0
T
∫ = L2m
T for IHO
In one period: τ= 1υ
= 2πω
= 2mAτ
L the area is: Aτ =
Lτ2m
( = ab ⋅π for ellipse orbit)
( Recall from Lecture 6: ω = k /m = Gρ⊕4π / 3 )
(Recall from Lecture 6: k = Gm 4π
3ρ⊕ )
(IHO formulas from Lect. 6 p.70-79)

Some Kepler’s “laws” for all central (isotropic) force F(r) fields Angular momentum invariance of IHO: F(r)=-k·r with U(r)=k·r2/2 (Derived here) Angular momentum invariance of Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r (Derived in Unit 5) Total energy E=KE+PE invariance of IHO: F(r)=-k·r (Derived here) Total energy E=KE+PE invariance of Coulomb: F(r)=-GMm/r2 (Derived in Unit 5)

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx =ab ⋅ Gρ⊕4π / 3 for IHO
a−1/2b GM⊕ for Coul.
⎧⎨⎪
⎩⎪
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Some Kepler’s “laws” that apply to any central (isotropic) force F(r) Apply to IHO: F(r)=-k·r with U(r)=k·r2/2 and Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r
for IHO
t = 0 vv
r rrba
v
vrCoulomb:
IHO:
for Coul.(Derived in Unit 5)
(IHO formulas from Lect. 6 p.70-79)

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx =ab ⋅ Gρ⊕4π / 3 for IHO
a−1/2b GM⊕ for Coul.
⎧⎨⎪
⎩⎪2. Angular momentum L = mr × v is conserved
L = mr × v = m rxvy − ryvx( ) = m·ab ⋅ Gρ⊕4π / 3 for IHO
m·a−1/2b GM⊕ for Coul.
⎧⎨⎪
⎩⎪
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Some Kepler’s “laws” that apply to any central (isotropic) force F(r) Apply to IHO: F(r)=-k·r with U(r)=k·r2/2 and Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r
for IHO
for IHO
t = 0 vv
r rrba
v
vrCoulomb:
IHO:
for Coul.
for Coul.
(Derived in Unit 5)
(... in Unit 5)
(IHO formulas from Lect. 6 p.70-79)

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx =ab ⋅ Gρ⊕4π / 3 for IHO
a−1/2b GM⊕ for Coul.
⎧⎨⎪
⎩⎪2. Angular momentum L = mr × v is conserved
L = mr × v = m rxvy − ryvx( ) = m·ab ⋅ Gρ⊕4π / 3 for IHO
m·a−1/2b GM⊕ for Coul.
⎧⎨⎪
⎩⎪
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Some Kepler’s “laws” that apply to any central (isotropic) force F(r) Apply to IHO: F(r)=-k·r with U(r)=k·r2/2 and Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r
for IHO
for IHO
3. Equal area is swept by radius vector in each equal time interval T
τ= 1υ= 2πω
= 2mAτ
L= 2m·ab ⋅π
L=
2m·ab ⋅πm·ab ⋅ Gρ⊕4π / 3
2m·ab ⋅πm·a−1/2b GM⊕
⎧
⎨
⎪⎪
⎩
⎪⎪
t = 0 vv
r rrba
v
vrCoulomb:
IHO:
for Coul.
for Coul.
In one period:
Applies to any central
F(r)
Applies to IHO and Coulomb
(Derived in Unit 5)
(... in Unit 5)
(IHO formulas from Lect. 6 p.70-79)

1. Area of triangle ! rv = r × v/2 is constant
r × v = rxvy − ryvx =ab ⋅ Gρ⊕4π / 3 for IHO
a−1/2b GM⊕ for Coul.
⎧⎨⎪
⎩⎪2. Angular momentum L = mr × v is conserved
L = mr × v = m rxvy − ryvx( ) = m·ab ⋅ Gρ⊕4π / 3 for IHO
m·a−1/2b GM⊕ for Coul.
⎧⎨⎪
⎩⎪
t = 0 t = π/3ω t = π/2ωv=a ωv=b ω
r rr
ba
Some Kepler’s “laws” that apply to any central (isotropic) force F(r) Apply to IHO: F(r)=-k·r with U(r)=k·r2/2 and Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r
for IHO
for IHO
3. Equal area is swept by radius vector in each equal time interval T
τ= 1υ= 2πω
= 2mAτ
L= 2m·ab ⋅π
L=
2m·ab ⋅πm·ab ⋅ Gρ⊕4π / 3
= 2πGρ⊕4π / 3
for IHO
2m·ab ⋅πm·a−1/2b GM⊕
= 2πa−3/2 GM⊕
for Coul.
⎧
⎨
⎪⎪
⎩
⎪⎪
t = 0 vv
r rrba
v
vrCoulomb:
IHO:
for Coul.
for Coul.
In one period:
that is ωIHO
that is ωCoul
Applies to any central
F(r)
Applies to IHO and Coulomb
(not a function of b)
(Derived in Unit 5)
(... in Unit 5)
(not a function of a or b)

Some Kepler’s “laws” for all central (isotropic) force F(r) fields Angular momentum invariance of IHO: F(r)=-k·r with U(r)=k·r2/2 (Derived here) Angular momentum invariance of Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r (Derived in Unit 5) Total energy E=KE+PE invariance of IHO: F(r)=-k·r (Derived here) Total energy E=KE+PE invariance of Coulomb: F(r)=-GMm/r2 (Derived in Unit 5)

Kepler laws involve !-momentum conservation in isotropic force F(r) Now consider orbital energy conservation of the IHO: F(r)=-k·r with U(r)=k·r2/2
Total energy=KE+PE is constant
KE + PE = 12v iM i v + 1
2r iK i r
= 12
vx vy( )• m 00 m
⎛⎝⎜
⎞⎠⎟•
vxvy
⎛
⎝⎜⎜
⎞
⎠⎟⎟+ rx ry( )• k 0
0 k⎛⎝⎜
⎞⎠⎟•
rxry
⎛
⎝⎜⎜
⎞
⎠⎟⎟
= 12mv2
x + 12mv2
y + 12kr2
x + 12kr2
y
= 12m(−aω sinω t)2 + 1
2m(bω cosω t)2 + 1
2k(acosω t)2 + 1
2k(bsinω t)2
vx
vy
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
−aω sinω tbω cosω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟
rxry
⎛
⎝⎜⎜
⎞
⎠⎟⎟= x
y
⎛
⎝⎜
⎞
⎠⎟ =
acosω tbsinω t
⎛
⎝⎜⎜
⎞
⎠⎟⎟

Kepler laws involve !-momentum conservation in isotropic force F(r) Now consider orbital energy conservation of the IHO: F(r)=-k·r with U(r)=k·r2/2
Total IHO energy=KE+PE is constant
KE + PE = 12v iM i v + 1
2r iK i r
= 12
vx vy( )• m 00 m
⎛⎝⎜
⎞⎠⎟•
vxvy
⎛
⎝⎜⎜
⎞
⎠⎟⎟+ rx ry( )• k 0
0 k⎛⎝⎜
⎞⎠⎟•
rxry
⎛
⎝⎜⎜
⎞
⎠⎟⎟
= 12mv2
x + 12mv2
y + 12kr2
x + 12kr2
y
= 12m(−aω sinω t)2 + 1
2m(bω cosω t)2 + 1
2k(acosω t)2 + 1
2k(bsinω t)2
= 12ma2ω 2 (sin2ω t) + 1
2mb2ω 2 (cos2ω t)2 + 1
2ka2 (cos2ω t) + 1
2kb2 (sin2ω t)
= 12mω 2 (a2 + b2 ) Given : k = mω 2

= 12ma2ω 2 (sin2ω t) + 1
2mb2ω 2 (cos2ω t)2 + 1
2ka2 (cos2ω t) + 1
2kb2 (sin2ω t)
= 12mω 2 (a2 + b2 ) Given : k = mω 2
E = KE + PE = 12mω 2 (a2 + b2 ) = 1
2k(a2 + b2 ) since: ω = k
m = Gρ⊕4π / 3 or: mω 2 = k
Kepler laws involve !-momentum conservation in isotropic force F(r) Now consider orbital energy conservation of the IHO: F(r)=-k·r with U(r)=k·r2/2
Total IHO energy=KE+PE is constant
KE + PE = 12v iM i v + 1
2r iK i r
= 12
vx vy( )• m 00 m
⎛⎝⎜
⎞⎠⎟•
vxvy
⎛
⎝⎜⎜
⎞
⎠⎟⎟+ rx ry( )• k 0
0 k⎛⎝⎜
⎞⎠⎟•
rxry
⎛
⎝⎜⎜
⎞
⎠⎟⎟
= 12mv2
x + 12mv2
y + 12kr2
x + 12kr2
y
= 12m(−aω sinω t)2 + 1
2m(bω cosω t)2 + 1
2k(acosω t)2 + 1
2k(bsinω t)2
(IHO formulas from Lect. 6 p.70-79)

Some Kepler’s “laws” for all central (isotropic) force F(r) fields Angular momentum invariance of IHO: F(r)=-k·r with U(r)=k·r2/2 (Derived here) Angular momentum invariance of Coulomb: F(r)=-GMm/r2 with U(r)=-GMm·/r (Derived in Unit 5) Total energy E=KE+PE invariance of IHO: F(r)=-k·r (Derived here) Total energy E=KE+PE invariance of Coulomb: F(r)=-GMm/r2 (Derived in Unit 5)

Kepler laws involve !-momentum conservation in isotropic force F(r) Now consider orbital energy conservation of the IHO: F(r)=-k·r with U(r)=k·r2/2
We'll see that the Coul. orbits are simpler: (like the period...not a function of b)
Total IHO energy=KE+PE is constant
KE + PE = 12v iM i v + 1
2r iK i r
= 12
vx vy( )• m 00 m
⎛⎝⎜
⎞⎠⎟•
vxvy
⎛
⎝⎜⎜
⎞
⎠⎟⎟+ rx ry( )• k 0
0 k⎛⎝⎜
⎞⎠⎟•
rxry
⎛
⎝⎜⎜
⎞
⎠⎟⎟
= 12mv2
x + 12mv2
y + 12kr2
x + 12kr2
y
= 12m(−aω sinω t)2 + 1
2m(bω cosω t)2 + 1
2k(acosω t)2 + 1
2k(bsinω t)2
= 12ma2ω 2 (sin2ω t) + 1
2mb2ω 2 (cos2ω t)2 + 1
2ka2 (cos2ω t) + 1
2kb2 (sin2ω t)
= 12mω 2 (a2 + b2 ) Given : k = mω 2
E = KE + PE = 12mω 2 (a2 + b2 ) = 1
2k(a2 + b2 ) since: ω = k
m = Gρ⊕4π / 3 or: mω 2 = k
(IHO formulas from Lect. 6 p.70-79)

Kepler laws involve !-momentum conservation in isotropic force F(r) Now consider orbital energy conservation of the IHO: F(r)=-k·r with U(r)=k·r2/2
We'll see that the Coul. orbits are simpler: (like the period...not a function of b)
E = KE + PE = 12mv2
x +12mv2
y −kr= 1
2mv2
x +12mv2
y −GM⊕m
r= −GM⊕m
a
Total IHO energy=KE+PE is constant
KE + PE = 12v iM i v + 1
2r iK i r
= 12
vx vy( )• m 00 m
⎛⎝⎜
⎞⎠⎟•
vxvy
⎛
⎝⎜⎜
⎞
⎠⎟⎟+ rx ry( )• k 0
0 k⎛⎝⎜
⎞⎠⎟•
rxry
⎛
⎝⎜⎜
⎞
⎠⎟⎟
= 12mv2
x + 12mv2
y + 12kr2
x + 12kr2
y
= 12m(−aω sinω t)2 + 1
2m(bω cosω t)2 + 1
2k(acosω t)2 + 1
2k(bsinω t)2
= 12ma2ω 2 (sin2ω t) + 1
2mb2ω 2 (cos2ω t)2 + 1
2ka2 (cos2ω t) + 1
2kb2 (sin2ω t)
= 12mω 2 (a2 + b2 ) Given : k = mω 2
E = KE + PE = 12mω 2 (a2 + b2 ) = 1
2k(a2 + b2 ) since: ω = k
m = Gρ⊕4π / 3 or: mω 2 = k

Introduction to dual matrix operator contact geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation

Quadratic forms and tangent contact geometry of their ellipses
r •Q• r = 1
x y( )•1
a20
0 1
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
• xy
⎛
⎝⎜
⎞
⎠⎟ = 1= x y( )•
x
a2
y
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
= x2
a2+ y2
b2
A inverse matrix Q-1 generates an ellipse by p•Q -1•p=1 called inverse or dual ellipse:
p•Q−1•p = 1
px py( )• a2 0
0 b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟•
px
py
⎛
⎝⎜⎜
⎞
⎠⎟⎟= 1= px py( )• a2 px
b2 py
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟= a2 px
2 + b2 py2
Q• r
r
Q−1•p
p
A matrix Q that generates an ellipse by r•Q•r=1 is called positive-definite (if r•Q•r always >0)

Quadratic forms and tangent contact geometry of their ellipsesA matrix Q that generates an ellipse by r•Q•r=1 is called positive-definite (if r•Q•r always >0)
r •Q• r = 1
x y( )•1
a20
0 1
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
• xy
⎛
⎝⎜
⎞
⎠⎟ = 1= x y( )•
x
a2
y
b2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
= x2
a2+ y2
b2
A inverse matrix Q-1 generates an ellipse by p•Q -1•p=1 called inverse or dual ellipse:
p•Q−1•p = 1
px py( )• a2 0
0 b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟•
px
py
⎛
⎝⎜⎜
⎞
⎠⎟⎟= 1= px py( )• a2 px
b2 py
⎛
⎝
⎜⎜⎜
⎞
⎠
⎟⎟⎟= a2 px
2 + b2 py2
Q• r = p
r
Q−1•p = r
p
Defined mapping between ellipses

Introduction to dual matrix operator contact geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation

r(φ)
φ=ω t
ab
b-circle
a-circle
Original ellipse
r•Q•r = r•p = 1
Inverse ellipse
p•Q-1•p =p•r = 1
p(φ)
(a) Quadratic form ellipse and
Inverse quadratic form ellipse
p = Q• r
r = Q−1•p
Defined mapping between ellipses
Q
Q-1
based on Unit 1
Fig. 11.6

r(φ)
φ=ω t
ab
b-circle
a-circle
Original ellipse
r•Q•r = r•p = 1
Inverse ellipse
p•Q-1•p =p•r = 1
p(φ)
(a) Quadratic form ellipse and
Inverse quadratic form ellipse
p = Q• r
r = Q−1•p
Defined mapping between ellipses
Q
Q-1
based on Unit 1
Fig. 11.6
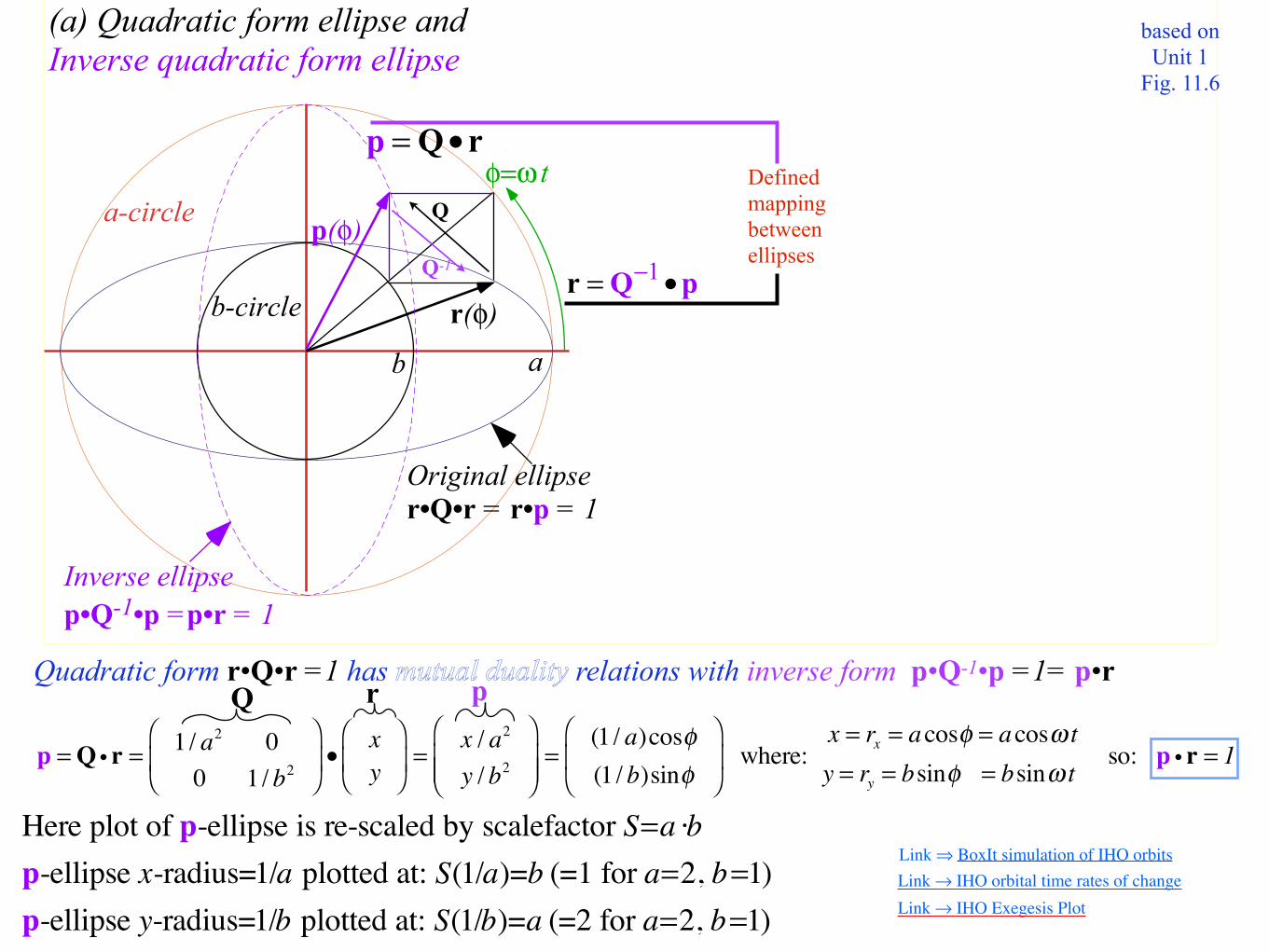
Here plot of p-ellipse is re-scaled by scalefactor S=a ·bp-ellipse x-radius=1/a plotted at: S(1/a)=b (=1 for a=2, b=1)p-ellipse y-radius=1/b plotted at: S(1/b)=a (=2 for a=2, b=1)
Introduction to dual matrix operator geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation

r(φ)
φ=ω t
ab
b-circle
a-circle
Original ellipse
r•Q•r = r•p = 1
Inverse ellipse
p•Q-1•p =p•r = 1
p(φ)
(a) Quadratic form ellipse and
Inverse quadratic form ellipse
Quadratic form r•Q•r =1 has mutual duality relations with inverse form p•Q-1•p =1= p•r
p = Q• r
r = Q−1•p
Defined mapping between ellipses
Q
Q-1
based on Unit 1
Fig. 11.6
Here plot of p-ellipse is re-scaled by scalefactor S=a ·bp-ellipse x-radius=1/a plotted at: S(1/a)=b (=1 for a=2, b=1)p-ellipse y-radius=1/b plotted at: S(1/b)=a (=2 for a=2, b=1)
r(φ)
φ=ω t
ab
b-circle
a-circle
Original ellipse
r•Q•r = r•p = 1
Inverse ellipse
p•Q-1•p =p•r = 1
p(φ)
(a) Quadratic form ellipse and
Inverse quadratic form ellipse
Quadratic form r•Q•r =1 has mutual duality relations with inverse form p•Q-1•p =1= p•r
p =Q i r = 1/ a2 00 1/ b2
⎛
⎝⎜
⎞
⎠⎟ •
xy
⎛
⎝⎜
⎞
⎠⎟ =
x / a2
y / b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
(1 / a)cosφ(1 / b)sinφ
⎛
⎝⎜
⎞
⎠⎟ where:
x = rx = acosφ = acosω ty = ry = bsinφ = bsinω t
so: p i r = 1
p = Q• r
r = Q−1•p
Defined mapping between ellipses
Q
Q-1
based on Unit 1
Fig. 11.6
r pQ
Here plot of p-ellipse is re-scaled by scalefactor S=a ·bp-ellipse x-radius=1/a plotted at: S(1/a)=b (=1 for a=2, b=1)p-ellipse y-radius=1/b plotted at: S(1/b)=a (=2 for a=2, b=1)
Link → IHO orbital time rates of change Link → IHO Exegesis Plot
Link ⇒ BoxIt simulation of IHO orbits
https://modphys.hosted.uark.edu/markup/RelaWavityWeb.html?plotType=1,0&semiMajor=1.0&semiMinor=0.125

Introduction to dual matrix operator geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation
Quadratic form r•Q•r =1 has mutual duality relations with inverse form p•Q-1•p =1= p•r
p =Q i r = 1/ a2 00 1/ b2
⎛
⎝⎜
⎞
⎠⎟ •
xy
⎛
⎝⎜
⎞
⎠⎟ =
x / a2
y / b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
(1 / a)cosφ(1 / b)sinφ
⎛
⎝⎜
⎞
⎠⎟ where:
x = rx = acosφ = acosω ty = ry = bsinφ = bsinω t
so: p i r = 1
r(φ)
φ=ω t
ab
b-circle
a-circle
r(φ)ab
r(φ)=r(φ+π/2)•
r(φ)•r(φ)
Original ellipse
r•Q•r = r•p = 1
p(φ)
Inverse ellipse
p•Q-1•p =p•r = 1
p(φ)
(a) Quadratic form ellipse and
Inverse quadratic form ellipse
(b) Ellipse tangents
r(φ)•
φ=ω tQ
Q-1
based on Unit 1
Fig. 11.6
Here plot of p-ellipse is re-scaled by scalefactor S=a ·bp-ellipse x-radius=1/a plotted at: S(1/a)=b (=1 for a=2, b=1)p-ellipse y-radius=1/b plotted at: S(1/b)=a (=2 for a=2, b=1)

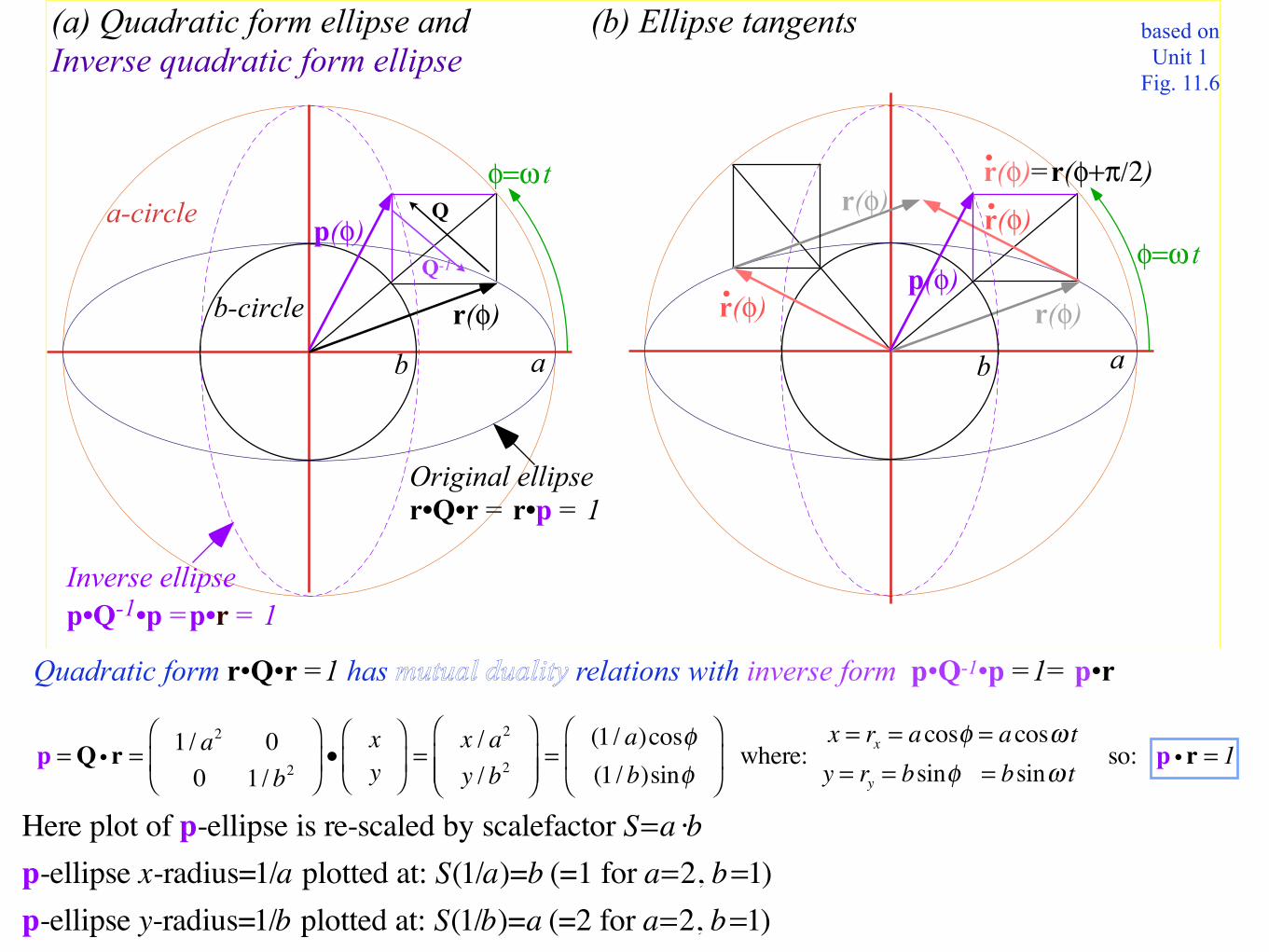
!r •p = 0 = !rx !ry( )• pxpy
⎛
⎝⎜⎜
⎞
⎠⎟⎟= −asinφ bcosφ( )• (1 / a)cosφ
(1 / b)sinφ
⎛
⎝⎜
⎞
⎠⎟ where:
!rx = −asinφ!ry = bcosφ
and:px = (1 / a)cosφ py = (1 / b)sinφ
Quadratic form r•Q•r =1 has mutual duality relations with inverse form p•Q-1•p =1= p•r
p =Q i r = 1/ a2 00 1/ b2
⎛
⎝⎜
⎞
⎠⎟ •
xy
⎛
⎝⎜
⎞
⎠⎟ =
x / a2
y / b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
(1 / a)cosφ(1 / b)sinφ
⎛
⎝⎜
⎞
⎠⎟ where:
x = rx = acosφ = acosω ty = ry = bsinφ = bsinω t
so: p i r = 1
r(φ)
φ=ω t
ab
b-circle
a-circle
r(φ)ab
r(φ)=r(φ+π/2)•
r(φ)•r(φ)
Original ellipse
r•Q•r = r•p = 1
p(φ)
vector p(φ) isperpendicular
to r(φ)•Inverse ellipse
p•Q-1•p =p•r = 1
p(φ)
(a) Quadratic form ellipse and
Inverse quadratic form ellipse
(b) Ellipse tangents
r(φ)•
φ=ω t
p is perpendicular to velocity v=r , a mutual orthogonality•
•
Q
Q-1
based on Unit 1
Fig. 11.6

p =Q i r = 1/ a2 00 1/ b2
⎛
⎝⎜
⎞
⎠⎟ •
xy
⎛
⎝⎜
⎞
⎠⎟ =
x / a2
y / b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟=
(1 / a)cosφ(1 / b)sinφ
⎛
⎝⎜
⎞
⎠⎟ where:
x = rx = acosφ = acosω ty = ry = bsinφ = bsinω t
so: p i r = 1
!r •p = 0 = !rx !ry( )• pxpy
⎛
⎝⎜⎜
⎞
⎠⎟⎟= −asinφ bcosφ( )• (1 / a)cosφ
(1 / b)sinφ
⎛
⎝⎜
⎞
⎠⎟ where:
!rx = −asinφ!ry = bcosφ
and:px = (1 / a)cosφ py = (1 / b)sinφ
Quadratic form r•Q•r =1 has mutual duality relations with inverse form p•Q-1•p =1unit
mutual projection
p is perpendicular to velocity v=r , a mutual orthogonality. So is r perpendicular to p: p•r=0•
Unit 1 Fig. 11.6
r(φ)
φ=ω t
ab
b-circle
a-circle
r(φ)ab
r(φ)=r(φ+π/2)•
r(φ)•r(φ)
Original ellipse
r•Q•r = r•p = 1
p(φ)
p(φ)
p(φ)= p(φ+π/2)•
p(φ)•
vector p(φ) isperpendicular
to r(φ)•Inverse ellipse
p•Q-1•p =p•r = 1
p(φ)
(a) Quadratic form ellipse and
Inverse quadratic form ellipse
(b) Ellipse tangents
r(φ)•
φ=ω t
vector p(φ) isperpendicular
to r(φ)
•
• •
•
Q
Q-1

Geometry of dual ellipse Kepler anomalies for vectors [r(φ), p(φ)] and d/dt[r(φ), p(φ),] in coordinate (x,y) space rendered by animation web-app in RelaWavity and described in Lect. 12-advanced.
RelaWavity Web Simulation Ellipse/Exegesis

Introduction to dual matrix operator geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation

Start with 45° unit vector v x/y = xy
⎛
⎝⎜
⎞
⎠⎟ =
1/ 2
1 / 2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
.
based on Fig. 11.7 in Unit 1Here b/a=1/2

Diagonal R-matrix acts on vector v x/y . Resulting vector has slope changed by factor a /b = 2.
R i v x/y =1/a 00 1/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/ay/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(Slope increases if a >b.)
Diagonal R−1-matrix acts on vector v x/y . Resulting vector has slope changed by factor b/a.
R−1 i v x/y = a 00 b
⎛⎝⎜
⎞⎠⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x ⋅ay ⋅b
⎛
⎝⎜
⎞
⎠⎟
(Slope decreases if b< a.)
based on Fig. 11.7 in Unit 1Here b/a=1/2
Action of “sqrt-1-”matrix R -1 =√Q -1
Action of “sqrt-”matrix R=√Q
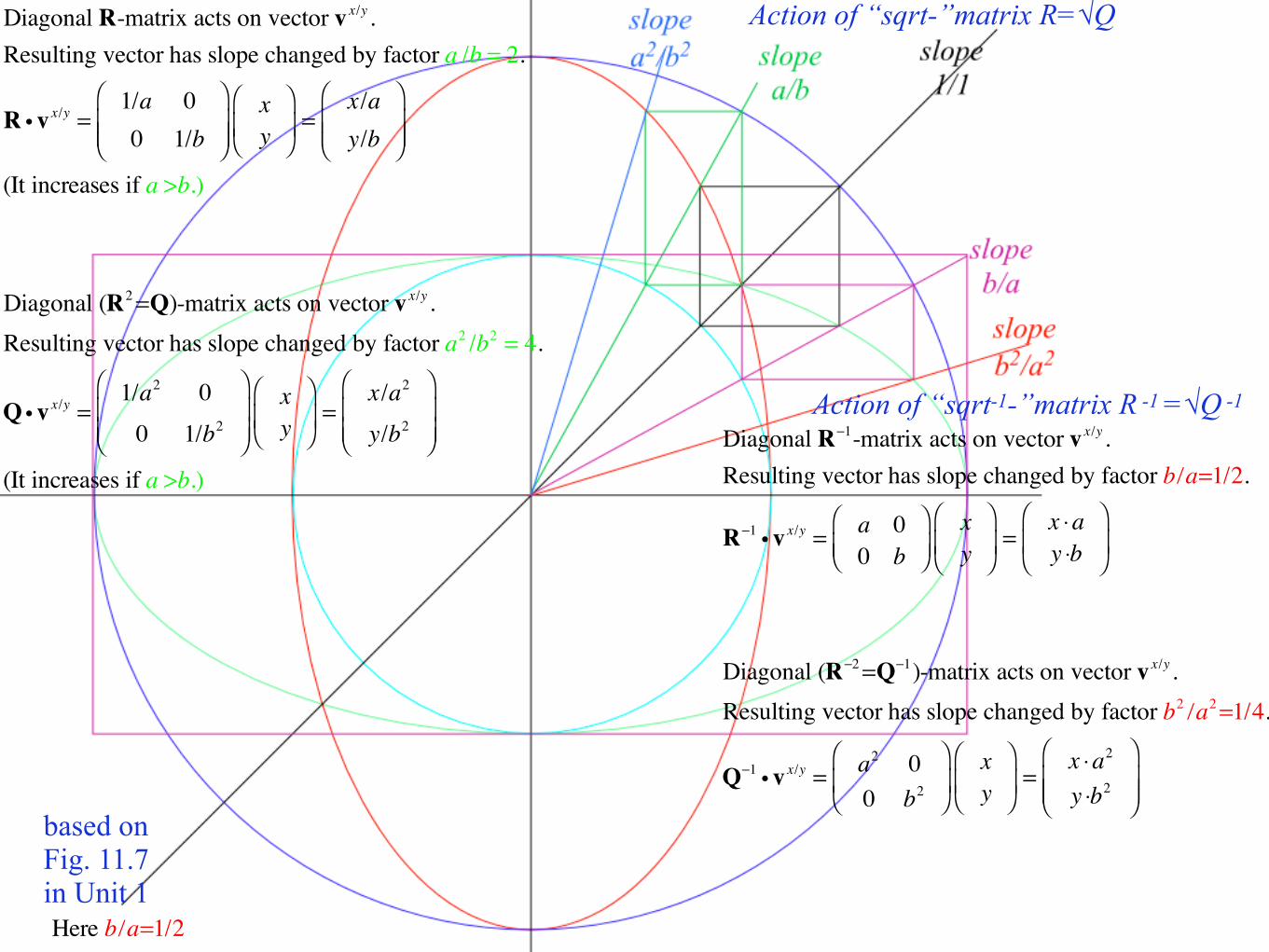
Diagonal (R2=Q)-matrix acts on vector v x/y . Resulting vector has slope changed by factor a2 /b2 = 4.
Q i v x/y =1/a2 0
0 1/b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/a2
y/b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(It increases if a >b.)
Diagonal (R−2=Q−1)-matrix acts on vector v x/y . Resulting vector has slope changed by factor b2 /a2=1/4.
Q−1 i v x/y = a2 00 b2
⎛
⎝⎜
⎞
⎠⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x ⋅a2
y ⋅b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
Diagonal R-matrix acts on vector v x/y . Resulting vector has slope changed by factor a /b = 2.
R i v x/y =1/a 00 1/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/ay/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(It increases if a >b.)
Diagonal R−1-matrix acts on vector v x/y . Resulting vector has slope changed by factor b/a=1/2.
R−1 i v x/y = a 00 b
⎛⎝⎜
⎞⎠⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x ⋅ay ⋅b
⎛
⎝⎜
⎞
⎠⎟
based on Fig. 11.7 in Unit 1Here b/a=1/2
Action of “sqrt-1-”matrix R -1 =√Q -1
Action of “sqrt-”matrix R=√Q

slope1/1
slopea/b
slopeb/aslopeb2/a2
slopea2/b2
slopeb3/a3
slopea3/b3
Diagonal (R2=Q)-matrix acts on vector v x/y . Resulting vector has slope changed by factor a2 /b2 = 4.
Q i v x/y =1/a2 0
0 1/b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/a2
y/b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(It increases if a >b.)
Diagonal R-matrix acts on vector v x/y . Resulting vector has slope changed by factor a /b = 2.
R i v x/y =1/a 00 1/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/ay/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(It increases if a >b.)
Either process can go on forever... Diagonal (R2n=Qn )-matrix acts on vector v x/y . Resulting vector has slope changed by factor a2n /b2n = 4n.
Either process can go on forever... Diagonal (R−2n=Q−n )-matrix acts on vector v x/y . Resulting vector has slope changed by factor b2n /a2n = 4−n.
based on Fig. 11.7 in Unit 1Here b/a=1/2

slope1/1
slopea/b
slopeb/aslopeb2/a2
slopea2/b2
slopeb3/a3
slopea3/b3
Diagonal (R2=Q)-matrix acts on vector v x/y . Resulting vector has slope changed by factor a2 /b2 = 4.
Q i v x/y =1/a2 0
0 1/b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/a2
y/b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(It increases if a >b.)
Diagonal R-matrix acts on vector v x/y . Resulting vector has slope changed by factor a /b = 2.
R i v x/y =1/a 00 1/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/ay/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(It increases if a >b.)
Either process can go on forever... Diagonal (R2n=Qn )-matrix acts on vector v x/y . Resulting vector has slope changed by factor a2n /b2n = 4n.
...Finally, the result approaches EIGENVECTOR y = 01
⎛⎝⎜
⎞⎠⎟
of ∞-slope which is "immune" to R , Q or Qn : R y = (1/b) y Qn y = (1/b2 )n y
Either process can go on forever... Diagonal (R−2n=Q−n )-matrix acts on vector v x/y . Resulting vector has slope changed by factor b2n /a2n = 4−n.
...Finally, the result approaches EIGENVECTOR x = 10
⎛⎝⎜
⎞⎠⎟
of 0-slope which is "immune" to R−1 , Q−1 or Q−n : R−1 x = (a) x Q−n x = (a2 )n x
EIGENVECTOR y
EIGENVECTOR x
Here b/a=1/2

slope1/1
slopea/b
slopeb/aslopeb2/a2
slopea2/b2
slopeb3/a3
slopea3/b3
Diagonal (R2=Q)-matrix acts on vector v x/y . Resulting vector has slope changed by factor a2 /b2 = 4.
Q i v x/y =1/a2 0
0 1/b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/a2
y/b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(It increases if a >b.)
Diagonal R-matrix acts on vector v x/y . Resulting vector has slope changed by factor a /b = 2.
R i v x/y =1/a 00 1/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
xy
⎛
⎝⎜
⎞
⎠⎟ =
x/ay/b
⎛
⎝⎜⎜
⎞
⎠⎟⎟
(It increases if a >b.)
Either process can go on forever... Diagonal (R2n=Qn )-matrix acts on vector v x/y . Resulting vector has slope changed by factor a2n /b2n = 4n.
...Finally, the result approaches EIGENVECTOR y = 01
⎛⎝⎜
⎞⎠⎟
of ∞-slope which is "immune" to R , Q or Qn : R y = (1/b) y Qn y = (1/b2 )n y
Either process can go on forever... Diagonal (R−2n=Q−n )-matrix acts on vector v x/y . Resulting vector has slope changed by factor b2n /a2n = 4−n.
...Finally, the result approaches EIGENVECTOR x = 10
⎛⎝⎜
⎞⎠⎟
of 0-slope which is "immune" to R−1 , Q−1 or Q−n : R−1 x = (a) x Q−n x = (a2 )n x
EIGENVECTOR y
EIGENVECTOR x
Eigensolution RelationsEigenvalues Eigenvalues
Here b/a=1/2

Introduction to dual matrix operator geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation
Start with 45° unit vector v x/y = xy
⎛
⎝⎜
⎞
⎠⎟ =
1/ 2
1 / 2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
.
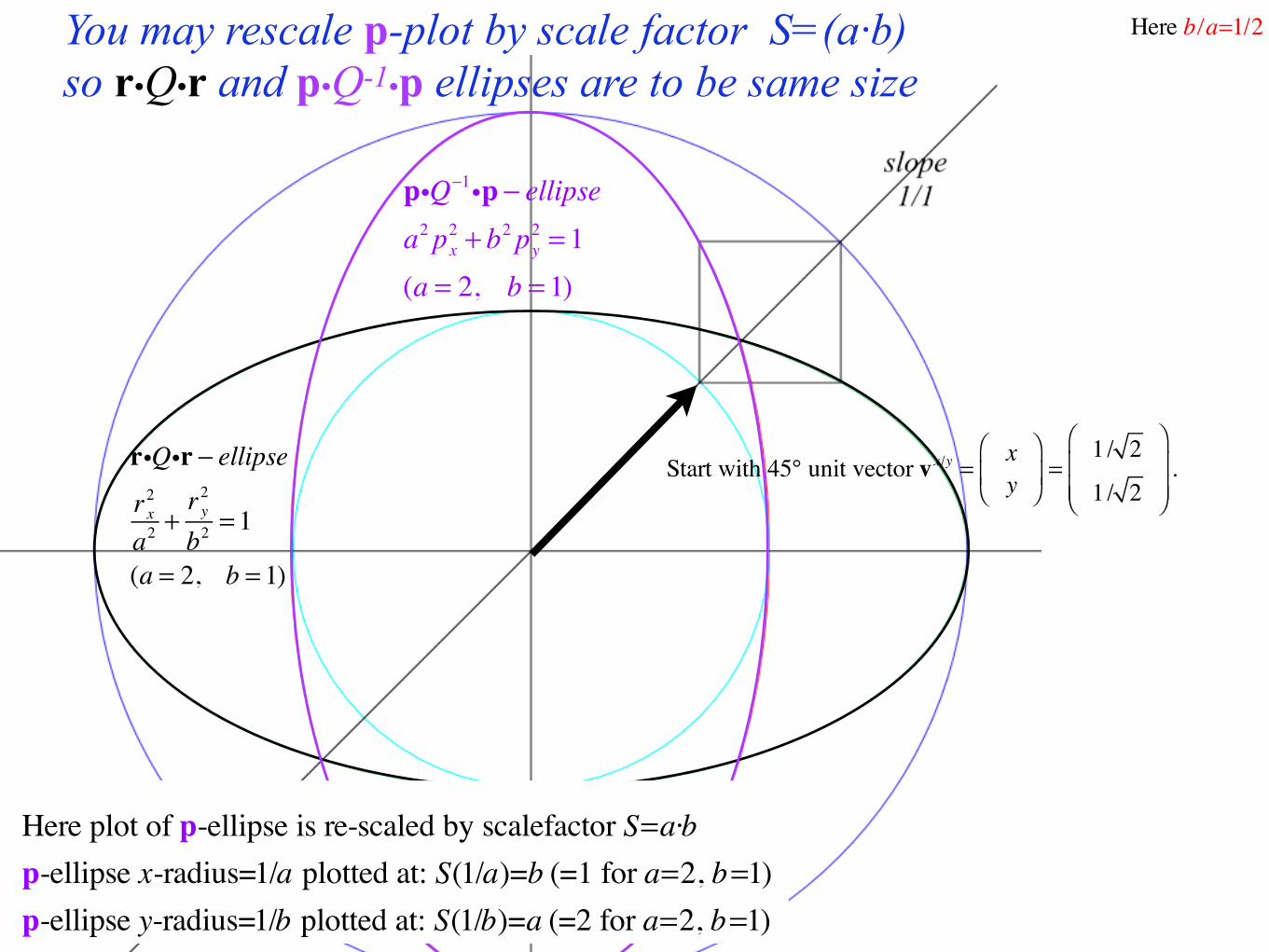
You may rescale p-plot by scale factor S=(a·b) so r•Q•r and p•Q-1•p ellipses are to be same size
riQir − ellipse
r2xa2
+r2yb2
= 1
(a = 2, b = 1)
piQ−1ip − ellipsea2p2x + b
2p2y = 1(a = 2, b = 1)
Here b/a=1/2
Here plot of p-ellipse is re-scaled by scalefactor S=a·bp-ellipse x-radius=1/a plotted at: S(1/a)=b (=1 for a=2, b=1)p-ellipse y-radius=1/b plotted at: S(1/b)=a (=2 for a=2, b=1)

Start with 45° unit vector v x/y = xy
⎛
⎝⎜
⎞
⎠⎟ =
1/ 2
1 / 2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
.
riQir − ellipse
r2xa2
+r2yb2
= 1
(a = 2, b = 1)
piQ−1ip − ellipsea2p2x + b
2p2y = 1(a = 2, b = 1)
1/a = 1/ 2
2
b = 1
a = 2
1/b = 1
Here b/a=1/2..or else rescale p-plot by scale factor S=b to separate r•Q•r and p•Q-1•p ellipses into different regions
Here plot of p-ellipse is re-scaled by scalefactor S=bp-ellipse x-radius=1/a plotted at: S(1/a)=b/a (=1/2 for a=2, b=1)p-ellipse y-radius=1/b plotted at: S(1/b)=1
|r|≥1 and |p|≤1

slopeb/a=1/2
r•Q•r-ellipserx2/a2+ry
2/b2=1(a = 2.0 , b = =1.0 )
p•Q-1•p-ellipsea2px
2+b2py2=1
(a = 2.0 , b = =1.0 )
b=1.0
p(φ1) = Q i r(φ−1)
= 1/ a2 0
0 1/ b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
acosφ0
bsinφ0
⎛
⎝⎜⎜
⎞
⎠⎟⎟
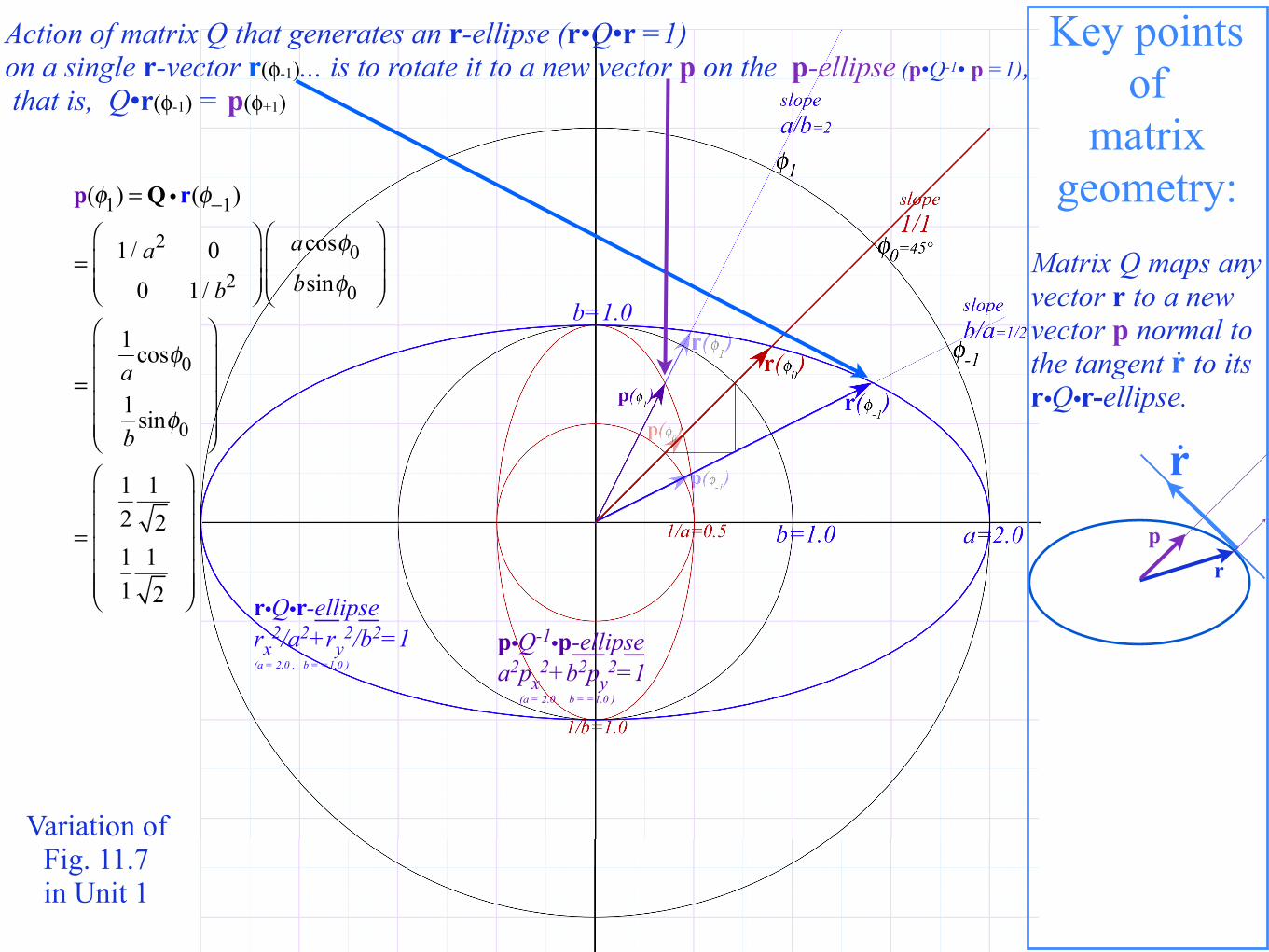
Action of matrix Q that generates an r-ellipse (r•Q• r =1) on a single r-vector r(φ-1)...
acosφ0
bsinφ0
r(φ-1)φ0
φ-1
a
b
Variation of Fig. 11.7 in Unit 1
Here plot of p-ellipse is re-scaled by scalefactor S=bp-ellipse x-radius=1/a plotted at: S(1/a)=b/a (=1/2 for a=2, b=1)p-ellipse y-radius=1/b plotted at: S(1/b)=1

slopeb/a=1/2
r•Q•r-ellipserx2/a2+ry
2/b2=1(a = 2.0 , b = =1.0 )
p•Q-1•p-ellipsea2px
2+b2py2=1
(a = 2.0 , b = =1.0 )
b=1.0
p(φ1) = Q i r(φ−1)
= 1/ a2 0
0 1/ b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
acosφ0
bsinφ0
⎛
⎝⎜⎜
⎞
⎠⎟⎟
=
1a
cosφ0
1b
sinφ0
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟
=
12
1
211
1
2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
Action of matrix Q that generates an r-ellipse (r•Q•r =1) on a single r-vector r(φ-1)... is to rotate it to a new vector p on the p-ellipse (p•Q-1• p =1), that is, Q•r(φ-1) = p(φ+1)
Variation of Fig. 11.7 in Unit 1
slopeb/a=1/2
r•Q•r-ellipserx2/a2+ry
2/b2=1(a = 2.0 , b = =1.0 )
p•Q-1•p-ellipsea2px
2+b2py2=1
(a = 2.0 , b = =1.0 )
b=1.0
p(φ1) = Q i r(φ−1)
= 1/ a2 0
0 1/ b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
acosφ0
bsinφ0
⎛
⎝⎜⎜
⎞
⎠⎟⎟
=
1a
cosφ0
1b
sinφ0
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟
=
12
1
211
1
2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
Action of matrix Q that generates an r-ellipse (r•Q•r =1) on a single r-vector r(φ-1)... is to rotate it to a new vector p on the p-ellipse (p•Q-1• p =1), that is, Q•r(φ-1) = p(φ+1)
Key points of
matrix geometry:
Matrix Q maps any vector r to a new vector p normal to the tangent to its r•Q•r-ellipse.
rp
!r
!r
Variation of Fig. 11.7 in Unit 1

slopeb/a=1/2
r•Q•r-ellipserx2/a2+ry
2/b2=1(a = 2.0 , b = =1.0 )
p•Q-1•p-ellipsea2px
2+b2py2=1
(a = 2.0 , b = =1.0 )
b=1.0
p(φ1) = Q i r(φ−1)
= 1/ a2 0
0 1/ b2
⎛
⎝⎜⎜
⎞
⎠⎟⎟
acosφ0
bsinφ0
⎛
⎝⎜⎜
⎞
⎠⎟⎟
=
1a
cosφ0
1b
sinφ0
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟
=
12
1
211
1
2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
Action of matrix Q that generates an r-ellipse (r•Q•r =1) on a single r-vector r(φ-1)... is to rotate it to a new vector p on the p-ellipse (p•Q-1• p =1), that is, Q•r(φ-1) = p(φ+1)
Key points of
matrix geometry:
Matrix Q maps any vector r to a new vector p normal to the tangent to its r•Q•r-ellipse.
rp
!r
!r
Matrix Q-1 maps p back to r that is normal to the tangent to its p• Q-1• p-ellipse.
!p
!p
!p
Variation of Fig. 11.7 in Unit 1

Introduction to dual matrix operator geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation

Derive matrix “normal-to-ellipse”geometry by vector calculus: Let matrix Q =
define the ellipse 1=r•Q•r =
A BB D
⎛⎝⎜
⎞⎠⎟
x y( ) i A BB D
⎛⎝⎜
⎞⎠⎟
ixy
⎛
⎝⎜
⎞
⎠⎟ = x y( ) i A ⋅ x + B ⋅ y
B ⋅ x + D ⋅ y
⎛
⎝⎜
⎞
⎠⎟ = A ⋅ x2 + 2B ⋅ xy + D ⋅ y2 = 1
rp
!rrp
!r
B = 0 B ≠ 0

Derive matrix “normal-to-ellipse”geometry by vector calculus: Let matrix Q =
define the ellipse 1=r•Q•r =
Compare operation by Q on vector r with vector derivative or gradient of r•Q•r
A BB D
⎛⎝⎜
⎞⎠⎟
x y( ) i A BB D
⎛⎝⎜
⎞⎠⎟
ixy
⎛
⎝⎜
⎞
⎠⎟ = x y( ) i A ⋅ x + B ⋅ y
B ⋅ x + D ⋅ y
⎛
⎝⎜
⎞
⎠⎟ = A ⋅ x2 + 2B ⋅ xy + D ⋅ y2 = 1
rp
!rrp
!r
A BB D
⎛⎝⎜
⎞⎠⎟
ixy
⎛
⎝⎜
⎞
⎠⎟ =
A ⋅ x + B ⋅ yB ⋅ x + D ⋅ y
⎛
⎝⎜
⎞
⎠⎟
∂∂rr iQ i r( ) = ∇ r iQ i r( )
∂∂x∂∂y
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟
A ⋅ x2 + 2B ⋅ xy + D ⋅ y2( ) = 2A ⋅ x + 2B ⋅ y2B ⋅ x + 2D ⋅ y
⎛
⎝⎜
⎞
⎠⎟
B = 0 B ≠ 0

Derive matrix “normal-to-ellipse”geometry by vector calculus: Let matrix Q =
define the ellipse 1=r•Q•r =
Compare operation by Q on vector r with vector derivative or gradient of r•Q•r
A BB D
⎛⎝⎜
⎞⎠⎟
x y( ) i A BB D
⎛⎝⎜
⎞⎠⎟
ixy
⎛
⎝⎜
⎞
⎠⎟ = x y( ) i A ⋅ x + B ⋅ y
B ⋅ x + D ⋅ y
⎛
⎝⎜
⎞
⎠⎟ = A ⋅ x2 + 2B ⋅ xy + D ⋅ y2 = 1
rp
!rrp
!r
Very simple result:
A BB D
⎛⎝⎜
⎞⎠⎟
ixy
⎛
⎝⎜
⎞
⎠⎟ =
A ⋅ x + B ⋅ yB ⋅ x + D ⋅ y
⎛
⎝⎜
⎞
⎠⎟
∂∂rr iQ i r( ) = ∇ r iQ i r( )
∂∂x∂∂y
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟
A ⋅ x2 + 2B ⋅ xy + D ⋅ y2( ) = 2A ⋅ x + 2B ⋅ y2B ⋅ x + 2D ⋅ y
⎛
⎝⎜
⎞
⎠⎟
∂∂r
r iQ i r2
⎛⎝⎜
⎞⎠⎟ = ∇ r iQ i r
2⎛⎝⎜
⎞⎠⎟ =Q i r
B = 0 B ≠ 0
Introduction to dual matrix operator geometry (based on IHO orbits) Quadratic form ellipse r•Q•r=1 vs.inverse form ellipse p•Q -1•p=1
Duality norm relations ( r•p=1) Q-Ellipse tangents r′ normal to dual Q -1-ellipse position p ( r′•p=0=r•p′)
(Still more) Operator geometric sequences and eigenvectors Alternative scaling of matrix operator geometry
Vector calculus of tensor operation

slopeb/a=1/2
r•Q•r-ellipserx2/a2+ry
2/b2=1(a = 2.0 , b = =1.0 )
p•Q-1•p-ellipsea2px
2+b2py2=1
(a = 2.0 , b = =1.0 )
b=1.0
u = Q i r(φ−1) = R i r(φ−1)
= 1/ a 00 1/ b
⎛
⎝⎜⎞
⎠⎟acosφ0
bsinφ0
⎛
⎝⎜⎜
⎞
⎠⎟⎟
=
1a
acosφ0
1b
bsinφ0
⎛
⎝
⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟
=cosφ0
sinφ0
⎛
⎝⎜⎜
⎞
⎠⎟⎟
=
1
21
2
⎛
⎝
⎜⎜⎜⎜⎜
⎞
⎠
⎟⎟⎟⎟⎟
Action of “sqrt-”matrix R=√Q (R generates another ellipse r•R•r =1 not shown) on a single r-vector r(φ-1)... is to rotate it to u-circle (u•u =1), that is, R•r(φ-1) = u =(const.)r(φ0)
a unit vector on unit-circle
u
Variation of Fig. 11.7 in Unit 1

slopeb2/a2
As before, these processes may be continued indefinitely.
Variation of Fig. 11.7 in Unit 1

slopeb2/a2
...And includes a cool way to construct those tangents ... etc. (see exercises!)
!r(φ−2 )
!r(φ−2 )
!p(φ1)
!p(φ1)
Variation of Fig. 11.7 in Unit 1
Q:Where is this headed? A: Lagrangian-Hamiltonian duality Preview of Lecture 8

(a) Lagrangian L = L(v1,v2)
v1
v2(b) Estrangian E = E(V1,V2)
V1=√m1v1
(c) Hamiltonian H = H(p1,p2)
p1=m1v1
p2=m2v2
V2=√m2v2
COM Bisectorslope = 1/1
Collision line andCOM tangent slope= -m1/m2 =-16
Collision line andCOM tangent slope=-√m1/√m2=-4
COM Bisector slope= √m2/√m1 =1/4
Collision line andCOM tangent slope
= -1/1
COM Bisector slope= m2/m1 =1/16
slope√m1√m2
=4
slope=1
The R and Q matrix transformations are like the mechanics rescaling matrices √M and M: Like Q=R2: Like √Q=R: Like Q-1=R-2:
M =m1 00 m2
⎛
⎝⎜⎜
⎞
⎠⎟⎟= R2
M =m1 0
0 m2
⎛
⎝⎜⎜
⎞
⎠⎟⎟= R M−1 =
1/m1 00 1 /m2
⎛
⎝⎜⎜
⎞
⎠⎟⎟= R−2
Unit 1 Fig. 12.1
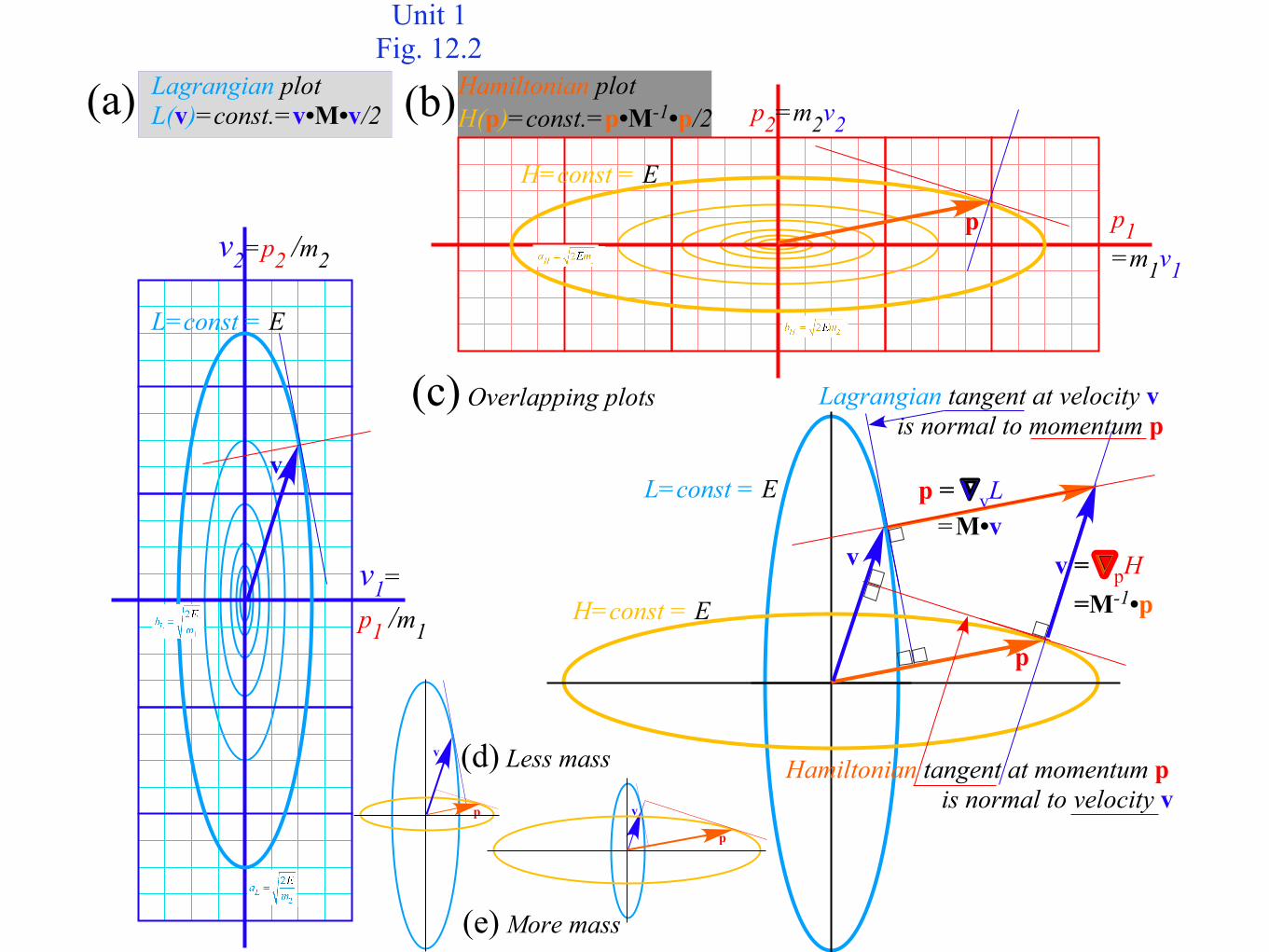
p2=m2v2
p1=m1v1
Hamiltonian plotH(p)=const.=p•M-1•p/2(b)Lagrangian plot
L(v)=const.=v•M•v/2
v2=p2 /m2
L=const = E
v1=p1 /m1
(a)
v v = ∇∇pH=M-1•p
p = ∇∇vL=M•v
p
Lagrangian tangent at velocity vis normal to momentum p
Hamiltonian tangent at momentum pis normal to velocity v
(c) Overlapping plotsv
p
v
p
p
v (d) Less mass
(e) More mass
H=const = E
L=const = E
H=const = E
Unit 1 Fig. 12.2

AMOP reference links (Updated list given on 2nd and 3rd pages of each class presentation)
Representaions Of Multidimensional Symmetries In Networks - harter-jmp-1973Alternative Basis for the Theory of Complex Spectra
Alternative_Basis_for_the_Theory_of_Complex_Spectra_I_-_harter-pra-1973Alternative_Basis_for_the_Theory_of_Complex_Spectra_II_-_harter-patterson-pra-1976Alternative_Basis_for_the_Theory_of_Complex_Spectra_III_-_patterson-harter-pra-1977
Frame Transformation Relations And Multipole Transitions In Symmetric Polyatomic Molecules - RMP-1978Asymptotic eigensolutions of fourth and sixth rank octahedral tensor operators - Harter-Patterson-JMP-1979Rotational energy surfaces and high- J eigenvalue structure of polyatomic molecules - Harter - Patterson - 1984Galloping waves and their relativistic properties - ajp-1985-HarterRovibrational Spectral Fine Structure Of Icosahedral Molecules - Cpl 1986 (Alt Scan)Theory of hyperfine and superfine levels in symmetric polyatomic molecules.
I) Trigonal and tetrahedral molecules: Elementary spin-1/2 cases in vibronic ground states - PRA-1979-Harter-Patterson (Alt scan)II) Elementary cases in octahedral hexafluoride molecules - Harter-PRA-1981 (Alt scan)
Rotation–vibration spectra of icosahedral molecules. I) Icosahedral symmetry analysis and fine structure - harter-weeks-jcp-1989 (Alt scan)II) Icosahedral symmetry, vibrational eigenfrequencies, and normal modes of buckminsterfullerene - weeks-harter-jcp-1989 (Alt scan)III) Half-integral angular momentum - harter-reimer-jcp-1991
Rotation-vibration scalar coupling zeta coefficients and spectroscopic band shapes of buckminsterfullerene - Weeks-Harter-CPL-1991 (Alt scan)Nuclear spin weights and gas phase spectral structure of 12C60 and 13C60 buckminsterfullerene -Harter-Reimer-Cpl-1992 - (Alt1, Alt2 Erratum)Gas Phase Level Structure of C60 Buckyball and Derivatives Exhibiting Broken Icosahedral Symmetry - reimer-diss-1996Fullerene symmetry reduction and rotational level fine structure/ the Buckyball isotopomer 12C 13C59 - jcp-Reimer-Harter-1997 (HiRez)Wave Node Dynamics and Revival Symmetry in Quantum Rotors - harter - jms - 2001Molecular Symmetry and Dynamics - Ch32-Springer Handbooks of Atomic, Molecular, and Optical Physics - Harter-2006Resonance and Revivals
I) QUANTUM ROTOR AND INFINITE-WELL DYNAMICS - ISMSLi2012 (Talk) OSU knowledge BankII) Comparing Half-integer Spin and Integer Spin - Alva-ISMS-Ohio2013-R777 (Talks)III) Quantum Resonant Beats and Revivals in the Morse Oscillators and Rotors - (2013-Li-Diss)
Resonance and Revivals in Quantum Rotors - Comparing Half-integer Spin and Integer Spin - Alva-ISMS-Ohio2013-R777 (Talk)Molecular Eigensolution Symmetry Analysis and Fine Structure - IJMS-harter-mitchell-2013Quantum Revivals of Morse Oscillators and Farey-Ford Geometry - Li-Harter-cpl-2013QTCA Unit 10 Ch 30 - 2013AMOP Ch 0 Space-Time Symmetry - 2019
Web Resources - front page 2014 AMOP
2018 AMOPUAF Physics UTube channel 2017 Group Theory for QM
Classical Mechanics with a Bang!Principles of Symmetry, Dynamics, and Spectroscopy
Quantum Theory for the Computer Age
Modern Physics and its Classical Foundations
*Index/Search is disabled - a web based A.M.O.P. oriented reference page, with thumbnail/previews, greater control over the information display, https://modphys.hosted.uark.edu/markup/AMOP_References.html
and eventually full on Apache-SOLR Index and search for nuanced, whole-site content/metadata level searching.

AMOP reference links (Updated list given on 2nd and 3rd pages of each class presentation)
H atom hyperfine-B-level crossing Unit 8 Ch. 24 p15
Intro spin ½ coupling Unit 8 Ch. 24 p3
Hyperf. theory Ch. 24 p48.
Intro 2p3p coupling Unit 8 Ch. 24 p17. Intro LS-jj coupling Unit 8 Ch. 24 p22.
CG coupling derived (start) Unit 8 Ch. 24 p39.
CG coupling derived (formula) Unit 8 Ch. 24 p44.
Hyperf. theory Ch. 24 p48. Deeper theory ends p53
Lande’ g-factor Unit 8 Ch. 24 p26.
Irrep Tensor building Unit 8 Ch. 25 p5.
Irrep Tensor Tables Unit 8 Ch. 25 p12.
Tensors Applied to d,f-levels. Unit 8 Ch. 25 p21.
Wigner-Eckart tensor Theorem. Unit 8 Ch. 25 p17.
Tensors Applied to high J levels. Unit 8 Ch. 25 p63.
Intro 3-particle coupling. Unit 8 Ch. 25 p28.
Intro 3,4-particle Young Tableaus GrpThLect29 p42.
Young Tableau Magic Formulae GrpThLect29 p46-48.
Int.J.Mol.Sci, 14, 714(2013), QTCA Unit 8 Ch. 23-25, QTCA Unit 9 Ch. 26, PSDS Ch. 5, PSDS Ch. 7
(Int.J.Mol.Sci, 14, 714(2013) p.755-774 , QTCA Unit 7 Ch. 23-26 ), (PSDS - Ch. 5, 7 )
*Index/Search is disabled - a web based A.M.O.P. oriented reference page, with thumbnail/previews, greater control over the information display, https://modphys.hosted.uark.edu/markup/AMOP_References.html
and eventually full on Apache-SOLR Index and search for nuanced, whole-site content/metadata level searching.

Predrag Cvitanovic’s: Birdtrack Notation, Calculations, and SimplificationChaos_Classical_and_Quantum_-_2018-Cvitanovic-ChaosBook
Group Theory - PUP_Lucy_Day_-_Diagrammatic_notation_-_Ch4Simplification_Rules_for_Birdtrack_Operators_-_Alcock-Zeilinger-Weigert-zeilinger-jmp-2017
Group Theory - Birdtracks_Lies_and_Exceptional_Groups_-_Cvitanovic-2011Simplification_rules_for_birdtrack_operators-_jmp-alcock-zeilinger-2017
Birdtracks for SU(N) - 2017-Keppeler
Frank Rioux’s: UMA method of vibrational inductionQuantum_Mechanics_Group_Theory_and_C60_-_Frank_Rioux_-_Department_of_Chemistry_Saint_Johns_U
Symmetry_Analysis_for_H20-_H20GrpTheory-_RiouxQuantum_Mechanics-Group_Theory_and_C60_-_JChemEd-Rioux-1994
Group_Theory_Problems-_Rioux-_SymmetryProblemsXComment_on_the_Vibrational_Analysis_for_C60_and_Other_Fullerenes_Rioux-RSP
Supplemental AMOP Techniques & ExperimentMany Correlation Tables are Molien Sequences - Klee (Draft 2016)
High-resolution_spectroscopy_and_global_analysis_of_CF4_rovibrational_bands_to_model_its_atmospheric_absorption-_carlos-Boudon-jqsrt-2017Symmetry and Chirality - Continuous_Measures_-_Avnir
*Special Topics & Colloquial References
r-process_nucleosynthesis_from_matter_ejected_in_binary_neutron_star_mergers-PhysRevD-Bovard-2017
AMOP reference links (Updated list given on 2nd and 3rd and 4th pages of each class presentation)
*Index/Search is disabled - a web based A.M.O.P. oriented reference page, with thumbnail/previews, greater control over the information display, https://modphys.hosted.uark.edu/markup/AMOP_References.html
and eventually full on Apache-SOLR Index and search for nuanced, whole-site content/metadata level searching.
https://modphys.hosted.uark.edu/ETC/MISC/Chaos_Classical_and_Quantum_-_2018-Cvitanovic-ChaosBook.pdf


















